Corso di Laurea Magistrale in Informatica
|
|
|
- Veronica Calo
- 8 anni fa
- Просмотров:
Транскрипт
1 Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi
2 Misurazione della distanza: triangolazione Se due dispositivi a distanza nota possono puntare lo stesso punto di un oggetto, allora la distanza dell oggetto può essere calcolata conoscendo gli angoli di puntamento. TRIANGOLAZIONE PASSIVA: utilizza due dispositivi di acquisizione di immagini TRIANGOLAZIONE ATTIVA: utilizza un dispositivo di acquisizione di immagini ed una sorgente di luce controllata
3 Sensori di DISTANZA o RANGE o PROFONDITA Il range (o profondità) è la distanza tra il sensore e l oggetto rilevato. La percezione del range è importante per il riconoscimento degli oggetti e dell ambiente e nel controllo della navigazione di un robot; spesso è usato, anche insieme ad un sistema di visione, per ricostruire il modello 3D di una scena Il principio fisico alla base della percezione del range è la triangolazione, ovvero la rilevazione di un oggetto da due punti di vista differenti ad una distanza nota l uno dall altro
4 Misurazione della distanza: tempo di volo La misura della distanza di un oggetto è data dalla misura del tempo che un dato segnale (ad es. un impulso sonoro) impiega a raggiungere l oggetto e a tornare indietro d = (v x t)/2 d = distanza dell oggetto v = velocità del segnale t = tempo impiegato dal segnale per raggiungere l oggetto e tornare indietro Sensore segnale d Oggetto
5 Misurazione della distanza: tempo di volo (esempio: ultrasuoni) d = 0.5 te v v è la velocità media degli impulsi emessi te è il tempo che intercorre da quando l impulso è stato emesso alla ricezione della sua eco.

6 Sensori ad ultrasuoni
7 Sensori ad ultrasuoni

8 Sensori ad ultrasuoni 2 componenti principali: - trasduttore di ultrasuoni (che funziona sia da emettitore che da ricevitore) - elettronica per il calcolo della distanza Range: da 0.3m a 10.5m Ampiezza del fascio: 30 Accuratezza: ca. 25mm Ciclo operativo tipico: - l elettronica di controllo fa inviare ultrasuoni al trasduttore - il ricevitore viene disabilitato per un intervallo di tempo, per evitare false risposte dovute a segnale residuo nel trasduttore - il segnale ricevuto viene amplificato con un guadagno crescente, per compensare la diminuzione di intensità con la distanza - eco di ritorno che superano una certa soglia vengono presi in considerazione e associati a delle distanze calcolate in base al tempo trascorso dalla trasmissione

9 Esempi di applicazione di sensori ad ultrasuoni su robot mobili



10 Sensori US sul B21 e sul Pioneer

11 Navigazione con sensori a ultrasuoni

12 Navigazione con sensori a ultrasuoni
13 LASER RANGE FINDERS A simple pin-hole short-range-finding sensor uses a laser diode as a light source, and a linear photo-diode array as a detector. The range from a sensor to the object is a function of the position of the maximum detected light along the array.
14 LASER RANGE FINDERS
 10 Systematic Error (mm mode) +/- 15 mm Statistic Error (1 Sigma) 5 mm Laser Class 1 Max.")
15 LaserFinder LMS 200 Map building using the LMS 200 laser scanner Technical specification Angular Resolution 1 / 0,5 / 0,25 Response Time (ms) 13 / 26 / 53 Resolution (mm) 10 Systematic Error (mm mode) +/- 15 mm Statistic Error (1 Sigma) 5 mm Laser Class 1 Max. Distance (m) 80 Data Interface RS422 / RS232

16 Hokuyo laser scanner

17 Esempio di mappa costruita con un laser scanner
18 Sensori di prossimità Percezione della presenza di un oggetto in un certo intorno spaziale Sensori a effetto Hall Sensori ottici, a infrarossi
19 SENSORI DI PROSSIMITA Sensori di prossimità passivi: rilevano perturbazioni nell ambiente, come ad esempio modifiche del campo magnetico o elettrico ES: sensori passivi a campo magnetico: sensori ad effetto hall Sensori di prossimità attivi: sfruttano i cambiamenti che avvengono ad un segnale emesso, che possono avvenire in seguito all interruzione o alla riflessione del cammino del segnale verso il ricevitore ES: sensori ottici attivi: emettitore e ricevitore di segnale luminoso
20 Sensore di prossimità a effetto Hall In assenza di un oggetto da rilevare, il sensore capta un forte campo magnetico emesso dal magnete permanente, mentre capta un campo più debole quando un oggetto ferromagnetico si trova nelle immediate vicinanze e varia la conformazione delle linee di forza

21 Sensori di prossimità ottici
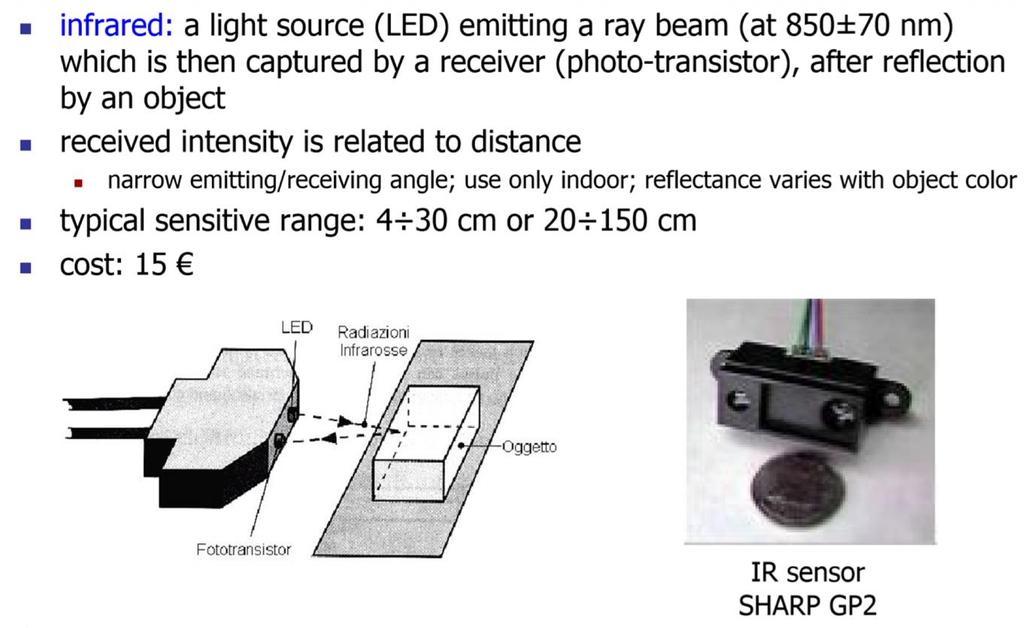
22 Sensori a infrarossi
23 B21 IR sensors Sharp GP2D02 IR Distance Measuring Sensor
Modulo B. Fondamenti di Robotica e Controllo
 Corso di Laurea Specialistica in Informatica Corso di Percezione Robotica Modulo B. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi [email protected] Sommario della lezione
Corso di Laurea Specialistica in Informatica Corso di Percezione Robotica Modulo B. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi [email protected] Sommario della lezione
A DISTANCE AHEAD LED SCANNER MULTIRAGGIO R2100
 A DISTANCE AHEAD LED SCANNER MULTIRAGGIO R2100 Tecnologia Una nuova dimensione per la tec La tecnologia PRT (Pulse Ranging Technology) è una metodologia di misurazione innovativa di Pepperl+Fuchs, particolarmente
A DISTANCE AHEAD LED SCANNER MULTIRAGGIO R2100 Tecnologia Una nuova dimensione per la tec La tecnologia PRT (Pulse Ranging Technology) è una metodologia di misurazione innovativa di Pepperl+Fuchs, particolarmente
Sensori: Proprietà Generali
 Sensori: Proprietà Generali Trasduttore / Transducer Trasduttore: (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti ad un sistema energetico
Sensori: Proprietà Generali Trasduttore / Transducer Trasduttore: (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti ad un sistema energetico
Sensori e Trasduttori
 Sensori e Trasduttori Sensori e Trasduttori Le parole sensore (più usata negli USA) e trasduttore (più comune in Europa) sono entrambe molto utilizzate nella descrizione dei sistemi di misura e controllo.
Sensori e Trasduttori Sensori e Trasduttori Le parole sensore (più usata negli USA) e trasduttore (più comune in Europa) sono entrambe molto utilizzate nella descrizione dei sistemi di misura e controllo.
Sensori per la Robotica
 Sensori per la Robotica Sensori propriocettivi (PC) Misurano grandezze proprie cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione,
Sensori per la Robotica Sensori propriocettivi (PC) Misurano grandezze proprie cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione,
PRINCIPI DI FISICA DEGLI ULTRASUONI. Renato Spagnolo Torino, 10 Maggio 2012
 PRINCIPI DI FISICA DEGLI ULTRASUONI Renato Spagnolo [email protected] Torino, 10 Maggio 2012 Segnale sinusoidale Frequenza f numero di oscillazioni al secondo (Hz) Periodo T durata di un oscillazione
PRINCIPI DI FISICA DEGLI ULTRASUONI Renato Spagnolo [email protected] Torino, 10 Maggio 2012 Segnale sinusoidale Frequenza f numero di oscillazioni al secondo (Hz) Periodo T durata di un oscillazione
SISTEMI A SCANSIONE. Classificazioni, definizioni Topografia vs Scansione Sistemi aerei, mobile mapping Campi di applicazione 29/10/2015
 29/10/2015 SISTEMI A SCANSIONE Classificazioni, definizioni Topografia vs Scansione Sistemi aerei, mobile mapping Campi di applicazione Sistemi a scansione 3D F. Remondino Rilievo e modellazione 3D di
29/10/2015 SISTEMI A SCANSIONE Classificazioni, definizioni Topografia vs Scansione Sistemi aerei, mobile mapping Campi di applicazione Sistemi a scansione 3D F. Remondino Rilievo e modellazione 3D di
Lampada fluorescente compatta
 SSensor da parete PIR IP55 MSA10 Descrizione Dispositivo di controllo e comando dotato di sensore di luminosità e movimento per la gestione dell illuminazione. Il dispositivo ha un grado di protezione
SSensor da parete PIR IP55 MSA10 Descrizione Dispositivo di controllo e comando dotato di sensore di luminosità e movimento per la gestione dell illuminazione. Il dispositivo ha un grado di protezione
SISTEMA DI ACQUISIZIONE DATI
 SISTEMA DI ACQUISIZIONE DATI SENSORE O TRASDUTTORE LINEARIZZAZIONE CONDIZIONAMENTO CONVERTITORE A/D MICROPROCESSORE SENSORE LINEARIZZAZIONE Elemento che rileva la grandezza da controllare. Operazione necessaria
SISTEMA DI ACQUISIZIONE DATI SENSORE O TRASDUTTORE LINEARIZZAZIONE CONDIZIONAMENTO CONVERTITORE A/D MICROPROCESSORE SENSORE LINEARIZZAZIONE Elemento che rileva la grandezza da controllare. Operazione necessaria
DVM77N TERMOMETRO TASCABILE AD INFRAROSSI
 TERMOMETRO TASCABILE AD INFRAROSSI 1. Introduzione TERMOMETRO TASCABILE AD INFRAROSSI A tutti i residenti nell Unione Europea Importanti informazioni ambientali relative a questo prodotto Questo simbolo
TERMOMETRO TASCABILE AD INFRAROSSI 1. Introduzione TERMOMETRO TASCABILE AD INFRAROSSI A tutti i residenti nell Unione Europea Importanti informazioni ambientali relative a questo prodotto Questo simbolo
Velocimetro Vectrino
 Velocimetro Vectrino PRINCIPIO DI FUNZIONAMENTO Il Velocimetro Vectrino misura la velocità dell acqua usando l effetto Doppler. L effetto Doppler si percepisce quando passa un treno il cambiamento di tono
Velocimetro Vectrino PRINCIPIO DI FUNZIONAMENTO Il Velocimetro Vectrino misura la velocità dell acqua usando l effetto Doppler. L effetto Doppler si percepisce quando passa un treno il cambiamento di tono
Lampada fluorescente compatta
 SSensor da soffitto PIR+US IP0 BMSA0 Descrizione Dispositivo di controllo e comando dotato di sensore di luminosità e presenza per la gestione dell illuminazione. Il dispositivo ha un grado di protezione
SSensor da soffitto PIR+US IP0 BMSA0 Descrizione Dispositivo di controllo e comando dotato di sensore di luminosità e presenza per la gestione dell illuminazione. Il dispositivo ha un grado di protezione
Power meter Misure di potenza assoluta Misure di potenza relativa. Misure di potenza. F. Poli. 10 aprile F. Poli Misure di potenza
 Misure di potenza F. Poli 10 aprile 2008 Outline Power meter 1 Power meter 2 3 Misure di potenza Misure di potenza = base della metrologia in fibra ottica. Misure di potenza 1 assoluta: necessarie in relazione
Misure di potenza F. Poli 10 aprile 2008 Outline Power meter 1 Power meter 2 3 Misure di potenza Misure di potenza = base della metrologia in fibra ottica. Misure di potenza 1 assoluta: necessarie in relazione
Switch Sensor da esterno direzionale tecnologia PIR
 witch ensor da esterno direzionale tecnologia IR BMA2102 Descrizione Dispositivo di controllo e comando dotato di 2 differenti sensori che grazie alla combinazione dei quali è in grado di gestire l illuminazione
witch ensor da esterno direzionale tecnologia IR BMA2102 Descrizione Dispositivo di controllo e comando dotato di 2 differenti sensori che grazie alla combinazione dei quali è in grado di gestire l illuminazione
Trasduttori. Molti trasduttori sono sia sensori sia attuatori.
 Trasduttori Sono dispositivi, generalmente elettrici o elettronici, che convertono un tipo di energia relativa a grandezze meccaniche e fisiche in segnali elettrici. Un trasduttore è talvolta definito
Trasduttori Sono dispositivi, generalmente elettrici o elettronici, che convertono un tipo di energia relativa a grandezze meccaniche e fisiche in segnali elettrici. Un trasduttore è talvolta definito
AUTOVELOX RADAR BASIC
 Misura la velocità istantanea di un oggetto in movimento. Basato sull effetto doppler e operante in banda X (10 GHz), nasce a scopo didattico per spiegare come avvengono le misure di velocità radar ed
Misura la velocità istantanea di un oggetto in movimento. Basato sull effetto doppler e operante in banda X (10 GHz), nasce a scopo didattico per spiegare come avvengono le misure di velocità radar ed
Sensore Fotoelettrico a forcella FC7. Sensori Fotoelettrici
 Sensore Fotoelettrico a forcella Sensori Fotoelettrici Catalogo Cod. CAT3IFC1372101 Datasheet italiano Ed.01/2013 2/3 Prodotti forcella Serie Forcella www.microdetectors.com settori e applicazioni linee
Sensore Fotoelettrico a forcella Sensori Fotoelettrici Catalogo Cod. CAT3IFC1372101 Datasheet italiano Ed.01/2013 2/3 Prodotti forcella Serie Forcella www.microdetectors.com settori e applicazioni linee
SISTEMI A SCANSIONE. Laser, principi di funzionamento Sistemi a triangolazione 29/10/2015
 29/10/2015 SISTEMI A SCANSIONE Laser, principi di funzionamento Sistemi a triangolazione B018854 LABORATORIO DI RESTAURO - A.A. 2015-2016 - Corso di Laurea Magistrale ARCHITETTURA (Classe LM-4- cod. B076)
29/10/2015 SISTEMI A SCANSIONE Laser, principi di funzionamento Sistemi a triangolazione B018854 LABORATORIO DI RESTAURO - A.A. 2015-2016 - Corso di Laurea Magistrale ARCHITETTURA (Classe LM-4- cod. B076)
I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di. elaborazione e gestione, hanno un profondo impatto su prodotti di larga
 CAPITOLO 1 INTRODUZIONE AI SENSORI IN FIBRA OTTICA 1.1 La sensoristica 1.1.1. Generalità I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di elaborazione e gestione, hanno un profondo
CAPITOLO 1 INTRODUZIONE AI SENSORI IN FIBRA OTTICA 1.1 La sensoristica 1.1.1. Generalità I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di elaborazione e gestione, hanno un profondo
LIDAR (Light Detection and Ranging)
") LIDAR (Light Detection and Ranging) Si usano laser a infrarossi con ricevitore (fotodiodo) co-locato o dis-locato. Si basano sul back-scattering. Utilizzano lo stesso principio del Radar: lo strumento
LIDAR (Light Detection and Ranging) Si usano laser a infrarossi con ricevitore (fotodiodo) co-locato o dis-locato. Si basano sul back-scattering. Utilizzano lo stesso principio del Radar: lo strumento
Misuratori di portata ad ultrasuoni Serie V700
 Misuratori di portata ad ultrasuoni Serie V700 Caratteristiche principali Misura del volume di fluido (acqua) in transito con principio ad ultrasuoni. Disponibile in modelli : filettati (DN 3/4-2 ) flangiati
Misuratori di portata ad ultrasuoni Serie V700 Caratteristiche principali Misura del volume di fluido (acqua) in transito con principio ad ultrasuoni. Disponibile in modelli : filettati (DN 3/4-2 ) flangiati
Misure di livello con sensori di prossimità Sonar SIMATIC PXS
 Misure di livello con sensori di prossimità Sonar SIMATIC PXS Nel misurare il livello di riempimento di un contenitore è spesso necessario determinare l altezza che assume il materiale sfuso o il liquido
Misure di livello con sensori di prossimità Sonar SIMATIC PXS Nel misurare il livello di riempimento di un contenitore è spesso necessario determinare l altezza che assume il materiale sfuso o il liquido
STONEX CONSTRUCTION Strumenti da cantiere per livellamenti e misurazione di pendenze ad alta precisone
 www.stonexpositioning.com STONEX CONSTRUCTION Strumenti da cantiere per livellamenti e misurazione di pendenze ad alta precisone STONEX L10 LASER ROTANTE MANUALE (H-V) (Art. 71-030001) Semplice da usare,
www.stonexpositioning.com STONEX CONSTRUCTION Strumenti da cantiere per livellamenti e misurazione di pendenze ad alta precisone STONEX L10 LASER ROTANTE MANUALE (H-V) (Art. 71-030001) Semplice da usare,
Descrizione generale del prodotto
 Descrizione generale del prodotto Tipologia : sistema antincendio filare Descrizione generale: I nuovi rilevatori lineari di fumo sono particolarmente idonei a soddisfare le applicazioni nel campo delle
Descrizione generale del prodotto Tipologia : sistema antincendio filare Descrizione generale: I nuovi rilevatori lineari di fumo sono particolarmente idonei a soddisfare le applicazioni nel campo delle
LIUC - Castellanza Maggio 2005. Sensori di Spostamento
 Esempi: Sensori di Spostamento Potenziometri Resistivi Resistore a tre terminali con contatto intermedio (cursore) che fa capo a un tastatore mobile o a un filo avvolto a molla Uscita proporzionale allo
Esempi: Sensori di Spostamento Potenziometri Resistivi Resistore a tre terminali con contatto intermedio (cursore) che fa capo a un tastatore mobile o a un filo avvolto a molla Uscita proporzionale allo
Misure e Tecniche Sperimentali - Alfredo Cigada
 Misure di spostamento senza contatto 2 TRASDUTTORI A CORRENTI PARASSITE 1 Trasduttori a correnti parassite: principio di funzionamento bobina alimentata con corrente alternata ( 1 MHz) 3 superficie metallica
Misure di spostamento senza contatto 2 TRASDUTTORI A CORRENTI PARASSITE 1 Trasduttori a correnti parassite: principio di funzionamento bobina alimentata con corrente alternata ( 1 MHz) 3 superficie metallica
Sensori di Posizione e Velocità
 Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Sensori di Posizione e Velocità POSIZIONE: Potenziometro Sensori di posizione/velocità Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica Grandezza in ingresso: spostamento
Protezione installazioni militari: Sorveglianza con Robot. Autonomi Terrestri ed Aerei
 Protezione installazioni militari: Sorveglianza con Robot Autonomi Terrestri ed Aerei ANUTEI La protezione delle Installazioni Militari in Patria. Misure e Sistemi Roma, 23 Aprile 2009 Requisito Operativo:
Protezione installazioni militari: Sorveglianza con Robot Autonomi Terrestri ed Aerei ANUTEI La protezione delle Installazioni Militari in Patria. Misure e Sistemi Roma, 23 Aprile 2009 Requisito Operativo:
Prodotti. FC forcelle
 Forcelle catalogo 2/3 Prodotti FC forcelle Sensori capacitivi Sensori a forcella Sensori Fotoelettrici a forcella per rilevamento oggetti FC5 p.6 FC6 p.12 Sensori Fotoelettrici a forcella per rilevamento
Forcelle catalogo 2/3 Prodotti FC forcelle Sensori capacitivi Sensori a forcella Sensori Fotoelettrici a forcella per rilevamento oggetti FC5 p.6 FC6 p.12 Sensori Fotoelettrici a forcella per rilevamento
ESERCIZI - SERIE N. 4
 ESERCIZI - SERIE N. 4 EMISSIONE DI SEGNALI ANALOGICI Problema: convertire il risultato da formato binario, ottenuto dall'algoritmo di controllo ed elaborato dall'unità di governo realizzata con tecnologia
ESERCIZI - SERIE N. 4 EMISSIONE DI SEGNALI ANALOGICI Problema: convertire il risultato da formato binario, ottenuto dall'algoritmo di controllo ed elaborato dall'unità di governo realizzata con tecnologia
ONDE ELETTROMAGNETICHE
 Fisica generale II, a.a. 01/014 OND LTTROMAGNTICH 10.1. Si consideri un onda elettromagnetica piana sinusoidale che si propaga nel vuoto nella direzione positiva dell asse x. La lunghezza d onda è = 50.0
Fisica generale II, a.a. 01/014 OND LTTROMAGNTICH 10.1. Si consideri un onda elettromagnetica piana sinusoidale che si propaga nel vuoto nella direzione positiva dell asse x. La lunghezza d onda è = 50.0
Lezione 7. Requisiti di un sistema di controllo
 Lezione 7 Requisiti di un sistema di controllo Componenti di uno schema di controllo Esaurita la trattazione dei sistemi dinamici, si torna ora al problema di controllo, che aveva dato origine a tale studio.
Lezione 7 Requisiti di un sistema di controllo Componenti di uno schema di controllo Esaurita la trattazione dei sistemi dinamici, si torna ora al problema di controllo, che aveva dato origine a tale studio.
Automatic Guided Vehicles (AGV)
") Automatic Guided Vehicles (AGV) www.gruppomovincar.com Strada Lombardore 199, 14 Leinì - TO (Italia) [email protected] Phone: (+39) 11 99 73 316 Automatic Guided Vehicles(AGV) Gamma CM CM 7+ CM 12+
Automatic Guided Vehicles (AGV) www.gruppomovincar.com Strada Lombardore 199, 14 Leinì - TO (Italia) [email protected] Phone: (+39) 11 99 73 316 Automatic Guided Vehicles(AGV) Gamma CM CM 7+ CM 12+
trasduttori di coppia rotanti senza-contatto serie DRFN e DRFN-W
 trasduttori di coppia rotanti senza-contatto serie DRFN e DRFN-W 25 trasduttori di coppia rotanti senza-contatto serie DRFN e DRFN-W I sensori di coppia senza contatto a modulazione di frequenza con misurazione
trasduttori di coppia rotanti senza-contatto serie DRFN e DRFN-W 25 trasduttori di coppia rotanti senza-contatto serie DRFN e DRFN-W I sensori di coppia senza contatto a modulazione di frequenza con misurazione
DAE Digital Audio Experience
 DAE Digital Audio Experience Carmine Ruffino (a.k.a. ) Premesse: Non è un corso di informatica musicale Vuole essere una panoramica sulle problematiche e strumenti usati nel trattamento digitale del suono
DAE Digital Audio Experience Carmine Ruffino (a.k.a. ) Premesse: Non è un corso di informatica musicale Vuole essere una panoramica sulle problematiche e strumenti usati nel trattamento digitale del suono
Ultrasonic Level Meter USM-02. (Estratto dal manuale operatore)
") Ultrasonic Level Meter USM-02 (Estratto dal manuale operatore) Ultrasonic Level Meter USM-02 Estratto dal manuale operatore Pag. 2 Introduzione La misura del livello gioca un ruolo fondamentale in molte
Ultrasonic Level Meter USM-02 (Estratto dal manuale operatore) Ultrasonic Level Meter USM-02 Estratto dal manuale operatore Pag. 2 Introduzione La misura del livello gioca un ruolo fondamentale in molte
Il suono è dovuto alla vibrazione di un corpo elastico Le vibrazioni sono rapidi movimenti di oscillazione del corpo intorno ad una posizione di
 IL SUONO Il suono è dovuto alla vibrazione di un corpo elastico Le vibrazioni sono rapidi movimenti di oscillazione del corpo intorno ad una posizione di equilibrio Un corpo elastico è un corpo che può
IL SUONO Il suono è dovuto alla vibrazione di un corpo elastico Le vibrazioni sono rapidi movimenti di oscillazione del corpo intorno ad una posizione di equilibrio Un corpo elastico è un corpo che può
Sorgenti Ottiche, Classificazioni e parametri
 Sorgenti Ottiche, Classificazioni e parametri Classificazione delle sorgenti ottiche (1/5) Ci occuperemo delle sorgenti ottiche, cioè dei dispositivi attivi che emettono radiazione elettromagnetica alla
Sorgenti Ottiche, Classificazioni e parametri Classificazione delle sorgenti ottiche (1/5) Ci occuperemo delle sorgenti ottiche, cioè dei dispositivi attivi che emettono radiazione elettromagnetica alla
Guida alla Convenzione Apparecchiature elettromedicali per il monitoraggio e servizi connessi per le Pubbliche Amministrazioni Allegato Descrizione
 Guida alla Convenzione monitoraggio e servizi connessi per le Pubbliche Amministrazioni Allegato Descrizione Prodotti - Lotto 4 - INDICE 1. Prodotti... 3 1.1. Caratteristiche del prodotto in configurazione
Guida alla Convenzione monitoraggio e servizi connessi per le Pubbliche Amministrazioni Allegato Descrizione Prodotti - Lotto 4 - INDICE 1. Prodotti... 3 1.1. Caratteristiche del prodotto in configurazione
Lezione 1 ECOGRAFIA VASCOLARE: ELEMANTI DI BASE PER L USO CORRETTO DELL APPARECCHIATURA
 CORSO DI CERTIFICAZIONE DI COMPETENZA in ECOGRAFIA VASCOLARE GENERALE Lezione 1 ECOGRAFIA VASCOLARE: ELEMANTI DI BASE PER L USO CORRETTO DELL APPARECCHIATURA : Direttore: Paolo G. Pino Marco Campana, Antonella
CORSO DI CERTIFICAZIONE DI COMPETENZA in ECOGRAFIA VASCOLARE GENERALE Lezione 1 ECOGRAFIA VASCOLARE: ELEMANTI DI BASE PER L USO CORRETTO DELL APPARECCHIATURA : Direttore: Paolo G. Pino Marco Campana, Antonella
LA LUCE A SERVIZIO DEI BENI CULTURALI: IL LASER SCANNER RGB-ITR PRODUZIONE, CALIBRAZIONE E CONDIVISIONE DI MODELLI 3D DI OPERE D ARTE
 LA LUCE A SERVIZIO DEI BENI CULTURALI: IL LASER SCANNER RGB-ITR PRODUZIONE, CALIBRAZIONE E CONDIVISIONE DI MODELLI 3D DI OPERE D ARTE Sofia Ceccarelli Borsista Consortium GARR TOPICS La Fotonica nel campo
LA LUCE A SERVIZIO DEI BENI CULTURALI: IL LASER SCANNER RGB-ITR PRODUZIONE, CALIBRAZIONE E CONDIVISIONE DI MODELLI 3D DI OPERE D ARTE Sofia Ceccarelli Borsista Consortium GARR TOPICS La Fotonica nel campo
Scheda tecnica online ISD ISD400 TRASMISSIONE OTTICA DI DATI
 Scheda tecnica online ISD00-7 ISD00 ISD00-7 ISD00 A B C D E F H I J K L M N O P Q R S T L'immagine potrebbe non corrispondere Dati tecnici in dettaglio Prestazione Range di misura Sorgente luminosa Informazioni
Scheda tecnica online ISD00-7 ISD00 ISD00-7 ISD00 A B C D E F H I J K L M N O P Q R S T L'immagine potrebbe non corrispondere Dati tecnici in dettaglio Prestazione Range di misura Sorgente luminosa Informazioni
ULTRASUONI VARIE UNITÀ DI PRESSIONE
 ULTRASUONI VARIE UNITÀ DI PRESSIONE Nel S.I. la pressione sonora si misura in Pascal (Pa),... come tutte le pressioni. Altre unità di misura sono il millimetro di mercurio (mmhg = torr), il centimetro
ULTRASUONI VARIE UNITÀ DI PRESSIONE Nel S.I. la pressione sonora si misura in Pascal (Pa),... come tutte le pressioni. Altre unità di misura sono il millimetro di mercurio (mmhg = torr), il centimetro
Sensori. Elaboration Unit Actuators. Sensors. Progettazione Sistemi Elettronici 2013/ /05/2014
 Sensori Sensors Elaboration Unit Actuators 2013/2014 1 Sensori Unità di misura 2013/2014 2 Sensori Electronic characteristics Reference: Analog Devices 2013/2014 3 Sensori Caratteristiche Accuratezza:
Sensori Sensors Elaboration Unit Actuators 2013/2014 1 Sensori Unità di misura 2013/2014 2 Sensori Electronic characteristics Reference: Analog Devices 2013/2014 3 Sensori Caratteristiche Accuratezza:
Corso di Laurea in Ingegneria Civile e Ambientale
 Università degli Studi di Catania Dipartimento di Ingegneria Civile e Architettura Corso di Laurea in Ingegneria Civile e Ambientale Corso di TOPOGRAFIA E CARTOGRAFIA A.A. 20015/2016 Prof. Ing. Giuseppe
Università degli Studi di Catania Dipartimento di Ingegneria Civile e Architettura Corso di Laurea in Ingegneria Civile e Ambientale Corso di TOPOGRAFIA E CARTOGRAFIA A.A. 20015/2016 Prof. Ing. Giuseppe
Il protocollo RS Introduzione. 1.2 Lo Standard RS-232
 1 Il protocollo RS232 1.1 Introduzione Come noto un dispositivo di interfaccia permette la comunicazione tra la struttura hardware di un calcolatore e uno o più dispositivi esterni. Uno degli obiettivi
1 Il protocollo RS232 1.1 Introduzione Come noto un dispositivo di interfaccia permette la comunicazione tra la struttura hardware di un calcolatore e uno o più dispositivi esterni. Uno degli obiettivi
Esercitazione su un sistema di misura della distanza di un bersaglio tramite ultrasuoni in aria
 Esercitazione su un sistema di misura della distanza di un bersaglio tramite ultrasuoni in aria Corso di Elettronica dei Sistemi Analogici e Sensori Laurea Magistrale Ingegneria Elettronica A.A. 2014-2015
Esercitazione su un sistema di misura della distanza di un bersaglio tramite ultrasuoni in aria Corso di Elettronica dei Sistemi Analogici e Sensori Laurea Magistrale Ingegneria Elettronica A.A. 2014-2015
10A. art. NSM26 DISTO CLASSIC 5A MIRINO TELESCOPICO CON CANNOCCHIALE
 LIVELLI LASER DISTO CLASSIC 5A - Consente di misurare esattamente le lunghezze con la semplice pressione di un pulsante. Lo strumento somma singoli valori di misurazione o calcolo aree e volumi. Dalla
LIVELLI LASER DISTO CLASSIC 5A - Consente di misurare esattamente le lunghezze con la semplice pressione di un pulsante. Lo strumento somma singoli valori di misurazione o calcolo aree e volumi. Dalla
SERIE Sx-F/G-SG-ST APPLICAZIONI
 Safety FOTOCELLULE di sicurezza SERIE Sx-F/G-SG-ST Le fotocellule di sicurezza proittorericevitore serie Sx-F/G-SG-ST sono omologate e certificate per funzionare unicamente con le centraline di sicurezza
Safety FOTOCELLULE di sicurezza SERIE Sx-F/G-SG-ST Le fotocellule di sicurezza proittorericevitore serie Sx-F/G-SG-ST sono omologate e certificate per funzionare unicamente con le centraline di sicurezza
Il codice a barre si può definire come una simbologia appositamente formulata per la codifica di informazioni in modo tale che queste ultime possono
 Il codice a barre si può definire come una simbologia appositamente formulata per la codifica di informazioni in modo tale che queste ultime possono essere acquisite in modo automatico. È uno dei sistemi
Il codice a barre si può definire come una simbologia appositamente formulata per la codifica di informazioni in modo tale che queste ultime possono essere acquisite in modo automatico. È uno dei sistemi
3. (Da Veterinaria 2006) Perché esiste il fenomeno della dispersione della luce bianca quando questa attraversa un prisma di vetro?
 Perché esiste il fenomeno della dispersione della luce bianca quando questa attraversa un prisma di vetro?") QUESITI 1 FENOMENI ONDULATORI 1. (Da Medicina 2008) Perché un raggio di luce proveniente dal Sole e fatto passare attraverso un prisma ne emerge mostrando tutti i colori dell'arcobaleno? a) Perché riceve
QUESITI 1 FENOMENI ONDULATORI 1. (Da Medicina 2008) Perché un raggio di luce proveniente dal Sole e fatto passare attraverso un prisma ne emerge mostrando tutti i colori dell'arcobaleno? a) Perché riceve
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi)
") IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
Sensori di spostamento a triangolazione laser. Serie IDP TR CARATTERISTICHE: ATTENZIONE:
 Sensori di spostamento a triangolazione laser Serie IDP TR Dicembre 2010 Rev 0.5 CARATTERISTICHE: Controllo automatico della potenza laser. Misura di bersagli poco cooperanti a ridotta diffusività. Invio
Sensori di spostamento a triangolazione laser Serie IDP TR Dicembre 2010 Rev 0.5 CARATTERISTICHE: Controllo automatico della potenza laser. Misura di bersagli poco cooperanti a ridotta diffusività. Invio
Dispositivi di ingresso. La tastiera. Dispositivi di puntamento. Dispositivi di puntamento
 Dispositivi di ingresso I dispositivi di input ricevono dati dall esterno Traducono i dati in un formato consono al calcolatore Esempi: Dispositivi di puntamento Tastiera Microfono Scanner La tastiera
Dispositivi di ingresso I dispositivi di input ricevono dati dall esterno Traducono i dati in un formato consono al calcolatore Esempi: Dispositivi di puntamento Tastiera Microfono Scanner La tastiera
Deformazioni del suolo di origine antropica in Sicilia rilevate tramite tecniche di interferometria differenziale multitemporale SAR
 Deformazioni del suolo di origine antropica in Sicilia rilevate tramite tecniche di interferometria differenziale multitemporale SAR C. Tolomei, S. Salvi, S. Atzori - INGV CNT F. Canova - Università di
Deformazioni del suolo di origine antropica in Sicilia rilevate tramite tecniche di interferometria differenziale multitemporale SAR C. Tolomei, S. Salvi, S. Atzori - INGV CNT F. Canova - Università di
FC-51: IR Infrared Obstacle Detection Sensor Module 2-30cm
 FC-51: IR Infrared Obstacle Detection Sensor Module 2-30cm Giorgio De Nunzio Giovanni Marsella 0 Premessa: i raggi infrarossi (IR) Fig. 0 Lo spettro delle onde elettromagnetiche, in cui è presente la porzione
FC-51: IR Infrared Obstacle Detection Sensor Module 2-30cm Giorgio De Nunzio Giovanni Marsella 0 Premessa: i raggi infrarossi (IR) Fig. 0 Lo spettro delle onde elettromagnetiche, in cui è presente la porzione
Sistema SRT - Unita centrale di raccolta dati
 Sistema SRT - Unita centrale di raccolta dati L unità di ricezione dati da antenne remote permette di raccogliere i dati letti da tali antenne. È possibile collegare fino 16 antenne poste ad una distanza
Sistema SRT - Unita centrale di raccolta dati L unità di ricezione dati da antenne remote permette di raccogliere i dati letti da tali antenne. È possibile collegare fino 16 antenne poste ad una distanza
La visione spaziale (1)
") La visione spaziale (1) Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano [email protected] http://homes.dsi.unimi.it/~boccignone/giuseppeboccignone_webpage/modelli_percezione.html
La visione spaziale (1) Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano [email protected] http://homes.dsi.unimi.it/~boccignone/giuseppeboccignone_webpage/modelli_percezione.html
Proprio il diverso comportamento di una superficie, in relazione alla luce solare che la colpisce, ne determina il colore
 Cos è un immagine delle immagini IL Colore delle immagini Proprio il diverso comportamento di una superficie, in relazione alla luce solare che la colpisce, ne determina il colore Il colore è però una
Cos è un immagine delle immagini IL Colore delle immagini Proprio il diverso comportamento di una superficie, in relazione alla luce solare che la colpisce, ne determina il colore Il colore è però una
Come iniziare. 1. Come impostare il dispositivo
 IT GUIDA RAPIDA Come iniziare 1. Come impostare il dispositivo 1. Premere un pulsante per riattivare l unità. Il dispositivo ora indicherà come definire le impostazioni di base, compresa la frequenza cardiaca
IT GUIDA RAPIDA Come iniziare 1. Come impostare il dispositivo 1. Premere un pulsante per riattivare l unità. Il dispositivo ora indicherà come definire le impostazioni di base, compresa la frequenza cardiaca
Laser Fabry-Perot Distributed Feedback Laser. Sorgenti ottiche. F. Poli. 22 aprile 2008. F. Poli Sorgenti ottiche
 Sorgenti ottiche F. Poli 22 aprile 2008 Outline Laser Fabry-Perot 1 Laser Fabry-Perot 2 Laser Fabry-Perot Proprietà: sorgente maggiormente utilizzata per i sistemi di telecomunicazione in fibra ottica:
Sorgenti ottiche F. Poli 22 aprile 2008 Outline Laser Fabry-Perot 1 Laser Fabry-Perot 2 Laser Fabry-Perot Proprietà: sorgente maggiormente utilizzata per i sistemi di telecomunicazione in fibra ottica:
Guida alla Convenzione Apparecchiature elettromedicali per il monitoraggio e servizi connessi per le Pubbliche Amministrazioni - edizione 2
 Guida alla Convenzione monitoraggio e servizi connessi per le Pubbliche Amministrazioni - edizione 2 Allegato Descrizione Prodotti - Lotto 4 - INDICE 1. Prodotti... 3 1.1. Caratteristiche del prodotto
Guida alla Convenzione monitoraggio e servizi connessi per le Pubbliche Amministrazioni - edizione 2 Allegato Descrizione Prodotti - Lotto 4 - INDICE 1. Prodotti... 3 1.1. Caratteristiche del prodotto
SERIE BM ULTRA COMPACT STRUMENTI AD ULTRASUONI PER MISURA LIVELLI (versione compatta)
") STRUMENTI D ULTRSUONI PER MISUR LIVELLI (versione compatta) DESCRIZIONE Gli impulsi ad ultrasuoni generati dal trasduttore antenna system, che viaggiano alla velocità del suono, vengono riflessi dalla
STRUMENTI D ULTRSUONI PER MISUR LIVELLI (versione compatta) DESCRIZIONE Gli impulsi ad ultrasuoni generati dal trasduttore antenna system, che viaggiano alla velocità del suono, vengono riflessi dalla
Manuale d uso Giove CA10. Linea GIOVE
 Manuale d uso Giove CA10 Linea GIOVE Indice ----Caratteristiche generali centrale Giove CA10 pag 3 ----Descrizione connessioni Giove CA10 pag 3 ----Descrizione comando Giove RC10 pag 4 ----Schema di collegamento
Manuale d uso Giove CA10 Linea GIOVE Indice ----Caratteristiche generali centrale Giove CA10 pag 3 ----Descrizione connessioni Giove CA10 pag 3 ----Descrizione comando Giove RC10 pag 4 ----Schema di collegamento
Lezione 21 - Onde elettromagnetiche
 Lezione 21 - Onde elettromagnetiche Nella prima metà dell 800 Maxwell dimostrò definitivamente che un raggio di luce non è altro che una configurazione di campi elettrici e magnetici in moto Si deve quindi
Lezione 21 - Onde elettromagnetiche Nella prima metà dell 800 Maxwell dimostrò definitivamente che un raggio di luce non è altro che una configurazione di campi elettrici e magnetici in moto Si deve quindi
Mini Termometro a Infrarossi con Puntatore Laser
 Manuale d Istruzioni Mini Termometro a Infrarossi con Puntatore Laser MODELLO 42500 Introduzione Congratulazioni per aver acquistato il Termometro IR modello 42500. Questo termometro prende misurazioni
Manuale d Istruzioni Mini Termometro a Infrarossi con Puntatore Laser MODELLO 42500 Introduzione Congratulazioni per aver acquistato il Termometro IR modello 42500. Questo termometro prende misurazioni
Lezione 16: La luce strutturata
 Robotica A Lezione 16: La luce strutturata Modificare la luce per semplificare i calcoli Con una sola telecamera In generale, non si possono misurare le distanze. Non tutti gli oggetti possono essere assimilati
Robotica A Lezione 16: La luce strutturata Modificare la luce per semplificare i calcoli Con una sola telecamera In generale, non si possono misurare le distanze. Non tutti gli oggetti possono essere assimilati
DIPLOMA A DISTANZA IN INGEGNERIA ELETTRICA CORSO DI ELETTRONICA INDUSTRIALE DI POTENZA II Lezione 36
 DIPLOMA A DISTANZA IN INGEGNERIA ELETTRICA CORSO DI ELETTRONICA INDUSTRIALE DI POTENZA II Lezione 36 Flicker e metodologie di attenuazione Paolo Mattavelli Dipartimento di Ingegneria Elettrica Universitá
DIPLOMA A DISTANZA IN INGEGNERIA ELETTRICA CORSO DI ELETTRONICA INDUSTRIALE DI POTENZA II Lezione 36 Flicker e metodologie di attenuazione Paolo Mattavelli Dipartimento di Ingegneria Elettrica Universitá
LIM. Tecnologie a confronto pro e contro
 LIM Tecnologie a confronto pro e contro In commercio esistono diversi tipi di LIM, ciascuna con caratteristiche diverse, sebbene in linea generale tutte siano poi molto simili tra loro, differenziandosi
LIM Tecnologie a confronto pro e contro In commercio esistono diversi tipi di LIM, ciascuna con caratteristiche diverse, sebbene in linea generale tutte siano poi molto simili tra loro, differenziandosi
SERIE SG2-HAND APPLICAZIONI
 safety PROTEZIONE MANOLIGHT CURTAINS SERIE SG-HAND Le barriere di sicurezza SAFEasy TM SG rappresentano l evoluzione naturale della serie SF, prodotto di maggior successo della gamma di dispositivi di
safety PROTEZIONE MANOLIGHT CURTAINS SERIE SG-HAND Le barriere di sicurezza SAFEasy TM SG rappresentano l evoluzione naturale della serie SF, prodotto di maggior successo della gamma di dispositivi di
SparkLed Torcia Manuale d'uso Versione 1.1 Italiano
 SparkLed Torcia Manuale d'uso Versione 1.1 Italiano Manuale Torcia Dive System SparkLed - Versione 1.1 Italiano Pagina 1 INDICE 1. Introduzione 2. Descrizione Torcia 3. Certificazioni 4. Avvertenze 5.
SparkLed Torcia Manuale d'uso Versione 1.1 Italiano Manuale Torcia Dive System SparkLed - Versione 1.1 Italiano Pagina 1 INDICE 1. Introduzione 2. Descrizione Torcia 3. Certificazioni 4. Avvertenze 5.