Modulo B. Fondamenti di Robotica e Controllo
|
|
|
- Michele Micheli
- 10 anni fa
- Просмотров:
Транскрипт
1 Corso di Laurea Specialistica in Informatica Corso di Percezione Robotica Modulo B. Fondamenti di Robotica e Controllo Sensori per la robotica Cecilia Laschi [email protected]

2 Sommario della lezione Richiami sulle proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di distanza e di prossimità: sensori a ultrasuoni, laser, a effetto Hall e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia Riferimenti bibliografici: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19 Fu, Gonzalez, Lee, Robotica, McGraw-Hill, Cap.6 Russel, Robot Tactile Sensing, Prentice Hall, Cap.4

3 Sommario della lezione Richiami sulle proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di distanza e di prossimità: sensori a ultrasuoni, laser, a effetto Hall e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia

4 Una prima suddivisione: sensori passivi: convertono direttamente l energia dell ingresso in energia di uscita, senza l ausilio di sorgenti esterne sensori attivi: richiedono energia dall esterno (eccitazione) per la conversione
")
5 Classificazione dei trasduttori Sul tipo di energia in ingresso, in ingresso o ausiliaria Radiante - onde elettromagnetiche: intensità, frequenza, polarizzazione e fase Meccanica - parametri esterni della materia: posizione, velocità, dimensione, durezza, forza Termica: temperatura, gradiente di temperatura, calore Elettrica: potenziale, corrente, resistenza, capacità Magnetica: intensità di campo, densità del flusso, permeabilità Chimica - struttura interna della materia: concentrazioni, struttura del cristallo, stato di aggregazione


6 Trasformazioni di energia in un trasduttore ENERGIA IN INGRESSO ENERGIA AUSILIARIA ENERGIA IN USCITA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE NESSUNA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE

7 Trasformazioni di energia in un trasduttore - Es: ENCODER OTTICO ENERGIA IN INGRESSO ENERGIA AUSILIARIA ENERGIA IN USCITA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE NESSUNA CHIMICA MAGNETICA ELETTRICA TERMICA MECCANICA RADIANTE


8 Proprietà fondamentali di un sensore FUNZIONE DI TRASFERIMENTO CALIBRAZIONE (TARATURA) LINEARITÀ ISTERESI ACCURATEZZA RIPETIBILITÀ RISOLUZIONE SENSIBILITÀ SENSIBILITÀ AL RUMORE VITA UTILE STABILITÀ

9 Funzione di trasferimento La funzione di trasferimento è la relazione tra la grandezza da acquisire e l'uscita del sensore stesso

10 Calibrazione (o Taratura ) L'operazione di calibrazione di un sensore corrisponde alla misurazione della grandezza in uscita per valori noti della grandezza in ingresso al sensore stesso. Per ciclo di calibrazione si intende una prova che copra tutto il campo di misura del sensore; la prova viene suddivisa in due parti, una per valori crescenti della grandezza e l'altra per valori decrescenti


11 Linearità Se la funzione caratteristica input/output di un sensore viene rappresentata graficamente su una scala lineare, la LINEARITÀ è un indicazione della deviazione dell output misurato del sensore rispetto ad una linea retta. La linea retta può essere scelta in vari modi. Ad es: 1) linea retta tra i punti dati dagli output del sensore relativi agli input 0 e 100% 2) linea retta che meglio approssima la curva dell output del sensore con il metodo dei minimi quadrati La linearità corrisponde al massimo scostamento, espresso in % di fondo scala, tra curva di calibrazione e una linea retta di riferimento

.")
12 Isteresi Se un sensore è affetto da ISTERESI, per uno stesso valore di input l output può variare in funzione del fatto che l input stia crescendo o decrescendo al momento della misurazione L ISTERESI corrisponde alla massima differenza tra i due cammini di andata e di ritorno dell'uscita di un sensore durante il ciclo di calibrazione. Si esprime in percentuale del fondo scala (% f.s.).
.")
13 Caratteristica di un sensore di contatto (array tattile)


14 Accuratezza L accuratezza rappresenta l'errore massimo tra la grandezza reale e quella misurata


15 Ripetibilità Quando uno stesso valore di input è applicato ad un sensore, la RIPETIBILITÀ è una misura della variabilità nell output del sensore

16 Accuratezza e Ripetibilità accuratezza 100 (x m -x v ) / x v x m = valore medio x v = valore vero ripetibilità dispersione delle misure misura SI NO SI NO SI SI

17 Risoluzione La RISOLUZIONE è la minima variazione nell input che determina una variazione nell output del sensore


18 Sensibilità Una piccola variazione dell input provoca una piccola variazione corrispondente nell output. La SENSIBILITÀ è il rapporto tra la variazione dell output e la variazione dell input


19 Rumore Il RUMORE è il livello di segnale presente nell output del sensore non provocato dall input del sensore


20 Vita utile E' il tempo per il quale il sensore opera senza modificare le sue prestazioni


21 Stabilità Capacità del sensore a conservare inalterate le sue caratteristiche di funzionamento per un certo intervallo di tempo (lungo, medio, breve).
22 Altri parametri statici Tempo di risposta Range di ingresso Costo, dimensioni e peso Risposta in frequenza Fattori ambientali Temperatura max/min Tempo di warm-up Presenza di gas, fumi,.....
23 alcuni parametri dinamici drift dello zero ad esempio a causa della temperatura drift della sensibilità
24 Funzione dei sensori in un robot Percezione dello stato interno (propriocezione) Percezione dello stato esterno (esterocezione)
25 Funzione dei sensori in un robot Percezione dello stato interno: misura di variabili interne al sistema che sono usate per il controllo del robot. Ad esempio, la posizione dei giunti.
26 Funzione dei sensori in un robot Percezione dello stato esterno: misura di variabili caratterizzanti l ambiente di lavoro, quali ad esempio la distanza, la prossimità, la forza.
27 Sommario della lezione Richiami sulle proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di distanza e di prossimità: sensori a ultrasuoni, laser, a effetto Hall e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
28 Sensori di posizione Switch Encoder ottici Potenziometri Sensori a effetto Hall

29 Switch Sensori di spostamento più semplici Forniscono un solo dato: contatto / non contatto Applicazioni come sensori di posizione: sensori di impatto su robot mobili whisker sensori di fine corsa per i giunti di un manipolatore
30 Switch meccanici LEVETTA CHE VIENE PREMUTA SE AVVIENE UN CONTATTO CONTATTO MECCANICO CHE CHIUDE UN CIRCUITO ELETTRICO V
31 Oral-Joystick: human-machine interface of a feeding assistive device for the severely disabled The Oral-Joystick is a straw-like tube for drinking with a nozzle, connected by a silicone flexible joint, in contact with four cross mechanical switches. The user can push the switches and activate specific functions of the feeding device, only with simple movements of the mouth. Silicone flexible joint Oral-Joystick Nozzle Straw 4 cross mechanical switches
32 Encoder lineari / rotativi ottici / magnetici incrementali / assoluti
33 Encoder rotativi Ruota/link Motore Encoder Albero Motore


34 Encoder ottici

35 Encoder incrementale Contando gli impulsi e conoscendo il numero di linee radiali nel disco si può misurare la rotazione La frequenza del treno di impulsi è proporzionale alla velocità angolare

36 Encoder incrementale Usando due fotointerruttori si può determinare il verso della rotazione, tramite la relazione tra le fasi dei loro treni di impulsi A e B sono sfasati di ¼ di ciclo Una salita di A con B=0 corrisponde a una rotazione in senso orario Una salita di A con B=1 corrisponde a una rotazione in senso anti-orario

37 Encoder assoluto k fotointerruttori k tracce di codice Parola binaria a k bit, che rappresenta 2 k diverse orientazioni del disco Risoluzione angolare di 360 /2 k Fornisce l angolo di rotazione assoluto Ogni posizione è determinata univocamente

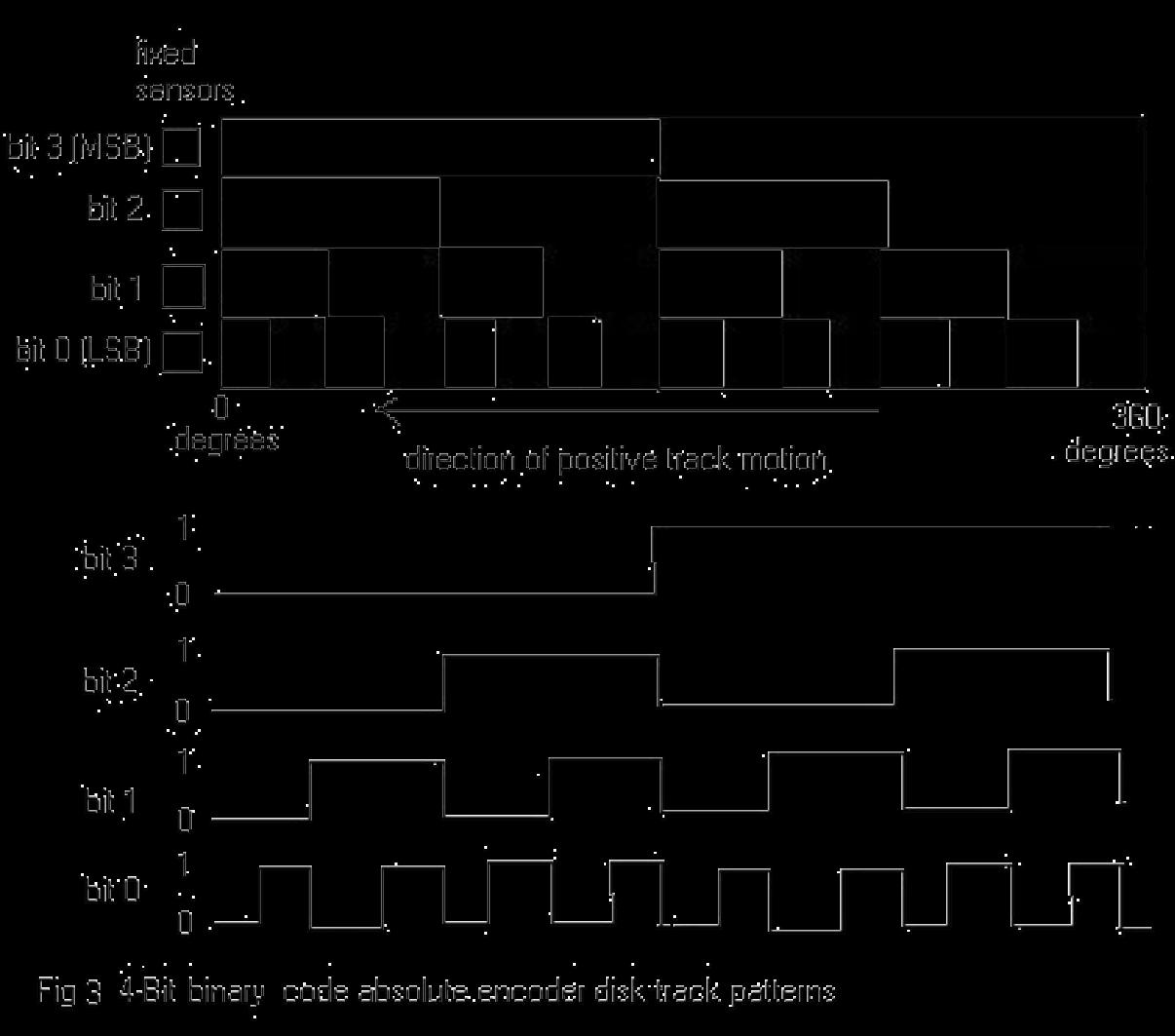
38 Encoder assoluto

39 Encoder assoluto Codice Gray singola transizione Decimale Binario Codice Gray

40 Encoder


41 Potenziometri Resistenza variabile L L 1 T R R 1 T V V output supply L 1 =R 1 L T /R T = =V output L T /V supply
42 Effetto Hall In un conduttore a forma di lamina percorso da corrente i e soggetto ad un campo magnetico di intensita' B, si origina una differenza di potenziale V in una direzione perpendicolare sia alla corrente che al campo magnetico. Il valore di tale differenza di potenziale e' proporzionale all'intensita' di corrente i e all'intensita' del campo magnetico B, mentre e' inversamente proporzionale allo spessore della lamina d: cammino V = R i B / d corrente e - dove R e' detta costante o coefficiente di Hall. B
43 Sensori a effetto Hall Sensore di prossimità a effetto Hall In assenza di oggetto da rivelare il sensore capta un forte campo magnetico emesso dal magnete permanente, mentre capta un campo più debole quando un oggetto ferromagnetico si trova nelle immediate vicinanze e varia la conformazione delle linee di forza Esempio di applicazione come sensore di posizione
 (Operational range: 0 90 degrees, Resolution: <5 degrees).")
44 Sensori a effetto Hall come sensori di posizione in robotica Detection of angular joint displacements 5+1 Encoders in the Actuation System 15 Embedded Joint Angle Sensors (Hall effect) (Operational range: 0 90 degrees, Resolution: <5 degrees).

45 Hall-effect joint angle sensors Gap
46 Esempio di applicazione di sensori a effetto Hall Guanto sensorizzato per rilevare la posizione delle dita
47 Sommario della lezione Richiami sulle proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di distanza e di prossimità: sensori a ultrasuoni, laser, a effetto Hall e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia

48 Misurazione della distanza: triangolazione Se due dispositivi a distanza nota possono puntare lo stesso punto di un oggetto, allora la distanza dell oggetto può essere calcolata conoscendo gli angoli di puntamento. TRIANGOLAZIONE PASSIVA: utilizza due dispositivi di acquisizione di immagini TRIANGOLAZIONE ATTIVA: utilizza un dispositivo di acquisizione di immagini ed una sorgente di luce controllata
49 Sensori di DISTANZA o RANGE o PROFONDITA Il range (o profondità) è la distanza tra il sensore e l oggetto rilevato. La percezione del range è importante per il riconoscimento degli oggetti e dell ambiente e nel controllo della navigazione di un robot; spesso è usato, anche insieme ad un sistema di visione, per ricostruire il modello 3D di una scena Il principio fisico alla base della percezione del range è la triangolazione, ovvero la rilevazione di un oggetto da due punti di vista differenti ad una distanza nota l uno dall altro
50 Triangolazione passiva usando gli angoli di vergenza

51 Triangolazione passiva usando le proiezioni dello stesso punto sulle 2 immagini
52 Triangolazione passiva con telecamere
53 Triangolazione attiva
54 Triangolazione attiva con telecamera

55 Misurazione della distanza: luce strutturata E un estensione della triangolazione attiva che utilizza una figura luminosa anziché un punto luminoso e calcola la distanza in base alla distorsione della figura
 impiega a raggiungere l oggetto e a tornare indietro d = (v x t)/2 d = distanza dell oggetto v = velocità del segnale t = tempo impiegato dal segnale per raggiungere l")
56 Misurazione della distanza: tempo di volo La misura della distanza di un oggetto è data dalla misura del tempo che un dato segnale (ad es. un impulso sonoro) impiega a raggiungere l oggetto e a tornare indietro d = (v x t)/2 d = distanza dell oggetto v = velocità del segnale t = tempo impiegato dal segnale per raggiungere l oggetto e tornare indietro Sensore segnale d Oggetto
57 Misurazione della distanza: tempo di volo (esempio: ultrasuoni) d = 0.5 t e v v è la velocità media degli impulsi emessi t e è il tempo che intercorre da quando l impulso è stato emesso alla ricezione della sua eco.
58 Sommario della lezione Richiami sulle proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di distanza e di prossimità: sensori a ultrasuoni, laser, a effetto Hall e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
59 Sensori ad ultrasuoni

60 Ciclo operativo tipico: - l elettronica di controllo fa inviare ultrasuoni al trasduttore - il ricevitore viene disabilitato per un intervallo di tempo, per evitare false risposte dovute a segnale residuo nel trasduttore - il segnale ricevuto viene amplificato con un guadagno crescente, per compensare la diminuzione di intensità con la distanza - eco di ritorno che superano una certa soglia vengono presi in considerazione e associati a delle distanze calcolate in base al tempo trascorso dalla trasmissione Sensori ad ultrasuoni 2 componenti principali: - trasduttore di ultrasuoni (che funziona sia da emettitore che da ricevitore) - elettronica per il calcolo della distanza Range: da 0.3m a 10.5m Ampiezza del fascio: 30 Accuratezza: ca. 25mm
61 Esempi di applicazione di sensori ad ultrasuoni su robot mobili

62 B21 US sensors
63 LASER RANGE FINDERS A simple pin-hole short-range-finding sensor uses a laser diode as a light source, and a linear photo-diode array as a detector. The range from a sensor to the object is a function of the position of the maximum detected light along the array.
64 B21 LaserFinder LMS 200 Map building using the LMS 200 laser scanner Technical specification Angular Resolution 1 / 0,5 / 0,25 Response Time (ms) 13 / 26 / 53 Resolution (mm) 10 Systematic Error (mm mode) +/- 15 mm Statistic Error (1 Sigma) 5 mm Laser Class 1 Max. Distance (m) 80 Data Interface RS422 / RS232
65 Sensori di prossimità Percezione della presenza di un oggetto in un certo intorno spaziale Sensori a effetto Hall Sensori ottici, a infrarossi
66 SENSORI DI PROSSIMITA Sensori di prossimità passivi: rilevano perturbazioni nell ambiente, come ad esempio modifiche del campo magnetico o elettrico ES: sensori passivi a campo magnetico: sensori ad effetto hall Sensori di prossimità attivi: sfruttano i cambiamenti che avvengono ad un segnale emesso, che possono avvenire in seguito all interruzione o alla riflessione del cammino del segnale verso il ricevitore ES: sensori ottici attivi: emettitore e ricevitore di segnale luminoso
67 Sensore di prossimità a effetto Hall In assenza di un oggetto da rilevare, il sensore capta un forte campo magnetico emesso dal magnete permanente, mentre capta un campo più debole quando un oggetto ferromagnetico si trova nelle immediate vicinanze e varia la conformazione delle linee di forza
68 Sensori di prossimità ottici

69 B21 IR sensors Sharp GP2D02 IR Distance Measuring Sensor
70 Sommario della lezione Richiami sulle proprietà fondamentali dei sensori Sensori di posizione: switch, encoders, potenziometri, sensori a effetto Hall Misurazione della distanza: triangolazione, tempo di volo Sensori di distanza e di prossimità: sensori a ultrasuoni, laser, a effetto Hall e a infrarossi Sensori di forza: strain gauge e sensori di forza/coppia
71 Strutture a celle di carico Struttura esterna rigida Mezzo per misurare la forza applicata Elemento misuratore
, oltre la quale si deforma plasticamente sforzo p A0 deformazione l l 0 Rapporto di Poisson: A A 0 Modulo di")
72 Richiami di comportamento meccanico dei materiali Un materiale sottoposto a uno sforzo si deforma con comportamento elastico fino a una soglia dello sforzo (limite elastico), oltre la quale si deforma plasticamente sforzo p A0 deformazione l l 0 Rapporto di Poisson: A A 0 Modulo di elasticità: E

73 Effetto piezoresistivo Ogni materiale varia la propria resistenza elettrica in funzione della deformazione V In un parallelepipedo metallico: con ρ = resistività del materiale, L, W, H = dimensioni del parallelepipedo R R 2 ν = rapporto di Poisson del materiale R L WH V=RI

74 Strain gauge La forma del sensore serve a renderlo più sensibile in una direzione che nell altra Fattore di Gauge: G R R 1 2 ν = rapporto di Poisson del materiale

75 Strain gauges
76 Sensori che usano strain gauge
77 Cable tension sensor

78 Sensori di forza/coppia a 3 componenti Strutture meccaniche con direzioni di deformazione preferenziali, date da indebolimenti, su 3 assi Strain gauge disposti sugli indebolimenti
79 w w w w w w w w c c c c c c c c c c c c c c c c f f f s z s y s x s z s y s x Sensore triassiale di forza/coppia a croce di Malta Le forze e le coppie vengono misurate a partire dalle misure delle variazioni di resistenza degli strain gauge, moltiplicandole per una matrice di coefficienti tipica del sensore La matrice dei coefficienti si costruisce con una procedura di calibrazione in cui si applicano forze note
80 Sensori di Forza: applicazione
 Encoder sui motori del braccio e della base mobile Sensori a ultrasuoni Switch sul paraurti Potenziometri nel sistema di")
81 Esempio di utilizzo di sensori su un prototipo di robot mobile Sensori a effetto Hall sui giunti delle dita Sensore di forza/coppia sul polso (con strain gauge) Encoder sui motori del braccio e della base mobile Sensori a ultrasuoni Switch sul paraurti Potenziometri nel sistema di docking
Corso di Laurea Magistrale in Informatica
 Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi [email protected] Misurazione della distanza: triangolazione Se due dispositivi a distanza nota
Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi [email protected] Misurazione della distanza: triangolazione Se due dispositivi a distanza nota
Sensori: Proprietà Generali
 Sensori: Proprietà Generali Trasduttore: Trasduttore / Transducer (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti a un sistema energetico
Sensori: Proprietà Generali Trasduttore: Trasduttore / Transducer (dal latino trasducere = condurre attraverso) dispositivo fisico progettato per trasformare grandezze appartenenti a un sistema energetico
Cenni sui trasduttori. Con particolare attenzione al settore marittimo
 Cenni sui trasduttori Con particolare attenzione al settore marittimo DEFINIZIONI Un Trasduttore è un dispositivo che converte una grandezza fisica in un segnale di natura elettrica Un Sensore è l elemento
Cenni sui trasduttori Con particolare attenzione al settore marittimo DEFINIZIONI Un Trasduttore è un dispositivo che converte una grandezza fisica in un segnale di natura elettrica Un Sensore è l elemento
E possibile classificazione i trasduttori in base a diversi criteri, ad esempio: Criterio Trasduttori Caratteristiche
 PREMESSA In questa lezione verranno illustrate la classificazione delle diverse tipologie di trasduttori utilizzati nei sistemi di controllo industriali ed i loro parametri caratteristici. CLASSIFICAZIONE
PREMESSA In questa lezione verranno illustrate la classificazione delle diverse tipologie di trasduttori utilizzati nei sistemi di controllo industriali ed i loro parametri caratteristici. CLASSIFICAZIONE
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
LIUC - Castellanza Maggio 2005. Sensori di Spostamento
 Esempi: Sensori di Spostamento Potenziometri Resistivi Resistore a tre terminali con contatto intermedio (cursore) che fa capo a un tastatore mobile o a un filo avvolto a molla Uscita proporzionale allo
Esempi: Sensori di Spostamento Potenziometri Resistivi Resistore a tre terminali con contatto intermedio (cursore) che fa capo a un tastatore mobile o a un filo avvolto a molla Uscita proporzionale allo
6 Cenni sulla dinamica dei motori in corrente continua
 6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
6 Cenni sulla dinamica dei motori in corrente continua L insieme di equazioni riportato di seguito, costituisce un modello matematico per il motore in corrente continua (CC) che può essere rappresentato
Sensori di Sensori di spost spos am ent ent a cont cont t at o Pot P enziom etri enziom
 Cap 8: SENSORI PER MISURE DI MOTO Per misure di moto intendiamo le misure di spostamenti, velocità ed accelerazioni di oggetti, di grandezze cinematiche sia lineari che angolari. Sensori di spostamento
Cap 8: SENSORI PER MISURE DI MOTO Per misure di moto intendiamo le misure di spostamenti, velocità ed accelerazioni di oggetti, di grandezze cinematiche sia lineari che angolari. Sensori di spostamento
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
Modello generale di trasduttore Come leggere la scheda tecnica di un trasduttore
 Modello generale di trasduttore Come leggere la scheda tecnica di un trasduttore Modello generale di trasduttore Informazioni sulle caratteristiche fisiche Sistema di misura Catena di misura Dati numerici
Modello generale di trasduttore Come leggere la scheda tecnica di un trasduttore Modello generale di trasduttore Informazioni sulle caratteristiche fisiche Sistema di misura Catena di misura Dati numerici
CONVERTITORI DIGITALE/ANALOGICO (DAC)
") CONVERTITORI DIGITALE/ANALOGICO (DAC) Un convertitore digitale/analogico (DAC: digital to analog converter) è un circuito che fornisce in uscita una grandezza analogica proporzionale alla parola di n bit
CONVERTITORI DIGITALE/ANALOGICO (DAC) Un convertitore digitale/analogico (DAC: digital to analog converter) è un circuito che fornisce in uscita una grandezza analogica proporzionale alla parola di n bit
PRINCIPI DI TRASDUZIONE
 PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
Cap 12 12 -- Misure di vi braz di vi ioni
 Cap 12 - Misure di vibrazioni Le vibrazioni sono poi da sempre uno strumento di diagnostica di macchine e sistemi meccanici 1 Le direttive CEE 89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE, obbliga tutti
Cap 12 - Misure di vibrazioni Le vibrazioni sono poi da sempre uno strumento di diagnostica di macchine e sistemi meccanici 1 Le direttive CEE 89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE, obbliga tutti
Estensimetro. in variazioni di resistenza.
 Estensimetro La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la variazione di geometria che l oggetto in questione subisce. L estensimetro estensimetro,
Estensimetro La misura di una forza incidente su di un oggetto può essere ottenuta misurando la deformazione o la variazione di geometria che l oggetto in questione subisce. L estensimetro estensimetro,
Controllo di un Motore Elettrico in Corrente Continua
 Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy [email protected] Programmazione
Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy [email protected] Programmazione
MISURE DIMENSIONALI MISURE DIMENSIONALI: - Sistemi a contatto. - Sistemi senza contatto.
 MISURE DIMENSIONALI Modello: tubo cilindrico misurato con forcelle del calibro caratterizzate da superfici piane e parallele fra loro. MISURE DIMENSIONALI: D Diametro del tubo misurato con calibro. Ripetendo
MISURE DIMENSIONALI Modello: tubo cilindrico misurato con forcelle del calibro caratterizzate da superfici piane e parallele fra loro. MISURE DIMENSIONALI: D Diametro del tubo misurato con calibro. Ripetendo
Si classifica come una grandezza intensiva
 CAP 13: MISURE DI TEMPERATURA La temperatura È osservata attraverso gli effetti che provoca nelle sostanze e negli oggetti Si classifica come una grandezza intensiva Può essere considerata una stima del
CAP 13: MISURE DI TEMPERATURA La temperatura È osservata attraverso gli effetti che provoca nelle sostanze e negli oggetti Si classifica come una grandezza intensiva Può essere considerata una stima del
MISURE DI GRANDEZZE ELETTRICHE
 MISURE DI GRANDEZZE ELETTRICHE La tecnologia oggi permette di effettuare misure di grandezze elettriche molto accurate: precisioni dell ordine dello 0,1 0,2% sono piuttosto facilmente raggiungibili. corrente:
MISURE DI GRANDEZZE ELETTRICHE La tecnologia oggi permette di effettuare misure di grandezze elettriche molto accurate: precisioni dell ordine dello 0,1 0,2% sono piuttosto facilmente raggiungibili. corrente:
TRASDUTTORI di POSIZIONE
 TRASDUTTORI di POSIZIONE Numerosi trasduttori sono stati messi a punto per il rilievo di posizione, in movimenti sia rettilinei sia rotatori. I potenziometri, rettilinei o circolari selezionano una quota
TRASDUTTORI di POSIZIONE Numerosi trasduttori sono stati messi a punto per il rilievo di posizione, in movimenti sia rettilinei sia rotatori. I potenziometri, rettilinei o circolari selezionano una quota
Distanziometro Laser ad alta velocità IDP-RFD100K CARATTERISTICHE: DESCRIZIONE:
 Distanziometro Laser ad alta velocità CARATTERISTICHE: Elevata velocità di acquisizione pari a 100Ksps (T acq =10us) Elevata accuratezza fino a ±5mm Elevata ripetibilità fino a ±0.2mm Distanza di misura
Distanziometro Laser ad alta velocità CARATTERISTICHE: Elevata velocità di acquisizione pari a 100Ksps (T acq =10us) Elevata accuratezza fino a ±5mm Elevata ripetibilità fino a ±0.2mm Distanza di misura
Incertezza delle misure e metodi di controllo
 Corso di Formazione APC MONITORAGGIO DI SPOSTAMENTI NEL SOTTOSUOLO E PRESSIONI INTERSTIZIALI SOTTO FALDA Incertezza delle misure e metodi di controllo Lucia Simeoni Università degli Studi dell Aquila Dipartimento
Corso di Formazione APC MONITORAGGIO DI SPOSTAMENTI NEL SOTTOSUOLO E PRESSIONI INTERSTIZIALI SOTTO FALDA Incertezza delle misure e metodi di controllo Lucia Simeoni Università degli Studi dell Aquila Dipartimento
TRASDUTTORI di FORZA E PRESSIONE
 Fra i trasduttori di forza, gli estensimetri, o stain gage, si basano sull aumento di resistenza che si produce in un filo metallico sottoposto a trazione a causa dell aumento di lunghezza e della contemporanea
Fra i trasduttori di forza, gli estensimetri, o stain gage, si basano sull aumento di resistenza che si produce in un filo metallico sottoposto a trazione a causa dell aumento di lunghezza e della contemporanea
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
Circuiti di condizionamento per sensori resistivi
 Perché non è possibile utilizzare direttamente un partitore di tensione per condizionare uno strain gage? isposta: Per problemi di risoluzione: una d piccola provocherebbe una dout difficile da misurare;
Perché non è possibile utilizzare direttamente un partitore di tensione per condizionare uno strain gage? isposta: Per problemi di risoluzione: una d piccola provocherebbe una dout difficile da misurare;
Esempi di Sensori: Sensori di Temperatura Sensori a Lamina Bimetallica
 Esempi di Sensori: Sensori di Temperatura Sensori a Lamina Bimetallica Tratto da Sensors and Signal Conditioning R. Pallas Areny, J.G. Webster, John Wiley and Sons 2001. Fondamenti della Misurazione -
Esempi di Sensori: Sensori di Temperatura Sensori a Lamina Bimetallica Tratto da Sensors and Signal Conditioning R. Pallas Areny, J.G. Webster, John Wiley and Sons 2001. Fondamenti della Misurazione -
Estensimetri o Strain Gauges
 Estensimetri o Strain Gauges Sforzi e deformazioni in un corpo elastico Consideriamo un parallelepipedo di materiale W H F dove è la lunghezza e S = W H è la sezione. Definiamo sforzo (stress) il rapporto
Estensimetri o Strain Gauges Sforzi e deformazioni in un corpo elastico Consideriamo un parallelepipedo di materiale W H F dove è la lunghezza e S = W H è la sezione. Definiamo sforzo (stress) il rapporto
Sensor Systems ADM-E2-M
 Sistema di riferimento per navigazione ed assetto Sensor Systems ADM-E2-M Datasheet 2010 Sensor Systems Srl La piattaforma inerziale ADM-E2-M Attitude and Heading Reference System (AHRS) è un sistema ad
Sistema di riferimento per navigazione ed assetto Sensor Systems ADM-E2-M Datasheet 2010 Sensor Systems Srl La piattaforma inerziale ADM-E2-M Attitude and Heading Reference System (AHRS) è un sistema ad
Sensori e trasduttori. Dispense del corso ELETTRONICA L Luca De Marchi
 Sensori e trasduttori Dispense del corso ELETTRONICA L Luca De Marchi Gli Obiettivi Struttura generale di sistemi di controllo e misura Sensori, trasduttori, attuatori Prima classificazione dei sistemi-sensori
Sensori e trasduttori Dispense del corso ELETTRONICA L Luca De Marchi Gli Obiettivi Struttura generale di sistemi di controllo e misura Sensori, trasduttori, attuatori Prima classificazione dei sistemi-sensori
Sensori di Posizione, Velocità, Accelerazione
 Sensori di Posizione, Velocità, Accelerazione POSIZIONE: Sensori di posizione/velocità Potenziometro Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica ACCELERAZIONE Dinamo
Sensori di Posizione, Velocità, Accelerazione POSIZIONE: Sensori di posizione/velocità Potenziometro Trasformatore Lineare Differenziale (LDT) Encoder VELOCITA Dinamo tachimetrica ACCELERAZIONE Dinamo
Trasduttore digitale Rettilineo
 Trasduttori digitali Un trasduttore digitale fornisce, costruttivamente, in uscita un segnale digitale; I più diffusi trasduttori digitali sono i codificatori di posizione digitale chiamatiencoder. Gli
Trasduttori digitali Un trasduttore digitale fornisce, costruttivamente, in uscita un segnale digitale; I più diffusi trasduttori digitali sono i codificatori di posizione digitale chiamatiencoder. Gli
Forza. Forza. Esempi di forze. Caratteristiche della forza. Forze fondamentali CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA
 Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
Forza CONCETTO DI FORZA E EQUILIBRIO, PRINCIPI DELLA DINAMICA Cos è una forza? la forza è una grandezza che agisce su un corpo cambiando la sua velocità e provocando una deformazione sul corpo 2 Esempi
SENSORI. Sensori propriocettivi posizioni dei giunti velocità dei giunti coppia ai giunti
 SENSORI Sensori propriocettivi posizioni dei giunti velocità dei giunti coppia ai giunti Sensori esterocettivi sensori di forza sensori tattili sensori di prossimità sensori di campo sistemi di visione
SENSORI Sensori propriocettivi posizioni dei giunti velocità dei giunti coppia ai giunti Sensori esterocettivi sensori di forza sensori tattili sensori di prossimità sensori di campo sistemi di visione
 ET CONTROLLO CORRENTI INDOTTE CORSO PER OPERATORI DI II LIVELLO TOTALE ORE : 88 PARTE 1 - PRINCIPI DEL CONTROLLO CON CORRENTI INDOTTE 1.1) Scopo e limitazioni del metodo di controllo con correnti indotte
ET CONTROLLO CORRENTI INDOTTE CORSO PER OPERATORI DI II LIVELLO TOTALE ORE : 88 PARTE 1 - PRINCIPI DEL CONTROLLO CON CORRENTI INDOTTE 1.1) Scopo e limitazioni del metodo di controllo con correnti indotte
LA TERMOGRAFIA SPETTRO ONDE ELETTROMAGNETICHE
 SPETTRO ONDE ELETTROMAGNETICHE La radiazione elettromagnetica è un mezzo di trasmissione dell energia sotto forma di onde aventi entrambe le componenti elettriche e magnetiche. La sequenza ordinata delle
SPETTRO ONDE ELETTROMAGNETICHE La radiazione elettromagnetica è un mezzo di trasmissione dell energia sotto forma di onde aventi entrambe le componenti elettriche e magnetiche. La sequenza ordinata delle
Misure Elettroniche, Sensori e Trasduttori 1
 Università degli Studi di Genova Corso di Laurea in Ingegneria Elettronica (CL) Misure Elettroniche, Sensori e Trasduttori Docente: Prof. Giacomo Mario Bisio Esempi di domande d esame. Struttura e principi
Università degli Studi di Genova Corso di Laurea in Ingegneria Elettronica (CL) Misure Elettroniche, Sensori e Trasduttori Docente: Prof. Giacomo Mario Bisio Esempi di domande d esame. Struttura e principi
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Indice. Prefazione all edizione italiana Prefazione all edizione americana. Capitolo 1 Introduzione: onde e fasori 1
 Indice Prefazione all edizione italiana Prefazione all edizione americana VII IX Capitolo 1 Introduzione: onde e fasori 1 Generalità 1 1.1 Dimensioni, unità di misura e notazione 2 1.2 La natura dell elettromagnetismo
Indice Prefazione all edizione italiana Prefazione all edizione americana VII IX Capitolo 1 Introduzione: onde e fasori 1 Generalità 1 1.1 Dimensioni, unità di misura e notazione 2 1.2 La natura dell elettromagnetismo
I.P.S.I.A. BOCCHIGLIERO
 I.P.S.I.A. di BOCCHIGLIERO a.s. 2012/2013 -classe V- Materia: Sistemi Automazione e Organizzazione della Produzione ----Trasduttori e sensori---- Alunna: Rossella Serafini prof. Ing. Zumpano Luigi TRASDUTTORI
I.P.S.I.A. di BOCCHIGLIERO a.s. 2012/2013 -classe V- Materia: Sistemi Automazione e Organizzazione della Produzione ----Trasduttori e sensori---- Alunna: Rossella Serafini prof. Ing. Zumpano Luigi TRASDUTTORI
La corrente elettrica La resistenza elettrica La seconda legge di Ohm Resistività e temperatura L effetto termico della corrente
 Unità G16 - La corrente elettrica continua La corrente elettrica La resistenza elettrica La seconda legge di Ohm Resistività e temperatura L effetto termico della corrente 1 Lezione 1 - La corrente elettrica
Unità G16 - La corrente elettrica continua La corrente elettrica La resistenza elettrica La seconda legge di Ohm Resistività e temperatura L effetto termico della corrente 1 Lezione 1 - La corrente elettrica
Indice 3. Elenco delle figure 9. 1 Introduzione 17. I Azionamenti e Macchine Elettriche 1
 Indice Indice 3 Elenco delle figure 9 1 Introduzione 17 I Azionamenti e Macchine Elettriche 1 2 Elementi di macchine elettriche 3 2.1 Motore brushed DC........................ 3 2.1.1 Modello matematico
Indice Indice 3 Elenco delle figure 9 1 Introduzione 17 I Azionamenti e Macchine Elettriche 1 2 Elementi di macchine elettriche 3 2.1 Motore brushed DC........................ 3 2.1.1 Modello matematico
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 LA STRUMENTAZIONE DI MISURA OCCORRENTE PER UN SISTEMA
SENSORI E TRASDUTTORI Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Dipartimento di Ingegneria dell Automazione e dei Sistemi 1 LA STRUMENTAZIONE DI MISURA OCCORRENTE PER UN SISTEMA
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
3 PROVE MECCANICHE DEI MATERIALI METALLICI
 3 PROVE MECCANICHE DEI MATERIALI METALLICI 3.1 Prova di trazione 3.1.3 Estensimetri La precisione e la sensibilità dello strumento variano a seconda dello scopo cui esso è destinato. Nella prova di trazione
3 PROVE MECCANICHE DEI MATERIALI METALLICI 3.1 Prova di trazione 3.1.3 Estensimetri La precisione e la sensibilità dello strumento variano a seconda dello scopo cui esso è destinato. Nella prova di trazione
Tecnologie dei Sistemi di Automazione e Controllo
 Tecnologie dei Sistemi di Automazione e Controllo Prof. Gianmaria De Tommasi Lezione 2 Carattersitiche dei sensori Sensori di moto Corso di Laurea Codice insegnamento Email docente Anno accademico N39
Tecnologie dei Sistemi di Automazione e Controllo Prof. Gianmaria De Tommasi Lezione 2 Carattersitiche dei sensori Sensori di moto Corso di Laurea Codice insegnamento Email docente Anno accademico N39
MATRICE DELLE COMPETENZE DI SCIENZE E TECNOLIE APPLICATE INDIRIZZO DI MECCANICA, MECCATRONICA ED ENERGIA
 MATRICE DELLE COMPETENZE DI SCIENZE E TECNOLIE APPLICATE INDIRIZZO DI MECCANICA, MECCATRONICA ED ENERGIA Competenze in esito al quinquennio (dall Allegato C del Regolamento) 1. Individuare le proprietà
MATRICE DELLE COMPETENZE DI SCIENZE E TECNOLIE APPLICATE INDIRIZZO DI MECCANICA, MECCATRONICA ED ENERGIA Competenze in esito al quinquennio (dall Allegato C del Regolamento) 1. Individuare le proprietà
quale agisce una forza e viceversa. situazioni. applicate a due corpi che interagiscono. Determinare la forza centripeta di un
 CLASSE Seconda DISCIPLINA Fisica ORE SETTIMANALI 3 TIPO DI PROVA PER GIUDIZIO SOSPESO Test a risposta multipla MODULO U.D Conoscenze Abilità Competenze Enunciato del primo principio della Calcolare l accelerazione
CLASSE Seconda DISCIPLINA Fisica ORE SETTIMANALI 3 TIPO DI PROVA PER GIUDIZIO SOSPESO Test a risposta multipla MODULO U.D Conoscenze Abilità Competenze Enunciato del primo principio della Calcolare l accelerazione
Le macchine elettriche
 Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Descrizione generale del prodotto
 Descrizione generale del prodotto Tipologia : sistema antincendio filare Descrizione generale: I nuovi rilevatori lineari di fumo sono particolarmente idonei a soddisfare le applicazioni nel campo delle
Descrizione generale del prodotto Tipologia : sistema antincendio filare Descrizione generale: I nuovi rilevatori lineari di fumo sono particolarmente idonei a soddisfare le applicazioni nel campo delle
SCIENZE INTEGRATE FISICA
 CLASSE DISCIPLINA ORE SETTIMANALI TIPO DI PROVA PER GIUDIZIO SOSPESO MODULO 1: Il moto e l energia I concetti di sistema di riferimento e le grandezze cinematiche. I diversi tipi di rappresentazione del
CLASSE DISCIPLINA ORE SETTIMANALI TIPO DI PROVA PER GIUDIZIO SOSPESO MODULO 1: Il moto e l energia I concetti di sistema di riferimento e le grandezze cinematiche. I diversi tipi di rappresentazione del
Misure di.. FORZA. P = F v
 Misure di.. FORZA In FISICA prodotto di una massa per una F = m a accelerazione In FISIOLOGIA capacità di vincere una resistenza o di opporsi ad essa attraverso una contrazione muscolare POTENZA P = F
Misure di.. FORZA In FISICA prodotto di una massa per una F = m a accelerazione In FISIOLOGIA capacità di vincere una resistenza o di opporsi ad essa attraverso una contrazione muscolare POTENZA P = F
DEFINIZIONE. in generale NON è: completamente nota tempo-invariante. per un trasduttore è desiderabile una FdT lineare: U = K I
 DEFINIZIONE TRASDUTTORE = dispositivo che rileva una grandezza fisica (ingresso) e fornisce una grandezza elettrica (uscita) ad essa correlata temperatura, pressione, radiazione luminosa, posizione, velocità,...
DEFINIZIONE TRASDUTTORE = dispositivo che rileva una grandezza fisica (ingresso) e fornisce una grandezza elettrica (uscita) ad essa correlata temperatura, pressione, radiazione luminosa, posizione, velocità,...
Trasformatore di corrente (TA)
") Sensori di corrente Il modo più semplice di eseguire la misura di corrente è il metodo volt-amperometrico, in cui si misura la caduta di tensione su di una resistenza di misura percorsa dalla corrente
Sensori di corrente Il modo più semplice di eseguire la misura di corrente è il metodo volt-amperometrico, in cui si misura la caduta di tensione su di una resistenza di misura percorsa dalla corrente
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
Sensori di grandezze Fisiche e Meccaniche
 Sensori di grandezze Fisiche e Meccaniche FISICHE Pressione Portata Livello Temperatura MECCANICHE Posizione e spostamento Velocità e accelerazione Vibrazioni e suono/rumore (per approfondimenti) 1 Sensori
Sensori di grandezze Fisiche e Meccaniche FISICHE Pressione Portata Livello Temperatura MECCANICHE Posizione e spostamento Velocità e accelerazione Vibrazioni e suono/rumore (per approfondimenti) 1 Sensori
SENSORI e TRASDUTTORI. Corso di Sistemi Automatici
 SENSORI e TRASDUTTORI Sensore Si definisce sensore un elemento sensibile in grado di rilevare le variazioni di una grandezza fisica ( temperatura, umidità, pressione, posizione, luminosità, velocità di
SENSORI e TRASDUTTORI Sensore Si definisce sensore un elemento sensibile in grado di rilevare le variazioni di una grandezza fisica ( temperatura, umidità, pressione, posizione, luminosità, velocità di
Laboratorio di Fisica 3 Ottica 2. Studenti: Buoni - Giambastiani - Leidi Gruppo: G09
 Laboratorio di Fisica 3 Ottica 2 Studenti: Buoni - Giambastiani - Leidi Gruppo: G09 24 febbraio 2015 1 Lunghezza d onda di un laser He-Ne 1.1 Scopo dell esperienza Lo scopo dell esperienza è quello di
Laboratorio di Fisica 3 Ottica 2 Studenti: Buoni - Giambastiani - Leidi Gruppo: G09 24 febbraio 2015 1 Lunghezza d onda di un laser He-Ne 1.1 Scopo dell esperienza Lo scopo dell esperienza è quello di
Trasduttori di posizione e velocità.
 Trasduttori di posizione e velocità. Tra le innumerevoli categorie di trasduttori di posizione esistono gli encoder ottici digitali che si possono raggruppare in tre tipologie a seconda del segnale fornito
Trasduttori di posizione e velocità. Tra le innumerevoli categorie di trasduttori di posizione esistono gli encoder ottici digitali che si possono raggruppare in tre tipologie a seconda del segnale fornito
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
PROGETTO ESCAVATORE VIRTUALE
 PROGETTO ESCAVATORE VIRTUALE Facoltà di Ingegneria Industriale Corso di Laurea in Ingegneria Meccanica Anno Accademico 2011-2012 Matteo Condoleo 1 OBBIETTIVI Il presente progetto è stato realizzato per
PROGETTO ESCAVATORE VIRTUALE Facoltà di Ingegneria Industriale Corso di Laurea in Ingegneria Meccanica Anno Accademico 2011-2012 Matteo Condoleo 1 OBBIETTIVI Il presente progetto è stato realizzato per
Che cos è la barriera luminosa?
 BARRIERA LUMINOSA Che cos è la barriera luminosa? Pezzi da contare Diodo IR o Laser (emittente) Pezzi contati Direzione del nastro trasportatore FOTODIODO (ricevitore) Direzione del nastro trasportatore
BARRIERA LUMINOSA Che cos è la barriera luminosa? Pezzi da contare Diodo IR o Laser (emittente) Pezzi contati Direzione del nastro trasportatore FOTODIODO (ricevitore) Direzione del nastro trasportatore
Dipartimento di Fisica Programmazione classi seconde Anno scolastico2010-2011
 Liceo Tecnico Chimica Industriale Meccanica Elettrotecnica e Automazione Elettronica e Telecomunicazioni Istituto Tecnico Industriale Statale Alessandro Volta Via Assisana, 40/E - loc. Piscille - 06087
Liceo Tecnico Chimica Industriale Meccanica Elettrotecnica e Automazione Elettronica e Telecomunicazioni Istituto Tecnico Industriale Statale Alessandro Volta Via Assisana, 40/E - loc. Piscille - 06087
Lezione 16. Motori elettrici: introduzione
 Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Lezione 16. Motori elettrici: introduzione 1 0. Premessa Un azionamento è un sistema che trasforma potenza elettrica in potenza meccanica in modo controllato. Esso è costituito, nella sua forma usuale,
Spettrofotometria. Le onde luminose consistono in campi magnetici e campi elettrici oscillanti, fra loro perpendicolari.
 Spettrofotometria. Con questo termine si intende l utilizzo della luce nella misura delle concentrazioni chimiche. Per affrontare questo argomento dovremo conoscere: Natura e proprietà della luce. Cosa
Spettrofotometria. Con questo termine si intende l utilizzo della luce nella misura delle concentrazioni chimiche. Per affrontare questo argomento dovremo conoscere: Natura e proprietà della luce. Cosa
Corso di DISPOSITIVI E SISTEMI PER LE COMUNICAZIONI IN FIBRA OTTICA
 Università Mediterranea di Reggio Calabria - Facoltà di Ingegneria Corso di DISPOSITIVI E SISTEMI PER LE COMUNICAZIONI IN FIBRA OTTICA Prof. Ing. Riccardo Carotenuto Anno Accademico 2007/2008-1- SOMMARIO
Università Mediterranea di Reggio Calabria - Facoltà di Ingegneria Corso di DISPOSITIVI E SISTEMI PER LE COMUNICAZIONI IN FIBRA OTTICA Prof. Ing. Riccardo Carotenuto Anno Accademico 2007/2008-1- SOMMARIO
Sensori di posizione di tipo induttivo
 I sensori induttivi a singolo avvolgimento sono composti da un avvolgimento fisso e da un nucleo ferromagnetico mobile. Il sensore converte la grandezza da misurare in una variazione dell induttanza L
I sensori induttivi a singolo avvolgimento sono composti da un avvolgimento fisso e da un nucleo ferromagnetico mobile. Il sensore converte la grandezza da misurare in una variazione dell induttanza L
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Funzioni di base del rilevatore di difetti universale GEKKO
 GEKKO Descrizione Prodotto Rilevatore di difetti ad ultrasuoni portatile con tecnologia Phased Array, TOFD e tecniche di ispezione con Ultrasuoni convenzionali. Funzioni di base del rilevatore di difetti
GEKKO Descrizione Prodotto Rilevatore di difetti ad ultrasuoni portatile con tecnologia Phased Array, TOFD e tecniche di ispezione con Ultrasuoni convenzionali. Funzioni di base del rilevatore di difetti
MISURATORE DI LIVELLO IDRICO A BILANCIA
 I sistemi a bilancia dinamometrica di nostra produzione sono progettati per il rilievo, la registrazione e la trasmissione a distanza della misura del livello idrico di grandi bacini, con elevata precisione
I sistemi a bilancia dinamometrica di nostra produzione sono progettati per il rilievo, la registrazione e la trasmissione a distanza della misura del livello idrico di grandi bacini, con elevata precisione
Amplificatori Audio di Potenza
 Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Amplificatori Audio di Potenza Un amplificatore, semplificando al massimo, può essere visto come un oggetto in grado di aumentare il livello di un segnale. Ha quindi, generalmente, due porte: un ingresso
Circuito di pilotaggio ON OFF con operazionale
 PREMESSA Circuito di pilotaggio ON OFF con operazionale A cura del Prof. Marco Chirizzi www.marcochirizzi.it Si supponga di dovere progettare un circuito di pilotaggio ON OFF in grado di mantenere un fluido
PREMESSA Circuito di pilotaggio ON OFF con operazionale A cura del Prof. Marco Chirizzi www.marcochirizzi.it Si supponga di dovere progettare un circuito di pilotaggio ON OFF in grado di mantenere un fluido
LA CORRENTE ELETTRICA
 L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
L CORRENTE ELETTRIC H P h Prima che si raggiunga l equilibrio c è un intervallo di tempo dove il livello del fluido non è uguale. Il verso del movimento del fluido va dal vaso a livello maggiore () verso
Grandezze fisiche e loro misura
 Grandezze fisiche e loro misura Cos è la fisica? e di che cosa si occupa? - Scienza sperimentale che studia i fenomeni naturali suscettibili di sperimentazione e caratterizzati da entità o grandezze misurabili.
Grandezze fisiche e loro misura Cos è la fisica? e di che cosa si occupa? - Scienza sperimentale che studia i fenomeni naturali suscettibili di sperimentazione e caratterizzati da entità o grandezze misurabili.
In anticipo sul futuro. La tecnica termografica come strumento di verifica e diagnosi di malfunzionamenti
 La tecnica termografica come strumento di verifica e diagnosi di malfunzionamenti La tecnica termografica genesi e definizioni Termografia: definizioni e principio di misura Dal greco: Scrittura del calore
La tecnica termografica come strumento di verifica e diagnosi di malfunzionamenti La tecnica termografica genesi e definizioni Termografia: definizioni e principio di misura Dal greco: Scrittura del calore
la scienza della rappresentazione e della elaborazione dell informazione
 Sistema binario Sommario informatica rappresentare informazioni la differenza Analogico/Digitale i sistemi di numerazione posizionali il sistema binario Informatica Definizione la scienza della rappresentazione
Sistema binario Sommario informatica rappresentare informazioni la differenza Analogico/Digitale i sistemi di numerazione posizionali il sistema binario Informatica Definizione la scienza della rappresentazione
Istituto Tecnico dei Trasporti e Logistica Nautico San Giorgio Genova A/S 2012/2013 Programma Didattico Svolto Elettrotecnica ed Elettronica
 Docenti: Coppola Filippo Sergio Sacco Giuseppe Istituto Tecnico dei Trasporti e Logistica Nautico San Giorgio Genova A/S 2012/2013 Programma Didattico Svolto Classe 3A2 Elettrotecnica ed Elettronica Modulo
Docenti: Coppola Filippo Sergio Sacco Giuseppe Istituto Tecnico dei Trasporti e Logistica Nautico San Giorgio Genova A/S 2012/2013 Programma Didattico Svolto Classe 3A2 Elettrotecnica ed Elettronica Modulo
BROCHURE QUADRO ABE_1200 CON ANALIZZATORE FISSO ABE_1000. Istruzioni operative
 BROCHURE QUADRO ABE_1200 CON ANALIZZATORE FISSO ABE_1000 Istruzioni operative A.B.ENERGY S.r.l. Versione 001 www.abenergy.it Caratteristiche principali ABE_1000 analizzatore per Metano (CH4), Anidride
BROCHURE QUADRO ABE_1200 CON ANALIZZATORE FISSO ABE_1000 Istruzioni operative A.B.ENERGY S.r.l. Versione 001 www.abenergy.it Caratteristiche principali ABE_1000 analizzatore per Metano (CH4), Anidride
INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI E TRASFORMATORI
 INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI E TRASFORMATORI DL 1010B DL 1010D DL 1012Z KIT PER TRASFORMATORI E MOTORI KIT PER IL MONTAGGIO
INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI E TRASFORMATORI DL 1010B DL 1010D DL 1012Z KIT PER TRASFORMATORI E MOTORI KIT PER IL MONTAGGIO
La prove dinamiche sugli edifici II parte strumentazione e analisi dei segnali
 La prove dinamiche sugli edifici II parte strumentazione e analisi dei segnali Luca Facchini e-mail: [email protected] Introduzione Quali strumenti vengono utilizzati? Le grandezze di interesse nelle
La prove dinamiche sugli edifici II parte strumentazione e analisi dei segnali Luca Facchini e-mail: [email protected] Introduzione Quali strumenti vengono utilizzati? Le grandezze di interesse nelle
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte;
 Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
Libri di testo adottati: Macchine Elettriche, HOEPLI di Gaetano Conte; Obiettivi generali. Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte; Manuale di Elettrotecnica e Automazione, Hoepli;
I.P.S.I.A. Di BOCCHIGLIERO. ---- Fotoemettitori e Fotorivelatori ---- Materia: Telecomunicazioni. prof. Ing. Zumpano Luigi. Filippelli Maria Fortunata
 I..S.I.A. Di BOCCHIGLIERO a.s. 2010/2011 -classe III- Materia: Telecomunicazioni ---- Fotoemettitori e Fotorivelatori ---- alunna Filippelli Maria Fortunata prof. Ing. Zumpano Luigi Fotoemettitori e fotorivelatori
I..S.I.A. Di BOCCHIGLIERO a.s. 2010/2011 -classe III- Materia: Telecomunicazioni ---- Fotoemettitori e Fotorivelatori ---- alunna Filippelli Maria Fortunata prof. Ing. Zumpano Luigi Fotoemettitori e fotorivelatori
I.T.I. A. MALIGNANI UDINE CLASSI 3 e ELT MATERIA: ELETTROTECNICA PROGRAMMA PREVENTIVO
 CORRENTE CONTINUA: FENOMENI FISICI E PRINCIPI FONDAMENTALI - Richiami sulle unità di misura e sui sistemi di unità di misura. - Cenni sulla struttura e sulle proprietà elettriche della materia. - Le cariche
CORRENTE CONTINUA: FENOMENI FISICI E PRINCIPI FONDAMENTALI - Richiami sulle unità di misura e sui sistemi di unità di misura. - Cenni sulla struttura e sulle proprietà elettriche della materia. - Le cariche
Termodinamica: legge zero e temperatura
 Termodinamica: legge zero e temperatura Affrontiamo ora lo studio della termodinamica che prende in esame l analisi dell energia termica dei sistemi e di come tale energia possa essere scambiata, assorbita
Termodinamica: legge zero e temperatura Affrontiamo ora lo studio della termodinamica che prende in esame l analisi dell energia termica dei sistemi e di come tale energia possa essere scambiata, assorbita
Dispositivi optoelettronici (1)
") Dispositivi optoelettronici (1) Sono dispositivi dove giocano un ruolo fondamentale sia le correnti elettriche che i fotoni, le particelle base della radiazione elettromagnetica. Le onde elettromagnetiche
Dispositivi optoelettronici (1) Sono dispositivi dove giocano un ruolo fondamentale sia le correnti elettriche che i fotoni, le particelle base della radiazione elettromagnetica. Le onde elettromagnetiche
A intervalli regolari ogni router manda la sua tabella a tutti i vicini, e riceve quelle dei vicini.
 Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
Algoritmi di routing dinamici (pag.89) UdA2_L5 Nelle moderne reti si usano algoritmi dinamici, che si adattano automaticamente ai cambiamenti della rete. Questi algoritmi non sono eseguiti solo all'avvio
NOVITÀ SYSTEM RF ANTIFURTO RADIO MAGGIO ITALIANO
 NOVITÀ SYSTEM RF ANTIFURTO RADIO ITALIANO MAGGIO 2003 SICUREZZA SENZA FILI I DISPOSITIVI DI GESTIONE E CONTROLLO LE CENTRALI Il cuore del sistema è la centrale disponibile in due differenti modelli a 16
NOVITÀ SYSTEM RF ANTIFURTO RADIO ITALIANO MAGGIO 2003 SICUREZZA SENZA FILI I DISPOSITIVI DI GESTIONE E CONTROLLO LE CENTRALI Il cuore del sistema è la centrale disponibile in due differenti modelli a 16
SL 27-IM Sensore di livello piezoresistivo INSTALLAZIONE E MANUTENZIONE
 SL 27-IM Sensore di livello piezoresistivo INSTALLAZIONE E MANUTENZIONE DESCRIZIONE... 3 Generalità... 3 Principio di misura... 3 Tipologia del sensore... 3 INSTALLAZIONE... 4 Aerazione... 4 Montaggio
SL 27-IM Sensore di livello piezoresistivo INSTALLAZIONE E MANUTENZIONE DESCRIZIONE... 3 Generalità... 3 Principio di misura... 3 Tipologia del sensore... 3 INSTALLAZIONE... 4 Aerazione... 4 Montaggio
Induzione magnetica. Corrente indotta. Corrente indotta. Esempio. Definizione di flusso magnetico INDUZIONE MAGNETICA E ONDE ELETTROMAGNETICHE
 Induzione magnetica INDUZIONE MAGNETICA E ONDE ELETTROMAGNETICHE Che cos è l induzione magnetica? Si parla di induzione magnetica quando si misura una intensità di corrente diversa da zero che attraversa
Induzione magnetica INDUZIONE MAGNETICA E ONDE ELETTROMAGNETICHE Che cos è l induzione magnetica? Si parla di induzione magnetica quando si misura una intensità di corrente diversa da zero che attraversa
 OPTOELETTRONICA I FOTORILEVATORI fotoresistenze Le foto resistenze sono costituite da un materiale semiconduttore di tipo N,come il solfuro di cadmio(cds) oppure da materiali fotosensibili come l ossido
OPTOELETTRONICA I FOTORILEVATORI fotoresistenze Le foto resistenze sono costituite da un materiale semiconduttore di tipo N,come il solfuro di cadmio(cds) oppure da materiali fotosensibili come l ossido
Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte;
 Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte; Obiettivi generali. Macchine Elettriche, HOEPLI di Gaetano Conte; Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte;
Libri di testo adottati: Elettrotecnica generale HOEPLI di Gaetano Conte; Obiettivi generali. Macchine Elettriche, HOEPLI di Gaetano Conte; Laboratorio di Macchine Elettriche, HOEPLI di Gaetano Conte;