ROBOCUP JR ITALIA 2012
|
|
|
- Evangelista Pinna
- 8 anni fa
- Visualizzazioni
Transcript
1 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile Della squadra Another Brick Istituto ITIS Marconi di Gorgonzola

2 La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica regolata dal D.P.R. 275/99 (art. 7) che permette alle scuole statali di operare sinergicamente per obiettivi condivisi e ritenuti importanti per l offerta formativa erogata all utenza. La Rete di scuole è nata sulla condivisione di una serie di principi EDUCATIVI e DIDATTICI riferiti alla realtà della scuola italiana. Questi principi e le conseguenti proposte operative erano stati riportati in un documento del maggio 2008 dal titolo: Manifesto per una RoboCupJr italiana - una proposta per la diffusione dell utilizzo didattico della Robotica nelle scuole a cura di Andrea Bonarini, Augusto Chioccariello e Giovanni Marcianò. Maggio 2008 L obiettivo della Rete organizzare l edizione italiana della Robocup Jr concretizza una spinta al confronto e alla collaborazione tra Istituti scolastici, elementi che motivano docenti e studenti all impegno nell innovazione, sia didattica che tecnologica, affrontando i problemi che costituiscono uno standard internazionale dal 2000, quando la Robocup (manifestazione riservata alle Università di tutto il mondo) ha proposto le tre gare per la scuola: Dance Rescue Soccer. La Robocup Jr ITALIA è Una manifestazione nazionale fondata di tre punti forti: 1. una struttura che cura l organizzazione e gestisce gli aspetti di organizzazione, promozione, svolgimento ai diversi livelli, regionali e nazionali; 2. un contenuto condiviso, ovvero regolamenti, formule di gara, supporto formativo e informativo ai partecipanti; 3. una documentazione delle proposte didattiche e del lavoro degli studenti che coinvolgono l uso di kit o robot auto

3 costruiti per la partecipazione agli eventi organizzati dalla Rete. Questo volumetto appartiene alla collana di documentazione. Sul piano organizzativo e gestionale della Rete di scuole lo Statuto prevede organismi ben distinti ma fortemente integrati: COMITATO DI GESTIONE formato dai Dirigenti scolastici degli Istituti fondatori o associati alla Rete. Si riunisce due volte l anno in via ordinaria, e online per decisioni straordinarie. ISTITUTO CAPOFILA come previsto dal DPR 275/99 cura gli aspetti burocratici, amministrativi e contabili della Rete. Il Dirigente scolastico dell Istituto capofila è il legale rappresentante della Rete e provvede a dare esecuzione alle delibere del Comitato di Gestione. COMITATO TECNICO formato dai docenti referenti degli Istituti fondatori o associati alla Rete, provvede a definire il Bando e i Regolamenti di gara per la manifestazione annuale nazionale, trasmettendoli al Comitato di gestione che li deve approvare. COMITATO LOCALE - Cura l edizione annuale della manifestazione, ed è formato a cura del Istituto fondatore o associato a cui il Comitato di Gestione ha assegnato la cura dell evento. ISTITUTI PARTECIPANTI iscrivendosi alle gare, beneficiano del supporto della Rete ma non partecipano alle decisioni gestionali o tecniche. La partecipazione alla gara nazionale li rende idonei per aderire alla Rete. Diversamente serve il parere del Comitato Tecnico.

4 autori A. Leporini D. Cinquini R. Di Benedetto Another Brick PARTECIPA ALLA GARA DI Rescue Istituto Marconi Classe triennio ITIS e Liceo Tecnologico

5 CAP. 1 - DATI GENERALI Studenti Marcandalli Simone - IIIBE Leporini Andrea - IIIBE Pasina Francesco - IVAE Cinquini Daniele - IVBE

6 Di Benedetto Roberto - IIIBE Mora Andrea - IIIAE Docente Boccasile Alfredo, insegnante di sistemi elettrici e automatici nel corso Elettrotecnica ed Automazione

7 CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE L I.T.I.S. MARCONI è presente sul territorio di Gorgonzola dal Inizialmente erano presenti solo le specializzazioni di elettrotecnica e telecomunicazioni. Nell A.S. 1996/97 è stato attivato il Liceo Scientifico Tecnologico, infine nell A.S. 2003/04 è stato attivato il corso di specializzazione in Informatica Industriale. Nel 2008/09 viene attivata la prima esperienza di robotica che si conclude con la partecipazione alla prima RoboCup di Torino nella categoria Rescue, seguita l'anno scorso dalla partecipazione alla manifestazione di Catania. Quest'anno è iniziata la seconda fase del nostro progetto a lungo termine, che prevede la realizzazione di sensori progettati dagli studenti e lo studio approfondito di sensori prodotti da terze parti. L'obiettivo futuro è quello di trovare degli sponsor per poter sviluppare dei robot progettati interamente dagli studenti. Fermo restando l'obiettivo principale che è quello di fornire agli studenti uno spazio per vivere la scuola da protagonisti, facendo dello studio un momento di realizzazione personale e di condivisione con gli altri.

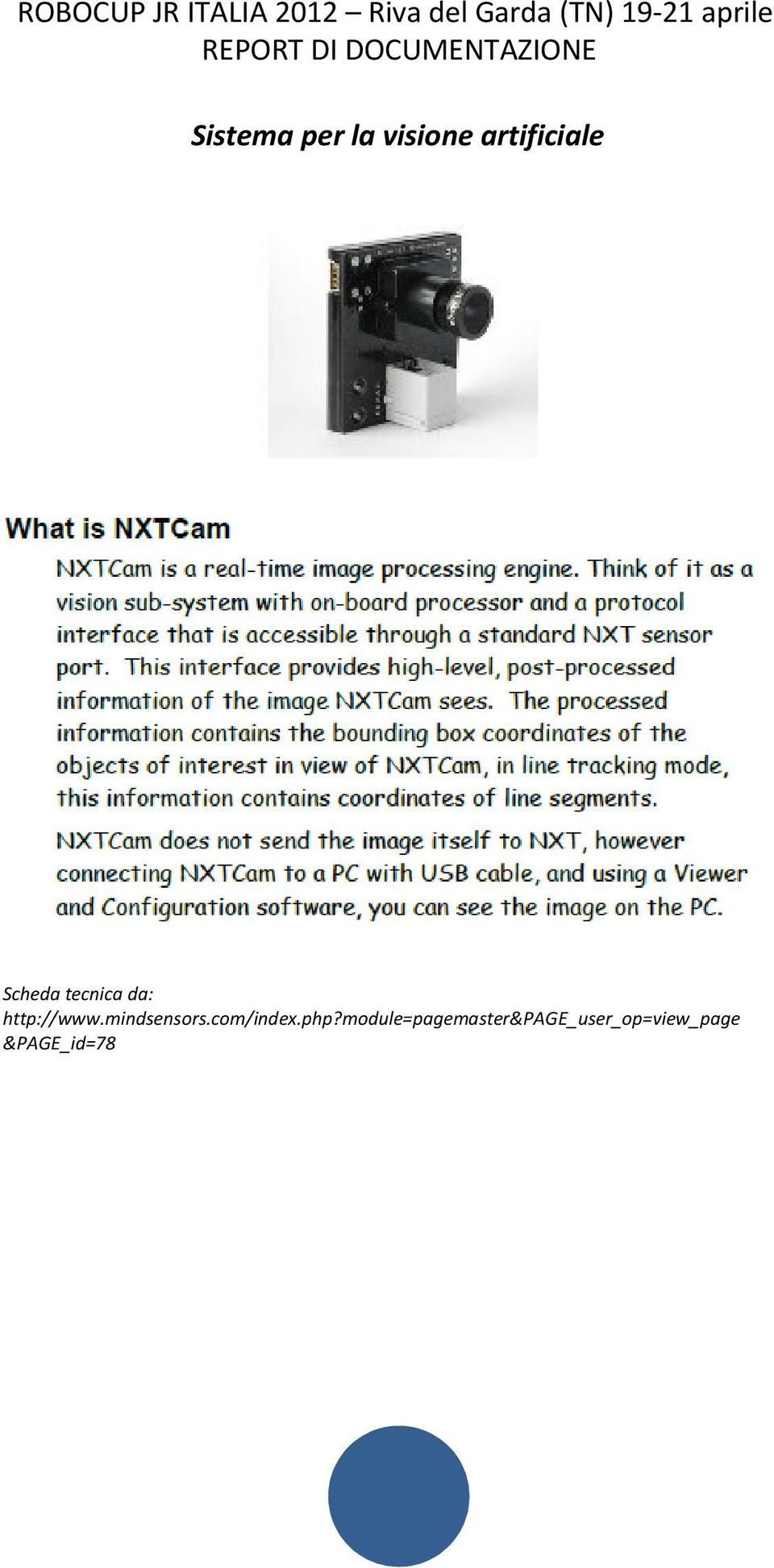
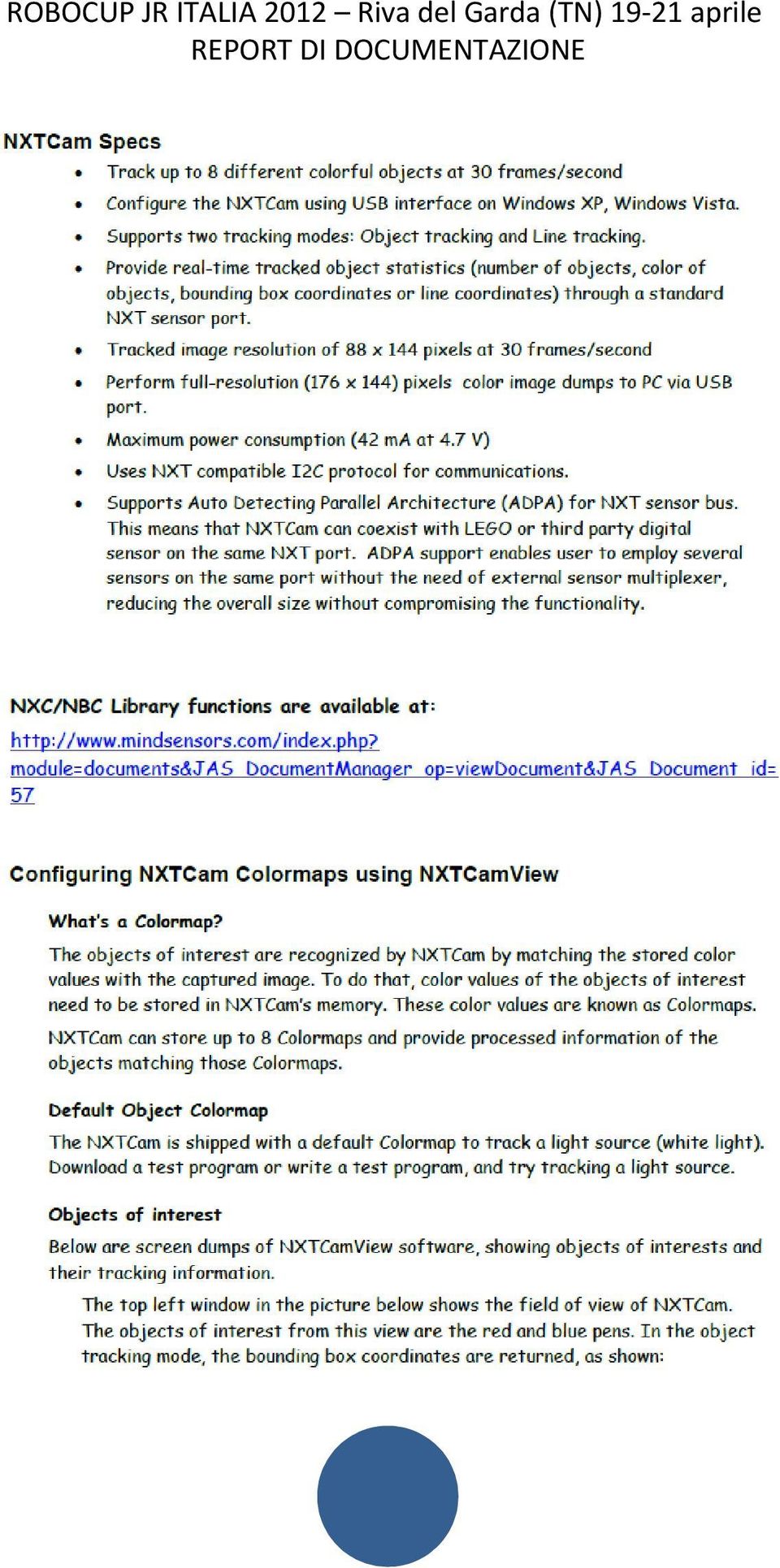
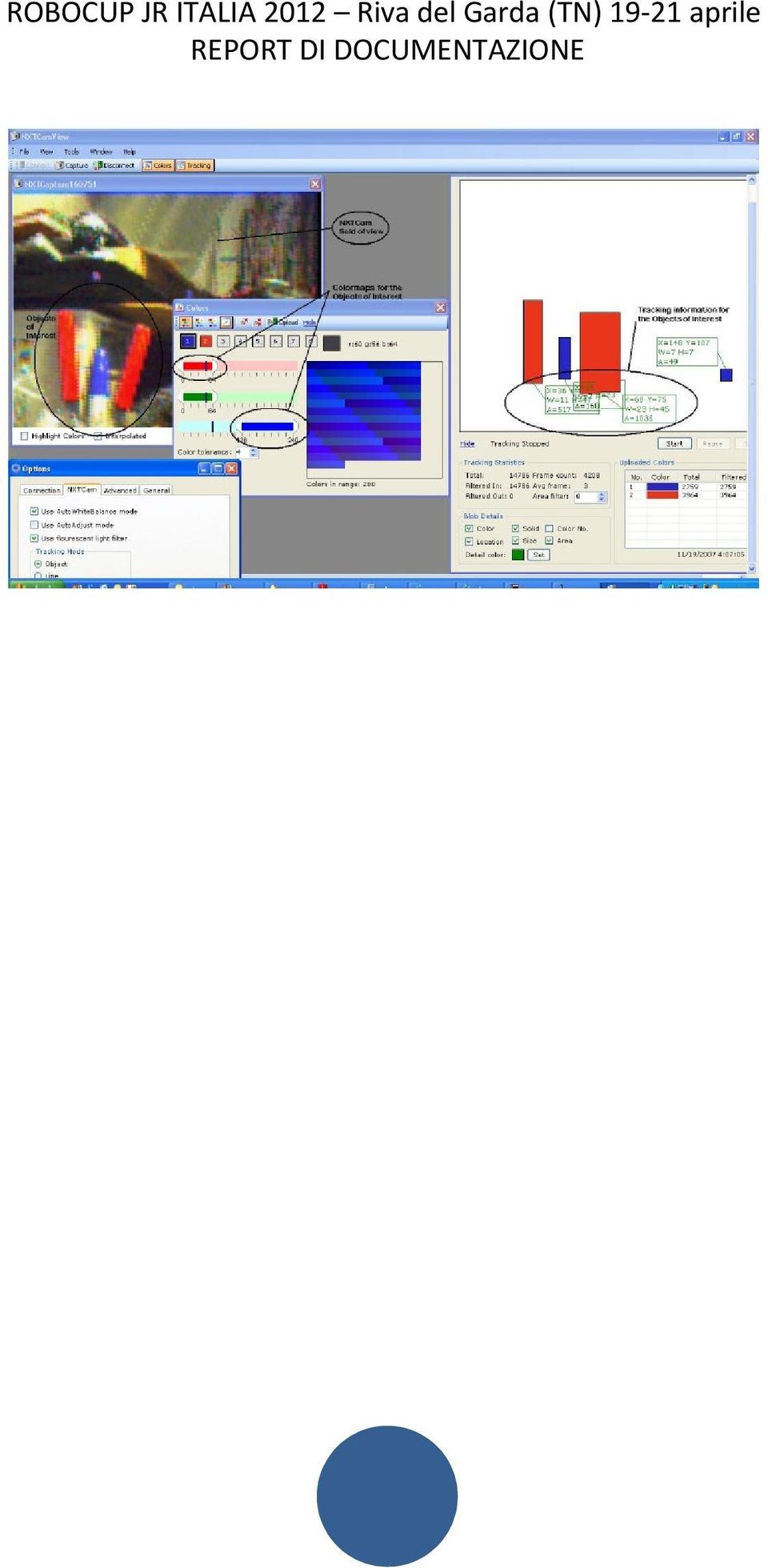
8 CAP. 3 NOME E STRUTTURA DEL ROBOT Il nome deriva da una famosa canzone dei Pink Floyd e dal fatto che l'unità centrale della Lego viene indicata in inglese come brick. Abbiamo utilizzato vari sensori e attuatori della LEGO: - Contatto - Luce - Colore - Motori - Ultrasuoni Questi sensori sono stati affiancati da alcuni sensori forniti da altri produttori: - Sensore a ultrasuoni SRF02 - Multiplexer - Sistema di visione artificiale V3 Ogni sensore è stato provato più volte e in diverse condizioni, al fine di valutarne il comportamento nelle nelle diverse condizioni di funzionamento. A questi si è aggiunto un sensore di contatto multiplo sviluppato dal nostro gruppo di robotica. Sono stati formati dei gruppi che si sono occupati delle seguenti attività: 1) analisi del sistema di visione V3 Mindsensor (descritto nel capitolo sei) sua programmazione, interfacciamento con LEGO Mindstorm ed utilizzo; 2) sviluppo hardware e software di un sistema di cinque sensori di contatto che, tramite un'unica linea di ingresso

9 analogica, fornisce informazioni sugli urti del robot con oggetti dell'ambiente. Si veda il capitolo 6 per i dettagli tecnici; 3) analisi dei protocolli di trasmissione seriale e in particolare dell'i2c e del Bluetooth. Il primo protocollo è di fondamentale importanza per i gruppi che si occupano dello sviluppo dei sensori, mentre la trasmissione Bluetooth è utilizzata per scambiare dati con il PC. Il gruppo ha sviluppato un'interfaccia grafica in C# per la visualizzazione delle variabili rilevanti durante la navigazione del robot. Il sistema sviluppato serve esclusivamente per il monitoraggio del sistema, visto che in gara non è permessa la comunicazione del robot con il PC; 4) multiplexer per la gestione dei due motori della pinza che serve per portare la vittime nel luogo sicuro; 5) realizzazione meccanica, utilizzando principalmente i contributi disponibili in internet, e il testo manuale del costruttore di robot.

10 CAP. 4 MECCANICA Inizialmente vengono progettate diverse strutture utilizzando i pezzi Technic della LEGO. Queste strutture vengono conservate come muletti per la gara finale. Nel corso della gara dello scorso anno abbiamo visto che, pur mancando in alcuni casi di robustezza, il modelli costruiti con pezzi LEGO hanno il grande vantaggio di essere facilmente modificabili in base alle difficoltà del percorso di gara. Il robot è composto da due motori in posizione orizzontale che fanno muovere i cingoli sostenuti da tre cerchioni, saldamente staffati. Abbiamo deciso di utilizzare i cingoli per migliorare l'aderenza del robot in presenza di ostacoli e detriti. La struttura portante (rappresentata nelle foto) ci ha permesso di installare il sensore di contatto, i due sensori di luminosità e la CAM (sovrastata da una torcia a LED emittente luce blu per permettere la visione della vittima).

11 Alla destra del mattoncino intelligente è posta la pinza per il salvataggio composta da due motori di cui uno mobile che si muove come un avambraccio. Alla sinistra è posto il multiplexer per aumentare le porte di uscita utilizzabili. Ai lati della camera sono poste due staffe con all estremità due sensori di contatto (oltre a quello posto dentro la pinza).

12 CAP. 5 UNITÀ DI CONTROLLO ll kit utilizzato è il LEGO NXT, di cui si riporta uno schema a blocchi dell'unità centrale: Processore principale: Atmel 32-bit ARM processor, AT91SAM7S KB FLASH 64 KB RAM 48 MHz Co-processore: Atmel 8-bit AVR processor, ATmega48 4 KB FLASH 512 Byte RAM 8 Mhz


13 Caratteristice dei motori LEGO Encoder integrato nel motore con sensibilità 1 Posizioni relative e non assolute Velocità massima pari a circa 200 RPM Coppia massima 24 Ncm Motori estremamente robusti Connessioni di Input/Output Per la programmazione è stato utilizzato l'ambiente di sviluppo BricXcc e il linguaggio NCX. Il collegamento al robot, per l'aggiornamento dei programmi, avviene tramite porta USB. Il firmware installato sul robot è quello potenziato prodotto dal progetto BricXcc, versione I driver di comunicazione sono i Fantom driver forniti da LEGO.

14 CAP. 6 SENSORI Nel corso dell'anno scolastico abbiamo sviluppato una scheda per acquisire i dati provenienti da cinque sensori di contatto e trasmetterli all'unità centrale utilizzando una sola porta di ingresso. Abbiamo acquistato alcuni dispositivi Mindsensor e abbiamo studiato il loro funzionamento e li abbiamo utilizzati nelle fasi di test, anche se non tutti verranno utilizzati nel corso delle gare. Chiaramente abbiamo anche lavorato e acquisito esperienza con i sensori forniti dalla LEGO. Nelle pagine seguenti i dettagli sui dispositivi utilizzati.


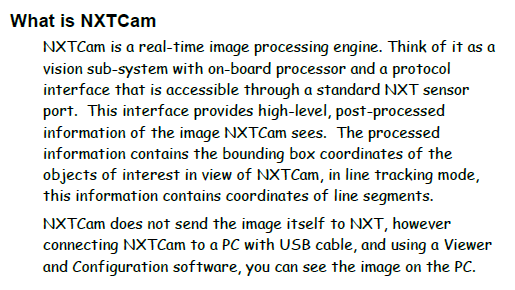
15 Sistema per la visione artificiale Scheda tecnica da: &PAGE_id=78

16
17
18 Sensori di contatto Questo sensore, in grado di rilevare fino a cinque contatti tramite un'unica porta analogica, è stato progettato e costruito secondo lo schema elettrico seguente: Abbiamo montato una breadboard secondo lo schema elettrico precedente e abbiamo eseguito la maggioranza dei test su di essa:

19 Resistenze R0 R1 R2 R3 R4 R5 Valore (KΩ)

20 Dopo le prove iniziali, per poter scrivere il programma di gestione, abbiamo completato la tabella riportata di seguito, con le varie possibilità di uso dei cinque contatti: tasto Tasto x 3 x Tasto 2 Tasto 3 x x x x 4 x x 5 x x Tasto 4 Tasto 5 x x x x Le combinazioni di contatti che non possono essere usate o che posso essere scambiate sono le seguenti: Tasti 1/4 premuti(possibilità di sostituzione con Tasto 1 premuto) Tasti 1/5 premuti(possibilità di sostituzione con Tasti 2/3 premuti) Tasti 2/4 premuti(possibilità di sostituzione con Tasto 1 premuto) Tasti 4/5 premuti(possibilità di sostituzione con Tasto 4 premuto) Tasti 1/2/3/4 premuti(possibilità di sostituzione con Tasti 2/5 premuti) Con l aiuto degli studenti e dei professori del laboratorio di telecomunicazioni è stata costruita la basetta definitiva che verrà utilizzata anche nella gara:
 Tasti 1/2/3/4 premuti(possibilità di sostituzione con Tasti 2/5 premuti) Con l aiuto degli studenti e dei professori del laboratorio di telecomunicazioni è stata")
21 Infine i sensori di contatto sono stati saldati a cavi di 50 cm e isolati. Per l alimentazione si utilizza quella dell unità centrale NXT.
22 Scheda tecnica da: cpath=15_50&products_id=249
23 Software di gestione dell'input:


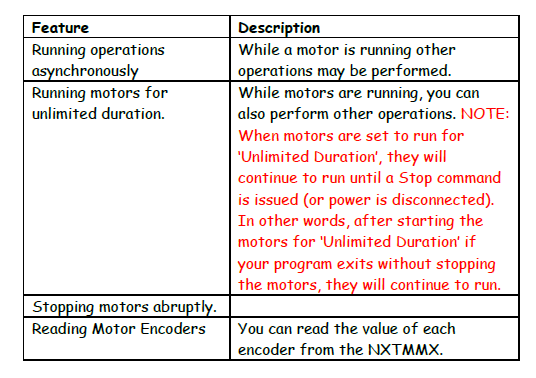
24 Multiplexer L'Nxtmmx-v2 è un multiplexer che si collega ad una delle 4 porte di input. In questo modo si hanno a disposizione 2 ulteriori porte per i motori, restando libera una connessione di ingresso per un sensore digitale. Per funzionare ha bisogno di un alimentazione compresa tra i 7 e i 9 volt, alimentazione fornita da una batteria esterna. E' stato utilizzato per collegare i due motori della pinza che ci permette di afferrare la vittima. Caratteristiche tecniche
25

26 Librerie The library file from following URL, and at the top of your NXC program file, include it with following directive: #include "NXTMMX-lib.nxc" Library file URL: module=documents&jas_documentmanager_op=viewdocument&jas _Document_id=154
27 CAP. 7 ATTUATORI MOTORI LEGO Encoder integrato nel motore con sensibilità 1 Posizioni relative e non assolute Velocità massima pari a circa 200 RPM Coppia massima 24 Ncm Motori estremamente robusti Pinza Di seguito viene riportata una foto della pinza utilizzata nell'ultima stanza.
28 CAP. 8 AMBIENTE DI SVILUPPO L'ambiente di sviluppo utilizzato è BricXcc, progetto open sourse arrivato alle release (da noi utilizzata). Il firmware caricato sui robot è quello potenziato, release Il linguaggio utilizzato è l'nxc. La scelta è stata dettata dal fatto che il software è open source, il linguaggio è di fatto un C, linguaggio molto utilizzato anche dagli studenti delle nostra scuola che non si occupano di robotica. Infine, in internet è presente parecchio materiale e la compatibilità con i sensori prodotti da terze parti è molto buona. E' stato utilizzato anche Microsoft C# Express Edition, per visualizzare in tempo reale i dati rilevati dai sensori, chiaramente solo in fase di test e non durante la competizione.
29 CAP. 9 IL PROGRAMMA SOFTWARE I diversi componenti del gruppo hanno affrontato indipendentemente le diverse problematiche relative alla gestione del robot, dal settaggio iniziale, al movimento, alla rilevazione della vittima. Ogni compito è stato implementato tramite una diversa funzione. Di seguito riportiamo qualche esempio di programmazione. Settaggio sensori ed il check Un programma ci permette di tarare i sensori di luminosità in modo che riconoscano i diversi colori previsti (fondo, ostacoli, vittima e traccia). Viene rilevata per tre volte la luce riflessa dai diversi elementi presenti sul piano e infine viene calcolata la media ed assegnato il risultato alla variabili globali. E' stato predisposto anche un programma per il controllo del corretto settaggio e collegamento dei sensori prima della partenza della gara. task check() { SetSensorTouch(contatto); SetSensorLowspeed(USavanti); ButtonCount(BTNCENTER,true); while(buttoncount(btncenter,true)<1) { TextOut(10,LCD_LINE1,"TEST MOTORE DESTRA",true); TextOut(10,LCD_LINE2,"PORTA A",false); OnFwd(OUT_A,50); } Off(OUT_A); while(buttoncount(btncenter,true)<1) { TextOut(10,LCD_LINE1,"TEST MOTORE SINISTRA",true); TextOut(10,LCD_LINE2,"PORTA B",false); OnFwd(OUT_B,50); } Off(OUT_B); while(buttoncount(btncenter,true)<1) {
30 TextOut(10,LCD_LINE1,"TEST MULTIPLEXER",true); TextOut(10,LCD_LINE2,"PORTA S1",false); //ChiudiPinza(); //non sono sicuro del nome } while(buttoncount(btncenter,true)<1) { SetSensorLight(luceDestra); TextOut(10,LCD_LINE1,"TEST SENSORE LUCE DESTRA",true); TextOut(10,LCD_LINE2,"PORTA S2",false); NumOut(20,LCD_LINE3,Sensor(luceDestra),false); } while(buttoncount(btncenter,true)<1) { SetSensorLight(luceSinistra); TextOut(10,LCD_LINE1,"TEST LUCE SINISTRA",true); TextOut(10,LCD_LINE2,"PORTA S3",false); NumOut(20,LCD_LINE3,Sensor(luceSinistra),false); } while(buttoncount(btncenter,true)<1) { TextOut(10,LCD_LINE1,"TEST SENSORE ULTRASUONI",true); TextOut(10,LCD_LINE2,"PORTA S4",false); NumOut(20,LCD_LINE3,USavanti,false); } while(buttoncount(btncenter,true)<1) { TextOut(10,LCD_LINE1,"TEST SENSORE CONTATTO ",true); TextOut(10,LCD_LINE2,"Tasto T1",false); SensorMC(); NumOut(10,LCD_LINE2,t1,true); NumOut(10,LCD_LINE2,t2,true); NumOut(10,LCD_LINE2,t3,true); NumOut(10,LCD_LINE2,t4,true); NumOut(10,LCD_LINE2,t5,true); //programma dibbe valori } }
31 I contributi dei diversi componenti della squadra sono stati salvati in diversi file caricati tramite include: //AREA INCLUDE #include "include\bt\protocol.h" //gestione CAM #include "\include\nxtcam_v3p0\nxtcamlib-default.h" #include "include\cinquini8_4_12.h" //gestione movimento in stanza 1 e 2 #include "include\leporini30_3_12.h" //#include "include\demarco10_4_11.h" #include "include\trasmettipc8_4_12.h" // inserire con Mora - Goi le funzioni del multiplexer #include "include\multiplexer\nxtmmx-lib.h" #include "include\mora_goi_2_4_12.h" // gestione sensore di contatto multiplo #include "include\dibenedetto8_4_12.h" //Gestione sensori per lettura da I2C #include "include\sensori_8_4_12.h" Il task principale richiama, a seconda delle situazioni,le funzioni opportune: task main() { stanza=0; arrivato=0; risultato_movimento=0; largavittima=2; rapportoruota=20; delta=2; cargento=33; SetSensorLight(luceDestra); SetSensorLight(luceSinistra);
32 CustomSensorActiveStatus(contatto); SetSensorMode(contatto,SENSOR_MODE_RAW); SetSensorType(contatto,SENSOR_TYPE_CUSTOM); SensorMC(); ResetAllTachoCounts(OUT_AB); start sensori; //start ricevi_trasmetti; while (arrivato==0) { if (ButtonPressed(BTNCENTER,true)) gestioneemmergenza(); // programma da eseguire in caso di intervento del capitano switch (stanza) { case 0: // settaggio(); stanza=1; break; case 1: if (risultato_movimento==0) risultato_movimento=muovi1(); NumOut(10,LCD_LINE3, risultato_movimento,true); break; case 2: ultima_stanza(); break; } } } Il task ricevi_trasmetti permette l'invio delle informazioni principali al PC, solo in fase di test. task ricevi_trasmetti() { string trasmetti; int lunghezza; long tempo=0; // -- check the bluetooth connection (we need to behave as a "master"): // -- if no "master" connection is there, then it will complain and exit slavecheck(); // configurato con PC come Master while (true) // ordine di invio: tempo # bottone # x # y # { // trovare il separatore "#" per dividere i valori alla ricezione tempo = CurrentTick()-FirstTick() ;
33 trasmetti = NumToStr(tempo) + "#" + NumToStr(d) + "#" + NumToStr(s); trasmetti= trasmetti+ "#" + NumToStr(distanza) ; trasmetti= trasmetti+ "#" + NumToStr(xG) + "#" + NumToStr(yG); trasmetti= trasmetti+ "#" + NumToStr(xGl) + "#" + NumToStr(yGt); trasmetti= trasmetti+ "#" + NumToStr(xGr) + "#" + NumToStr(yGb); TextOut(3,LCD_LINE3,trasmetti,false); sendtomaster(trasmetti); } } Le due funzioni seguenti gestiscono i motori della pinza, tramite il multiplexer. const byte Addr = 0x06; void ChiudiPinza() { int v; long tach; MMX_Init( SensorPort, Addr, 0 ); while(true) { MMX_Run_Degrees(SensorPort,Addr,MMX_Motor_2,MMX_Direction_For ward,70,120,mmx_completion_wait_for,mmx_next_action_brake); MMX_Run_Unlimited(SensorPort,Addr,MMX_Motor_2,MMX_Direction_Re verse,70); Wait(5000); MMX_Stop(SensorPort,Addr,MMX_Motor_2,MMX_Next_Action_Brake); MMX_Run_Degrees(SensorPort,Addr,MMX_Motor_1,MMX_Direction_For ward,70,80,mmx_completion_wait_for,mmx_next_action_brake); MMX_Run_Unlimited(SensorPort,Addr,MMX_Motor_1,MMX_Direction_For ward,70); Wait(5000); } } void ApriPinza() { int v; long tach; MMX_Init( SensorPort, Addr, 0 ); while(true)
34 { MMX_Run_Degrees(SensorPort,Addr,MMX_Motor_1,MMX_Direction_Rev erse,70,60,mmx_completion_wait_for,mmx_next_action_brake); MMX_Stop(SensorPort,Addr,MMX_Motor_1,MMX_Next_Action_Brake); MMX_Run_Degrees(SensorPort,Addr,MMX_Motor_2,MMX_Direction_Rev erse,70,45,mmx_completion_wait_for,mmx_next_action_brake); MMX_Run_Unlimited(SensorPort,Addr,MMX_Motor_2,MMX_Direction_Re verse,70); Wait(3000); } } Monitoraggio su PC dei dati acquisiti dai sensori Il programma è stato elaborato nel linguaggio Visual C# e permette la comunicazione tramite bluetooth tra il PC e il brick Lego Mindstorm NXT. Il programma si divide principalmente in sei Forms di cui uno di nome Controllo il quale contiene gli altri cinque Forms che sono: Connessione, Grafico Luce Destra, Grafico Luce Sinistra, Mappa e WebCam. Connessione Il Form Connessione si divide in due parti: una parte per la gestione della connessione e una seconda parte per la gestione dei dati. Il form serve per collegarsi, via Bluetooth, al brick Lego Mindstorm NXT e per ricevere i dati rilevati dai sensori dell NXT. I dati saranno inseriti all interno della tabella per esser visualizzati dall utente. Il Form Controllo con il Form Connessione attivo.
35 Grafico Luce Destra e Grafico Luce Sinistra Entrambi i form hanno la stessa funzione, cioè quella di visualizzare in un grafico cartesiano i valori rilevati dei due sensori di luce del Lego Mindstorm NXT nel corso del tempo. I Forms Luce Destra e Luce Sinistra mentre rappresentano i valori dei sensori (asse Y) nel corso del tempo (asse X).
36 Video Camera il Form Cam svolge la funzione di rappresentare, mediante dei rettangoli, l oggetto rilevato in tempo reale dalla CAM. Il Form Cam mentre rappresenta un oggetto blu visto dalla webcam del Lego Mindstorm NXT.
37 CAP. 10 SORGENTE DI ALIMENTAZIONE Il mattoncino intelligente della LEGO utilizza una fonte di alimentazione a 9 V. Noi abbiamo utilizzato le batterie al litio della Lego. Inoltre abbiamo utilizzato per il multiplexer una sorgente batteria esterna a 9 V e per la torcia 4 batterie da 1,5 V.
38 INDICE CAP. 1 - DATI GENERALI CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE CAP. 3 NOME E STRUTTURA DEL ROBOT CAP. 4 MECCANICA CAP. 5 UNITÀ DI CONTROLLO CAP. 6 SENSORI - S ISTEMA PER LA VISIONE ARTIFICIALE - S ENSORI DI CONTATTO - M ULTIPLEXER CAP. 7 ATTUATORI CAP. 8 AMBIENTE DI SVILUPPO CAP. 9 IL PROGRAMMA SOFTWARE PAG. 5 PAG. 7 PAG. 8 PAG. 10 PAG. 12 PAG. 14 PAG. 15 PAG. 18 PAG. 24 PAG. 27 PAG. 28 PAG. 29
ROBOCUP JR ITALIA 2015
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Rete di scuole per la
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
MANUALE MOODLE STUDENTI. Accesso al Materiale Didattico
 MANUALE MOODLE STUDENTI Accesso al Materiale Didattico 1 INDICE 1. INTRODUZIONE ALLA PIATTAFORMA MOODLE... 3 1.1. Corso Moodle... 4 2. ACCESSO ALLA PIATTAFORMA... 7 2.1. Accesso diretto alla piattaforma...
MANUALE MOODLE STUDENTI Accesso al Materiale Didattico 1 INDICE 1. INTRODUZIONE ALLA PIATTAFORMA MOODLE... 3 1.1. Corso Moodle... 4 2. ACCESSO ALLA PIATTAFORMA... 7 2.1. Accesso diretto alla piattaforma...
Uff. I. - OLIMPIADI DI PROBLEM SOLVING - Informatica e pensiero algoritmico nella scuola dell'obbligo
 Uff. I - OLIMPIADI DI PROBLEM SOLVING - Informatica e pensiero algoritmico nella scuola dell'obbligo Il Ministero dell Istruzione, dell Università e della Ricerca Direzione Generale per gli Ordinamenti
Uff. I - OLIMPIADI DI PROBLEM SOLVING - Informatica e pensiero algoritmico nella scuola dell'obbligo Il Ministero dell Istruzione, dell Università e della Ricerca Direzione Generale per gli Ordinamenti
- OLIMPIADI DI PROBLEM SOLVING - Informatica e pensiero algoritmico nella scuola dell'obbligo
 Ministero dell Istruzione, dell Università e della Ricerca Dipartimento per il sistema educativo di istruzione e formazione Direzione generale per gli ordinamenti scolastici e la valutazione del sistema
Ministero dell Istruzione, dell Università e della Ricerca Dipartimento per il sistema educativo di istruzione e formazione Direzione generale per gli ordinamenti scolastici e la valutazione del sistema
Guida Compilazione Piani di Studio on-line
 Guida Compilazione Piani di Studio on-line SIA (Sistemi Informativi d Ateneo) Visualizzazione e presentazione piani di studio ordinamento 509 e 270 Università della Calabria (Unità organizzativa complessa-
Guida Compilazione Piani di Studio on-line SIA (Sistemi Informativi d Ateneo) Visualizzazione e presentazione piani di studio ordinamento 509 e 270 Università della Calabria (Unità organizzativa complessa-
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
ACCORDO DI RETE RETE NAZIONALE SCUOLE ITALIA ORIENTA. con protocollo 0004232 che riconoscono alla scuola
 ACCORDO DI RETE RETE NAZIONALE SCUOLE ITALIA ORIENTA Visto il D.P.R. n. 275/1999, art. 7, che prevede la possibilità per le istituzioni Scolastiche autonome di stipulare accordi di rete per perseguire
ACCORDO DI RETE RETE NAZIONALE SCUOLE ITALIA ORIENTA Visto il D.P.R. n. 275/1999, art. 7, che prevede la possibilità per le istituzioni Scolastiche autonome di stipulare accordi di rete per perseguire
REALIZZAZIONE DI UN LABORATORIO REMOTO PER ESPERIENZE DI ROBOTICA EDUCATIVA: LATO CLIENT
 TESI DI LAUREA REALIZZAZIONE DI UN LABORATORIO REMOTO PER ESPERIENZE DI ROBOTICA EDUCATIVA: LATO CLIENT RELATORE: Prof. Michele Moro LAUREANDO: Marco Beggio Corso di laurea Specialistica in Ingegneria
TESI DI LAUREA REALIZZAZIONE DI UN LABORATORIO REMOTO PER ESPERIENZE DI ROBOTICA EDUCATIVA: LATO CLIENT RELATORE: Prof. Michele Moro LAUREANDO: Marco Beggio Corso di laurea Specialistica in Ingegneria
IRSplit. Istruzioni d uso 07/10-01 PC
 3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
Registratori di Cassa
 modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
Consiglio regionale della Toscana. Regole per il corretto funzionamento della posta elettronica
 Consiglio regionale della Toscana Regole per il corretto funzionamento della posta elettronica A cura dell Ufficio Informatica Maggio 2006 Indice 1. Regole di utilizzo della posta elettronica... 3 2. Controllo
Consiglio regionale della Toscana Regole per il corretto funzionamento della posta elettronica A cura dell Ufficio Informatica Maggio 2006 Indice 1. Regole di utilizzo della posta elettronica... 3 2. Controllo
Guida alla registrazione on-line di un DataLogger
 NovaProject s.r.l. Guida alla registrazione on-line di un DataLogger Revisione 3.0 3/08/2010 Partita IVA / Codice Fiscale: 03034090542 pag. 1 di 17 Contenuti Il presente documento è una guida all accesso
NovaProject s.r.l. Guida alla registrazione on-line di un DataLogger Revisione 3.0 3/08/2010 Partita IVA / Codice Fiscale: 03034090542 pag. 1 di 17 Contenuti Il presente documento è una guida all accesso
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
SCHEDA DI PROGETTO (Proposta)
") SCHEDA DI PROGETTO (Proposta) 1. Natura del Progetto 1.1. Titolo: Video-conferenza robotizzata. 1.2. Finalità: Gestione automatizzata, tramite robot, di una videocamera. 1.3. Descrizione: Realizzare su
SCHEDA DI PROGETTO (Proposta) 1. Natura del Progetto 1.1. Titolo: Video-conferenza robotizzata. 1.2. Finalità: Gestione automatizzata, tramite robot, di una videocamera. 1.3. Descrizione: Realizzare su
Programmatore scenari
 Programmatore scenari scheda tecnica ART. MH00 Descrizione Questo dispositivo permette la gestione di scenari semplici e evoluti fino ad un numero massimo di 300. Grazie al programmatore scenari il sistema
Programmatore scenari scheda tecnica ART. MH00 Descrizione Questo dispositivo permette la gestione di scenari semplici e evoluti fino ad un numero massimo di 300. Grazie al programmatore scenari il sistema
Excel. A cura di Luigi Labonia. e-mail: luigi.lab@libero.it
 Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
Excel A cura di Luigi Labonia e-mail: luigi.lab@libero.it Introduzione Un foglio elettronico è un applicazione comunemente usata per bilanci, previsioni ed altri compiti tipici del campo amministrativo
ROBOTICA A SCUOLA PROGETTI DI INNOVAZIONE DIDATTICA E DI ORIENTAMENTO IN ENTRATA E IN USCITA Edizione 2012-2013
 ROBOTICA A SCUOLA PROGETTI DI INNOVAZIONE DIDATTICA E DI ORIENTAMENTO IN ENTRATA E IN USCITA Edizione 2012-2013 Ente proponente: Provincia di Torino Assessorato Istruzione - Servizio Istruzione e Orientamento
ROBOTICA A SCUOLA PROGETTI DI INNOVAZIONE DIDATTICA E DI ORIENTAMENTO IN ENTRATA E IN USCITA Edizione 2012-2013 Ente proponente: Provincia di Torino Assessorato Istruzione - Servizio Istruzione e Orientamento
GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012
 GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012 L unità di Milano Città Studi del Centro matematita propone anche per l a.s. 2011-2012 una serie di problemi pensati per
GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012 L unità di Milano Città Studi del Centro matematita propone anche per l a.s. 2011-2012 una serie di problemi pensati per
Funzioni in C. Violetta Lonati
 Università degli studi di Milano Dipartimento di Scienze dell Informazione Laboratorio di algoritmi e strutture dati Corso di laurea in Informatica Funzioni - in breve: Funzioni Definizione di funzioni
Università degli studi di Milano Dipartimento di Scienze dell Informazione Laboratorio di algoritmi e strutture dati Corso di laurea in Informatica Funzioni - in breve: Funzioni Definizione di funzioni
ACCESSO AL SISTEMA HELIOS...
 Manuale Utente (Gestione Formazione) Versione 2.0.2 SOMMARIO 1. PREMESSA... 3 2. ACCESSO AL SISTEMA HELIOS... 4 2.1. Pagina Iniziale... 6 3. CARICAMENTO ORE FORMAZIONE GENERALE... 9 3.1. RECUPERO MODELLO
Manuale Utente (Gestione Formazione) Versione 2.0.2 SOMMARIO 1. PREMESSA... 3 2. ACCESSO AL SISTEMA HELIOS... 4 2.1. Pagina Iniziale... 6 3. CARICAMENTO ORE FORMAZIONE GENERALE... 9 3.1. RECUPERO MODELLO
Giornale di Cassa e regolarizzazione dei sospesi
 Servizi di sviluppo e gestione del Sistema Informativo del Ministero dell Istruzione dell Università e della Ricerca Giornale di Cassa e regolarizzazione dei sospesi Guida Operativa Versione 1.0 del RTI
Servizi di sviluppo e gestione del Sistema Informativo del Ministero dell Istruzione dell Università e della Ricerca Giornale di Cassa e regolarizzazione dei sospesi Guida Operativa Versione 1.0 del RTI
Software Gestionale Politiche Giovanili
 Software Gestionale Politiche Giovanili Guida all Uso Progettisti e Referenti tecnico-organizzativi Edizione 2012 1 INDICE DEI CONTENUTI: 1. NOZIONI GENERALI E ACCESSO AL SISTEMA 1.1 Requisiti di sistema...
Software Gestionale Politiche Giovanili Guida all Uso Progettisti e Referenti tecnico-organizzativi Edizione 2012 1 INDICE DEI CONTENUTI: 1. NOZIONI GENERALI E ACCESSO AL SISTEMA 1.1 Requisiti di sistema...
Facilitare, per quanto possibile, i contatti fra lo studente e la scuola italiana.
 Liceo Scientifico Statale Piero Gobetti di Torino Mobilità degli Studenti - Regolamento d Istituto a.s. 2015/16 Il documento presente si rivolge ai Genitori, agli Studenti e ai Docenti e costituisce norma,
Liceo Scientifico Statale Piero Gobetti di Torino Mobilità degli Studenti - Regolamento d Istituto a.s. 2015/16 Il documento presente si rivolge ai Genitori, agli Studenti e ai Docenti e costituisce norma,
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
ANNO SCOLASTICO 2014-2015
 ATTIVITÀ DI SPERIMENTAZIONE IN CLASSE PREVISTA NELL AMBITO DEL PROGETTO M2014 PROMOSSO DALL ACCADEMIA DEI LINCEI PER LE SCUOLE PRIMARIE E SECONDARIE DI I GRADO ANNO SCOLASTICO 2014-2015 Il Centro matematita,
ATTIVITÀ DI SPERIMENTAZIONE IN CLASSE PREVISTA NELL AMBITO DEL PROGETTO M2014 PROMOSSO DALL ACCADEMIA DEI LINCEI PER LE SCUOLE PRIMARIE E SECONDARIE DI I GRADO ANNO SCOLASTICO 2014-2015 Il Centro matematita,
MODULO PER LA GESTIONE DEI RESI
 MODULO PER LA GESTIONE DEI RESI Clienti, prodotti, categorie merceologiche e stabilimenti di produzione. Difetti, tipologia difetti, test ed esiti finali di verifica. Raggruppamento dei test loro in schede
MODULO PER LA GESTIONE DEI RESI Clienti, prodotti, categorie merceologiche e stabilimenti di produzione. Difetti, tipologia difetti, test ed esiti finali di verifica. Raggruppamento dei test loro in schede
DESTINATARI: ALUNNI DEL TRIENNIO E LE LORO FAMIGLIE PERCORSI E PROGETTI CURRICOLARI ED EXTRACURRICOLARI
 ITIS Sen. O.Jannuzzi PIANO DELL OFFERTA FORMATIVA ANNO SCOLASTICO 2009-2010 DESTINATARI: ALUNNI DEL TRIENNIO E LE LORO FAMIGLIE PERCORSI E PROGETTI CURRICOLARI ED EXTRACURRICOLARI FINALITA : 1. POTENZIAMENTO
ITIS Sen. O.Jannuzzi PIANO DELL OFFERTA FORMATIVA ANNO SCOLASTICO 2009-2010 DESTINATARI: ALUNNI DEL TRIENNIO E LE LORO FAMIGLIE PERCORSI E PROGETTI CURRICOLARI ED EXTRACURRICOLARI FINALITA : 1. POTENZIAMENTO
Rossetto Flavio a.s. 2011/2012 classe 5E 2
 Rossetto Flavio a.s. 2011/2012 classe 5E 2 2 e 4 pag vuota Finalità-Obiettivo pag. 5 Situazione di partenza pag. 6 Prime operazioni pag. 7 Schema elettrico pag. 9 Circuito stampato pag 10 Elenco componenti
Rossetto Flavio a.s. 2011/2012 classe 5E 2 2 e 4 pag vuota Finalità-Obiettivo pag. 5 Situazione di partenza pag. 6 Prime operazioni pag. 7 Schema elettrico pag. 9 Circuito stampato pag 10 Elenco componenti
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
MANUALE DELLA QUALITA Revisione: Sezione 4 SISTEMA DI GESTIONE PER LA QUALITA
 Pagina: 1 di 5 SISTEMA DI GESTIONE PER LA QUALITA 4.0 SCOPO DELLA SEZIONE Illustrare la struttura del Sistema di Gestione Qualità SGQ dell Istituto. Per gli aspetti di dettaglio, la Procedura di riferimento
Pagina: 1 di 5 SISTEMA DI GESTIONE PER LA QUALITA 4.0 SCOPO DELLA SEZIONE Illustrare la struttura del Sistema di Gestione Qualità SGQ dell Istituto. Per gli aspetti di dettaglio, la Procedura di riferimento
PROTOCOLLO DI INTESA PER LA REALIZZAZIONE DEL PROGETTO: "MANTENIMENTO E SVILUPPO DELL ATTIVITA DEL LABORATORIO TERRITORIALE PROVINCIALE NODO IN.F.E.
 PROTOCOLLO DI INTESA PER LA REALIZZAZIONE DEL PROGETTO: "MANTENIMENTO E SVILUPPO DELL ATTIVITA DEL LABORATORIO TERRITORIALE PROVINCIALE NODO IN.F.E.A. DELLA PROVINCIA DI ROVIGO E IL POTENZIAMENTO DELLA
PROTOCOLLO DI INTESA PER LA REALIZZAZIONE DEL PROGETTO: "MANTENIMENTO E SVILUPPO DELL ATTIVITA DEL LABORATORIO TERRITORIALE PROVINCIALE NODO IN.F.E.A. DELLA PROVINCIA DI ROVIGO E IL POTENZIAMENTO DELLA
Guida rapida Vodafone Internet Box
 Guida rapida Vodafone Internet Box Benvenuti nel mondo della connessione dati in mobilità di Vodafone Internet Box. In questa guida spieghiamo come installare e cominciare a utilizzare Vodafone Internet
Guida rapida Vodafone Internet Box Benvenuti nel mondo della connessione dati in mobilità di Vodafone Internet Box. In questa guida spieghiamo come installare e cominciare a utilizzare Vodafone Internet
Il progetto Vindis: un'occasione per costruire una rete di esperienze significative a supporto dei DSA
 Il progetto Vindis: un'occasione per costruire una rete di esperienze significative a supporto dei DSA Lucia Ferlino Istituto Tecnologie Didattiche del Consiglio Nazionale delle Ricerche, Genova Luigi
Il progetto Vindis: un'occasione per costruire una rete di esperienze significative a supporto dei DSA Lucia Ferlino Istituto Tecnologie Didattiche del Consiglio Nazionale delle Ricerche, Genova Luigi
C3 indirizzo Elettronica ed Elettrotecnica Profilo
 C3 indirizzo Elettronica ed Elettrotecnica Profilo Il Diplomato in Elettronica ed Elettrotecnica : - ha competenze specifiche nel campo dei materiali e delle tecnologie costruttive dei sistemi elettrici,
C3 indirizzo Elettronica ed Elettrotecnica Profilo Il Diplomato in Elettronica ed Elettrotecnica : - ha competenze specifiche nel campo dei materiali e delle tecnologie costruttive dei sistemi elettrici,
Mac Application Manager 1.3 (SOLO PER TIGER)
") Mac Application Manager 1.3 (SOLO PER TIGER) MacApplicationManager ha lo scopo di raccogliere in maniera centralizzata le informazioni piu salienti dei nostri Mac in rete e di associare a ciascun Mac i
Mac Application Manager 1.3 (SOLO PER TIGER) MacApplicationManager ha lo scopo di raccogliere in maniera centralizzata le informazioni piu salienti dei nostri Mac in rete e di associare a ciascun Mac i
IL VALORE DELLE CERTIFICAZIONI INFORMATICHE: dalla scuola della riforma, all Università, al mondo del lavoro
 Ufficio scolastico Regionale per la Toscana Direzione Regionale ISTITUTO TECNICO COMMERCIALE e per GEOMETRI E. FERMI PONTEDERA (PI) PROVINCIA DI PISA IL VALORE DELLE CERTIFICAZIONI INFORMATICHE: dalla
Ufficio scolastico Regionale per la Toscana Direzione Regionale ISTITUTO TECNICO COMMERCIALE e per GEOMETRI E. FERMI PONTEDERA (PI) PROVINCIA DI PISA IL VALORE DELLE CERTIFICAZIONI INFORMATICHE: dalla
Realizzazione di una chat su protocollo HTTP
 Università di Pisa Università di Pisa Percorsi Abilitanti Speciali (PAS) Percorsi Abilitanti Speciali (PAS) Realizzazione di una chat su protocollo HTTP Realizzazione di una chat su protocollo HTTP Feo
Università di Pisa Università di Pisa Percorsi Abilitanti Speciali (PAS) Percorsi Abilitanti Speciali (PAS) Realizzazione di una chat su protocollo HTTP Realizzazione di una chat su protocollo HTTP Feo
OFFERTA FORMATIVA INDIRIZZI DI STUDIO
 ISTITUTO TECNICO E. SCALFARO Piazza Matteotti, 1- CATANZARO Tel.: 0961 745155 - Fax: 0961 744438 E-mail:cztf010008@istruzione.it Sito: www.itiscalfaro.cz.it ANNO SCOLASTICO 2011 2012 OFFERTA FORMATIVA
ISTITUTO TECNICO E. SCALFARO Piazza Matteotti, 1- CATANZARO Tel.: 0961 745155 - Fax: 0961 744438 E-mail:cztf010008@istruzione.it Sito: www.itiscalfaro.cz.it ANNO SCOLASTICO 2011 2012 OFFERTA FORMATIVA
GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain.
 *+33(GLWRU GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain. Il programma si basa su un architettura di tasti funzionali presenti
*+33(GLWRU GHPPEditor è un software realizzato per produrre in modo rapido e guidato un part program per controlli numerici Heidenhain. Il programma si basa su un architettura di tasti funzionali presenti
PROGETTO PER LA TRASMISSIONE DOCUMENTI RELATIVI ALL APPROVAZIONE DELLE MANIFESTAZIONI IN FORMA DIGITALE
 PROGETTO PER LA TRASMISSIONE DOCUMENTI RELATIVI ALL APPROVAZIONE DELLE MANIFESTAZIONI IN FORMA DIGITALE L approvazione di una manifestazione nazionale od internazionale comporta spesso la trasmissione
PROGETTO PER LA TRASMISSIONE DOCUMENTI RELATIVI ALL APPROVAZIONE DELLE MANIFESTAZIONI IN FORMA DIGITALE L approvazione di una manifestazione nazionale od internazionale comporta spesso la trasmissione
Documentazione del progetto Classe 5 Cp A.s. 2011/2012
 Documentazione del progetto Classe 5 Cp A.s. 2011/2012 Muoversi di più per vivere meglio fitlife!! 1 PROGETTO DI CLASSE 5CP Muoversi di più per vivere meglio..fitlife!! L obiettivo del progetto è quello
Documentazione del progetto Classe 5 Cp A.s. 2011/2012 Muoversi di più per vivere meglio fitlife!! 1 PROGETTO DI CLASSE 5CP Muoversi di più per vivere meglio..fitlife!! L obiettivo del progetto è quello
ISTITUTO STATALE D ISTRUZIONE SUPERIORE F. BESTA MILANO
 ISTITUTO STATALE D ISTRUZIONE SUPERIORE F. BESTA MILANO PROTOCOLLO DI ACCOGLIENZA PER ALUNNI STRANIERI INDICE: PREMESSA 1. FINALITA 2. CONTENUTI 3. LA COMMISSIONE ACCOGLIENZA 4. PRIMA FASE DI ACCOGLIENZA
ISTITUTO STATALE D ISTRUZIONE SUPERIORE F. BESTA MILANO PROTOCOLLO DI ACCOGLIENZA PER ALUNNI STRANIERI INDICE: PREMESSA 1. FINALITA 2. CONTENUTI 3. LA COMMISSIONE ACCOGLIENZA 4. PRIMA FASE DI ACCOGLIENZA
Dall Algoritmo al Programma. Prof. Francesco Accarino IIS Altiero Spinelli Sesto San Giovanni
 Dall Algoritmo al Programma Prof. Francesco Accarino IIS Altiero Spinelli Sesto San Giovanni IL PROGRAMMA Gli algoritmi sono modelli di descrizione astratti e per controllarne il funzionamento devono essere
Dall Algoritmo al Programma Prof. Francesco Accarino IIS Altiero Spinelli Sesto San Giovanni IL PROGRAMMA Gli algoritmi sono modelli di descrizione astratti e per controllarne il funzionamento devono essere
Scopo della lezione. Informatica. Informatica - def. 1. Informatica
 Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Direzione Centrale per le Politiche dell Immigrazione e dell Asilo
 Direzione Centrale per le Politiche dell Immigrazione e dell Asilo Sistema inoltro telematico domande di nulla osta, ricongiungimento e conversioni Manuale utente Versione 2 Data creazione 02/11/2007 12.14.00
Direzione Centrale per le Politiche dell Immigrazione e dell Asilo Sistema inoltro telematico domande di nulla osta, ricongiungimento e conversioni Manuale utente Versione 2 Data creazione 02/11/2007 12.14.00
WebGis - Piano Comprensoriale di Protezione Civile
 "S@ve - Protezione dell'ambiente per la gestione ed il controllo del territorio, valutazione e gestione emergenze per il comprensorio del Vallo di Diano" I PRODOTTI: WebGis - Piano Comprensoriale di Protezione
"S@ve - Protezione dell'ambiente per la gestione ed il controllo del territorio, valutazione e gestione emergenze per il comprensorio del Vallo di Diano" I PRODOTTI: WebGis - Piano Comprensoriale di Protezione
CONVERTITORE SERIALE ASINCRONO RS485 / USB
 CONVERTITORE SERIALE ASINCRONO RS485 / USB DESCRIZIONE GENERALE Il prodotti RS485 / USB CONVERTER costituisce un'interfaccia in grado di realizzare una seriale asincrona di tipo RS485, utilizzando una
CONVERTITORE SERIALE ASINCRONO RS485 / USB DESCRIZIONE GENERALE Il prodotti RS485 / USB CONVERTER costituisce un'interfaccia in grado di realizzare una seriale asincrona di tipo RS485, utilizzando una
Gestione della memoria centrale
 Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Software per Helpdesk
 Software per Helpdesk Padova - maggio 2010 Antonio Dalvit - www.antoniodalvit.com Cosa è un helpdesk? Un help desk è un servizio che fornisce informazioni e assistenza ad utenti che hanno problemi nella
Software per Helpdesk Padova - maggio 2010 Antonio Dalvit - www.antoniodalvit.com Cosa è un helpdesk? Un help desk è un servizio che fornisce informazioni e assistenza ad utenti che hanno problemi nella
Piano Nazionale Scuola Digitale visione e strategie
 Ministero dell Istruzione, dell Università e della Ricerca Piano Nazionale Scuola Digitale visione e strategie Direttore Generale della DGSSSI MIUR Maria Letizia Melina Il P.N.S.D. e l Agenda l Digitale
Ministero dell Istruzione, dell Università e della Ricerca Piano Nazionale Scuola Digitale visione e strategie Direttore Generale della DGSSSI MIUR Maria Letizia Melina Il P.N.S.D. e l Agenda l Digitale
Politica d Uso Accettabile della scuola
 ISTITUTO COMPRENSIVO STATALE DON MILANI Viale delle Regioni, 62 70132 - Bari Telefono 080-5371951 Fax 080-5375520 e_mail: baic812002@istruzione.it - c.f. 93403070720 PEC baic812002@pec.istruzione.it www.donmilanibari.it
ISTITUTO COMPRENSIVO STATALE DON MILANI Viale delle Regioni, 62 70132 - Bari Telefono 080-5371951 Fax 080-5375520 e_mail: baic812002@istruzione.it - c.f. 93403070720 PEC baic812002@pec.istruzione.it www.donmilanibari.it
3. PROGETTO CURRICOLARE (Nuovo Ordinamento)
") La strategia di costruzione della personalità non può essere separata dal contesto cognitivo, così come il viceversa: dare istruzione significa fornire conoscenze e strumenti per interpretare se stessi
La strategia di costruzione della personalità non può essere separata dal contesto cognitivo, così come il viceversa: dare istruzione significa fornire conoscenze e strumenti per interpretare se stessi
Allegato A al CCNL 2006/2009 comparto Ministeri
 Allegato A al CCNL 2006/2009 comparto Ministeri AREA FUNZIONALE PRIMA ( ex A1 e A1S ) Appartengono a questa Area funzionale i lavoratori che svolgono attività ausiliarie, ovvero lavoratori che svolgono
Allegato A al CCNL 2006/2009 comparto Ministeri AREA FUNZIONALE PRIMA ( ex A1 e A1S ) Appartengono a questa Area funzionale i lavoratori che svolgono attività ausiliarie, ovvero lavoratori che svolgono
11/02/2015 MANUALE DI INSTALLAZIONE DELL APPLICAZIONE DESKTOP TELEMATICO VERSIONE 1.0
 11/02/2015 MANUALE DI INSTALLAZIONE DELL APPLICAZIONE DESKTOP TELEMATICO VERSIONE 1.0 PAG. 2 DI 38 INDICE 1. PREMESSA 3 2. SCARICO DEL SOFTWARE 4 2.1 AMBIENTE WINDOWS 5 2.2 AMBIENTE MACINTOSH 6 2.3 AMBIENTE
11/02/2015 MANUALE DI INSTALLAZIONE DELL APPLICAZIONE DESKTOP TELEMATICO VERSIONE 1.0 PAG. 2 DI 38 INDICE 1. PREMESSA 3 2. SCARICO DEL SOFTWARE 4 2.1 AMBIENTE WINDOWS 5 2.2 AMBIENTE MACINTOSH 6 2.3 AMBIENTE
Manuale Operativo per l utilizzo della piattaforma E-Learning@AQ. Versione 1.1
 Manuale Operativo per l utilizzo della piattaforma E-Learning@AQ Versione 1.1 Autore Antonio Barbieri, antonio.barbieri@gmail.com Data inizio compilazione 11 maggio 2009 Data revisione 14 maggio 2009 Sommario
Manuale Operativo per l utilizzo della piattaforma E-Learning@AQ Versione 1.1 Autore Antonio Barbieri, antonio.barbieri@gmail.com Data inizio compilazione 11 maggio 2009 Data revisione 14 maggio 2009 Sommario
PROGETTO PON/FESR 2014-2020
 PROGETTO PON/FESR 2014-2020 Prot.n. AOODGEFID/12810 del 15 Ottobre 2015 Avviso pubblico rivolto alle Istituzioni Scolastiche statali per la realizzazione di ambienti digitali Asse II Infrastrutture per
PROGETTO PON/FESR 2014-2020 Prot.n. AOODGEFID/12810 del 15 Ottobre 2015 Avviso pubblico rivolto alle Istituzioni Scolastiche statali per la realizzazione di ambienti digitali Asse II Infrastrutture per
MANUALE PARCELLA FACILE PLUS INDICE
 MANUALE PARCELLA FACILE PLUS INDICE Gestione Archivi 2 Configurazioni iniziali 3 Anagrafiche 4 Creazione prestazioni e distinta base 7 Documenti 9 Agenda lavori 12 Statistiche 13 GESTIONE ARCHIVI Nella
MANUALE PARCELLA FACILE PLUS INDICE Gestione Archivi 2 Configurazioni iniziali 3 Anagrafiche 4 Creazione prestazioni e distinta base 7 Documenti 9 Agenda lavori 12 Statistiche 13 GESTIONE ARCHIVI Nella
Prot.n. 7030 Roma, 29.10.2012
 Prot.n. 7030 Roma, 29.10.2012 Ai Direttori Generali degli Uffici Scolastici Regionali LORO SEDI e, p.c. Ai Referenti Regionali per le Attività Musicali LORO SEDI Oggetto:Assetto strutturale, organizzativo
Prot.n. 7030 Roma, 29.10.2012 Ai Direttori Generali degli Uffici Scolastici Regionali LORO SEDI e, p.c. Ai Referenti Regionali per le Attività Musicali LORO SEDI Oggetto:Assetto strutturale, organizzativo
WorkFLow (Gestione del flusso pratiche)
") WorkFLow (Gestione del flusso pratiche) Il workflow è l'automazione di una parte o dell'intero processo aziendale dove documenti, informazioni e compiti vengono passati da un partecipante ad un altro al
WorkFLow (Gestione del flusso pratiche) Il workflow è l'automazione di una parte o dell'intero processo aziendale dove documenti, informazioni e compiti vengono passati da un partecipante ad un altro al
Comunicazione tra Computer. Protocolli. Astrazione di Sottosistema di Comunicazione. Modello di un Sottosistema di Comunicazione
 I semestre 04/05 Comunicazione tra Computer Protocolli Prof. Vincenzo Auletta auletta@dia.unisa.it http://www.dia.unisa.it/professori/auletta/ Università degli studi di Salerno Laurea in Informatica 1
I semestre 04/05 Comunicazione tra Computer Protocolli Prof. Vincenzo Auletta auletta@dia.unisa.it http://www.dia.unisa.it/professori/auletta/ Università degli studi di Salerno Laurea in Informatica 1
GUIDA STUDENTI HOMEPAGE DEI CORSI ON-LINE
 GUIDA STUDENTI Benvenuti sulla piattaforma Des-K, basata su Moodle. Di seguito una breve introduzione alla navigazione tra i contenuti e le attività didattiche dei corsi on-line e una panoramica sui principali
GUIDA STUDENTI Benvenuti sulla piattaforma Des-K, basata su Moodle. Di seguito una breve introduzione alla navigazione tra i contenuti e le attività didattiche dei corsi on-line e una panoramica sui principali
PIANO DI MIGLIORAMENTO (PDM) IN RAPPORTO AL RAV PIANO TRIENNALE DELL'OFFERTA FORMATIVA (PTOF).
 IN RAPPORTO AL RAV PIANO TRIENNALE DELL'OFFERTA FORMATIVA (PTOF).") PIANO DI MIGLIORAMENTO (PDM) IN RAPPORTO AL RAV PIANO TRIENNALE DELL'OFFERTA FORMATIVA (PTOF). Adempimenti di cui al DPR 80/2013 e alla Legge 107/205. Come è noto i documenti che dovranno essere predisposti
PIANO DI MIGLIORAMENTO (PDM) IN RAPPORTO AL RAV PIANO TRIENNALE DELL'OFFERTA FORMATIVA (PTOF). Adempimenti di cui al DPR 80/2013 e alla Legge 107/205. Come è noto i documenti che dovranno essere predisposti
Manuale d uso per la raccolta: Monitoraggio del servizio di Maggior Tutela
 Manuale d uso per la raccolta: Monitoraggio del servizio di Maggior Tutela Pagina 1 di 9 Indice generale 1 Accesso alla raccolta... 3 2 Il pannello di controllo della raccolta e attivazione delle maschere...
Manuale d uso per la raccolta: Monitoraggio del servizio di Maggior Tutela Pagina 1 di 9 Indice generale 1 Accesso alla raccolta... 3 2 Il pannello di controllo della raccolta e attivazione delle maschere...
Sistema di Sorveglianza e Ambient Intelligence per Residenze Sanitarie Assistenziali
 Sistema di Sorveglianza e Ambient Intelligence per Residenze Sanitarie Assistenziali Genova Robot s.r.l. www.genovarobot.com info@genovarobot.com Genova Robot s.r.l fornisce un sistema intelligente con
Sistema di Sorveglianza e Ambient Intelligence per Residenze Sanitarie Assistenziali Genova Robot s.r.l. www.genovarobot.com info@genovarobot.com Genova Robot s.r.l fornisce un sistema intelligente con
MESA PROJECT ITIS G. Cardano Pavia New Curriculum
 MESA PROJECT ITIS G. Cardano Pavia New Curriculum L'impatto delle innovazioni educative del Progetto MESA ha portato alcuni cambiamenti significativi e miglioramenti nel curriculum dei seguenti argomenti:
MESA PROJECT ITIS G. Cardano Pavia New Curriculum L'impatto delle innovazioni educative del Progetto MESA ha portato alcuni cambiamenti significativi e miglioramenti nel curriculum dei seguenti argomenti:
Il servizio di registrazione contabile. che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili
 Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
Protocollo di tracciamento e valutazione degli studenti dei corsi di italiano ICoNLingua A.A. 2013-2014
 Progetto ICoNLingua Scienza senza Frontiere CsF- Italia Protocollo di tracciamento e valutazione degli studenti dei corsi di italiano ICoNLingua A.A. 2013-2014 1. Introduzione La valutazione sia in itinere
Progetto ICoNLingua Scienza senza Frontiere CsF- Italia Protocollo di tracciamento e valutazione degli studenti dei corsi di italiano ICoNLingua A.A. 2013-2014 1. Introduzione La valutazione sia in itinere
IN-COSCIENZA CIVILE. SCUOLA: Liceo Alessandro Volta - Federico Fellini di Riccione (Rimini)
") IN-COSCIENZA CIVILE SCUOLA: Liceo Alessandro Volta - Federico Fellini di Riccione (Rimini) ARCHIVIO: Archivio del Premio Ilaria Alpi - Biblioteca comunale di Riccione ALTRI PARTNER: Associazione Ilaria
IN-COSCIENZA CIVILE SCUOLA: Liceo Alessandro Volta - Federico Fellini di Riccione (Rimini) ARCHIVIO: Archivio del Premio Ilaria Alpi - Biblioteca comunale di Riccione ALTRI PARTNER: Associazione Ilaria
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012
 19-21 aprile 2012") ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012 REPORT DI DOCUMENTAZIONE DELLA SQUADRA Galileo Galilei s Robots and Mechanical Men Corporation del LICEO SCIENTIFICO GALILEO GALILEI VIALE BOLOGNINI,
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012 REPORT DI DOCUMENTAZIONE DELLA SQUADRA Galileo Galilei s Robots and Mechanical Men Corporation del LICEO SCIENTIFICO GALILEO GALILEI VIALE BOLOGNINI,
PROCEDURA DI COORDINAMENTO TRA GESTORI DI RETE AI SENSI DEGLI ARTICOLI 34 E 35 DELL ALLEGATO A ALLA DELIBERA ARG/ELT 99/08 (TICA)
") PROCEDURA DI COORDINAMENTO TRA GESTORI DI RETE AI SENSI DEGLI ARTICOLI 34 E 35 DELL ALLEGATO A ALLA DELIBERA ARG/ELT 99/08 (TICA) Il presente documento descrive le modalità di coordinamento tra gestori
PROCEDURA DI COORDINAMENTO TRA GESTORI DI RETE AI SENSI DEGLI ARTICOLI 34 E 35 DELL ALLEGATO A ALLA DELIBERA ARG/ELT 99/08 (TICA) Il presente documento descrive le modalità di coordinamento tra gestori
SISTEMI MULTIAGENTE. Esercizio
 Esercizio SISTEMI MULTIAGENTE Nello studio dei sistemi dinamici complessi la simulazione al computer ha un ruolo importante dal momento che presenta molti vantaggi rispetto ai metodi sperimentali più tradizionali;
Esercizio SISTEMI MULTIAGENTE Nello studio dei sistemi dinamici complessi la simulazione al computer ha un ruolo importante dal momento che presenta molti vantaggi rispetto ai metodi sperimentali più tradizionali;
TERM TALK. software per la raccolta dati
 software per la raccolta dati DESCRIZIONE Nell ambiente Start, Term Talk si caratterizza come strumento per la configurazione e la gestione di una rete di terminali per la raccolta dati. È inoltre di supporto
software per la raccolta dati DESCRIZIONE Nell ambiente Start, Term Talk si caratterizza come strumento per la configurazione e la gestione di una rete di terminali per la raccolta dati. È inoltre di supporto
BMSO1001. Virtual Configurator. Istruzioni d uso 02/10-01 PC
 BMSO1001 Virtual Configurator Istruzioni d uso 02/10-01 PC 2 Virtual Configurator Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Concetti
BMSO1001 Virtual Configurator Istruzioni d uso 02/10-01 PC 2 Virtual Configurator Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Concetti
Prot. AOODPPR/Reg.Uff 5468. Roma,18.12.2014. Ai Dirigenti Scolastici delle istituzioni scolastiche statali LORO SEDI
 Prot. AOODPPR/Reg.Uff 5468 Roma,18.12.2014 Ai Dirigenti Scolastici delle istituzioni scolastiche statali LORO SEDI e p.c. Ai Direttori Generali degli Uffici Scolastici Regionali Ai Dirigenti degli Ambiti
Prot. AOODPPR/Reg.Uff 5468 Roma,18.12.2014 Ai Dirigenti Scolastici delle istituzioni scolastiche statali LORO SEDI e p.c. Ai Direttori Generali degli Uffici Scolastici Regionali Ai Dirigenti degli Ambiti
GUIDA PER IL DOCENTE ALL UTILIZZO DELL APPLICATIVO ONLINE E PORTFOLIO
 GUIDA PER IL DOCENTE ALL UTILIZZO DELL APPLICATIVO ONLINE E PORTFOLIO http://eportfolio.tqmproject.eu Progetto "TQM Agreement n 2011 1 IT1 LEO05 01873; CUP G72F11000050006 1 SOMMARIO PREMESSA... 3 PAGINA
GUIDA PER IL DOCENTE ALL UTILIZZO DELL APPLICATIVO ONLINE E PORTFOLIO http://eportfolio.tqmproject.eu Progetto "TQM Agreement n 2011 1 IT1 LEO05 01873; CUP G72F11000050006 1 SOMMARIO PREMESSA... 3 PAGINA
Scuola Digitale. Manuale utente. Copyright 2014, Axios Italia
 Scuola Digitale Manuale utente Copyright 2014, Axios Italia 1 SOMMARIO SOMMARIO... 2 Accesso al pannello di controllo di Scuola Digitale... 3 Amministrazione trasparente... 4 Premessa... 4 Codice HTML
Scuola Digitale Manuale utente Copyright 2014, Axios Italia 1 SOMMARIO SOMMARIO... 2 Accesso al pannello di controllo di Scuola Digitale... 3 Amministrazione trasparente... 4 Premessa... 4 Codice HTML
Partecipare all organizzazione di convegni ed eventi
 Area di Riferimento 1 Gestione POF Riscrittura del POF alla luce delle innovazioni normative e dei bisogni formativi attuali, sia interni che del territorio Monitoraggio in itinere dell attuazione del
Area di Riferimento 1 Gestione POF Riscrittura del POF alla luce delle innovazioni normative e dei bisogni formativi attuali, sia interni che del territorio Monitoraggio in itinere dell attuazione del
NOTE DI PRESENTAZIONE DELLA MALAVOLTA CONSULTING S.a.s.
 NOTE DI PRESENTAZIONE DELLA MALAVOLTA CONSULTING S.a.s. Malavolta Consulting S.A.S. del Dott. Roberto Malavolta & C. 63016 Campofilone (AP) Via Borgo San Patrizio, 112 tel 0734 937058 - fax 0734 935084
NOTE DI PRESENTAZIONE DELLA MALAVOLTA CONSULTING S.a.s. Malavolta Consulting S.A.S. del Dott. Roberto Malavolta & C. 63016 Campofilone (AP) Via Borgo San Patrizio, 112 tel 0734 937058 - fax 0734 935084
AREA 5. RAPPORTI CON ENTI ESTERNI
 A.S. 2014/2015 AREA 1. REVISIONE E GESTIONE DEL POF REVISIONE E GESTIONE DEL POF ATTIVITA INTERNE PER IL POTENZIAMENTO E AMPLIAMENTO DELL OFFERTA FORMATIVA AREA 2. SERVIZI AL PERSONALE DOCENTE GESTIONE
A.S. 2014/2015 AREA 1. REVISIONE E GESTIONE DEL POF REVISIONE E GESTIONE DEL POF ATTIVITA INTERNE PER IL POTENZIAMENTO E AMPLIAMENTO DELL OFFERTA FORMATIVA AREA 2. SERVIZI AL PERSONALE DOCENTE GESTIONE
istraffic Sistema di monitoraggio Traffico
 istraffic Sistema di monitoraggio Traffico Scopo Lo scopo del sistema è quello di eseguire un analisi automatica del flusso di traffico in modo da rilevare eventi quali rallentamenti, code, veicoli fermi,
istraffic Sistema di monitoraggio Traffico Scopo Lo scopo del sistema è quello di eseguire un analisi automatica del flusso di traffico in modo da rilevare eventi quali rallentamenti, code, veicoli fermi,
Progetto della Federazione Italiana Pallavolo per la Scuola Primaria
 Progetto della Federazione Italiana Pallavolo per la Scuola Primaria a.s. 2007-2008 1,2,3 Minivolley! IL PROGETTO Il progetto 1,2,3 minivolley si propone di incrementare la pratica delle attività motorie
Progetto della Federazione Italiana Pallavolo per la Scuola Primaria a.s. 2007-2008 1,2,3 Minivolley! IL PROGETTO Il progetto 1,2,3 minivolley si propone di incrementare la pratica delle attività motorie
REGOLAMENTO del Centro Territoriale di Supporto Istituto Comprensivo Calcedonia
 Centro Territoriale di Supporto Calcedonia Istituto Comprensivo Calcedonia Via A. Guglielmini, 23 - Salerno Tel: 089792310-089792000/Fax: 089799631 htpp//www.icscuolacalcedoniasalerno.gov.it REGOLAMENTO
Centro Territoriale di Supporto Calcedonia Istituto Comprensivo Calcedonia Via A. Guglielmini, 23 - Salerno Tel: 089792310-089792000/Fax: 089799631 htpp//www.icscuolacalcedoniasalerno.gov.it REGOLAMENTO
Il glossario della Posta Elettronica Certificata (PEC) Diamo una definizione ai termini tecnici relativi al mondo della PEC.
 Diamo una definizione ai termini tecnici relativi al mondo della PEC.") Il glossario della Posta Elettronica Certificata (PEC) Diamo una definizione ai termini tecnici relativi al mondo della PEC. Avviso di mancata consegna L avviso, emesso dal sistema, per indicare l anomalia
Il glossario della Posta Elettronica Certificata (PEC) Diamo una definizione ai termini tecnici relativi al mondo della PEC. Avviso di mancata consegna L avviso, emesso dal sistema, per indicare l anomalia
da Centri Territoriali Permanenti Centri provinciali di Istruzione per Adulti di Augusta Marconi
 da Centri Territoriali Permanenti a Centri provinciali di Istruzione per Adulti di Augusta Marconi Introduzione QuickTime e un decompressore sono necessari per visualizzare quest'immagine. Attualmente
da Centri Territoriali Permanenti a Centri provinciali di Istruzione per Adulti di Augusta Marconi Introduzione QuickTime e un decompressore sono necessari per visualizzare quest'immagine. Attualmente
Linee guida per le Scuole 2.0
 Linee guida per le Scuole 2.0 Premesse Il progetto Scuole 2.0 ha fra i suoi obiettivi principali quello di sperimentare e analizzare, in un numero limitato e controllabile di casi, come l introduzione
Linee guida per le Scuole 2.0 Premesse Il progetto Scuole 2.0 ha fra i suoi obiettivi principali quello di sperimentare e analizzare, in un numero limitato e controllabile di casi, come l introduzione
Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android...
 Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
COSTRUIRE IL PIANO DELL OFFERTA FORMATIVA
 LA SCUOLA POSSIBILE Sviluppo sostenibile e costruzione delle competenze nell obbligo formativo Corso di formazione per docenti Isola del Liri 12-13 maggio 2008 COSTRUIRE IL PIANO DELL OFFERTA FORMATIVA
LA SCUOLA POSSIBILE Sviluppo sostenibile e costruzione delle competenze nell obbligo formativo Corso di formazione per docenti Isola del Liri 12-13 maggio 2008 COSTRUIRE IL PIANO DELL OFFERTA FORMATIVA
Campus scientifico e didattico del biomedicale Tecnologie della vita. Organi di indirizzo e gestione Piano annuale 2013-14
 Campus scientifico e didattico del biomedicale Tecnologie della vita Organi di indirizzo e gestione Piano annuale 2013-14 1 Premessa Il progetto di campus biomedicale è finalizzato ad apprendere competenze
Campus scientifico e didattico del biomedicale Tecnologie della vita Organi di indirizzo e gestione Piano annuale 2013-14 1 Premessa Il progetto di campus biomedicale è finalizzato ad apprendere competenze
REGOLAMENTO DELLA COMMISSIONE MENSA IC8 (Approvato dal Consiglio d Istituto nella seduta del 30/06/2015)
") ISTITUTO COMPRENSIVO N. 8 VIA CA' SELVATICA,11-40123 BOLOGNA Tel 051333384 Fax 0516143898 Sito Web: http://www,ottovolante.org e-mail: comprensivo8@gmail.com boic85100g@istruzione.it REGOLAMENTO DELLA
ISTITUTO COMPRENSIVO N. 8 VIA CA' SELVATICA,11-40123 BOLOGNA Tel 051333384 Fax 0516143898 Sito Web: http://www,ottovolante.org e-mail: comprensivo8@gmail.com boic85100g@istruzione.it REGOLAMENTO DELLA
FrerEnergy: PROGRAMMA PER LA SUPERVISIONE DEI CONSUMI DI ENERGIA ELETTRICA
 FrerEnergy: PROGRAMMA PER LA SUPERVISIONE DEI CONSUMI DI ENERGIA ELETTRICA Descrizione Generale E un programma di supervisione in grado di comunicare, visualizzare, memorizzare e stampare i consumi dell
FrerEnergy: PROGRAMMA PER LA SUPERVISIONE DEI CONSUMI DI ENERGIA ELETTRICA Descrizione Generale E un programma di supervisione in grado di comunicare, visualizzare, memorizzare e stampare i consumi dell
Le fattispecie di riuso
 Le fattispecie di riuso Indice 1. PREMESSA...3 2. RIUSO IN CESSIONE SEMPLICE...4 3. RIUSO CON GESTIONE A CARICO DEL CEDENTE...5 4. RIUSO IN FACILITY MANAGEMENT...6 5. RIUSO IN ASP...7 1. Premessa Poiché
Le fattispecie di riuso Indice 1. PREMESSA...3 2. RIUSO IN CESSIONE SEMPLICE...4 3. RIUSO CON GESTIONE A CARICO DEL CEDENTE...5 4. RIUSO IN FACILITY MANAGEMENT...6 5. RIUSO IN ASP...7 1. Premessa Poiché
Per scrivere una procedura che non deve restituire nessun valore e deve solo contenere le informazioni per le modalità delle porte e controlli
 CODICE Le fonti in cui si possono trovare tutorial o esempi di progetti utilizzati con Arduino si trovano nel sito ufficiale di Arduino, oppure nei forum di domotica e robotica. Il codice utilizzato per
CODICE Le fonti in cui si possono trovare tutorial o esempi di progetti utilizzati con Arduino si trovano nel sito ufficiale di Arduino, oppure nei forum di domotica e robotica. Il codice utilizzato per
CONTROLLO NUMERICO Z32
 CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
SOMMARIO. www.trustonline.org. 1. Introduzione 3. 2. Caratteristiche generali della piattaforma 3. 2.1. Amministrazione degli utenti 5
 www.trustonline.org SOMMARIO 1. Introduzione 3 2. Caratteristiche generali della piattaforma 3 2.1. Amministrazione degli utenti 5 2.2. Caricamento dei corsi 5 2.3. Publishing 6 2.4. Navigazione del corso
www.trustonline.org SOMMARIO 1. Introduzione 3 2. Caratteristiche generali della piattaforma 3 2.1. Amministrazione degli utenti 5 2.2. Caricamento dei corsi 5 2.3. Publishing 6 2.4. Navigazione del corso
Istituto Tecnico Industriale Statale. Galileo Galilei Conegliano (TV)
") Istituto Tecnico Industriale Statale Galileo Galilei Conegliano (TV) FINALITÀ DELL ISTITUTO L impegno dell ITIS G. Galilei è quello di educare persone umane, autonome, libere da pregiudizi, capaci di operare
Istituto Tecnico Industriale Statale Galileo Galilei Conegliano (TV) FINALITÀ DELL ISTITUTO L impegno dell ITIS G. Galilei è quello di educare persone umane, autonome, libere da pregiudizi, capaci di operare
ELETTROTECNICA E MACCHINE ELETTRICHE
 CORSO DI ELETTROTECNICA E MACCHINE Circuiti in corrente continua e alternata - Misure elettriche e laboratorio - Aspetti costruttivi, funzionamento e caratteristiche delle macchine elettriche 2005, pp.
CORSO DI ELETTROTECNICA E MACCHINE Circuiti in corrente continua e alternata - Misure elettriche e laboratorio - Aspetti costruttivi, funzionamento e caratteristiche delle macchine elettriche 2005, pp.
CONTROLLO NUMERICO Z32
 CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
CONTROLLO NUMERICO Z32 Meccaniche Arrigo Pecchioli Via di Scandicci 221-50143 Firenze (Italy) - Tel. (+39) 055 70 07 1 - Fax (+39) 055 700 623 e-mail: pear@pear.it - www.pear.it Hardware Cn Costruito su
INFORMATIVA SUL DIRITTO ALLA PRIVACY PER LA CONSULTAZIONE DEL SITO WEB www.arlatighislandi.it
 INFORMATIVA SUL DIRITTO ALLA PRIVACY PER LA CONSULTAZIONE DEL SITO WEB www.arlatighislandi.it redatto ai sensi del decreto legislativo n 196/2003 2 GENNAIO 2014 documento pubblico 1 PREMESSA 3 SEZIONE
INFORMATIVA SUL DIRITTO ALLA PRIVACY PER LA CONSULTAZIONE DEL SITO WEB www.arlatighislandi.it redatto ai sensi del decreto legislativo n 196/2003 2 GENNAIO 2014 documento pubblico 1 PREMESSA 3 SEZIONE