Agenti risolutori di problemi. Risolvere i problemi mediante ricerca Maria Simi a.a 2014/2015
|
|
|
- Silvio Bucci
- 8 anni fa
- Visualizzazioni
Transcript
1 Agenti risolutori di problemi Risolvere i problemi mediante ricerca Maria Simi a.a 2014/2015

2 Agenti risolutori di problemi Adottano il paradigma della risoluzione di problemi come ricerca in uno spazio di stati (problem solving). Sono agenti con modello che adottano una rappresentazione atomica dello stato Sono particolari agenti con obiettivo, che pianificano l intera sequenza di mosse prima di agire

3 Il processo di risoluzione Passi che l agente segue: 1. Determinazione obiettivo (un insieme di stati) 2. Formulazione del problema - rappresentazione degli stati - rappresentazione delle azioni 3. Determinazione della soluzione mediante ricerca (un piano) 4. Esecuzione del piano

4 Che tipo di assunzioni? L ambiente è statico Osservabile Discreto un insieme finito di azioni possibili Deterministico Si assume che l agente possa eseguire il piano ad occhi chiusi. Niente può andare storto.

5 Formulazione del problema Un problema può essere definito formalmente mediante cinque componenti: 1. Stato iniziale 2. Azioni possibili in s: Azioni(s) 3. Modello di transizione: Risultato: stato x azione stato Risultato(s, a) = s, uno stato successore 1, 2 e 3 definiscono implicitamente lo spazio degli stati
 = s,")
6 Formulazione del problema (cnt.) 3. Test obiettivo: Un insieme di stati obiettivo Goal-Test: stato {true, false} 4. Costo del cammino somma dei costi delle azioni (costo dei passi) costo di passo: c(s, a, s ) Il costo di un azione/passo non è mai negativo

7 Algoritmi di ricerca Gli algoritmi di ricerca prendono in input un problema e restituiscono un cammino soluzione, i.e. un cammino che porta dallo stato iniziale a uno stato goal Misura delle prestazioni Trova una soluzione? Quanto costa trovarla? Quanto efficiente è la soluzione? Costo totale = costo della ricerca + costo del cammino soluzione

8 Itinerario: il problema
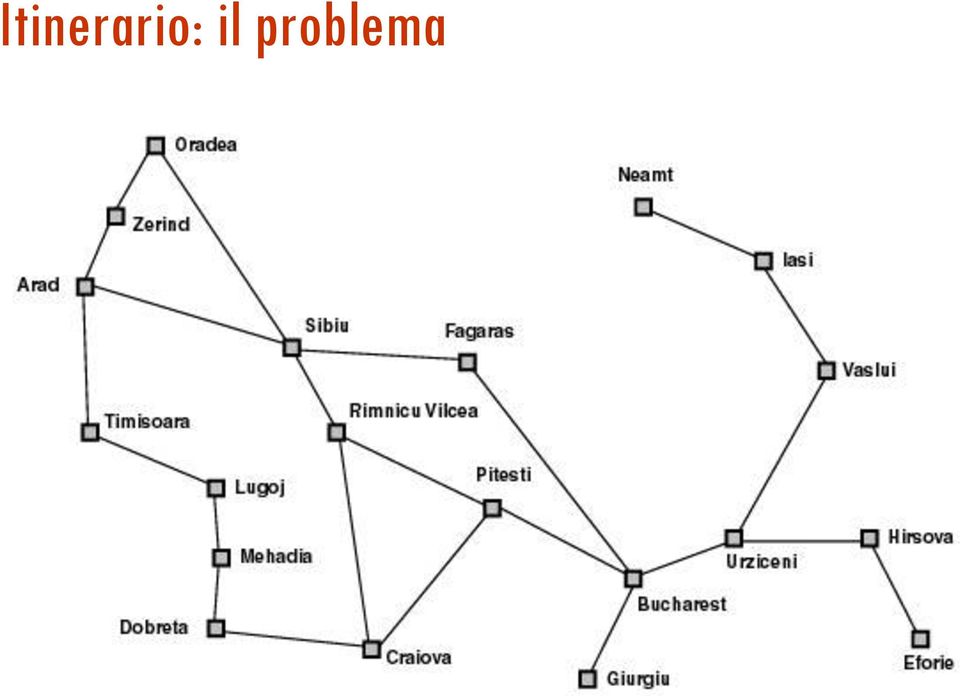
9 Itinerario: la formulazione Stati: le città. Es. In(Pitesti) Stato iniziale: la città da cui si parte. In(Arad) Azioni: spostarsi su una città vicina collegata Azioni(In(Arad)) ={Go(Sibiu), Go(Zerind) } Modello di transizione Risultato(In(Arad), Go(Sibiu)) = In(Sibiu) Costo del cammino: somma delle lunghezze delle strade Lo spazio degli stati coincide con la rete di collegamenti tra città
, Go(Sibiu)) = In(Sibiu) Costo del cammino: somma")
10 Aspirapolvere: il problema Versione semplice: solo due locazioni, sporche o pulite, l agente può essere in una delle due Percezioni: Sporco NonSporco Azioni: Sinistra (L) Destra (R) Aspira (S)
 Destra (R)")
11 Aspirapolvere: formulazione Obiettivo: rimuovere lo sporco { 7, 8 } Ogni azione ha costo 1 Spazio degli stati :

12 Il puzzle dell otto


13 Puzzle dell otto: formulazione Stati: possibili configurazioni della scacchiera Stato iniziale: una configurazione Obiettivo: una configurazione Goal-Test: Stato obiettivo? Azioni: mosse della casella bianca in sù: in giù: a destra: a sinistra: Costo cammino: ogni passo costa 1 Lo spazio degli stati è un grafo con possibili cicli.

14 Le otto regine: il problema Collocare 8 regine sulla scacchiera in modo tale che nessuna regina sia attaccata da altre

15 Le otto regine: Formulazione incrementale 1 Stati: scacchiere con 0-8 regine Goal-Test: 8 regine sulla scacchiera, nessuna attaccata Costo cammino: zero Azioni: aggiungi una regina ~ 1, sequenze da considerare!

16 Le otto regine: Formulazione incrementale 2 Stati: scacchiere con 0-8 regine, nessuna minacciata Goal-Test: 8 regine sulla scacchiera, nessuna minacciata Costo cammino: zero Azioni: aggiungi una regina nella colonna vuota più a destra ancora libera in modo che non sia minacciata 2057 sequenze da considerare

17 Le 8 regine: Formulazione a stato completo Goal-Test: 8 regine sulla scacchiera, nessuna minacciata Costo cammino: zero Stati: scacchiere con 8 regine, una per colonna Azioni: sposta una regina nella colonna, se minacciata

18 Dimostrazione di teoremi Il problema: Dato un insieme di premesse {s, t, q p, r p, v q, t r, s v} dimostrare una proposizione p Nel calcolo proposizionale un unica regola di inferenza, il Modus Ponens (MP): Se p e p q allora q
: Se p e p q")
19 Dim. teoremi: formulazione Stati: insiemi di proposizioni Stato iniziale: un insieme di proposizioni (le premesse). Stato obiettivo: un insieme di proposizioni contenente il teorema da dimostrare. Es p. Operatori: l applicazione del MP, che aggiunge teoremi continua

20 Dim. teoremi: spazio degli stati {s, t, q p, r p, v q, t r, s v} {s, t, q p, r p, v q, t r, s v, v} {s, t, q p, r p, v q, t r, s v, r} {s, t, q p, r p, v q, t r, s v, v, q} {s, t, q p, r p, v q, t r, s v, r, p} {s, t, q p, r p, v q, t r, s v, v, q, p}

21 Problemi reali Pianificazione di viaggi aerei Problema del commesso viaggiatore Configurazione VLSI Navigazione di robot Montaggio automatico Progettazione di proteine
22 Ricerca della soluzione Generazione di un albero di ricerca sovrapposto allo spazio degli stati
23 Ricerca della soluzione Generazione di un albero di ricerca sovrapposto allo spazio degli stati
24 Ricerca ad albero function Ricerca-Albero (problema) returns soluzione oppure fallimento Inizializza la frontiera con stato iniziale del problema loop do if la frontiera è vuota then return fallimento Scegli un nodo foglia da espandere e rimuovilo dalla frontiera if il nodo contiene uno stato obiettivo then return la soluzione corrispondente Espandi il nodo e aggiungi i successori alla frontiera
25 I nodi dell albero di ricerca Un nodo n è una struttura dati con quattro componenti: Uno stato: n.stato Il nodo padre: n.padre L azione effettuata per generarlo: n.azione Il costo del cammino dal nodo iniziale al nodo: n.costo-cammino indicata come g(n)
26 Struttura dati per la frontiera Frontiera: lista dei nodi in attesa di essere espansi (le foglie dell albero di ricerca). La frontiera è implementata come una coda con operazioni: Vuota?(coda) POP(coda) estrae il primo elemento Inserisci(elemento, coda) Diversi tipi di coda hanno diverse funzioni di inserimento e implementano strategie diverse
27 Diversi tipi di strategie FIFO- First In First Out Viene estratto l elemento più vecchio (in attesa da più tempo); in nuovi nodi sono aggiunti alla fine. LIFO-Last In First Out Viene estratto il più recentemente inserito; i nuovi nodi sono inseriti all inizio Coda non priorità Viene estratto quello con priorità più alta in base a una funzione di ordinamento; dopo l inserimento dei nuovi nodi si riordina.
28 Strategie non informate Ricerca in ampiezza Ricerca di costo uniforme Ricerca in profondità Ricerca in profondità limitata Ricerca con approfondimento iterativo Vs strategie di ricerca euristica (o informata): fanno uso di informazioni riguardo alla distanza stimata dalla soluzione
29 Valutazione di una strategia Completezza: se la soluzione esiste viene trovata Ottimalità (ammissibilità): trova la soluzione migliore, con costo minore Complessità in tempo: tempo richiesto per trovare la soluzione Complessità in spazio: memoria richiesta
30 Ricerca in ampiezza (BF) Implementata con una coda che inserisce alla fine (FIFO)
31 Ricerca in ampiezza (su albero) function Ricerca-Ampiezza-A (problema) returns soluzione oppure fallimento nodo = un nodo con stato il problema.stato-iniziale e costo-di-cammino=0 if problema.test-obiettivo(nodo.stato) then return Soluzione(nodo) frontiera = una coda FIFO con nodo come unico elemento loop do if Vuota?(frontiera) then return fallimento nodo = POP(frontiera) for each azione in problema.azioni(nodo.stato) do figlio = Nodo-Figlio(problema, nodo, azione) if Problema.TestObiettivo(figlio.Stato) then return Soluzione(figlio) frontiera = Inserisci(figlio, frontiera) /* frontiera gestita come coda FIFO end
32 Analisi complessità spazio-temporale Assumiamo b = fattore di diramazione (numero max di successori) d = profondità del nodo obiettivo più superficiale m = lunghezza massima dei cammini nello spazio di ricerca
33 Ricerca in ampiezza: analisi Strategia completa Strategia ottimale se gli operatori hanno tutti lo stesso costo k, cioè g(n) = k depth(n), dove g(n) è il costo del cammino per arrivare a n Complessità nel tempo (nodi generati) T(b, d) = b + b b d O(b d ) Complessità spazio (nodi in memoria): O(b d ) Nota: O notazione per la complessità asintotica
34 Ricerca in ampiezza: esempio Esempio: b=10; 1 milione nodi al sec generati; 1 nodo occupa 1000 byte Profondità Nodi Tempo Memoria ,11 ms 107 kilobyte ms 10,6 megabyte sec 1 gigabyte min 103 gigabyte ore 10 terabyte giorni 1 petabyte ,5 anni 10 esabyte
35 Ricerca di costo uniforme (UC) Generalizzazione della ricerca in ampiezza: si sceglie il nodo di costo minore sulla frontiera (si intende il costo del cammino) Implementata da una coda ordinata per costo crescente (in cima i nodi di costo minore)
36 Ricerca UC (su albero) function Ricerca-UC-A (problema) returns soluzione oppure fallimento nodo = un nodo con stato il problema.stato-iniziale e costo-di-cammino=0 frontiera = una coda con priorità con nodo come unico elemento loop do if Vuota?(frontiera) then return fallimento nodo = POP(frontiera) if problema.testobiettivo(nodo.stato) then return Soluzione(nodo) for each azione in problema.azioni(nodo.stato) do figlio = Nodo-Figlio(problema, nodo, azione) frontiera = Inserisci(figlio, frontiera) /* in coda con priorità end
37 Costo uniforme: analisi Ottimalità e completezza garantite purché il costo degli archi sia maggiore di 0. C* è il costo della soluzione ottima C*/ è il numero di mosse nel caso peggiore, arrotondato per difetto Complessità: O(b 1+ C*/ ) Nota: quando ogni azione ha lo stesso costo UC somiglia a BF ma complessità O(b 1+d )
38 Ricerca in profondità Implementata da una coda che mette i successori in testa alla lista (LIFO, pila o stack).
39 Ricerca in profondità: analisi Se m distanza massima della soluzione nello spazio di ricerca b fattore di diramazione Tempo: O(b m+1 ) Occupazione memoria: bm + 1 Strategia non completa e non ottimale. Drastico risparmio in memoria: BF d=16 DF d=16 10 esabyte 156 Kbyte
40 Ricerca in profondità ricorsiva Ancora più efficiente in occupazione di memoria perché mantiene solo il cammino corrente (solo m nodi nel caso pessimo) Realizzata da un algoritmo ricorsivo con backtracking che non necessita di tenere in memoria b nodi per ogni livello, ma salva lo stato su uno stack a cui torna in caso di fallimento per fare altri tentativi.
41 Ricerca in profondità (su albero) function Ricerca-DF-A (problema) returns soluzione oppure fallimento return Ricerca-DF-ricorsiva(CreaNodo(problema.Stato-iniziale), problema) function Ricerca-DF-ricorsiva(nodo, problema) returns soluzione oppure fallimento if problema.testobiettivo(nodo.stato) then return Soluzione(nodo) else for each azione in problema.azioni(nodo.stato) do figlio = Nodo-Figlio(problema, nodo, azione) risultato = Ricerca-DF-ricorsiva(figlio, problema) if risultato fallimento then return risultato return fallimento
42 Ricerca in profondità limitata (DL) Si va in profondità fino ad un certo livello predefinito l Completa per problemi in cui si conosce un limite superiore per la profondità della soluzione. Es. Route-finding limitata dal numero di città 1 Completo: se d < l Non ottimale Complessità tempo: O(b l ) Complessità spazio: O(b.l )
43 Approfondimento iterativo (ID)
44 ID: analisi Miglior compromesso tra BF e DF BF: b+b 2 + +b d-1 +b d con b=10 e d= = ID: I nodi dell ultimo livello generati una volta, quelli del penultimo 2, quelli del terzultimo 3 quelli del primo d volte ID: (d)b+(d-1) b b d-2 +2b d-1 +1b d = = Complessità tempo: O(b d ) Spazio: O(b.d)
45 Direzione della ricerca Un problema ortogonale alla strategia è la direzione della ricerca: ricerca in avanti o guidata dai dati: si esplora lo spazio di ricerca dallo stato iniziale allo stato obiettivo; ricerca all indietro o guidata dall obiettivo: si esplora lo spazio di ricerca a partire da uno stato goal e riconducendosi a sotto-goal fino a trovare uno stato iniziale.
46 Quale direzione? Conviene procedere nella direzione in cui il fattore di diramazione è minore Si preferisce ricerca all indietro quando: l obiettivo e chiaramente definito (th. pr.) o si possono formulare una serie limitata di ipotesi; i dati del problema non sono noti e la loro acquisizione può essere guidata dall obiettivo Si preferisce ricerca in avanti quando: gli obiettivi possibili sono molti (design) abbiamo una serie di dati da cui partire
47 Ricerca bidirezionale Si procede nelle due direzioni fino ad incontrarsi
48 Ricerca bidirezionale: analisi Complessità tempo: O(b d/2 ) (test intersezione in tempo costante, es. hash table) Complessità spazio: O(b d/2 ) (almeno tutti i nodi in una direzione in memoria, es usando BF) NOTA: non sempre applicabile, es. predecessori non definiti, troppi stati obiettivo
49 Confronto delle strategie (albero) Criterio BF UC DF DL ID Bidir Completa? si si(^) no si (+) si si Tempo Spazio O(b d ) O(b d ) O(b 1+ C*/ ) O(b 1+ C*/ ) O(b m ) O(bm) O(b l ) O(bl) O(b d ) O(bd) O(b d/2 ) O(b d/2 ) Ottimale? si(*) si(^) no no si(*) si (*) se gli operatori hanno tutti lo stesso costo (^) per costi degli archi > 0 (+) per problemi per cui si conosce un limite alla profondità della soluzione (se l >d)
50 Ricerca su grafi: cammini ciclici I cammini ciclici rendono gli alberi di ricerca infiniti
51 Ricerca su grafi: ridondanze Su spazi di stati a grafo si generano più volte gli stessi nodi nella ricerca, anche in assenza di cicli.
52 Ridondanza nelle griglie Visitare stati già visitati fa compiere lavoro inutile. Come evitarlo?
53 Compromesso tra spazio e tempo Ricordare gli stati già visitati occupa spazio ma ci consente di evitare di visitarli di nuovo Gli algoritmi che dimenticano la propria storia sono destinati a ripeterla!
54 Tre soluzioni In ordine crescente di costo e di efficacia: Non tornare nello stato da cui si proviene: si elimina il genitore dai nodi successori Non creare cammini con cicli: si controlla che i successori non siano antenati del nodo corrente Non generare nodi con stati già visitati: ogni nodo visitato deve essere tenuto in memoria per una complessità O(s) dove s è il numero di stati possibili (hash table).
55 Ricerca su grafi Mantiene una lista dei nodi visitati (lista chiusa) Prima di espandere un nodo si controlla se lo stato era stato già incontrato prima Se questo succede, il nodo appena trovato non viene espanso Ottimale solo se abbiamo la garanzia che il costo del nuovo cammino non è maggiore
56 Ricerca sul grafo della Romania La ricerca su grafo esplora uno stato al più una volta La frontiera separa i nodi esplorati da quelli non esplorati
57 Ricerca-grafo in ampiezza function Ricerca-Ampiezza-g (problema) returns soluzione oppure fallimento nodo = un nodo con stato il problema.stato-iniziale e costo-di-cammino=0 if problema.test-obiettivo(nodo.stato) then return Soluzione(nodo) frontiera = una coda FIFO con nodo come unico elemento esplorati = insieme vuoto loop do if Vuota?(frontiera) then return fallimento nodo = POP(frontiera); aggiungi nodo.stato a esplorati for each azione in problema.azioni(nodo.stato) do figlio = Nodo-Figlio(problema, nodo, azione) if figlio.stato non è in esplorati e non è in frontiera then if Problema.TestObiettivo(figlio.Stato) then return Soluzione(figlio) frontiera = Inserisci(figlio, frontiera) /* in coda
58 Ricerca-grafo UC function Ricerca-UC-G (problema) returns soluzione oppure fallimento nodo = un nodo con stato il problema.stato-iniziale e costo-di-cammino=0 frontiera = una coda con priorità con nodo come unico elemento esplorati = insieme vuoto loop do if Vuota?(frontiera) then return fallimento nodo = POP(frontiera); if problema.testobiettivo(nodo.stato) then return Soluzione(nodo) aggiungi nodo.stato a esplorati for each azione in problema.azioni(nodo.stato) do figlio = Nodo-Figlio(problema, nodo, azione) if figlio.stato non è in esplorati e non è in frontiera then frontiera = Inserisci(figlio, frontiera) /* in coda con priorità else if figlio.stato è in frontiera con Costo-cammino più alto then sostituisci quel nodo frontiera con figlio
59 Conclusioni Un agente per problem solving adotta un paradigma generale di risoluzione dei problemi: Formula il problema Ricerca la soluzione nello spazio degli stati Strategie non informate per la ricerca della soluzione Prossima volta: come si può ricercare meglio
Agenti risolutori di problemi
 Agenti risolutori di problemi Agenti risolutori di problemi Risolvere i problemi come ricerca Maria Simi a.a 2010/2011 Adottano il paradigma della risoluzione di problemi come ricerca in uno spazio di
Agenti risolutori di problemi Agenti risolutori di problemi Risolvere i problemi come ricerca Maria Simi a.a 2010/2011 Adottano il paradigma della risoluzione di problemi come ricerca in uno spazio di
Agenti risolutori di problemi
 Agenti risolutori di problemi Agenti risolutori di problemi Risolvere i problemi mediante ricerca Maria Simi a.a 2012/2013 Adottano il paradigma della risoluzione di problemi come ricerca in uno spazio
Agenti risolutori di problemi Agenti risolutori di problemi Risolvere i problemi mediante ricerca Maria Simi a.a 2012/2013 Adottano il paradigma della risoluzione di problemi come ricerca in uno spazio
Agenti risolutori di problemi
 Agenti risolutori di problemi Risolvere i problemi mediante ricerca Alessio Micheli a.a. 2015/2016 Credits: Maria Simi Russell-Norvig Agenti risolutori di problemi Adottano il paradigma della risoluzione
Agenti risolutori di problemi Risolvere i problemi mediante ricerca Alessio Micheli a.a. 2015/2016 Credits: Maria Simi Russell-Norvig Agenti risolutori di problemi Adottano il paradigma della risoluzione
Ricerca non informata
 Ricerca non informata Corso di Intelligenza Artificiale, a.a. 2017-2018 Prof. Francesco Trovò 05/03/2018 Ricerca non informata Definizione del problema della ricerca Architettura necessaria Blind search
Ricerca non informata Corso di Intelligenza Artificiale, a.a. 2017-2018 Prof. Francesco Trovò 05/03/2018 Ricerca non informata Definizione del problema della ricerca Architettura necessaria Blind search
Intelligenza Artificiale. Risoluzione dei Problemi
 Intelligenza Artificiale Risoluzione dei Problemi Strategie non-informate: principali 1. breadth-first; 2. depth-first; 3. depth-first a profondità limitata; 4. ad approfondimento iterativo. Ricerca in
Intelligenza Artificiale Risoluzione dei Problemi Strategie non-informate: principali 1. breadth-first; 2. depth-first; 3. depth-first a profondità limitata; 4. ad approfondimento iterativo. Ricerca in
Espansione: si parte da uno stato e applicando gli operatori (o la funzione successore) si generano nuovi stati.
 si generano nuovi stati.") CERCARE SOLUZIONI Generare sequenze di azioni. Espansione: si parte da uno stato e applicando gli operatori (o la funzione successore) si generano nuovi stati. Strategia di ricerca: ad ogni passo scegliere
CERCARE SOLUZIONI Generare sequenze di azioni. Espansione: si parte da uno stato e applicando gli operatori (o la funzione successore) si generano nuovi stati. Strategia di ricerca: ad ogni passo scegliere
Ricerca Cieca. Spazio di Ricerca. ! albero di ricerca. Russell & Norvig: Introduzione al Problem Solving. Introduzione al Problem Solving
 Ricerca Cieca Russell & Norvig: 3.4 3.6 Spazio di Ricerca! albero di ricerca Concetti di Base Albero di ricerca Espansione nodi Strategia di ricerca: Per ogni nodo determina quale nodo espandere Nodi di
Ricerca Cieca Russell & Norvig: 3.4 3.6 Spazio di Ricerca! albero di ricerca Concetti di Base Albero di ricerca Espansione nodi Strategia di ricerca: Per ogni nodo determina quale nodo espandere Nodi di
Agenti che risolvono problemi attraverso la ricerca in uno spazio di stati
 Università di Bergamo Facoltà di Ingegneria Intelligenza Artificiale Paolo Salvaneschi A5_1 V1.4 Agenti che risolvono problemi attraverso la ricerca in uno spazio di stati Il contenuto del documento è
Università di Bergamo Facoltà di Ingegneria Intelligenza Artificiale Paolo Salvaneschi A5_1 V1.4 Agenti che risolvono problemi attraverso la ricerca in uno spazio di stati Il contenuto del documento è
Problemi CSP: Problemi di. soddisfacimento di vincoli. Colorazione di una mappa. Formulazione di problemi CSP. Formulazione. Tipi di problemi CSP
 Problemi di soddisfacimento di vincoli Maria Simi a.a. 2010/2011 Problemi CSP: soddisfacimento di vincoli Sono problemi con una struttura particolare, per cui conviene pensare ad algoritmi specializzati.
Problemi di soddisfacimento di vincoli Maria Simi a.a. 2010/2011 Problemi CSP: soddisfacimento di vincoli Sono problemi con una struttura particolare, per cui conviene pensare ad algoritmi specializzati.
Intelligenza Artificiale. Tecniche di ricerca basate sullo spazio degli stati
 Intelligenza Artificiale Tecniche di ricerca basate sullo spazio degli stati Marco Piastra Ricerca e stati - 1 Problemi diversi, soluzioni simili Fox, Goat and Cabbage La definizione prevede Uno stato
Intelligenza Artificiale Tecniche di ricerca basate sullo spazio degli stati Marco Piastra Ricerca e stati - 1 Problemi diversi, soluzioni simili Fox, Goat and Cabbage La definizione prevede Uno stato
Algoritmi di Ricerca
 Algoritmi di Ricerca Contenuto Algoritmi non informati Nessuna conoscenza sul problema in esame Algoritmi euristici Sfruttano conoscenze specifiche sul problema Giochi Quando la ricerca è ostacolata da
Algoritmi di Ricerca Contenuto Algoritmi non informati Nessuna conoscenza sul problema in esame Algoritmi euristici Sfruttano conoscenze specifiche sul problema Giochi Quando la ricerca è ostacolata da
Problema del cammino minimo
 Algoritmi e Strutture di Dati II Problema del cammino minimo Un viaggiatore vuole trovare la via più corta per andare da una città ad un altra. Possiamo rappresentare ogni città con un nodo e ogni collegamento
Algoritmi e Strutture di Dati II Problema del cammino minimo Un viaggiatore vuole trovare la via più corta per andare da una città ad un altra. Possiamo rappresentare ogni città con un nodo e ogni collegamento
Algoritmi e Strutture Dati
 Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino A.A. 2006/07 Il concetto di dato Il concetto di tipo di dato Insertion Sort for j 2 to lenght[a]
Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino A.A. 2006/07 Il concetto di dato Il concetto di tipo di dato Insertion Sort for j 2 to lenght[a]
5.1 Metodo Branch and Bound
 5. Metodo Branch and Bound Consideriamo un generico problema di ottimizzazione min{ c(x) : x X } Idea: Ricondurre la risoluzione di un problema difficile a quella di sottoproblemi più semplici effettuando
5. Metodo Branch and Bound Consideriamo un generico problema di ottimizzazione min{ c(x) : x X } Idea: Ricondurre la risoluzione di un problema difficile a quella di sottoproblemi più semplici effettuando
2 OTTIMIZZAZIONE SU GRAFI. E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 2 OTTIMIZZAZIONE SU GRAFI E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Molti problemi decisionali possono essere formulati utilizzando il linguaggio della teoria dei grafi. Esempi: - problemi di
2 OTTIMIZZAZIONE SU GRAFI E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Molti problemi decisionali possono essere formulati utilizzando il linguaggio della teoria dei grafi. Esempi: - problemi di
Intelligenza Artificiale. Ricerca euristica Algoritmo A*
 Intelligenza Artificiale Ricerca euristica Algoritmo A* Marco Piastra Metodi di ricerca - Ricerca non informata Ricerca nello spazio degli stati Definizione di un grafo come spazio degli stati I nodi rappresentano
Intelligenza Artificiale Ricerca euristica Algoritmo A* Marco Piastra Metodi di ricerca - Ricerca non informata Ricerca nello spazio degli stati Definizione di un grafo come spazio degli stati I nodi rappresentano
Introduzione all Intelligenza Artificiale a.a. 2016/17
 Introduzione all Intelligenza Artificiale a.a. 2016/17 Prima prova intermedia 7 Aprile 2017 PRIMA PARTE Domande (punti 7) La risposta corretta alla maggior parte delle domande abilita la correzione della
Introduzione all Intelligenza Artificiale a.a. 2016/17 Prima prova intermedia 7 Aprile 2017 PRIMA PARTE Domande (punti 7) La risposta corretta alla maggior parte delle domande abilita la correzione della
Algoritmi e Strutture Dati
 Maria Rita Di Berardini 2, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino 2 Polo di Scienze Università di Camerino ad Ascoli Piceno Il concetto di dato Il concetto
Maria Rita Di Berardini 2, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino 2 Polo di Scienze Università di Camerino ad Ascoli Piceno Il concetto di dato Il concetto
Algoritmi e Strutture Dati
 Strutture Elementari Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino 29 ottobre 2008 Strutture Dati Astratte Il concetto di dato Il concetto
Strutture Elementari Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino 29 ottobre 2008 Strutture Dati Astratte Il concetto di dato Il concetto
Ricerca euristica. Funzioni di valutazione euristica. Esempi di euristica. Strategia best-first: esempio. Algoritmo di ricerca Best-First 3/17/11
 Ricerca euristica Ricerca euristica Maria Simi a.a. 2010/2011 La ricerca esaustiva non è praticabile in problemi di complessità esponenziale Noi usiamo conoscenza del problema ed esperienza per riconoscere
Ricerca euristica Ricerca euristica Maria Simi a.a. 2010/2011 La ricerca esaustiva non è praticabile in problemi di complessità esponenziale Noi usiamo conoscenza del problema ed esperienza per riconoscere
Risoluzione automatica di problemi. Sistemi distribuiti LS Prof. Andrea Omicini A.A
 Risoluzione automatica di problemi Sistemi distribuiti LS Prof. Andrea Omicini A.A. 2003-2004 Problemi del risolvere problemi Goal organizzare il comportamento del problema attorno al goal rappresentare
Risoluzione automatica di problemi Sistemi distribuiti LS Prof. Andrea Omicini A.A. 2003-2004 Problemi del risolvere problemi Goal organizzare il comportamento del problema attorno al goal rappresentare
Alberi ed Alberi Binari di Ricerca
 Alberi ed Alberi Binari di Ricerca Il tipo di dato Albero Un albero è una struttura di data organizzata gerarchicamente. È costituito da un insieme di nodi collegati tra di loro: ogni nodo contiene dell
Alberi ed Alberi Binari di Ricerca Il tipo di dato Albero Un albero è una struttura di data organizzata gerarchicamente. È costituito da un insieme di nodi collegati tra di loro: ogni nodo contiene dell
Laboratorio di Algoritmi
 Laboratorio di Algoritmi Corso di Laurea in Matematica Roberto Cordone DI - Università degli Studi di Milano Lezioni: Martedì 8.30-10.30 in aula 3 Mercoledì 10.30-12.30 in Aula 2 Giovedì 8.30-10.30 in
Laboratorio di Algoritmi Corso di Laurea in Matematica Roberto Cordone DI - Università degli Studi di Milano Lezioni: Martedì 8.30-10.30 in aula 3 Mercoledì 10.30-12.30 in Aula 2 Giovedì 8.30-10.30 in
Problemi di soddisfacimento di vincoli. Colorazione di una mappa. Formulazione di problemi CSP. Altri problemi
 Problemi di soddisfacimento di vincoli Maria Simi a.a. 2012/2013 Problemi di soddisfacimento di vincoli (CSP) Sono problemi con una struttura particolare, per cui conviene pensare ad algoritmi specializzati
Problemi di soddisfacimento di vincoli Maria Simi a.a. 2012/2013 Problemi di soddisfacimento di vincoli (CSP) Sono problemi con una struttura particolare, per cui conviene pensare ad algoritmi specializzati
In questa lezione Strutture dati elementari: Pila Coda Loro uso nella costruzione di algoritmi.
 In questa lezione Strutture dati elementari: Pila Coda Loro uso nella costruzione di algoritmi. 1 strutture dati (astratte) Una struttura dati astratti consiste di uno o più insiemi con delle operazioni
In questa lezione Strutture dati elementari: Pila Coda Loro uso nella costruzione di algoritmi. 1 strutture dati (astratte) Una struttura dati astratti consiste di uno o più insiemi con delle operazioni
Intelligenza Artificiale. Ricerca euristica L algoritmo A*
 Intelligenza Artificiale Ricerca euristica L algoritmo A* Marco Piastra Ricerca euristica - Ricerca non informata Ricerca nello spazio degli stati Definizione di un grafo come spazio degli stati I nodi
Intelligenza Artificiale Ricerca euristica L algoritmo A* Marco Piastra Ricerca euristica - Ricerca non informata Ricerca nello spazio degli stati Definizione di un grafo come spazio degli stati I nodi
Ambienti più realistici. Ricerca online. Azioni non deterministiche L aspirapolvere imprevedibile. Soluzioni più complesse. Alberi di ricerca AND-OR
 Ambienti più realistici Ricerca online Maria Simi a.a. 2011/2012 Gli agenti risolutori di problemi classici assumono: Ambienti completamente osservabili e deterministici il piano generato può essere generato
Ambienti più realistici Ricerca online Maria Simi a.a. 2011/2012 Gli agenti risolutori di problemi classici assumono: Ambienti completamente osservabili e deterministici il piano generato può essere generato
Alberi ed Alberi Binari
 Alberi ed Alberi Binari Il tipo di dato Albero Un albero è una struttura di data organizzata gerarchicamente. È costituito da un insieme di nodi collegati tra di loro: ogni nodo contiene dell informazione,
Alberi ed Alberi Binari Il tipo di dato Albero Un albero è una struttura di data organizzata gerarchicamente. È costituito da un insieme di nodi collegati tra di loro: ogni nodo contiene dell informazione,
2 OTTIMIZZAZIONE SU GRAFI. E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 2 OTTIMIZZAZIONE SU GRAFI E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Molti problemi decisionali possono essere formulati utilizzando il linguaggio della teoria dei grafi. Esempi: - problemi di
2 OTTIMIZZAZIONE SU GRAFI E. Amaldi Fondamenti di R.O. Politecnico di Milano 1 Molti problemi decisionali possono essere formulati utilizzando il linguaggio della teoria dei grafi. Esempi: - problemi di
Algoritmi e giochi combinatori
 Algoritmi e giochi combinatori Panoramica Giochi combinatori Programmi che giocano Albero di un gioco L algoritmo Minimax 1 Perché studiare i giochi? Problemi che coinvolgono agenti in competizione tra
Algoritmi e giochi combinatori Panoramica Giochi combinatori Programmi che giocano Albero di un gioco L algoritmo Minimax 1 Perché studiare i giochi? Problemi che coinvolgono agenti in competizione tra
Tipi di dato e Strutture dati elementari
 Tipi di dato e Strutture dati elementari Ing. Paolo Craca Anno accademico 2007/2008 Tipi di dato e Strutture dati elementari 1 / 40 Cosa vedremo in questo seminario 1 Introduzione 2 Pile 3 Code 4 5 Bibliografia
Tipi di dato e Strutture dati elementari Ing. Paolo Craca Anno accademico 2007/2008 Tipi di dato e Strutture dati elementari 1 / 40 Cosa vedremo in questo seminario 1 Introduzione 2 Pile 3 Code 4 5 Bibliografia
Generare sequenze di azioni.
 Cercare soluzioni L idea è quella di mantenere ed estendere un insieme di sequenze soluzioni parziali. Un agente con diverse opzioni immediate di esito sconosciuto può decidere cosa fare esaminando prima
Cercare soluzioni L idea è quella di mantenere ed estendere un insieme di sequenze soluzioni parziali. Un agente con diverse opzioni immediate di esito sconosciuto può decidere cosa fare esaminando prima
Intelligenza Artificiale. Problem Solving -Agenti risolutori di problemi
 Intelligenza Artificiale Problem Solving -Agenti risolutori di problemi Ragionare per cercare soluzioni Un problema viene risolto ricercandone la soluzione in un ampio spazio di possibili soluzioni. La
Intelligenza Artificiale Problem Solving -Agenti risolutori di problemi Ragionare per cercare soluzioni Un problema viene risolto ricercandone la soluzione in un ampio spazio di possibili soluzioni. La
Note per la Lezione 22 Ugo Vaccaro
 Progettazione di Algoritmi Anno Accademico 0 09 Note per la Lezione Ugo Vaccaro Nella lezione scorsa abbiamo introdotto la vista in ampiezza di grafi. Essenzialmente, esso è un metodo per esplorare in
Progettazione di Algoritmi Anno Accademico 0 09 Note per la Lezione Ugo Vaccaro Nella lezione scorsa abbiamo introdotto la vista in ampiezza di grafi. Essenzialmente, esso è un metodo per esplorare in
Intelligenza Artificiale Compito - 12 Marzo 2007
 Intelligenza Artificiale Compito - 1 Marzo 007 Nome e Cognome: Matricola: Nickname: ESERCIZIO N 1 Ricerca Informata A* 4 punti Stabilite se un euristica monotona permette ad A* di espandere sempre meno
Intelligenza Artificiale Compito - 1 Marzo 007 Nome e Cognome: Matricola: Nickname: ESERCIZIO N 1 Ricerca Informata A* 4 punti Stabilite se un euristica monotona permette ad A* di espandere sempre meno
2 Problemi di Ricerca
 Esercizio 2.1 Formalizzare come problema di ricerca il problema delle 8 regine. Esercizio 2.2 Analizzare l algoritmo di ricerca a lunghezza iterativa. Tale algoritmo incrementa iterativamente il limite
Esercizio 2.1 Formalizzare come problema di ricerca il problema delle 8 regine. Esercizio 2.2 Analizzare l algoritmo di ricerca a lunghezza iterativa. Tale algoritmo incrementa iterativamente il limite
Algoritmi e Strutture Dati
 Algoritmi e Strutture Dati Grafi e visite di grafi Fabio Patrizi 1 Grafo: definizione Un grafo G=(V,E) consiste in: - un insieme V di vertici (o nodi) - un insieme E di coppie di vertici, detti archi (o
Algoritmi e Strutture Dati Grafi e visite di grafi Fabio Patrizi 1 Grafo: definizione Un grafo G=(V,E) consiste in: - un insieme V di vertici (o nodi) - un insieme E di coppie di vertici, detti archi (o
Agenti basati su Ricerca: Introduzione
 Agenti basati su Ricerca: Introduzione Intelligenza Artificiale Prof. Alfonso E. Gerevini Dipartimento Ingegneria dell Informazione Università degli Studi di Brescia Un Agente Risolutore di Problemi Segue
Agenti basati su Ricerca: Introduzione Intelligenza Artificiale Prof. Alfonso E. Gerevini Dipartimento Ingegneria dell Informazione Università degli Studi di Brescia Un Agente Risolutore di Problemi Segue
Visite in Grafi BFS e DFS
 Visite in Grafi BFS e DFS Visita di un Grafo Obiettivo: Visitare una sola volta tutti i nodi del grafo. Es.: visitare un porzione del grafo del Web Difficoltà: Presenza di cicli: Marcare i nodi visitati
Visite in Grafi BFS e DFS Visita di un Grafo Obiettivo: Visitare una sola volta tutti i nodi del grafo. Es.: visitare un porzione del grafo del Web Difficoltà: Presenza di cicli: Marcare i nodi visitati
5.1 Metodo Branch and Bound
 5. Metodo Branch and Bound Si consideri il problema min{ c(x) : x X } Idea: Ricondurre la risoluzione di un problema difficile a quella di sottoproblemi più semplici effettuando una partizione (ricorsiva)
5. Metodo Branch and Bound Si consideri il problema min{ c(x) : x X } Idea: Ricondurre la risoluzione di un problema difficile a quella di sottoproblemi più semplici effettuando una partizione (ricorsiva)
Intelligenza Artificiale. Lezione 5. Sommario. Ricerca Best-first. Ricerca golosa. Russell & Norvig Capitolo 4, Paragrafi 1 2. Ricerca Best-first
 Sommario Russell & Norvig Capitolo 4, Paragrafi 1 2 Intelligenza Artificiale Ricerca Best-first Ricerca A Euristiche Lezione 5 IDA* SMA* Intelligenza Artificiale Daniele Nardi, 2004 Lezione 5 0 Intelligenza
Sommario Russell & Norvig Capitolo 4, Paragrafi 1 2 Intelligenza Artificiale Ricerca Best-first Ricerca A Euristiche Lezione 5 IDA* SMA* Intelligenza Artificiale Daniele Nardi, 2004 Lezione 5 0 Intelligenza
Problem-solving agents
 Problem-solving agents 1 Formulazione del problema :! lo stato iniziale;" Descrizione delle azioni possibili che sono disponibili da parte dell agente (operatori che trasformano uno stato in un altro o
Problem-solving agents 1 Formulazione del problema :! lo stato iniziale;" Descrizione delle azioni possibili che sono disponibili da parte dell agente (operatori che trasformano uno stato in un altro o
Esercitazione 8. Corso di Tecniche di programmazione. Laurea in Ingegneria Informatica
 Dipartimento di Informatica e Sistemistica Antonio Ruberti Sapienza Università di Roma Esercitazione 8 Corso di Tecniche di programmazione Laurea in Ingegneria Informatica (Canale di Ingegneria delle Reti
Dipartimento di Informatica e Sistemistica Antonio Ruberti Sapienza Università di Roma Esercitazione 8 Corso di Tecniche di programmazione Laurea in Ingegneria Informatica (Canale di Ingegneria delle Reti
Complementi di Algoritmi e Strutture Dati. Soluzioni prova scritta 7 giugno 2017
 Complementi di Algoritmi e Strutture Dati (III anno Laurea Triennale - a.a. 2016/17) Soluzioni prova scritta 7 giugno 2017 Esercizio Union find (punti 6) Considerare la foresta union-find sottostante e
Complementi di Algoritmi e Strutture Dati (III anno Laurea Triennale - a.a. 2016/17) Soluzioni prova scritta 7 giugno 2017 Esercizio Union find (punti 6) Considerare la foresta union-find sottostante e
Esercizi Capitolo 11 - Strutture di dati e progettazione di algoritmi
 Esercizi Capitolo 11 - Strutture di dati e progettazione di algoritmi Alberto Montresor 19 Agosto, 2014 Alcuni degli esercizi che seguono sono associati alle rispettive soluzioni. Se il vostro lettore
Esercizi Capitolo 11 - Strutture di dati e progettazione di algoritmi Alberto Montresor 19 Agosto, 2014 Alcuni degli esercizi che seguono sono associati alle rispettive soluzioni. Se il vostro lettore
Il problema del commesso viaggiatore
 Il problema del commesso viaggiatore Mauro Passacantando Dipartimento di Informatica Largo B. Pontecorvo 3, Pisa mpassacantando@di.unipi.it M. Passacantando TFA 2012/13 - Corso di Ricerca Operativa Università
Il problema del commesso viaggiatore Mauro Passacantando Dipartimento di Informatica Largo B. Pontecorvo 3, Pisa mpassacantando@di.unipi.it M. Passacantando TFA 2012/13 - Corso di Ricerca Operativa Università
Agenti basati su Ricerca: Introduzione
 Agenti basati su Ricerca: Introduzione Intelligenza Artificiale Prof. Alfonso E. Gerevini Dipartimento Ingegneria dell Informazione Università degli Studi di Brescia 1 Un Agente Risolutore di Problemi
Agenti basati su Ricerca: Introduzione Intelligenza Artificiale Prof. Alfonso E. Gerevini Dipartimento Ingegneria dell Informazione Università degli Studi di Brescia 1 Un Agente Risolutore di Problemi
LE STRUTTURE DATI DINAMICHE: GLI ALBERI. Cosimo Laneve
 LE STRUTTURE DATI DINAMICHE: GLI ALBERI Cosimo Laneve 1 argomenti 1. definizione di alberi e nozioni relative 2. implementazione degli alberi, creazione, visita 3. algoritmo di visita iterativa e sua implementazione
LE STRUTTURE DATI DINAMICHE: GLI ALBERI Cosimo Laneve 1 argomenti 1. definizione di alberi e nozioni relative 2. implementazione degli alberi, creazione, visita 3. algoritmo di visita iterativa e sua implementazione
Intelligenza Artificiale. Metodi di ricerca
 Intelligenza Artificiale Metodi di ricerca Marco Piastra Metodi di ricerca - 1 Ricerca nello spazio degli stati (disegno di J.C. Latombe) I nodi rappresentano uno stato Gli archi (orientati) una transizione
Intelligenza Artificiale Metodi di ricerca Marco Piastra Metodi di ricerca - 1 Ricerca nello spazio degli stati (disegno di J.C. Latombe) I nodi rappresentano uno stato Gli archi (orientati) una transizione
Problemi di ordinamento
 Problemi di ordinamento Input: una sequenza di n numeri a 1, a 2,..., a n ; Output: una permutazione a 1, a 2,..., a n di a 1, a 2,..., a n tale che a 1 a 2... a n. Generalmente, la sequenza è rappresentata
Problemi di ordinamento Input: una sequenza di n numeri a 1, a 2,..., a n ; Output: una permutazione a 1, a 2,..., a n di a 1, a 2,..., a n tale che a 1 a 2... a n. Generalmente, la sequenza è rappresentata
Note per la Lezione 4 Ugo Vaccaro
 Progettazione di Algoritmi Anno Accademico 2016 2017 Note per la Lezione 4 Ugo Vaccaro Ripasso di nozioni su Alberi Ricordiamo che gli alberi rappresentano una generalizzazione delle liste, nel senso che
Progettazione di Algoritmi Anno Accademico 2016 2017 Note per la Lezione 4 Ugo Vaccaro Ripasso di nozioni su Alberi Ricordiamo che gli alberi rappresentano una generalizzazione delle liste, nel senso che
Grafi: visita generica
 .. Grafi: visita generica Una presentazione alternativa (con ulteriori dettagli) Algoritmi di visita Scopo: visitare tutti i vertici di un grafo (si osservi che per poter visitare un vertice occorre prima
.. Grafi: visita generica Una presentazione alternativa (con ulteriori dettagli) Algoritmi di visita Scopo: visitare tutti i vertici di un grafo (si osservi che per poter visitare un vertice occorre prima
Laboratorio di Algoritmi
 Laboratorio di Algoritmi Corso di Laurea in Matematica Roberto Cordone DI - Università degli Studi di Milano Lezioni: Martedì 8.30-10.30 in aula 3 Mercoledì 10.30-13.30 in aula 2 Giovedì 15.30-18.30 in
Laboratorio di Algoritmi Corso di Laurea in Matematica Roberto Cordone DI - Università degli Studi di Milano Lezioni: Martedì 8.30-10.30 in aula 3 Mercoledì 10.30-13.30 in aula 2 Giovedì 15.30-18.30 in
K 4 è planare? E K 3,3 e K 5 sono planari? Sì! No! (Teorema di Kuratowski) K 5. Camil Demetrescu, Irene Finocchi, Giuseppe F.
 K 5. Camil Demetrescu, Irene Finocchi, Giuseppe F.") K 4 è planare? Sì! E K 3,3 e K 5 sono planari? K 5 No! (Teorema di Kuratowski) 1 Un albero è un grafo bipartito? SÌ! Ma un grafo bipartito è sempre un albero?? 2 Algoritmi e Strutture Dati Capitolo 11
K 4 è planare? Sì! E K 3,3 e K 5 sono planari? K 5 No! (Teorema di Kuratowski) 1 Un albero è un grafo bipartito? SÌ! Ma un grafo bipartito è sempre un albero?? 2 Algoritmi e Strutture Dati Capitolo 11
Strutture dati per rappresentare grafi
 lgoritmi e strutture dati amil emetrescu, Irene inocchi, iuseppe. Italiano Strutture dati per rappresentare grafi opyright 2004 - The Mcraw - Hill ompanies, srl lgoritmi e strutture dati amil emetrescu,
lgoritmi e strutture dati amil emetrescu, Irene inocchi, iuseppe. Italiano Strutture dati per rappresentare grafi opyright 2004 - The Mcraw - Hill ompanies, srl lgoritmi e strutture dati amil emetrescu,
Intelligenza Artificiale. Lezione 14. Intelligenza Artificiale Daniele Nardi, 2003 Lezione 14 0
 Intelligenza Artificiale Lezione 14 Intelligenza Artificiale Daniele Nardi, 2003 Lezione 14 0 Sommario Russell & Norvig Capitolo 4, Paragrafi 3 4 IDA* SMA* Ricerca Hill-climbing Simulated annealing Intelligenza
Intelligenza Artificiale Lezione 14 Intelligenza Artificiale Daniele Nardi, 2003 Lezione 14 0 Sommario Russell & Norvig Capitolo 4, Paragrafi 3 4 IDA* SMA* Ricerca Hill-climbing Simulated annealing Intelligenza
csp & backtracking informatica e laboratorio di programmazione Alberto Ferrari Informatica e Laboratorio di Programmazione
 csp & backtracking informatica e laboratorio di programmazione Alberto Ferrari Informatica e Laboratorio di Programmazione CSP (Constraint Satisfaction Problem) o CSP = problemi di soddisfacimento di vincoli
csp & backtracking informatica e laboratorio di programmazione Alberto Ferrari Informatica e Laboratorio di Programmazione CSP (Constraint Satisfaction Problem) o CSP = problemi di soddisfacimento di vincoli
Algoritmi e Strutture di Dati II 2. Visite di grafi
 Algoritmi e Strutture di Dati II 2 Visite di grafi Gli algoritmi di visita di un grafo hanno come obiettivo l esploraione di tutti i nodi e gli archi del grafo. Vi sono due modi principali per esplorare
Algoritmi e Strutture di Dati II 2 Visite di grafi Gli algoritmi di visita di un grafo hanno come obiettivo l esploraione di tutti i nodi e gli archi del grafo. Vi sono due modi principali per esplorare
Grafi: visite. Una breve presentazione. F. Damiani - Alg. & Lab. 04/05 (da C. Demetrescu et al - McGraw-Hill)
") Grafi: visite Una breve presentazione Visite di grafi Scopo e tipi di visita Una visita (o attraversamento) di un grafo G permette di esaminare i nodi e gli archi di G in modo sistematico Problema di base
Grafi: visite Una breve presentazione Visite di grafi Scopo e tipi di visita Una visita (o attraversamento) di un grafo G permette di esaminare i nodi e gli archi di G in modo sistematico Problema di base
2.3.3 Cammini ottimi nei grafi senza circuiti
 .. Cammini ottimi nei grafi senza circuiti Sia un grafo G = (N, A) orientato senza circuiti e una funzione di costo che assegna un valore c ij R ad ogni arco (i, j) A circuito Proprietà I nodi di un grafo
.. Cammini ottimi nei grafi senza circuiti Sia un grafo G = (N, A) orientato senza circuiti e una funzione di costo che assegna un valore c ij R ad ogni arco (i, j) A circuito Proprietà I nodi di un grafo
Intelligenza Artificiale
 Intelligenza Artificiale 17 Marzo 2005 Nome e Cognome: Matricola: ESERCIZIO N 1 Ricerca Cieca 5 punti 1.A) Elencare in modo ordinato i nodi (dell'albero sotto) che vengono scelti per l'espansione dalle
Intelligenza Artificiale 17 Marzo 2005 Nome e Cognome: Matricola: ESERCIZIO N 1 Ricerca Cieca 5 punti 1.A) Elencare in modo ordinato i nodi (dell'albero sotto) che vengono scelti per l'espansione dalle
Grafi non orientati. Grafi (non orientati) Rappresentazione di Grafi: matrice delle adiacenze. Tipiche applicazioni di modelli basati su grafi
 Rappresentazione di Grafi: matrice delle adiacenze. Tipiche applicazioni di modelli basati su grafi") Grafi non orientati Grafi (non orientati) Notazione. G = (V, E) V = nodi (o vertici). E = archi (o lati) tra coppie di nodi. Modella relazioni definite tra coppie di oggetti. aglia di un grafo: numero
Grafi non orientati Grafi (non orientati) Notazione. G = (V, E) V = nodi (o vertici). E = archi (o lati) tra coppie di nodi. Modella relazioni definite tra coppie di oggetti. aglia di un grafo: numero
LABORATORIO DI ALGORITMI E STRUTTURE DATI A-L. Ingegneria e scienze informatiche Cesena A.A: 2016/2017 Docente: Greta Sasso
 LABORATORIO DI ALGORITMI E STRUTTURE DATI A-L Ingegneria e scienze informatiche Cesena A.A: 2016/2017 Docente: Greta Sasso Grafi Un grafo è una struttura definita come un insieme di nodi (o vertici) che
LABORATORIO DI ALGORITMI E STRUTTURE DATI A-L Ingegneria e scienze informatiche Cesena A.A: 2016/2017 Docente: Greta Sasso Grafi Un grafo è una struttura definita come un insieme di nodi (o vertici) che
Algoritmi e Strutture Dati. Capitolo 3 Strutture dati elementari
 Algoritmi e Strutture Dati Capitolo 3 Strutture dati elementari Gestione di collezioni di oggetti Tipo di dato: Specifica una collezione di oggetti e delle operazioni di interesse su tale collezione (es.
Algoritmi e Strutture Dati Capitolo 3 Strutture dati elementari Gestione di collezioni di oggetti Tipo di dato: Specifica una collezione di oggetti e delle operazioni di interesse su tale collezione (es.
Code a priorità. Progettazione di Algoritmi Matricole congrue a 1. Docente: Annalisa De Bonis
 Code a priorità Progettazione di Algoritmi 2018-19 Matricole congrue a 1 Docente: Annalisa De Bonis 26 Coda a priorità Una coda a priorità è un collezione di elementi a ciascuno dei quali è assegnata una
Code a priorità Progettazione di Algoritmi 2018-19 Matricole congrue a 1 Docente: Annalisa De Bonis 26 Coda a priorità Una coda a priorità è un collezione di elementi a ciascuno dei quali è assegnata una
Problemi di soddisfacimento di vincoli. Maria Simi a.a. 2015/2016
 Problemi di soddisfacimento di vincoli Maria Simi a.a. 2015/2016 Problemi di soddisfacimento di vincoli (CSP) Sono problemi con una struttura particolare, per cui conviene pensare ad algoritmi specializzati
Problemi di soddisfacimento di vincoli Maria Simi a.a. 2015/2016 Problemi di soddisfacimento di vincoli (CSP) Sono problemi con una struttura particolare, per cui conviene pensare ad algoritmi specializzati
Note per la Lezione 21 Ugo Vaccaro
 Progettazione di Algoritmi Anno Accademico 20 20 Note per la Lezione 2 Ugo Vaccaro In questa lezione introdurremo il concetto di grafo, esamineremo le loro più comuni rappresentazioni ed introdurremo i
Progettazione di Algoritmi Anno Accademico 20 20 Note per la Lezione 2 Ugo Vaccaro In questa lezione introdurremo il concetto di grafo, esamineremo le loro più comuni rappresentazioni ed introdurremo i
Soluzioni della settima esercitazione di Algoritmi 1
 Soluzioni della settima esercitazione di Algoritmi 1 Beniamino Accattoli 19 dicembre 2007 1 Grafi Un grafo è non orientato se descrivendo un arco come una coppia di vertici (i,j) l ordine è ininfluente
Soluzioni della settima esercitazione di Algoritmi 1 Beniamino Accattoli 19 dicembre 2007 1 Grafi Un grafo è non orientato se descrivendo un arco come una coppia di vertici (i,j) l ordine è ininfluente
Esercitazione 6 Algorithmi e Strutture Dati (Informatica) A.A 2015/2016
 A.A 2015/2016") Esercitazione 6 Algorithmi e Strutture Dati (Informatica) A.A 2015/2016 Tong Liu April 14, 2016 Elementi Fondamentali Rappresentazione n = V numero di vertici (nodi) m = E numero di archi Matrice di adiacenza:
Esercitazione 6 Algorithmi e Strutture Dati (Informatica) A.A 2015/2016 Tong Liu April 14, 2016 Elementi Fondamentali Rappresentazione n = V numero di vertici (nodi) m = E numero di archi Matrice di adiacenza:
Algoritmi e Strutture Dati
 Algoritmi e Strutture Dati Grafi e visite di grafi Domenico Fabio Savo 1 Grafo: definizione Un grafo G=(V,E) consiste in: - un insieme V di vertici (o nodi) - un insieme E di coppie di vertici, detti archi
Algoritmi e Strutture Dati Grafi e visite di grafi Domenico Fabio Savo 1 Grafo: definizione Un grafo G=(V,E) consiste in: - un insieme V di vertici (o nodi) - un insieme E di coppie di vertici, detti archi
Problemi, istanze, soluzioni
 lgoritmi e Strutture di Dati II 2 Problemi, istanze, soluzioni Un problema specifica una relazione matematica tra dati di ingresso e dati di uscita. Una istanza di un problema è formata dai dati di un
lgoritmi e Strutture di Dati II 2 Problemi, istanze, soluzioni Un problema specifica una relazione matematica tra dati di ingresso e dati di uscita. Una istanza di un problema è formata dai dati di un
PLANNING LINEARE FORWARD. Esercizio in Prolog
 PLANNING LINEARE FORWARD Esercizio in Prolog 1 Prendiamo l esempio noto come anomalia di Sussman: Stato iniziale: Planning lineare in Prolog c" b a " Stato finale: a " b" c " 2 Stato Per rappresentare
PLANNING LINEARE FORWARD Esercizio in Prolog 1 Prendiamo l esempio noto come anomalia di Sussman: Stato iniziale: Planning lineare in Prolog c" b a " Stato finale: a " b" c " 2 Stato Per rappresentare
n n 1 n = > Il calcolo del fattoriale La funzione fattoriale, molto usata nel calcolo combinatorio, è così definita
 Il calcolo del fattoriale La funzione fattoriale, molto usata nel calcolo combinatorio, è così definita n! = 1 n( n 1)! se se n n = > 0 0 dove n è un numero intero non negativo Il calcolo del fattoriale
Il calcolo del fattoriale La funzione fattoriale, molto usata nel calcolo combinatorio, è così definita n! = 1 n( n 1)! se se n n = > 0 0 dove n è un numero intero non negativo Il calcolo del fattoriale
Il vettore e la lista concatenate (o catena) sono due esempi di strutture interne.
 sono due esempi di strutture interne.") Strutture dati PILA e CODA Le strutture dati si dividono in interne e astratte. Quelle astratte sono rappresentazioni dei dati di un problema che rispecchiano le proprietà dei dati e le relazioni usate
Strutture dati PILA e CODA Le strutture dati si dividono in interne e astratte. Quelle astratte sono rappresentazioni dei dati di un problema che rispecchiano le proprietà dei dati e le relazioni usate
Esercitazione 7. Grafi. Rappresentazione e algoritmi di visita
 Esercitazione 7 Grafi Rappresentazione e algoritmi di visita Grafo G = (V,E) non orientato 1 1 G = (V,E) orientato 6 Rappresentazione Grafo G = (V,E) metodi standard per la rappresentazione Liste di adiacenza
Esercitazione 7 Grafi Rappresentazione e algoritmi di visita Grafo G = (V,E) non orientato 1 1 G = (V,E) orientato 6 Rappresentazione Grafo G = (V,E) metodi standard per la rappresentazione Liste di adiacenza
tipi di dato astratti
 tipi di dato astratti liste pile code alberi grafi Alberto Ferrari Informatica ADT o un tipo di dato astratto o ADT (Abstract Data Type) è un tipo di dato le cui istanze possono essere manipolate con modalità
tipi di dato astratti liste pile code alberi grafi Alberto Ferrari Informatica ADT o un tipo di dato astratto o ADT (Abstract Data Type) è un tipo di dato le cui istanze possono essere manipolate con modalità
Il tipo astratto coda con priorità: specifiche sintattiche e semantiche. Realizzazioni.
 Il tipo astratto coda con priorità: specifiche sintattiche e semantiche. Realizzazioni. Algoritmi e Strutture Dati + Lab A.A. 14/15 Informatica Università degli Studi di Bari Aldo Moro Nicola Di Mauro
Il tipo astratto coda con priorità: specifiche sintattiche e semantiche. Realizzazioni. Algoritmi e Strutture Dati + Lab A.A. 14/15 Informatica Università degli Studi di Bari Aldo Moro Nicola Di Mauro
Alberi binari: definizione e alcune proprietà
 Alberi binari: definizione e alcune proprietà Alberi binari Un albero binario è un albero con radice in cui ogni nodo ha al più due figli. In maniera più formale: Definizione. (Alberi binari) Un albero
Alberi binari: definizione e alcune proprietà Alberi binari Un albero binario è un albero con radice in cui ogni nodo ha al più due figli. In maniera più formale: Definizione. (Alberi binari) Un albero
Algoritmi e Strutture Dati. Capitolo 3 Strutture dati elementari
 lgoritmi e Strutture Dati Capitolo 3 Strutture dati elementari Gestione di collezioni di oggetti Tipo di dato: Specifica una collezione di oggetti e delle operazioni di interesse su tale collezione (es.
lgoritmi e Strutture Dati Capitolo 3 Strutture dati elementari Gestione di collezioni di oggetti Tipo di dato: Specifica una collezione di oggetti e delle operazioni di interesse su tale collezione (es.
Problema dell albero di cammini minimi (SPT, Shortest Path Tree) o problema dei cammini minimi :
 o problema dei cammini minimi :") Per almeno una delle soluzioni ottime { P i, i r } del problema generalizzato, l unione dei cammini P i forma un albero di copertura per G radicato in r e orientato, ossia un albero la cui radice è r i
Per almeno una delle soluzioni ottime { P i, i r } del problema generalizzato, l unione dei cammini P i forma un albero di copertura per G radicato in r e orientato, ossia un albero la cui radice è r i
Intelligenza artificiale
 Intelligenza artificiale Appunti NON UFFICIALI del corso del prof. Francesco Amigoni Politecnico di Milano Marcello Pogliani marcello.pogliani - at - gmail - dot - com A.A. 2012 2013 Questo documento raccoglie
Intelligenza artificiale Appunti NON UFFICIALI del corso del prof. Francesco Amigoni Politecnico di Milano Marcello Pogliani marcello.pogliani - at - gmail - dot - com A.A. 2012 2013 Questo documento raccoglie
Il passo del gambero. Nel labirinto. Nel labirinto. La soluzione di problemi con la tecnica del Backtracking
 Il passo del gambero La soluzione di problemi con la tecnica del Backtracking In ogni posizione provo sistematicamente tutte le strade, ricordando ogni volta l ultima scelta compiuta Ordine in cui tenteremo
Il passo del gambero La soluzione di problemi con la tecnica del Backtracking In ogni posizione provo sistematicamente tutte le strade, ricordando ogni volta l ultima scelta compiuta Ordine in cui tenteremo
Ricerca euristica. Alessio Micheli a.a. 2015/2016. Credits: Maria Simi Russell-Norvig
 Ricerca euristica Alessio Micheli a.a. 2015/2016 Credits: Maria Simi Russell-Norvig Ricerca euristica La ricerca esaustiva non è praticabile in problemi di complessità esponenziale Noi usiamo conoscenza
Ricerca euristica Alessio Micheli a.a. 2015/2016 Credits: Maria Simi Russell-Norvig Ricerca euristica La ricerca esaustiva non è praticabile in problemi di complessità esponenziale Noi usiamo conoscenza
Algoritmi e Strutture Dati
 Introduzione ai grafi Grafi: Definizione e Algoritmi di visita Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino A.A. 2007/08 Introduzione ai
Introduzione ai grafi Grafi: Definizione e Algoritmi di visita Maria Rita Di Berardini, Emanuela Merelli 1 1 Dipartimento di Matematica e Informatica Università di Camerino A.A. 2007/08 Introduzione ai
1 TEORIA DELLE RETI 1. 1 Teoria delle reti. 1.1 Grafi
 1 TEORIA DELLE RETI 1 1 Teoria delle reti 1.1 Grafi Intuitivamente un grafo è un insieme finito di punti (nodi o vertici) ed un insieme di frecce (archi) che uniscono coppie di punti Il verso della freccia
1 TEORIA DELLE RETI 1 1 Teoria delle reti 1.1 Grafi Intuitivamente un grafo è un insieme finito di punti (nodi o vertici) ed un insieme di frecce (archi) che uniscono coppie di punti Il verso della freccia
Linguaggi e Grammatiche Liberi da Contesto
 N.Fanizzi-V.Carofiglio Dipartimento di Informatica Università degli Studi di Bari 22 aprile 2016 1 Linguaggi Liberi da Contesto 2 Grammatiche e Linguaggi Liberi da Contesto G = (X, V, S, P) è una grammatica
N.Fanizzi-V.Carofiglio Dipartimento di Informatica Università degli Studi di Bari 22 aprile 2016 1 Linguaggi Liberi da Contesto 2 Grammatiche e Linguaggi Liberi da Contesto G = (X, V, S, P) è una grammatica
Risoluzione automatica di problemi Prolem solving Architetture di agente Progetto di agenti basati su obiettivi basati su riflessi semplici
 isoluzione automatica di problemi Prolem solving Intelligenza Artificiale sommario(ussell&norvig Cap. 3) Agenti risolutori di problemi ezione 3 Tipi di problemi Formulazione del problema Esempi di problemi
isoluzione automatica di problemi Prolem solving Intelligenza Artificiale sommario(ussell&norvig Cap. 3) Agenti risolutori di problemi ezione 3 Tipi di problemi Formulazione del problema Esempi di problemi
2.3 Cammini ottimi. E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 . Cammini ottimi E. Amaldi Fondamenti di R.O. Politecnico di Milano .. Cammini minimi e algoritmo di Dijkstra Dato un grafo orientato G = (N, A) con una funzione di costo c : A c ij R e due nodi s e t,
. Cammini ottimi E. Amaldi Fondamenti di R.O. Politecnico di Milano .. Cammini minimi e algoritmo di Dijkstra Dato un grafo orientato G = (N, A) con una funzione di costo c : A c ij R e due nodi s e t,
LABORATORIO DI PROGRAMMAZIONE 2 Corso di laurea in matematica. Algoritmi ricorsivi
 LABORATORIO DI PROGRAMMAZIONE 2 Corso di laurea in matematica Marco Lapegna Dipartimento di Matematica e Applicazioni Universita degli Studi di Napoli Federico II wpage.unina.it/lapegna Partiamo da un
LABORATORIO DI PROGRAMMAZIONE 2 Corso di laurea in matematica Marco Lapegna Dipartimento di Matematica e Applicazioni Universita degli Studi di Napoli Federico II wpage.unina.it/lapegna Partiamo da un
Alberi di copertura. Mauro Passacantando. Dipartimento di Informatica Largo B. Pontecorvo 3, Pisa
 Alberi di copertura Mauro Passacantando Dipartimento di Informatica Largo B. Pontecorvo, Pisa mpassacantando@di.unipi.it M. Passacantando TFA 0/ - Corso di Ricerca Operativa Università di Pisa / 9 Definizioni
Alberi di copertura Mauro Passacantando Dipartimento di Informatica Largo B. Pontecorvo, Pisa mpassacantando@di.unipi.it M. Passacantando TFA 0/ - Corso di Ricerca Operativa Università di Pisa / 9 Definizioni
Algoritmi e Strutture Dati
 Algoritmi e Strutture Dati Esercitazione 7 Domenico Fabio Savo 1 Esercitazione: heap Abbiamo visto come utilizzare i MAX-HEAP nell'algoritmo di ordinamento heapsort che permette di ordinare un array di
Algoritmi e Strutture Dati Esercitazione 7 Domenico Fabio Savo 1 Esercitazione: heap Abbiamo visto come utilizzare i MAX-HEAP nell'algoritmo di ordinamento heapsort che permette di ordinare un array di
Alberi. Definizione, realizzazione e algoritmi elementari. Ugo de' Liguoro - Algoritmi e Sperimentazioni 03/04 - Lez. 7
 Alberi Definizione, realizzazione e algoritmi elementari Cosa sono gli alberi? Strutture gerarchiche di ogni tipo Generale Colonnello 1 Colonnello k Maggiore 1,1 Maggiore 1,m Capitano Maggiore k,1 Maggiore
Alberi Definizione, realizzazione e algoritmi elementari Cosa sono gli alberi? Strutture gerarchiche di ogni tipo Generale Colonnello 1 Colonnello k Maggiore 1,1 Maggiore 1,m Capitano Maggiore k,1 Maggiore
Algoritmi e Strutture Dati. Capitolo 4 Ordinamento: Selection e Insertion Sort
 Algoritmi e Strutture Dati Capitolo 4 Ordinamento: Selection e Insertion Sort Ordinamento Dato un insieme S di n elementi presi da un dominio totalmente ordinato, ordinare S in ordine non crescente o non
Algoritmi e Strutture Dati Capitolo 4 Ordinamento: Selection e Insertion Sort Ordinamento Dato un insieme S di n elementi presi da un dominio totalmente ordinato, ordinare S in ordine non crescente o non
Heap e code di priorità
 Heap e code di priorità Violetta Lonati Università degli studi di Milano Dipartimento di Scienze dell Informazione Laboratorio di algoritmi e strutture dati Corso di laurea in Informatica AA 2009/2010
Heap e code di priorità Violetta Lonati Università degli studi di Milano Dipartimento di Scienze dell Informazione Laboratorio di algoritmi e strutture dati Corso di laurea in Informatica AA 2009/2010
Algoritmi e Strutture di Dati I 1. Algoritmi e Strutture di Dati I Massimo Franceschet http://www.sci.unich.it/ francesc
 Algoritmi e Strutture di Dati I 1 Algoritmi e Strutture di Dati I Massimo Franceschet http://www.sci.unich.it/ francesc Algoritmi e Strutture di Dati I 2 Grafo Un grafo G è una coppia (V, E) ove V è un
Algoritmi e Strutture di Dati I 1 Algoritmi e Strutture di Dati I Massimo Franceschet http://www.sci.unich.it/ francesc Algoritmi e Strutture di Dati I 2 Grafo Un grafo G è una coppia (V, E) ove V è un
Ricerca in uno spazio di stati (SEARCH)
") Ricerca in uno spazio di stati (SEARCH) DEFINIZIONE E CLASSIFICAZIONE DEI PROBLEMI ALGORITMI DI RICERCA Algoritmi ciechi Algoritmi euristici Algoritmi A*, IDA* Riferimenti : Stuart J. Russell, Peter Norvig
Ricerca in uno spazio di stati (SEARCH) DEFINIZIONE E CLASSIFICAZIONE DEI PROBLEMI ALGORITMI DI RICERCA Algoritmi ciechi Algoritmi euristici Algoritmi A*, IDA* Riferimenti : Stuart J. Russell, Peter Norvig
ESERCITAZIONI DI INTRODUZIONE AGLI ALGORITMI (A.A. 08/09)
") ESERCITAZIONI DI INTRODUZIONE AGLI ALGORITMI (A.A. 0/0) DISPENSA N. 6 Esercizi su alberi di ricerca e AVL Notazione: Per un albero T scriviamo T per indicare il numero dei nodi di T e h(t ) per indicare
ESERCITAZIONI DI INTRODUZIONE AGLI ALGORITMI (A.A. 0/0) DISPENSA N. 6 Esercizi su alberi di ricerca e AVL Notazione: Per un albero T scriviamo T per indicare il numero dei nodi di T e h(t ) per indicare
Ricerca euristica. Funzioni di valutazione euristica. Esempi di euristica. Strategia best-first: esempio. Algoritmo di ricerca Best-First 03/03/15
 Ricerca euristica Ricerca euristica Maria Simi a.a. 2014/2015 La ricerca esaustiva non è praticabile in problemi di complessità esponenziale Noi usiamo conoscenza del problema ed esperienza per riconoscere
Ricerca euristica Ricerca euristica Maria Simi a.a. 2014/2015 La ricerca esaustiva non è praticabile in problemi di complessità esponenziale Noi usiamo conoscenza del problema ed esperienza per riconoscere
Algoritmi e Strutture dati Mod B. Grafi Percorsi Minimi: algoritmi esatti e algoritmi euristici (A*)
") Algoritmi e Strutture dati Mod B Grafi Percorsi Minimi: algoritmi esatti e algoritmi euristici (A*) Grafi: Percorsi minimi Un percorso minimo in un grafo G= grafo pesato orientato, con funzione di
Algoritmi e Strutture dati Mod B Grafi Percorsi Minimi: algoritmi esatti e algoritmi euristici (A*) Grafi: Percorsi minimi Un percorso minimo in un grafo G= grafo pesato orientato, con funzione di