ROBOCUP JR ITALIA 2012
|
|
|
- Tommasina Cavaliere
- 6 anni fa
- Visualizzazioni
Transcript
1
2 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE Della squadra TOP GUN Istituto LICEO SCIENTIFICO EUROPEO RAINERUM
3 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 3
4 La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica regolata dal D.P.R. 275/99 (art. 7) che permette alle scuole statali di operare sinergicamente per obiettivi condivisi e ritenuti importanti per l offerta formativa erogata all utenza. La Rete di scuole è nata sulla condivisione di una serie di principi EDUCATIVI e DIDATTICI riferiti alla realtà della scuola italiana. Questi principi e le conseguenti proposte operative erano stati riportati in un documento del maggio 2008 dal titolo: Manifesto per una RoboCupJr italiana - una proposta per la diffusione dell utilizzo didattico della Robotica nelle scuole a cura di Andrea Bonarini, Augusto Chioccariello e Giovanni Marcianò. Maggio 2008 L obiettivo della Rete organizzare l edizione italiana della Robocup Jr concretizza una spinta al confronto e alla collaborazione tra Istituti scolastici, elementi che motivano docenti e studenti all impegno nell innovazione, sia didattica che tecnologica, affrontando i problemi che costituiscono uno standard internazionale dal 2000, quando la Robocup (manifestazione riservata alle Università di tutto il mondo) ha proposto le tre gare per la scuola: Dance Rescue Soccer. La Robocup Jr ITALIA è Una manifestazione nazionale fondata di tre punti forti: 1. una struttura che cura l organizzazione e gestisce gli aspetti di organizzazione, promozione, svolgimento ai diversi livelli, regionali e nazionali; 2. un contenuto condiviso, ovvero regolamenti, formule di gara, supporto formativo e informativo ai partecipanti;
5 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 3. una documentazione delle proposte didattiche e del lavoro degli studenti che coinvolgono l uso di kit o robot auto costruiti per la partecipazione agli eventi organizzati dalla Rete. Questo volumetto appartiene alla collana di documentazione. Sul piano organizzativo e gestionale della Rete di scuole lo Statuto prevede organismi ben distinti ma fortemente integrati: COMITATO DI GESTIONE formato dai Dirigenti scolastici degli Istituti fondatori o associati alla Rete. Si riunisce due volte l anno in via ordinaria, e online per decisioni straordinarie. ISTITUTO CAPOFILA come previsto dal DPR 275/99 cura gli aspetti burocratici, amministrativi e contabili della Rete. Il Dirigente scolastico dell Istituto capofila è il legale rappresentante della Rete e provvede a dare esecuzione alle delibere del Comitato di Gestione. COMITATO TECNICO formato dai docenti referenti degli Istituti fondatori o associati alla Rete, provvede a definire il Bando e i Regolamenti di gara per la manifestazione annuale nazionale, trasmettendoli al Comitato di gestione che li deve approvare. COMITATO LOCALE - Cura l edizione annuale della manifestazione, ed è formato a cura del Istituto fondatore o associato a cui il Comitato di Gestione ha assegnato la cura dell evento. ISTITUTI PARTECIPANTI iscrivendosi alle gare, beneficiano del supporto della Rete ma non partecipano alle decisioni gestionali o tecniche. La partecipazione alla gara nazionale li rende idonei per aderire alla Rete. Diversamente serve il parere del Comitato Tecnico. 5
6 Jacopo Carrani Aaron Larcher Michele Mezzanato TOP GUN PARTECIPA ALLA GARA DI Robocup Rescue A Istituto LICEO SCIENTIFICO EUROPEO RAINERUM Classe 3B
7 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 7
8 CAP. 1 - DATI GENERALI I componenti della squadra sono tre ragazzi, nati nel 1995: Michele Mezzanato, residente a Laives (BZ), Aaron Larcher, residente a Bronzolo (BZ) e Jacopo Carrani, residente a Merano (BZ). Essi frequentano il Liceo Scientifico Rainerum di Bolzano. Il docente responsabile del progetto è il professor Stefano Monfalcon.
9 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE Tutto ebbe inizio quando l'affiatato trio composto da Aaron, Jacopo e Michele iniziò il suo lungo cammino attività della robotica, cioè quando essi frequentavano la classe prima. In particolare s'imbatterono in un progetto in cui i protagonisti erano i robot, i quali avevano come scopo l'interazione tra l'ambiente e l'essere umano. L'interesse per l'argomento e la sfida propostagli dal professore, li portò alla realizzazione di un robot che con la sua funzionalità, praticità e simpatia riscosse molto successo all'interno dell'istituto. Questo fu l'episodio che diede inizio all'inseparabile squadra di robotici in questione. Per quanto riguarda il nome della squadra, le origini sono più recenti. Fu proprio durante una noiosissima ed estenuante lezione di supplenza di tedesco, che a due componenti del trio (Jacopo e Michele) venne in mente di trovare un passatempo che risvegliasse la loro attenzione e, completamente disinteressati a ciò che la professoressa spiegava, si misero a progettare aeroplanini di carta, per poi destreggiarsi nel loro lancio dalla finestra. Arrivati al fatidico momento del decollo dell'ennesimo origami, si accorsero della presenza di un professore che, dal cortile, li stava osservando. Questi si apprestò ad avvertire la professoressa di matematica che assegnò ai ragazzi una severa punizione. La notizia dell'accaduto, come previsto, arrivò con celerità 9
10 all'orecchio del professore di fisica, il quale, con altrettanta rapidità, non perse l'occasione per divulgarla in tutto l'istituto, canzonando inoltre i tre ragazzi, Aaron compreso, chiamandoli col nome di Top Gun. Per la precisione i tre diventarono Goose (Michele), Maverick (Jacopo) e Iceman (Aaron). Qualche mese prima dell'inizio dell'anno scolastico 2011/12 venne proposto ai Top Gun di aderire, come ogni anno, ai progetti di robotica proposti dall'istituto e la risposta fu immediata, così al rientro i nostri ragazzi erano già all'opera. Nel dettaglio furono posti di fronte ad un bivio: proseguire con l'opzione 'robotica avanzata' o intraprendere una nuova strada: la Robocup. Mossi dalla curiosità e dalla voglia di avventurarsi in un'esperienza del tutto nuova, i tre ragazzi, si dedicarono quindi alla costruzione di un robot che avrebbe gareggiato a riva del Garda nella categoria 'Rescue A'. Le delusioni dovute ai mancati funzionamenti delle strutture impiegate (tre) furono molte e le fatiche altrettante, ma grazie ad un lavoro costante ed ai pochi ma essenziali consigli del professore la squadra dei Top Gun riuscì a terminare la costruzione di un robot agile e funzionale, il quale verrà in seguito descritto.
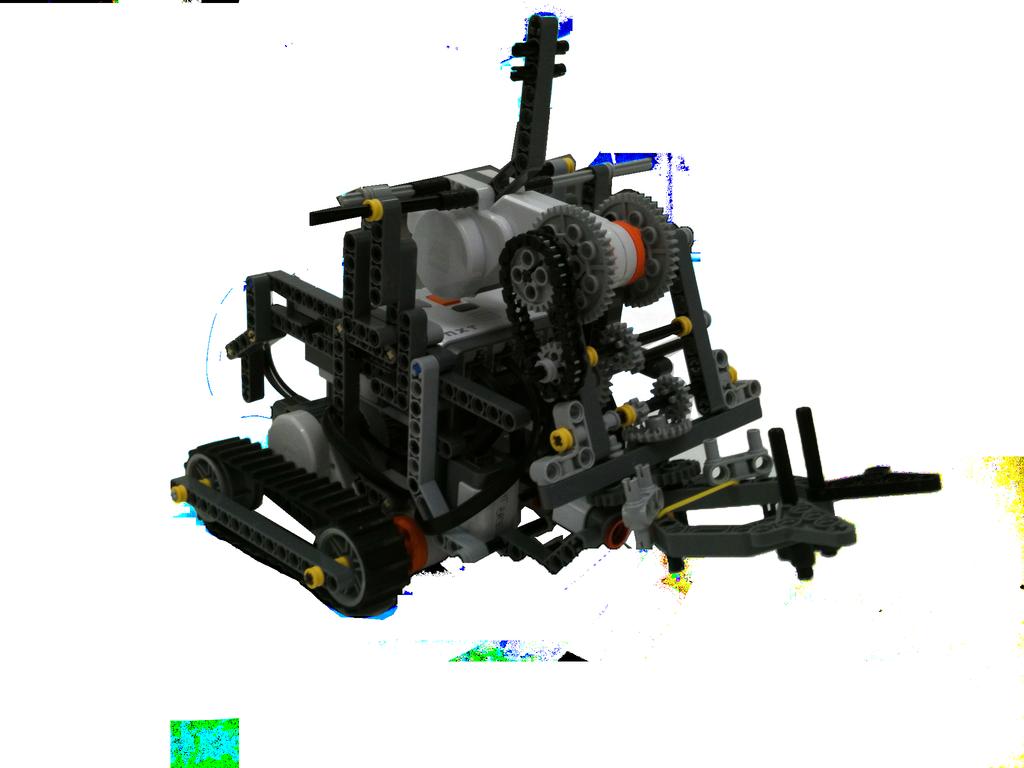
11 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE CAP. 3 NOME E STRUTTURA DEL ROBOT Il robot della squadra Top Gun prende il nome dall'aereo pilotato da Maverick, interpretato da Tom Cruise nel film "Top Gun", cioè "F-4 Phantom II". Nel corso della costruzione del robot la struttura, per problemi di peso, dimensioni e agilità è stata sottoposta a ben 3 grandi modifiche che hanno comportato la parziale distruzione, se non il totale smantellamento del robot (nel caso dell'ultimo cambiamento). Per questo, il nome del robot non è esattamente quello del caccia utilizzato dal talentuoso e giovane pilota americano: al posto del numero II, è stato deciso di porvi il numero III, segno che la versione finale si tratta della terza revisione. F- 4 Phantom III Per la costruzione del robot, sono stati utilizzati i seguenti materiali (Lego): - tre motori - due sensori di luminosità - un sensore di distanza - un sensore di colore - pezzi Lego Technic La struttura si basa su due cingoli, scelti per la grande stabilità che forniscono alla struttura del robot e per avere la maggior aderenza possibile in modo da permettere al robot di completare la salita ed arrivare così all'ultima stanza. 11
12 I sensori di luminosità sono stati posti sotto la tenaglia e tra le due ruote anteriori per permettere un maggiore controllo ed un'azione immediata da parte dei motori. We i motori fossero stati messi troppo avanti, il robot, nel momento in cui gli stessi avrebbero segnalato la presenza di una curva avrebbero azionato i motori effettuando la curva stessa troppo anticipatamente, mandando così il robot fuori dal tracciato. Il sensori ad ultrasuoni è stato posto al di sotto della tenaglia davanti ai sensori di luminosità per poter vedere gli oggetti ed aggirarli o per dare il segnale per raccogliere la lattina. Tutta la struttura del dell'androide non deve superare la grandezza di 25 centimetri sia in altezza sia il larghezza, altrimenti non sarebbe in grado di passare al di sotto le porte del percorso e all'interno del corridoio, situato tra le prime due stanze.
13 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE CAP. 4 MECCANICA Al contrario delle prime versioni, in quella definitiva è presente soltanto un mattoncino NXT. Il robot presenta una meccanica sobria e compatta, ma allo stesso tempo resistente. Per quanto riguarda il telaio, le sospensioni consistono in due barre di LEGO Technic a forma di lettera J che separano il mattoncino NXT dai due motori che consentono lo spostamento del robot e da due assi di sezione cruciforme posti sotto la parte posteriore del mattoncino stesso per conferirne stabilità. I sensori sono sostenuti dalla struttura formata dalle sopraccitate barra di LEGO Technic. Infine, per quanto riguarda lo spostamento, si è deciso di dotare il robot di cingoli, così da ottenere la maggiore aderenza possibile con il terreno. La tenaglia con la quale il robot deve alzare la vittima, è stata progettata utilizzando un motore posto sul mattone NTX nel quale è stata introdotta un'asse di sezione cruciforme alla quale è stata agganciata una struttura dotata di un sistema di ingranaggi atti ad aprire la tenaglia stessa tenuta chiusa da un elastico. Nella pagina seguente, alcune immagini che ritraggono il robot F-4 Phantom III. 13



14
15 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE CAP. 5 UNITÀ DI CONTROLLO L unità centrale che è stata adottata è un mattone NXT ( NXT brick ); esso può ricevere l input da un massimo di quattro sensori e controlla fino a tre motori elettrici, attraverso cavi RJ12. Il mattone ha un display LCD monocromatico (100x64px), e quattro pulsanti, utilizzati per navigare nell interfaccia utente; possiede anche un altoparlante in grado di riprodurre file sonori campionati a 8kHz. La corrente è fornita da una batteria ricaricabile Li-Ion. Specifiche tecniche: - microprocessore centrale a 32-bit 48MHz (256KB flash memory, 64KB RAM) - microcontroller a 8-bit 4MHz (4KB flash memory, 512Bytes RAM) - CSR BlueCore 4 Bluetooth 26MHz (Memoria flash esterna da 8MBit, 47KB RAM) - Display LCD con matrice da 100x64 pixel - Una porta USB 1.1 (12Mbit/s) - Connettività wireless Bluetooth (Classe II) - 4 porte di input - 3 porte di output Versione del firmware: Requisiti minimi di sistema: - Windows XP 15

16 - Mac OS X v Versioni di sistema raccomandate: - Windows 7 - Mac OS X v10.7.3

 - un")
 Sono tutti e quattro collegati all unità")
17 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE CAP. 6 SENSORI I sensori equipaggiati dal nostro robot sono i seguenti: - due sensori di luminosità (Lego Technic) - un sensore ad ultrasuoni (Lego Technic) - un sensore di colore (HiTechnic) Sono tutti e quattro collegati all unità centrale tramite cavi RJ12 (Lego Technic). 17



18 CAP. 7 ATTUATORI Gli attuatori impiegati sono i motori della LEGO dotati di encoder, di un sistema interno di demoltipliche che permettono di gestirne le rotazioni con una precisione di 1 ; un controllo PID permette inoltre di compensare spostamenti indesiderati dovuti all inerzia. Come si può vedere nelle immagini tratte dal sito: il motore della LEGO Mindstorms ha una struttura interna complessa.
 19-21 aprile REPORT DI")
19 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 19
20 CAP. 8 AMBIENTE DI SVILUPPO Come ambiente di sviluppo è stato utilizzato il programma Lego Mindstorms Edu NXT v2.1.f5. Il software è basato su LabView della National Instruments, e consente di utilizzare un linguaggio di programmazione visuale. Mindstorms Edu NXT fornisce un ambiente grafico semplice da usare grazie all utilizzo di un sistema drag and drop. Il programma contiene molteplici funzioni, dalle azioni più semplici, come il movimento dei motori, a funzioni più avanzate, come logiche e variabili. È stato scelto questo software innanzitutto in quanto è stato il primo ambiente di sviluppo con il quale siamo entrati in contatto e anche quello che conosciamo meglio, essendo gli altri a noi poco noti; oltretutto, grazie alla sua semplicità di visualizzazione, la sua comprensione è più immediata, a scapito, però, di una certa lentezza nel salvataggio, compilazione e scaricamento del programma, e alcuni rischi di crash del software con conseguente perdita di dati, soprattutto quando esso è molto pesante.


21 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 21

22 CAP. 9 IL PROGRAMMA SOFTWARE Il software è stato scritto, come detto sopra, con il programma Lego Mindstorms Edu NXT. Esso permette al robot di compiere tutte le azioni necessarie per completare la gara Rescue A. Per rendere la scrittura meno pesante e più ordinata, parti di programma (come, ad esempio, il seguilinea o la ricerca della lattina) sono state incluse in blocchi personalizzati, i quali compattano la scrittura. Di seguito verranno spiegate nel dettaglio le tre parti: seguilinea, aggiramento dell ostacolo e ricerca della lattina. Per quanto riguarda il seguilinea, l intero processo può essere riassunto in sei punti principali: 1) Il robot inizia una fase di taratura dei sensori di luce, durante la quale entrambi devono essere posizionati su una superficie bianca. Il dato rilevato dai due sensori viene registrato in una variabile ( bianco_1 per il sensore collegato alla porta 1, e bianco_4 per quello collegato alla porta 4).

23 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 2) Dopo questa procedura, comincia un ciclo (loop) condizionato al sensore di colore ( HiTechnic Color Sensor ). Nel ciclo vengono effettuati i vari controlli da parte dei sensori di luce. Il sensore di luce sinistro (porta 4) registra i dati relativi alla luminosità, che vengono confrontati con il dato scritto nella variabile bianco_4. La differenza tra il dato registrato nella variabile e quello rilevato dal sensore viene confrontata ad un intervallo compreso tra -5 e +5. 3) L intervallo è collegato ad un interruttore (switch) di tipo logico. Se il risultato è no (ciò significa, quindi, che il sensore sta rilevando il colore nero), allora, tramite i motori collegati alle porte A e C, il robot sterzerà verso sinistra; il robot uscirà dal ciclo quando la differenza tra la variabile bianco_4 e i dati rilevati dal sensore di luce 23
.")

24 sinistro sia compresa tra -5 e +5 (cioè fino a quando il sensore destro tornerà a rilevare il colore bianco). 4) Se il risultato è sì, viene effettuata la stessa procedura del punto 2, relativa però al sensore destro (porta 1).
, allora i motori procedono in avanti 0,3 secondi.")

25 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE 5) L intervallo è collegato ad un altro switch di tipo logico. Se il risultato è sì (e ciò indicherebbe che entrambi i sensori rilevano il colore bianco), allora i motori procedono in avanti 0,3 secondi. 6) Se il risultato è no, viene effettuata la stessa procedura del punto 3. Insieme al seguilinea, nel ciclo condizionato al sensore di colore è presente la funzione di aggiramento dell ostacolo. Il suo funzionamento è abbastanza semplice: quando il sensore a ultrasuoni rileva un oggetto ad una distanza minore di 5 centimetri, il robot si 25
 ad una distanza minore di 15 centimetri, il robot effettua una rotazione di 180 gradi verso destra ed attua la manovra di aggiramento; in caso")
26 ferma e si gira di 90 gradi verso sinistra; a questo punto effettua un controllo con il sensore ad ultrasuoni, per verificare che ci sia abbastanza spazio per attuare la manovra di aggiramento. Se rileva un oggetto (verosimilmente una parete) ad una distanza minore di 15 centimetri, il robot effettua una rotazione di 180 gradi verso destra ed attua la manovra di aggiramento; in caso contrario, il robot effettua la manovra di aggiramento dalla parte opposta.


27 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE Vicino: Lontano: Quando il programma esce dal ciclo condizionato al sensore di colore, significa che ha raggiunto l ultima stanza, in quanto il sensore rileva la linea di carta argentata posta all ingresso della terza stanza. A questo punto entra in gioco l ultima parte del programma, la ricerca della lattina. Una volta varcata la soglia della terza stanza, il robot si ferma e comincia a girare verso destra per un piccolissimo intervallo di tempo per volta, registrando ogni volta la distanza rilevata dal sensore ad ultrasuoni in una variabile, che verrà poi confrontata con la distanza rilevata subito dopo; se la differenza tra il valore della variabile e la distanza rilevata è molto grande, ciò significa che è stata vista la lattina. A questo punto, il robot continuerà a girarsi sino a quando non vedrà più la lattina; quindi, si girerà dalla parte opposta, e proseguirà in avanti sino a che il sensore ad ultrasuoni non rileverà una distanza minore di 5 centimetri. Il robot, quindi, 27


28 si fermerà, ed attiverà la tenaglia, tramite il terzo motore, la quale scenderà e afferrerà la lattina, alzandola poi a 3 centimetri dal terreno. In seguito, il robot procederà all indietro per tutta la superficie dell ultima stanza, fino a quando non troverà un area nera, grazie al sensore di colore. A questo punto, il robot girerà di 180 e lascerà la lattina sul piano nero.

29 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE CAP. 10 SORGENTE DI ALIMENTAZIONE Il robot, costruito con materiale della Lego e presenta le batterie standard di alimentazione, con 7,4V e tensione nominale pari a 1400mA La batteria utilizzata 29

30 APPENDICE In quest appendice finale, si tratteranno le varie modifiche strutturali e di programma che il robot ha subìto. Prima di tutto, analizzerò i cambiamenti di struttura. Le prime due versioni del robot erano molto diverse da quella attuale, come si può osservare dall immagine sottostante, che raffigura la seconda versione. Tra la prima e la seconda versione, non sussistevano molte differenze, a parte il fatto che, nella prima, i mattoncini NXT risultavano poco accessibili, e ciò implicava una notevole difficoltà nel cambiare le batterie, in caso di necessità.
31 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE Purtroppo, però, anche la seconda versione non nacque perfetta. Infatti, essa presentava molteplici difetti; ad esempio, per il suo funzionamento occorrevano ben due mattoncini NXT, in quanto la struttura della tenaglia era strutturata in modo diverso: era dotata di un carrello sul quale la pinza poteva scorrere; essa necessitava, quindi, di due mattoncini, perché per il suo corretto funzionamento erano richiesti due motori che, sommati ai due motori utilizzati per il movimento del robot, superavano il limite di tre motori collegabili ad un solo mattoncino. Quindi, nonostante questo sistema semplificasse molto la tenaglia, l uso di due cervelli era una grande scomodità, perché appesantiva e ingrandiva significativamente la struttura: ciò comportava quindi una riduzione dell agilità, maggiore difficoltà nel passare in mezzo alle porte (a causa delle grandi dimensioni), e, inoltre, il robot non riusciva a effettuare la salita. Un altro lato negativo di questa struttura era la scarsa accessibilità ad alcune parti, come i sensori di luce. Proprio per questo motivo, non siamo riusciti a portare a termine una pre-gara organizzata dalla nostra scuola e da alcuni istituti della nostra regione: a causa di un guasto ai sensori, il robot non era più in grado di seguire la linea, e non siamo riusciti a rimuoverli e sostituirli in tempo. Dopo questo fallimento, abbiamo deciso di smantellare completamente il nostro robot, e ricostruirne da zero uno nuovo. Così è nato, quindi, il F-4 Phantom III. Dotato di un solo cervello, è molto più compatto, agile e leggero. 31
32 Inoltre, abbiamo deciso di distanziare maggiormente i due sensori di luce l uno dall altro: in questo modo, è molto più improbabile che il robot perda il tracciato. Nonostante la presenza di questi lati positivi, c è tuttavia un elemento mancante in quest ultima versione, che però non poteva essere incluso nuovamente: la tenaglia a due motori. Infatti, dato che, utilizzando un solo mattoncino NXT, l unica possibilità per realizzare la tenaglia era quella di avere un solo motore, l impresa è stata molto più ardua. Tuttavia, grazie all utilizzo di vari ingranaggi e demoltipliche, siamo riusciti a realizzare una struttura soddisfacente. Per quanto riguarda la parte di programmazione, invece, il percorso è stato meno travagliato, ma abbiamo comunque affrontato diverse difficoltà, soprattutto per quanto riguarda la parte del segui linea, alla quale ci siamo dedicati per la maggior parte del tempo. Dopo vari tentativi, abbiamo scoperto, infatti, il sistema di auto taratura dei sensori: il robot registra in una variabile il dato che i sensori stanno rilevando in quel dato momento. In questo modo, non sarà necessario tarare i sensori in base alla percentuale di luminosità (da 0 a 100) che rilevano, e tutto il sistema è molto più accurato. Inoltre, per affrontare la salita, la vecchia versione del robot aveva bisogno di una spinta maggiore da parte dei motori, e ci eravamo posti il problema di come far riconoscere al robot che aveva intrapreso la salita. Inizialmente, avevamo pensato di includere

33 ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile REPORT DI DOCUMENTAZIONE un accelerometro, però, dato il limite di sensori massimo (quattro) collegabili al mattoncino, non abbiamo potuto realizzare quest idea; fortunatamente, la versione finale del robot è in grado di affrontare la salita con la stessa potenza dei motori di quando procede su una superficie piana: senza dubbio, un grande vantaggio. La versione finale F-4 Phantom III 33
34 INDICE P.8 - CAP. 1 - DATI GENERALI P.9 - CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE P.11 - CAP. 3 NOME E STRUTTURA DEL ROBOT P.13 - CAP. 4 MECCANICA P.15 - CAP. 5 UNITÀ DI CONTROLLO P.17 - CAP. 6 SENSORI P.18 - CAP. 7 ATTUATORI P.20 - CAP. 8 AMBIENTE DI SVILUPPO P.22 - CAP. 9 IL PROGRAMMA SOFTWARE P.29 - CAP.10 SORGENTE DI ALIMENTAZIONE P.30 - APPENDICE
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Report di documentazione delle squadre FerrariSusa_8 FerrariSusa_9 FerrariSusa_10 Istituto Enzo FERRARI di Susa (TO)
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Report di documentazione delle squadre FerrariSusa_8 FerrariSusa_9 FerrariSusa_10 Istituto Enzo FERRARI di Susa (TO)
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Squadra: TEXAS BOT Istituto: ITIS A.ROSSI La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Squadra: TEXAS BOT Istituto: ITIS A.ROSSI La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica
ROBOCUP JUNIOR. CATANIA, Aprile SenigalliaRobot. A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni
 ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
ROBOCUP JR ITALIA 2011 Catania aprile
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile REPORT DI DOCUMENTAZIONE Della squadra spelafili Istituto ITIS De Pretto di Schio ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile REPORT DI DOCUMENTAZIONE Della squadra spelafili Istituto ITIS De Pretto di Schio ROBOCUP JR ITALIA 2011 - Catania 14-16
ROBOCUP JR ITALIA Riva del Garda aprile
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Report di documentazione delle squadre FerrariSusa_11 FerrariSusa_12 FerrariSusa_13 Istituto Enzo FERRARI di Susa
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Report di documentazione delle squadre FerrariSusa_11 FerrariSusa_12 FerrariSusa_13 Istituto Enzo FERRARI di Susa
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra THE ENDLESS RUNNER Istituto ITT G. Chilesotti La Rete di scuole per
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra THE ENDLESS RUNNER Istituto ITT G. Chilesotti La Rete di scuole per
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra e-team_1 I.T.I.S. M.L. Cassata Gubbio (PG) ROBOCUP JR ITALIA 2012
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra e-team_1 I.T.I.S. M.L. Cassata Gubbio (PG) ROBOCUP JR ITALIA 2012
ROBOCUP JR ITALIA III EDIZIONE CATANIA 2011
 ROBOCUP JR ITALIA III EDIZIONE CATANIA 2011 REPORT DI DOCUMENTAZIONE IIS F. BOTTAZZI CASARANO(LE) FANTASY Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Della squadra:
ROBOCUP JR ITALIA III EDIZIONE CATANIA 2011 REPORT DI DOCUMENTAZIONE IIS F. BOTTAZZI CASARANO(LE) FANTASY Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Della squadra:
Lego Mindstorms NXT è un kit robotico programmabile rilasciato dalla Lego alla fine di Luglio 2006.
 Mindstorms NXT 2.0 Scritto da Prof. S. Giannitto - Amministratore 28/10/2010 Lego Mindstorms NXT è un kit robotico programmabile rilasciato dalla Lego alla fine di Luglio 2006. Rimpiazza il kit Lego Mindstorms
Mindstorms NXT 2.0 Scritto da Prof. S. Giannitto - Amministratore 28/10/2010 Lego Mindstorms NXT è un kit robotico programmabile rilasciato dalla Lego alla fine di Luglio 2006. Rimpiazza il kit Lego Mindstorms
ROBOCUP JR ITALIA RIVA DEL GARDA
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra MecInfo Istituto I.I.S. A.Volta ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile La
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra MecInfo Istituto I.I.S. A.Volta ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile La
CHI SIAMO.
 CHI SIAMO La Rete di scuole per la Robocup Jr ITALIA è nata nel novembre 2008 come espressione dell Autonomia scolastica (D.P.R. 275/99) che prevede che le scuole statali possano operare sinergicamente
CHI SIAMO La Rete di scuole per la Robocup Jr ITALIA è nata nel novembre 2008 come espressione dell Autonomia scolastica (D.P.R. 275/99) che prevede che le scuole statali possano operare sinergicamente
Introduzione alla robotica
 LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
sperimenta anche tu! A SCUOLA DI ROBOT STUDENTI Al Horany Mohammad, Ambrosini Alessandro, Bacco Gianmarco, Magagna Marilla DOCENTI
 S P E R I M E N T A N D O 2 0 1 0 sperimenta anche tu! A SCUOLA DI ROBOT STUDENTI Al Horany Mohammad, Ambrosini Alessandro, Bacco Gianmarco, Magagna Marilla DOCENTI Bubani Massimo, Sitta Elisa Istituto
S P E R I M E N T A N D O 2 0 1 0 sperimenta anche tu! A SCUOLA DI ROBOT STUDENTI Al Horany Mohammad, Ambrosini Alessandro, Bacco Gianmarco, Magagna Marilla DOCENTI Bubani Massimo, Sitta Elisa Istituto
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti!
 I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti! Pawel Jakub KOWALEWSKI IV a Elettronica & Telecomunicazioni 1 Robot 5 Minuti con kit Lego NXT MINDSTORMS
I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti! Pawel Jakub KOWALEWSKI IV a Elettronica & Telecomunicazioni 1 Robot 5 Minuti con kit Lego NXT MINDSTORMS
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA. TITOLO DEL PROGETTO: ipec
 FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
DOCUMENTAZIONE. Isovak Team. classe 3D Liceo Scientifico Tecnologico. IISS Galilei
 DOCUMENTAZIONE Isovak Team classe 3D Liceo Scientifico Tecnologico IISS Galilei Bolzano L'istituto L'istituto Galileo Galilei di Bolzano ( http://www.iisgalilei.bz.it/iisgalilei/ ) ha da sempre la sua
DOCUMENTAZIONE Isovak Team classe 3D Liceo Scientifico Tecnologico IISS Galilei Bolzano L'istituto L'istituto Galileo Galilei di Bolzano ( http://www.iisgalilei.bz.it/iisgalilei/ ) ha da sempre la sua
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012
 19-21 aprile 2012") ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012 REPORT DI DOCUMENTAZIONE DELLA SQUADRA Galileo Galilei s Robots and Mechanical Men Corporation del LICEO SCIENTIFICO GALILEO GALILEI VIALE BOLOGNINI,
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile 2012 REPORT DI DOCUMENTAZIONE DELLA SQUADRA Galileo Galilei s Robots and Mechanical Men Corporation del LICEO SCIENTIFICO GALILEO GALILEI VIALE BOLOGNINI,
ROBOCUP JR ITALIA 2015
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Ultrasonic Sensor Block
 Ultrasonic Sensor Block 1. Questo programma fa avanzare un robot fino a quando il sensore a ultrasuoni rileva qualcosa di più vicino a 35 cm, quindi il robot si ferma. Il programma utilizza il blocco Wait
Ultrasonic Sensor Block 1. Questo programma fa avanzare un robot fino a quando il sensore a ultrasuoni rileva qualcosa di più vicino a 35 cm, quindi il robot si ferma. Il programma utilizza il blocco Wait
I sistemi robotici Lego Mindstorms
 Prima parte: Luglio/Agosto 2007 Introduzione al sistema Seconda parte: Settembre 2007 La programmazione in NQC (I) Terza parte: Ottobre 2007 La programmazione in NQC (II) Quarta parte: Novembre 2007 La
Prima parte: Luglio/Agosto 2007 Introduzione al sistema Seconda parte: Settembre 2007 La programmazione in NQC (I) Terza parte: Ottobre 2007 La programmazione in NQC (II) Quarta parte: Novembre 2007 La
Rete di scuole per la ROBOCUP JR ITALIA. ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile
 aprile") Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Crinto Istituto : Itis De Pretto Schio La Rete di scuole per la
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Crinto Istituto : Itis De Pretto Schio La Rete di scuole per la
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo
 Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
Programma di Robotica[LEGO EV3]
![Programma di Robotica[LEGO EV3]](/thumbs/39/19338690.jpg "Programma di Robotica[LEGO EV3]") Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Politecnico di Milano
 Politecnico di Milano Facoltà di Ingegneria dell'informazione Corso di Laurea in Ingegneria Informatica Dipartimento di Elettronica, Informazione e Bioingegneria FCbot Manuale di Gioco Prof.ssa: Anna Maria
Politecnico di Milano Facoltà di Ingegneria dell'informazione Corso di Laurea in Ingegneria Informatica Dipartimento di Elettronica, Informazione e Bioingegneria FCbot Manuale di Gioco Prof.ssa: Anna Maria
Rete di scuole per la ROBOCUP JR ITALIA. ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
 19-21 aprile") Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) REPORT DI DOCUMENTAZIONE Della squadra: SALENTO Istituto: IIS F. BOTTAZZI dfi CASARANO (LE) 2 IL NOSTRO ISTITUTO 3 La
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) REPORT DI DOCUMENTAZIONE Della squadra: SALENTO Istituto: IIS F. BOTTAZZI dfi CASARANO (LE) 2 IL NOSTRO ISTITUTO 3 La
FIRST LEGO LEAGUE ITALIA MILANO 6-7 marzo Squadra FLL4: LICEO ROSMINI RELAZIONE TECNICA. TITOLO DEL PROGETTO: ipec
 FIRST LEGO LEAGUE ITALIA MILANO 6-7 marzo 2015 Squadra FLL4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Using the right senses Remote Communication/
FIRST LEGO LEAGUE ITALIA MILANO 6-7 marzo 2015 Squadra FLL4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Using the right senses Remote Communication/
LABORATORI DI CULTURA DIGITALE: INFORMATICA, INTERNET E ROBOTICA
 Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
ROBOCUP JR ITALIA 2012 Riva del Garda aprile
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Della squadra REAL MARCONI Istituto IIS MARCONI GALLETTI ROBOCUP JR ITALIA 2012 Riva del Garda 18-21 aprile La
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Della squadra REAL MARCONI Istituto IIS MARCONI GALLETTI ROBOCUP JR ITALIA 2012 Riva del Garda 18-21 aprile La
Macchinina evita ostacoli Arduino
 Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Grande festa della robotica all'iti "Monaco" di Cosenza!
 Grande festa della robotica all'iti "Monaco" di Cosenza! Il 1 Aprile scorso si sono svolte nel nostro Istituto le selezioni territoriali, per il Sud Italia, della rete di robotica 'Robocup Junior', relativamente
Grande festa della robotica all'iti "Monaco" di Cosenza! Il 1 Aprile scorso si sono svolte nel nostro Istituto le selezioni territoriali, per il Sud Italia, della rete di robotica 'Robocup Junior', relativamente
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra Elettroni Rampatini Istituto P.Scalcerle ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra Elettroni Rampatini Istituto P.Scalcerle ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21
LA TECNOLOGIA. LME NXT è un sistema di sviluppo robotico.
 LA TECNOLOGIA LME NXT è un sistema di sviluppo robotico. E composto da : 1 Mattoncino Programmabile (BRICK NXT) 5 tipi di Sensori 3 Motori Software di programmazione (NXT-G) Pag 1 di 18 Il BRICK NXT Il
LA TECNOLOGIA LME NXT è un sistema di sviluppo robotico. E composto da : 1 Mattoncino Programmabile (BRICK NXT) 5 tipi di Sensori 3 Motori Software di programmazione (NXT-G) Pag 1 di 18 Il BRICK NXT Il
L Automatic Control Telelab
 Università di Siena L Marco Casini Dipartimento di Ingegneria dell Informazione Università di Siena, Italy Email: casini@ing.unisi.it UNIVERSITA DI SIENA 1 Sommario Introduzione all (ACT) Descrizione di
Università di Siena L Marco Casini Dipartimento di Ingegneria dell Informazione Università di Siena, Italy Email: casini@ing.unisi.it UNIVERSITA DI SIENA 1 Sommario Introduzione all (ACT) Descrizione di
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Rete di scuole per la
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Tecnologie per la mente. Laboratorio di Psicologia e Scienze Cognitive
 Tecnologie per la mente Laboratorio di Psicologia e Scienze Cognitive Il Laboratorio afferisce al Dipartimento di Linguistica dell Università della Calabria, diretto dalla Prof.ssa Eleonora Bilotta, è
Tecnologie per la mente Laboratorio di Psicologia e Scienze Cognitive Il Laboratorio afferisce al Dipartimento di Linguistica dell Università della Calabria, diretto dalla Prof.ssa Eleonora Bilotta, è
Metropolitana di Genova Porte di salita passeggeri
 FOR ALL THE TRAIN IN THE WORLD Metropolitana di Genova Porte di salita passeggeri Sostituzione porte dei veicoli di 1 generazione Oggetto dell intervento L intervento consiste nella: fornitura con posa
FOR ALL THE TRAIN IN THE WORLD Metropolitana di Genova Porte di salita passeggeri Sostituzione porte dei veicoli di 1 generazione Oggetto dell intervento L intervento consiste nella: fornitura con posa
Algoritmi e soluzione di problemi
 Algoritmi e soluzione di problemi Dato un problema devo trovare una soluzione. Esempi: effettuare una telefonata calcolare l area di un trapezio L algoritmo è la sequenza di operazioni (istruzioni, azioni)
Algoritmi e soluzione di problemi Dato un problema devo trovare una soluzione. Esempi: effettuare una telefonata calcolare l area di un trapezio L algoritmo è la sequenza di operazioni (istruzioni, azioni)
LE ALTRE BOARD ARDUINO
 LE ALTRE BOARD ARDUINO Nel corso degli anni la scheda Arduino si è evoluta. Dalla versione Diecimila alla versione Uno sono state apportate diverse migliorie. L ultima release della Board Uno, la REV3,
LE ALTRE BOARD ARDUINO Nel corso degli anni la scheda Arduino si è evoluta. Dalla versione Diecimila alla versione Uno sono state apportate diverse migliorie. L ultima release della Board Uno, la REV3,
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms
 Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
CMM-3D BANCO PER IL CONTROLLO DIMENSIONALE
 Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007
 SAVE Veronafiere 23-25 Ottobre 2007") Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007 Argomenti trattati Cosa è un P.L.C.? Logica cablata (Relé) Logica con il P.L.C. Vantaggi
Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007 Argomenti trattati Cosa è un P.L.C.? Logica cablata (Relé) Logica con il P.L.C. Vantaggi
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche. Pietro Bonora Liceo Scientifico A.B.
 LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
ISTITUTO COMPRENSIVO DI ARENZANO
 Ministero dell Istruzione, dell Università e della Ricerca ISTITUTO COMPRENSIVO DI ARENZANO Piazza. Calcagno, 3 60 Arenzano (Ge) www.istitutocomprensivoarenzano.gov.it Tel. e fax Tel: 00 938276 Fax: 00
Ministero dell Istruzione, dell Università e della Ricerca ISTITUTO COMPRENSIVO DI ARENZANO Piazza. Calcagno, 3 60 Arenzano (Ge) www.istitutocomprensivoarenzano.gov.it Tel. e fax Tel: 00 938276 Fax: 00
"Centrale per risparmio energetico Mod. R01"
 SCHEDA TECNICA "Centrale per risparmio energetico Mod. R01" La presente relazione descrive le caratteristiche ed il funzionamento hardware e software del prototipo in oggetto, atto a limitare gli sprechi
SCHEDA TECNICA "Centrale per risparmio energetico Mod. R01" La presente relazione descrive le caratteristiche ed il funzionamento hardware e software del prototipo in oggetto, atto a limitare gli sprechi
Tutto quello che abbiamo imparato all Istituto Tecnico Maserati. Scopri tutti i dettagli
 ROBOT @mico Tutto quello che abbiamo imparato all Istituto Tecnico Maserati Scopri tutti i dettagli ROBBIE SI PRESENTA!!!!! Ciao io sono R.O.B.B.I.E. Ovvero Robot Originale, Bello, Bravo, Intelligente
ROBOT @mico Tutto quello che abbiamo imparato all Istituto Tecnico Maserati Scopri tutti i dettagli ROBBIE SI PRESENTA!!!!! Ciao io sono R.O.B.B.I.E. Ovvero Robot Originale, Bello, Bravo, Intelligente
NeoAssunti Bilancio delle competenze Indicazioni per la compilazione
 NeoAssunti 2015 Bilancio delle competenze Indicazioni per la compilazione! Perché il Bilancio delle Competenze Il Bilancio di competenze è un percorso utilizzato a livello europeo per supportare il soggetto
NeoAssunti 2015 Bilancio delle competenze Indicazioni per la compilazione! Perché il Bilancio delle Competenze Il Bilancio di competenze è un percorso utilizzato a livello europeo per supportare il soggetto
Dimensioni. Indicatori/Elementi di comando
 3. Rilevatore di loop Dimensioni Codifica d'ordine Allacciamento elettrico Rilevatore di loop V SL SL Caratteristiche Sistema sensori per il rilevamento dei veicoli Interfaccia di controllo completa per
3. Rilevatore di loop Dimensioni Codifica d'ordine Allacciamento elettrico Rilevatore di loop V SL SL Caratteristiche Sistema sensori per il rilevamento dei veicoli Interfaccia di controllo completa per
RELAZIONE. Descrizione dell apparato sperimentale, materiale utilizzato, altre caratteristiche specifiche
 RELAZIONE Titolo Esperimento ROVER SU PANDORA Introduzione e Descrizione del fenomeno illustrato Il nostro team ha progettato e costruito un rover (denominato PLUTO) che ha come obiettivo lo studio delle
RELAZIONE Titolo Esperimento ROVER SU PANDORA Introduzione e Descrizione del fenomeno illustrato Il nostro team ha progettato e costruito un rover (denominato PLUTO) che ha come obiettivo lo studio delle
Toshiba Satellite Click Mini, ultrapiccolo e leggero campione di flessibilità
 Toshiba Satellite Click Mini, ultrapiccolo e leggero campione di flessibilità Un tempo si sarebbero chiamati netbook, invece ora questa proposta Toshiba Satellite Click Mini rientra a pieno titolo nel
Toshiba Satellite Click Mini, ultrapiccolo e leggero campione di flessibilità Un tempo si sarebbero chiamati netbook, invece ora questa proposta Toshiba Satellite Click Mini rientra a pieno titolo nel
Relazione conclusiva attività connesse alle Funzioni Strumentali per INFORMATICA E COORDINAMENTO RETE RAGAZZI DEL FIUME
 Relazione conclusiva attività connesse alle Funzioni Strumentali per INFORMATICA e COORDINAMENTO RETE RAGAZZI DEL FIUME e Docente incaricata: PERTOLDI ELISABETTA Contestualmente alla mia candidatura al
Relazione conclusiva attività connesse alle Funzioni Strumentali per INFORMATICA e COORDINAMENTO RETE RAGAZZI DEL FIUME e Docente incaricata: PERTOLDI ELISABETTA Contestualmente alla mia candidatura al
Indice generale. Ringraziamenti...xi Prefazione...xiii. Componenti necessari...xvii. Iniziare a lavorare con Arduino Benvenuti in Arduino...
 Ringraziamenti...xi Prefazione...xiii A chi si rivolge questo libro... xiii Contenuti del libro...xiv Arduino Uno e la piattaforma Arduino...xv Esempi di codice e convenzioni adottate...xvi Risorse online...xvi
Ringraziamenti...xi Prefazione...xiii A chi si rivolge questo libro... xiii Contenuti del libro...xiv Arduino Uno e la piattaforma Arduino...xv Esempi di codice e convenzioni adottate...xvi Risorse online...xvi
SISTEMA PER LA MISURA DI UMIDITA DELLA POLVERE CERAMICA
 SISTEMA PER LA MISURA DI UMIDITA DELLA POLVERE CERAMICA INTRODUZIONE 1.0) LO STRUMENTO Il sistema MoisTracker 801 è un sensore risonante a microonde a cavità cilindrica, particolarmente indicato per le
SISTEMA PER LA MISURA DI UMIDITA DELLA POLVERE CERAMICA INTRODUZIONE 1.0) LO STRUMENTO Il sistema MoisTracker 801 è un sensore risonante a microonde a cavità cilindrica, particolarmente indicato per le
Il nostro programma scolastico regionale motorio e sportivo dai 6 agli 11 anni. QUINTA Classe
 da a Il nostro programma scolastico regionale motorio e sportivo dai 6 agli 11 anni QUINTA Classe U.S.R.CALABRIA - Coordinamento Educazione motoria, fisica e sportiva Settore Educazione alla Salute Il
da a Il nostro programma scolastico regionale motorio e sportivo dai 6 agli 11 anni QUINTA Classe U.S.R.CALABRIA - Coordinamento Educazione motoria, fisica e sportiva Settore Educazione alla Salute Il
Introduzione alla programmazione
 Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
obiettivi tempi aree didattiche
 LABORATORI DI ROBOTICA EDUCATIVA Istituti di Istruzione Superiore obiettivi consolidamento del pensiero logico fondamentali della robotica learning by doing stimolo delle attitudini tecniche e creative
LABORATORI DI ROBOTICA EDUCATIVA Istituti di Istruzione Superiore obiettivi consolidamento del pensiero logico fondamentali della robotica learning by doing stimolo delle attitudini tecniche e creative
Progetto sito web Gigli Elisa
 Progetto sito web Gigli Elisa 1 Progetto sito web Indice Introduzione Progetto e Project Management PMBOK o PROJECT CHARTER WBS o o PDM Lista delle attività Matrice delle responsabilità Diagramma di Gantt
Progetto sito web Gigli Elisa 1 Progetto sito web Indice Introduzione Progetto e Project Management PMBOK o PROJECT CHARTER WBS o o PDM Lista delle attività Matrice delle responsabilità Diagramma di Gantt
Camar Elettronica s.r.l. Via Mulini Esterna n CARPI (Modena) ITALY. 2 Temperature Pt100 - Collegamento 3 fili
 ITALY. 2 Temperature Pt100 - Collegamento 3 fili") CM88-2R Microprocessore con 2 ingressi a Pt100 Il CM88-2R è uno strumento a microprocessore multicanale che accetta al suo ingresso 2 sonde a Pt100. La logica di funzionamento dello strumento è personalizzabile
CM88-2R Microprocessore con 2 ingressi a Pt100 Il CM88-2R è uno strumento a microprocessore multicanale che accetta al suo ingresso 2 sonde a Pt100. La logica di funzionamento dello strumento è personalizzabile
Robolaboratorio. Laboratorio Di Robotica: Proposta Per Alcune Attività Didattiche. Cristiana Bianchi
 Robolaboratorio Laboratorio Di Robotica: Proposta Per Alcune Attività Didattiche Cristiana Bianchi Descrizione dell unità di lavoro e apprendimento L unità di lavoro viene programmata e realizzata con
Robolaboratorio Laboratorio Di Robotica: Proposta Per Alcune Attività Didattiche Cristiana Bianchi Descrizione dell unità di lavoro e apprendimento L unità di lavoro viene programmata e realizzata con
Lettore audio Philips GoGear IT SA1MXX02B SA1MXX02K SA1MXX02KN SA1MXX02W SA1MXX04W SA1MXX04WS SA1MXX04KN SA1MXX04P SA1MXX08K.
 Lettore audio Philips GoGear IT SA1MXX02B SA1MXX02K SA1MXX02KN SA1MXX02W SA1MXX04B SA1MXX04K SA1MXX04KN SA1MXX04P SA1MXX04W SA1MXX04WS SA1MXX08K Guida rapida Guida introduttiva Panoramica sul menu principale
Lettore audio Philips GoGear IT SA1MXX02B SA1MXX02K SA1MXX02KN SA1MXX02W SA1MXX04B SA1MXX04K SA1MXX04KN SA1MXX04P SA1MXX04W SA1MXX04WS SA1MXX08K Guida rapida Guida introduttiva Panoramica sul menu principale
(c) Copyright Alcedo Italia Tutti i diritti riservati
 Copyright Alcedo Italia Tutti i diritti riservati") PDFaid.Com #1 Pdf Solutions Guida Rapida Display SW LCD in ITALIANO A Informazioni contenute nel Display LCD B Pulsantiera comandi LCD Il display viene fornito con una speciale pulsantiera (3 tasti) dedicata.
PDFaid.Com #1 Pdf Solutions Guida Rapida Display SW LCD in ITALIANO A Informazioni contenute nel Display LCD B Pulsantiera comandi LCD Il display viene fornito con una speciale pulsantiera (3 tasti) dedicata.
A7 TIG Orbital System 300
 A7 TIG Orbital System 300 SALDATURA MULTIPASS RESA AGEVOLE Kemppi K7 Attrezzature di saldatura 1(6) SISTEMA PROFESSIONALE DI SALDATURA ORBITALE TIG AUTOMATIZZATA PER SALDATURA MULTIPASS DI TUBAZIONI IN
A7 TIG Orbital System 300 SALDATURA MULTIPASS RESA AGEVOLE Kemppi K7 Attrezzature di saldatura 1(6) SISTEMA PROFESSIONALE DI SALDATURA ORBITALE TIG AUTOMATIZZATA PER SALDATURA MULTIPASS DI TUBAZIONI IN
Progetto Rainerum First LEGO League
 Progetto Rainerum First LEGO League Abstract Per la prima volta due squadre italiane partecipano alla First LEGO League, competizione di Robotica e Scienza a livello mondiale per ragazzi dai 10 ai 16 anni
Progetto Rainerum First LEGO League Abstract Per la prima volta due squadre italiane partecipano alla First LEGO League, competizione di Robotica e Scienza a livello mondiale per ragazzi dai 10 ai 16 anni
PAT/RFS116-21/02/ Allegato Utente 2 (A02)
") PAT/RFS116-21/02/2017-0099415 - Allegato Utente 2 (A02) Piano Trentino Trilingue 2017 Guida all utilizzo della Piattaforma FaD Introduzione La piattaforma utilizzata per le attività di verifica delle competenze
PAT/RFS116-21/02/2017-0099415 - Allegato Utente 2 (A02) Piano Trentino Trilingue 2017 Guida all utilizzo della Piattaforma FaD Introduzione La piattaforma utilizzata per le attività di verifica delle competenze
Regolatore di pressione elettropneumatico Connessione G ¼
 Regolatore di pressione elettropneumatico Connessione G ¼ Catalogo 8683/IT La soluzione ECONOMICA che soddisfa le esigenze del mercato Design compatto e leggero per una facile installazione e una bassa
Regolatore di pressione elettropneumatico Connessione G ¼ Catalogo 8683/IT La soluzione ECONOMICA che soddisfa le esigenze del mercato Design compatto e leggero per una facile installazione e una bassa
LINEE GUIDA e ISTRUZIONI TECNICHE
 Pag.1 di 21 Servizio attività ricreative e sportive LINEE GUIDA e ISTRUZIONI TECNICHE per la compilazione e gestione online delle domande di contributo www.fvgsport.it Pag.2 di 21 INDICE 1. Introduzione...3
Pag.1 di 21 Servizio attività ricreative e sportive LINEE GUIDA e ISTRUZIONI TECNICHE per la compilazione e gestione online delle domande di contributo www.fvgsport.it Pag.2 di 21 INDICE 1. Introduzione...3
Vibrometro Modello VB450 MANUALE D'ISTRUZIONI
 Vibrometro Modello VB450 MANUALE D'ISTRUZIONI Introduzione Congratulazioni per aver scelto il modello VB450 di Extech Instruments. Il VB450 è un vibrometro portatile costituito da un sensore di accelerazione
Vibrometro Modello VB450 MANUALE D'ISTRUZIONI Introduzione Congratulazioni per aver scelto il modello VB450 di Extech Instruments. Il VB450 è un vibrometro portatile costituito da un sensore di accelerazione
Robot Escape scatola di montaggio. Presentazione del produttore. Attrezzi necessari per la costruzione del robot Escape:
 105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
FREQUENZIMETRO FQ-16S3-800
 FREQUENZIMETRO FQ-16S3-800 By Tecnovolt (tecnovolt.altervista.org) MANUALE UTENTE Frequenzimetro FQ-16S3-800 - tecnovolt.altervista.org 1 INDICE 1 - Introduzione pag. 3 2 - Collegamento e prima accensione
FREQUENZIMETRO FQ-16S3-800 By Tecnovolt (tecnovolt.altervista.org) MANUALE UTENTE Frequenzimetro FQ-16S3-800 - tecnovolt.altervista.org 1 INDICE 1 - Introduzione pag. 3 2 - Collegamento e prima accensione
Stampante compatta, economica ed affidabile
 Stampante compatta, economica ed affidabile Prestazioni elevate ed ingombro ridotto Aficio SP C320DN è una stampante laser silenziosa e compatta che permette di produrre in modo efficiente ed affidabile
Stampante compatta, economica ed affidabile Prestazioni elevate ed ingombro ridotto Aficio SP C320DN è una stampante laser silenziosa e compatta che permette di produrre in modo efficiente ed affidabile
Realizzazione di un robot olonomo
 UNIVERSITÀ DI BRESCIA FACOLTÀ DI INGEGNERIA Dipartimento di Ingegneria dell Informazione Laboratorio di Robotica Avanzata Advanced Robotics Laboratory Corso di Robotica (Prof. Riccardo Cassinis) Realizzazione
UNIVERSITÀ DI BRESCIA FACOLTÀ DI INGEGNERIA Dipartimento di Ingegneria dell Informazione Laboratorio di Robotica Avanzata Advanced Robotics Laboratory Corso di Robotica (Prof. Riccardo Cassinis) Realizzazione
ROBOTICA E MATEMATICA. GEOGEBRA e i ROBOT. Donatella Merlo (Scuola di Robotica) Ada Sargenti (La Casa degli Insegnanti)
 Ada Sargenti (La Casa degli Insegnanti)") ROBOTICA E MATEMATICA GEOGEBRA e i ROBOT Donatella Merlo (Scuola di Robotica) Ada Sargenti (La Casa degli Insegnanti) Riva del Garda-Discovery 2012 In attesa che I robot siano interfacciabili con il software
ROBOTICA E MATEMATICA GEOGEBRA e i ROBOT Donatella Merlo (Scuola di Robotica) Ada Sargenti (La Casa degli Insegnanti) Riva del Garda-Discovery 2012 In attesa che I robot siano interfacciabili con il software
Relazione sul lavoro di Robot Design della squadra dei Miccorobokids Pistoia 1) Missioni scelte
 Missioni scelte") Relazione sul lavoro di Robot Design della squadra dei Miccorobokids Pistoia 1) Missioni scelte Inizialmente abbiamo cercato di capire come funzionavano tutte le missioni, quali punteggi assegnavano e
Relazione sul lavoro di Robot Design della squadra dei Miccorobokids Pistoia 1) Missioni scelte Inizialmente abbiamo cercato di capire come funzionavano tutte le missioni, quali punteggi assegnavano e
Quando un Punto Materiale diventa SMART
 Smartphone e tablet per l'insegnamento delle scienze 11 12 settembre 2015 Città della Scienza - Napoli Quando un Punto Materiale diventa SMART Francesco di Paola Bruno docente di Matematica e Fisica Liceo
Smartphone e tablet per l'insegnamento delle scienze 11 12 settembre 2015 Città della Scienza - Napoli Quando un Punto Materiale diventa SMART Francesco di Paola Bruno docente di Matematica e Fisica Liceo
Far lampeggiare un led o forse un semaforo?
 Far lampeggiare un led o forse un semaforo? Lezione 1 di Arduino Grazie per le slide a Giacomo Magisano, Duilio Peroni, Michele Maffucci Il circuito Un circuito è un percorso chiuso fatto da conduttore
Far lampeggiare un led o forse un semaforo? Lezione 1 di Arduino Grazie per le slide a Giacomo Magisano, Duilio Peroni, Michele Maffucci Il circuito Un circuito è un percorso chiuso fatto da conduttore
Cos è? Definizione ufficiale scritta dall inventore di Arduino, Massimo Banzi.
 Arduino Cos è? Definizione ufficiale scritta dall inventore di Arduino, Massimo Banzi. Arduino è una piattaforma open source di physical computing basata su una pemplice sheda input/output (I/O) e un ambiente
Arduino Cos è? Definizione ufficiale scritta dall inventore di Arduino, Massimo Banzi. Arduino è una piattaforma open source di physical computing basata su una pemplice sheda input/output (I/O) e un ambiente
STUDIO DEL MOTO DI UNA PALLA SU UN PIANO INCLINATO CON IL SONAR
 STUDIO DEL MOTO DI UNA PALLA SU UN PIANO INCLINATO CON IL SONAR Giovedì, ci siamo recati, accompagnati dalla professoressa di Fisica, in laboratorio per attuare degli esperimento sul moto dei corpi. L
STUDIO DEL MOTO DI UNA PALLA SU UN PIANO INCLINATO CON IL SONAR Giovedì, ci siamo recati, accompagnati dalla professoressa di Fisica, in laboratorio per attuare degli esperimento sul moto dei corpi. L
Workshop Teachers For Teachers settembre 2013
 Workshop Teachers For Teachers 23 24 settembre 2013-1 - Scratch for Arduino (S4A) - 2 - Cos'è Arduino? scheda elettronica che può essere programmata per ricevere input da diversi sensori e che può interagire
Workshop Teachers For Teachers 23 24 settembre 2013-1 - Scratch for Arduino (S4A) - 2 - Cos'è Arduino? scheda elettronica che può essere programmata per ricevere input da diversi sensori e che può interagire
Servizio Nazionale di Valutazione del Sistema Educativo di Istruzione e di Formazione anno scolastico 2004/2005
 Servizio Nazionale di Valutazione del Sistema Educativo di Istruzione e di Formazione anno scolastico 2004/2005 MANUALE DEL SITO per la compilazione degli strumenti dell Indagine Nazionale per la Valutazione
Servizio Nazionale di Valutazione del Sistema Educativo di Istruzione e di Formazione anno scolastico 2004/2005 MANUALE DEL SITO per la compilazione degli strumenti dell Indagine Nazionale per la Valutazione
KS 407. Terminale operatore con PLC integrato. inferiore a 300 ma senza carichi. Memoria Programma
 KS 407 Terminale operatore con PLC integrato - LCD grafico 240x128 - Protocollo di comunicazione CAN Open Master - Programmazione a contatti tramite linguaggio ladder - Porta USB slave - Touch Screen Alimentazione
KS 407 Terminale operatore con PLC integrato - LCD grafico 240x128 - Protocollo di comunicazione CAN Open Master - Programmazione a contatti tramite linguaggio ladder - Porta USB slave - Touch Screen Alimentazione
Logitech Wireless Touch Keyboard K400
 GenerationTech Di Luigi Clemente VIA DELLE MARGHERITE, 7 San Ferdinando di Puglia (BT) P.IVA: 07371050720 Tel: 0883624266 Fax: 0883624266 Email: postmaster@generationtech.it Sito Web: www.generationtech.it
GenerationTech Di Luigi Clemente VIA DELLE MARGHERITE, 7 San Ferdinando di Puglia (BT) P.IVA: 07371050720 Tel: 0883624266 Fax: 0883624266 Email: postmaster@generationtech.it Sito Web: www.generationtech.it
ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile
 aprile") Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile della squadra Pinin Dance Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) IL NOSTRO ISTITUTO ROBOCUP
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile della squadra Pinin Dance Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) IL NOSTRO ISTITUTO ROBOCUP
Musica a scuola. Repository multimediale di buone pratiche nella didattica della musica nel primo e nel secondo ciclo di istruzione INTRODUZIONE
 ! Musica a scuola Repository multimediale di buone pratiche nella didattica della musica nel primo e nel secondo ciclo di istruzione INTRODUZIONE La Legge 107/15 affida alla musica un ruolo di primaria
! Musica a scuola Repository multimediale di buone pratiche nella didattica della musica nel primo e nel secondo ciclo di istruzione INTRODUZIONE La Legge 107/15 affida alla musica un ruolo di primaria
La Robotica al Galilei
 La Robotica al Galilei Anche quest anno il Galilei ha ripreso il suo impegno nella Robocup Junior 2014, categoria soccer Light Weight, cioe robot calciatori con peso inferiore a 1.1 Kg, costruiti da ragazzi
La Robotica al Galilei Anche quest anno il Galilei ha ripreso il suo impegno nella Robocup Junior 2014, categoria soccer Light Weight, cioe robot calciatori con peso inferiore a 1.1 Kg, costruiti da ragazzi
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA
 PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA") PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
ACCORDO DI RETE SCUOLE CALABRESI ASSOCIATE IN RETE PER LA ROBOTICA. I Dirigenti Scolastici (o delegati)
") ACCORDO DI RETE SCUOLE CALABRESI ASSOCIATE IN RETE PER LA ROBOTICA I Dirigenti Scolastici (o delegati) ISTITUZIONI SCOLASTICHE DIRIGENTI o Delegati premesso che: - l'art. 21 della Legge n.59/1997 relativo
ACCORDO DI RETE SCUOLE CALABRESI ASSOCIATE IN RETE PER LA ROBOTICA I Dirigenti Scolastici (o delegati) ISTITUZIONI SCOLASTICHE DIRIGENTI o Delegati premesso che: - l'art. 21 della Legge n.59/1997 relativo
Manuale registro elettronico per docenti
 Manuale registro elettronico per docenti INDICE 1. EFFETTUARE L ACCESSO 2. GESTIONE REGISTRI 3. LAVORARE SUI REGISTRI 4. LAVORARE SUGLI SCRUTINI 5. CAMBIARE PASSWORD 6. PROGRAMMAZIONE 7. USCITA 1. Effettuare
Manuale registro elettronico per docenti INDICE 1. EFFETTUARE L ACCESSO 2. GESTIONE REGISTRI 3. LAVORARE SUI REGISTRI 4. LAVORARE SUGLI SCRUTINI 5. CAMBIARE PASSWORD 6. PROGRAMMAZIONE 7. USCITA 1. Effettuare
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-1 aprile REPORT DI DOCUMENTAZIONE Della squadra LaneRossi Istituto A. Rossi La Rete di scuole per la Robocup Jr ITALIA è espressione
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-1 aprile REPORT DI DOCUMENTAZIONE Della squadra LaneRossi Istituto A. Rossi La Rete di scuole per la Robocup Jr ITALIA è espressione
Verbale Incontro
 I.I.S. A. Badoni Verbale Incontro 24-10-2011 I.I.S. S. Ten. Vasc. A. Badoni sede di via Rivolta, 10 23900 Lecco LC Italia T: 0341 365369 Mail: lcis00900x@istruzione.it Web: www.isbadoni.it Arduino Mobile
I.I.S. A. Badoni Verbale Incontro 24-10-2011 I.I.S. S. Ten. Vasc. A. Badoni sede di via Rivolta, 10 23900 Lecco LC Italia T: 0341 365369 Mail: lcis00900x@istruzione.it Web: www.isbadoni.it Arduino Mobile
Si accede alla piattaforma digitando nel browser l indirizzo: dopo di chè si apre la seguente pagina,
 Padlet è una piattaforma web gratuita che permette di creare e condividere bacheche virtuali. E uno strumento multi device per cui può essere utilizzato con i vari sistemi operativi e nei dispositivi mobili
Padlet è una piattaforma web gratuita che permette di creare e condividere bacheche virtuali. E uno strumento multi device per cui può essere utilizzato con i vari sistemi operativi e nei dispositivi mobili
10 STRUTTURE DI CONTROLLO REPEAT E WHILE. Strutture di controllo e variabili strutturate
 LABORATORIO DI PROGRAMMAZIONE Corso di laurea in matematica 10 STRUTTURE DI CONTROLLO REPEAT E WHILE Marco Lapegna Dipartimento di Matematica e Applicazioni Universita degli Studi di Napoli Federico II
LABORATORIO DI PROGRAMMAZIONE Corso di laurea in matematica 10 STRUTTURE DI CONTROLLO REPEAT E WHILE Marco Lapegna Dipartimento di Matematica e Applicazioni Universita degli Studi di Napoli Federico II
Yamaha R6. Lista delle Parti
 Lista delle Parti Yamaha R6 Istruzioni di Installazione 1 Power Commander 1 Cavo USB 1 CD-ROM 1 Guida Installazione 2 Adesivi Power Commander 2 Adesivi Dynojet 1 Striscia di Velcro 1 Salvietta con Alcool
Lista delle Parti Yamaha R6 Istruzioni di Installazione 1 Power Commander 1 Cavo USB 1 CD-ROM 1 Guida Installazione 2 Adesivi Power Commander 2 Adesivi Dynojet 1 Striscia di Velcro 1 Salvietta con Alcool
Esercizi svolti e da svolgere sugli argomenti trattati nella lezione 25
 Esercizi svolti e da svolgere sugli argomenti trattati nella lezione 25 Esercizi svolti Es.. Si progetti in dettaglio il circuito che, dati quattro registri sorgente Si e quattro registri destinazione
Esercizi svolti e da svolgere sugli argomenti trattati nella lezione 25 Esercizi svolti Es.. Si progetti in dettaglio il circuito che, dati quattro registri sorgente Si e quattro registri destinazione
Sensori di Prossimità Guida Utente
 Sensori di Prossimità Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 NORME DI INSTALLAZIONE... 2 2.1 Precauzioni... 2 2.2 Connessione elettrica... 3 3 SETTAGGIO DEI CANALI CON ACQUISITORI GET... 3 4 CARATTERISTICHE
Sensori di Prossimità Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 NORME DI INSTALLAZIONE... 2 2.1 Precauzioni... 2 2.2 Connessione elettrica... 3 3 SETTAGGIO DEI CANALI CON ACQUISITORI GET... 3 4 CARATTERISTICHE
Videocitofonia 2 FILI
 Interfaccia FILI / IP Videocitofonia FILI Descrizione Interfaccia FILI/IP in custodia modulare 0 DIN. onsente la realizzazione di impianti misti FILI /IP molto estesi e con un elevato numero di dispositivi
Interfaccia FILI / IP Videocitofonia FILI Descrizione Interfaccia FILI/IP in custodia modulare 0 DIN. onsente la realizzazione di impianti misti FILI /IP molto estesi e con un elevato numero di dispositivi