XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura
|
|
|
- Giuseppina Di Lorenzo
- 8 anni fa
- Visualizzazioni
Transcript
1 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione II anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo Vertuan Tutor: prof. Giovanni Legnani Università degli Studi di Brescia, Italia

2 Sommario Introduzione Descrizione sistema Applicazioni sviluppate Conclusioni


3 Il Punto di partenza
4 Nuovi obiettivi Necessaria approfondita fase di test del software di controllo per la verifica della stabilità e affidabilità. Messa a punto del robot a cinematica parallela Cheope per poterlo utilizzare col nuovo controllore (cablaggi e installazione sensore di forza) Sviluppo di algoritmi avanzati in interazione con l ambiente quali Guidance e Contour traking.
 Sviluppo di algoritmi avanzati in")
5 Obiettivi L hardware di quest anno CNI new PC-Based QNX SW di controllo modulare Scheda controllo assi Sistema condizionamento dei segnali Cheope Cinematica parallela riconfigurabile Motori: 4 slitte lineari a 90 Piattaforma mobile Configurazione a 3 motori (3 gdl di traslazione) Sensore di forza new
 Sensore")
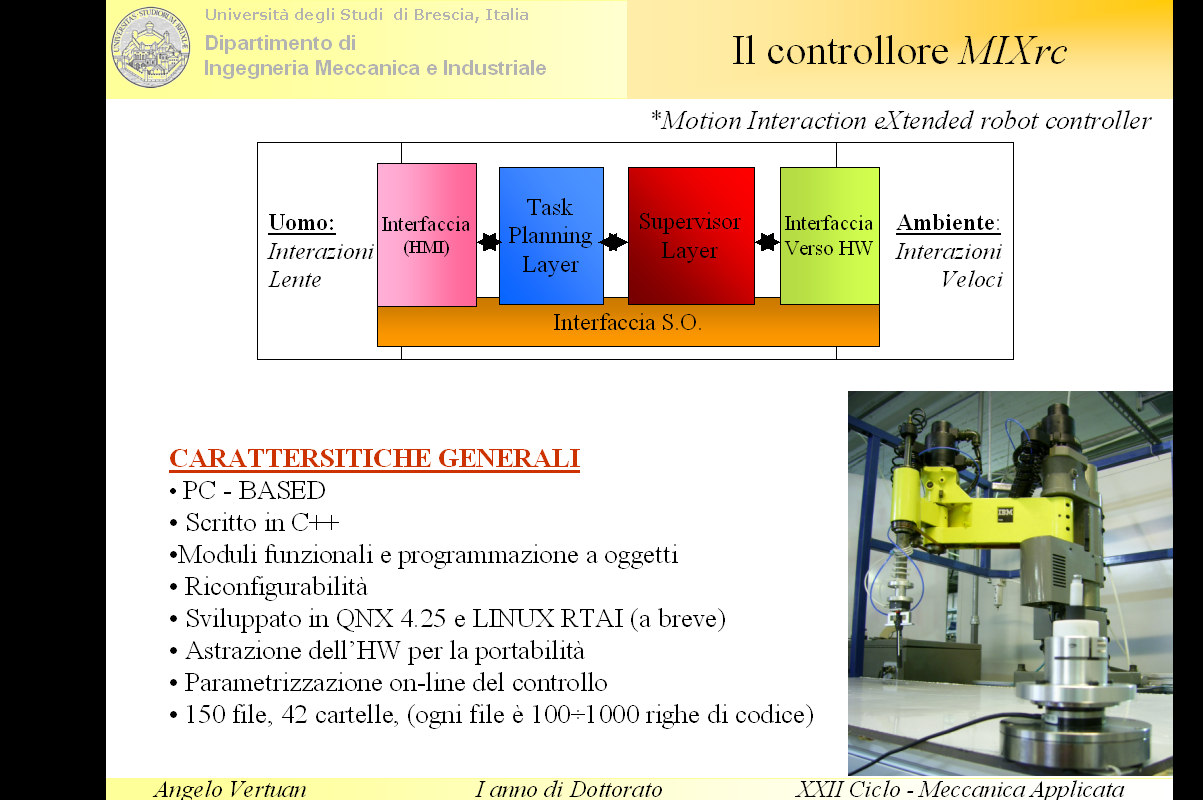
6 Il software di Controllo Interfaccia (HMI) Logica di Gestione Algoritmi di Controllo Interfaccia (Verso HW) Supervisore Processo di Controllo Generatore di Traiettorie Server I/O Board Moduli coinvolti Robot PLC ControlAlgorithms Stato iniziale SCARA (cinematica dinamica, I/O) SCARA Moto in traiettoria Nuova implementazione CHEOPE (cinematica, dinamica, I/O) CHEOPE (Azzeramento, abilitazioni, emergenze) Manual Guidance, Contour Traking
 CHEOPE (Azzeramento, abilitazioni, emergenze) Manual")
7 Spostamento legato alla forza misurata dal sensore posto sull end-effector v α F Direzione v // dir. F v e F equiversi Manual Guidance Riferimento di velocità nello spazio di lavoro Misura di forza.. Q = JS = J(kF) Riferimento di velocità ai giunti

8 UniBS Implicito Anelli Forza-velocità PC P F v Controlli complessi in interazione Anello Posizione v P Convertitori Velocità Esplicito PC Anelli Forza-velocità F Convertitori Forza Esplicito Implicito Coppia Posizione



9 Contour Tracking CONTROLLO IBRIDO FORZA/VELOCITA Craig (1981) Sensore di forza Possibili impieghi: lavorazioni superficiali (molatura, sbavatura, saldatura), rilevazione di forme, programmazione per apprendimento. DIREZIONE di CONTROLLO IN FORZA DIREZIONE di CONTROLLO in VELOCITA t n

10 Contour Tracking Riferimento forza (T) Riferimento velocità (O) (T) Terna mobile (Task Frame) con asse sempre normale e tengenziale alla superficie (O) Terna di rifermento fissa nello spazio di lavoro Uso del formalismo del Task Frame (De Schutter-Mason)

11 Compensazione angolo τ = 2ς ω n Ritardo generato dal filtro t0 t1 Direzioni reali Direzioni con ritardo angolo ϑ = & ϑτ Compensazione del ritardo.

12 Risultati

13 Conclusioni e prospettive RISULTATI OTTENUTI Verificate le funzionalità del SW di controllo applicato al robot Cheope Implementati algoritmi di controllo in interazione impliciti basati sulla misura della forza esercitata tra robot e ambiente. PROSPETTIVE Ottimizzazione dei parametri degli algoritmi fin qui implementati Determinazione dei parametri del modello dinamico del Cheope Sviluppo di algoritmi di controllo di tipo esplicito e confronto dei risultati ottenuti con gli storici ottenuti negli anni presso il nostro laboratorio con l uso di un robot SCARA

14 Grazie Grazie per l attenzione Università degli Studi di Brescia Per ulteriori informazioni: angelo.vertuan@ing.unibs.it

15 Riabilitazione e cooperazione uomo macchina Tracker Sensors Applicazioni di controllo complesse Visione Robot Cooperanti Telecamere Elettrodi EMG Lavorazioni superficiali Sensori di forza Nuove tipologie di sensori Chirurgia Strumentazione clinica Laser Interfacce aptiche Nuove frontiere

XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura
 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi avanzati di manifattura Relazione I anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente
 XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi Avanzati di Manifattura Relazione III anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
XXII CICLO DI DOTTORATO in Meccanica Applicata Curriculum in Sistemi Avanzati di Manifattura Relazione III anno: Sviluppo di controlli avanzati per manipolatori interagenti con l ambiente Dottorando: Angelo
Comportamento dinamico di manipolatori interagenti con l'ambiente
 Dottorato in Meccanica Applicata XX Ciclo II anno di corso Comportamento dinamico di manipolatori interagenti con l'ambiente Dottorando: Nicola Pedrocchi Tutor: prof. Giovanni Legnani Progetto svolto in
Dottorato in Meccanica Applicata XX Ciclo II anno di corso Comportamento dinamico di manipolatori interagenti con l'ambiente Dottorando: Nicola Pedrocchi Tutor: prof. Giovanni Legnani Progetto svolto in
Simulazione di macchina: analisi virtuale del comportamento cinematico. Elio Bergamaschi
 Simulazione di macchina: analisi virtuale del comportamento cinematico Elio Bergamaschi - Simulazione: Progettazione, Costruzione & Test Virtuali Progettista meccanico Disegno Produzione Assemblaggio Messa
Simulazione di macchina: analisi virtuale del comportamento cinematico Elio Bergamaschi - Simulazione: Progettazione, Costruzione & Test Virtuali Progettista meccanico Disegno Produzione Assemblaggio Messa
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Comportamento Dinamico di Manipolatori Interagenti con l Ambiente
 Comportamento Dinamico di Manipolatori Interagenti con l Ambiente Dottorando: Nicola Pedrocchi Tutor: Prof. Giovanni Legnani Progetto svolto in collaborazione con ITIA-CNR (sede di Milano) ROBOT & INTERAZIONE
Comportamento Dinamico di Manipolatori Interagenti con l Ambiente Dottorando: Nicola Pedrocchi Tutor: Prof. Giovanni Legnani Progetto svolto in collaborazione con ITIA-CNR (sede di Milano) ROBOT & INTERAZIONE
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
Comportamento dinamico di manipolatori interagenti con l'ambiente
 Dottorato in Meccanica Applicata XX Ciclo I anno di corso Comportamento dinamico di manipolatori interagenti con l'ambiente Dottorando: Nicola Pedrocchi Tutor: prof. Giovanni Legnani Progetto svolto in
Dottorato in Meccanica Applicata XX Ciclo I anno di corso Comportamento dinamico di manipolatori interagenti con l'ambiente Dottorando: Nicola Pedrocchi Tutor: prof. Giovanni Legnani Progetto svolto in
Automazione e controllo
 Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
Programmazione Fondi Strutturali 2007/2013 P.O.N. FSE A.S. 2013/2014 SCHEDA PROGETTUALE MODULO MECCANICA, MECCATRONICA, ENERGIA
 ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
Progettazione e realizzazione di un manipolatore elettromeccanico
 Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
: I sensori di visione - Introduzione e applicazioni Ing. Marco Catizone SICK Spa. SAVE Expo - 12 Ottobre 2010
 Ing. Marco Catizone SICK Spa SAVE Expo - 12 Ottobre 2010 Presentazione Marco Catizone Product Manager Sistemi di visione - Sick Spa :Sensori per automazione industriale :Sistemi di sicurezza :Strumentazione
Ing. Marco Catizone SICK Spa SAVE Expo - 12 Ottobre 2010 Presentazione Marco Catizone Product Manager Sistemi di visione - Sick Spa :Sensori per automazione industriale :Sistemi di sicurezza :Strumentazione
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
MECCANICA DELLE MACCHINE
 UNIVERSITA POLITECNICA DELLE MARCHE Incontro U to A 4 Marzo 2011 MDM GRUPPO DI MECCANICA DELLE MACCHINE www.dipmec.univpm.it/meccanica MECCANICA APPLICATA ALLE MACCHINE PROGETTAZIONE MECCANICA FUNZIONALE
UNIVERSITA POLITECNICA DELLE MARCHE Incontro U to A 4 Marzo 2011 MDM GRUPPO DI MECCANICA DELLE MACCHINE www.dipmec.univpm.it/meccanica MECCANICA APPLICATA ALLE MACCHINE PROGETTAZIONE MECCANICA FUNZIONALE
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
ORIENTAMENTO ELETTRONICA. Progettazione di Sistemi Elettronici Elettronica per la Robotica Elettronica per l automazione industriale
 ORIENTAMENTO ELETTRONICA Progettazione di Sistemi Elettronici Elettronica per la Robotica Elettronica per l automazione industriale Progettazione di Sistemi Elettronici a.a. 20011-2012 Michele Corrà michele.corra@3tec.it
ORIENTAMENTO ELETTRONICA Progettazione di Sistemi Elettronici Elettronica per la Robotica Elettronica per l automazione industriale Progettazione di Sistemi Elettronici a.a. 20011-2012 Michele Corrà michele.corra@3tec.it
Tecniche per l analisi della postura e del movimento
 Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Tecniche per l analisi della postura e del movimento 1/14 Tecniche di analisi La rilevazione, attraverso l utilizzo di sistemi automatici basati su tecnologie avanzate di grandezze cinematiche e dinamiche
Catalogo Corsi di Formazione
 Catalogo Corsi di Formazione 2010 Linea di Corsi di formazione sulle tecniche di programmazione e manutenzione. I corsi di formazione sono strutturati in modo da fornire, in funzione del grado di preparazione
Catalogo Corsi di Formazione 2010 Linea di Corsi di formazione sulle tecniche di programmazione e manutenzione. I corsi di formazione sono strutturati in modo da fornire, in funzione del grado di preparazione
@TRACTOR: il trattore digitale. risultati del progetto di ricerca Isotractor
 @TRACTOR: il trattore digitale risultati del progetto di ricerca Isotractor Sommario Il progetto ISOBUS Obiettivi Partner Risultati: @tractor, il trattore digitale Architettura del sistema Sensori wireless
@TRACTOR: il trattore digitale risultati del progetto di ricerca Isotractor Sommario Il progetto ISOBUS Obiettivi Partner Risultati: @tractor, il trattore digitale Architettura del sistema Sensori wireless
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Festo Mobile Electric Automation
 Festo Mobile Electric Automation 2 Electric Automation Panoramica Optimised Motion Series Schermo Controllo semplice di curve complesse Software Orientamento libero e flessibile Soluzioni di sicurezza
Festo Mobile Electric Automation 2 Electric Automation Panoramica Optimised Motion Series Schermo Controllo semplice di curve complesse Software Orientamento libero e flessibile Soluzioni di sicurezza
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale (Prof. Rocco) Appello del 27 Febbraio 2008 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa la copertina).
Controllo del moto e robotica industriale (Prof. Rocco) Appello del 27 Febbraio 2008 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa la copertina).
Motori Lineari Industriali
 Motori Lineari Industriali Sistema puramente elettrico Liberamente posizionabili lungo l intera corsa Per posizionamenti precisi e rapidi Motori lineari tecnologicamente ad alta durata Classe di protezione
Motori Lineari Industriali Sistema puramente elettrico Liberamente posizionabili lungo l intera corsa Per posizionamenti precisi e rapidi Motori lineari tecnologicamente ad alta durata Classe di protezione
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
La piattaforma di lettura targhe intelligente ed innovativa in grado di offrire servizi completi e personalizzati
 La piattaforma di lettura targhe intelligente ed innovativa in grado di offrire servizi completi e personalizzati Affidabilità nel servizio precisione negli strumenti Chanda LPR Chanda LPR è una piattaforma
La piattaforma di lettura targhe intelligente ed innovativa in grado di offrire servizi completi e personalizzati Affidabilità nel servizio precisione negli strumenti Chanda LPR Chanda LPR è una piattaforma
UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA. Corso di AUTOMAZIONE INDUSTRIALE
 UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA Corso di AUTOMAZIONE INDUSTRIALE Prof. Andrea Cataldo andrea.cataldo@itia.cnr.it ARGOMENTI delle ESERCITAZIONI CONTROLLO NUMERICO in AULA CONTROLLO
UNIVERSITA degli STUDI di BERGAMO FACOLTA di INGEGNERIA Corso di AUTOMAZIONE INDUSTRIALE Prof. Andrea Cataldo andrea.cataldo@itia.cnr.it ARGOMENTI delle ESERCITAZIONI CONTROLLO NUMERICO in AULA CONTROLLO
Catalogo Corsi di Formazione 2008
 Catalogo Corsi di Formazione 2008 Linea di offerta Corsi di formazione sulle tecniche di programmazione e manutenzione. I corsi di formazione sono strutturati in modo da fornire, in funzione del grado
Catalogo Corsi di Formazione 2008 Linea di offerta Corsi di formazione sulle tecniche di programmazione e manutenzione. I corsi di formazione sono strutturati in modo da fornire, in funzione del grado
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
 Nuove tecnologie e autismo: il progetto MICHELANGELO Filippo Muratori IRCCS Stella Maris, Pisa Silvio Bonfiglio FIMI Barco, Saronno Gli obiettivi clinici del progetto Utilizzare le Tecnologie dell Informazione
Nuove tecnologie e autismo: il progetto MICHELANGELO Filippo Muratori IRCCS Stella Maris, Pisa Silvio Bonfiglio FIMI Barco, Saronno Gli obiettivi clinici del progetto Utilizzare le Tecnologie dell Informazione
Nomenclatura delle Unità Professionali (NUP/ISTAT):
:") Denominazione della FIGURA TECNICO ELETTRICO Referenziazioni della Figura Nomenclatura delle Unità Professionali (NUP/ISTAT): 6 Artigiani, operai specializzati e agricoltori. 6.1.3.7 Elettricisti nelle
Denominazione della FIGURA TECNICO ELETTRICO Referenziazioni della Figura Nomenclatura delle Unità Professionali (NUP/ISTAT): 6 Artigiani, operai specializzati e agricoltori. 6.1.3.7 Elettricisti nelle
Firenze 28.11.2013. A. Colzani - L. Rota. 01/12/2013 Servizio Acquisti
 Valutazione dei Rischi per la modifica e l installazione di un nuovo azionamento elettrico per le porte di salita in conformità alla EN 14752. Esempio di applicazione su automotrici ALN668 circolanti su
Valutazione dei Rischi per la modifica e l installazione di un nuovo azionamento elettrico per le porte di salita in conformità alla EN 14752. Esempio di applicazione su automotrici ALN668 circolanti su
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Università degli Studi di Brescia
 XXIV Ciclo di Dottorato di Ricerca in Meccanica Applicata Curriculum: Sistemi avanzati di manifattura Relazione del Primo Anno Robot interagenti con l ambiente Dottoranda: Serena Ruggeri Coordinatore e
XXIV Ciclo di Dottorato di Ricerca in Meccanica Applicata Curriculum: Sistemi avanzati di manifattura Relazione del Primo Anno Robot interagenti con l ambiente Dottoranda: Serena Ruggeri Coordinatore e
SCADA ifix SIGMA - Sistema Integrato Gestione MAsse
 SCADA ifix www.segi-italia.com SCADA ifix SIGMA ifix è un HMI/SCADA realizzato da SEGI a partire dal pacchetto ifix della GE Intelligent Platforms. GE Intelligent Platforms è un azienda leader a livello
SCADA ifix www.segi-italia.com SCADA ifix SIGMA ifix è un HMI/SCADA realizzato da SEGI a partire dal pacchetto ifix della GE Intelligent Platforms. GE Intelligent Platforms è un azienda leader a livello
Simulazioni con hardware in the loop per progettazione e test di sistemi di tracking automatico
 Simulazioni con hardware in the loop per progettazione e test di sistemi di tracking automatico Giovanni Ferrari, Michele Soleri, Davide Corsanini, Bini Riccardo (OTO Melara S.p.A.) Luigi D Amaro (B-K
Simulazioni con hardware in the loop per progettazione e test di sistemi di tracking automatico Giovanni Ferrari, Michele Soleri, Davide Corsanini, Bini Riccardo (OTO Melara S.p.A.) Luigi D Amaro (B-K
Simulazione integrata
 Simulazione integrata per logica, motion, robotica e visione artificiale Ing. Marco Spimpolo Product & Industry Marketing Manager Motion & Drives - La tirannia del Time-to-Market Tempi di prototipazione
Simulazione integrata per logica, motion, robotica e visione artificiale Ing. Marco Spimpolo Product & Industry Marketing Manager Motion & Drives - La tirannia del Time-to-Market Tempi di prototipazione
Monitoraggio Impianti Fotovoltaici
 Monitoraggio Impianti Fotovoltaici Descrizione del sistema Sistema innovativo per diagnostica e monitoraggio degli impianti fotovoltaici a livello stringa. Due o più schede di misura per stringa: una sul
Monitoraggio Impianti Fotovoltaici Descrizione del sistema Sistema innovativo per diagnostica e monitoraggio degli impianti fotovoltaici a livello stringa. Due o più schede di misura per stringa: una sul
Il robot mobile SuperMario
 Il robot mobile SuperMario i robot mobili struttura meccanica struttura H/W struttura S/W I due estremi Veicolo telecomandato Esplorazioni e piccole operazioni remote Necessità dell operatore in linea
Il robot mobile SuperMario i robot mobili struttura meccanica struttura H/W struttura S/W I due estremi Veicolo telecomandato Esplorazioni e piccole operazioni remote Necessità dell operatore in linea
1 SEGNALAZIONE EFFICIENZA (SOGLIA DI EFFICIENZA PERSONALIZZATA)
") GBox: Personalizzazione Tempi di Fermo e Soglia di Efficienza SW0003704 Creazione 09/01/2014 Revisione del 07/07/2014 Numero 1 Le implementazioni di seguito documentate riguardano, nell ambito GSMA GBox
GBox: Personalizzazione Tempi di Fermo e Soglia di Efficienza SW0003704 Creazione 09/01/2014 Revisione del 07/07/2014 Numero 1 Le implementazioni di seguito documentate riguardano, nell ambito GSMA GBox
automazione impianti produzione calcestruzzo per alimentazione vibropresse e tubiere
 Contatto: DUECI PROGETTI srl Emanuele Colombo +39 335 8339312 automazione impianti produzione calcestruzzo per alimentazione vibropresse e tubiere Realizzato con Unigest-DP PRESENTAZIONE Si tratta di un
Contatto: DUECI PROGETTI srl Emanuele Colombo +39 335 8339312 automazione impianti produzione calcestruzzo per alimentazione vibropresse e tubiere Realizzato con Unigest-DP PRESENTAZIONE Si tratta di un
SOMMARIO. 1. Corso Base - USO E PROGRAMMAZIONE C5G - Primo giorno...1.1
 SOMMARIO 1. Corso Base - USO E PROGRAMMAZIONE C5G - Primo giorno...............1.1 Presentazione dell Unità di Controllo............................................. 1.2 Prescrizioni di sicurezza per l
SOMMARIO 1. Corso Base - USO E PROGRAMMAZIONE C5G - Primo giorno...............1.1 Presentazione dell Unità di Controllo............................................. 1.2 Prescrizioni di sicurezza per l
Tecnico per l automazione industriale. Standard formativo minimo regionale
 Tecnico per l industriale Standard formativo minimo regionale Denominazione della figura TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Professioni NUP/ISTAT correlate Attività economiche
Tecnico per l industriale Standard formativo minimo regionale Denominazione della figura TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Professioni NUP/ISTAT correlate Attività economiche
Tecnico per l automazione industriale. Standard della Figura nazionale
 Tecnico per l automazione industriale Standard della Figura nazionale Denominazione della figura TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Professioni NUP/ISTAT correlate 6. Artigiani,
Tecnico per l automazione industriale Standard della Figura nazionale Denominazione della figura TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Professioni NUP/ISTAT correlate 6. Artigiani,
UNIVERSITÀ DEGLI STUDI DI SIENA
 UNIVERSITÀ DEGLI STUDI DI SIENA FACOLTÀ DI INGEGNERIA Corso di Laurea Specialistica in Ingegneria Informatica, orientamento Robotica ed Automazione Tesi di Laurea Interazione Visuo-Aptica con Oggetti Deformabili
UNIVERSITÀ DEGLI STUDI DI SIENA FACOLTÀ DI INGEGNERIA Corso di Laurea Specialistica in Ingegneria Informatica, orientamento Robotica ed Automazione Tesi di Laurea Interazione Visuo-Aptica con Oggetti Deformabili
Giroscopi, girobussole e sistemi di guida inerziale
 Giroscopi, girobussole e sistemi di guida inerziale (Ing. Stefano Di Cairano) Scopi: Giroscopi e Sistemi di Guida Inerziale 1. Fornire misurazioni di velocità e accelerazioni angolari 2. Fornire misurazioni
Giroscopi, girobussole e sistemi di guida inerziale (Ing. Stefano Di Cairano) Scopi: Giroscopi e Sistemi di Guida Inerziale 1. Fornire misurazioni di velocità e accelerazioni angolari 2. Fornire misurazioni
CURVATURA VERSO ROBOTICA/MECCATRONICA AVANZATA INDIRIZZO INFORMATICA E TELECOMUNICAZIONI
 CURVATURA VERSO ROBOTICA/MECCATRONICA AVANZATA INDIRIZZO INFORMATICA E TELECOMUNICAZIONI MACRO-COMPETENZE IN USCITA VERSO LA ROBOTICA/MECCATRONICA AVANZATA Quattro Macro-Competenze Specialistiche: 1. Saper
CURVATURA VERSO ROBOTICA/MECCATRONICA AVANZATA INDIRIZZO INFORMATICA E TELECOMUNICAZIONI MACRO-COMPETENZE IN USCITA VERSO LA ROBOTICA/MECCATRONICA AVANZATA Quattro Macro-Competenze Specialistiche: 1. Saper
Automazioni industriali e sistemi di collaudo. Riduttori e motoriduttori ASSEMBLAGGIO E COLLAUDO TST
 Automazioni industriali e sistemi di collaudo Riduttori e motoriduttori ASSEMBLAGGIO E COLLAUDO TST Sistemi integrati di produzione, collaudo e tracciabilità. Le esperienze di System Electric permettono
Automazioni industriali e sistemi di collaudo Riduttori e motoriduttori ASSEMBLAGGIO E COLLAUDO TST Sistemi integrati di produzione, collaudo e tracciabilità. Le esperienze di System Electric permettono
THEME Matrice di Competenza - Meccatronica
 AREE DI COMPETENZA FASI DELLO SVILUPPO DELLE COMPETENZE 1. Effettuare la manutenzione e garantire l'affidabilità dei sistemi. svolgere le operazioni di manutenzione programmata di base su macchine e sistemi
AREE DI COMPETENZA FASI DELLO SVILUPPO DELLE COMPETENZE 1. Effettuare la manutenzione e garantire l'affidabilità dei sistemi. svolgere le operazioni di manutenzione programmata di base su macchine e sistemi
DISCIPLINA TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI
 DISCIPLINA TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI INDIRIZZO DI INFORMATICA E TELECOMUNICAZIONI ARTICOLAZIONE TELECOMUNICAZIONI Utilizzare consapevolmente gli strumenti
DISCIPLINA TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI INDIRIZZO DI INFORMATICA E TELECOMUNICAZIONI ARTICOLAZIONE TELECOMUNICAZIONI Utilizzare consapevolmente gli strumenti
PROGRAMMA FORMAZIONE CAME 05/2015
 PROGRAMMA FORMAZIONE 05/2015 MAGGIO L M M G V S D 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 COD. CORSO PERIODO LUOGO 01TP 02TP 05TP 09TP CANCELLI A BATTENTE CANCELLI
PROGRAMMA FORMAZIONE 05/2015 MAGGIO L M M G V S D 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 COD. CORSO PERIODO LUOGO 01TP 02TP 05TP 09TP CANCELLI A BATTENTE CANCELLI
Progetto meccatronico per la sbavatura robotizzata di manufatti dalla geometria incognita
 Progetto meccatronico per la sbavatura robotizzata di manufatti dalla geometria incognita Giacomo Ziliani, Giovanni Legnani, Nicola Pedrocchi, Antonio Visioli La contornatura robotizzata basata sul controllo
Progetto meccatronico per la sbavatura robotizzata di manufatti dalla geometria incognita Giacomo Ziliani, Giovanni Legnani, Nicola Pedrocchi, Antonio Visioli La contornatura robotizzata basata sul controllo
Specifiche dello sviluppo di un progetto software e indicazioni sulla documentazione e sulle modalità di esercizio delle prestazioni
 Specifiche dello sviluppo di un progetto software e indicazioni sulla documentazione e sulle modalità di esercizio delle prestazioni Redatto dalla Commissione per l elettronica, l informatica e la telematica
Specifiche dello sviluppo di un progetto software e indicazioni sulla documentazione e sulle modalità di esercizio delle prestazioni Redatto dalla Commissione per l elettronica, l informatica e la telematica
BANCHI COLLAUDO VOLANI, INGRANAGGI E CATENE
 BANCHI COLLAUDO VOLANI, INGRANAGGI E CATENE - 2 - Titolo Banco per controllo dimensionale e corretta fasatura ingranaggi Oggetto Il principio di funzionamento viene applicato ad una serie di banchi da
BANCHI COLLAUDO VOLANI, INGRANAGGI E CATENE - 2 - Titolo Banco per controllo dimensionale e corretta fasatura ingranaggi Oggetto Il principio di funzionamento viene applicato ad una serie di banchi da
AREA PROFESSIONALE DI RIFERIMENTO 9. TECNICO PER L AUTOMAZIONE INDUSTRIALE. Nomenclatura delle Unità Professioni (NUP/ISTAT):
:") AREA PROFESSIONALE DI RIFERIMENTO Denominazione della figura 9. TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Nomenclatura delle Unità Professioni (NUP/ISTAT): 6. Artigiani, operai
AREA PROFESSIONALE DI RIFERIMENTO Denominazione della figura 9. TECNICO PER L AUTOMAZIONE INDUSTRIALE Referenziazioni della figura Nomenclatura delle Unità Professioni (NUP/ISTAT): 6. Artigiani, operai
Tel. +41 (0)58 666 65 11 Fax +41 (0)58 666 65 17 mail: tthf@supsi.ch. Tecnologie per la comunicazione e sistemi RF/ wireless. A.
58 666 65 11 Fax +41 (0)58 666 65 17 mail: tthf@supsi.ch. Tecnologie per la comunicazione e sistemi RF/ wireless. A.") 1 Introduzione Oggi la tecnologia ci permette forme sempre più avanzate di comunicazione e ci stiamo muovendo verso la realizzazione di un mondo dove sia possibile e necessario Comunicare con chiunque,
1 Introduzione Oggi la tecnologia ci permette forme sempre più avanzate di comunicazione e ci stiamo muovendo verso la realizzazione di un mondo dove sia possibile e necessario Comunicare con chiunque,
Sistema Rilevamento Temperatura Sottocassa Treno
 Sistema Rilevamento Temperatura Sottocassa Treno 2 Sistema Rilevamento Temperatura Sottocassa Treno Il Sistema Rilevamento Temperatura Sottocassa Treno costituisce un presidio di mitigazione del rischio
Sistema Rilevamento Temperatura Sottocassa Treno 2 Sistema Rilevamento Temperatura Sottocassa Treno Il Sistema Rilevamento Temperatura Sottocassa Treno costituisce un presidio di mitigazione del rischio
PRESENTAZIONE SOLUZIONE GESTIONALE WORKGEST
 PRESENTAZIONE SOLUZIONE GESTIONALE WORKGEST Cos è WORKGEST? Workgest è un software progettato per la gestione e l'automazione delle celle di lavoro in linea. Con il termine Cella di Lavoro intendiamo un
PRESENTAZIONE SOLUZIONE GESTIONALE WORKGEST Cos è WORKGEST? Workgest è un software progettato per la gestione e l'automazione delle celle di lavoro in linea. Con il termine Cella di Lavoro intendiamo un
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Speciale Nuove piattaforme di controllo per il manifatturiero
 Poste Italiane SpA Spedizione in abbonamento postale D.L. 353/2003 (Convertito in legge 27/02/2004 n.46 - art.1, Comma 1, DCB Milano) - In caso di mancato recapito inviare al CMP/CPO di Roserio- Milano
Poste Italiane SpA Spedizione in abbonamento postale D.L. 353/2003 (Convertito in legge 27/02/2004 n.46 - art.1, Comma 1, DCB Milano) - In caso di mancato recapito inviare al CMP/CPO di Roserio- Milano
DISCIPLINA: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI CLASSE DI CONCORSO: A035 - C270
 A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
C O D. CORSO PERIODO LUOGO CAME 02TTP 10TT NORMATIVE 25
 PROGRAMMA FORMAZIONE INSTALLATORI 09/2015 SETTEMBRE L M M G V S D 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 C O D. CORSO PERIODO LUOGO 02TTP CANCELLI SCORREVOLI E
PROGRAMMA FORMAZIONE INSTALLATORI 09/2015 SETTEMBRE L M M G V S D 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 C O D. CORSO PERIODO LUOGO 02TTP CANCELLI SCORREVOLI E
Sensori di Sensori di spost spos am ent ent a cont cont t at o Pot P enziom etri enziom
 Cap 8: SENSORI PER MISURE DI MOTO Per misure di moto intendiamo le misure di spostamenti, velocità ed accelerazioni di oggetti, di grandezze cinematiche sia lineari che angolari. Sensori di spostamento
Cap 8: SENSORI PER MISURE DI MOTO Per misure di moto intendiamo le misure di spostamenti, velocità ed accelerazioni di oggetti, di grandezze cinematiche sia lineari che angolari. Sensori di spostamento
Collaborazione Multidisciplinare Dal Concept al Commissioning
 Collaborazione Multidisciplinare Dal Concept al Commissioning radu.simionescu@siemens.com Contenuti PLM Product LifeCycle Management & Digital Factory Collaborazione multi-disciplinare Concept Virtual
Collaborazione Multidisciplinare Dal Concept al Commissioning radu.simionescu@siemens.com Contenuti PLM Product LifeCycle Management & Digital Factory Collaborazione multi-disciplinare Concept Virtual
MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO
 PIANO DI LAVORO CLASSE 5 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: ALGEBRA DEGLI SCHEMI A BLOCCHI
PIANO DI LAVORO CLASSE 5 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: ALGEBRA DEGLI SCHEMI A BLOCCHI
Manuale del Programma EPROM Creator V1.0
 EPROM Creator V1.0 1 Manuale del Programma EPROM Creator V1.0 By Gianluca Calicchia EPROM Creator V1.0 2 Indice Manuale del Programma EPROM Creator V1.0...1 Premessa...3 Requisiti...3 Procedura per realizzare
EPROM Creator V1.0 1 Manuale del Programma EPROM Creator V1.0 By Gianluca Calicchia EPROM Creator V1.0 2 Indice Manuale del Programma EPROM Creator V1.0...1 Premessa...3 Requisiti...3 Procedura per realizzare
Anno scolastico 2015 / 2016. Elettrotecnica ed elettronica Sistemi automatici. Docente/i
 Alessandria, 17 ottobre 2015 Anno scolastico 2015 / 201 Classe 5AE Indirizzo Materia Elettrotecnica ed elettronica Sistemi automatici Docente/i Nome e cognome Franco GABRIELE Firma Nome e cognome Antonietta
Alessandria, 17 ottobre 2015 Anno scolastico 2015 / 201 Classe 5AE Indirizzo Materia Elettrotecnica ed elettronica Sistemi automatici Docente/i Nome e cognome Franco GABRIELE Firma Nome e cognome Antonietta
SERVOAZIONAMENTI SERVOAZIONAMENTO DIGITALE SINGOLO ASSE ESTREMAMENTE COMPATTO
 SERVOAZIONAMENTI SERVOAZIONAMENTO DIGITALE SINGOLO ASSE ESTREMAMENTE COMPATTO DS2020 MAGGIORE COMPATTEZZA E FLESSIBILITÀ IN UNA VASTA GAMMA DI APPLICAZIONI INDUSTRIALI WHAT MOVES YOUR WORLD INTRODUZIONE
SERVOAZIONAMENTI SERVOAZIONAMENTO DIGITALE SINGOLO ASSE ESTREMAMENTE COMPATTO DS2020 MAGGIORE COMPATTEZZA E FLESSIBILITÀ IN UNA VASTA GAMMA DI APPLICAZIONI INDUSTRIALI WHAT MOVES YOUR WORLD INTRODUZIONE
Teseo 7 Fashion. Il verticalizzato della linea Teseo7 per le aziende del settore Moda. ZUCCHETTI CENTRO SISTEMI SPA www.centrosistemi.
 Teseo 7 Fashion Il verticalizzato della linea Teseo7 per le aziende del settore Moda. ZUCCHETTI CENTRO SISTEMI SPA www.centrosistemi.it tel. (+39) 055 91971 fax. (+39) 055 9197515 e-mail: commerciale@centrosistemi.it
Teseo 7 Fashion Il verticalizzato della linea Teseo7 per le aziende del settore Moda. ZUCCHETTI CENTRO SISTEMI SPA www.centrosistemi.it tel. (+39) 055 91971 fax. (+39) 055 9197515 e-mail: commerciale@centrosistemi.it
2.2.3 Comportamento degli organi che trasformano l energia meccanica 32 2.2.3.1 Effetti inerziali 32 2.2.3.2 Effetto della rigidezza e dello
 Indice Prefazione IX 1. Un nuovo approccio alla progettazione e costruzione di macchine 1 1.1 Sistemi tecnici nella costruzione di macchine: esempi 1 1.2 Concetti essenziali del nuovo approccio alla progettazione
Indice Prefazione IX 1. Un nuovo approccio alla progettazione e costruzione di macchine 1 1.1 Sistemi tecnici nella costruzione di macchine: esempi 1 1.2 Concetti essenziali del nuovo approccio alla progettazione
MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO
 PIANO DI LAVORO CLASSE 4 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: SISTEMI E MODELLI (30 ore)
PIANO DI LAVORO CLASSE 4 ES A.S. 2014-2015 MATERIA : SISTEMI ELETTRICI AUTOMATICI INS. TEORICO: PROF. CIVITAREALE ALBERTO INS. TECNICO-PRATICO: PROF. BARONI MAURIZIO MODULO 1: SISTEMI E MODELLI (30 ore)
Gestione in qualità degli strumenti di misura
 Gestione in qualità degli strumenti di misura Problematiche Aziendali La piattaforma e-calibratione Il servizio e-calibratione e-calibration in action Domande & Risposte Problematiche Aziendali incertezza
Gestione in qualità degli strumenti di misura Problematiche Aziendali La piattaforma e-calibratione Il servizio e-calibratione e-calibration in action Domande & Risposte Problematiche Aziendali incertezza
PROGRAMMAZIONE DI T.T.I.M. CLASSE V. Opzione Manutentore Impianti Elettrici e Automazione
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE ) CLASSE V Opzione Manutentore Impianti Elettrici e Automazione (8 ore/settimana programmate su 30 settimane/anno,
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE ) CLASSE V Opzione Manutentore Impianti Elettrici e Automazione (8 ore/settimana programmate su 30 settimane/anno,
MESA PROJECT ITIS G. Cardano Pavia New Curriculum
 MESA PROJECT ITIS G. Cardano Pavia New Curriculum L'impatto delle innovazioni educative del Progetto MESA ha portato alcuni cambiamenti significativi e miglioramenti nel curriculum dei seguenti argomenti:
MESA PROJECT ITIS G. Cardano Pavia New Curriculum L'impatto delle innovazioni educative del Progetto MESA ha portato alcuni cambiamenti significativi e miglioramenti nel curriculum dei seguenti argomenti:
MT2 e MT3: Schede e sistemi di controllo motori passo passo
 IPSES S.r.l. Scientific Electronics MT2 e MT3: Schede e sistemi di controllo motori passo passo La gamma più completa per il controllo intelligente dei motori passo passo I nostri sistemi sono la soluzione
IPSES S.r.l. Scientific Electronics MT2 e MT3: Schede e sistemi di controllo motori passo passo La gamma più completa per il controllo intelligente dei motori passo passo I nostri sistemi sono la soluzione
ISTITUTO SUPERIORE D. MILANI MONTICHIARI CORSO DI AUTOCAD 2014/15 DOCENTE :GIOACCHINO IANNELLO
 ISTITUTO SUPERIORE D. MILANI MONTICHIARI CORSO DI AUTOCAD 2014/15 DOCENTE :GIOACCHINO IANNELLO AutoCAD (prodotto dall'autodesk) è, senza dubbio, il programma più diffuso nel campo del disegno tecnico assistito
ISTITUTO SUPERIORE D. MILANI MONTICHIARI CORSO DI AUTOCAD 2014/15 DOCENTE :GIOACCHINO IANNELLO AutoCAD (prodotto dall'autodesk) è, senza dubbio, il programma più diffuso nel campo del disegno tecnico assistito
Elenco unità capitalizzabili non presenti nello standard nazionale
 Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
Elenco unità capitalizzabili non presenti nello standard nazionale TITOLO UNITÀ :Utilizzare le tecniche fondamentali della meccanica applicata alle macchine Definire le tecniche per la trasmissione del
LAVORI D UFFICIO, GRAFICA E INFORMATICA TECNICO HARDWARE
 MACROSETTORE LAVORI D UFFICIO, GRAFICA E INFORMATICA TECNICO HARDWARE 1 TECNICO HARDWARE TECNICO PROFESSIONALI prima annualità 2 UNITÀ FORMATIVA CAPITALIZZABILE 1 Assemblaggio Personal Computer Approfondimento
MACROSETTORE LAVORI D UFFICIO, GRAFICA E INFORMATICA TECNICO HARDWARE 1 TECNICO HARDWARE TECNICO PROFESSIONALI prima annualità 2 UNITÀ FORMATIVA CAPITALIZZABILE 1 Assemblaggio Personal Computer Approfondimento
Dopo il diploma in Elettrotecnica Elettronica
 !! !!!#! %&! (#%) Dopo il diploma in Elettrotecnica Elettronica Sbocchi lavorativi Progettista e installatore di impianti elettrici civili e industriali Progettista e installatore di impianti fotovoltaici
!! !!!#! %&! (#%) Dopo il diploma in Elettrotecnica Elettronica Sbocchi lavorativi Progettista e installatore di impianti elettrici civili e industriali Progettista e installatore di impianti fotovoltaici
Convertitori di frequenza PowerFlex Funzioni e applicazioni avanzate (AUD 09)
") Rev 5058-CO900E Copyright 2015 Rockwell Automation, Inc. All rights reserved. Convertitori di frequenza PowerFlex Funzioni e applicazioni avanzate (AUD 09) Automation University, Parma Marzo 2015 PUBLIC
Rev 5058-CO900E Copyright 2015 Rockwell Automation, Inc. All rights reserved. Convertitori di frequenza PowerFlex Funzioni e applicazioni avanzate (AUD 09) Automation University, Parma Marzo 2015 PUBLIC
OFFERTA FORMATIVA INDIRIZZI DI STUDIO
 ISTITUTO TECNICO E. SCALFARO Piazza Matteotti, 1- CATANZARO Tel.: 0961 745155 - Fax: 0961 744438 E-mail:cztf010008@istruzione.it Sito: www.itiscalfaro.cz.it ANNO SCOLASTICO 2011 2012 OFFERTA FORMATIVA
ISTITUTO TECNICO E. SCALFARO Piazza Matteotti, 1- CATANZARO Tel.: 0961 745155 - Fax: 0961 744438 E-mail:cztf010008@istruzione.it Sito: www.itiscalfaro.cz.it ANNO SCOLASTICO 2011 2012 OFFERTA FORMATIVA
MARKETING AUTOMATION CAMPAIGN
 MARKETING AUTOMATION CAMPAIGN PIATTAFORMA PROFESSIONALE PER IL DIRECT MARKETING Validità: Dicembre 2013 Questa pubblicazione è puramente informativa. 24 ORE SOFTWARE non offre alcuna garanzia, esplicita
MARKETING AUTOMATION CAMPAIGN PIATTAFORMA PROFESSIONALE PER IL DIRECT MARKETING Validità: Dicembre 2013 Questa pubblicazione è puramente informativa. 24 ORE SOFTWARE non offre alcuna garanzia, esplicita
Calcolo Focale. Ing. Vincenzo Falanga
 Calcolo Focale Calcolo Focale Sommario Calcolo Focale... 2 Installazione... 3 Installazione su dispositivi mobili (Tablet, smartphone, )... 3 Installazione su Pc... 3 Ottenere un codice di Attivazione...
Calcolo Focale Calcolo Focale Sommario Calcolo Focale... 2 Installazione... 3 Installazione su dispositivi mobili (Tablet, smartphone, )... 3 Installazione su Pc... 3 Ottenere un codice di Attivazione...
RAPPORTO DI FINE TIROCINIO
 RAPPORTO DI FINE TIROCINIO Università degli Studi di Roma Tre Laboratorio PRiSMA Prove e Ricerca su Strutture e Materiali Prove sperimentali su sistema di isolamento sismico specifico per interruttori
RAPPORTO DI FINE TIROCINIO Università degli Studi di Roma Tre Laboratorio PRiSMA Prove e Ricerca su Strutture e Materiali Prove sperimentali su sistema di isolamento sismico specifico per interruttori
AREA DI PROGETTO: CAMBIO DI VELOCITA' SINCRONIZZATO
 ISTITUTO DI ISTRUZIONE SUPERIORE STATALE GALILEI -SANI Latina Anno scolastico 2014-2015 AREA DI PROGETTO: CAMBIO DI VELOCITA' SINCRONIZZATO CLASSE: 5 A Meccanica INDIRIZZO: MECCANICA E MECCATRONICA COORDINATORE
ISTITUTO DI ISTRUZIONE SUPERIORE STATALE GALILEI -SANI Latina Anno scolastico 2014-2015 AREA DI PROGETTO: CAMBIO DI VELOCITA' SINCRONIZZATO CLASSE: 5 A Meccanica INDIRIZZO: MECCANICA E MECCATRONICA COORDINATORE
Cenni sulle reti e applicazioni remote ( internet, applicazioni e servizi web )
") Classe III A (Indirizzo Economico - Sociale) Fondamenti di informatica: Definizione di Informatica, dato e informazione. Cenni storici. Rappresentazione in forma binaria dei dati. Conversione da decimale
Classe III A (Indirizzo Economico - Sociale) Fondamenti di informatica: Definizione di Informatica, dato e informazione. Cenni storici. Rappresentazione in forma binaria dei dati. Conversione da decimale
Corso base fotografia digitale
 Corso base fotografia digitale Lezione numero 1: La macchina fotografica: evoluzione del congegno fotografico dal foro stenopeico alla macchina digitale. I formati delle pellicole e dei sensori: cenni
Corso base fotografia digitale Lezione numero 1: La macchina fotografica: evoluzione del congegno fotografico dal foro stenopeico alla macchina digitale. I formati delle pellicole e dei sensori: cenni
TECHNICALITY PER IL SETTORE DELL AUTOMAZIONE
 ALLEGATO/2 SYLLABUS TECHNICALITY PER IL SETTORE DELL AUTOMAZIONE Responsabile del modulo: Ing. Roberto Fattori - Festo Italia Spa Sistemi automatici Manipolazione meccatronica Sistemi di visione per l
ALLEGATO/2 SYLLABUS TECHNICALITY PER IL SETTORE DELL AUTOMAZIONE Responsabile del modulo: Ing. Roberto Fattori - Festo Italia Spa Sistemi automatici Manipolazione meccatronica Sistemi di visione per l
Sistem Elettrica Due Automazioni industriali
 Sistemi di collaudo Sistem Elettrica Due Automazioni industriali Un Gruppo che offre risposte mirate per tutti i vostri obiettivi di produzione automatizzata e di collaudo ESPERIENZA, RICERCA, INNOVAZIONE
Sistemi di collaudo Sistem Elettrica Due Automazioni industriali Un Gruppo che offre risposte mirate per tutti i vostri obiettivi di produzione automatizzata e di collaudo ESPERIENZA, RICERCA, INNOVAZIONE
OCS Open Control System
 OCS Open Control System L OCS è una applicazione software innovativa di supervisione e controllo, progettata e realizzata da Strhold S.p.A. per consentire la gestione centralizzata di sottosistemi periferici.
OCS Open Control System L OCS è una applicazione software innovativa di supervisione e controllo, progettata e realizzata da Strhold S.p.A. per consentire la gestione centralizzata di sottosistemi periferici.
Luigi Piroddi piroddi@elet.polimi.it
 Automazione industriale dispense del corso 2. Introduzione al controllo logico Luigi Piroddi piroddi@elet.polimi.it Modello CIM Un moderno sistema di produzione è conforme al modello CIM (Computer Integrated
Automazione industriale dispense del corso 2. Introduzione al controllo logico Luigi Piroddi piroddi@elet.polimi.it Modello CIM Un moderno sistema di produzione è conforme al modello CIM (Computer Integrated
MbyM Presentazione attività di sviluppo SW di Pianificazione a capacità finita Personalizzati
 MbyM Presentazione attività di sviluppo SW di Pianificazione a capacità finita Personalizzati Filippo Vasta Amministratore MbyM srl 1 Servizio Servizio MbyM dispone di una tecnologia SW che consente di
MbyM Presentazione attività di sviluppo SW di Pianificazione a capacità finita Personalizzati Filippo Vasta Amministratore MbyM srl 1 Servizio Servizio MbyM dispone di una tecnologia SW che consente di
Misure di spostamento e dimensionali
 Misure di spostamento e dimensionali Pag. 1 Figura 4.5 Effetto di carico del potenziometro Pag. 2 Figura 4.6 Costruzione di potenziometri a filamento avvolto UNIVERSITA DI FIRENZE Pag. 3 Figura 4.7 Risoluzione
Misure di spostamento e dimensionali Pag. 1 Figura 4.5 Effetto di carico del potenziometro Pag. 2 Figura 4.6 Costruzione di potenziometri a filamento avvolto UNIVERSITA DI FIRENZE Pag. 3 Figura 4.7 Risoluzione
MED - EXPRESS Bari, 23 giugno 2011 Nicola Savino, Consorzio CETMA
 Sistema di diagnostica remota per il controllo della temperatura della rotaia MED - EXPRESS Bari, 23 giugno 2011 Nicola Savino, Consorzio CETMA FERSALENTO S.r.l. L Azienda opera nel settore delle costruzioni
Sistema di diagnostica remota per il controllo della temperatura della rotaia MED - EXPRESS Bari, 23 giugno 2011 Nicola Savino, Consorzio CETMA FERSALENTO S.r.l. L Azienda opera nel settore delle costruzioni
Sistemi di prelievo oggetti alla rinfusa
 Sistemi di prelievo oggetti alla rinfusa + 1 Finalmente qualcosa di veramente nuovo. Già pronto. Abbiamo due sistemi già pronti, il sistema LV a scansione laser ed il sistema KV che sfrutta il noto proiettore
Sistemi di prelievo oggetti alla rinfusa + 1 Finalmente qualcosa di veramente nuovo. Già pronto. Abbiamo due sistemi già pronti, il sistema LV a scansione laser ed il sistema KV che sfrutta il noto proiettore
JOB DESCRIPTION. Tecnico Senior alla progettazione SW Automazione. (Unità di base con dei compiti stabiliti. Può non essere ricoperta da nessuno)
") JOB DESCRIPTION Tecnico Senior alla progettazione SW Automazione TITOLO POSIZIONE (Unità di base con dei compiti stabiliti. Può non essere ricoperta da nessuno) Addetto tecnico Senior alla progettazione
JOB DESCRIPTION Tecnico Senior alla progettazione SW Automazione TITOLO POSIZIONE (Unità di base con dei compiti stabiliti. Può non essere ricoperta da nessuno) Addetto tecnico Senior alla progettazione
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como LOGICA DI CONTROLLO
 Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
PROGRAMMAZIONE DIDATTICA ANNUALE. SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica
 ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
SISTEMI E RETI 4(2) 4(2) 4(2) caratteristiche funzionali
 4(2) 4(2) caratteristiche funzionali") CL AS SE INFORMATICA 6(3) 6(4) - 6(4) SISTEMI E RETI 4(2) 4(2) 4(2) TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI COMPETENZE 3 Essere in grado di sviluppare semplici applicazioni
CL AS SE INFORMATICA 6(3) 6(4) - 6(4) SISTEMI E RETI 4(2) 4(2) 4(2) TECNOLOGIE E PROGETTAZIONE DI SISTEMI INFORMATICI E DI TELECOMUNICAZIONI COMPETENZE 3 Essere in grado di sviluppare semplici applicazioni
Realizzare macchine sempre più ad alte performance riducendo il tempo dedicato alla progettazione.
 Realizzare macchine sempre più ad alte performance riducendo il tempo dedicato alla progettazione. Cristina Furini Product Expert Motion Control SAVE Verona 2013 Ad ogni necessità una soluzione Prima generazione
Realizzare macchine sempre più ad alte performance riducendo il tempo dedicato alla progettazione. Cristina Furini Product Expert Motion Control SAVE Verona 2013 Ad ogni necessità una soluzione Prima generazione