ROBOCUPJR 2011 Z8OBT. PARTECIPA ALLA GARA DI: rescue ISTITUTO: ITIS A. Rossi CLASSE: 5BT
|
|
|
- Amando Perini
- 8 anni fa
- Visualizzazioni
Transcript
1 ROBOCUPJR 2011 Z8OBT PARTECIPA ALLA GARA DI: rescue ISTITUTO: ITIS A. Rossi CLASSE: 5BT 1

2 CAP. 1 - DATI GENERALI Il tema Z80BT nasce dall unione di due squadre, dello stesso istituto, che parteciparono alla robocupjr Ferrari Marco e Diego Verona, provenienti dalla squadra 8080BT (qualificatasi al primo posto parimerito nell edizione 2010) e Casarin Nicola ex membro dei Magnagatti, sono oggi i tre membri del team Z80BT. Il nome, come già era stato per 8080BT, nasce dall idea di onorare un nostro ex-studente, il padre del microprocessore: Fererico Faggin. Egli frequentò l istituto A. Rossi di Vicenza e progettò l architettura del primo microcontrollore il 4004, e dei microcontrollori successivi quali per esempio l 8080 e Z80. La sigla BT invece, indica la sezione di appartenenza dei membri del team (5 BT ELETTRONICA E TELECOMUNICAZIONI ITIS ROSSI). Si vuole sottolineare che il robot è stato sviluppato interamente da noi studenti, senza asulio del corpo insegnante ed ognuno di noi collabora al progetto in tutti gli ambiti che questo comporta (software, hardware, ecc). Z80BT: Casarin Nicola Ferrari Marco Verona Diego (docente responsabile Serbo G.) 2

3 CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE La partecipazione all evento ROBOCUPJR 2010 ci venne proposta dal professore incaricato di gestire l evento, organizzatto proprio dalla nostra scuola, e non potevamo certo rifiutare l onore di rappresentare la nostra scuola. Così è nato il progetto 8080BT. Per eventuale interesse sul progetto del robot 8080BT, posizionatosi al primo posto parimerito nell edizione 2010, si rimanda al sito e Team Z80BT: Diego Verona Nicola Casarin Marco Ferrari Con non poche difficoltà e con molte ore di lavoro, per il dispiacere dei docenti incaricati di tenere il labratorio aperto per noi, finimmo il robot e ci presentammo alle gare abbastanza fiduciosi. Anche se non ci aspettavamo un simile successo, ma dopo una tale annata, non potevamo certo rifiutarci per la prossima edizione di Catania sperando solo che sia un esperiena interessante e straordinaria come è stato per l anno prima. 3

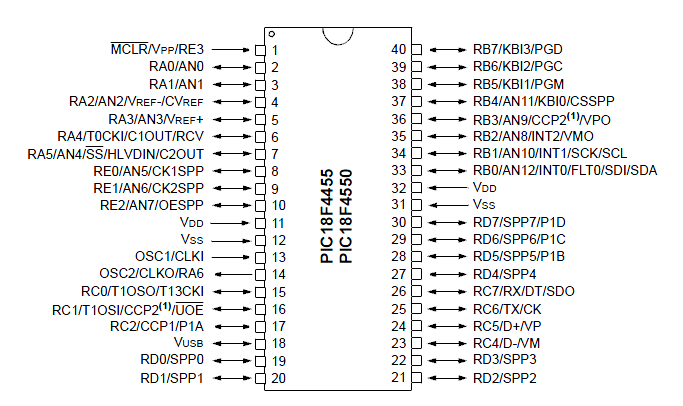
4 CAP. 3 NOME E STRUTTURA DEL ROBOT Nome robot Il nome, Z80BT, è stato dato in ricordo dell'enorme successo del microprocessore Z80 della Zilog fondata dal fisico italiano Federico Faggin, inventore del microprocessore, che ha svolto gli studi superiore nel nostro istituto. BT è la sezione della nostra classe appartenente all'indirizzo di elettronica e telecomunicazioni. (vedi cap. 1) Architettura L'architettura del robot è imperniata su due microcontrollori PIC della Microchip. I motori utilizzati per manovrare e far procedere il robot sono passo passo i quali devono essere comandati con impulsi propriamente temporizzati. Uno dei due pic è stato interamente dedicato per il pilotaggio dei motori e quindi per il seguilinea. Questo pic (PIC18F4550) da 40 pin deve gestire in contemporanea la temporizzazione dei due motori e i cinque sensori di luce per riconoscere la linea. Il pilotaggio dei motori avviene mediante un circuito di potenza standardche fa uso del driver L298. I sensori di luce sono dei fototransistor (CNY) messi uno a fianco all'altro e per aumentarne le prestazioni sono stati utilizzati dei led a infrarossi. Il secondo pic (PIC18F458) sempre da 40 pin, è invece adibito alla gestione dei sensori ultrasuoni e i servomotori per la pinza. Nella configurazione ideale vengono utilizzati cinque sensori ultrasuoni SRF05 : uno per lato più uno ulteriore in un lato. Il servomotore utilizzato per la chiusura e l'apertura della pinza (HS422) può girare solo di 180 mentre quello utilizzato per sollevare la pinza è a rotazione continua. La parte meccanica della pinza è costituita da un kit da montare. I due pic dialogano mediante una delle porte a bordo. 4

5 CNY MOTORE PASSO PASSO L298 18F4550 A/D CNY CNY MOTORE PASSO PASSO L298 CNY CNY SRF05 SRF05 SRF05 18F458 PINZA HS422 CARRUCOLA SRF05 SRF05 CNY CAP. 4 MECCANICA La struttura base del robot è un semplice rettangolo leggermente sagomato ai bordi per facilitare il passaggio per le porte dell arena. Le dimensioni, 18*13 [cm], sono limitate dalla larghezza dei corridoi che collegano le stanze del percorso. Il 5

6 materiale utilizzato è il plexigas, molto resistente e leggero, di facile lavorazione ma che non presnta una buona risposta alle vibrazioni e per tanto si utilizzeranno cuscinetti posti tra le schede circuitali e i distanziali usati per sostenere quest ultime. Sul davanti è stata aggiunta una forma che ricorda un triangolo in modo da spostare eventuali detriti lungo il bordo del robot evitando sovraccarichi eccessivi per i motori. L altezza da terra di tale struttura e di circa 6 cm, scelta condizionata dalla dimensione dei motori e da altri fattori ambinetali. La locomozione del robot è garantita da due ruote motrici anteriori che permettono i cambi di direzione e da una ruota pivottante posteriore (autocostruita) necessaria a mantenere la stabilità e l equilibrio del robot. Le ruote anteriori e la ruotina posteriori sono state posizionate a stretta vicinanza per garantire una rotazione del robot quasi circolare, in modo da garantire il minor spazio possibile necessario al robot per efettuare una curva stretta. Il baricentro del robot è posizionato tra i due motori per garantire una migliore presa delle ruote e maggiore stabilità nei movimenti. Le ruote utilizzate sono di foam, materiale con elevata aderenza e 6

7 larghezza, per garantire le migliori condizioni di guida possibili. La pinza è stata invece comprata. CAP. 5 UNITÀ DI CONTROLLO L'unità di controllo è costituita, come precedentemente esposto, da due microcontrollori PIC della Microchip: PIC18F4550 e PIC18F458. Entrambi sono alimentati con una tensione continua di 5V e il clock di sistema è ottenuto con un quarzo di 40Mhz. Il primo pic, 18F4550, è utilizzato per il pilotaggio dei motori e il rilevamento della linea; è stato scelto per il seguilinea perché implementa 13 canali per la conversione analogico digitale. Di questi ne sono stati utilizzati 5 per rilevare il valore di tensione fornito dai sensori ( pin: RA0, RA1, RA5, RE0, RE1), mentre 2 canali (pin: RA2, RA3) sono stati usati per fornire la tensione di riferimento del convertitore a bordo del pic. 5 pin invece sono stati utilizzati per indicare quando viene rilevato il nero dai sensori (pin: RE2, RC1, RC2, RC6, RC7). Tutti i pin di PORTD sono impiegati per inviare gli impulsi di 7

8 comando per i motori passo passo, in tutto 8 pin (4 pin per motore). Infine i pin di PORTB (8 pin) sono stati impiegati per la comunicazione con il secondo pic. Il secondo pic, 18F458, gestisce i sensori ultrasuoni inviando loro un segnale di trigger comune e poi calcola la distanza misurando la durata dell'impulso di risposta. Deve anche acquisire un segnale analogico proveniente da un sensore di luce CNY. Questo pic deve poi fornire due segnali PWM con frequenza 50Hz per il controllo dei servomotori. Entrambe i pic possiedono timer da 8 e 16 bit usati per i segnali temporizzati. La conversione analogico-digitale è a 10 bit. 8

9 9

10 CAP. 6 SENSORI I sensori di luce utilizzati sono dei fototransistor abbinati a led agli infrarossi. Ogni sensore incorpora un led ma si è preferito mettere dei led agli infrarossi esterni che incrementano le prestazioni dei sensori. Ogni fototransistor è collegato in serie con una resistenza ed è alimentato a 5V. Quando il fototransistor viene colpito dalla luce comincia a condurre e maggiore è l'intensità della luce e maggiore è la corrente che passa per il sensore. La corrente passando attraverso la resistenza, crea una differenza di potenziale ai capi di quest'ultima che è direttamente proporzionale alla corrente e quindi anche all'intensità della luce. I sensori ultrasuoni vengono alimentati a 5V. Necessitano di un segnale di ingresso di durata 10ms e fornisce in uscita un segnale la cui durata è proporzionale alla distanza rilevata. La distanza minima che possono rilevare è di 1cm mentre la massima è di 4m. CAP. 7 ATTUATORI I principali attuatori sono costituiti dalle due schede di potenza per i motori. In ogni scheda c'è l'integrato L298 che un ponte ad H per il pilotaggio di motori. Nella scheda sono 10

11 presenti dei diodi di protezione: sono stati scelti i BYV27 che sopportano 2 ampere e sono particolarmente adatti per i motori perché sono molto veloci. Ci sono poi condensatori per il filtraggio e 4 resistenze da 1Ohm nel caso sia necessario misurare la corrente assorbita dal motore. Ci sono poi i connattori per gli ingressi e le uscite. 11

12 CAP. 8 AMBIENTE DI SVILUPPO Per la programmazione dei pic è stato usato il programma Mplab (v.8.40) della Microchip con il compilatore HI-TECH per la programmazione in c. Questo programma è stato scelto perché è predisposto per la programmazione diretta dei pic. Il programmatore utilizzato è il Pickit2 della Microchip. 12

13 CAP. 9 IL PROGRAMMA SOFTWARE Ogni pic ha un programma a se, ed entrambi non sono divisi in sotto programmi o subrutine. Il software per la gestione dei motori e dei sensori di luce deve principalmente gestire la temporizzazione dei motori: deve fornire impulsi di frequenza variabile per ciascun motore il quale non deve essere influenzato dalla frequenza dell'altro motore. A questo scopo si è deciso di creare un delay (un periodo) base che viene poi moltiplicato per un certo valore al fine di ottenere la durata di periodo desiderata. Per fare questo il programma si struttura nel seguente modo: -dichiarazione delle variabili; -inizializzazione delle variabili; -settaggio dei sensori. Poi inizia la parte di programma che viene svolta ciclicamente: -acquisizione dei valori analogici dei cinque sensori di luce; -calcolo del periodo degli impulsi per ciascun motore; -controllo casi particolari; -incremento delle variabili per la moltiplicazione del delay base; -delay. 13
 base che viene poi moltiplicato per un certo valore al fine di ottenere la durata di periodo desiderata.")
14 La struttura del software del secondo pic è più flessibile ed è costituita principalmente da sottoblocchi per la gestione dei sensori ultrasuoni. Questi sottoblocchi devono provvedere alla generazione del segnale di trigger per la richiesta di un impulso di risposta, poi devono misurare la durata dell'impulso di ritorno. Questo software gestisce direttamente i segnali di enable per i motori. I due pic comunicano attraverso la PORTB attraverso segnali prestabiliti. CAP. 10 SORGENTE DI ALIMENTAZIONE Le batterie utilizzate sono batterie LIPO a 3 celle da 11,1V, 2 ampere. Sono state scelte per la loro praticità e per la buona autonomia, inoltre sono facili da posizionare e permettono quindi di bilanciare bene il peso del robot. Necessitano di in caricabatterie apposito. 14

15 INDICE Capitolo 01 - pag. 2 Capitolo 02 - pag. 3 Capitolo 03 - pag. 4-5 Capitolo 04 - pag Capitolo 05 - pag Capitolo 06 - pag. 10 Capitolo 07 - pag Capitolo 08 - pag. 12 Capitolo 09 - pag Capitolo 10 - pag

CORSO SERALE ( TDP ) DEMOBOARD FN1Z PER PIC 16F877/16F877A
 DEMOBOARD FN1Z PER PIC 16F877/16F877A") ITIS M. PLANCK LANCENIGO DI VILLORBA (TV) A.S. 2006/07 CLASSE 4A/ SERALE Corso di elettronica e telecomunicazioni Ins. Zaniol Italo CORSO SERALE ( TDP ) DEMOBOARD FN1Z PER PIC 16F877/16F877A Presentazione
ITIS M. PLANCK LANCENIGO DI VILLORBA (TV) A.S. 2006/07 CLASSE 4A/ SERALE Corso di elettronica e telecomunicazioni Ins. Zaniol Italo CORSO SERALE ( TDP ) DEMOBOARD FN1Z PER PIC 16F877/16F877A Presentazione
minipic programmer / debugger per microcontrollori PIC Marco Calegari
 1 minipic programmer / debugger per microcontrollori PIC Marco Calegari 1 Il minipic è uno strumento mediante il quale è possibile programmare i microcontrollori della Microchip ed eseguire, su prototipi
1 minipic programmer / debugger per microcontrollori PIC Marco Calegari 1 Il minipic è uno strumento mediante il quale è possibile programmare i microcontrollori della Microchip ed eseguire, su prototipi
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
ESERCIZI - SERIE N.1
 ESERCIZI - SERIE N.1 ACQUISIZIONE DELLO STATO DI SEGNALI ON/OFF Problema: acquisizione, da parte di un'unità di elaborazione realizzata con tecnologia a funzionalità programmata, di un'informazione proveniente
ESERCIZI - SERIE N.1 ACQUISIZIONE DELLO STATO DI SEGNALI ON/OFF Problema: acquisizione, da parte di un'unità di elaborazione realizzata con tecnologia a funzionalità programmata, di un'informazione proveniente
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
A/D CON PIC 16F877. Sommario INTRODUZIONE... 2 SELEZIONARE I BANCHI... 2 ADCON0... 4 ADCS1, ADCS0... 4 CH2, CH1 E CH0... 5 GO/DONE... 6 ADON...
 A/D CON PIC 16F877 Sommario INTRODUZIONE... 2 SELEZIONARE I BANCHI... 2... 4 ADCS1, ADCS0... 4 CH2, CH1 E CH0... 5 GO/DONE... 6 ADON... 7 ESEMPIO 1... 7 ADCON1... 8 ADFM... 8 PGF3, PGF1 E PGF0... 9 ESEMPIO
A/D CON PIC 16F877 Sommario INTRODUZIONE... 2 SELEZIONARE I BANCHI... 2... 4 ADCS1, ADCS0... 4 CH2, CH1 E CH0... 5 GO/DONE... 6 ADON... 7 ESEMPIO 1... 7 ADCON1... 8 ADFM... 8 PGF3, PGF1 E PGF0... 9 ESEMPIO
Esame di Stato 2015. Materia: SISTEMI AUTOMATICI PRIMA PARTE
 Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Esame di Stato 2015 Materia: SISTEMI AUTOMATICI PRIMA PARTE Il problema proposto riguarda un sistema di acquisizione dati e controllo. I dati acquisiti sono in parte di natura digitale (misura del grado
Progetto di Eccellenza - OMAROBOT -
 Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
Controllo di un Motore Elettrico in Corrente Continua
 Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
L ELETTRONICA. Il progetto completo della scheda di interfaccia col PC tramite porta parallela e del driver da 2A per il pilotaggio dei motori
 SPECIALE CNC IL PROGETTO DELLA CNC L ELETTRONICA Il progetto completo della scheda di interfaccia col PC tramite porta parallela e del driver da 2A per il pilotaggio dei motori FIGURA 15: la scheda di
SPECIALE CNC IL PROGETTO DELLA CNC L ELETTRONICA Il progetto completo della scheda di interfaccia col PC tramite porta parallela e del driver da 2A per il pilotaggio dei motori FIGURA 15: la scheda di
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P39 10. Serie P42 12. Serie P57 14. Serie P60 16. Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Schemi di connessione 22 Codifica 23 Note 24 Motori Passo Passo
11^ parte : Come gestire i servomotori con Arduino. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 11^ parte : Come gestire i servomotori con Arduino Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Un servomotore è un dispositivo capace di eseguire dei movimenti meccanici in funzione del
11^ parte : Come gestire i servomotori con Arduino Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Un servomotore è un dispositivo capace di eseguire dei movimenti meccanici in funzione del
TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA
 TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA Molte persone (io compreso) che comprano la prima volta un LM35, lo fanno perché sono spinti da come sia facile da
TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA Molte persone (io compreso) che comprano la prima volta un LM35, lo fanno perché sono spinti da come sia facile da
Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android...
 Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sezione di PWM e Generatore di D/A Converter.
 Corso di BASCOM AVR - (34) Corso Teorico/Pratico di programmazione in BASCOM AVR. Autore: DAMINO Salvatore. Sezione di PWM e Generatore di D/A Converter. La struttura interna dei Mini Moduli è composta
Corso di BASCOM AVR - (34) Corso Teorico/Pratico di programmazione in BASCOM AVR. Autore: DAMINO Salvatore. Sezione di PWM e Generatore di D/A Converter. La struttura interna dei Mini Moduli è composta
NTC E MISURA DELLA TEMPERATURA CON ARDUINO
 NTC E MISURA DELLA TEMPERATURA CON ARDUINO Una NTC (Negative Temperature Coefficient resistenza a coefficiente di temperatura negativo) è una resistenza che cambia il suo valore con il variare della temperatura.
NTC E MISURA DELLA TEMPERATURA CON ARDUINO Una NTC (Negative Temperature Coefficient resistenza a coefficiente di temperatura negativo) è una resistenza che cambia il suo valore con il variare della temperatura.
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
INTERFACCIA PER PC MEDIANTE PORTA SERIALE
 INTERFACCIA PER PC MEDIANTE PORTA SERIALE Scheda d interfaccia per PC da collegare alla porta seriale. Consente di controllare otto uscite a relè e di leggere otto ingressi digitali e due analogici. Un
INTERFACCIA PER PC MEDIANTE PORTA SERIALE Scheda d interfaccia per PC da collegare alla porta seriale. Consente di controllare otto uscite a relè e di leggere otto ingressi digitali e due analogici. Un
O.ME.R S.p.a Via G. Galilei, 20 30035 Mirano (VE) www.omerlift.com
 www.omerlift.com") Un parcheggio sempre libero Non doversi preoccupare del parcheggio è il sogno di ogni automobilista indaffarato. Così come riuscire a parcheggiare in sicurezza in luoghi altrimenti inaccessibili. Grazie
Un parcheggio sempre libero Non doversi preoccupare del parcheggio è il sogno di ogni automobilista indaffarato. Così come riuscire a parcheggiare in sicurezza in luoghi altrimenti inaccessibili. Grazie
AURORA LUCA MARTINA GIANLUCA
 ALESSIO Team Firestorm MICHELE AURORA LUCA MARTINA GIANLUCA Quest anno il nome del robot è Rhynobot a causa del prolungamento frontale che ricorda il corno di un rinoceronte. Capitolo 1: Missioni scelte
ALESSIO Team Firestorm MICHELE AURORA LUCA MARTINA GIANLUCA Quest anno il nome del robot è Rhynobot a causa del prolungamento frontale che ricorda il corno di un rinoceronte. Capitolo 1: Missioni scelte
Programmazione dei robot
 Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Programmazione dei robot Concetti introduttivi Il kit Mindstorms NXT è un sistema che permette di costruire e programmare i robot Lego Mindstorms. Il componente principale del kit è un piccolo computer
Chiave DTMF con PIC16F84. Angelo - IT9DOA
 Chiave DTMF con PIC16F84 Angelo - IT9DOA Mettendo in ordine la mia libreria ho avuto modo di rileggere degli appunti che trattano alcuni circuiti elettronici che ho realizzato diversi anni fa e di cui
Chiave DTMF con PIC16F84 Angelo - IT9DOA Mettendo in ordine la mia libreria ho avuto modo di rileggere degli appunti che trattano alcuni circuiti elettronici che ho realizzato diversi anni fa e di cui
Sensori di temperatura a termocoppia K Guida Utente
 Sensori di temperatura a termocoppia K Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 APPLICAZIONI TIPICHE:... 2 3 NORME DI INSTALLAZIONE:... 2 3.1 Connessione elettrica su acquisitori M1 ed MD4:... 2 3.2
Sensori di temperatura a termocoppia K Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 APPLICAZIONI TIPICHE:... 2 3 NORME DI INSTALLAZIONE:... 2 3.1 Connessione elettrica su acquisitori M1 ed MD4:... 2 3.2
Capitolo 3. Iniziamo col far vedere cosa si è ottenuto, per far comprendere le successive descrizioni, avendo in mente ciò che si vuole realizzare.
 Realizzazione meccanica Iniziamo col far vedere cosa si è ottenuto, per far comprendere le successive descrizioni, avendo in mente ciò che si vuole realizzare. - 37 - 3.1 Reperibilità dei pezzi La prima
Realizzazione meccanica Iniziamo col far vedere cosa si è ottenuto, per far comprendere le successive descrizioni, avendo in mente ciò che si vuole realizzare. - 37 - 3.1 Reperibilità dei pezzi La prima
DISPOSITIVO T09 CONTROLLA GIRI E TEMPERATURA SENZA CONTATTO
 MANUALE DISPOSITIVO T09 CONTROLLA GIRI E TEMPERATURA SENZA CONTATTO EDIZIONE 06-2011 CODICE 17135 WESTCAR s.r.l. SEDE LEGALE STABILIMENTO HEAD OFFICE FACTORY Uffici Commerciali Via Venezia 31 Via Monte
MANUALE DISPOSITIVO T09 CONTROLLA GIRI E TEMPERATURA SENZA CONTATTO EDIZIONE 06-2011 CODICE 17135 WESTCAR s.r.l. SEDE LEGALE STABILIMENTO HEAD OFFICE FACTORY Uffici Commerciali Via Venezia 31 Via Monte
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale. 1/6 www.ni.com
 RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
Scanner serie i5000. Informazioni sul codice patch. A-61801_it
 Scanner serie i5000 Informazioni sul codice patch A-61801_it Informazioni sul codice patch Sommario Dettagli sul modello patch... 4 Orientamento del modello patch... 5 Dettagli sul modello di barra...
Scanner serie i5000 Informazioni sul codice patch A-61801_it Informazioni sul codice patch Sommario Dettagli sul modello patch... 4 Orientamento del modello patch... 5 Dettagli sul modello di barra...
Gamma BRUSHLESS CROUZET
 Gamma BRUSHLESS CROUZET - Presentazione La ITE Industrialtecnoelettrica Srl di Bologna (tel.5.386.6) presenta la nuova gamma Crouzet di micromotori brushless di elevata qualità con coppie da 6 e 85 mnm
Gamma BRUSHLESS CROUZET - Presentazione La ITE Industrialtecnoelettrica Srl di Bologna (tel.5.386.6) presenta la nuova gamma Crouzet di micromotori brushless di elevata qualità con coppie da 6 e 85 mnm
Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI
 ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
ESAME DI STATO Istituto Professionale Industriale Anno 2004 Indirizzo TECNICO INDUSTRIE ELETTRICHE Tema di ELETTROTECNICA, ELETTRONICA ED APPLICAZIONI Un impianto funicolare è alimentato, oltre che dalla
09-05-07. Introduzione ai microcontrollori PIC
 09-05-07 Introduzione ai microcontrollori PIC Daniele Beninato: Nicola Trivellin: beninato@dei.unipd.it trive1@tin.it Che cosa è un microcontrollore? Un microcontrollore è un sistema a microprocessore
09-05-07 Introduzione ai microcontrollori PIC Daniele Beninato: Nicola Trivellin: beninato@dei.unipd.it trive1@tin.it Che cosa è un microcontrollore? Un microcontrollore è un sistema a microprocessore
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
ZIMO. Decoder per accessori MX81. Manuale istruzioni del. nella variante MX81/N per il formato dei dati NMRA-DCC
 ZIMO Manuale istruzioni del Decoder per accessori MX81 nella variante MX81/N per il formato dei dati NMRA-DCC etichetta verde Sommario 1. GENERALITÀ... 3 2. CARATTERISTICHE E DATI TECNICI... 3 3. COLLEGAMENTO
ZIMO Manuale istruzioni del Decoder per accessori MX81 nella variante MX81/N per il formato dei dati NMRA-DCC etichetta verde Sommario 1. GENERALITÀ... 3 2. CARATTERISTICHE E DATI TECNICI... 3 3. COLLEGAMENTO
Inclinometro Omnidirezionale Modello 400B 401B
 Inclinometro Omnidirezionale Modello 400B 401B CARATTERISTICHE: CARATTERISTICHE TECNICHE: Stendalto s.r.l. Via Provinciale Est, 16 40053 Bazzano (BO) Italia Uff. tecnico-comm.: tel. 0 5 1-8 3 4 0 7 0 (r.a.)
Inclinometro Omnidirezionale Modello 400B 401B CARATTERISTICHE: CARATTERISTICHE TECNICHE: Stendalto s.r.l. Via Provinciale Est, 16 40053 Bazzano (BO) Italia Uff. tecnico-comm.: tel. 0 5 1-8 3 4 0 7 0 (r.a.)
GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012
 GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012 L unità di Milano Città Studi del Centro matematita propone anche per l a.s. 2011-2012 una serie di problemi pensati per
GIOCHI MATEMATICI PER LA SCUOLA SECONDARIA DI I GRADO ANNO SCOLASTICO 2011-2012 L unità di Milano Città Studi del Centro matematita propone anche per l a.s. 2011-2012 una serie di problemi pensati per
MONITORAGGIO ACQUEDOTTO MANUALE UTENTE
 MONITORAGGIO ACQUEDOTTO MANUALE UTENTE Comune di Saint-Marcel I.S.I.T.I.P Verres SOMMARIO OBIETTIVO... 3 SCHEMA GENERALE E DESCRIZIONE DEL FUNZIONAMENTO... 4 INSTALLAZIONE... 5 Installazione sensore...
MONITORAGGIO ACQUEDOTTO MANUALE UTENTE Comune di Saint-Marcel I.S.I.T.I.P Verres SOMMARIO OBIETTIVO... 3 SCHEMA GENERALE E DESCRIZIONE DEL FUNZIONAMENTO... 4 INSTALLAZIONE... 5 Installazione sensore...
8 Microcontrollori PIC
 8 Microcontrollori PIC 8.1 Descrizione generale Un microcontrollore è un dispositivo elettronico che opportunamente programmato è in grado di svolgere diverse funzioni in modo autonomo. Essenzialmente
8 Microcontrollori PIC 8.1 Descrizione generale Un microcontrollore è un dispositivo elettronico che opportunamente programmato è in grado di svolgere diverse funzioni in modo autonomo. Essenzialmente
PLC Programmable Logic Controller
 PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
MANUALE DEL SISTEMA DEI CONDOTTI D ARIA EASYFLOW
 MANUALE DEL SISTEMA DEI CONDOTTI D ARIA EASYFLOW A B G F C D E 2 DESCRIZIONE DEL SISTEMA (vedi figura pagina a sinistra). Il sistema dei condotti d aria EasyFlow è un sistema flessibile per le applicazioni
MANUALE DEL SISTEMA DEI CONDOTTI D ARIA EASYFLOW A B G F C D E 2 DESCRIZIONE DEL SISTEMA (vedi figura pagina a sinistra). Il sistema dei condotti d aria EasyFlow è un sistema flessibile per le applicazioni
FREE 50 R / FREE 50 RS
 I FREE 50 R: Trigger mani libere con segnale di rilevamento di presenza per rilevare di presenza esterno. FREE 50 RS: Trigger mani libere con segnale di rilevamento di presenza e rilevare di presenza incorporato
I FREE 50 R: Trigger mani libere con segnale di rilevamento di presenza per rilevare di presenza esterno. FREE 50 RS: Trigger mani libere con segnale di rilevamento di presenza e rilevare di presenza incorporato
POLIFEMO LIGHT Manuale di Riferimento Release 2.0
 POLIFEMO LIGHT Manuale di Riferimento Release 2.0 Microgate s.r.l. Via Stradivari, 4 Stradivaristr. 39100 BOLZANO - BOZEN ITALY Pagina 2 di 8 1. INDICE 1. INDICE...2 2. PRESENTAZIONE...3 3. POLIFEMO-LIGHT...4
POLIFEMO LIGHT Manuale di Riferimento Release 2.0 Microgate s.r.l. Via Stradivari, 4 Stradivaristr. 39100 BOLZANO - BOZEN ITALY Pagina 2 di 8 1. INDICE 1. INDICE...2 2. PRESENTAZIONE...3 3. POLIFEMO-LIGHT...4
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 51-56025 PONTEDERA (PI)
") ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: 4AE DISCIPLINA: Tecnologia e Progettazione di Sistemi Elettrici ed Elettronici - pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE
ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: 4AE DISCIPLINA: Tecnologia e Progettazione di Sistemi Elettrici ed Elettronici - pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE
SISTEMA DI CONTROLLO REMOTO DRC Decsa Remote Check
 Decsa srl I-27058 Voghera (Italy) / Via Cappelletta 1 Tel. ++39 0383 6941.1 / Fax 0383 62244 www.decsa.it / e-mail:info@decsa.it SISTEMA DI CONTROLLO REMOTO DRC Decsa Remote Check Cap. Soc. 500.000 int.
Decsa srl I-27058 Voghera (Italy) / Via Cappelletta 1 Tel. ++39 0383 6941.1 / Fax 0383 62244 www.decsa.it / e-mail:info@decsa.it SISTEMA DI CONTROLLO REMOTO DRC Decsa Remote Check Cap. Soc. 500.000 int.
K2570 MODULO ALIMENTATORE UNIVERSALE 5-14DC / 1A ISTRUZIONI DI MONTAGGIO
 Punti di saldatura totali: 18 Livello di difficoltà: principiante 1 2 3 4 5 avanzato MODULO ALIMENTATORE UNIVERSALE 5-14DC / 1A K2570 La soluzione ideale per alimentare i vostri circuiti. ISTRUZIONI DI
Punti di saldatura totali: 18 Livello di difficoltà: principiante 1 2 3 4 5 avanzato MODULO ALIMENTATORE UNIVERSALE 5-14DC / 1A K2570 La soluzione ideale per alimentare i vostri circuiti. ISTRUZIONI DI
IT ARCHIMEDE di Catania. Prima squadra di RESCUE. Report di DOCUMENTAZIONE
 IT ARCHIMEDE di Catania Prima squadra di RESCUE Report di DOCUMENTAZIONE 1 - DATI GENERALI Nome della squadra: UNCLE PETER Docente responsabile: Pietro Arcidiacono Alunni che compongono la squadra: 1)
IT ARCHIMEDE di Catania Prima squadra di RESCUE Report di DOCUMENTAZIONE 1 - DATI GENERALI Nome della squadra: UNCLE PETER Docente responsabile: Pietro Arcidiacono Alunni che compongono la squadra: 1)
OSCILLATORI AL QUARZO: CONTASECONDI
 ... OSCILLATORI AL QUARZO: CONTASECONDI di Maurizio Del Corso m.delcorso@farelettronica.com Come può un cristallo di quarzo oscillare ad una determinata frequenza? Quale spiegazione fisica c è dietro a
... OSCILLATORI AL QUARZO: CONTASECONDI di Maurizio Del Corso m.delcorso@farelettronica.com Come può un cristallo di quarzo oscillare ad una determinata frequenza? Quale spiegazione fisica c è dietro a
BIOMECCANICA A A 2 0 11-2 0 1 2. P r o f. s s a M a r i a G u e r r i s i D o t t. P i e t r o P i c e r n o
 A A 2 0 11-2 0 1 2 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 11-2 0 1 2 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
L ultima frontiera dei LED
 L ultima frontiera dei LED CONTENUTI 1. Considerazioni Generali ed Esempi di Applicazione 2. Vantaggi nell utilizzo della tecnologia a LED 3. Schede Tecniche dei Prodotti 4. Legenda della Nomenclatura
L ultima frontiera dei LED CONTENUTI 1. Considerazioni Generali ed Esempi di Applicazione 2. Vantaggi nell utilizzo della tecnologia a LED 3. Schede Tecniche dei Prodotti 4. Legenda della Nomenclatura
Nastri trasportatori a curva
 Nastri trasportatori a curva Informazioni generali OMT BIELLA Srl Grazie all esperienza acquisita nel corso degli anni OMT Biella Srl offre una gamma di trasportatori a curva in grado di soddisfare le
Nastri trasportatori a curva Informazioni generali OMT BIELLA Srl Grazie all esperienza acquisita nel corso degli anni OMT Biella Srl offre una gamma di trasportatori a curva in grado di soddisfare le
I componenti di un Sistema di elaborazione. CPU (central process unit)
") I componenti di un Sistema di elaborazione. CPU (central process unit) I componenti di un Sistema di elaborazione. CPU (central process unit) La C.P.U. è il dispositivo che esegue materialmente gli ALGORITMI.
I componenti di un Sistema di elaborazione. CPU (central process unit) I componenti di un Sistema di elaborazione. CPU (central process unit) La C.P.U. è il dispositivo che esegue materialmente gli ALGORITMI.
Scopi: CARATTERISTICHE GENERALI: Struttura: Movimento: progetto realizzato da: (ALPHA TEAM)
") progetto realizzato da: (ALPHA TEAM) Bisio Giulio,Dal Bianco Davide, Greselin Matteo, Filippi Nicolò Relazione a cura di : Bisio Giulio Scopi: Il progetto nasce dalla voglia di realizzare un robot che
progetto realizzato da: (ALPHA TEAM) Bisio Giulio,Dal Bianco Davide, Greselin Matteo, Filippi Nicolò Relazione a cura di : Bisio Giulio Scopi: Il progetto nasce dalla voglia di realizzare un robot che
PHLEGON solar GmbH. PV Tracking Compact System. PV Tracking Compact System un INNOVAZIONE di successo!
 PHLEGON solar GmbH Valido dal: giugno 2011 PHLEGON mover PV Tracking Compact System PV Tracking Compact System un INNOVAZIONE di successo! Design modulare del sistema PHLEGON mover Compact System permette
PHLEGON solar GmbH Valido dal: giugno 2011 PHLEGON mover PV Tracking Compact System PV Tracking Compact System un INNOVAZIONE di successo! Design modulare del sistema PHLEGON mover Compact System permette
Impianti per il trasferimento di energia
 Capitolo 2 Impianti per il trasferimento di energia 2.1 2.1 Introduzione In molte zone di un velivolo è necessario disporre di energia, in modo controllato; questo è necessario per molte attività, ad esempio
Capitolo 2 Impianti per il trasferimento di energia 2.1 2.1 Introduzione In molte zone di un velivolo è necessario disporre di energia, in modo controllato; questo è necessario per molte attività, ad esempio
Progetto di un sistema di controllo per un robot basato su CAN
 Progetto di un sistema di controllo per un robot basato su CAN Laurea in Ingegneria Informatica ed Elettronica Università degli Studi di Perugia Facoltà di Ingegneria Candidato: Giulio Spinozzi Relatore:
Progetto di un sistema di controllo per un robot basato su CAN Laurea in Ingegneria Informatica ed Elettronica Università degli Studi di Perugia Facoltà di Ingegneria Candidato: Giulio Spinozzi Relatore:
RIF FI 005 ABS + - 15/54 (!) K 11 15/54. Stop - 1 RR LR RF LF
 K 11 15/54. Stop - 1 RR LR RF LF") FI 00 B 0 30 / 0 0 F E B (!) 0 K / top LR 3 3 3 LF RR 0 RF B M C RR LR RF LF D FI 00 B ) Gruppo elettroidraulico con centralina B ( pin ) ( vano motore lato sinistro ) ) ensore giri ruota anteriore destra
FI 00 B 0 30 / 0 0 F E B (!) 0 K / top LR 3 3 3 LF RR 0 RF B M C RR LR RF LF D FI 00 B ) Gruppo elettroidraulico con centralina B ( pin ) ( vano motore lato sinistro ) ) ensore giri ruota anteriore destra
MESSA IN SCALA DI ALGORITMI DIGITALI
 Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Ingegneria e Tecnologie dei Sistemi di Controllo Laurea Specialistica in Ingegneria Meccatronica MESSA IN SCALA DI ALGORITMI DIGITALI Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Classe 3 D Bucci Arianna Evangelista Andrea Palombo Leonardo Ricci Alessia Progetto di Scienze a.s. 2013/2014. Prof.ssa Piacentini Veronica
 Classe 3 D Bucci Arianna Evangelista Andrea Palombo Leonardo Ricci Alessia Progetto di Scienze a.s. 2013/2014 Prof.ssa Piacentini Veronica La corrente elettrica La corrente elettrica è un flusso di elettroni
Classe 3 D Bucci Arianna Evangelista Andrea Palombo Leonardo Ricci Alessia Progetto di Scienze a.s. 2013/2014 Prof.ssa Piacentini Veronica La corrente elettrica La corrente elettrica è un flusso di elettroni
Trasmissione di dati al di fuori di un area locale avviene tramite la commutazione
 Commutazione 05.2 Trasmissione di dati al di fuori di un area locale avviene tramite la Autunno 2002 Prof. Roberto De Prisco -05: Reti a di circuito Università degli studi di Salerno Laurea e Diploma in
Commutazione 05.2 Trasmissione di dati al di fuori di un area locale avviene tramite la Autunno 2002 Prof. Roberto De Prisco -05: Reti a di circuito Università degli studi di Salerno Laurea e Diploma in
La verifica della coerenza del nostro budget rispetto ai vincoli dei bandi o del finanziatore
 La verifica della coerenza del nostro budget rispetto ai vincoli dei bandi o del finanziatore Dopo aver quantificato economicamente le risorse necessarie ad implementare le azioni previste per raggiungere
La verifica della coerenza del nostro budget rispetto ai vincoli dei bandi o del finanziatore Dopo aver quantificato economicamente le risorse necessarie ad implementare le azioni previste per raggiungere
Corso Base Arduino ed Elettronica
 Corso Base Arduino ed Elettronica Secondo incontro Saldatura e Relatore: Roberto Beligni rbeligni@altratecnoloiga.com L'ambiente di sviluppo L'ambiente di sviluppo di Arduino (Chiamato IDE) facilita la
Corso Base Arduino ed Elettronica Secondo incontro Saldatura e Relatore: Roberto Beligni rbeligni@altratecnoloiga.com L'ambiente di sviluppo L'ambiente di sviluppo di Arduino (Chiamato IDE) facilita la
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
Sistema di diagnosi CAR TEST
 Data: 30/09/09 1 di 7 Sistema di diagnosi CAR TEST Il sistema di diagnosi CAR TEST venne convenientemente utilizzato per: - verificare che la scocca di un veicolo sia dimensionalmente conforme ai disegni
Data: 30/09/09 1 di 7 Sistema di diagnosi CAR TEST Il sistema di diagnosi CAR TEST venne convenientemente utilizzato per: - verificare che la scocca di un veicolo sia dimensionalmente conforme ai disegni
lampade sia T3 che T5.
 Riparare le Plafoniere degli acquari Juwel serie RIO e Vision con lampade sia T3 che T5. Le plafoniere degli acquari Juwel serie Rio e Vision sono costituite da due blocchi principali termosaldati : Il
Riparare le Plafoniere degli acquari Juwel serie RIO e Vision con lampade sia T3 che T5. Le plafoniere degli acquari Juwel serie Rio e Vision sono costituite da due blocchi principali termosaldati : Il
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA
 MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
MODELLIZZAZIONE, CONTROLLO E MISURA DI UN MOTORE A CORRENTE CONTINUA ANDREA USAI Dipartimento di Informatica e Sistemistica Antonio Ruberti Andrea Usai (D.I.S. Antonio Ruberti ) Laboratorio di Automatica
S.A.I.? Servizio Accoglienza e Informazione. Roberta Speziale Responsabile ufficio stampa, comunicazione e S.A.I.? Anffas Onlus Nazionale
 S.A.I.? Servizio Accoglienza e Informazione Roberta Speziale Responsabile ufficio stampa, comunicazione e S.A.I.? Anffas Onlus Nazionale Carta dei Servizi Anffas Onlus Milano, dicembre 2004 Per le Associazioni
S.A.I.? Servizio Accoglienza e Informazione Roberta Speziale Responsabile ufficio stampa, comunicazione e S.A.I.? Anffas Onlus Nazionale Carta dei Servizi Anffas Onlus Milano, dicembre 2004 Per le Associazioni
Architetture Applicative
 Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
Il sensore rilevatore di presenza modalità d uso
 SENSORE RILEVATORE DI PRESENZA Il sensore rilevatore di presenza modalità d uso I moduli pic-sms seriali e le versioni professionali con gsm integrato sono di fatto anche dei veri e propri sistemi d allarme
SENSORE RILEVATORE DI PRESENZA Il sensore rilevatore di presenza modalità d uso I moduli pic-sms seriali e le versioni professionali con gsm integrato sono di fatto anche dei veri e propri sistemi d allarme
Corso di Informatica Industriale
 Corso di Informatica Industriale Prof. Giorgio Buttazzo Dipartimento di Informatica e Sistemistica Università di Pavia E-mail: buttazzo@unipv.it Informazioni varie Telefono: 0382-505.755 Email: Dispense:
Corso di Informatica Industriale Prof. Giorgio Buttazzo Dipartimento di Informatica e Sistemistica Università di Pavia E-mail: buttazzo@unipv.it Informazioni varie Telefono: 0382-505.755 Email: Dispense:
Motore passo passo: Laboratorio di Elettronica 1
 Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Volete caricare "separatamente" una seconda batteria da un alternatore o da un carica batteria a singola uscita?..
 EQUIPAGIAMENTI ELETTRICI PER MEZZI MOBILI Corso ROSSELLI 119-10129 TORINO TEL 011,3040082 FAX 011,19837717 e-mail: info4x4@teknautic.com Volete caricare "separatamente" una seconda batteria da un alternatore
EQUIPAGIAMENTI ELETTRICI PER MEZZI MOBILI Corso ROSSELLI 119-10129 TORINO TEL 011,3040082 FAX 011,19837717 e-mail: info4x4@teknautic.com Volete caricare "separatamente" una seconda batteria da un alternatore
Una scuola vuole monitorare la potenza elettrica continua di un pannello fotovoltaico
 ESAME DI STATO PER ISTITUTI PROFESSIONALI Corso di Ordinamento Indirizzo: Tecnico delle industrie elettroniche Tema di: Elettronica, telecomunicazioni ed applicazioni Gaetano D Antona Il tema proposto
ESAME DI STATO PER ISTITUTI PROFESSIONALI Corso di Ordinamento Indirizzo: Tecnico delle industrie elettroniche Tema di: Elettronica, telecomunicazioni ed applicazioni Gaetano D Antona Il tema proposto
Alimentazione Switching con due schede ATX.
 Alimentazione Switching con due schede ATX. Alimentatore Switching finito 1 Introduzione...2 2 Realizzazione supporto...2 3 Realizzazione Elettrica...5 4 Realizzazione meccanica...7 5 Montaggio finale...9
Alimentazione Switching con due schede ATX. Alimentatore Switching finito 1 Introduzione...2 2 Realizzazione supporto...2 3 Realizzazione Elettrica...5 4 Realizzazione meccanica...7 5 Montaggio finale...9
A A 2 0 1 2-2 0 1 3 BIOMECCANICA. P i e t r o P i c e r n o, P h D
 A A 2 0 1 2-2 0 1 3 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
A A 2 0 1 2-2 0 1 3 U N I V E R S I TA D E G L I S T U D I D I R O M A T O R V E R G ATA FA C O LTA D I M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como LOGICA DI CONTROLLO
 Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
Logiche di controllo LOGICA DI CONTROLLO Una automazione può, oggi, essere realizzata secondo due diverse tecnologie. In passato la logica di controllo era implementata (realizzata) attraverso la tecnologia
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra: Team LMT Istituto: I.T.I.S A.Rossi ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra: Team LMT Istituto: I.T.I.S A.Rossi ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
WATER PRINTER. Premessa
 WATER PRINTER Premessa Il progetto è apparso subito di notevole complessità e rilevante impegno economico; lo sviluppo del progetto è iniziato con un gruppo di alunni della classe 4B dell anno scolastico
WATER PRINTER Premessa Il progetto è apparso subito di notevole complessità e rilevante impegno economico; lo sviluppo del progetto è iniziato con un gruppo di alunni della classe 4B dell anno scolastico
GW 90 762: ATTUATORE ANALOGICO
 FUNZIONE MONTAGGIO L Attuatore Analogico a due canali serve a estendere la gamma di applicazione dell EIB tramite l elaborazione di grandezze analogiche. Per controllare variabili differenti (es. servomotore)
FUNZIONE MONTAGGIO L Attuatore Analogico a due canali serve a estendere la gamma di applicazione dell EIB tramite l elaborazione di grandezze analogiche. Per controllare variabili differenti (es. servomotore)
63 7. Quale geometria per la computer grafica? 75 8. L omografia e l affinità nella digitalizzazione e georeferenziazione
 Indice 7 Presentazione 9 Premessa 11 Introduzione 13 1. Rilevamento ed oggetto 19 2. La stazione totale 23 3. La procedura generale 33 4. Dai punti al modello tridimensionale 45 5. Il modello tridimensionale
Indice 7 Presentazione 9 Premessa 11 Introduzione 13 1. Rilevamento ed oggetto 19 2. La stazione totale 23 3. La procedura generale 33 4. Dai punti al modello tridimensionale 45 5. Il modello tridimensionale
RECLAMO ANNO. Data di invio Firma Il reclamo risulta: privo di riscontro Il Responsabile del processo: Il Dirigente Scolastico
 RECLAMO N. ANNO Il sottoscritto:..residente a:.... Prov.. in Via. Tel.: genitore dell alunno: frequentante per l anno scolastico: la classe:.. sezione insegnante della classe:. personale ATA COMUNICA CHE
RECLAMO N. ANNO Il sottoscritto:..residente a:.... Prov.. in Via. Tel.: genitore dell alunno: frequentante per l anno scolastico: la classe:.. sezione insegnante della classe:. personale ATA COMUNICA CHE
Università degli Studi di L Aquila. Facoltà di Ingegneria. Corso di Laurea in Ingegneria Elettronica Corso di Sistemi Informativi
 Università degli Studi di L Aquila Facoltà di Ingegneria Corso di Laurea in Ingegneria Elettronica Corso di Sistemi Informativi Prof. Gaetanino Paolone Dott. Ottavio Pascale a.a.2003-2004 Progetto Campo
Università degli Studi di L Aquila Facoltà di Ingegneria Corso di Laurea in Ingegneria Elettronica Corso di Sistemi Informativi Prof. Gaetanino Paolone Dott. Ottavio Pascale a.a.2003-2004 Progetto Campo
M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO. Indirizzo: ELETTRONICA E TELECOMUNICAZIONI
 M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTIALE COSO DI ODINAMENTO Indirizzo: ELETTONICA E TELECOMUNICAZIONI Tema di: ELETTONICA (Testo valevole per i corsi di ordinamento e per i corsi del progetto
M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTIALE COSO DI ODINAMENTO Indirizzo: ELETTONICA E TELECOMUNICAZIONI Tema di: ELETTONICA (Testo valevole per i corsi di ordinamento e per i corsi del progetto
La soluzione perfetta per un agile carrozzina elettronica da interni
 La soluzione perfetta per un agile carrozzina elettronica da interni Performance Ottima performance di guida grazie ad una eccellente trazione centrale Dimensioni compatte 63 cm di larghezza totale Raggio
La soluzione perfetta per un agile carrozzina elettronica da interni Performance Ottima performance di guida grazie ad una eccellente trazione centrale Dimensioni compatte 63 cm di larghezza totale Raggio
Cenni sui trasduttori. Con particolare attenzione al settore marittimo
 Cenni sui trasduttori Con particolare attenzione al settore marittimo DEFINIZIONI Un Trasduttore è un dispositivo che converte una grandezza fisica in un segnale di natura elettrica Un Sensore è l elemento
Cenni sui trasduttori Con particolare attenzione al settore marittimo DEFINIZIONI Un Trasduttore è un dispositivo che converte una grandezza fisica in un segnale di natura elettrica Un Sensore è l elemento
Lo Sportello Informativo on line La tua Regione a portata di mouse
 UNIONE EUROPEA REGIONE CALABRIA REPUBBLICA ITALIANA Per favorire il dialogo con i cittadini la Regione Calabria lancia lo sportello informativo, il servizio on line che consente di avere, in tempi certi,
UNIONE EUROPEA REGIONE CALABRIA REPUBBLICA ITALIANA Per favorire il dialogo con i cittadini la Regione Calabria lancia lo sportello informativo, il servizio on line che consente di avere, in tempi certi,
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
CORSO DI INFORMATICA. Docente: Erick Baldi Classi: 1AP, 1BP, 2AP, 3AP Sito del corso: www.infoisicast.netsons.org
 CORSO DI INFORMATICA Docente: Erick Baldi Classi: 1AP, 1BP, 2AP, 3AP Sito del corso: www.infoisicast.netsons.org Perchè insegnare informatica? L'informatica è una attività che copre molti campi applicativi
CORSO DI INFORMATICA Docente: Erick Baldi Classi: 1AP, 1BP, 2AP, 3AP Sito del corso: www.infoisicast.netsons.org Perchè insegnare informatica? L'informatica è una attività che copre molti campi applicativi
NASTRO TRASPORTATORE CON PIC
 NASTRO TRASPORTATORE CON PIC prof. Fusco Ferdinando NASTRO TRASPORTATORE CON PIC Il nastro trasportatore svolge le seguenti funzioni: Trasporto pezzi. Asciugatura pezzi. Scarto pezzi di dimensione superiore
NASTRO TRASPORTATORE CON PIC prof. Fusco Ferdinando NASTRO TRASPORTATORE CON PIC Il nastro trasportatore svolge le seguenti funzioni: Trasporto pezzi. Asciugatura pezzi. Scarto pezzi di dimensione superiore
QUESTO E IL NOSTRO CUORE
 QUESTO E IL NOSTRO CUORE Classe V Scuola Primaria Fase di engage Per comprendere meglio alcuni significati che collegano la pratica motoria alla salute del nostro cuore, in questa fase la classe viene
QUESTO E IL NOSTRO CUORE Classe V Scuola Primaria Fase di engage Per comprendere meglio alcuni significati che collegano la pratica motoria alla salute del nostro cuore, in questa fase la classe viene
Valutazione delle Prestazioni. Valutazione delle Prestazioni. Architetture dei Calcolatori (Lettere. Tempo di risposta e throughput
 Valutazione delle Prestazioni Architetture dei Calcolatori (Lettere A-I) Valutazione delle Prestazioni Prof. Francesco Lo Presti Misura/valutazione di un insieme di parametri quantitativi per caratterizzare
Valutazione delle Prestazioni Architetture dei Calcolatori (Lettere A-I) Valutazione delle Prestazioni Prof. Francesco Lo Presti Misura/valutazione di un insieme di parametri quantitativi per caratterizzare
APPLICATION SHEET Luglio
 Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
Indice 1. Descrizione dell applicazione 2. Applicazione - Dati 3. Selezione del prodotto e dimensionamento 4. Soluzione Motovario 1. Descrizione dell applicazione Gli schermi per campi da cricket fanno
M1600 Ingresso/Uscita parallelo
 M1600 Ingresso / uscita parallelo M1600 Ingresso/Uscita parallelo Descrizione tecnica Eiserstraße 5 Telefon 05246/963-0 33415 Verl Telefax 05246/963-149 Data : 12.7.95 Versione : 2.0 Pagina 1 di 14 M1600
M1600 Ingresso / uscita parallelo M1600 Ingresso/Uscita parallelo Descrizione tecnica Eiserstraße 5 Telefon 05246/963-0 33415 Verl Telefax 05246/963-149 Data : 12.7.95 Versione : 2.0 Pagina 1 di 14 M1600
La propagazione della luce in una fibra ottica
 La propagazione della luce in una fibra ottica La rifrazione della luce Consideriamo due mezzi trasparenti alla luce, separati da una superficie piana. Il primo mezzo ha indice di rifrazione n, il secondo
La propagazione della luce in una fibra ottica La rifrazione della luce Consideriamo due mezzi trasparenti alla luce, separati da una superficie piana. Il primo mezzo ha indice di rifrazione n, il secondo
Reti sequenziali. Esempio di rete sequenziale: distributore automatico.
 Reti sequenziali 1 Reti sequenziali Nelle RETI COMBINATORIE il valore logico delle variabili di uscita, in un dato istante, è funzione solo dei valori delle variabili di ingresso in quello stesso istante.
Reti sequenziali 1 Reti sequenziali Nelle RETI COMBINATORIE il valore logico delle variabili di uscita, in un dato istante, è funzione solo dei valori delle variabili di ingresso in quello stesso istante.
RISTOFIERE GESTIONE BAR, RISTORANTI, SAGRE E FESTE DI PAESE. Visita il nostro sito per tutti i nostri prodotti www.ttsoft.it
 RISTOFIERE GESTIONE BAR, RISTORANTI, SAGRE E FESTE DI PAESE Visita il nostro sito per tutti i nostri prodotti www.ttsoft.it RISTOFIERE TTSoft presenta un programma realizzato con tecnologie di ultima generazione
RISTOFIERE GESTIONE BAR, RISTORANTI, SAGRE E FESTE DI PAESE Visita il nostro sito per tutti i nostri prodotti www.ttsoft.it RISTOFIERE TTSoft presenta un programma realizzato con tecnologie di ultima generazione
Manuale istruzioni. Rivelatore di presenza art. 20850-19850-16850-14850 Manuale per l'installatore
 Manuale istruzioni Rivelatore di presenza art. 20850-19850-16850-14850 Manuale per l'installatore Indice ARATTERISTIHE GENERALI E FUNZIONALITA' da pag. 5 OGGETTI I OMUNIAZIONE E PARAMETRI ETS da pag. 6
Manuale istruzioni Rivelatore di presenza art. 20850-19850-16850-14850 Manuale per l'installatore Indice ARATTERISTIHE GENERALI E FUNZIONALITA' da pag. 5 OGGETTI I OMUNIAZIONE E PARAMETRI ETS da pag. 6
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198
 SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
SCHEDA DI CONTROLLO MOTORE BRUSHLESS BBL_198 MANUALE D USO E DOCUMENTAZIONE DESCRIZIONE PAG. 1 CARATTERISTICHE E SPECIFICHE 1 SCHEMA A BLOCCHI 2 FUNZIONAMENTO E USO DISPOSITIVO 3 LAYOUT DISPOSITIVO 4 DESCRIZIONE
Istruzioni di montaggio accensione a rotore interno Stage6 Piaggio & Minarelli
 Istruzioni di montaggio accensione a rotore interno Stage6 Piaggio & Minarelli Le figure 1 e 1.1. mostrano i componenti contenuti nella confezione. Il piattello di appesantimento non è fornito in dotazione,
Istruzioni di montaggio accensione a rotore interno Stage6 Piaggio & Minarelli Le figure 1 e 1.1. mostrano i componenti contenuti nella confezione. Il piattello di appesantimento non è fornito in dotazione,
Architettura hardware
 Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Circuiti amplificatori
 Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore
Circuiti amplificatori G. Traversi Strumentazione e Misure Elettroniche Corso Integrato di Elettrotecnica e Strumentazione e Misure Elettroniche 1 Amplificatori 2 Amplificatori Se A V è negativo, l amplificatore