Fondamenti di Robotica Autonoma
|
|
|
- Rosalinda Papa
- 9 anni fa
- Просмотров:
Транскрипт
1 Donato Di Paola mobile autonoma 2008

2 Contenuti Controllo Sensori Attuatori CONCETTI CHIAVE Robot Robot Mobile Robot Mobile Autonomo DEFINIZIONI FONDAMENTALI Manipolatori Robot Per Ricerca DOMINI APPLICATIVI Robot Umanoidi Robot di Servizio Veicoli Autonomi 2

3 DEFINIZIONI A.2 Elementi Strutturali Fondamentali 3

4 Definizioni Fondamentali Cos èunrobot? Unrobotèunamacchinachesente,pensaedagisce.! Interazione intelligente conl ambiente 4
5 Definizioni Fondamentali InterazioneIntelligente SENSORI Percezione ATTUATORI ROBOT Azione AMBIENTE 5

6 Definizioni Fondamentali Cosasiintendeperrobotmobili? Unrobotmobileèunrobotchepuòmuoversi,nellasua interezza,nellospazio.questotipodirobotè,disolito,dotatodi ruote,cingoliogambechenepermet tonolacompletamobilità. Cosasiintendeperrobotautonomi? Conilterminerobotautonomocisiriferiscearobotcapacidi operarenelmondorealesenzaalcunaformadicontrollo esternoperlunghiperiodiditempo. 6

7 CONCETTI CHIAVE A.2 Elementi Strutturali Fondamentali 7

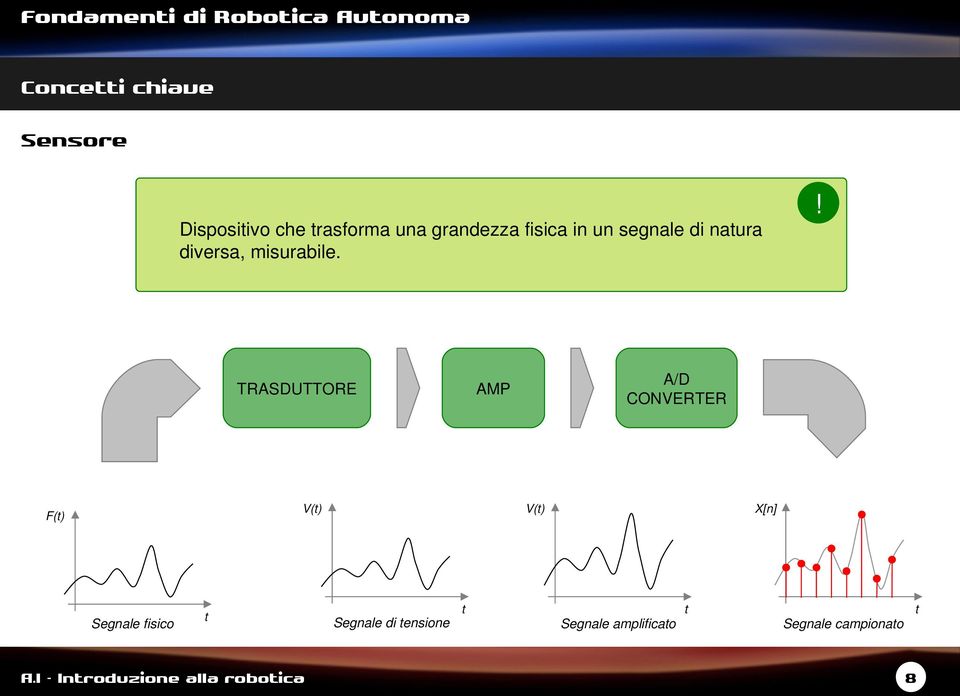
8 Concetti chiave Sensore Dispositivochetrasformaunagrandezzafisicainunsegnaledinatura diversa,misurabile. TRASDUTTORE Segnalefisico t A/D CONVERTER AMP V(t) F(t) V(t) Segnaleditensione t X[n] Segnaleamplificato! t Segnalecampionato t 8
9 Concetti chiave Attuatore Unattuatoreèunmeccanismoattraversoilqualeunagente(insenso astratto)agiscesull ambienteesterno. D/A CONVERTER AMP V(t) ATTUATORE F(t) V(t) 1 SegnaleDigitale! Segnaleditensione t Segnaleamplificato t Segnalefisico t 9
 0 1 0 1 1 0 0 ATTUATORE F(t) V(t) 1")
10 Concetti chiave Controllo Ilcontrolloèl insiemediquellemetodologiechepermettonodisfruttare leinformazionisensorialeperottenereun azione,nelmondoreale, correttaeaccurata. Riferimento Azionedi controllo Errore CONTROLLORE! Uscita ATTUATORE SENSORE Retroazione 10

11 Connessioni TEORIA DEL CONTROLLO ELETTRONICA MECCANICA INGEGNERIA FISICA OTTICA VISIONE ARTIFICIALE ROBOTICA ELABORAZIONE DELLE IMMAGINI MATEMATICA INFORMATICA ALGEBRA SOFT COMPUTING INTELLIGENZA ARTIFICIALE GEOMETRIA ANALISI MATEMATICA 11

12 DOMINI APPLICATIVI A.2 Elementi Strutturali Fondamentali 12

13 Domini Applicativi Manipolatori Industriali Irobotindustrialisonoutilizzatiperautomatizzare processiripetitiviechepotrebberonuocere all uomo. Saldatura Assemblaggio Verniciatura Caricoescaricodimaterialipesanti Ambitidiutilizzo: Catenediproduzioneautomobilistiche Produzionedicomponentimeccaniche(alta precisione) 13

14 Domini Applicativi Manipolatori Industriali INDUSTRIAL ROBOTS Assemblaggio KUKA ConcettiFondamentali Gradidilibertà(DoF) Lediversedirezioniincuipuòmuoversiuncorporigido Traiettoriapredeterminata Letraiettoriedimovimentonellospaziosonopredeterminate Utilizzodisensoriperottenereunfeedback Letraiettoriesiadattanoagliinputambientali 14

15 Domini Applicativi Robot per la ricerca Irobotperscopidiricercavengonoprogettatie costruitialfinedisperimentaretecnologieinnovative emetodologiecapacidirendereirobotsemprepiù intelligenti. Ambitidiutilizzo: Sperimentazionidinuovetecnologie Sperimentazionedinuovemetodologiedicontrollo Sperimentazionedialgoritmidiintelligenza artificiale Sperimentazionedisensoriinnovativi 15

16 Domini Applicativi Robot per la ricerca SWARM ROBOTICS Laswarmrobotics(roboticadisciame)èunapproccioperla coordinazionedisistemimultirobot. L ideasucuisibasaquestoapproccioècheil comportamentocollettivoemergedalleinterazionefrairobot edall interazionedeirobotconl ambienteesterno. Intro EPFL Clustering Dispersione Followtheleader Ilnomediquestoinsiemeditecnichederiva dall osservazionedelcomportamentodeigruppidianimali, tipicamenteinsetti. Scorta Formationcontrol 16

17 Domini Applicativi Veicoli Autonomi Iveicoliautonomisonomezzicapacidimuoversi autonomamente,senzalaguidadell uomo, nell ambienteperilqualesonostatiprogettati. Tipicamenteiveicoliautonomisonoquelli terrestri,maesistonoanchevelivoliautonomie mezzisottomarini. Ambitidiutilizzo: Scopimilitari Ricercascientifica Monitoraggioedesplorazione 17

18 Domini Applicativi Veicoli Autonomi IlDARPAGRANDCHALLENGEèunagaraper veicoliautonomiinambitourbano(sponsorizzata dalministerodelladifesaamericano). TeamTartan(Vincitore2007) TeamMexico(Presentazione) Iveicolinonpossonoesseretele operati,devono esserecapacidimuoversisoloservendosidei sensoriconiqualisonoequipaggiati. 18

19 Domini Applicativi Robot di Servizio Irobotdiserviziovengonoutilizzatipercompitidi tipodomesticoorelativiaspecificiambienti, oppurepossonoessereutilizzatiper l intrattenimento Ambitidiutilizzo: Robotguida/stazioneinformativamobile Robotpersorveglianzadiambienti Robotaspirapolvere Robottagliaerba Robotperl intrattenimento 19

20 Domini Applicativi Robot di Servizio Bumper Infrarossi Roomba Demo Pannello dicontrollo Motori 20

21 Domini Applicativi Umanoidi Unrobotumanoide(oandroide)ha,inparteo completamente,unastrutturasimileaquellaumana Ambitidiutilizzo: Ricerca Assistenzaperl uomo Intrattenimento Studiodell anatomiaumana 21
22 Domini Applicativi Umanoidi Asimoèilrobotumanoidepiùsofisticatochesiamai statocostruito. Ilprogettoèpartitonel1986edilprimoprototipo funzionanteèstatopresentatonel2000. SpotCommerciale Dimostrazione Running Asimoèdotatodicomponenticheglipermet tonodi muoversinell ambientecomenoiumani,solo nell ultimaversionedel2005èstatodotatodi intelligenzaartificiale. 22
23 Domini Applicativi Umanoidi SchedaTecnica Testa Altezza:130cm Braccia Peso:54kg Torso Velocità(camminata):2.7km/h Velocità(corsa):6Km/h Gambe Attuatori Sensori DoF:34 23
24 RIEPILOGO A.2 Elementi Strutturali Fondamentali 24
25 Riepilogo DefinizionieConcettiChiave DominiApplicativi (ambitidiutilizzo) Definizioni: Manipolatoriindustriali Robot RobotMobile Robotperlaricerca RobotMobileAutonomo Veicoliautonomi ConcettiChiave: Sensore Robotdiservizio Attuatore Controllo RobotUmanoidi 25
Corsi di Laurea in Ingegneria Informatica/Automazione Sbocchi occupazionali
 Corsi di Laurea in Ingegneria Informatica/Automazione Sbocchi occupazionali Al termine degli studi i laureati del Corso di Laurea in Ingegneria Informatica devono possedere conoscenze teoriche e competenze
Corsi di Laurea in Ingegneria Informatica/Automazione Sbocchi occupazionali Al termine degli studi i laureati del Corso di Laurea in Ingegneria Informatica devono possedere conoscenze teoriche e competenze
Corso di Studio in Ingegneria dell Automazione. Open Day 15 Febbraio 2014
 Corso di Studio in Ingegneria dell Automazione Open Day 15 Febbraio 2014 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Corso di Studio in Ingegneria dell Automazione Open Day 15 Febbraio 2014 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Fondamenti di Controlli Automatici Ing. Federica Grossi
 Fondamenti di Controlli Automatici Docente: Ing. Federica Grossi Tel: 059 2056333 e-mail: [email protected] url: http://www.dii.unimore.it/wiki/index.php/federica_grossi Ricevimento: Martedì dalle
Fondamenti di Controlli Automatici Docente: Ing. Federica Grossi Tel: 059 2056333 e-mail: [email protected] url: http://www.dii.unimore.it/wiki/index.php/federica_grossi Ricevimento: Martedì dalle
Università di Pisa Facoltà di Scienze Matematiche Fisiche e Naturali
 Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea Specialistica in Informatica (classe 23/S: Informatica) Corso di Laurea Specialistica in Tecnologie Informatiche (classe 23/S: Informatica)
Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea Specialistica in Informatica (classe 23/S: Informatica) Corso di Laurea Specialistica in Tecnologie Informatiche (classe 23/S: Informatica)
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Laurea in Ingegneria Meccanica e Meccatronica
 Università degli Studi di Padova Sede di Vicenza Laurea in Ingegneria Meccanica e Meccatronica Laurea in Ingegneria Meccanica e Meccatronica, Università di Padova - sede di Vicenza 1/15 La laurea in Ingegneria
Università degli Studi di Padova Sede di Vicenza Laurea in Ingegneria Meccanica e Meccatronica Laurea in Ingegneria Meccanica e Meccatronica, Università di Padova - sede di Vicenza 1/15 La laurea in Ingegneria
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali
 Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
PROBLEMI E SISTEMI DI CONTROLLO. Ruolo della modellistica matematica. Sistemi di controllo in anello chiuso. Controllo, supervisione e automazione
 PROBLEMI E SISTEMI DI CONTROLLO Problemi di controllo Sistemi di controllo Ruolo della modellistica matematica Sistemi di controllo in anello chiuso Controllo, supervisione e automazione Illustrazioni
PROBLEMI E SISTEMI DI CONTROLLO Problemi di controllo Sistemi di controllo Ruolo della modellistica matematica Sistemi di controllo in anello chiuso Controllo, supervisione e automazione Illustrazioni
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
Attenzione! il valore della Rimodulazione è superiore alla cifra di Negoziazione
 Riepilogo Dipartimento ICT Dipartimento ICT nel 2005 diretta nel terzi fondi diretta Reti in Tecnologia Wireless 434.890 79.788 712.457 94.953 578.280 351.500 94.000 Internet di prossima generazione 639.484
Riepilogo Dipartimento ICT Dipartimento ICT nel 2005 diretta nel terzi fondi diretta Reti in Tecnologia Wireless 434.890 79.788 712.457 94.953 578.280 351.500 94.000 Internet di prossima generazione 639.484
Università degli Studi di Perugia Valutazione della Didattica A.A.2008-2009 Facoltà di Ingegneria
 INGEGNERIA CIVILE (Classe 8) ANALISI MATEMATICA 8,0 52 FISICA GENERALE II 7,9 56 IDRAULICA 7,6 71 LEGISLAZIONE OO.PP. E LAVORI 7,6 28 IDROLOGIA E INFRASTRUTTURE IDRAULICHE 7,6 111 DISEGNO CIVILE 7,5 65
INGEGNERIA CIVILE (Classe 8) ANALISI MATEMATICA 8,0 52 FISICA GENERALE II 7,9 56 IDRAULICA 7,6 71 LEGISLAZIONE OO.PP. E LAVORI 7,6 28 IDROLOGIA E INFRASTRUTTURE IDRAULICHE 7,6 111 DISEGNO CIVILE 7,5 65
Fatti & Tendenze - Economia 3/2008 IL SETTORE DELLA ROBOTICA IN ITALIA NEL 2007
 Fatti & Tendenze - Economia 3/2008 IL SETTORE DELLA ROBOTICA IN ITALIA NEL 2007 luglio 2008 1 IL SETTORE DELLA ROBOTICA NEL 2007 1.1 L andamento del settore nel 2007 Il 2007 è stato un anno positivo per
Fatti & Tendenze - Economia 3/2008 IL SETTORE DELLA ROBOTICA IN ITALIA NEL 2007 luglio 2008 1 IL SETTORE DELLA ROBOTICA NEL 2007 1.1 L andamento del settore nel 2007 Il 2007 è stato un anno positivo per
ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016
 ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 H Disciplina: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI PROGETTAZIONE DIDATTICA ANNUALE Elaborata
ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 H Disciplina: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI PROGETTAZIONE DIDATTICA ANNUALE Elaborata
Corso di Studio in Ingegneria dell Automazione. Open Day 28 Marzo 2015
 Corso di Studio in Ingegneria dell Automazione Open Day 28 Marzo 2015 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Corso di Studio in Ingegneria dell Automazione Open Day 28 Marzo 2015 L Ingegneria dell Automazione E la scienza, la tecnica, la professione che si prefigge di progettare sistemi di controllo automatici,
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016
 ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI PROGETTAZIONE DIDATTICA ANNUALE Elaborata
ISTITUTO ISTRUZIONE SUPERIORE "L. EINAUDI" ALBA ANNO SCOLASTICO 2015/2016 CLASSE 5 I Disciplina: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI PROGETTAZIONE DIDATTICA ANNUALE Elaborata
PIANO DI STUDI. Laurea in Ingegneria industriale (DM 270/04) L-9. 1)CURRICULUM: Ingegneria elettrica e dei sistemi
 L-9. 1)CURRICULUM: Ingegneria elettrica e dei sistemi") 1)CURRICULUM: Ingegneria elettrica e dei sistemi Teoria dei circuiti 9 Metodi matematici per l ingegneria Totale crediti 0 Impianti elettrici 9 Macchine elettriche 9 Meccanica applicata alle macchine Economia
1)CURRICULUM: Ingegneria elettrica e dei sistemi Teoria dei circuiti 9 Metodi matematici per l ingegneria Totale crediti 0 Impianti elettrici 9 Macchine elettriche 9 Meccanica applicata alle macchine Economia
La Laurea Magistrale in Informatica 2014-15
 Università degli studi di Udine La Laurea Magistrale in Informatica 2014-15 Consiglio del Corso di Studi (CCS) in Materie Informatiche Aprile 2014 E-mail: [email protected] Il piano di studi
Università degli studi di Udine La Laurea Magistrale in Informatica 2014-15 Consiglio del Corso di Studi (CCS) in Materie Informatiche Aprile 2014 E-mail: [email protected] Il piano di studi
Controllo di Manipolatori (Calcolo delle Traiettorie 2)
") Controllo di Manipolatori (Calcolo delle Traiettorie 2) Ph.D Ing. Folgheraiter Michele Corso di Robotica Prof. Caglioti Anno Acc.. 2005/2006 Scelta della velocità nei punti di via con metodo Euristico:
Controllo di Manipolatori (Calcolo delle Traiettorie 2) Ph.D Ing. Folgheraiter Michele Corso di Robotica Prof. Caglioti Anno Acc.. 2005/2006 Scelta della velocità nei punti di via con metodo Euristico:
Prof. Alessandro Tasora. Meccanica dei robot. Esempi di robot industriali e controllori. Prof. Alessandro Tasora. Meccanica dei robot SCARA
 Esempi di robot industriali e controllori SCARA 1 SCARA STAUBLI 6 DOF antropomorfo ABB 2 6 DOF antropomorfo KUKA 6 DOF antropomorfo ADEPT 3 Meccanica dei Robot 6 DOF antropomorfo MOTOMAN 6 DOF antropomorfo
Esempi di robot industriali e controllori SCARA 1 SCARA STAUBLI 6 DOF antropomorfo ABB 2 6 DOF antropomorfo KUKA 6 DOF antropomorfo ADEPT 3 Meccanica dei Robot 6 DOF antropomorfo MOTOMAN 6 DOF antropomorfo
Disciplina: SISTEMI AUTOMATICI Classe: 4Aes
 Programmazione modulare Indirizzo: ELETTROTECNICA Prof. Iannetta Simone Prof. SAPORITO ETTORE (lab.) Disciplina: SISTEMI AUTOMATICI Classe: 4Aes Ore settimanali previste: 4 (2) Prerequisiti per l'accesso
Programmazione modulare Indirizzo: ELETTROTECNICA Prof. Iannetta Simone Prof. SAPORITO ETTORE (lab.) Disciplina: SISTEMI AUTOMATICI Classe: 4Aes Ore settimanali previste: 4 (2) Prerequisiti per l'accesso
Fondamenti di robotica
 Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani ([email protected]) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani ([email protected]) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
APPELLI D'ESAME SEDE DI MANTOVA
 Corso Acquedotti e fognature Analisi matematica Analisi matematica A (mn) Analisi matematica B (mn) Chimica Controlli automatici e controllo dei processi Disegno e metodi CAD per l'ingegneria Disegno e
Corso Acquedotti e fognature Analisi matematica Analisi matematica A (mn) Analisi matematica B (mn) Chimica Controlli automatici e controllo dei processi Disegno e metodi CAD per l'ingegneria Disegno e
ITIS A. MONACO COSENZA www.itimonaco.cs.it
 ITIS A. MONACO COSENZA www.itimonaco.cs.it SCUOLA RETE E.N.I.S. CERTIFICATA UNI EN ISO 9001 RETE MIUR ROBOT A SCUOLA INFORMATICA ELETTRONICA E TELECOMUNICAZIONI MECCANICA E TERMOTECNICA ELETTROTECNICA
ITIS A. MONACO COSENZA www.itimonaco.cs.it SCUOLA RETE E.N.I.S. CERTIFICATA UNI EN ISO 9001 RETE MIUR ROBOT A SCUOLA INFORMATICA ELETTRONICA E TELECOMUNICAZIONI MECCANICA E TERMOTECNICA ELETTROTECNICA
Corrispondenza tra gli insegnamenti: ORDINAMENTO (DM 509) NUOVO ORDINAMENTO (DM 270)
 NUOVO ORDINAMENTO (DM 270)") Corrispondenza tra gli insegnamenti: ORDINAMENTO (DM 509) NUOVO ORDINAMENTO (DM 270) Questo documento è indirizzato agli studenti che intendono optare per i corsi di laurea del nuovo ordinamento DM 270/04,
Corrispondenza tra gli insegnamenti: ORDINAMENTO (DM 509) NUOVO ORDINAMENTO (DM 270) Questo documento è indirizzato agli studenti che intendono optare per i corsi di laurea del nuovo ordinamento DM 270/04,
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ORIENTAMENTO ELETTRONICA. Progettazione di Sistemi Elettronici Elettronica per la Robotica Elettronica per l automazione industriale
 ORIENTAMENTO ELETTRONICA Progettazione di Sistemi Elettronici Elettronica per la Robotica Elettronica per l automazione industriale Progettazione di Sistemi Elettronici a.a. 20011-2012 Michele Corrà [email protected]
ORIENTAMENTO ELETTRONICA Progettazione di Sistemi Elettronici Elettronica per la Robotica Elettronica per l automazione industriale Progettazione di Sistemi Elettronici a.a. 20011-2012 Michele Corrà [email protected]
ANALISI E SIMULAZIONE DI SISTEMI DINAMICI. Lezione I: Introduzione ai sistemi dinamici
 ANALISI E SIMULAZIONE DI SISTEMI DINAMICI Lezione I: Introduzione ai sistemi dinamici Cosa è un sistema dinamico Un pò di storia Principio di causalità Concetto di stato Esempi di sistemi dinamici 1-1
ANALISI E SIMULAZIONE DI SISTEMI DINAMICI Lezione I: Introduzione ai sistemi dinamici Cosa è un sistema dinamico Un pò di storia Principio di causalità Concetto di stato Esempi di sistemi dinamici 1-1
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Laser 2dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Taglio laser a due gradi di libertà
La selezione dei brevetti più interessanti
 La selezione dei brevetti più interessanti # Titolo del brevetto Ambito applicativo 1 Dispositivo e procedimento di misurazione sonora e segnalazione 2 Sistema e metodo per misurare distanze, spostamenti
La selezione dei brevetti più interessanti # Titolo del brevetto Ambito applicativo 1 Dispositivo e procedimento di misurazione sonora e segnalazione 2 Sistema e metodo per misurare distanze, spostamenti
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Università di Bergamo Facoltà di Ingegneria. Intelligenza Artificiale. Paolo Salvaneschi A1_1 V1.1. Introduzione
 Università di Bergamo Facoltà di Ingegneria Intelligenza Artificiale Paolo Salvaneschi A1_1 V1.1 Introduzione Il contenuto del documento è liberamente utilizzabile dagli studenti, per studio personale
Università di Bergamo Facoltà di Ingegneria Intelligenza Artificiale Paolo Salvaneschi A1_1 V1.1 Introduzione Il contenuto del documento è liberamente utilizzabile dagli studenti, per studio personale
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco ([email protected]) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco ([email protected]) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
IL MONDO DELL INGEGNERIA
 !"" Classe delle lauree in Scienze dell Architettura e Ingegneria edile (4) Ingegneria edile Classe delle lauree in Ingegneria Civile e Ambientale (8) Ingegneria per la Sicurezza del Lavoro e dell'ambiente
!"" Classe delle lauree in Scienze dell Architettura e Ingegneria edile (4) Ingegneria edile Classe delle lauree in Ingegneria Civile e Ambientale (8) Ingegneria per la Sicurezza del Lavoro e dell'ambiente
Visione Computazionale
 Il docente Visione Computazionale Introduzione al corso a.a. 2004/2005 Andrea FUSIELLO, Professore Associato Dip. Informatica, Ca Vignal 2, I piano, stanza 5 Email: [email protected] Web Page del
Il docente Visione Computazionale Introduzione al corso a.a. 2004/2005 Andrea FUSIELLO, Professore Associato Dip. Informatica, Ca Vignal 2, I piano, stanza 5 Email: [email protected] Web Page del
Normativa (UNI EN ISO 8373)
") UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
Introduzione al corso
 Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Titolo unità didattiche in cui è diviso il Ore previste modulo
 PROGRAMMAZIONE MODULARE CLASSE IVAES INDIRIZZO:ELETTROTECNICA DISCIPLINA : SISTEMI ELETTRICI AUTOMATICI PROF. IANNETTA SIMONE PROF. SAPORITO ETTORE Ore settimanali previste: 4 Prerequisiti per l'accesso
PROGRAMMAZIONE MODULARE CLASSE IVAES INDIRIZZO:ELETTROTECNICA DISCIPLINA : SISTEMI ELETTRICI AUTOMATICI PROF. IANNETTA SIMONE PROF. SAPORITO ETTORE Ore settimanali previste: 4 Prerequisiti per l'accesso
CLASSE 5 A MM [Stesura a.s. 2014-15]
![CLASSE 5 A MM [Stesura a.s. 2014-15]](/thumbs/27/11381886.jpg "CLASSE 5 A MM [Stesura a.s. 2014-15]") PROGRAMMAZIONE COORDINATA TEMPORALMENTE Monte ore annuo 99 Libro di Testo SISTEMI ED AUTOMAZIONE INDUSTRIALE VOL.3 ANTONELLI ED. CAPPELLI SETTEMBRE Componentistica elettropneumatica. Schema elettrico funzionale.
PROGRAMMAZIONE COORDINATA TEMPORALMENTE Monte ore annuo 99 Libro di Testo SISTEMI ED AUTOMAZIONE INDUSTRIALE VOL.3 ANTONELLI ED. CAPPELLI SETTEMBRE Componentistica elettropneumatica. Schema elettrico funzionale.
1 Introduzione al corso 3 1.1 Architettura del sistema di controllo... 6
 Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
Indice 1 Introduzione al corso 3 1.1 Architettura del sistema di controllo................ 6 2 Elementi di modellistica 8 2.1 Modelli nel dominio del tempo................... 8 2.2 La trasformata di Laplace......................
Robotica Industiale. attività di laboratorio. Robotica Industriale Prof Claudio Melchiorri - 2009
 Robotica Industriale Prof Claudio Melchiorri - 2009 Robotica Industiale attività di laboratorio Robotica Industriale Prof Claudio Melchiorri - 2009 Contatti Mail: [email protected] Telefono: 051
Robotica Industriale Prof Claudio Melchiorri - 2009 Robotica Industiale attività di laboratorio Robotica Industriale Prof Claudio Melchiorri - 2009 Contatti Mail: [email protected] Telefono: 051
INGEGNERIA GESTIONALE (nuovo ordinamento) TORINO
 TORINO") INGEGNERIA GESTIONALE (nuovo ordinamento) TORINO Curriculum: Classe L-8 Attività di base (classe L-8) 45 4 SECS-S/02 Statistica per la ricerca sperimentale e Attività di base (classe L-9) SECS-S/02 Statistica
INGEGNERIA GESTIONALE (nuovo ordinamento) TORINO Curriculum: Classe L-8 Attività di base (classe L-8) 45 4 SECS-S/02 Statistica per la ricerca sperimentale e Attività di base (classe L-9) SECS-S/02 Statistica
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Scuola di Ingegneria Industriale e dell Informazione Corso di Studi in Ingegneria Informatica Allievi con cognome da E(incluso) a P(escluso)
 a P(escluso)") Introduzione al corso Fondamenti di Automatica Scuola di Ingegneria Industriale e dell Informazione Corso di Studi in Ingegneria Informatica Allievi con cognome da E(incluso) a P(escluso) Informazioni
Introduzione al corso Fondamenti di Automatica Scuola di Ingegneria Industriale e dell Informazione Corso di Studi in Ingegneria Informatica Allievi con cognome da E(incluso) a P(escluso) Informazioni
Liceo Tecnologico. Indirizzo Elettrico Elettronico. Indicazioni nazionali per Piani di Studi Personalizzati
 Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Introduzione alla Robotica
 1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata [email protected] Si ringrazia il Prof. Bruno Siciliano per aver fornito
1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata [email protected] Si ringrazia il Prof. Bruno Siciliano per aver fornito
Presentazione dell Orientamento
 Università di Roma La Sapienza Facoltà di Ingegneria Laurea Magistrale in Ingegneria Elettronica Presentazione dell Orientamento Robotica e Automazione 11 giugno 2009 Obiettivo formativo formare un ingegnere
Università di Roma La Sapienza Facoltà di Ingegneria Laurea Magistrale in Ingegneria Elettronica Presentazione dell Orientamento Robotica e Automazione 11 giugno 2009 Obiettivo formativo formare un ingegnere
CALENDARIO ESAMI A.A. 2014/2015- SESSIONE ESTIVA
 CALENDARIO ESAMI A.A. 2014/2015- SESSIONE ESTIVA TIPO LAUREA ORDINAMENTO ESAME DOCENTE GIORNO ORA AULA LII 509/99 Algebra Lineare e Geometria Leon Trujilo F. James 22-lug 14:30 N10, N11 LII 270/04-509/99
CALENDARIO ESAMI A.A. 2014/2015- SESSIONE ESTIVA TIPO LAUREA ORDINAMENTO ESAME DOCENTE GIORNO ORA AULA LII 509/99 Algebra Lineare e Geometria Leon Trujilo F. James 22-lug 14:30 N10, N11 LII 270/04-509/99
V E R B A L E N. 2 (PRESA VISIONE DEI DOCUMENTI INVIATI DAI CANDIDATI)
") Valutazione comparativa per la copertura di n. 1 posti di ricercatore universitario per il settore scientifico disciplinare ING-INF04 (Automatica) presso la Facoltà di Ingegneria dell Università degli
Valutazione comparativa per la copertura di n. 1 posti di ricercatore universitario per il settore scientifico disciplinare ING-INF04 (Automatica) presso la Facoltà di Ingegneria dell Università degli
Istituto tecnico economico
 PIANO DI LAVORO ANNUALE Istituto tecnico economico INSEGNANTE: CONSIGLIA MAZZONE MATERIA DI INSEGNAMENTO: MATEMATICA APPLICATA CLASSE V ITE ANNO SCOLASTICO 2014/2015 PARTE 1 LIVELLO COMPETENZE DISCIPLINARI
PIANO DI LAVORO ANNUALE Istituto tecnico economico INSEGNANTE: CONSIGLIA MAZZONE MATERIA DI INSEGNAMENTO: MATEMATICA APPLICATA CLASSE V ITE ANNO SCOLASTICO 2014/2015 PARTE 1 LIVELLO COMPETENZE DISCIPLINARI
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca [email protected] Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca [email protected] Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Corso di Fondamenti d Automatica
 Corso di Fondamenti d Automatica Prof. Giovanni Ulivi Ing. Stefano Panzieri Dipartimento di Informatica ed Automazione Via Vasca Navale 79, Roma e-mail: [email protected] e-mail: [email protected]
Corso di Fondamenti d Automatica Prof. Giovanni Ulivi Ing. Stefano Panzieri Dipartimento di Informatica ed Automazione Via Vasca Navale 79, Roma e-mail: [email protected] e-mail: [email protected]
MECCANICA DELLE MACCHINE
 UNIVERSITA POLITECNICA DELLE MARCHE Incontro U to A 4 Marzo 2011 MDM GRUPPO DI MECCANICA DELLE MACCHINE www.dipmec.univpm.it/meccanica MECCANICA APPLICATA ALLE MACCHINE PROGETTAZIONE MECCANICA FUNZIONALE
UNIVERSITA POLITECNICA DELLE MARCHE Incontro U to A 4 Marzo 2011 MDM GRUPPO DI MECCANICA DELLE MACCHINE www.dipmec.univpm.it/meccanica MECCANICA APPLICATA ALLE MACCHINE PROGETTAZIONE MECCANICA FUNZIONALE
TRACKING SYSTEM TO WELD Guida e controllo qualità dei processi relativi alle attività di saldatura
 CKG YM WD Guida e controllo qualità dei processi relativi alle attività di saldatura 1 BV G CC W biettivi idea progettuale prevede la definizione di strumenti e metodi per l assicurazione della qualità
CKG YM WD Guida e controllo qualità dei processi relativi alle attività di saldatura 1 BV G CC W biettivi idea progettuale prevede la definizione di strumenti e metodi per l assicurazione della qualità
Sistemi Operativi per la Robotica. Enzo Mumolo
 Sistemi Operativi per la Robotica Enzo Mumolo Sistemi Operativi per la Robotica www.units.it/~mumolo sito web del corso (in preparazione) Sito web programma preliminare, materiale, provetta, risultati
Sistemi Operativi per la Robotica Enzo Mumolo Sistemi Operativi per la Robotica www.units.it/~mumolo sito web del corso (in preparazione) Sito web programma preliminare, materiale, provetta, risultati
Indice INTRODUZIONE Cos è l autronica...iii
 Indice INTRODUZIONE Cos è l autronica...iii CAP.1 Elementi fondamentali dei sistemi di calcolo programmabili...1 1.1 - GENERALITÀ...1 1.2 - SEGNALI ELETTRICI...2 1.3 - COSTITUZIONE E FUNZIONAMENTO DEI
Indice INTRODUZIONE Cos è l autronica...iii CAP.1 Elementi fondamentali dei sistemi di calcolo programmabili...1 1.1 - GENERALITÀ...1 1.2 - SEGNALI ELETTRICI...2 1.3 - COSTITUZIONE E FUNZIONAMENTO DEI
Componenti per la robotica: Generalità e Attuatori
 Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
AUTOMOTIVE. Nel processo produttivo di componenti dell'industria automobilistica deve essere garantita la
 Per quanto concerne l'industria automobilistica, l'approccio è orientato all'ottenimento di prestazioni di prim'ordine con la fornitura di una tecnologia in grado di ridurre al minimo i margini di errore
Per quanto concerne l'industria automobilistica, l'approccio è orientato all'ottenimento di prestazioni di prim'ordine con la fornitura di una tecnologia in grado di ridurre al minimo i margini di errore
INTRODUZIONE AL CONTROLLO OTTIMO
 INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
INTRODUZIONE AL CONTROLLO OTTIMO Teoria dei Sistemi Ingegneria Elettronica, Informatica e TLC Prof. Roberto Zanasi, Dott. Giovanni Azzone DII - Università di Modena e Reggio Emilia AUTOLAB: Laboratorio
UNIVERSITÀ MEDITERRANEA DI REGGIO CALABRIA Dipartimento di Ingegneria Civile, dell'energia, dell'ambiente e dei Materiali (DICEAM)
") ORARIO CORSI A.A. 15/16 I SEMESTRE DAL 5 OTTOBRE AL 18 DICEMBRE 2015 ---- CORSO DI LAUREA IN INGEGNERIA CIVILE AMBIENTALE I ANNO Fisica Analisi matematica I Analisi matematica I Fisica Analisi matematica
ORARIO CORSI A.A. 15/16 I SEMESTRE DAL 5 OTTOBRE AL 18 DICEMBRE 2015 ---- CORSO DI LAUREA IN INGEGNERIA CIVILE AMBIENTALE I ANNO Fisica Analisi matematica I Analisi matematica I Fisica Analisi matematica
ALLEGATO 1b - "REQUISITI SPECIFICI DI AMMISSIBILITA' DELLE DOMANDE CORSO COD. 189764 PERIODO TITOLI SEDE. Ciof Jesi. aprile 2015 - giugno 2016
 All. n.1b ALLEGATO 1b "REQUISITI SPECIFICI DI AMMISSIBILITA' DELLE DOMANDE CORSO COD. N. Progressivo incarico RUOLO MATERIA CORSO CODICE ORE SEDE PERIODO TITOLI REQUISITI NOTE ANNI ESPER. DIDATTICA ANNI
All. n.1b ALLEGATO 1b "REQUISITI SPECIFICI DI AMMISSIBILITA' DELLE DOMANDE CORSO COD. N. Progressivo incarico RUOLO MATERIA CORSO CODICE ORE SEDE PERIODO TITOLI REQUISITI NOTE ANNI ESPER. DIDATTICA ANNI
Visione Artificiale nell Automotive
 Visione Artificiale nell Automotive Una presenza diffusa Introduzione Nell ultimo decennio, la necessità di controlli automatici sempre più accurati ha portato ad un intensa integrazione dell industria
Visione Artificiale nell Automotive Una presenza diffusa Introduzione Nell ultimo decennio, la necessità di controlli automatici sempre più accurati ha portato ad un intensa integrazione dell industria
Sistemi di prelievo oggetti alla rinfusa
 Sistemi di prelievo oggetti alla rinfusa + 1 Finalmente qualcosa di veramente nuovo. Già pronto. Abbiamo due sistemi già pronti, il sistema LV a scansione laser ed il sistema KV che sfrutta il noto proiettore
Sistemi di prelievo oggetti alla rinfusa + 1 Finalmente qualcosa di veramente nuovo. Già pronto. Abbiamo due sistemi già pronti, il sistema LV a scansione laser ed il sistema KV che sfrutta il noto proiettore
FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: [email protected]
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: [email protected]
SISTEMI DI CONTROLLO INTRODUZIONE
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html SISTEMI DI CONTROLLO INTRODUZIONE Ing. e-mail: [email protected]
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html SISTEMI DI CONTROLLO INTRODUZIONE Ing. e-mail: [email protected]
Robotica industriale. Introduzione al corso. Prof. Paolo Rocco ([email protected])
") Robotica industriale Introduzione al corso Prof. Paolo Rocco ([email protected]) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Robotica industriale Introduzione al corso Prof. Paolo Rocco ([email protected]) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
 Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Uomo. Materiale didattico: http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html Corso di Sistemi di controllo Materiale
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html Corso di Sistemi di controllo Materiale
ISTITUTO TECNICO INDUSTRIALE Leonardo da Vinci con sez. Commerciale annessa BORGOMANERO (NO) PIANO DI LAVORO. Anno Scolastico 2015 2016
 PIANO DI LAVORO. Anno Scolastico 2015 2016") ISTITUTO TECNICO INDUSTRIALE Leonardo da Vinci con sez. Commerciale annessa BORGOMANERO (NO) PIANO DI LAVORO Anno Scolastico 2015 2016 Materia: Sistemi ed Automazione Industriale Classe: 5 a Meccanici
ISTITUTO TECNICO INDUSTRIALE Leonardo da Vinci con sez. Commerciale annessa BORGOMANERO (NO) PIANO DI LAVORO Anno Scolastico 2015 2016 Materia: Sistemi ed Automazione Industriale Classe: 5 a Meccanici
Progettazione e realizzazione di un manipolatore elettromeccanico
 Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
Progettazione e realizzazione di un manipolatore elettromeccanico Hermes Giberti Politecnico di Milano u robotica u La progettazione di un sistema automatico richiede una collaborazione sinergica tra le
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
SEZIONE OTTAVA FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI ART. 1
 SEZIONE OTTAVA FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI ART. 1 Alla Facoltà di Scienze matematiche, fisiche e naturali afferiscono i seguenti corsi di laurea: a) corso di laurea quadriennale
SEZIONE OTTAVA FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI ART. 1 Alla Facoltà di Scienze matematiche, fisiche e naturali afferiscono i seguenti corsi di laurea: a) corso di laurea quadriennale
CURVATURA VERSO ROBOTICA/MECCATRONICA AVANZATA INDIRIZZO INFORMATICA E TELECOMUNICAZIONI
 CURVATURA VERSO ROBOTICA/MECCATRONICA AVANZATA INDIRIZZO INFORMATICA E TELECOMUNICAZIONI MACRO-COMPETENZE IN USCITA VERSO LA ROBOTICA/MECCATRONICA AVANZATA Quattro Macro-Competenze Specialistiche: 1. Saper
CURVATURA VERSO ROBOTICA/MECCATRONICA AVANZATA INDIRIZZO INFORMATICA E TELECOMUNICAZIONI MACRO-COMPETENZE IN USCITA VERSO LA ROBOTICA/MECCATRONICA AVANZATA Quattro Macro-Competenze Specialistiche: 1. Saper
INDIRIZZO: AREA SCIENZE NATURALI
 INDIRIZZO: AREA SCIENZE NATURALI Classe di abilitazione: 13A Chimica e tecnologie chimiche - STORIA ED EPISTEMOLOGIA DELLA CHIMICA I - STORIA ED EPISTEMOLOGIA DELLA CHIMICA II - DIDATTICA DELLA CHIMICA
INDIRIZZO: AREA SCIENZE NATURALI Classe di abilitazione: 13A Chimica e tecnologie chimiche - STORIA ED EPISTEMOLOGIA DELLA CHIMICA I - STORIA ED EPISTEMOLOGIA DELLA CHIMICA II - DIDATTICA DELLA CHIMICA
"Insegnamenti a scelta" suggeriti per il Corso di Laurea in Ingegneria Elettronica (ex DM 270/04)
") "Insegnamenti a scelta" suggeriti per il Corso di Laurea in Ingegneria Elettronica (ex DM 270/04) Settore dell'informazione Campi elettromagnetici ING- INF/02 9 1 1 LM Ingegneria Elettronica Dispositivi
"Insegnamenti a scelta" suggeriti per il Corso di Laurea in Ingegneria Elettronica (ex DM 270/04) Settore dell'informazione Campi elettromagnetici ING- INF/02 9 1 1 LM Ingegneria Elettronica Dispositivi
I tecnici di Automazione nel mondo del lavoro
 I tecnici di Automazione nel mondo del lavoro Indagine sulla collocazione del tecnico/ingegnere di automazione nel mondo del lavoro pag. 1 Motivazioni Un osservatorio per l analisi dei bisogni di cultura
I tecnici di Automazione nel mondo del lavoro Indagine sulla collocazione del tecnico/ingegnere di automazione nel mondo del lavoro pag. 1 Motivazioni Un osservatorio per l analisi dei bisogni di cultura
F. Blanchini # D. Casagrande * P. Gardonio * S. Miani
 AUTOMATICA.IT Convegno Annuale dei Docenti e Ricercaori Italiani in Automatica Pisa, 7-9 settembre 2011 CONSTANT AND SWITCHING GAINS IN SEMI ACTIVE DAMPING OF VIBRATING STRUCTURES F. Blanchini # D. Casagrande
AUTOMATICA.IT Convegno Annuale dei Docenti e Ricercaori Italiani in Automatica Pisa, 7-9 settembre 2011 CONSTANT AND SWITCHING GAINS IN SEMI ACTIVE DAMPING OF VIBRATING STRUCTURES F. Blanchini # D. Casagrande
A PRESENTAZIONE. Fogli elettronici con le operazioni aritmetiche e alcune funzioni più semplici anche con grafici
 UNITÀ DI APPRENDIMENTO TECNOLOGIE DELL INFORMAZIONE E DELLA COMUNICAZIONE Ref. Prof.ri TIC e Informatica e Laboratorio A.S. 2015-2016 TITOLO : Calcoliamo con il computer COD. U.d.A N 4/4 A PRESENTAZIONE
UNITÀ DI APPRENDIMENTO TECNOLOGIE DELL INFORMAZIONE E DELLA COMUNICAZIONE Ref. Prof.ri TIC e Informatica e Laboratorio A.S. 2015-2016 TITOLO : Calcoliamo con il computer COD. U.d.A N 4/4 A PRESENTAZIONE
ELETTROTECNICA E MACCHINE ELETTRICHE
 CORSO DI ELETTROTECNICA E MACCHINE Circuiti in corrente continua e alternata - Misure elettriche e laboratorio - Aspetti costruttivi, funzionamento e caratteristiche delle macchine elettriche 2005, pp.
CORSO DI ELETTROTECNICA E MACCHINE Circuiti in corrente continua e alternata - Misure elettriche e laboratorio - Aspetti costruttivi, funzionamento e caratteristiche delle macchine elettriche 2005, pp.