Manipolazione meccatronica. Sistemi di presa Selezione e Dimensionamento. Docente: Prof. Enrico Ravina
|
|
|
- Annibale Russo
- 5 anni fa
- Visualizzazioni
Transcript
1 Manipolazione meccatronica Sistemi di presa Selezione e Dimensionamento Docente: Prof. Enrico Ravina
2 Generalità sui Sistemi di Presa per Automazione Principali funzioni: Assicurare temporaneamente una definita posizione e orientamento dell'oggetto relativamente a un sistema di riferimento Mantenere in condizioni statiche o dinamiche determinate forze e momenti Permettere la variazione di posizione e orientamento dell'oggetto in relazione a un sistema di riferimento Consentire operazioni tecniche specifiche richieste dalla particolare applicazione
3 Campi applicativi Robotica industriale (presa e manipolazione di oggetti) Catene di assemblaggio, montaggio o imballaggio Macchine a controllo numerico (impiego di utensili) Manipolatori controllati da remoto (campo medico, aerospaziale, nautico) Sistemi di carico e scarico di oggetti Robotica di servizio (gripper antropomorfi)

4 Componenti di un end-effector
5 Front End: Dispositivi di presa e rotazione Insieme di componenti a valle dell ultimo asse della catena cinematica


6 Front End: Dispositivi di presa e rotazione Obiettivo: rotazione e presa dell oggetto della manipolazione
7 Front End: Dispositivi di presa e rotazione Note per la progettazione 1. Dispositivo di presa (dita + attuatore) 2. Rotativo 3. Assi della catena cinematica La scelta del FrontEnd influenza la selezione dei componenti a monte a causa della sua massa totale e delle forze dinamiche generate
8 Front End: Dispositivi di presa e rotazione Dispositivi di presa Dispositivi Meccanici Componenti Standard Non standard Attuazione elettrica Attuazione Pneumatica Sistemi


9 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti Sistemi




10 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti Standard Parallele A 3 Griffe Radiali Angolari

11 Suddivisione temporale della fase di presa

12 Tipologie di gripper Impactive: una forza meccanica e direttamente impressa sull'oggetto da due o più direzioni Ingressive: la presa avviene tramite l'inserimento dell'organo di presa nell'oggetto, attraverso una o più superfici Astrictive: una forza o un campo attrattivo vincola l'oggetto consentendone la presa Congiuntive: il sostegno dell'oggetto avviene attraverso una forza unidirezionale sviluppata dopo il contatto diretto non impattivo
13 Tipologie di end effector Organi di presa (gripper) meccanici a depressione a espansione magnetici altri Utensili (tool)

14 Sistemi di presa - Famiglie principali Pinze pneumatiche Ventose

15 Front End: Dispositivi di presa e rotazione Dispositivi di presa Dispositivi Meccanici Tecnica del vuoto
16 Scelta dell organo di presa Conoscenza delle proprietà dell'oggetto Conoscenza delle condizioni di lavoro Scelta di una tipologia di presa e disegno delle dita di presa Stima delle forza di presa necessaria e dei valori di carico massimi per quell'oggetto Verifica requisiti di protezione, sicurezza, connessioni e controlli Scelta del tipo di gripper Scelta degli accessori Controllo che le scelte soddisfino tutti i requisiti, anche economici

17 Compatibilità A = adatto N = non adatto C = adatto sotto certe condizioni

18

19 Caratteristiche dell oggetto e ambientali

20 Caratteristiche dell oggetto e ambientali

21 Punti di contatto fra oggetto e dita di presa
22 Sensoristica e Controllo Rilevamento della presenza dell oggetto da manipolare Verifica della presa e/o rilascio Controllo della posizione e dell'orientamento dell'oggetto Sensori di prossimità Sensori tattili Sensori di forza/coppia Sensori di posizione/velocità

23 Sistemi di presa - Analisi dell oggetto Per selezionare la miglior tipologia di sistema di presa è necessario partire dall analisi dell oggetto da manipolare Le varietà di oggetti che può essere necessario manipolare è virtualmente infinita ed ogni oggetto ha le proprie caratteristiche e criticità

24 Per l elevato numero di variabili è di fatto impossibile classificare con esattezza ogni tipo di oggetto E peraltro possibile raggruppare gli oggetti da manipolare in quattro categorie principali Materiali grezzi e componenti meccanici Componenti elettronici e componenti ottici Fogli di metallo e profilati Oggetti di uso comune
25 I materiali grezzi e i componenti di montaggio hanno forme regolari e sono mediamente semplici da afferrare. I componenti elettronici hanno forme complesse e tendono a essere piuttosto fragili e soggetti a graffiatura. I fogli metallici e i profilati hanno spesso dimensioni particolarmente elevate. Gli oggetti di uso comune sono spesso deformabili.
26 A seconda della categoria di oggetto da afferrare è più o meno semplice utilizzare la tecnologia di presa meccanica piuttosto che pneumatica

27 Caratteristiche dell oggetto da esaminare durante il processo di selezione del sistema di presa
28 Prima di iniziare la selezione del sistema di presa è necessario rilevare le specifiche dell applicazione e le condizioni ambientali


29 Selezione preliminare (Primo livello di selezione) Selezione della famiglia di sistema di presa

30 Proprietà degli azionamenti
31 Gripper meccanico Braccio del robot Polso Corpo del gripper Dito Pezzo da afferrare
32 Vantaggi e svantaggi della presa con gripper meccanico elevata stabilità elevata precisione necessità di almeno due superfici contrapposte tempi relativamente elevati (avvicinamento compreso) ingombri e pesi elevati
33 Caratteristiche di un gripper meccanico Modalità di apertura/chiusura dita Gripper articolato Gripper parallelo Meccanismo di movimentazione dita Peso e ingombro Corsa Forza di apertura e chiusura Reversibilità del moto Tipo di polpastrello Numero di dita
34 Meccanismo articolato di movimentazione delle dita
35 Meccanismo di movimentazione dita con rotismi
36 Meccanismo di movimentazione dita con camme
37 Meccanismo di movimentazione dita con vite
38 Pinze pneumatiche Tipologie

39 Pinze pneumatiche Considerazioni generali La parte della pinza che viene direttamente a contatto con l oggetto è denominata dito di presa. Le dita di presa vengono montati sulle griffe della pinza e sono intercambiabili. I profili delle dita sono generalmente disegnati su misura per adattarsi con precisione all oggetto manipolato. Dito Griffa
40 Pinze pneumatiche Considerazioni generali Durante la progettazione delle dita di presa è opportuno adottare specifici accorgimenti Afferrare sempre l oggetto su superfici parallele Ridurre al minimo la corsa di afferraggio Dove possibile afferrare l oggetto concordemente alla direzione del moto Afferrare l oggetto il più vicino possibile al suo centro di massa
 ma che sfruttino la geometria del contatto (accoppiamento di")
41 E sempre preferibile utilizzare dita di presa che non sostengano il pezzo solo per attrito (accoppiamento di forza) ma che sfruttino la geometria del contatto (accoppiamento di forma).
42 Pinze pneumatiche Principali tipologie di pinze Pinze parallele con dita non sagomate movimentazione di oggetti con forma molto regolare movimentazione di oggetti con masse molto contenute o con dinamiche molto basse afferraggio su appoggi limitanti o in zone di lavoro ristrette

43 Pinze parallele con dita sagomate movimentazione di oggetti con facce non piane movimentazione di oggetti con masse e dinamiche medio-alte
44 Pinze a tre griffe con dita non sagomate movimentazione di oggetti a geometria cilindrica che offrano pochi punti di presa per utensili sagomati

45 Pinze a tre griffe con dita sagomate movimentazione di oggetti con forma sferica/cilindrica movimentazione con dinamiche molto alte e su più direzioni movimentazione a basse dinamiche in cui si voglia «ingabbiare» l oggetto anziché stringerlo
46 Pinze a corsa lunga movimentazione di oggetti non particolarmente pesanti ma molto voluminosi che richiederebbero utensili di presa molto lunghi movimentazione di oggetti con dimensioni molto diverse da effettuare con la stessa pinza movimentazione di oggetti da afferrare con accoppiamento geometrico molto avvolgente


47 Pinze radiali/angolari Vengono utilizzate in applicazioni dove la posizione di presa abbia una certa variabilità, in quanto hanno proprietà autocentranti. Hanno generalmente costi più bassi delle pinze parallele ma hanno anche prestazioni più basse e precisione inferiore. Le pinze angolari aprono le dita solo di pochi gradi e sono regolabili mentre quelle radiali operano generalmente tra 0 e 90
48 Pinze radiali/angolari E importante ricordare che per l impiego di pinze radiali è necessario prevedere un campo di manovra più ampio rispetto a quello necessario per le pinze parallele.



49 Altre tipologie di pinza Pinze per carichi elevati Pinze per ambienti aggressivi Sono pinze con guide particolarmente robuste solitamente con sezione a T. Vengono utilizzate per dinamiche elevate, oggetti con masse elevate e dita di presa di grosse dimensioni Presentano guarnizioni sulle guide delle dita. Vengono usate per ambienti in cui ci sia presenza di liquidi e/o di sostanze aggressive
50 Pinze pneumatiche Secondo livello di selezione Non sempre l applicazione è tale da permettere di definire un sistema di presa preferenziale. Spesso si può adottare più d una strategia di presa. Buona parte del processo di selezione dipende dall esperienza del progettista.
51 Pinze pneumatiche Secondo livello di selezione Panoramica complessiva
52 Quanto deve valere Fg? Pinze pneumatiche Calcolo della forza di presa necessaria F g F g Generalmente sui dati di catalogo viene riportata la forza per ogni griffa F g. In ogni caso la forza esercitata da ogni griffa potrebbe essere maggiore e minore di quella riportata a catalogo. L unica limitazione risiede nella somma delle forze che le dita applicano all oggetto che è costante in quanto deriva dalla forza dall attuatore pneumatico interno alla pinza.
53 Pinze pneumatiche Calcolo della forza di presa necessaria Dita non sagomate verticali moto verticale 2F r m(g a) S F μf r g F r a F r F g m(g a) S 2μ µ Fattore d attrito F g F g S Coefficiente di sicurezza Fattori d attrito (valori orientativi) mg Superfici lisce leggermente oleate: 0,1 Metallo su metallo: da 0,15 a 0,2 Dita di presa dentellate: da 0,3 a 0,4 Metallo su gomma: da 0,5 a 0,7 Coefficiente di sicurezza: usualmente compreso fra 2 e 4
54 Dita verticali non sagomate moto orizzontale Forza del pistone F g1 F g2 2F g F g2 2F F g g1 Equilibrio orizzontale F g1 F g2 ma 0 F g1 maf g2 F g1 1 ma mg F g2 Sostituendo F ma 2F F F g1 g2 F g g1 ma 2Fg Fg 2 Limite di forza g1 2F g Equilibrio verticale mg F g1 F g2 2F F g2 g1 ma Fg 2Fg 2 μ ma 2F ma Fg 2 mg 2F μ g F g g ma 2 F g F g1 mg 2μ ma Fg 2
55 Dita non sagomate verticali moto orizzontale ma F g1 ma F 2 g F g2 ma F 2 g F g1 F g2 F g ma S 2 e F g mg S 2 μ mg
56 Dita non sagomate verticali ciclo di lavoro Durante un ciclo di lavoro la direzione assunta dalle forze d inerzia può variare. E necessario dimensionare le pinze usando la forza da erogare nel caso più oneroso. Attenzione alle fermate d emergenza.
57 Dita non sagomate orizzontali moto verticale a F g1 mg La forza di presa necessaria in questa configurazione risulta sempre più bassa che nella configurazione a dita verticali. In questo caso, però, una delle dita compie quasi tutto il lavoro meccanico. Ciò può causare un usura prematura della pinza. E inoltre necessario considerare le accelerazioni nelle fasi successive di moto (moto orizzontale). m g a F g S F 2 g2
58 Dita sagomate verticali moto verticale 2F K cos mg as F K FG sen
59 Dita sagomate verticali moto verticale F K2 cos mg as F K2 F G FG sen m g atan F K1 F G
60 Dita sagomate Pinze radiali/angolari a) radiali b) parallele Nel caso di pinze radiali/angolari con dita di presa sagomate è necessario tenere conto che, se si afferrano oggetti con dimensioni diverse, cambiano gli angoli di contatto tra utensile e oggetto.
61 Dita sagomate orizzontali moto verticale 4F K mg as F K FG 2sin
62 Dita sagomate orizzontali moto verticale Presa a tre dita

63 Studio di caso Cilindro con massa m = 5 kg sottoposto ad un'accelerazione a = 6 m/s 2 e dita di presa con α= 90, fattore d attrito = 0.1 e coefficiente di sicurezza S = 2.
64 Pinze pneumatiche Lunghezza delle dita La forza di presa che una pinza pneumatica può erogare diminuisce all aumentare della lunghezza delle dita. Forza reale di presa La forza erogabile dalle pinze parallele varia in funzione della lunghezza delle dita. La forza di afferraggio della pinza sul pezzo genera un momento flettente sulle guide. Ciò aumenta l attrito il quale si oppone alla forza di afferraggio stessa.
65 Pinze pneumatiche Direzione di approccio. Lunghezza delle dita Nel caso si decida di approcciare il pezzo lateralmente, anziché verticalmente, con degli utensili di presa sagomati, occorre considerare anche una corsa maggiore delle dita in modo da non interferire con la geometria del pezzo.
66 F G Reale La forza di presa che una pinza pneumatica può erogare diminuisce all aumentare della lunghezza delle dita. F G M Gr Le pinze radiali ed angolari generano una coppia costante (a parità di angolo), quindi la forza trasmissibile cala a causa del braccio di leva. Inoltre è necessario considerare l effetto degli attriti.

67 La forza di presa che una pinza pneumatica può erogare diminuisce all aumentare della lunghezza delle dita. F G M Gr F G Per le pinze radiali è anche necessario considerare che la coppia erogata è funzione dell angolo di inclinazione delle dita.

68 Pinze pneumatiche Comportamento in emergenza Il funzionamento tipico delle macchine industriali prevede il taglio dell alimentazione dell aria compressa in caso di emergenza. Nella maggior parte dei casi, con una pinza pneumatica, ciò comporta la perdita del pezzo in presa. Nel caso tale eventualità non fosse accettabile è necessario utilizzare un circuito pneumatico di sicurezza oppure delle pinze che dotate di molle interne di ritenuta. In questo modo è possibile mantenere il pezzo in presa anche in assenza di aria. La forza della molla va a sommarsi a quella dell aria compressa in fase di chiusura e si sottrae in apertura.
69 Pinze pneumatiche Calcolo della forza di presa tramite molla F g F g mg 2μ F r F r F g La forza di ritenuta erogabile dalla molla deve essere calcolata con formule analoghe a quelle già analizzate. Dato che il funzionamento previsto per la molla si riferisce alla macchina ferma, nelle formule non devono essere considerate le accelerazioni ma solo il peso dell oggetto. Anche in questo caso valgono le considerazioni sulla lunghezza degli utensili già viste in precedenza. mg NOTA BENE: lo scarico del circuito pneumatico deve avvenire a macchina ferma

70 Calcolo della forza di presa tramite molla La forza di ritenuta della molla è funzione della corsa delle dita. Più le griffe sono distanti, più la molla è compressa e maggiore sarà la forza elastica restituita La forza complessiva disponibile viene calcolata tenendo conto anche della lunghezza delle dita sulla base di formile empiriche specifiche per ogni modello di pinza. F F F g erogabile
71 Pinze pneumatiche Resistenza delle guide Verifiche finali Una volta stabilito quali sono le forze in gioco sulle griffe è necessario verificare che le guide delle griffe siano in grado di sopportare i carichi richiesti. In questo caso è necessario considerare anche la massa delle dita e le forze che F z agiscono su di essi. F g mg M x ma Durante le varie fasi del ciclo di lavoro le accelerazioni possono cambiare direzione e sollecitare le guide in direzioni diverse. Anche in questo caso è possibile effettuare la verifica sulla condizione di lavoro più onerosa.
72 Peso del dito Pinze pneumatiche Verifiche finali I limiti di forza e momento specificati per le guide sono tutti valori statici ossia applicabili quando le dita della pinza sono ferme. I limiti dinamici di resistenza, però, sono sempre più bassi. Durante il movimento della griffa l unico carico è rappresentato dal peso del dito di presa. E necessario verificare che il peso del dito non superi il peso massimo specificato sulla scheda tecnica della pinza. F z mg

73 Pinze pneumatiche Tempo di chiusura Verifiche finali Inoltre è importante verificare che il tempo di chiusura della pinza sia conforme a quanto ipotizzato in fase di definizione del ciclo. Il tempo di chiusura delle griffe viene fornito in funzione del peso del dito nel caso di pinza parallela, ed in funzione del momento di inerzia dello stesso in caso di pinza radiale. F z t [ms] mg
74 Pinze pneumatiche Esempi di utensili di presa

75 Pinze pneumatiche Esempi di utensili di presa
76 Pinze pneumatiche Esempi di sistema di presa complessi
77 Pinze pneumatiche Esempi di sistema di presa complessi
78 Pinze pneumatiche Esempi di sistema di presa complessi


79 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti Standard Parallele A 3 Griffe Radiali Angolari Guida a ricircolo di sfere

80 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti Standard Parallele A 3 Griffe Radiali Angolari Guida a strisciamento


81 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti Standard Parallele A 3 Griffe Radiali Angolari


82 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti Standard Parallele A 3 Griffe Radiali Angolari Camma meccanica limitata solo a 180 Camma meccanica limitata ad angoli variabili
83 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti non standard Pinze a soffietto Altri dispositivi




84 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti non standard Pinze a soffietto Altri dispositivi


85 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Componenti non standard Pinze a soffietto Altri dispositivi Asse lineare + Carrello = Pinza
86 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Attuazione Pneumatica Attuazione Elettrica
87 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Attuazione Pneumatica Attuazione Elettrica
88 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Attuazione Pneumatica Attuazione Elettrica
89 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Attuazione Pneumatica Attuazione Elettrica
90 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Attuazione Pneumatica Attuazione Elettrica Multiposizione

91 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Attuazione Pneumatica Controllo di velocità Attuazione Elettrica Controllo di forza

92 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Sistemi
93 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Sistemi

94 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Sistemi

95 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Meccanici Sistemi
96 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Elementi di presa Pinze = Attuatori Forza Tempo di presa Tipologia di movimento Carico strutturale Carico dinamico Dita = Elementi di presa Coeff. di attrito Geometria di presa Ingombri Effetti diretti sul pezzo
97 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Elementi di presa Pinze = Attuatori Dimensionamento - Produttore componenti Dita = Elementi di presa Test empirici - OEM

98 Front End: Dispositivi di presa e rotazione Dispositivi di presa: Elementi di presa Pinze = Attuatori Dimensionamento - Produttore componenti Dita = Elementi di presa Test empirici -
99 Gripper a depressione Polso del robot Corpo del gripper Flusso di aria Superficie del pezzo da afferrare Ventosa



100 Pompa ad eiettore
101 Vantaggi e svantaggi della presa con un gripper a depressione adatto a materiali fragili e delicati rapidità e facilità di presa bassa precisione necessità di superfici lisce, prive di fori e non porose
102 Gripper a depressione

103 Gripper multiplo a depressione
104 Gripper a espansione Polso del robot Corpo del gripper Pezzo da afferrare Elemento espandibile
105 Vantaggi e svantaggi della presa con un gripper ad espansione elevata precisione elevata stabilità necessità di presenza di fori limitata flessibilità

106 Gripper a colletto
107 Gripper magnetico Polso del robot Corpo del gripper Pezzo da afferrare Magnete o elettromagnete
108 Vantaggi e svantaggi della presa con un gripper magnetico rapidità e facilità di presa presa anche su superfici forate afferraggio solo su materiali ferromagnetici presa di oggetti indesiderati

109 Gripper meccanico-depressione presa di oggetti delicati


110 Gripper ad aghi presa di tessuti
111 Sistemi impiegati per aumentare la flessibilità dei gripper Sistemi di cambio gripper Torrette portagripper

112 Sistema di cambio gripper Interfaccia solidale al robot Braccio del robot Magazzino gripper Interfaccia solidale al gripper Gripper

113 Applicazione sistema di cambio gripper

114 Torretta portagripper
115 Torretta portagripper

116 Utensile per saldatura all arco elettrico

117 Utensile per saldatura all arco elettrico
118 Utensile per saldatura all arco elettrico

119 Utensile per saldatura all arco elettrico
120 Utensile per saldatura all arco elettrico
121 Generalità Ventose
122 Ventose Considerazioni generali La tecnologia di presa tramite vuoto è largamente diffusa, a livello industriale, data la sua semplicità di implementazione. Si adatta a svariate applicazioni, sempre a condizione che le superfici di afferraggio siano abbastanza lisce e poco porose.

123 Ventose Considerazioni generali In particolare l uso delle ventose è particolarmente indicato per materiali con ben determinate caratteristiche. Suscettibili alla deformazione Superfici suscettibili alla graffiatura Non magnetizzabili Superfici lievemente corrugate non porose Dimensioni e proporzioni inusuali
124 Ventose Considerazioni generali Anche nel caso delle ventose ci sono degli accorgimenti che è bene adottare durante la progettazione del sistema Afferrare sempre l oggetto su superfici piane Posizionare le ventose in direzione congruente con il moto Disporre le ventose simmetricamente rispetto al centro di massa Scegliere una posizioni in cui la/le ventosa/e non siano soggette a torsione





125 Ventose Principali tipologie di ventose Standard A soffietto Ovale sup. piane o leggermente ondulate/curve sup. smussate, curve, ampie o pieghevoli sup. rettangolari o snelle, come profilati o tubi Extra profonda sup. sferiche o a cupola sup. delicate, come vetro o lampadine compensatore di altezza a costo zero
126 Ventose Calcolo della forza di aspirazione disponibile S F s P 0 P u A n 3 η Forza di aspirazione prodotta dalla ventosa Pressione atmosferica Pressione all interno della ventosa Area interna della ventosa Coefficiente di deformazione. Ventose molto morbide possono deformarsi notevolmente all aumentare della depressione riducendo l area effettiva. n 3 = Efficienza complessiva del sistema, trafilamenti inclusi
127 Ventose Calcolo della forza di aspirazione disponibile S N.B. Spesso il livello di vuoto viene indicato direttamente come differenza tra la pressione nella ventosa e la pressione atmosferica. Un livello di vuoto tipicamente usato nella documentazione tecnica per indicare le caratteristiche delle ventose è -0,7 Bar. A seconda dell altitudine, però, non è detto che questo livello di vuoto sia raggiungibile. In alcuni casi, invece del valore n 3, può essere indicata, direttamente, l area effettiva della ventosa a -0,7 Bar. Lo stesso vale per la forza di aspirazione.
128 Ventose Calcolo della forza di aspirazione necessaria Ventosa singola centrata sul baricentro - moto verticale F F s n 1 Somma di tutte le forze agenti sul pezzo Forza di sollevamento prodotta dalla ventosa Coefficiente di sicurezza sul distacco
129 Ventose Calcolo della forza di aspirazione necessaria Ventosa singola centrata sul baricentro - moto obliquo F S n1f Z n2fx µ Fattore di attrito n 2 Coefficiente di sicurezza sullo slittamento
130 Ventose Calcolo della forza di aspirazione necessaria Ventosa singola non centrata sul baricentro - moto verticale Fs R n1 F R r k 1 r R Coefficiente di eccentricità Distanza tra il centro di massa e l asse della ventosa Raggio esterno della ventosa Maggiore è il diametro della ventosa, minore è il rischio che un eventuale disassamento della ventosa rispetto al centro di massa induca momenti tali da portare al distacco del pezzo in presa.
131 Ventose Calcolo della forza di aspirazione necessaria Ventosa singola non centrata sul baricentro moto obliquo F s n1 k1 Fz n2 Fx
132 Ventose Calcolo della forza di aspirazione necessaria Ventosa singola orizzontale centrata sul baricentro moto verticale Una ventosa con asse orizzontale deve erogare il doppio della forza di presa rispetto ad una ventosa con asse verticale.
133 Ventose Calcolo della forza di aspirazione necessaria Ventosa singola verticale centrata sul baricentro moto obliquo oggetto di grosso spessore Nell equazione sopra riportata il termine contenente h risulta preponderante rispetto agli altri se h ed R sono molto diversi fra loro. X 2 X 1 Z 1 S F μ n F R h n n F F F x X 2 X 1 Z 1 S F n F R h n n F F
134 Ventose Calcolo della forza di aspirazione necessaria. Ventosa doppia verticale centrate sul baricentro moto obliquo oggetto di grosso spessore In questo caso è necessario considerare separatamente gli effetti dell equilibrio verticale orizzontale e rotativo. 2F F S S -Fn z 1 2r -H v1 H v1 H H v1 Hv2 μ Fx n2 n1 n2 FS Fz Fx 2 2μ H 2r n Fr n F h 0 1 z v2 v1 F S 0 H v2 F S 0 1 x


135 Ventose Calcolo della forza di aspirazione necessaria Ventose multiple moto generico oggetto generico Ad ogni modo il caso reale è generalmente più complesso dei casi precedentemente analizzati
136 Ventose Calcolo della forza di aspirazione necessaria Ventose multiple moto generico oggetto generico c B c R Sauger M z y F xy elastischer Rahmen c B c R c R X Werkstück Per modellizzare i sistemi a più ventose è necessario considerarle come vincoli elastici in modo da evitare l iperstaticità. Per risolvere i sistemi derivanti da questa modellizzazione è opportuno ricorrere a specifici tools di calcolo. c R Sauger y c R X c R Werkstück n i n i 0 c i Ri y c Ri n i n i 0 i c Ri x c Ri n i i n i ( x n 2 i y c i i x c y Ri 2 i Ri ) c Ri x y z F F M x y z

137 Ventose Calcolo della forza di aspirazione necessaria Ventose multiple moto generico oggetto generico Con i software di simulazione, ipotizzando il tipo e la disposizione delle ventose ed inserendo i dati dell applicazione, è possibile effettuare un analisi dettagliata dello sfruttamento di ogni ventosa.

138 Ventose Calcolo della forza di aspirazione necessaria Ventose multiple moto generico oggetto generico Sfruttamento delle singole ventose durante le varie fasi operative.


139 Ventose Esempi di sistemi di presa complessi
140 Ventose Esempi di sistemi di presa complessi
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Cilindri Idraulici a staffa rotante
 Cilindri Idraulici a staffa rotante Cilindri idraulici a staffa rotante, a doppio effetto Pressione di esercizio max. 250 bar Versione attivabile Questa nuova versione, migliorata di attrezzi a staffa
Cilindri Idraulici a staffa rotante Cilindri idraulici a staffa rotante, a doppio effetto Pressione di esercizio max. 250 bar Versione attivabile Questa nuova versione, migliorata di attrezzi a staffa
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
MOTORI CON PISTONI A PRISMA ROMBICO SNODATO
 MOTORI CON PISTONI A PRISMA ROMBICO SNODATO Brevetto di invenzione industriale depositato il 18/11/2008 N TO 2008 A 000847 Vittorio Scialla, Via Cibrario 114, 10143 Torino vittorio.scialla@strumentiperleaziende.com
MOTORI CON PISTONI A PRISMA ROMBICO SNODATO Brevetto di invenzione industriale depositato il 18/11/2008 N TO 2008 A 000847 Vittorio Scialla, Via Cibrario 114, 10143 Torino vittorio.scialla@strumentiperleaziende.com
ROBOT SCARA PESANTE ROBOT
 ROBOT SCARA Apiel realizza due modelli di robot SCARA che trovano la loro applicazione principale per la realizzazione di isole di pallettizzazione. I due modelli si differenziano per la portata al polso
ROBOT SCARA Apiel realizza due modelli di robot SCARA che trovano la loro applicazione principale per la realizzazione di isole di pallettizzazione. I due modelli si differenziano per la portata al polso
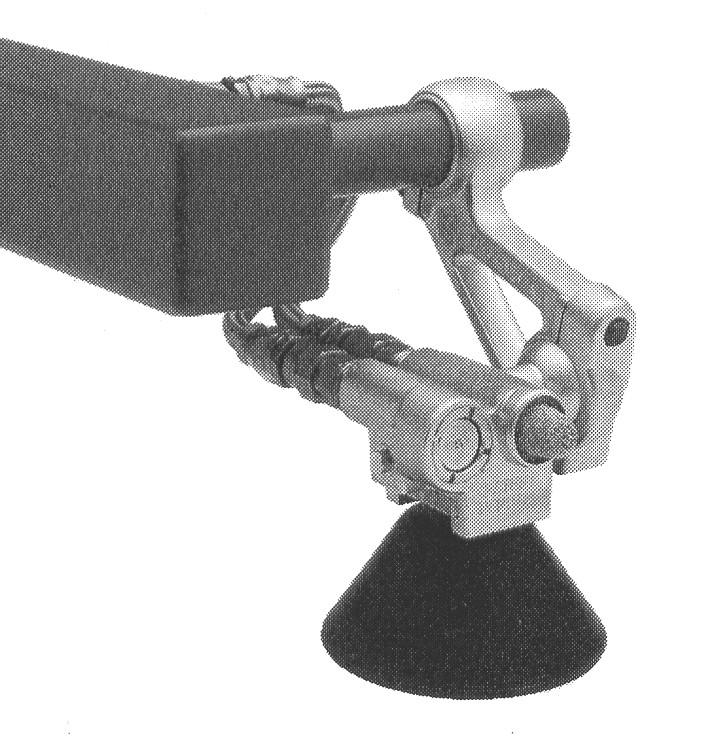
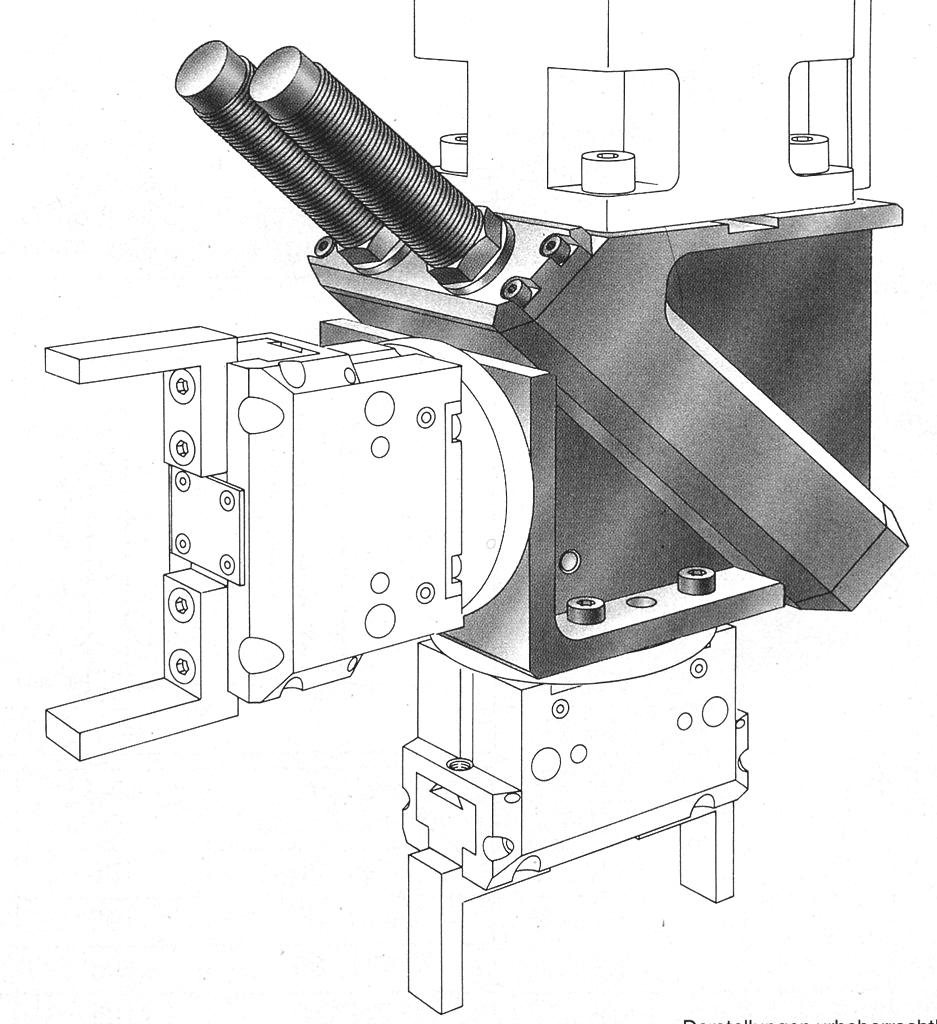
KipAPPL.pdf Edizione 12-00. ➀ = ULS 160, ➁ = RCH, ➂ = Pinza RP 17
 KipAPPL.pdf Edizione 12-00 CARICO E SCARICO DI PEZZI FUSI DI OTTONE Diversi pezzi fusi di ottone vengono caricati e scaricati dalle macchine utensili e quindi disposti su pallet. Diversi tipi di pezzi
KipAPPL.pdf Edizione 12-00 CARICO E SCARICO DI PEZZI FUSI DI OTTONE Diversi pezzi fusi di ottone vengono caricati e scaricati dalle macchine utensili e quindi disposti su pallet. Diversi tipi di pezzi
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
-V- Novità. Tavole rotanti DHTG Caratteristiche
 Caratteristiche Dati generali Meccanica robusta Semplice progettazione e messa in funzione Divisioni: 2, 3, 4, 6, 8, 12, 24 Accelerazione graduale su una linea sinusoidale Varianti di azionamento: rotazione
Caratteristiche Dati generali Meccanica robusta Semplice progettazione e messa in funzione Divisioni: 2, 3, 4, 6, 8, 12, 24 Accelerazione graduale su una linea sinusoidale Varianti di azionamento: rotazione
HandlingTech. Automations-Systeme PRONTO SOCCORSO IN CASO DI ROTTURA DELL'UTENSILE. www.handlingtech.de/eromobil
 HandlingTech PRONTO SOCCORSO IN CASO DI ROTTURA DELL'UTENSILE www.handlingtech.de/eromobil eromobil - La soluzione in caso di rottura dell'utensile Il nuovo eromobil Più compatto, più funzionale, più pratico
HandlingTech PRONTO SOCCORSO IN CASO DI ROTTURA DELL'UTENSILE www.handlingtech.de/eromobil eromobil - La soluzione in caso di rottura dell'utensile Il nuovo eromobil Più compatto, più funzionale, più pratico
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Collegamenti verticali meccanizzati: ascensori
 Collegamenti verticali meccanizzati: ascensori Definizioni Sistemi meccanizzati che permettono l interrelazione ed il collegamento tra spazi posizionati su differenti quote di uno o più edifici. Argomento
Collegamenti verticali meccanizzati: ascensori Definizioni Sistemi meccanizzati che permettono l interrelazione ed il collegamento tra spazi posizionati su differenti quote di uno o più edifici. Argomento
Centri C.N.C. Free&Easy Smile
 Centri C.N.C. Centri C.N.C. ll mini centro di lavoro professionale JOLLY è una apparecchiatura a 5 assi, nata per soddisfare le esigenze dei laboratori e centri di fresaggio più ambiziosi. Può eseguire
Centri C.N.C. Centri C.N.C. ll mini centro di lavoro professionale JOLLY è una apparecchiatura a 5 assi, nata per soddisfare le esigenze dei laboratori e centri di fresaggio più ambiziosi. Può eseguire
Banco di assemblaggio e collaudo cilindri idraulici BAT-H 35
 Banco di assemblaggio e collaudo cilindri idraulici BAT-H 35 Sistemi per l automazione industriale Progettazione elettrica meccanica e software industriali Quadri e impianti elettrici Macchine speciali
Banco di assemblaggio e collaudo cilindri idraulici BAT-H 35 Sistemi per l automazione industriale Progettazione elettrica meccanica e software industriali Quadri e impianti elettrici Macchine speciali
RINFORZO DEL COLLEGAMENTO TRAVE- PILASTRO
 35/83 RINFORZO DEL COLLEGAMENTO TRAVE- PILASTRO 36/83 RINFORZO DEL COLLEGAMENTO IN COPERTURA PROBLEMI IN COPERTURA MASSA PREVALENTEMENTE CONCENTRATA IN COPERTURA COLLEGAMENTI NON PROGETTATI PER SOPPORTARE
35/83 RINFORZO DEL COLLEGAMENTO TRAVE- PILASTRO 36/83 RINFORZO DEL COLLEGAMENTO IN COPERTURA PROBLEMI IN COPERTURA MASSA PREVALENTEMENTE CONCENTRATA IN COPERTURA COLLEGAMENTI NON PROGETTATI PER SOPPORTARE
Esempio prova di esonero Fisica Generale I C.d.L. ed.u. Informatica
 Esempio prova di esonero Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. Se il caffè costa 4000 /kg (lire al chilogrammo), quanto costa all incirca alla libbra? (a) 1800 ; (b) 8700 ; (c) 18000
Esempio prova di esonero Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. Se il caffè costa 4000 /kg (lire al chilogrammo), quanto costa all incirca alla libbra? (a) 1800 ; (b) 8700 ; (c) 18000
Corso di Laurea in FARMACIA
 Corso di Laurea in FARMACIA 2015 simulazione 1 FISICA Cognome nome matricola a.a. immatric. firma N Evidenziare le risposte esatte Una sferetta è appesa con una cordicella al soffitto di un ascensore fermo.
Corso di Laurea in FARMACIA 2015 simulazione 1 FISICA Cognome nome matricola a.a. immatric. firma N Evidenziare le risposte esatte Una sferetta è appesa con una cordicella al soffitto di un ascensore fermo.
ITIS OTHOCA ORISTANO INNESTI E FRIZIONI
 ITIS OTHOCA ORISTANO INNESTI E FRIZIONI Prof. Ignazio Peddis A.S. 2007/08 Gli innesti Si definisce INNESTO un organo meccanico capace di rendere solidali due estremità di albero coassiali, in modo da permettere
ITIS OTHOCA ORISTANO INNESTI E FRIZIONI Prof. Ignazio Peddis A.S. 2007/08 Gli innesti Si definisce INNESTO un organo meccanico capace di rendere solidali due estremità di albero coassiali, in modo da permettere
Agostinetti Piero (425902/IM)
") UNIVERSITA DEGLI STUDI DI PADOVA FACOLTA DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica LABORATORIO DI ANALISI STRUTTURALE CON ANSYS 5.6: VERIFICHE STRUTTURALI PER IL BILANCERE DELLA PIATTAFORMA
UNIVERSITA DEGLI STUDI DI PADOVA FACOLTA DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica LABORATORIO DI ANALISI STRUTTURALE CON ANSYS 5.6: VERIFICHE STRUTTURALI PER IL BILANCERE DELLA PIATTAFORMA
Kit Meccanica. Codice: 165203 Prezzo: 465,00
 Codice: 165203 Prezzo: 465,00 Descrizione In dotazione 1 Carrello sperimentale, massa 50 g, basso attrito, con supporto per masse additive con intaglio da 50 o 10 g 1 Metro a nastro avvolgibile in custodia
Codice: 165203 Prezzo: 465,00 Descrizione In dotazione 1 Carrello sperimentale, massa 50 g, basso attrito, con supporto per masse additive con intaglio da 50 o 10 g 1 Metro a nastro avvolgibile in custodia
oikos centro di lavoro a 6 assi per travi e moduli parete oikos
 oikos centro di lavoro a 6 assi per travi e moduli parete oikos oikos centro di lavoro a 6 assi per travi e moduli pareti. Centro di lavoro a 6 assi, soluzione tecnologica ottimale per la lavorazione di
oikos centro di lavoro a 6 assi per travi e moduli parete oikos oikos centro di lavoro a 6 assi per travi e moduli pareti. Centro di lavoro a 6 assi, soluzione tecnologica ottimale per la lavorazione di
CARGO DIGGER PLANT RESISTENTE, INTELLIGENTE, UTILE
 60 61 CARGO DIGGER PLANT RESISTENTE, INTELLIGENTE, UTILE L'innovativo carrello CarGO Digger Plant costituisce un'ottima soluzione per trasportare macchinari ed escavatori. Per il tipo di carichi che deve
60 61 CARGO DIGGER PLANT RESISTENTE, INTELLIGENTE, UTILE L'innovativo carrello CarGO Digger Plant costituisce un'ottima soluzione per trasportare macchinari ed escavatori. Per il tipo di carichi che deve
La pressione è una grandezza fisica, definita come il rapporto tra la forza agente normalmente su una superficie e la superficie stessa.
 Pressione La pressione è una grandezza fisica, definita come il rapporto tra la forza agente normalmente su una superficie e la superficie stessa. E originata dallo scambio di forze fra le molecole del
Pressione La pressione è una grandezza fisica, definita come il rapporto tra la forza agente normalmente su una superficie e la superficie stessa. E originata dallo scambio di forze fra le molecole del
MURI DI SOSTEGNO. a cura del professore. Francesco Occhicone
 MURI DI SOSTEGNO a cura del professore Francesco Occhicone anno 2014 MURI DI SOSTEGNO Per muro di sostegno si intende un opera d arte con la funzione principale di sostenere o contenere fronti di terreno
MURI DI SOSTEGNO a cura del professore Francesco Occhicone anno 2014 MURI DI SOSTEGNO Per muro di sostegno si intende un opera d arte con la funzione principale di sostenere o contenere fronti di terreno
Sistema MSP. Hilti. Passione. Performance.
 Sistema MSP Hilti. Passione. Performance. Prodotti Ganci per tetto MSP-RH Pagina 204 Ganci per tetto MSP-RH-A Pagina 205 Gancio per tetto MSP-RH-B Pagina 205 Gancio per tetto MSP-RH-S Pagina 206 Gancio
Sistema MSP Hilti. Passione. Performance. Prodotti Ganci per tetto MSP-RH Pagina 204 Ganci per tetto MSP-RH-A Pagina 205 Gancio per tetto MSP-RH-B Pagina 205 Gancio per tetto MSP-RH-S Pagina 206 Gancio
Il Metodo Scientifico
 Unita Naturali Il Metodo Scientifico La Fisica si occupa di descrivere ed interpretare i fenomeni naturali usando il metodo scientifico. Passi del metodo scientifico: Schematizzazione: modello semplificato
Unita Naturali Il Metodo Scientifico La Fisica si occupa di descrivere ed interpretare i fenomeni naturali usando il metodo scientifico. Passi del metodo scientifico: Schematizzazione: modello semplificato
EVAK 500 è esclusivamente riservato ai professionisti che abbiano ricevuto l addestramento richiesto per manovre di soccorso.
 evak 500 argano-paranco a corda a corsa illimitata concepito per operazioni di salvataggio e di evacuazione SOMMARIO Pagina Avvertenze importanti 2 1. Generalità 2 2. Sicurezza 3 3. Installazione 3 4.
evak 500 argano-paranco a corda a corsa illimitata concepito per operazioni di salvataggio e di evacuazione SOMMARIO Pagina Avvertenze importanti 2 1. Generalità 2 2. Sicurezza 3 3. Installazione 3 4.
Attuatori per piccole valvole
 Attuatori per piccole valvole con corsa nominale di 5.5 mm 4 891 80130 80117 SSB... senza SSB...1 con Attuatori elettromeccanici per valvole VMP45..., VVP45... e VXP45... Corsa nominale da 5.5 mm Comando
Attuatori per piccole valvole con corsa nominale di 5.5 mm 4 891 80130 80117 SSB... senza SSB...1 con Attuatori elettromeccanici per valvole VMP45..., VVP45... e VXP45... Corsa nominale da 5.5 mm Comando
Elevatore idraulico a carrello extra piatto 2,25 t
 Sollevatore idraulico telescopico Con due pistoni e grande altezza di sollevamento Protezione da sovraccarico da valvola di massima pressione Pistone lucidato a specchio, con lunga durata delle guarnizioni
Sollevatore idraulico telescopico Con due pistoni e grande altezza di sollevamento Protezione da sovraccarico da valvola di massima pressione Pistone lucidato a specchio, con lunga durata delle guarnizioni
4 FORZE FONDAMENTALI
 FORZA 4! QUANTE FORZE? IN NATURA POSSONO ESSERE OSSERVATE TANTE TIPOLOGIE DI FORZE DIVERSE: GRAVITA' O PESO, LA FORZA CHE SI ESERCITA TRA DUE MAGNETI O TRA DUE CORPI CARICHI, LA FORZA DEL VENTO O DELL'ACQUA
FORZA 4! QUANTE FORZE? IN NATURA POSSONO ESSERE OSSERVATE TANTE TIPOLOGIE DI FORZE DIVERSE: GRAVITA' O PESO, LA FORZA CHE SI ESERCITA TRA DUE MAGNETI O TRA DUE CORPI CARICHI, LA FORZA DEL VENTO O DELL'ACQUA
Cos è la SERIGRAFIA. Tecniche di Nobilitazione. seri = seta grafia = scrittura
 2 Cos è la SERIGRAFIA seri = seta grafia = scrittura La serigrafia è quel processo di stampa permeografico che, attraverso un sistema di tecniche, permette di depositare un inchiostro o una pasta con elevati
2 Cos è la SERIGRAFIA seri = seta grafia = scrittura La serigrafia è quel processo di stampa permeografico che, attraverso un sistema di tecniche, permette di depositare un inchiostro o una pasta con elevati
di manipolatori seriali
 Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
MACCHINE PER LA LAVORAZIONE DELLA LAMIERA
 MACCHINE PER LA LAVORAZIONE DELLA LAMIERA Cesoie 100% Made in Italy MACCHINE PER LA LAVORAZIONE DELLA LAMIERA VIMERCATI Vimercati è stata fondata nel 1973 come impresa a conduzione familiare, ed è ancora
MACCHINE PER LA LAVORAZIONE DELLA LAMIERA Cesoie 100% Made in Italy MACCHINE PER LA LAVORAZIONE DELLA LAMIERA VIMERCATI Vimercati è stata fondata nel 1973 come impresa a conduzione familiare, ed è ancora
29/1/2011 WWW.INCISIONE.INFO. Pantografi cnc Linea IT
 29/1/2011 WWW.INCISIONE.INFO Pantografi cnc Linea IT La linea IT è progettata e realizzata interamente in azienda. I componenti sono stati scelti con cura al fine di garantire al cliente una macchina con
29/1/2011 WWW.INCISIONE.INFO Pantografi cnc Linea IT La linea IT è progettata e realizzata interamente in azienda. I componenti sono stati scelti con cura al fine di garantire al cliente una macchina con
LE PIATTAFORME MOBILI ELEVABILI
 Università degli Studi di Napoli FEDERICO II Facoltà di Ingegneria LABORATORIO DI CANTIERE a.a. 2010-11 LE PIATTAFORME MOBILI ELEVABILI PIATTAFORME DI LAVORO MOBILI ELEVABILI Vengono definite Piattaforme
Università degli Studi di Napoli FEDERICO II Facoltà di Ingegneria LABORATORIO DI CANTIERE a.a. 2010-11 LE PIATTAFORME MOBILI ELEVABILI PIATTAFORME DI LAVORO MOBILI ELEVABILI Vengono definite Piattaforme
PARANCO ELETTRICO A CATENA GPM
 PARANCO ELETTRICO A CATENA GPM Ivan Muri, CEO Quale fabbricante svizzero, con una produzione completamente automatizzata, la nostra sede è nella zona industriale Svizzera. L'alto livello di funzionalità,
PARANCO ELETTRICO A CATENA GPM Ivan Muri, CEO Quale fabbricante svizzero, con una produzione completamente automatizzata, la nostra sede è nella zona industriale Svizzera. L'alto livello di funzionalità,
UGELLI PRESSA CON OTTURATORE
 UGELLI PRESSA CON OTTURATORE Tipo P Attuatore a pistone Tipo M Attuatore a molla SCHEDA TECNICA FEPA Srl via Monsagnasco 1B 10090 Villarbasse (TO) Tel.: +39 011 952.84.72 Fax: +39 011 952.048 info@fepa.it
UGELLI PRESSA CON OTTURATORE Tipo P Attuatore a pistone Tipo M Attuatore a molla SCHEDA TECNICA FEPA Srl via Monsagnasco 1B 10090 Villarbasse (TO) Tel.: +39 011 952.84.72 Fax: +39 011 952.048 info@fepa.it
VALVOLE DI SFIORO. Serie V. Process Management TM. Tipo V/20-2. Tipo V/50. Tipo V/60
 VALVOLE DI SFIORO Serie V Tipo V/2-2 Tipo V/5 Tipo V/6 Process Management TM Valvola di Sfioro ad Azione Diretta Serie V/5 e V/6 Le valvole di sfioro con comando a molla a scarico automatico hanno il compito
VALVOLE DI SFIORO Serie V Tipo V/2-2 Tipo V/5 Tipo V/6 Process Management TM Valvola di Sfioro ad Azione Diretta Serie V/5 e V/6 Le valvole di sfioro con comando a molla a scarico automatico hanno il compito
LABORATORIO SPERIMENTALE DI MISURE MECCANICHE A.A. 2003-2004 Lezione n.3 (15.10.03)
") LABORATORIO SPERIMENTALE DI MISURE MECCANICHE A.A. 2003-2004 Lezione n.3 (15.10.03) LA CATENA DI MISURAZIONE Qualsiasi catena di misurazione comprende un sensore, un elaboratore (o condizionatore), un
LABORATORIO SPERIMENTALE DI MISURE MECCANICHE A.A. 2003-2004 Lezione n.3 (15.10.03) LA CATENA DI MISURAZIONE Qualsiasi catena di misurazione comprende un sensore, un elaboratore (o condizionatore), un
Opzione manutentore impianti elettrici e automazione
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
MACCHINA PELLETTIZZATRICE
 MACCHINA PELLETTIZZATRICE Con la Pellettizzatrice N-PLUS potrete risparmiare denaro, ottenendo un basso costo di produzione del pellet, in quanto le nostre macchine sono state sviluppate al fine di generare
MACCHINA PELLETTIZZATRICE Con la Pellettizzatrice N-PLUS potrete risparmiare denaro, ottenendo un basso costo di produzione del pellet, in quanto le nostre macchine sono state sviluppate al fine di generare
GENERALITA E CARATTERISTICHE
 FIL-PEMTO S.p.A. (Div. GT FLEX) Sede operativa: Via Saronno, 225 21042 Caronno Pertusella (VA) Telefono: 02-96458166 / 02-96457700 Fax: 02-73965061 E-Mail: commerciale@gtflex.eu Sito: www.gtflex.eu MANICHETTE
FIL-PEMTO S.p.A. (Div. GT FLEX) Sede operativa: Via Saronno, 225 21042 Caronno Pertusella (VA) Telefono: 02-96458166 / 02-96457700 Fax: 02-73965061 E-Mail: commerciale@gtflex.eu Sito: www.gtflex.eu MANICHETTE
ESERCIZI PER LE VACANZE ESTIVE
 Opera Monte Grappa ESERCIZI PER LE VACANZE ESTIVE Claudio Zanella 14 2 ESERCIZI: Calcolo della resistenza di un conduttore filiforme. 1. Calcola la resistenza di un filo di rame lungo 100m e della sezione
Opera Monte Grappa ESERCIZI PER LE VACANZE ESTIVE Claudio Zanella 14 2 ESERCIZI: Calcolo della resistenza di un conduttore filiforme. 1. Calcola la resistenza di un filo di rame lungo 100m e della sezione
Serie L-730/740. Sistemi Laser per allineamenti geometrici. Singolo asse/multi asse Analisi e allineamenti precisi
 Sistemi Laser per allineamenti geometrici Serie L-730/740 Singolo asse/multi asse Analisi e allineamenti precisi PERCHE UN ALLINEAMENTO LASER? PLANARITA Prima o poi ogni cosa ha bisogno di essere allineata.
Sistemi Laser per allineamenti geometrici Serie L-730/740 Singolo asse/multi asse Analisi e allineamenti precisi PERCHE UN ALLINEAMENTO LASER? PLANARITA Prima o poi ogni cosa ha bisogno di essere allineata.
FRX300basic FRX300 FRESATRICE PER LA CREAZIONE DI MODELLI PER OREFICERIA. Fresatrice CNC completa di:
 FRX300basic Fresatrice CNC completa di: * Elettromandrino con cambio utensili da 60.000 giri Pressurizzato, con cambio cono utensili pneumatico, cuscinetti ceramici. Pinze max.6 mm. *Gruppo di nr. 2 morse
FRX300basic Fresatrice CNC completa di: * Elettromandrino con cambio utensili da 60.000 giri Pressurizzato, con cambio cono utensili pneumatico, cuscinetti ceramici. Pinze max.6 mm. *Gruppo di nr. 2 morse
Illustrazione 1: Telaio. Piantanida Simone 1 G Scopo dell'esperienza: Misura di grandezze vettoriali
 Piantanida Simone 1 G Scopo dell'esperienza: Misura di grandezze vettoriali Materiale utilizzato: Telaio (carrucole,supporto,filo), pesi, goniometro o foglio con goniometro stampato, righello Premessa
Piantanida Simone 1 G Scopo dell'esperienza: Misura di grandezze vettoriali Materiale utilizzato: Telaio (carrucole,supporto,filo), pesi, goniometro o foglio con goniometro stampato, righello Premessa
150 m. 75 m. fino a 50 m
 200 m e oltre 150 m 75 m fino a 50 m LEGENDA Braccio Pompa HPC Braccetto Tubo standard Pompa PC Tubo LLP I BRACCI DI DISTRIBUZIONE MANUALI Modello RR Modello RT 3504 12000-15000 2950 12000 900 900 3290
200 m e oltre 150 m 75 m fino a 50 m LEGENDA Braccio Pompa HPC Braccetto Tubo standard Pompa PC Tubo LLP I BRACCI DI DISTRIBUZIONE MANUALI Modello RR Modello RT 3504 12000-15000 2950 12000 900 900 3290
Le macchine in corrente continua sono composte da una parte fissa (statore o induttore) e da una parte rotante (rotore o indotto).
 e da una parte rotante (rotore o indotto).") Il motore in c.c. è stato il motore elettrico maggiormente impiegato negli azionamenti a velocità variabile; ciò è dovuto sia alla maggiore semplicità costruttiva dei convertitori con uscita in corrente
Il motore in c.c. è stato il motore elettrico maggiormente impiegato negli azionamenti a velocità variabile; ciò è dovuto sia alla maggiore semplicità costruttiva dei convertitori con uscita in corrente
FAST SCANNING POINT AUTOFOCUS 3D LASER PROBE Sistema automatico di microscansione con Spot Laser 3D per misure dimensionali 3D non a contatto
 FAST SCANNING POINT AUTOFOCUS 3D LASER PROBE Sistema automatico di microscansione con Spot Laser 3D per misure dimensionali 3D non a contatto Microscopio con Testa Laser 3D / 5 Assi motorizzati Micro scansioni
FAST SCANNING POINT AUTOFOCUS 3D LASER PROBE Sistema automatico di microscansione con Spot Laser 3D per misure dimensionali 3D non a contatto Microscopio con Testa Laser 3D / 5 Assi motorizzati Micro scansioni
Joystick Idraulici Biasse Serie JH4 03.JH4-0910
 Joystick Idraulici Biasse Serie JH4 03.JH4-0910 Indice del contenuto: Generalità & caratteristiche tecniche: Pag. 3 Schemi idraulici interni: Pag. 4 Schemi idraulici di collegamento: Pag. 5 Curve di regolazione:
Joystick Idraulici Biasse Serie JH4 03.JH4-0910 Indice del contenuto: Generalità & caratteristiche tecniche: Pag. 3 Schemi idraulici interni: Pag. 4 Schemi idraulici di collegamento: Pag. 5 Curve di regolazione:
Ita 08-2009-AFC 127 FIL-SISTEMI
 Ita 08-2009-AFC 127 Azienda specializzata nella produzione di alesatrici e fresatrici. Si è sviluppata mantenendo una tradizione e una qualificazione molto alta tesa al soddisfacimento delle esigenze più
Ita 08-2009-AFC 127 Azienda specializzata nella produzione di alesatrici e fresatrici. Si è sviluppata mantenendo una tradizione e una qualificazione molto alta tesa al soddisfacimento delle esigenze più
Allegato al foglio tecnico riduttori 5801 10/06/04
 Gestra Elettronica Industriale - Gruppo A Riduttore di pressione Gestra Mod 501 Edizione 05/0 501 Applicazioni I riduttori autoazionati Gestra 501 vengono utilizzati per mantenere costante la pressione
Gestra Elettronica Industriale - Gruppo A Riduttore di pressione Gestra Mod 501 Edizione 05/0 501 Applicazioni I riduttori autoazionati Gestra 501 vengono utilizzati per mantenere costante la pressione
Diversamente dal caso precedente, che si concentrava sullo schema della trave appoggiata, affrontiamo ora il dimensionamento di una trave a sbalzo.
 Come nell esercitazione precedente cerchiamo di dimensionare una trave, per la quale sono state scelte 3 soluzioni tipologiche: legno, acciaio e cemento armato. Diversamente dal caso precedente, che si
Come nell esercitazione precedente cerchiamo di dimensionare una trave, per la quale sono state scelte 3 soluzioni tipologiche: legno, acciaio e cemento armato. Diversamente dal caso precedente, che si
Per un ambiente di lavoro più pulito e sicuro PULITORI PER TAPPETI NASTRI TRASPORTATORI
 Per un ambiente di lavoro più pulito e sicuro 2012 PULITORI PER TAPPETI NASTRI TRASPORTATORI - PULITORI PER TAPPETI DI NASTRI TRASPORTATORI 2012 by BARRA PROJECT INTERNATIONAL S.r.l. Tutti i diritti sono
Per un ambiente di lavoro più pulito e sicuro 2012 PULITORI PER TAPPETI NASTRI TRASPORTATORI - PULITORI PER TAPPETI DI NASTRI TRASPORTATORI 2012 by BARRA PROJECT INTERNATIONAL S.r.l. Tutti i diritti sono
ISTITUTI ALDINI VALERIANI E SIRANI. Disegno di un motore Piaggio e studio del manovellismo
 SCUOLE TECNICHE BOLOGNESI ISTITUTI ALDINI VALERIANI E SIRANI Corso di studio Tecnico Industriale specializzazione Meccanica anno 5^ Disegno di un motore Piaggio e studio del manovellismo Tesi di: Emanuele
SCUOLE TECNICHE BOLOGNESI ISTITUTI ALDINI VALERIANI E SIRANI Corso di studio Tecnico Industriale specializzazione Meccanica anno 5^ Disegno di un motore Piaggio e studio del manovellismo Tesi di: Emanuele
GLI AZIONAMENTI ELETTRICI
 Capitolo 3 GLI AZIONAMENTI ELETTRICI 1.1 Definizioni e struttura di un azionamento elettrico Se nella conversione elettromeccanica dell'energia si desidera ottenere un'energia meccanica pregiata con coppia
Capitolo 3 GLI AZIONAMENTI ELETTRICI 1.1 Definizioni e struttura di un azionamento elettrico Se nella conversione elettromeccanica dell'energia si desidera ottenere un'energia meccanica pregiata con coppia
Former Fab progetta e realizza tubi formatori, anche conosciuti come colletti formatori, dispositivi pieghevoli, o formatori.
 www.landopack.com info@landopack.com tel +39 0424 54 90 97 mob +39 334 94 86 028 Former Fab progetta e realizza tubi formatori, anche conosciuti come colletti formatori, dispositivi pieghevoli, o formatori.
www.landopack.com info@landopack.com tel +39 0424 54 90 97 mob +39 334 94 86 028 Former Fab progetta e realizza tubi formatori, anche conosciuti come colletti formatori, dispositivi pieghevoli, o formatori.
SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI
 SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI LA FORZA DELLE IDEE NELL AUTOMAZIONE SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI La nostra esperienza decennale nel recepire
SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI LA FORZA DELLE IDEE NELL AUTOMAZIONE SOLUZIONI PER L ASSEMBLAGGIO E IL COLLAUDO DI ELETTRODOMESTICI La nostra esperienza decennale nel recepire
a.a. 2012/2013 CORSO DI LAUREA IN INGEGNERIA CIVILE
 TIPOLOGIE DI SOLAIO a.a. 2012/2013 CORSO DI LAUREA IN INGEGNERIA CIVILE FRANCESCO MICELLI TIPOLOGIE Gettati in opera Parzialmente prefabbricati Completamente prefabbricati Monodirezionali Bidirezionali
TIPOLOGIE DI SOLAIO a.a. 2012/2013 CORSO DI LAUREA IN INGEGNERIA CIVILE FRANCESCO MICELLI TIPOLOGIE Gettati in opera Parzialmente prefabbricati Completamente prefabbricati Monodirezionali Bidirezionali
Elementi elastici, particolari 3.1 3.2 3.3 4.1 4.2 4.3 4.4 4.5 4.6 5.1 6.1 6.2 6.3 6.4 7.1 7.2 7.3 8.1 9.1
 Tecnologia dell antivibrazione Elementi elastici, particolari stampati in Elementi elastici Molle 7.. Molle cave 7..5 Elementi di fissaggio 7..7 Lastre e molle 7..9 Puffer 7..6 Molle pneumatiche 7..7 Stabilizzatori
Tecnologia dell antivibrazione Elementi elastici, particolari stampati in Elementi elastici Molle 7.. Molle cave 7..5 Elementi di fissaggio 7..7 Lastre e molle 7..9 Puffer 7..6 Molle pneumatiche 7..7 Stabilizzatori
Azienda con sistema di qualità certificato
 Azienda con sistema di qualità certificato SISTEMA ANTICADUTA A BINARIO SISTEMA ANTICADUTA A BINARIO Sicurezza in copertura con bassissimo impatto visivo Binario utilizzabile per creare: Linee Vita rigide
Azienda con sistema di qualità certificato SISTEMA ANTICADUTA A BINARIO SISTEMA ANTICADUTA A BINARIO Sicurezza in copertura con bassissimo impatto visivo Binario utilizzabile per creare: Linee Vita rigide
GTTS5: Processi produttivi innovativi. Introduzione R-0353-D0415-CI-I 1
 GTTS5: Processi produttivi innovativi Introduzione R-0353-D0415-CI-I 1 Facts and figures 3D Printing Impact (CSC Source) 2 Le sfide specifiche Obiettivo della linea di intervento LI5: Processi produttivi
GTTS5: Processi produttivi innovativi Introduzione R-0353-D0415-CI-I 1 Facts and figures 3D Printing Impact (CSC Source) 2 Le sfide specifiche Obiettivo della linea di intervento LI5: Processi produttivi
Rexroth Pneumatics. Cilindro senz asta Cilindri senza stelo. Pressione di esercizio min/max Temperatura ambiente min./max.
 Rexroth Pneumatics 1 Pressione di esercizio min/max 2 bar / 8 bar Temperatura ambiente min./max. -10 C / +60 C Fluido Aria compressa Dimensione max. particella 5 µm contenuto di olio dell aria compressa
Rexroth Pneumatics 1 Pressione di esercizio min/max 2 bar / 8 bar Temperatura ambiente min./max. -10 C / +60 C Fluido Aria compressa Dimensione max. particella 5 µm contenuto di olio dell aria compressa
SEALING PARTS S.p.A. GUARNIZIONI DI TENUTA. Sezione C
 SEALING PARTS S.p.A. GUARNIZIONI DI TENUTA Sezione C GUARNIZIONI PER PISTONE TIPO DAS Le guarnizioni per pistone a doppio effetto con tenuta centrale, supporti e guide alle estremità hanno trovato larga
SEALING PARTS S.p.A. GUARNIZIONI DI TENUTA Sezione C GUARNIZIONI PER PISTONE TIPO DAS Le guarnizioni per pistone a doppio effetto con tenuta centrale, supporti e guide alle estremità hanno trovato larga
ISO 14001 Certificate N 12-E-0200545-TIC. ISO 9001 Certificate N 12-Q-0200545-TIC. Pompa a pistoni assiali per circuito aperto versione per Fan Drive
 HYDRAULIC COMPONENTS HYDROSTATIC TRANSMISSIONS GEARBOXES - ACCESSORIES Certified Company ISO 9001-14001 ISO 9001 Certificate N 12-Q-0200545-TIC ISO 14001 Certificate N 12-E-0200545-TIC Via M. L. King,
HYDRAULIC COMPONENTS HYDROSTATIC TRANSMISSIONS GEARBOXES - ACCESSORIES Certified Company ISO 9001-14001 ISO 9001 Certificate N 12-Q-0200545-TIC ISO 14001 Certificate N 12-E-0200545-TIC Via M. L. King,
ACCESSORI COMPONIBILI DI SUPPORTO
 officina meccanica LOTTERO GIOVANNI s.n.c Uffici e stabilimento: Via Molare 62-D 15076 OVADA (AL) Italia Tel. 0143 81446 Fax 0143 832521 e-mail: info@lotterosnc.it sito internet: www.lotterosnc.it ACCESSORI
officina meccanica LOTTERO GIOVANNI s.n.c Uffici e stabilimento: Via Molare 62-D 15076 OVADA (AL) Italia Tel. 0143 81446 Fax 0143 832521 e-mail: info@lotterosnc.it sito internet: www.lotterosnc.it ACCESSORI
ITT BUONARROTI MATERIA: S.I. FISICA E LABORATORIO
 ITT BUONARROTI MATERIA: S.I. FISICA E LABORATORIO Programmazione 2013-2014 Quella che viene qui presentato è la programmazione per moduli disciplinari, nel quale vengono evidenziati: l idea stimolo; i
ITT BUONARROTI MATERIA: S.I. FISICA E LABORATORIO Programmazione 2013-2014 Quella che viene qui presentato è la programmazione per moduli disciplinari, nel quale vengono evidenziati: l idea stimolo; i
Dimensione max. particella 5 µm. Pressione per determinare le forze del pistone 6,3 bar. Materiali:
 Cilindro senz asta Cilindri senza stelo 1 Pressione di esercizio min/max 2 bar / 8 bar Temperatura ambiente min./max. -10 C / +60 C Fluido Aria compressa Dimensione max. particella 5 µm contenuto di olio
Cilindro senz asta Cilindri senza stelo 1 Pressione di esercizio min/max 2 bar / 8 bar Temperatura ambiente min./max. -10 C / +60 C Fluido Aria compressa Dimensione max. particella 5 µm contenuto di olio
Calcolo delle perdite di carico
 9 Calcolo delle perdite di carico 9.1 Canali Il seguente paragrafo sarà dedicato alla descrizione delle perdite di carico nei canali anche se tutto il manuale è dedicato alle tubazioni per il trasporto
9 Calcolo delle perdite di carico 9.1 Canali Il seguente paragrafo sarà dedicato alla descrizione delle perdite di carico nei canali anche se tutto il manuale è dedicato alle tubazioni per il trasporto
MOTORI TRIFASE NORMALI ED AUTOFRENANTI
 RIDUTTORI PENDOLARI RINVII AD ANGOLO RIDUTTORI EPICICLOIDALI DISTRIBUTORE PER LA CAMPANIA MOTORIDUTTORI HYCLEAN MOTORI TRIFASE NORMALI ED AUTOFRENANTI SERVOMOTORIDUTTORI SINCRONI E ASINCRONI MOTORIDUTTORI
RIDUTTORI PENDOLARI RINVII AD ANGOLO RIDUTTORI EPICICLOIDALI DISTRIBUTORE PER LA CAMPANIA MOTORIDUTTORI HYCLEAN MOTORI TRIFASE NORMALI ED AUTOFRENANTI SERVOMOTORIDUTTORI SINCRONI E ASINCRONI MOTORIDUTTORI
UNIVERSITÀ DEGLI STUDI DI PADOVA Facoltà di Ingegneria A.A. 2009/10
 UNIVERSITÀ DEGLI STUDI DI PDOV Facoltà di Ingegneria Corso di Disegno Tecnico Industriale per i Corsi di Laurea triennale in Ingegneria Meccanica e in Ingegneria dell Energia Costruzioni geometriche in
UNIVERSITÀ DEGLI STUDI DI PDOV Facoltà di Ingegneria Corso di Disegno Tecnico Industriale per i Corsi di Laurea triennale in Ingegneria Meccanica e in Ingegneria dell Energia Costruzioni geometriche in
Approccio Meccatronico alla progettazione. Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation
 Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
1.11.3 Distribuzione di carica piana ed uniforme... 32
 Indice 1 Campo elettrico nel vuoto 1 1.1 Forza elettromagnetica............ 2 1.2 Carica elettrica................ 3 1.3 Fenomeni elettrostatici............ 6 1.4 Legge di Coulomb.............. 9 1.5 Campo
Indice 1 Campo elettrico nel vuoto 1 1.1 Forza elettromagnetica............ 2 1.2 Carica elettrica................ 3 1.3 Fenomeni elettrostatici............ 6 1.4 Legge di Coulomb.............. 9 1.5 Campo
L impugnatura mobile facilita l utilizzo nel piazzamento.
 La soluzione più potente per la lavorazione di estremità di tubi! Sistema di il serraggio rapido delle placchette QTC (Quick-Tool-Change). Regolazione rapida della dimensione di taglio. L impugnatura mobile
La soluzione più potente per la lavorazione di estremità di tubi! Sistema di il serraggio rapido delle placchette QTC (Quick-Tool-Change). Regolazione rapida della dimensione di taglio. L impugnatura mobile
Direzione e Depositi:
 ETROLCHIMICA Sede Legale e Uffici: Via P. Rondoni,1 20146 Milano Tel. 0039 02 42 41 421 Fax 0039 02 47 71 93 72 E-mail: venditemilano@sicamtubi.com Direzione e Depositi: Via Marziana, 21 27020 Parona Lomellina
ETROLCHIMICA Sede Legale e Uffici: Via P. Rondoni,1 20146 Milano Tel. 0039 02 42 41 421 Fax 0039 02 47 71 93 72 E-mail: venditemilano@sicamtubi.com Direzione e Depositi: Via Marziana, 21 27020 Parona Lomellina
Il Solare a Concentrazione
 Tecnologie delle Energie Rinnovabili Il Solare a Concentrazione Prof. Daniele Cocco Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali, Università di Cagliari daniele.cocco@unica.it http://people.unica.it/danielecocco/
Tecnologie delle Energie Rinnovabili Il Solare a Concentrazione Prof. Daniele Cocco Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali, Università di Cagliari daniele.cocco@unica.it http://people.unica.it/danielecocco/
SECONDO BIENNIO ISTITUTO TECNICO ELETTRONICA ED ELETTROTECNICA
 SETTORE TECNOLOGICO ISTITUTO TECNICO INDIRIZZO ELETTRONICA ED ELETTROTECNICA ARTICOLAZIONE ELETTRONICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento, Art.5, comma 1 Nota: Le Competenze,
SETTORE TECNOLOGICO ISTITUTO TECNICO INDIRIZZO ELETTRONICA ED ELETTROTECNICA ARTICOLAZIONE ELETTRONICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento, Art.5, comma 1 Nota: Le Competenze,
PERIZIA TECNICA RIFERIMENTO: AUMENTO VELOCITA MOTO OSCILLATORIO CAMPANE PARROCCHIA DI BREGUZZO (TN) VERIFICA TECNICA
 VERIFICA TECNICA") PERIZIA TECNICA RIFERIMENTO: AUMENTO VELOCITA MOTO OSCILLATORIO CAMPANE PARROCCHIA DI BREGUZZO (TN) COMMITTENTE: ELETTROIMPIANTI AUDEMA - CASTREZZATO (BS) OGGETTO: VERIFICA TECNICA PREMESSE Il sottoscritto
PERIZIA TECNICA RIFERIMENTO: AUMENTO VELOCITA MOTO OSCILLATORIO CAMPANE PARROCCHIA DI BREGUZZO (TN) COMMITTENTE: ELETTROIMPIANTI AUDEMA - CASTREZZATO (BS) OGGETTO: VERIFICA TECNICA PREMESSE Il sottoscritto
Anelli di usura & strisce cuscinetto. per cilindri idraulici
 Anelli di usura & strisce cuscinetto per cilindri idraulici per cilindri idraulici Anelli di usura & strisce cuscinetto ACM Bearings Ltd da oltre vent anni progetta, produce e fornisce anelli di usura
Anelli di usura & strisce cuscinetto per cilindri idraulici per cilindri idraulici Anelli di usura & strisce cuscinetto ACM Bearings Ltd da oltre vent anni progetta, produce e fornisce anelli di usura
RELAZIONE DI CALCOLO
 COMUNE DI MILANO Settore Edilizia Scolastica GRUPPO 5 - ZONA 6 - SCUOLA N 6488 -------- RELAZIONE DI CALCOLO RELAZIONE DI CALCOLO DI DIMENSIONAMENTO DELLA RETE ANTINCENDIO NELLA SCUOLA ELEMENTARE IN VIA
COMUNE DI MILANO Settore Edilizia Scolastica GRUPPO 5 - ZONA 6 - SCUOLA N 6488 -------- RELAZIONE DI CALCOLO RELAZIONE DI CALCOLO DI DIMENSIONAMENTO DELLA RETE ANTINCENDIO NELLA SCUOLA ELEMENTARE IN VIA
FARMACEUTICA CHIMICA ALIMENTARE
 FARMACEUTICA CHIMICA ALIMENTARE Prodotti specifici per settori: FARMACEUTICA CHIMICA ALIMENTARE Questi settori richiedono un attenzione particolare nell impiego di materiali adatti ai vari processi produttivi.
FARMACEUTICA CHIMICA ALIMENTARE Prodotti specifici per settori: FARMACEUTICA CHIMICA ALIMENTARE Questi settori richiedono un attenzione particolare nell impiego di materiali adatti ai vari processi produttivi.
ISTRUZIONI DI MONTAGGIO E COLLEGAMENTO
 L' è un attuatore elettromeccanico irreversibile a braccio articolato con lubrificazione a grasso per applicazioni residenziali con pilastri ed ante di peso max pari a 180kg ed 1,8 mt di lunghezza. Alimentazione
L' è un attuatore elettromeccanico irreversibile a braccio articolato con lubrificazione a grasso per applicazioni residenziali con pilastri ed ante di peso max pari a 180kg ed 1,8 mt di lunghezza. Alimentazione
Interruttori di posizione con funzione di sicurezza
 Campo d impiego Arresto a finecorsa I finecorsa di posizione con funzione di sicurezza della serie Z/T sono adatti per dispositivi di protezione che devono essere chiusi per garantire la necessaria sicurezza
Campo d impiego Arresto a finecorsa I finecorsa di posizione con funzione di sicurezza della serie Z/T sono adatti per dispositivi di protezione che devono essere chiusi per garantire la necessaria sicurezza
Laboratorio di Sistemi e Automazione (A020-C320) esperienza competenze Competenze trasversali
 esperienza competenze Competenze trasversali") DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
Distonie normative nella progettazione del vetro strutturale
 Distonie normative nella progettazione del vetro strutturale Laddove il progettista del vetro si scontra con il disordine di riferimenti normativi PhD - : progettista di vetro strutturale di Distonie normative
Distonie normative nella progettazione del vetro strutturale Laddove il progettista del vetro si scontra con il disordine di riferimenti normativi PhD - : progettista di vetro strutturale di Distonie normative
Trasmettitore di pressione per applicazioni industriali generiche Modello A-10
 Misura di pressione elettronica Trasmettitore di pressione per applicazioni industriali generiche Modello A-10 Scheda tecnica WIKA PE 81.60 Applicazioni Costruzione di macchine Macchine utensili Sistemi
Misura di pressione elettronica Trasmettitore di pressione per applicazioni industriali generiche Modello A-10 Scheda tecnica WIKA PE 81.60 Applicazioni Costruzione di macchine Macchine utensili Sistemi
Trasportatori. Multiparts Curvi. Membro del
 Trasportatori Multiparts Curvi Membro del Multiparts un introduzione Se siete alla ricerca di una consegna veloce di sistemi trasportatori di alta qualità, offerti direttamente da un catalogo standard,
Trasportatori Multiparts Curvi Membro del Multiparts un introduzione Se siete alla ricerca di una consegna veloce di sistemi trasportatori di alta qualità, offerti direttamente da un catalogo standard,
TORNI VERTICALI A DUE MONTANTI Mod. 1520, 1525, 1L532
 TORNI VERTICALI A DUE MONTANTI Mod. 15, 155, 1L5 M.I.R.M.U. Via Baldinucci, 4 158 Milano Tel.959 Fax.9954 info @mirmu.it 1 Le macchine sono destinate alle operazioni di sgrossatura e di finitura di pezzi
TORNI VERTICALI A DUE MONTANTI Mod. 15, 155, 1L5 M.I.R.M.U. Via Baldinucci, 4 158 Milano Tel.959 Fax.9954 info @mirmu.it 1 Le macchine sono destinate alle operazioni di sgrossatura e di finitura di pezzi
LAVORAZIONI INDUSTRIALI
 TORNITURA 1 LAVORAZIONI INDUSTRIALI Nelle lavorazioni industriali per asportazione di truciolo sono sempre presenti: Pezzo Grezzo Macchina Utensile Utensile Attrezzatura 2 1 TORNITURA 3 TORNITURA Obiettivo:
TORNITURA 1 LAVORAZIONI INDUSTRIALI Nelle lavorazioni industriali per asportazione di truciolo sono sempre presenti: Pezzo Grezzo Macchina Utensile Utensile Attrezzatura 2 1 TORNITURA 3 TORNITURA Obiettivo:
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
Cambio modello SBK PRODOTTO ATTUALMENTE NON DISPONIBILE PERCHè IN AGGIORNAMENTO
 Cambio modello SBK PRODOTTO ATTUALMENTE NON DISPONIBILE PERCHè IN AGGIORNAMENTO, 999, 998, 1098 Codice: NCR.CAMBIOSBK Prezzo al pubblico: Euro 2.197,00 + IVA Frizione antisaltellamento NCR CORSE Frizione
Cambio modello SBK PRODOTTO ATTUALMENTE NON DISPONIBILE PERCHè IN AGGIORNAMENTO, 999, 998, 1098 Codice: NCR.CAMBIOSBK Prezzo al pubblico: Euro 2.197,00 + IVA Frizione antisaltellamento NCR CORSE Frizione
Convenzioni di rappresentazione
 Convenzioni di rappresentazione Ogni elemento grafico su un elaborato deve avere un preciso ed inequivocabile significato, secondo le convenzioni di seguito illustrate. In particolare: Disegno tecnico:
Convenzioni di rappresentazione Ogni elemento grafico su un elaborato deve avere un preciso ed inequivocabile significato, secondo le convenzioni di seguito illustrate. In particolare: Disegno tecnico:
CASSETTE A PORTATA VARIABILE DOPPIO CONDOTTO
 GENERALITA' Generalità : Le cassette a portata variabile della serie sono elementi di regolazione della portata che consentono la miscelazione di aria primaria calda ed aria primaria fredda al fine di
GENERALITA' Generalità : Le cassette a portata variabile della serie sono elementi di regolazione della portata che consentono la miscelazione di aria primaria calda ed aria primaria fredda al fine di
WHY CIFA. Pompe Carrellate
 WHY CIFA Pompe Carrellate WHY CIFA POMPE CARRELLATE I sistemi di pompaggio calcestruzzo Cifa sono il frutto della lunga esperienza in tutte le applicazioni del calcestruzzo. Sono studiati e prodotti nella
WHY CIFA Pompe Carrellate WHY CIFA POMPE CARRELLATE I sistemi di pompaggio calcestruzzo Cifa sono il frutto della lunga esperienza in tutte le applicazioni del calcestruzzo. Sono studiati e prodotti nella
A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E.
 A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Caratteristiche
A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Caratteristiche
Corso di Formazione Pompaggio nei sistemi di fognatura Rimini, 5 novembre 2015
 Corso di Formazione Pompaggio nei sistemi di fognatura Rimini, 5 novembre 2015 Il colpo d ariete nelle condotte prementi per il trasposto di acque di fognatura Carlo Ciaponi Università degli Studi di Pavia
Corso di Formazione Pompaggio nei sistemi di fognatura Rimini, 5 novembre 2015 Il colpo d ariete nelle condotte prementi per il trasposto di acque di fognatura Carlo Ciaponi Università degli Studi di Pavia
Sistema antintrusione Vimar
 24 V 1 2 3 12 V 12 V 230 V 10 12 16887 PRI 230 V 50 Hz SEC 12-12 - 24 V 18-18 - 24 VA ta 25 C IP40 F Microfono SISTEMA ANTINTRUSIONE 32 Idea Sistema antintrusione Vimar Prodotti al microscopio di Francesco
24 V 1 2 3 12 V 12 V 230 V 10 12 16887 PRI 230 V 50 Hz SEC 12-12 - 24 V 18-18 - 24 VA ta 25 C IP40 F Microfono SISTEMA ANTINTRUSIONE 32 Idea Sistema antintrusione Vimar Prodotti al microscopio di Francesco
RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO
 Corsi di Laurea in: - Gestione tecnica del territorio agroforestale e Sviluppo rurale - Scienze forestali e ambientali - Costruzioni rurali e Topografia RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO 4. Il
Corsi di Laurea in: - Gestione tecnica del territorio agroforestale e Sviluppo rurale - Scienze forestali e ambientali - Costruzioni rurali e Topografia RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO 4. Il
Sistema di misurazione distanza ed anticollisione
 Sistema di misurazione distanza ed anticollisione LPR-1DP/2 LPR-1DP Area virtuale di stop Area virtuale di stop LPR-1DXi Regolatore e sensore di distanza semplice e veloce misurazione della posizione misurazione
Sistema di misurazione distanza ed anticollisione LPR-1DP/2 LPR-1DP Area virtuale di stop Area virtuale di stop LPR-1DXi Regolatore e sensore di distanza semplice e veloce misurazione della posizione misurazione
Fisica con gli smartphone. Lezioni d'autore di Claudio Cigognetti
 Fisica con gli smartphone Lezioni d'autore di Claudio Cigognetti VIDEO I SENSORI IN UNO SMARTPHONE Oggi la miniaturizzazione dei sensori indicati con l acronimo inglese MEMS (sistemi microelettronici e
Fisica con gli smartphone Lezioni d'autore di Claudio Cigognetti VIDEO I SENSORI IN UNO SMARTPHONE Oggi la miniaturizzazione dei sensori indicati con l acronimo inglese MEMS (sistemi microelettronici e
10 Ragioni. per scegliere Arcore
 Dal 2001, anno in cui un tornado ha colpito pesantemente lo stabilimento di Arcore, Tenaris ha investito complessivamente per la ricostruzione e per il miglioramento del processo produttivo e logistico
Dal 2001, anno in cui un tornado ha colpito pesantemente lo stabilimento di Arcore, Tenaris ha investito complessivamente per la ricostruzione e per il miglioramento del processo produttivo e logistico