Corso di Bioingegneria Informatica e Elettronica: Biomeccatronica
|
|
|
- Giordano Lillo
- 5 anni fa
- Visualizzazioni
Transcript
1 Corso di Bioingegneria Informatica e Elettronica: Biomeccatronica Laboratorio di Biomeccatronica Università degli Studi Magna Græcia di Catanzaro, ITALY carlo.cosentino@unicz.it

2 Chirurgia Mininvasiva Il chirurgo lavora con strumenti lunghi Attraverso piccole incisioni Usa il laparoscopio per avere un feedback visivo
3 Peculiarità della MIS Movimento della mano invertito Scalatura della velocità Perdita di gradi di libertà
4 Proprietà Ideali di un Sistema per MIRS (1/2) Feedback Tattile Strutture non visibili Feedback kinestetico Forze di presa/manipolazione Controllo Geometrico Corretta coordinazione mano-occhio Completa manipolabilità (6DoF) Estrema destrezza all interno del paziente Ridondanza cinematica Maggiore flessibilità di posizionamento in sala operatoria
5 Proprietà Ideali di un Sistema per MIRS (2/2) Funzioni di assistenza intelligente Riduzione del tempo operatorio Funzioni di sicurezza Minor rischio a fronte di sbagli Appropriato grado di immersione Interfaccia utilizzatore intuitiva Migliori risultati (dimostrabili oggettivamente) rispetto alla procedura MIS tradizionale Nuove tecniche di intervento



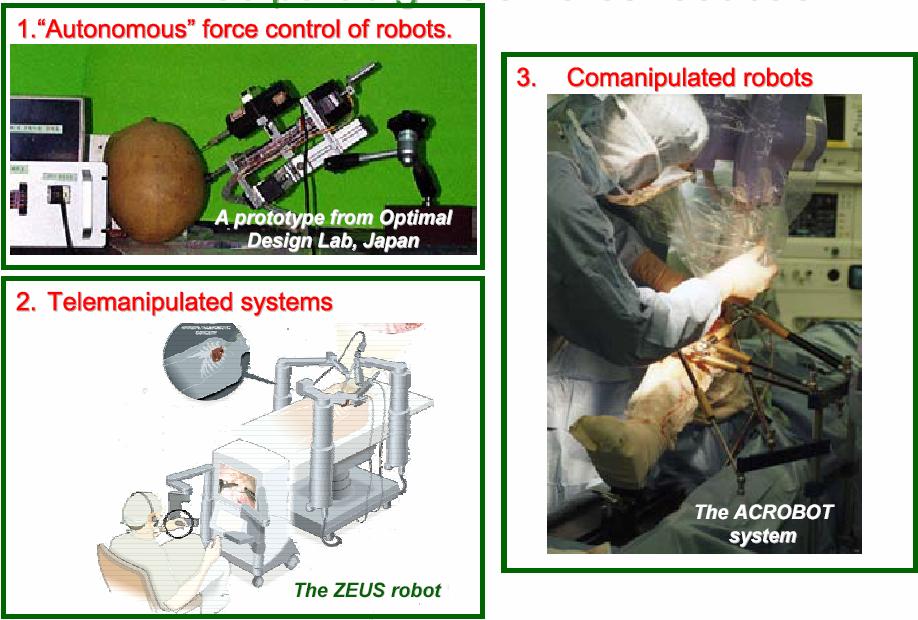
6 Computer Motion - Zeus
7 Computer Motion - Zeus Filmato Microwrist

8 Computer Motion - Zeus





9 Intuitive Surgical Da Vinci
10 FDA Clearances (da Vinci) Approvato dal FDA per le seguenti tipologie di intervento

11 Procedure Effettuate con il da Vinci

12 Operazione Lindbergh 27 Luglio 2001: primo intervento transatlantico di colecistectomia su modello animale (6 maiali operati a Strasburgo da chirurgo in remoto da New York).
13 Operazione Lindbergh: Obiettivi Definire limitazioni tecnologiche della tele-manipolazione a distanza Definire ritardi di trasmissione accettabili, che permettono di preservare la qualità, la precisione e la sicurezza dell intervento Sviluppo di interfacce per la trasmissione di audio-video in alta definizione
14 Vantaggi e Limiti della MIRS Ergonomia VANTAGGI Controllo vocale dell ottica (Zeus) Visione 3D (da Vinci) Destrezza intra-corporea Precisione: filtraggio del tremore, scalatura LIMITI No force feedback No cambio automatico degli strumenti Costo Ingombro Aspetti etici Non esiste una reale validazione del beneficio clinico rispetto alla laparoscopia!
15 Force-Feedback: Tre Paradigmi
16 Controllo di Posizione

17 Controllo di Forza Diretto

18 Controllo di Forza Indiretto

19 Controllo Ibrido di Posizione/Forza E possibile controllare alcuni gradi di libertà in posizione ed altri in forza

20 Esempio di Controllo Ibrido Controllo di un robot per prelievo tessuto cutaneo
21 Problematiche Principali Vantaggi Precisione nell esecuzione Compensazione di piccoli movimenti del paziente Sicurezza: limitazione delle forze applicate Principali Limitazioni Mancanza di destrezza: il controllo ibrido è realmente implementabile solo su traiettorie semplici Sicurezza: per dimostrare analiticamente la stabilità del sistema è necessario utilizzare modelli di contatto e leggi di controllo abbastanza conservative Costo/sterilizzazione degli strumenti sensorizzati Problemi tecnologici dei sensori di forza (bias, etc )
Corso di Bioingegneria Informatica e Elettronica: Biomeccatronica
 Corso di Bioingegneria Informatica e Elettronica: Biomeccatronica Laboratorio di Biomeccatronica Università degli Studi Magna Græcia di Catanzaro carlo.cosentino@unicz.it http://wpage.unina.it/carcosen
Corso di Bioingegneria Informatica e Elettronica: Biomeccatronica Laboratorio di Biomeccatronica Università degli Studi Magna Græcia di Catanzaro carlo.cosentino@unicz.it http://wpage.unina.it/carcosen
HI-TECH IN SANITA'. MINI-INVASIVITA' 2.0: nuove tecnologie al servizio dell'appropriatezza e della bioetica professionale
 HI-TECH IN SANITA'. MINI-INVASIVITA' 2.0: nuove tecnologie al servizio dell'appropriatezza e della bioetica professionale La Chirurgia Robot-Assistita Carlo Introini Responsabile Urologia OEI Genova 18
HI-TECH IN SANITA'. MINI-INVASIVITA' 2.0: nuove tecnologie al servizio dell'appropriatezza e della bioetica professionale La Chirurgia Robot-Assistita Carlo Introini Responsabile Urologia OEI Genova 18
IVANA NARDO. Inf. Specialista «Chirurgia robotica» Azienda USL Sud Est Presidio ospedaliero San Donato Arezzo NE PARLIAMO?
 IVANA NARDO. Inf. Specialista «Chirurgia robotica» Azienda USL Sud Est Presidio ospedaliero San Donato Arezzo NE PARLIAMO? Con gli anni, il sistema robotico ha subito considerevoli evoluzioni e una collaborazione
IVANA NARDO. Inf. Specialista «Chirurgia robotica» Azienda USL Sud Est Presidio ospedaliero San Donato Arezzo NE PARLIAMO? Con gli anni, il sistema robotico ha subito considerevoli evoluzioni e una collaborazione
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
Cosa si intende per Intelligent Assist Device. Assist Device o. Intelligent. Secondo la definizione fornita dalla Robotics Industry Association un
 Cosa si intende per Intelligent Assist Device Un Intelligent Assist Device è un manipolatore industriale intelligente. che permette all operatore di manipolare, con uno sforzo quasi nullo, qualsiasi oggetto
Cosa si intende per Intelligent Assist Device Un Intelligent Assist Device è un manipolatore industriale intelligente. che permette all operatore di manipolare, con uno sforzo quasi nullo, qualsiasi oggetto
università DEGLI STUDI DI NAPOLI FEDERICO II
 università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
Robot in contatto con l ambiente: Introduzione
 Corso di Robotica 2 Robot in contatto con l ambiente: Introduzione Prof. Alessandro De Luca A. De Luca Interazione robot-ambiente il robot può interagire con l ambiente modificando lo stato dell ambiente
Corso di Robotica 2 Robot in contatto con l ambiente: Introduzione Prof. Alessandro De Luca A. De Luca Interazione robot-ambiente il robot può interagire con l ambiente modificando lo stato dell ambiente
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE. Ing. Cristian Secchi Tel
 TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
Ing. Cristian Secchi Tel
 TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
PIATTAFORMA DI NAVIGAZIONE MULTIMODALE PER LA CHIRURGIA
 PIATTAFORMA DI NAVIGAZIONE MULTIMODALE PER LA CHIRURGIA Orion è un sistema di navigazione che sfrutta più modalità di imaging per consentire una navigazione intuitiva in chirurgia. Moduli software dedicati
PIATTAFORMA DI NAVIGAZIONE MULTIMODALE PER LA CHIRURGIA Orion è un sistema di navigazione che sfrutta più modalità di imaging per consentire una navigazione intuitiva in chirurgia. Moduli software dedicati
Intraoperative Safety Constraints Definition System for Robotic Minimally Invasive Surgery
 25 luglio 2018 Corso di Laurea Magistrale in Ingegneria Biomedica Intraoperative Safety Constraints Definition System for Robotic Minimally Invasive Surgery Luca Vantadori Supervisore Prof. Elena De Momi
25 luglio 2018 Corso di Laurea Magistrale in Ingegneria Biomedica Intraoperative Safety Constraints Definition System for Robotic Minimally Invasive Surgery Luca Vantadori Supervisore Prof. Elena De Momi
Tecnologie robotiche per la visione in chirurgia mini invasiva transluminale endoscopica
 Tecnologie robotiche per la visione in chirurgia mini invasiva transluminale endoscopica Pietro Cerveri (pietro.cerveri@polimi.it) Laboratorio NearLab Sezione di Robotica Medica Dipartimento di Bioingegneria
Tecnologie robotiche per la visione in chirurgia mini invasiva transluminale endoscopica Pietro Cerveri (pietro.cerveri@polimi.it) Laboratorio NearLab Sezione di Robotica Medica Dipartimento di Bioingegneria
Controllo dei Robot. Corso di Controllo dei Robot Unità di Governo. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Corso di Controllo dei Robot Unità di Governo Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Componenti di un sistema robotico Un sistema robotico è un sistema complesso rappresentato
Corso di Controllo dei Robot Unità di Governo Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Componenti di un sistema robotico Un sistema robotico è un sistema complesso rappresentato
Rappresentazioni in 3D. Vettori: rappresentano punti e/o segmenti orientati
 Rappresentazioni in 3D Leggere Cap. 2 del libro di testo Sistemi di riferimento Caratterizzano i corpi rigidi Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto
Rappresentazioni in 3D Leggere Cap. 2 del libro di testo Sistemi di riferimento Caratterizzano i corpi rigidi Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto
LOGISTICA E INDUSTRIA 4.0. Una trasformazione tecnologica finanziabile?
 LOGISTICA E INDUSTRIA 4.0 Una trasformazione tecnologica finanziabile? Il nuovo Piano del Governo è stato illustrato, in anticipo rispetto alla presentazione della Legge di Stabilità 2017, dal Ministero
LOGISTICA E INDUSTRIA 4.0 Una trasformazione tecnologica finanziabile? Il nuovo Piano del Governo è stato illustrato, in anticipo rispetto alla presentazione della Legge di Stabilità 2017, dal Ministero
Accessibilità ai dispositivi informatici
 Accessibilità ai dispositivi informatici Alberto Mingardi Tecnico Assistive Technology Informatica primi anni 60 1 Usabilità Marzo 1964 Tecnologia attuale e tendenze Grande diffusione dei sistemi portatili
Accessibilità ai dispositivi informatici Alberto Mingardi Tecnico Assistive Technology Informatica primi anni 60 1 Usabilità Marzo 1964 Tecnologia attuale e tendenze Grande diffusione dei sistemi portatili
Prof.ssa Cecilia Laschi
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Intelligent Devices for Handling INDEVA
 Intelligent Devices for Handling INDEVA INDEVA : l industria di fiducia per la creazione di soluzioni complete e su misura per il settore automobilistico L industria automobilistica è indubbiamente fra
Intelligent Devices for Handling INDEVA INDEVA : l industria di fiducia per la creazione di soluzioni complete e su misura per il settore automobilistico L industria automobilistica è indubbiamente fra
Stand, Step and Walk. Adattarsi al cambiamento
 Adattarsi al cambiamento company profile a circle spa e Motekforce Link B.V. muoviti nel futuro Motekforce Link ed i suoi partners DIH, Hocoma e MRS systems realizzano prodotti innovativi per la riabilitazione
Adattarsi al cambiamento company profile a circle spa e Motekforce Link B.V. muoviti nel futuro Motekforce Link ed i suoi partners DIH, Hocoma e MRS systems realizzano prodotti innovativi per la riabilitazione
Le funzioni del software presenti in tutte le versioni del programma. Tipologia di esami 2 PERCHÈ SCEGLIERE I.C.P.
 2 PERCHÈ SCEGLIERE I.C.P. 3 SCHEDA OPTOMETRICA Le funzioni del software presenti in tutte le versioni del programma RISULTATI TEST PARAMETRIZZATI Confronto tra immagini del database Il salvataggio di immagini
2 PERCHÈ SCEGLIERE I.C.P. 3 SCHEDA OPTOMETRICA Le funzioni del software presenti in tutte le versioni del programma RISULTATI TEST PARAMETRIZZATI Confronto tra immagini del database Il salvataggio di immagini
AUSILI per la comunicazione
 AUSILI per la comunicazione Ausili per interventi di Early Communication Tabelle di Comunicazione Comunicatori hardware Software di comunicazione su vari supporti informatici Comunicazione a distanza Ausili
AUSILI per la comunicazione Ausili per interventi di Early Communication Tabelle di Comunicazione Comunicatori hardware Software di comunicazione su vari supporti informatici Comunicazione a distanza Ausili
Velocità senza precedenti.
 Velocità senza precedenti. La rivoluzionaria tecnologia 3D-in-Motion permette al manipolo di Lava C.O.S. di acquisire in modo continuo circa 20 set di dati 3D al secondo. Manovrabilità. Dimensione reale
Velocità senza precedenti. La rivoluzionaria tecnologia 3D-in-Motion permette al manipolo di Lava C.O.S. di acquisire in modo continuo circa 20 set di dati 3D al secondo. Manovrabilità. Dimensione reale
Ausili per disabilità sensoriali
 Laurea Specialistica in Scienze Motorie Corso di Metodi e Didattiche dei sussidi per disabili a.a. 2006-2007 2007 Ausili per disabilità sensoriali ing. Renzo Andrich Centro di Bioingegneria Fondazione
Laurea Specialistica in Scienze Motorie Corso di Metodi e Didattiche dei sussidi per disabili a.a. 2006-2007 2007 Ausili per disabilità sensoriali ing. Renzo Andrich Centro di Bioingegneria Fondazione
ROBOTICA INDUSTRIALE PRIMO PERCORSO
 ROBOTICA INDUSTRIALE PRIMO PERCORSO ROB1 Manutenzione installazione programmazione dell interfacciamento di sistemi industriali robotizzati Prerequisiti Per accedere è richiesto un diploma d istituto tecnico
ROBOTICA INDUSTRIALE PRIMO PERCORSO ROB1 Manutenzione installazione programmazione dell interfacciamento di sistemi industriali robotizzati Prerequisiti Per accedere è richiesto un diploma d istituto tecnico
Le capacità motorie. Capacità coordinative: dipendono dal sistema nervoso.
 La coordinazione Le capacità motorie Capacità motorie: è l insieme delle caratteristiche fisiche o sportive che un individuo possiede e che permette l apprendimento e l esecuzione delle varie azioni motorie.
La coordinazione Le capacità motorie Capacità motorie: è l insieme delle caratteristiche fisiche o sportive che un individuo possiede e che permette l apprendimento e l esecuzione delle varie azioni motorie.
HUMAN FACTORS ENGINEERING AND PATIENT SAFETY in Operating Rooms
 HUMAN FACTORS ENGINEERING AND PATIENT SAFETY in Operating Rooms ANALISI SECONDO I PRINCIPI ERGONOMICI DELLA STRUMENTAZIONE E DELL ORGANIZZAZIONE DELLA SALA OPERATORIA francesco.ranzani@regione.toscana.it
HUMAN FACTORS ENGINEERING AND PATIENT SAFETY in Operating Rooms ANALISI SECONDO I PRINCIPI ERGONOMICI DELLA STRUMENTAZIONE E DELL ORGANIZZAZIONE DELLA SALA OPERATORIA francesco.ranzani@regione.toscana.it
Claudia Salatino: Ausili tecnologici per la comunicazione 19/03/2018
 CAPACITÀ RESIDUE AREA MOTORIA: limitazioni funzionali e risorse nella produzione del messaggio -> manipolazione e controllo operativo dell'ausilio AREA COGNITIVA: capacità di elaborazione del messaggio
CAPACITÀ RESIDUE AREA MOTORIA: limitazioni funzionali e risorse nella produzione del messaggio -> manipolazione e controllo operativo dell'ausilio AREA COGNITIVA: capacità di elaborazione del messaggio
trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico
 Problemi da risolvere navigazione trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico copertura passare un sensore o un attuatore su tutti i punti che
Problemi da risolvere navigazione trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico copertura passare un sensore o un attuatore su tutti i punti che
SENMATION AUTOMAZIONE INTELLIGENTE DEI SENSORI PER CMM INFORMAZIONI SUL PRODOTTO
 SENMATION AUTOMAZIONE INTELLIGENTE DEI SENSORI PER CMM INFORMAZIONI SUL PRODOTTO SENMATION SENMATION AUTOMAZIONE INTELLIGENTE DEI SENSORI Un sistema di misura che possa utilizzare diversi sensori, ma
SENMATION AUTOMAZIONE INTELLIGENTE DEI SENSORI PER CMM INFORMAZIONI SUL PRODOTTO SENMATION SENMATION AUTOMAZIONE INTELLIGENTE DEI SENSORI Un sistema di misura che possa utilizzare diversi sensori, ma
Leica Absolute Trackers
 INFORMAZIONI DI PRODOTTO Leica Absolute Trackers Soluzioni di misura Leica Absolute Tracker AT402 e B-Probe SISTEMA DI MISURA ENTRY-LEVEL ULTRA PORTATILE Il Leica B-Probe è un dispositivo di misura portatile
INFORMAZIONI DI PRODOTTO Leica Absolute Trackers Soluzioni di misura Leica Absolute Tracker AT402 e B-Probe SISTEMA DI MISURA ENTRY-LEVEL ULTRA PORTATILE Il Leica B-Probe è un dispositivo di misura portatile
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
NUOVE IDEE PER LA DIAGNOSTICA AVANZATA. DeltaScanPHR PROGETTO DIAGNOSTICA SCANNER FOSFORI
 NUOVE IDEE PER LA DIAGNOSTICA AVANZATA PROGETTO DIAGNOSTICA SCANNER FOSFORI Nuove idee per la diagnostica avanzata Nel percorso di scelta di un bene durevole ad alto contenuto tecnologico clinico, è necessario
NUOVE IDEE PER LA DIAGNOSTICA AVANZATA PROGETTO DIAGNOSTICA SCANNER FOSFORI Nuove idee per la diagnostica avanzata Nel percorso di scelta di un bene durevole ad alto contenuto tecnologico clinico, è necessario
Informazioni e Programma
 Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
IL REVAMPING LEGATO A INDUSTRIA 4.0
 IL REVAMPING LEGATO A INDUSTRIA 4.0 All interno della Legge di Bilancio 2017 sono state previste importanti agevolazioni per la cosiddetta Industria 4.0 Ministero dello Sviluppo Economico QUALI SONO I
IL REVAMPING LEGATO A INDUSTRIA 4.0 All interno della Legge di Bilancio 2017 sono state previste importanti agevolazioni per la cosiddetta Industria 4.0 Ministero dello Sviluppo Economico QUALI SONO I
COMUNE DI CREMA Area di Staff del Segretario Generale Ufficio Sistemi Informativi
 COMUNE DI CREMA Area di Staff del Segretario Generale Ufficio Sistemi Informativi Rivediamo il Centro Storico Introduzione Sul territorio del comune di Crema è presente un sistema di videosorveglianza
COMUNE DI CREMA Area di Staff del Segretario Generale Ufficio Sistemi Informativi Rivediamo il Centro Storico Introduzione Sul territorio del comune di Crema è presente un sistema di videosorveglianza
Corso di Laurea Specialistica in Informatica Università di Pisa
 Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Corso di Percezione Robotica (PRo) Prof.ssa Cecilia Laschi ARTS Lab Advanced Robotics Technology & Systems Laboratory Scuola Superiore Sant Anna, Pisa Corso di Laurea Specialistica in Informatica Università
Coreografie con droni e sviluppi tecnologici. Patrick Predella
 Coreografie con droni e sviluppi tecnologici Patrick Predella Il Drone Sistema Aeromobile a Pilotaggio Remoto Sostanzialmente piccolo Leggero Estremamente manovrabile Versatile Le sue capacità Sistemi
Coreografie con droni e sviluppi tecnologici Patrick Predella Il Drone Sistema Aeromobile a Pilotaggio Remoto Sostanzialmente piccolo Leggero Estremamente manovrabile Versatile Le sue capacità Sistemi
STAR, il sistema di tracking solare elio-referenziato. Alessandro Rossi Green City Energy Pisa, 2 luglio 2010
 STAR, il sistema di tracking solare elio-referenziato Alessandro Rossi Green City Energy Pisa, 2 luglio 2010 Outline Chi è Alitec Il progetto SCOOP Il fotovoltaico a concentrazione (CPV) Requisiti di puntamento
STAR, il sistema di tracking solare elio-referenziato Alessandro Rossi Green City Energy Pisa, 2 luglio 2010 Outline Chi è Alitec Il progetto SCOOP Il fotovoltaico a concentrazione (CPV) Requisiti di puntamento
Università degli Studi Magna Græcia di Catanzaro. Corso di Laurea in Biotecnologie. Sede Edificio delle Bioscienze, Campus "S.
 Università degli Studi Magna Græcia di Catanzaro Corso di Laurea in Biotecnologie Calendario Lezioni III Anno, I Sem., a.a. 2011/2012, aggiornato al 15/12 Sede dificio delle Bioscienze, Campus "S.Venuta"
Università degli Studi Magna Græcia di Catanzaro Corso di Laurea in Biotecnologie Calendario Lezioni III Anno, I Sem., a.a. 2011/2012, aggiornato al 15/12 Sede dificio delle Bioscienze, Campus "S.Venuta"
Rappresentazioni in 3D. Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati
 Rappresentazioni in 3D Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto scalare, prodotto
Rappresentazioni in 3D Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto scalare, prodotto
HUVITZ HS-5000 LAMPADA A FESSURA NOTATE LA DIFFERENZA ATTRAVERSO LA FESSURA HUVITZ UNA SOLUZIONE DIAGNOSTICA AVANZATA
 HUVITZ HS-5000 LAMPADA A FESSURA NOTATE LA DIFFERENZA ATTRAVERSO LA FESSURA HUVITZ UNA SOLUZIONE DIAGNOSTICA AVANZATA Una combinazione perfetta, l integrazione della lampada a fessura HS5000 con il sistema
HUVITZ HS-5000 LAMPADA A FESSURA NOTATE LA DIFFERENZA ATTRAVERSO LA FESSURA HUVITZ UNA SOLUZIONE DIAGNOSTICA AVANZATA Una combinazione perfetta, l integrazione della lampada a fessura HS5000 con il sistema
Industria 4.0. Enabling the future of manufacturing
 Enabling the future of manufacturing è la rivoluzione industriale che connette la macchina, intesa come bene singolo, al resto del contesto della linea di produzione, interagendo con scambio dati (es.
Enabling the future of manufacturing è la rivoluzione industriale che connette la macchina, intesa come bene singolo, al resto del contesto della linea di produzione, interagendo con scambio dati (es.
Sistema Industriale di Visione basato sull Intelligenza Artificiale
 Programmiamo innovazione e trasformiamo le idee in realtà. Sistema Industriale di Visione basato sull Intelligenza Artificiale AGS Advanced Global Solution Via Figino 20-20016 Pero - Italy info@ags-it.com
Programmiamo innovazione e trasformiamo le idee in realtà. Sistema Industriale di Visione basato sull Intelligenza Artificiale AGS Advanced Global Solution Via Figino 20-20016 Pero - Italy info@ags-it.com
SISTEMA RISPARMIO CARBURANTE
 SISTEMA RISPARMIO CARBURANTE + controllo veicoli e flotte aziendali www.risparmiocarburante.com L innovazione che migliora gli affari Oggi le maggiori spese delle aziende, che operano nel settore degli
SISTEMA RISPARMIO CARBURANTE + controllo veicoli e flotte aziendali www.risparmiocarburante.com L innovazione che migliora gli affari Oggi le maggiori spese delle aziende, che operano nel settore degli
SpaceMouse Enterprise CREATO PER PRESTAZIONI DI PROGETTAZIONE SENZA LIMITI
 Gamma di prodotti LA COMBINAZIONE PERFETTA DI UN POTENTE HARDWARE ERGONOMICO E INTELLIGENTE CON UN SOFTWARE FACILE DA USARE PER LAVORARE NEL CAD IN UN MODO VELOCE, COMODO E PIACEVOLE Linea di prodotti
Gamma di prodotti LA COMBINAZIONE PERFETTA DI UN POTENTE HARDWARE ERGONOMICO E INTELLIGENTE CON UN SOFTWARE FACILE DA USARE PER LAVORARE NEL CAD IN UN MODO VELOCE, COMODO E PIACEVOLE Linea di prodotti
CODESYS Softmotion come gestire un robot
 CODESYS Softmotion come gestire un robot CODESYS Users Conference 2017 Luca Strabla CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Componenti 2 Definizione robot 3 Programmazione 2 Componenti
CODESYS Softmotion come gestire un robot CODESYS Users Conference 2017 Luca Strabla CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Componenti 2 Definizione robot 3 Programmazione 2 Componenti
Fondamenti di Informatica
 e usabilità Cazzaniga Paolo Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it Outline La qualità del Web 1 La qualità del Web 2 3 Outline La qualità del Web 1 La qualità del Web 2 3 Modelli di qualità
e usabilità Cazzaniga Paolo Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it Outline La qualità del Web 1 La qualità del Web 2 3 Outline La qualità del Web 1 La qualità del Web 2 3 Modelli di qualità
Ospedale Niguarda. ASST Grande Ospedale Metropolitano
 Ospedale Niguarda ASST Grande Ospedale Metropolitano Chi siamo Niguarda è un ospedale di riferimento per Milano, per la Regione Lombardia e per l'italia. Niguarda ospita tutte le specialità per l'adulto
Ospedale Niguarda ASST Grande Ospedale Metropolitano Chi siamo Niguarda è un ospedale di riferimento per Milano, per la Regione Lombardia e per l'italia. Niguarda ospita tutte le specialità per l'adulto
Applied Intelligent Systems Laboratory (AIS-Lab)
") BergamoScienza 2007 Applied Intelligent Systems Laboratory (AIS-Lab) Dipartimento di Scienze dell Informazione Università degli Studi di Milano http://ais-lab.dsi.unimi.it 1/18 AIS-Lab: aree di ricerca
BergamoScienza 2007 Applied Intelligent Systems Laboratory (AIS-Lab) Dipartimento di Scienze dell Informazione Università degli Studi di Milano http://ais-lab.dsi.unimi.it 1/18 AIS-Lab: aree di ricerca
Livello 1. Il Concetto di SMARTERehab. La Valutazione Mirata
 Il Concetto di SMARTERehab ESERCIZI SPECIFICI DI CONTROLLO MOTORIO PER TRATTARE IL DOLORE MUSCOLOSCHELETRICO: VALUTAZIONE E RIABILITAZIONE Il concetto SMARTERehab con la sua metodologia di lavoro, basata
Il Concetto di SMARTERehab ESERCIZI SPECIFICI DI CONTROLLO MOTORIO PER TRATTARE IL DOLORE MUSCOLOSCHELETRICO: VALUTAZIONE E RIABILITAZIONE Il concetto SMARTERehab con la sua metodologia di lavoro, basata
Mercoledì 28 giugno 2006 ore 11,30 Aula Magna Padiglione Vigiola Ospedale San Paolo di Savona
 CARTELLA STAMPA Mercoledì 28 giugno 2006 ore 11,30 Aula Magna Padiglione Vigiola Ospedale San Paolo di Savona PRESENTAZIONE DEL ROBOT DA VINCI ALL OSPEDALE SAN PAOLO DI SAVONA La chirurgia laparoscopica
CARTELLA STAMPA Mercoledì 28 giugno 2006 ore 11,30 Aula Magna Padiglione Vigiola Ospedale San Paolo di Savona PRESENTAZIONE DEL ROBOT DA VINCI ALL OSPEDALE SAN PAOLO DI SAVONA La chirurgia laparoscopica
UNITÀ DI GOVERNO. Architettura funzionale. Ambiente di programmazione. Architettura hardware
 UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
Sistema di Video Sorveglianza
 powered by www.servizispeciali.it PERSONALIZZAZIONE DEGLI «EVENTI»: MOTION, TAMPERING, OSCURAMENTO VIDEOSORVEGLIARE I MEZZI CHE SONO IN MOBILITÀ REGISTRAZIONE DEGLI EVENTI IN LOCALE E REMOTO OpenEyeAutomotive
powered by www.servizispeciali.it PERSONALIZZAZIONE DEGLI «EVENTI»: MOTION, TAMPERING, OSCURAMENTO VIDEOSORVEGLIARE I MEZZI CHE SONO IN MOBILITÀ REGISTRAZIONE DEGLI EVENTI IN LOCALE E REMOTO OpenEyeAutomotive
Sistema Centrale di Comando e Controllo. TuDEM
 Sistema Centrale di Comando e Controllo Per TuDEM Sistema automatico di spegnimento per gallerie con monitori telecomandati Caccialanza & C., SpA Via Pacinotti 10 I-20090 Segrate / Milano (Italy) I_CTUDL.DOC
Sistema Centrale di Comando e Controllo Per TuDEM Sistema automatico di spegnimento per gallerie con monitori telecomandati Caccialanza & C., SpA Via Pacinotti 10 I-20090 Segrate / Milano (Italy) I_CTUDL.DOC
Comportamento dinamico di manipolatori interagenti con l'ambiente
 Dottorato in Meccanica Applicata XX Ciclo II anno di corso Comportamento dinamico di manipolatori interagenti con l'ambiente Dottorando: Nicola Pedrocchi Tutor: prof. Giovanni Legnani Progetto svolto in
Dottorato in Meccanica Applicata XX Ciclo II anno di corso Comportamento dinamico di manipolatori interagenti con l'ambiente Dottorando: Nicola Pedrocchi Tutor: prof. Giovanni Legnani Progetto svolto in
Sistema DANTE. Scheda prodotto SISTEMA DANTE
 PAG. 1 DI 11 SISTEMA DANTE Sistema professionale per l annotazione di eventi che consente raccolta, analisi, presentazione e gestione di dati osservati in tempo reale o su registrazione video. PAG. 2 DI
PAG. 1 DI 11 SISTEMA DANTE Sistema professionale per l annotazione di eventi che consente raccolta, analisi, presentazione e gestione di dati osservati in tempo reale o su registrazione video. PAG. 2 DI
Realtà virtuale e analisi del movimento. Muoviti nel futuro
 Realtà virtuale e analisi del movimento Muoviti nel futuro stable STAbility and Balance Learning Environment STABLE per la valutazione ed il trattamento dei disordini posturali e dell equilibrio in uno
Realtà virtuale e analisi del movimento Muoviti nel futuro stable STAbility and Balance Learning Environment STABLE per la valutazione ed il trattamento dei disordini posturali e dell equilibrio in uno
Soluzione Flessibile per la Misura
 Soluzione Flessibile per la Misura ad Alta Precisione OPTOFLASH Optoflash è la soluzione Marposs di ultima generazione per misure ottiche di precisione. Progettato per alberi di piccola taglia, viterie
Soluzione Flessibile per la Misura ad Alta Precisione OPTOFLASH Optoflash è la soluzione Marposs di ultima generazione per misure ottiche di precisione. Progettato per alberi di piccola taglia, viterie
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
PROGETTAZIONE E SVILUPPO DI APPLICAZIONI CON L AUSILIO DELLA REALTÀ AUMENTATA
 PROGETTAZIONE E SVILUPPO DI APPLICAZIONI CON L AUSILIO DELLA REALTÀ AUMENTATA Introduzione sulla realtà aumentata La realtà aumentata (dall inglese augmented reality) è una particolare estensione della
PROGETTAZIONE E SVILUPPO DI APPLICAZIONI CON L AUSILIO DELLA REALTÀ AUMENTATA Introduzione sulla realtà aumentata La realtà aumentata (dall inglese augmented reality) è una particolare estensione della
Il controllo posturale: il problema della stabilità
 Il controllo posturale: il problema della stabilità Pietro G. Morasso Università di Genova DIST Centro di Bioingegneria della Colletta Le problematiche La stabilizzazione del pendolo invertito umano in
Il controllo posturale: il problema della stabilità Pietro G. Morasso Università di Genova DIST Centro di Bioingegneria della Colletta Le problematiche La stabilizzazione del pendolo invertito umano in
Istituto Tecnico S. Bandini Siena. Corso Grafica e comunicazione. Anno Scolastico PROGRAMMA SVOLTO
 Istituto Tecnico S. Bandini Siena Corso Grafica e comunicazione Anno Scolastico 2016-17 PROGRAMMA SVOLTO Classe: 3 GRA MATERIA : PROGETTAZIONE MULTIMEDIALE DOCENTE: Prof. Giorgio Lorenzoni I.T.P. : Prof.
Istituto Tecnico S. Bandini Siena Corso Grafica e comunicazione Anno Scolastico 2016-17 PROGRAMMA SVOLTO Classe: 3 GRA MATERIA : PROGETTAZIONE MULTIMEDIALE DOCENTE: Prof. Giorgio Lorenzoni I.T.P. : Prof.
Un sistema di interazione uomo-robot per compiti di manipolazione mobile basato su realtà virtuale
 Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
TECNOLOGIE PER L INCLUSIONE: PROSPETTIVE E DIFFICOLTA
 TECNOLOGIE PER L INCLUSIONE: PROSPETTIVE E DIFFICOLTA Elena Laudanna 14 Maggio 2016 UNA SCUOLA PER TUTT: SI PUO SE C E QUEL NOI TECNOLOGIE PER L INCLUSIONE dispositivi DISPOSITIVI SPECIALI DISPOSITIVI
TECNOLOGIE PER L INCLUSIONE: PROSPETTIVE E DIFFICOLTA Elena Laudanna 14 Maggio 2016 UNA SCUOLA PER TUTT: SI PUO SE C E QUEL NOI TECNOLOGIE PER L INCLUSIONE dispositivi DISPOSITIVI SPECIALI DISPOSITIVI
PCP, Smart Cities, e Robotica
 PCP, Smart Cities, e Robotica Francesco Maurelli maurelli@in.tum.de Federica Pepponi pepponi@in.tum.de Webinar ANCI/Cittalia - IFEL 2016-05-23 1 Chi siamo? Francesco Maurelli Scientific Manager TUM PhD
PCP, Smart Cities, e Robotica Francesco Maurelli maurelli@in.tum.de Federica Pepponi pepponi@in.tum.de Webinar ANCI/Cittalia - IFEL 2016-05-23 1 Chi siamo? Francesco Maurelli Scientific Manager TUM PhD
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
ANNO SCOLASTICO: 2018/2019 OTTICA OTTICA APPLICATA PAOLO TRAVERSO KATIA CAPPELLI. Finalita
 ANNO SCOLASTICO: 2018/2019 MATERIA: INSEGNANTE: CLASSE: OTTICA OTTICA APPLICATA PAOLO TRAVERSO KATIA CAPPELLI 3^A ottico Finalita Finalita della disciplina sono in accordo con quelle riportate nel curriculum
ANNO SCOLASTICO: 2018/2019 MATERIA: INSEGNANTE: CLASSE: OTTICA OTTICA APPLICATA PAOLO TRAVERSO KATIA CAPPELLI 3^A ottico Finalita Finalita della disciplina sono in accordo con quelle riportate nel curriculum
STARLED7 NX. Lampada a LED per sala operatoria
 STARLED7 NX Lampada a LED per sala operatoria starled7 NX STARLED7 NX L evoluzione tecnologica a led in sala operatoria ACEM Medical Company (divisione di Acem S.p.A), sempre all avanguardia per l utilizzo
STARLED7 NX Lampada a LED per sala operatoria starled7 NX STARLED7 NX L evoluzione tecnologica a led in sala operatoria ACEM Medical Company (divisione di Acem S.p.A), sempre all avanguardia per l utilizzo
IMAGING INTRAORALE SECONDO LE TUE ESIGENZE. Radiografia intraorale
 IMAGING INTRAORALE SECONDO LE TUE ESIGENZE Radiografia intraorale FONA Radiografia intraorale IMAGING INTRAORALE SECONDO LE TUE ESIGENZE I dispositivi FONA per la radiografia intraorale sono progettati
IMAGING INTRAORALE SECONDO LE TUE ESIGENZE Radiografia intraorale FONA Radiografia intraorale IMAGING INTRAORALE SECONDO LE TUE ESIGENZE I dispositivi FONA per la radiografia intraorale sono progettati
La pratica. Imparare attraverso la pratica. La ripetizione di un movimento
 La pratica motoria La pratica Imparare attraverso la pratica La pratica, individua consolida ed immagazzina una alto numero di sitiuazioni inerenti al compito e le organizza in una forma di vocabolario
La pratica motoria La pratica Imparare attraverso la pratica La pratica, individua consolida ed immagazzina una alto numero di sitiuazioni inerenti al compito e le organizza in una forma di vocabolario
CORSO AVANZATO DI SEMEIOTICA STRUMENTALE. Giovanna Carnovale Scalzo
 CORSO AVANZATO DI SEMEIOTICA STRUMENTALE Giovanna Carnovale Scalzo Università degli Studi di Catanzaro Magna Græcia Dipartimento di Scienze Mediche e Chirurgiche Cattedra di Malattie dell Apparato Visivo
CORSO AVANZATO DI SEMEIOTICA STRUMENTALE Giovanna Carnovale Scalzo Università degli Studi di Catanzaro Magna Græcia Dipartimento di Scienze Mediche e Chirurgiche Cattedra di Malattie dell Apparato Visivo
Software di mappatura ultrasonora per componenti aeronautici e industriali
 Software di mappatura ultrasonora per componenti aeronautici e industriali "Il software sviluppato in LABVIEW tramite la scheda NI PCI 7358 controlla e muove i 6 assi, singolarmente o contemporaneamente,
Software di mappatura ultrasonora per componenti aeronautici e industriali "Il software sviluppato in LABVIEW tramite la scheda NI PCI 7358 controlla e muove i 6 assi, singolarmente o contemporaneamente,
S-HOW Motion. Misura, Previeni. Spalla
 S-HOW Motion Misura, Previeni Spalla Background Difficoltà di interpretazione del dolore negli infortuni alla spalla (il dolore è causa o conseguenza?) Necessità di migliorare la comunicazione inter-operatore
S-HOW Motion Misura, Previeni Spalla Background Difficoltà di interpretazione del dolore negli infortuni alla spalla (il dolore è causa o conseguenza?) Necessità di migliorare la comunicazione inter-operatore
La Riabilitazione in Realtà Virtuale
 La Riabilitazione in Realtà Virtuale D. Rimini Val della Torre 24-25 ottobre 2013 1/23 Indice Che cos è la Riabilitazione in Realtà Virtuale Principi neurologici Principi di funzionamento Vantaggi di un
La Riabilitazione in Realtà Virtuale D. Rimini Val della Torre 24-25 ottobre 2013 1/23 Indice Che cos è la Riabilitazione in Realtà Virtuale Principi neurologici Principi di funzionamento Vantaggi di un
Straumann CARES Intraoral Scanner. Cattura ogni nota.
 Straumann Informazioni CARES Intraoral sul prodotto Scanner Straumann CARES Intraoral Scanner Cattura ogni nota. UN FLUSSO DI LAVORO DIGITALE COMPLETAMENTE INTEGRATO E VALIDATO DALLA SCANSIONE ALLA FABBRICAZIONE.
Straumann Informazioni CARES Intraoral sul prodotto Scanner Straumann CARES Intraoral Scanner Cattura ogni nota. UN FLUSSO DI LAVORO DIGITALE COMPLETAMENTE INTEGRATO E VALIDATO DALLA SCANSIONE ALLA FABBRICAZIONE.
UNA FOTOTRAPPOLA CON I CONTRO SENSORI!
 UNA FOTOTRAPPOLA CON I CONTRO SENSORI! Cari amici di questa rubrica, ricorderete che diverse volte abbiamo trattato insieme l argomento foto-trappole, per capirci meglio, quelle piccole scatolette digitali
UNA FOTOTRAPPOLA CON I CONTRO SENSORI! Cari amici di questa rubrica, ricorderete che diverse volte abbiamo trattato insieme l argomento foto-trappole, per capirci meglio, quelle piccole scatolette digitali
T-300S Unità Integrata di telemetria GSM/GPRS dotata di pannello solare
 T-300S Unità Integrata di telemetria GSM/GPRS dotata di pannello solare Dispositivo autonomo di acquisizione dati, monitoraggio e automazione remoti provvisto di batterie ricaricabili e di pannello solare
T-300S Unità Integrata di telemetria GSM/GPRS dotata di pannello solare Dispositivo autonomo di acquisizione dati, monitoraggio e automazione remoti provvisto di batterie ricaricabili e di pannello solare
Università degli Studi di Ferrara Dipartimento di Architettura Corso di Laurea in Design del prodotto industriale A.A. 2016/2017
 Università degli Studi di Ferrara Dipartimento di Architettura Corso di Laurea in Design del prodotto industriale A.A. 2016/2017 Design di prodotto prof. Jacopo Piccione 8/05/2017 Il design del masochista
Università degli Studi di Ferrara Dipartimento di Architettura Corso di Laurea in Design del prodotto industriale A.A. 2016/2017 Design di prodotto prof. Jacopo Piccione 8/05/2017 Il design del masochista
L 'esperienza del passato, per le sfide future.
 WWW.REACTIVARPC.COM L 'esperienza del passato, per le sfide future. R.P.C. COSTRUTTORI DI CERTEZZE Un team di professionisti al servizio del cliente. Questa è la garanzia che R.P.C. Piegatrici offre ai
WWW.REACTIVARPC.COM L 'esperienza del passato, per le sfide future. R.P.C. COSTRUTTORI DI CERTEZZE Un team di professionisti al servizio del cliente. Questa è la garanzia che R.P.C. Piegatrici offre ai
L Utenza Debole: Tecnologie per la Riabilitazione e l Assistenza
 L Utenza Debole: Tecnologie per la Riabilitazione e l Assistenza Jorge Manzano Sezione Robotica - Unità Tecnico Scientifica Fusione ENEA I giovedì della Cultura Scientifica: Applicazioni e tecnologie dei
L Utenza Debole: Tecnologie per la Riabilitazione e l Assistenza Jorge Manzano Sezione Robotica - Unità Tecnico Scientifica Fusione ENEA I giovedì della Cultura Scientifica: Applicazioni e tecnologie dei
SISTEMA VALUTAZIONE FUNZIONALITÀ VISIVA
 CAPITOLATO TECNICO LOTTO N. 4 SISTEMA VALUTAZIONE FUNZIONALITÀ VISIVA Scheda tecnica, indicazione di base d asta, griglia di valutazione SCHEDA TECNICA Sistema per la valutazione della funzionalità visiva
CAPITOLATO TECNICO LOTTO N. 4 SISTEMA VALUTAZIONE FUNZIONALITÀ VISIVA Scheda tecnica, indicazione di base d asta, griglia di valutazione SCHEDA TECNICA Sistema per la valutazione della funzionalità visiva
LIM Competenze di sistema
 LIM Competenze di sistema Esperienza e passione Con molta passione e cura, ENGEL sviluppa soluzioni di sistema per la lavorazione di siliconi liquidi. La competenza acquisita negli ultimi 40 anni è tutta
LIM Competenze di sistema Esperienza e passione Con molta passione e cura, ENGEL sviluppa soluzioni di sistema per la lavorazione di siliconi liquidi. La competenza acquisita negli ultimi 40 anni è tutta
ECODIADE. Software per la gestione dei Centri di Raccolta. Ecodiade, il software che fa per tre
 ECODIADE Software per la gestione dei Centri di Raccolta Ecodiade, il software che fa per tre Software Ecodiade Il sistema ECODIADE è UN SOFTWARE specifico per la gestione dei Centri di Raccolta. Il sistema
ECODIADE Software per la gestione dei Centri di Raccolta Ecodiade, il software che fa per tre Software Ecodiade Il sistema ECODIADE è UN SOFTWARE specifico per la gestione dei Centri di Raccolta. Il sistema
GLOREHA ARIA IDROGENET SRL GLOREHA SINFONIA
 GLOREHA ARIA Gloreha Aria è un dispositivo terapeutico sensorizzato per il trattamento riabilitativo dell arto superiore. Programmi personalizzati stimolano il paziente a muovere il braccio, il polso e
GLOREHA ARIA Gloreha Aria è un dispositivo terapeutico sensorizzato per il trattamento riabilitativo dell arto superiore. Programmi personalizzati stimolano il paziente a muovere il braccio, il polso e
SVILUPPO DI METODOLOGIE INFORMATICHE PER IL REVERSE ENGINEERING DEL CORPO UMANO
 SVILUPPO DI METODOLOGIE INFORMATICHE PER IL REVERSE ENGINEERING DEL CORPO UMANO 1/20 A) Disegno di macchine con importante interfaccia con l uomo 2/20 A) Solidworks Add-in: Software in Commercio Modelli
SVILUPPO DI METODOLOGIE INFORMATICHE PER IL REVERSE ENGINEERING DEL CORPO UMANO 1/20 A) Disegno di macchine con importante interfaccia con l uomo 2/20 A) Solidworks Add-in: Software in Commercio Modelli
Automazione per lo stoccaggio ed il picking intelligente
 ICAM Roberto Bianco Automazione per lo stoccaggio ed il picking intelligente Dott. Roberto Bianco Presidente e CEO, ICAM srl Bari, 26 Gennaio 2016 TITOLO icamonline.eu PERCHÉ SCEGLIERE UN MAGAZZINO AUTOMATICO?
ICAM Roberto Bianco Automazione per lo stoccaggio ed il picking intelligente Dott. Roberto Bianco Presidente e CEO, ICAM srl Bari, 26 Gennaio 2016 TITOLO icamonline.eu PERCHÉ SCEGLIERE UN MAGAZZINO AUTOMATICO?
BROCHURE. RM-RoboCut3D-Stone MACCHINE CNC MACCHINE INDUSTRIALI IMPIANTI ROBOTIZZATI
 BROCHURE RM-RoboCut3D-Stone MACCHINE CNC MACCHINE INDUSTRIALI IMPIANTI ROBOTIZZATI RM-ROBOCUT3D - Stone Impianto robotizzato per la fresatura 3D www.ronchinimassimo.com IMPIANTO ROBOTIZZATO PER LA SCULTURA
BROCHURE RM-RoboCut3D-Stone MACCHINE CNC MACCHINE INDUSTRIALI IMPIANTI ROBOTIZZATI RM-ROBOCUT3D - Stone Impianto robotizzato per la fresatura 3D www.ronchinimassimo.com IMPIANTO ROBOTIZZATO PER LA SCULTURA
Istituto Comprensivo di Cologna Veneta Curricolo Scuola Primaria
 Traguardi per lo sviluppo delle competenze al termine della scuola primaria L alunno utilizza le conoscenze e le abilità relative al linguaggio visivo per produrre varie tipologie di testi visivi (espressivi,
Traguardi per lo sviluppo delle competenze al termine della scuola primaria L alunno utilizza le conoscenze e le abilità relative al linguaggio visivo per produrre varie tipologie di testi visivi (espressivi,
Commissione per l'ambiente, la sanità pubblica e la sicurezza alimentare PROGETTO DI PARERE
 Parlamento europeo 2014-2019 Commissione per l'ambiente, la sanità pubblica e la sicurezza alimentare 14.7.2016 2015/2103(INI) PROGETTO DI PARERE della commissione per l'ambiente, la sanità pubblica e
Parlamento europeo 2014-2019 Commissione per l'ambiente, la sanità pubblica e la sicurezza alimentare 14.7.2016 2015/2103(INI) PROGETTO DI PARERE della commissione per l'ambiente, la sanità pubblica e
I joysticks miniaturizzati e le manopole per il controllo remoto hanno ottenuto qualifiche internazionali, e sono costruiti in accordo a specifiche.
 INDEX / SOMMARIO 1. INTRODUCING SO.GE.IN / PRESENTAZIONE SO.GE.IN... 3 2. MINIATURE JOYSTICKS / JOYSTICKS MINIATURIZZATI... 4 3. MINIATURE JOYSTICK MODELS / MODELLI JOYSTICK MINIATURIZZATI... 5 3.1. EB215
INDEX / SOMMARIO 1. INTRODUCING SO.GE.IN / PRESENTAZIONE SO.GE.IN... 3 2. MINIATURE JOYSTICKS / JOYSTICKS MINIATURIZZATI... 4 3. MINIATURE JOYSTICK MODELS / MODELLI JOYSTICK MINIATURIZZATI... 5 3.1. EB215
L'ultimo modello del Robot Da Vinci sbarca alla Città della Salute e della Scienza di Torino
 Torino, 21 luglio 2015 L'ultimo modello del Robot Da Vinci sbarca alla Città della Salute e della Scienza di Torino La Città della Salute e della Scienza di Torino acquisisce l'ultimo modello di Robot
Torino, 21 luglio 2015 L'ultimo modello del Robot Da Vinci sbarca alla Città della Salute e della Scienza di Torino La Città della Salute e della Scienza di Torino acquisisce l'ultimo modello di Robot
Funzioni evolute e facili da utilizzare per raggiungere il comfort climatico ideale. Anche integrate nella domotica.
 1/2/2016 VIMAR gestione del clima Clima & Energy Gestione del clima per ogni tipo di impianto Home Gestione del clima Gestione dell'energia Guida alla scelta Prodotti e istruzioni Gestione del clima Funzioni
1/2/2016 VIMAR gestione del clima Clima & Energy Gestione del clima per ogni tipo di impianto Home Gestione del clima Gestione dell'energia Guida alla scelta Prodotti e istruzioni Gestione del clima Funzioni
Gamma di prodotti. Valore BF
 Gamma di prodotti LA COMBINAZIONE PERFETTA DI UN POTENTE HARDWARE ERGONOMICO E INTELLIGENTE CON UN SOFTWARE FACILE DA USARE PER LAVORARE NEL CAD IN UN MODO VELOCE, COMODO E PIACEVOLE Linea di prodotti
Gamma di prodotti LA COMBINAZIONE PERFETTA DI UN POTENTE HARDWARE ERGONOMICO E INTELLIGENTE CON UN SOFTWARE FACILE DA USARE PER LAVORARE NEL CAD IN UN MODO VELOCE, COMODO E PIACEVOLE Linea di prodotti
OPPORTUNITA Macchine utensili per la lavorazione delle superfici Macchine per la movimentazione industriale, logistica, AGV, magazzini ecc.
 La legge di bilancio n232 del 11 Dicembre 2016 ha confermato l ammortamento al 140% per i beni strumentali e ha introdotto il super-ammortamento al 250% per gli interventi nell ambito dell automazione
La legge di bilancio n232 del 11 Dicembre 2016 ha confermato l ammortamento al 140% per i beni strumentali e ha introdotto il super-ammortamento al 250% per gli interventi nell ambito dell automazione