PROGETTI CON ARDUINO UNO
|
|
|
- Ilaria Valeri
- 8 anni fa
- Visualizzazioni
Transcript
1 PROGETTI CON ARDUINO UNO -Introduzione alla scheda Arduino- sistemisds.altervista.org Gennaio Sergio De Sordi

2 Dispositivo interattivo sensori Arduino attuatori Comportamento software Il progetto Arduino è nato nel 2005 in Italia presso l'interaction Design Institute di Ivrea con l'intento di fornire agli studenti uno strumento semplice ed economico di prototipazione elettronica. La scheda e il software di sviluppo sono nati con licenza open source. Arduino è un progetto in continua evoluzione.


3 Arduino UNO

4 Il microcontrollore utilizzato è una ATMEGA 328 a 16 MHz Memoria flash 32 Kbyte Memoria sram 2 Kbyte 32 registri a 8 bit uso generale

5 ALTRE SCHEDE ARDUINO ARDUINO MEGA ATMEGA Mhz 54 I/O digitali 16 analogici

6 ALTRE SCHEDE ARDUINO ARDUINO LEONARDO ATMEGA 32U4 16 Mhz USB e seriale separati ARDUINO DUE 32 bit ARM 84 MHz ARDUINO YUN ATMEGA 32U4 come Ard. LEONARDO 16 Mhz + ATHEROS Mhz con LINUX e WiFi

7 Il microcontrollore utilizzato è una ATMEGA 328 a 16 MHz Memoria flash 32 KByte Nel processore è memorizzato un piccolo programma di boot che serve a caricare nella memoria flash del microcontrollore lo sketch creato con l'ambiente di sviluppo su Pc, IDE. Il processore è di tipo RISC e una istruzione macchina viene eseguita mediamente in un solo ciclo di clock. L'architettura è di tipo Harvard con canali di comunicazione dati e istruzioni separati.

8

9 6 ingressi analogici 14 I/O digitali (6 pwm)

10 Con l'ambiente di sviluppo IDE si scrivono i programmi chiamati sketch (schizzo) Come visualizzare uno sketch di esempio denominato blink


11 Ci sono due funzioni: setup che viene eseguita una sola volta e loop che è un ciclo infinito. pinmode(pin,output-input) digitalwrite(pin,high-low) delay(millisec)
")
12 Avviato l'ide e collegata la scheda di Arduino è necessario selezionare il tipo di scheda e la connessione seriale da utilizzare. Quando la scheda Arduino viene connessa al pc nasce una porta virtuale seriale. La connessione seriale può essere utilizzata anche da programma per una comunicazione tra Arduino e Pc. Serial.begin(9600); Serial.print(dato); Serial.read();

13 Il linguaggio usato è un C C++ con alcune funzioni specifiche. Alcune funzioni pinmode(pin, mode); // imposta il pin in INPUT o OUTPUT digitalread(pin); // legge un ingresso digitale digitalwrite(pin, value) analogread(pin); delay(millisec) // invia HIGH o LOW al pin di uscita // legge da un ingresso analogico // ritardo
; delay(millisec) // invia HIGH o LOW al pin di uscita // legge da")
14 Costanti e variabili Le variabili appartengono alle locazioni di memoria RAM che al cessare dell'alimentazione perdono il loro contenuto. boolean true false char un carattere ASCII. Un byte in memoria byte memorizza un intero da 0 a 255 int numero intero da a Due byte unsigned int numero da 0 a long memorizza un numero tra e float numero in virgola mobile, 7 cifre dopo il punto decimale. In memoria 4 byte double virgola mobile doppia precisione

15 Costanti e variabili Per creare un array: int nome_variabile[3] ; crea tre variabili adiacenti di tipo intero char nome_variabile[8] = Arduino ; crea una stringa di 7 caratteri più un carattere terminatore. 8 byte da 0 a 7 Modo veloce per definire il contenuto di un array: int nome_variabile[]= {0, 25, 50, 100, 200;

16 Le variabili nel linguaggio di programmazione C++ che usa Arduino hanno una proprietà di visibilità denominata scope. Una variabile globale è visibile da ogni funzione del programma. Le variabili locali sono visibili soltanto all'interno della funzione nella quale esse sono dichiarate. Nell'ambiente Arduino qualsiasi variabile dichiarata fuori di una funzione ( per es. setup(), loop(), etc. ) è una variabile globale. Le variabili locali sono un modo utile per assicurare che soltanto all'interno di quella funzione si ha accesso alle proprie variabili. Questo previene errori di programmazione quando una funzione inavvertitamente modifica variabili usate da un'altra funzione. E' anche comodo dichiarare e inizializzare una variabile all'interno di un ciclo. Questo crea una variabile accessibile solo all'interno di un ciclo for. for( int k=0;k<10;k++) {...

17 Funzioni e parametri All'interno di una funzione sono visibili le variabili globali l passaggio dei parametri può avvenire per valore o per riferimento int x; int y; void swap() { int temp; temp=x; x=y; y=temp; globali locale void swapr(int &val1, int &val2) { int temp; temp=val1; val1=val2; val2=temp; /* in questo caso la funzione modifica due valori utilizzo: swapr(x,y)*/ int moltiplica(int a, int b) { return a*b; per riferimento per valore
*/ int moltiplica(int a, int b) { return a*b; per riferimento")
18 Istruzioni di controllo condizione if else while if (variabile == 55) { while(livello < 512) { digitalwrite(ledrosso, HIGH); livello=analogread(a0); digitalwrite(3,1); else digitalwrite(3,0); for for(int i=0; i< 10; i++) { Serial.println( Salve ); do while do { delay(50); x = analogread(a1); // while (x < 100); condizione
; do while do { delay(50); x = analogread(a1); // while (x <")
19 Istruzioni di controllo break switch case break è usata per uscire da do, for, o while, bypassando la condizione normale del ciclo. switch (var) { case 1: //esegui quando var==1 break; case 2: //esegui quando var==2 break; default: // esegui il default // default è opzionale while (true) { if(digitalread(5)==0) break;
")
20 Accendere e spegnere led Problema Si vuole che il proprio sketch accenda e spenga tre diodi led in modo da simulare il funzionamento di un semaforo.


21
22 Utilizzare un pulsante Problema Si vuole che il proprio sketch risponda accendendo un diodo led quando viene chiuso un contatto elettrico, per esempio quando si utilizza un pulsante a pressione.
23 /* un pulsante collegato al pin 2 accende un led collegato al pin 13 */ const int ledpin = 13; const int inputpin = 2; void setup(){ pinmode(ledpin, OUTPUT); pinmode (inputpin, INPUT); void loop() { int val=digitalread(inputpin); if (val== HIGH) { digitalwrite(ledpin, HIGH); else { digitalwrite(ledpin,low);
24 Riconoscere la pressione del pulsante Problema Si vuole che lo sketch agisca su un led in uscita solo in corrispondenza del cambiamento di stato del pulsante. Soluzione Si utilizza una variabile per memorizzare lo stato e agire solo quando questo valore cambia.
25 int buttonstate = 0; int lastbtnstate = LOW; // stato precedente del pulsante void loop() { buttonstate= digitalread(buttonpin); if (buttonstate!= lastbtnstate) { if (buttonstate == HIGH) { digitalwrite(ledpin, HIGH); else { digitalwrite(ledpin, LOW); lastbtnstate= buttonstate;
26 Riconoscere la pressione del pulsante per cambiare lo stato del led in uscita. Problema Si vuole che lo sketch agisca in uscita in modo che il led si illumini ad una prima pressione del tasto e resti acceso spegnendosi alla pressione successiva. Soluzione Lo sketch precedente, grazie alle funzioni if nidificate, è in grado di distinguere la pressione ( rising edge) dal rilascio (falling edge) del pulsante. Per fare in modo che il led resti acceso al rilascio del pulsante reagiremo solo sul rising edge. 1 0
27 const int buttonpin = 2;const int ledpin = 13; void loop() { int buttonstate = 0; int lastbtnstate = LOW; int ledstate= LOW; buttonstate= digitalread(buttonpin); if (buttonstate!= lastbtnstate && buttonstate == HIGH) { ledstate =! ledstate; if (ledstate== HIGH) { void setup() { digitalwrite(ledpin, HIGH); pinmode(ledpin, OUTPUT); pinmode(buttonpin, INPUT); else { digitalwrite(ledpin, LOW); lastbtnstate= buttonstate;
28 Una complicazione: il debounce di un pulsante. Problema Realizzando lo sketch precedente ci siamo imbattuti in una complicazione non banale, il led si accende o si spegne quando non dovrebbe. Il problema è dovuto ai falsi contatti del pulsante durante la sua pressione o al suo rilascio, fenomeno che ha una durata di qualche decina di millisecondi. Soluzione Usare tecniche di debaunce, la più semplice consiste nell'aggiungere un ritardo dopo l'esecuzione del codice legato alla pressione del tasto. Pressione HIGH LOW Schema semplificato del fenomeno Rilascio
29 const int buttonpin = 2; const int ledpin = 13; void loop() { buttonstate= digitalread(buttonpin); const int debauncedelay = 50; if (buttonstate!= lastbtnstate && buttonstate == HIGH) { int buttonstate = 0; ledstate =! ledstate; int lastbtnstate = LOW; if (ledstate== HIGH) { int ledstate= LOW; digitalwrite(ledpin, HIGH); void setup() { else { pinmode(ledpin, OUTPUT); digitalwrite(ledpin, LOW); pinmode(buttonpin, INPUT); lastbtnstate= buttonstate; delay(debauncedelay);
30 Simulazione semaforo con due funzioni normale e lampeggiante Problema Si vuole che il semaforo realizzato con tre led passi dal funzionamento normale a quello con giallo lampeggiante premendo un pulsante e viceversa. Soluzione E' opportuno utilizzare due funzioni una per il funzionamento normale e l'altra per quello a lampeggio. Una variabile di stato determina quale delle due utilizzare. Il pulsante premuto determina il cambiamento della variabile di stato.
31
32 const int verde=2; const int giallo=3; const int rosso=4; const int ingresso=10; boolean lampeggio=false; void setup() { pinmode(verde,output); pinmode(giallo,output); pinmode(rosso,output); pinmode(ingresso,input); digitalwrite(ingresso,high); // attivazione pull up // in alternativa pinmode(ingresso, INPUT_PULLUP);
33 void normale(){ digitalwrite(rosso,low); digitalwrite(verde,high); digitalwrite(giallo,low); delay(4000); digitalwrite(giallo,high); digitalwrite(verde,low); delay(1000); digitalwrite(giallo,low); digitalwrite(rosso,high); delay(4000); void giallol() { digitalwrite(verde,low); digitalwrite(rosso,low); digitalwrite(giallo,high); delay(500); digitalwrite(giallo,low); delay(500);
34 void loop() { if(lampeggio==false) normale(); else giallol(); if (digitalread(ingresso)==0) lampeggio=!lampeggio; /* in questo modo la modifica al funzionamento può essere effettuata solo alla fine di una sequenza di lampeggio */
35 void loop() { if(lampeggio==false) normale(); else giallol(); if (digitalread(ingresso)==0) lampeggio=!lampeggio; /* in questo modo la modifica al funzionamento può essere effettuata solo alla fine di una sequenza di lampeggio */
36 Sostituzione della delay per avere una risposta immediata void attendileggiinput(int attesa) { long attuale=millis(); while(millis() < (attuale+attesa)) { lettura=digitalread(ingresso); if (lettura==low){ while(! digitalread(ingresso)); // attende finchè resta basso delay(200); // rimbalzo al rilascio lampeggio=! lampeggio; break; // esce dalla while
37 Utilizzo di attendileggiinput void giallol() { digitalwrite(giallo,high); digitalwrite(verde,low); digitalwrite(rosso,low); //delay(1000); attendileggiinput(1000); if (! lampeggio) return; digitalwrite(giallo,low); digitalwrite(verde,low); digitalwrite(rosso,low); //delay(1000); attendileggiinput(1000); sostituita termina la funzione giallo sostituita
38 Leggere un ingresso analogico e comunicarlo in seriale Problema Si vuole rilevare un input analogico, input da 0 a 5 Volt. Il convertitore ADC del microcontrollore lo converte in un numero intero da 0 a Tale numero verrà inviato in seriale al Pc. Soluzione La lettura da input analogici viene effettuata con analogread(a0-a5) Per la comunicazione seriale si utilizza Serial.begin(9600) per inizializzare la comunicazione a 9600 bps e Serial.print(valore) per inviare un valore numerico sotto forma di caratteri codificati in ASCII al Pc. Se il dato fosse l'intero 123 i byte inviati sarebbero corrispondenti ai codici ASCII rispettivamente di 1,2,3 La lettura sul Pc può essere eseguita sfruttando il Monitor seriale dell'ide o con un programma specifico.
39
40
41 Leggere più di 6 input analogici Problema Si devono rilevare più input analogici di quanti pin analogici si abbiano a disposizione. Le schede Arduino standard sono dotate di sei input analogici (le Mega di 16) e in alcuni casi gli input analogici non sono sufficienti per la propria applicazione. Per esempio, nella propria applicazione si può aver bisogno di regolare otto parametri girando le manopole di otto potenziometri. Soluzione Per selezionare e collegare diverse sorgenti di voltaggi su un solo input analogico, si deve utilizzare un chip multiplexer. Selezionando diverse sorgenti in modo sequenziale, si riesce a leggere una alla volta. Nell'esempio si utilizza il diffuso chip 4051, che si collega ad Arduino come mostrato in figura.
42
43 /* legge 8 valori analogici attraverso un unico pin di input analogico */ void setup() { const int select[ ] = { 2,3,4; for (int bit=0; bit < 3;bit++) const int analogpin =0; // pin analogico collegato all'output del multiplexer pinmode(select[bit], OUTPUT); Serial.begin(9600); // la funzione restituisce il valore analogico di un canale int getvalue(int channel) void loop() { { // stampa i valori di ciascun canale una volta al secondo // imposta i bit del selettore in modo che corrispondano al valore binario del canale for (int channel=0; channel <8; channel++) for (int bit=0;bit <3; bit++) { int value = getvalue(channel); { int pin=select[bit]; Serial.print("Canale "); int isbitset = bitread(channel,bit); Serial.print(channel); digitalwrite(pin, isbitset); Serial.print(" = "); return analogread(analogpin); Serial.print(value); Delay(1000);
44 / Realizzare uno sketch con processing in modo che riceva dati seriali da Arduino Problema Si vuole utilizzare l'ambiente di sviluppo di Processing per ricevere in seriale da Arduino un valore corrispondente alla posizione di un potenziometro. La posizione viene utilizzata per simulare l'inclinazione di un aereo visto di coda. Soluzione Lo sketch su Arduino invia ogni 300 ms un valore da 0 a 250 contenuto in un byte in base alla rotazione di un potenziometro collegato all'ingresso analogico A0.

45

46 255 y x 450 pixel
47 /** Il programma viene associato ad uno sketch su arduino che invia la posizione di un potenziometro, tramite lettura analogica. */ import processing.serial.*; Serial serial2; int data[]= new int[4]; int x1=10; int y1=100; int x2=440; int y2=100; int inbyte; void setup() { size(450, 255); background(0); // nero stroke(0); serial2 = new Serial(this, Serial.list()[2], 9600); print(serial.list()[2]); void draw() { stroke(255); background(0); delay(200); // ritardo necessario fill(0,255,255); ellipse(220,100,50,50);/* cerchio r=50 */ line(220,100,220,30); //coda x=220 if (serial2.available() > 0) inbyte = serial2.read(); data[0]=x1; data[2]=x2; data[1]=y1+(inbyte-125); data[3]=y2-(inbyte-125); /* Disegna la linea con le coordinate ricevute. Se inbyte= 125 rimane orizzontale */ stroke(0,255,255); line(data[0], data[1], data[2], data[3]); //ali
48 Carica di un condensatore. Problema Un condensatore di capacità C, collegato alla tensione V0 mediante una resistenza R, si carica secondo la legge esponenziale: t V =V 0 ( 1 e RC ) Il prodotto RC viene detto costante di tempo e dà un stima della velocità di carica del condensatore. Dopo un tempo t=rc il condensatore si è caricato di circa il 63% (1-1/e)del valore massimo. Si vuole verificare sperimentalmente la legge. Soluzione Lo sketch su arduino, dopo aver dato tensione al circuito, una resistenza e un condensatore collegati in serie, misura la tensione ai capi del condensatore in istanti successivi per un certo numero di volte, comunica i dati di tensione e di tempo ad uno sketch di processing che li visualizza su di un grafico.
49 R = 100 Kohm C = 100 nf RC= 0,01 s
![#define NumMax 420 const int pincarica =2; const int led=13; long inizio; unsigned int tempo[nummax]; int lettura[nummax]; void setup() { Serial.](/docs-images/19/206781/images/50-0.png "begin(9600); pinmode(pincarica,output); pinmode(led,output); // invio dati in seriale for(int k=0;k<nummax;k++) { Serial.print(lettura[k]); Serial.print(' '); Serial.print(tempo[k]/10); Serial.")
50 #define NumMax 420 const int pincarica =2; const int led=13; long inizio; unsigned int tempo[nummax]; int lettura[nummax]; void setup() { Serial.begin(9600); pinmode(pincarica,output); pinmode(led,output); // invio dati in seriale for(int k=0;k<nummax;k++) { Serial.print(lettura[k]); Serial.print(' '); Serial.print(tempo[k]/10); Serial.print(' '); Serial.print('*'); digitalwrite(led,low); // fine segnalazione delay(10000); void loop() { digitalwrite(pincarica, LOW); // scarica condensatore delay(1000); digitalwrite(led,high); // segnalazione digitalwrite(pincarica,high); // inizio carica inizio=micros(); for (int k=0;k<nummax;k++) { tempo[k]=micros()- inizio; lettura[k]=analogread(a0); // 113 us R=120 Kohm C=100 nf
51 import processing.serial.*; String mystring = null; boolean fine=false; // The serial port: Serial myport; void setup() { size(400,300); myport = new Serial(this, Serial.list() [2], 9600); void draw() { stroke(0,0,255); line(1,299,399,299); line(1,299,1,1); fill(0); // nero text("45 ms", 350,270); if (fine) { print(mystring); fine=false; int[] dati= int(split(mystring,char(0x20))); stroke(255,0,0); int x= 0; int y= 299; if(dati!= null) { for(int k=0;k<dati.length-1;k=k+2){ int x1=dati[k+1]/10; int y1=299-(dati[k]*299/1023); line(x,y,x1,y1); x=x1; y=y1; mystring=""; void serialevent(serial myport) { char carattere=myport.readchar(); mystring=mystring+carattere; if(carattere=='*') fine=true;
52 Leggere un tastierino a matrice Problema Si vuole rilevare la pressione dei tasti di un tastierino a matrice righe, colonne come quello dei telefoni. Soluzione Si devono collegare le 4 righe e le 3 colonne del connettore del tastierino rispettivamente a 4 ingressi e a 3 uscite digitali di Arduino come in figura. Quando viene pigiato un tasto, viene messa in comunicazione una colonna con una riga. In figura per semplicità è indicato un solo tasto.
53 Discussione Le tastiere a matrice sono di solito costituite da pulsanti normalmente aperti che, quando vengono premuti, collegano una riga a un colonna. La funzione getkey imposta in sequenza su LOW i pin per ciscuna colonna e poi controlla se i pin di alcune righe sono LOW. Dato che si utilizzano delle resistenze di pull-up le righe saranno HIGH a meno che non si chiuda un pulsante. const char keymap[4][3]= { {'1', '2', '3', {'4', '5', '6', {'7', '8', '9', {'*', '0', '#' ; int numcar=0; int offset=0; int temptime=0; int time; const int rowpins[4]={8,9,10,13; const int colpins[3]= {0,6,7;
54 char getkey() { char key=0; for(int column=0;column<3;column++) { digitalwrite(colpins[column],low); for(int row=0;row<4; row++) { if(digitalread(rowpins[row])==low) { delay(20); while(digitalread(rowpins[row])== LOW); key= keymap[row][column]; digitalwrite(colpins[column],high); return key;
55 void setup() { Serial.begin(9600); for (int row=0;row<4;row++) { pinmode(rowpins[row],input); digitalwrite(rowpins[row],high); //attiva pull-up for (int column=0;column<3;column++) { pinmode(colpins[column],output); digitalwrite(colpins[column],high); //colonne tutte inattive void loop() { char key=getkey(); if(key!= 0) { Serial.println(key);
56 Contatti da sx: colonne ( la prima è 1,4,7,*) righe (la prima è 1,2,3,A) La quarta colonna non è utilizzata.
57 Utilizzare display Collegare e utilizzare un display LCD alfanumerico Problema Si vuole utilizzare un LCD alfanumerico basato sul controller HD44780 di Hitachi o un chip compatibile e si vogliono visualizzare valori alfanumerici. Soluzione Il software di Arduino include la libreria LiquidCrystal, che serve a gestire i dispositivi LCD basati sul chip HD44780.
58 Pin del display LCD Funzione Pin di Arduino 1 GND o Vss GND 2 +5V o Vdd +5V 3 contrasto Da 0 a +5V 4 RS 12 5 R/W GND 6 E 11 7 D0 8 D1 9 D2 10 D3 11 D D D D retroilluminazione 16 GND retroilluminazione
59
60 #include <LiquidCrystal.h> LiquidCrystal lcd(12,11,5,4,3,2); // RS E D4 D5 D6 D7 void setup() { lcd.begin(16,2); void loop() { for( int numero=0; numero <256; numero++) { if (numero==0) { lcd.clear(); lcd.print("numero: "); lcd.setcursor(9,0); lcd.print(numero); delay(200);
61 Collegare e utilizzare display a 7 segmenti Problema Si vogliono utilizzare dei display a 7 segmenti per visualizzare dei numeri. Soluzione Un display a 7 segmenti ha la piedinatura che si vede in figura. Se il display è a catodo comune questo andrà collegato a massa attraverso una resistenza. Gli altri pin denominati a,b,c,d.e, f,g possono essere collegati come nello schema seguente.
62 Display Pin abcdef g Nell'esempio che segue viene utilizzato un unico display. Il catodo comune del display non è collegato a massa ma al pin 10 della scheda Arduino. Tale pin viene dichiarato in output e attivato al valore LOW.
63 const int segmentpins[7]={4,5,7,8,9,3,2; // a b c d e f g const int catodo =10; // segmentpin[0] a const int attivazione[10]={0b ,0b ,0b , 0b ,0b ,0b ,0b ,0b ,0b ,0b ; // 0gfedcba void setup() { for (int i=0;i<8;i++) pinmode(segmentpins[i],output); pinmode(catodo,output); digitalwrite(catodo,low); // abilitazione del display void loop() { // cifre da 0 a 9 in sequenza for (int numero=0; numero<10;numero++) { showdigit(numero); delay(1000);
64 void showdigit(int number) { boolean isbitset; // abilitazione digit for (int segment=0; segment<7; segment++) { isbitset=bitread(attivazione[number],segment); digitalwrite(segmentpins[segment],isbitset);
65 Se i display sono più di uno si può utilizzare la tecnica del multiplexing. Tutti i sette pin a,b.c,d,e,f,g dei display sono collegati in parallelo mentre i catodi comuni sono attivati da altri pin di Arduino. L'attivazione avviene con valore logico 0 e viene fatta ciclicamente per i vari display. La cosa importante è che i display vengano attivati tutti in un tempo totale di circa 20 ms. In questo modo, per la persistenza della visione, l'impressione è che tutti i display siano accesi contemporaneamente. Quando si attiva un display viene inviata ai suoi led la configurazione binaria opportuna, per visualizzare la cifra numerica.
66 const int segmentpins[7]={4,5,7,8,9,3,2; // a b c d e f g const int digitpins[3]={10,11,12; const int numerale[10]={0b ,0b ,0b , 0b ,0b ,0b ,0b ,0b ,0b ,0b ; void setup() { for (int i=0;i<8;i++) pinmode(segmentpins[i],output); for (int i=10;i<13;i++) pinmode(i,output); for(int i=0;i<3;i++) digitalwrite(digitpins[i],high);
67 void loop() { int numero=analogread(a0); numero=map(numero,0,1023,0,999); for(int k=0;k<50;k++) shownumber(numero); // il ciclo for viene eseguito in 7*3*50 =1050 ms
68 // richiama 3 volte la showdigit void shownumber(int number) { if (number==0) showdigit(0,2); // showdigit( cifra, display) else{ for(int digit=2; digit >=0; digit--) { if (number>0){ showdigit(number%10,digit); number=number/10;
69 // ritarda 7 millisecondi void showdigit(int number,int digit) { boolean isbitset; // abilitazione digit digitalwrite(digitpins[digit],low); for (int segment=0; segment<7; segment++) { isbitset=bitread(numerale[number],segment); digitalwrite(segmentpins[segment],isbitset); delay(7); digitalwrite(digitpins[digit],high);
70 Utilizzare una comunicazione seriale per pilotare un display a 7 segmenti Problema Si vuole controllare un display a 7 segmenti inviando i dati con una comunicazione seriale sincrona. Soluzione Si utilizza uno shift register come 74HC595 e la funzione shiftout per inviare 8 bit in modo seriale sincrono (con clock). In questo modo si utilizzano solo 3 pin digitali di Arduino, uno per i bit inviati in serie, uno per il clock e uno per l'abilitazione dell'uscita verso il display quando il dato (byte) è pronto
71 int latchpin = 5; //Pin connected to ST_CP of 74HC595 invio in uscita int clockpin = 7; //Pin connected to SH_CP of 74HC595 clock int datapin = 6; //Pin connected to DS of 74HC595 dati const int cifra[16]= //0gfedcba {0b ,0b ,0b ,0b ,0b ,0b ,0b ,0b , 0b ,0b ,0b ,0b ,0b ,0b ,0b ,0b ; void setup() { pinmode(latchpin, OUTPUT); //set pins to output pinmode(clockpin, OUTPUT); pinmode(datapin, OUTPUT); void loop() { for(int k=0;k<16;k++) { //ground latchpin and hold low for as long as you are transmitting digitalwrite(latchpin, LOW); shiftout(datapin, clockpin, MSBFIRST,cifra[k]); /* per lo zero si invia dal più significativo al termine dello shift sull'uscita q0 del 74HC595 ci sarà il bit meno significativo, in questo caso 1*/ digitalwrite(latchpin, HIGH); delay(1000);

72 Collegamento in cascata di shift register 74HC595 Ingresso bit
73 Accensione dei led come supercar void loop() { for (int j = 1; j < 65536; j=j*2) { digitalwrite(latchpin, LOW); shiftout(datapin, clockpin, MSBFIRST, (j>>8)); // invio 8 bit alti shiftout(datapin,clockpin,msbfirst,j); // invio 8 bit bassi digitalwrite(latchpin, HIGH); delay(30); for (int j = 32768; j >0 ; j=j/2) { digitalwrite(latchpin, LOW); shiftout(datapin, clockpin, MSBFIRST, (j>>8)); shiftout(datapin, clockpin, MSBFIRST, j); digitalwrite(latchpin, HIGH); delay(30);
74 Utilizzare come display uno strumento analogico Problema Si vuole controllare la lancetta di uno strumento analogico dallo sketch. Le letture variabili sono più facili da interpretare con strumenti analogici. Soluzione Utilizzo di pwm. Per un misuratore da 1 ma fondo scala si utilizza una resistenza da 5K ohm
75 const in analogpin= 0; const int analogmeterpin =9; int sensorvalue =0; int outputvalue=0; void setup() { void loop() { sensorvalue= analogread(analogpin); outputvalue=map(sensorvalue,0,1023,0,255); analogwrite(analogmeterpin, outputvalue);
76 La funzione analogwrite(pin,0-255) utilizza una tecnica detta PWM (Pulse Width Modulation). Il segnale PWM opera variando la proporzione dei tempi di on e di off degli impulsi. T analogwrite(pin,127) ; //50% del duty cycle Il periodo è di 1 ms. Su Arduino i pin che possono essere utilizzati per l'output analogico sono il 3, 5,6, 9, 10 e 11.
77 SENSORI DI TEMPERATURA LM35 produce un voltaggio analogico direttamente proporzionale alla temperatura con un output di 10 millivolt per grado. Il termistore NTC da 10 K ohm a 25 varia la sua resistenza con la temperatura. Con istruzioni di Arduino voltaggio=(5.0*valoreletto)/1023; termistore= ((10000*5.0)/voltaggio)-10000); temp= (4100.0/log(termistore/ ); // la costante 4100 dipende dal termistore = e^ (-4100/( ))
78 Sensori di temperatura
79 Un sensore alternativo per misurare la temperatura è l'lm335. L'output dell'lm335 è pari a 10mV per grado Kelvin e quindi 0 celsius producono 2,731 volt. Per impostare la corrente di impiego è necessaria una resistenza da 1 K ohm. int value= analogread(inpin); float millivolts= (value/ )*5000; float celsius= (millivolts/10) ;
80 SENSORI DI PROSSIMITA' A INFRAROSSI
81 SENSORI DI PROSSIMITA' A INFRAROSSI Il sensore fornisce in uscita una tensione che varia in funzione della distanza dell'ostacolo rilevato. Si utilizza una analogread(a0)
82 Rispondere a un telecomando ad infrarossi Problema Si vuole rispondere alla pressione di un tasto qualsiasi sul telecomando di un televisore o altro. Soluzione Si utilizza un dispositivo modulo ricevitore IR che ha al suo interno un amplificatore e un filtro a 38 Khz per renderlo immune alla radiazione infrarossa ambientale. 1 Output 2 +5V 3 Gnd TSOP
83 // il led sul pin 13 si accende o si spegne ogni volta // che si preme un tasto #include <IRremote.h> // libreria da includere const int RECV_PIN = 11; // output è collegato al pin 11 const int ledpin = 13; IRrecv irrecv(recv_pin); decode_results results; void setup() { pinmode(ledpin,output); irrecv.enableirin(); // Start oggetto ricevitore boolean lightstate = false; unsigned long last= millis(); void loop() { if (irrecv.decode(&results)== true) { if( millis() -last >250) { // se sono trascorsi almeno 250 ms lightstate =! lightstate; digitalwrite(ledpin, lightstate); // cambia stato last=millis(); irrecv.resume(); // Riceve il prossimo valore
84 Utilizzo di un misuratore di distanza ad ultrasuoni Fornendo un impulso positivo della durata di 10 µs al pin di ingresso Trigger, il sensore genera un treno d'impulsi (otto) ad ultrasuoni a 40 khz, questi impulsi vengono inviati, tramite la capsula trasmittente, verso l'ostacolo, la capsula ricevente rileva l'eco sul pin di uscita Echo, dove sarà presente un impulso di durata da 150 µs (2 cm) a 25 ms (4,5 m) proporzionale alla distanza dell'oggetto. Se non rileva alcun ostacolo entro i 4,5 m, produce un impulso di durata di circa 38 ms. La formula per calcolare la distanza in cm è: impulso in µs diviso 58.
85 const int trig=2; // uscita per inviare un impulso al sonar const int echo=3; // ingresso per leggere l'eco void setup() { pinmode(trig,output); pinmode(echo,input); Serial.begin(9600); void loop() { Serial.print(distanza()); Serial.println(" cm"); delay(2000); int distanza(){ long duration; digitalwrite(trig,low); delaymicroseconds(5); digitalwrite(trig,high); delaymicroseconds(10); // creazione di un impulso di 10 us digitalwrite(trig,low); duration=pulsein(echo,high,20000); // rileva il tempo di ritorno dell'eco return (int) duration/58; // velocità del suono 340 m/s 0,034 cm/us 29 us/cm Timeout in microsecondi opzionale
86 L'output fisico Controllare un motore in corrente continua Problema Si vuole controllare la velocità di rotazione di un motore in c.c. attraverso una uscita PWM (Pulse Wide Modulation) Soluzione Si utilizza la funzione analogwrite(pin, 0-255) per regolare il pwm. Lo sketch seguente riceve un carattere da 0 a 9 dalla porta seriale e lo converte nel range da 0 a 255 per comandare il motore.
87 e c
88 const int motorpin = 3; void setup() { Serial.begin(9600); void loop() { if (Serial.available()) { char ch= Serial.Read(); if(isdigit(ch) // ch è un numero? { int speed=map(ch,'0','9',0,255); analogwrite(motorpin,speed); Serial.println(speed); else { Serial.println( Carattere inaspettato ); Serial.println(ch);
89 Controllare la rotazione di due motori in c.c. con un ponte ad H. Problema Si vuole controllare la direzione di rotazione di due motori in c.c. Tale problema è tipico del controllo dei motori di un robot autonomo. Soluzione I ponti ad H sono in grado di controllare i motori a spazzole. Si può utilizzare un L293D H-Bridge IC che può controllare due motori in c.c. Si può utilizzare anche l'sn754410, che presenta la stessa disposizione dei pin.
90
91 const int m1pin1 =5; const int m1pin2 =4; const int m2pin1 =3; const int m2pin2 =2; void setup() { pinmode(m1pin1,output); pinmode(m1pin2,output); pinmode(m2pin1,output); pinmode(m2pin2,output); void loop() { avanti(2000); fermo(); indietro(2000); void avanti(int tempo) { digitalwrite(m1pin1,low); digitalwrite(m1pin2,high); digitalwrite(m2pin1,low); digitalwrite(m2pin2,high); delay(tempo); void indietro(int tempo) { digitalwrite(m1pin1,high); digitalwrite(m1pin2,low); digitalwrite(m2pin1,high); digitalwrite(m2pin2,low); delay(tempo); void fermo() { digitalwrite(m1pin1,low); digitalwrite(m1pin2,low); digitalwrite(m2pin1,low); digitalwrite(m2pin2,low); delay(100);
92 Controllare la posizione di un servomotore Problema Si vuole controllare la posizione di un servomotore posizionandolo da 0 a 180. Utilizzando un sensore di luce che ruota con il servomotore si vuole che questo si sposti nella posizione di masssima luce. Soluzione Si utilizza una fotoresistenza fissata sul servomotore, si fa ruotare il servomotore da 0 a 180 a passi di un grado e si aggiorna man mano il valore di luce massimo misurato dalla fotoresistenza aggiornando nel contempo l'angolo corrispondente. Alla fine si riporta il servomotore nella posizione corrispondente all'angolo di luce massima. Il servomotore si posiziona a seconda della durata degli impulsi che riveve: 1 ms corrisponde a 0, 2 ms a 180. La durata degli impulsi dipende dal tipo di servomotore.
93
94 #include <Servo.h> Servo servox; int letturamin=1024; // la luce fa diminuire il valore della fotoresistenza e la lettura int angolomax=0; void setup() { servox.attach(9,1600,1900); //tra 1,6 ms e 2 ms (usare pin 9 o 10) servox.write(90); delay(100); void loop() { for(int angolo=20; angolo<=180;angolo=angolo++) { servox.write(angolo); delay(30); int lettura=analogread(a0); if (letturamin> lettura) { letturamin=lettura; angolomax=angolo; servox.write(angolomax); delay(20); angolomax=0; letturamin=1024; delay(5000);
95 Controllare la rotazione di un motore passo passo (stepper motor) Problema Si vuole controllare la rotazione di un motore passo passo unipolare utilizzando gli output digitali. I motori passo passo si distinguono in due categorie, bipolari e unipolari. Quelli unipolari prevedono 4 avvolgimenti da alimentare in sequenza uno alla volta in senso orario o antiorario per generare la rotazione. Sono caratterizzati da 5 o 6 fili a seconda che gli avvolgimenti siano collegati ad un nodo comune o a due a due con due nodi. Soluzione Ogni volta che si alimenta un avvolgimento dello statore, togliendo alimentazione agli altri, il motore gira di un passo, per esempio 1,8 in quanto il rotore, magnetizzato nord sud, si orienta sul campo magnetico. Per alimentare i 4 avvolgimenti dello statore si può utilizzare un darlington arrays come un ULN2003.
96
97 const int fase[4]= {0b0001,0b0010,0b0100,0b1000; const int pin[4]= {2,3,4,5; void setup() { pinmode(2,output); pinmode(3,output); pinmode(4,output); pinmode(5,output); void loop() { giraor(100); delay(500); giraan(100); delay(2000);
98 void giraor(int numpassi) { // numpassix4 for(int passi=0;passi< numpassi;passi++) { for (int j=0;j<4;j++) { // per le 4 fasi for(int k=0;k<4;k++){ // per i 4 bit digitalwrite(pin[k],bitread(fase[j],k)); delay(3); // ritardo di passo for(int k=0;k<4;k++) // togli alimentazione digitalwrite(pin[k],low); void giraan(int numpassi) { // numpassix4 for(int passi=0;passi< numpassi;passi++) { for (int j=3;j>=0;j--) { for(int k=0;k<4;k++){ digitalwrite(pin[k],bitread(fase[j],k)); delay(3); for(int k=0;k<4;k++) // togli alimentazione digitalwrite(pin[k],low);
99 L'output audio Un suono è prodotto dalla vibrazione dell'aria. Il segnale elettrico viene convertito in segnale acustico, vibrazioni dell'aria, da un altoparlante o da un dispositivo piezoelettrico. L'intervallo dei suoni udibili dagli esseri umani oscilla tra 20 Hz (cicli o periodi al secondo) e Hz. Il software di Arduino per produrre del suono include la funzione tone tone(pin, frequenza in Hz, durata in ms)
100 const int uscita =2; const int la4=440; // do re mi fa sol la si do 12 semitoni, 1 tra mi-fa e si-do const int si4=440*pow(2,(2.0/12)); // 440 Herz x 2^(semitoni/12) const int do5 =440*pow(2,(3.0/12)); const int re5=440*pow(2,(5.0/12)); const int sib4=440*pow(2,(1.0/12)); const int sol4=440*pow(2,-(2.0/12)); const int tuscendi[]={do5,do5,re5,do5,sib4,sib4,la4,la4,sol4,la4,sib4,do5,do5,sib4,la4,sol4; void setup() { pinmode(uscita,output); void loop() { for(int k=0;k<sizeof(tuscendi)/sizeof(int);k++){ tone(uscita,tuscendi[k],750); delay(750); delay(3000); (pin, frequenza in Hz, durata in ms)
101 Comunicare utilizzando I2C Introduzione I due collegamenti del bus I2C si chiamano SCL e SDA. Sulle schede Arduino standard sono disponibili utilizzando il pin analogico 5 per SCL, che offre il segnale di clock, e il pin analogico 4 per SDA che serve per trasferire i dati. Un dispositivo sul bus I2C funziona da dispositivo master. La sua funzione è coordinare il trasferimento delle informazioni con gli altri dispositivi slave.
102 Utilizzare un port expander I2C Problema Si vogliono utilizzare più porte di quante me fornisca la propria scheda. Soluzione Si utilizza un port expander esterno, come PCF8574A, che è dotato di 8 pin di input/output che possono essere controllati usando I2C.
103 Gli ingressi A0-A2 servono per stabilire l'indirizzo del dispositivo. Collegandoli a massa l'indirizzo è 0x38 e arriva fino a 0x3F. La libreria da includere è Wire.h e i medodi sono: Wire.begin(); Wire.beginTransmission(address); Wire.write(numero); Wire.endTransmission(); #include <Wire.h> const int address = 0x38; int numero; void setup() { Wire.begin(); void loop() { for( numero=0; numero <256; numero++) { Wire.beginTransmission(address); Wire.write(numero ^ 0xFF); // si accendono dei led in logica negata Wire.endTransmission(); delay(200);
104 Utilizzare l'hardware del controller Gli interrupt Gli interrupt sono segnali che obbligano il processore ad interrompere il flusso normale di uno sketch per gestire una operazione che richiede un'attenzione immediata, prima di continuare quello che stava facendo. Arduino utilizza gli interrupt per gestire i dati che provengono dalla porta seriale, per tenere il tempo nelle funzioni delay e millis e per lanciare una funzione con attachinterrupt. Arduino gestisce un interrupt alla volta. Il codice che gestisce un interrupt, detto interrupt service routine, dovrebbe essere breve, per evitare che gli altri interrupt vengano gestiti con un ritardo eccessivo. La funzione attachinterrupt(0,analyze,change) collega all'interrupt 0, che si riferisce al pin 2, la funzione analyze che viene eseguita quando sul pin 2 avviene un cambiamento di stato. Altre possibilità sono LOW, RISING, FALLING. L'interrupt 1 si riferisce al pin 3 con le stesse modalità.
105 Utilizzare gli interrupt sui pin 2 e 3 Problema Si vuole contare il numero di impulsi inviati all'ingresso del pin 2. Soluzione Si utilizza un pin digitale in OUTPUT per inviare al'ingresso del pin 2 un treno di impulsi. Il solo collegamento da fare è di connettere con un filo il pin 2 con il pin 9, scelto come sorgente di impulsi. Lo sketch è un formato da un ciclo che invia verso il pin 9 una segnalazione HIGH, LOW intervallata da 100 microsecondi per un certo numero di volte. Ad ogni transizione HIGH LOW sul pin 2 viene generato un interrupt. La funzione collegata all'interrupt incrementa ad ogni attivazione un contatore. Alla fine del ciclo si può risalire alla frequenza del treno di impulsi dividendo il conteggio per la durata del ciclo.
106 const int pin=9; int count = 0; void setup() { Serial.begin(9600); pinmode(pin,output); pinmode(2, INPUT); attachinterrupt(0,conta,falling); void conta() { count++; // funzione attivata da interrupt
107 void loop() { count=0; long int time1=micros(); for(int k=0;k<1000;k++){ digitalwrite(pin,high); delaymicroseconds(100); // circa 5000 Hz digitalwrite(pin,low); delaymicroseconds(100); long int time2= micros(); Serial.print( * count/(time2-time1)); Serial.println(" Hz "); delay(2000);
108 Interrupt dal timer1 // è necessario aggiungere la libreria TimerOne #include <TimerOne.h> void setup() { // Initialize the digital pin as an output. // Pin 13 has an LED connected on most Arduino boards pinmode(13, OUTPUT); Timer1.initialize(100000); // set a timer of length microseconds (or 0.1 sec - or 10Hz => the led will blink 5 times, 5 cycles of on-and-off, per second) Timer1.attachInterrupt( timerisr ); // attach the service routine here void loop() { // Main code loop // ISR Timer Routine void timerisr() { // Toggle LED digitalwrite( 13, digitalread( 13 ) ^ 1 );
109 Controllare una matrice di led utilizzando il multiplexing e l'interrupt del timer Soluzione Nello sketch si utilizza una matrice di led composta da 35 led (7 righe x 5 colonne). Ci sono matrici di led di dimensione 8x8 come in figura. Gli anodi sono collegati alle righe, i catodi alle colonne. Per accendere un led la colonna corrispondente deve essere collegata a massa con resistenza da 220 ohm mentre viene contemporaneamente attivata la riga.
110 Sono previste cinque diverse schermate che verranno visualizzate in sequenza. La libreria TimerOne permette di utilizzare gli interrupt del timer1. #include <TimerOne.h> // non può essere attivala la seriale! per via del pin 1 const int columnpins[]={2,3,4,5,1; const int rowpins[]= {15,16,17,18,19,6,7; // A1 A2 A3 A4 A5 6 7 quattro pin di norma analogici sono utilizzati come digitali int schermo[7][5]; const int ritardo=200; const int schermata0[7][5]={ {0,0,0,0,0,{0,0,0,0,0,{0,0,0,0,0,{0,0,0,0,0,{0,0,0,0,0, {0,0,0,0,0,{0,0,0,0,0; const int schermata1[7][5]={ {0,0,0,0,0,{0,0,0,0,0,{0,0,0,0,0,{0,0,1,0,0,{0,0,0,0,0, {0,0,0,0,0,{0,0,0,0,0; const int schermata2[7][5]={ {0,0,0,0,0,{0,0,0,0,0,{0,1,1,1,0,{0,1,0,1,0,{0,1,1,1,0, {0,0,0,0,0,{0,0,0,0,0; const int schermata3[7][5]={ {0,0,0,0,0,{0,1,1,1,0,{0,1,0,1,0,{0,1,0,1,0,{0,1,0,1,0, {0,1,1,1,0,{0,0,0,0,0; const int schermata4[7][5]={ {1,1,1,1,1,{1,0,0,0,1,{1,0,0,0,1,{1,0,0,0,1,{1,0,0,0,1, {1,0,0,0,1,{1,1,1,1,1; int colonna=0; int colonnaprec=0;
111 void setup() { for(int i=0;i<7;i++) pinmode(rowpins[i],output); for(int i=0;i<5;i++){ pinmode(columnpins[i],output); digitalwrite(columnpins[i],high); Timer1.initialize(4000); // ogni 4 ms Timer1.attachInterrupt(visCol); void viscol(){ // richiamata ogni 4 ms dall'interupt del timer digitalwrite(columnpins[colonnaprec],high); // disattiva la precedente colonna for(int k=0;k<7;k++) digitalwrite(rowpins[k],schermo[k][colonna]); // invio dati colonna digitalwrite(columnpins[colonna],low); // attiva la colonna colonnaprec=colonna; colonna=((colonna+1) % 5);
112 void loop() { for(int j=0;j<7;j++) for(int k=0;k<5;k++) schermo[j][k]=schermata0[j][k]; delay(ritardo); // 200 ms for(int j=0;j<7;j++) for(int k=0;k<5;k++) schermo[j][k]=schermata1[j][k]; delay(ritardo); for(int j=0;j<7;j++) for(int k=0;k<5;k++) schermo[j][k]=schermata2[j][k]; delay(ritardo); for(int j=0;j<7;j++) for(int k=0;k<5;k++) schermo[j][k]=schermata3[j][k]; delay(ritardo); for(int j=0;j<7;j++) for(int k=0;k<5;k++) schermo[j][k]=schermata4[j][k]; delay(ritardo);
113 Impostare rapidamente i pin digitali Problema Gestire i pin digitali più velocemente di quanto non permetta la funzione digitalwrite. Soluzione La funzione digitalwrite è comoda da utilizzare ma per avere maggiore velocità si possono impostare direttamente i bit sui registri hardware che controllano i pin digitali. Nello sketch seguente si utilizza l'io hardware diretto per inviare un codice Morse ad una radio AM sintonizzata su 1 Mhz. La tecnica è 30 volte più veloce della funzione digitalwrite.
114 const int sendpin=2; const byte WPM = 12; const long repeatcount = / WPM; const byte dot= 1; const byte dash = 3; const byte gap = 3; const byte wordgap = 7; byte letter = 0; //la lettera da inviare char *arduino = " "; void setup() { pinmode(sendpin, OUTPUT); pinmode(13,output); delay(2000); void loop() { sendmorse(arduino); delay(2000);
115 void sendmorse(char * string) { letter=0; while(string[letter]!=0) { if (string[letter] == '.') senddot(); else if(string[letter] == '-') senddash(); else if (string[letter] == ' ') sendgap(); else if (string[letter] == 0) sendwordgap(); letter=letter+1; void senddot() { digitalwrite(13,high); transmitcarrier(dot * repeatcount); digitalwrite(13,low); sendgap(); void senddash() { digitalwrite(13,high); transmitcarrier( dash * repeatcount); digitalwrite(13,low); sendgap(); void sendgap() { transmitnocarrier(gap * repeatcount);
116 void sendwordgap() { transmitnocarrier(wordgap * repeatcount); void transmitcarrier(long count) { while (count--) { bitset(portd,sendpin); bitset(portd,sendpin); bitset(portd,sendpin); bitset(portd,sendpin); bitclear(portd, sendpin); void transmitnocarrier(long count) { while(count--) { bitclear(portd, sendpin); bitclear(portd, sendpin); bitclear(portd, sendpin); bitclear(portd, sendpin); bitclear(portd, sendpin);
117 Discussione bitset e bitclear non sono funzioni ma sono macro di una sola istruzione in codice macchina. I pin digitali da 0 a 7 sono controllati dal registro di nome PORTD mentre i pin da 8 a 13 si trovano sul registro PORTB. Su Arduino a 16 Mhz una istruzione viene eseguita in 62.5 nanosecondi. Nello sketch c'è una sola bitclear contro 4 bitset per via del tempo necessario ad aggiornare e controllare la variabile count del ciclo while.
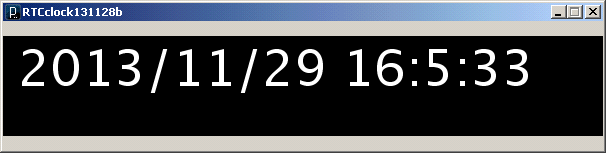
118 Utilizzare lo shield RTC Problema Avere un orologio di sistema Soluzione Utilizzare un RTC(Real time clock) shield che permette di avere un orario preciso sollevando il microcontrollore dall'onere di gestire l'orologio di sistema. Lo shield viene inserito in una struttura a sandwich con sotto arduino e sopra un eventuale altro shield. La RTC shield dispone di una batteria tampone per mantenere l'orario anche senza alimentazione.
119 #include <Wire.h> // la scheda utilizza il bus I2C #include "RTClib.h // libreria da aggiungere RTC_DS1307 RTC; void setup () { Serial.begin(9600); Wire.begin(); RTC.begin(); if (!RTC.isrunning()) { Serial.println("RTC is not running!"); // la linea seguente setta RTC alla data e all'ora della compilazione RTC.adjust(DateTime( DATE, TIME )); Crea oggetto di tipo DataTime( variabili di sistema) RTC.sqw(1); // lampeggio del led ogni secondo
120 void loop () { DateTime now = RTC.now(); Serial.print(now.year(), DEC); Serial.print('/'); Serial.print(now.month(), DEC); Serial.print('/'); Serial.print(now.day(), DEC); Serial.print(' '); Serial.print(now.hour(), DEC); Serial.print(':'); Serial.print(now.minute(), DEC); Serial.print(':'); Serial.print(now.second(), DEC); Serial.println(); delay(1000);
121 import processing.serial.*; Serial myport; // The serial port void setup() { size(600,100); println(serial.list()); // List all the available serial ports background(0); myport = new Serial(this, Serial.list()[2], 9600); void draw() { delay(1000); background(0); // nero while (myport.available() > 0) { String inbuffer = myport.readstring(); if (inbuffer!= null) { fill(255); textsize(50); text(inbuffer, 15, 50);
122
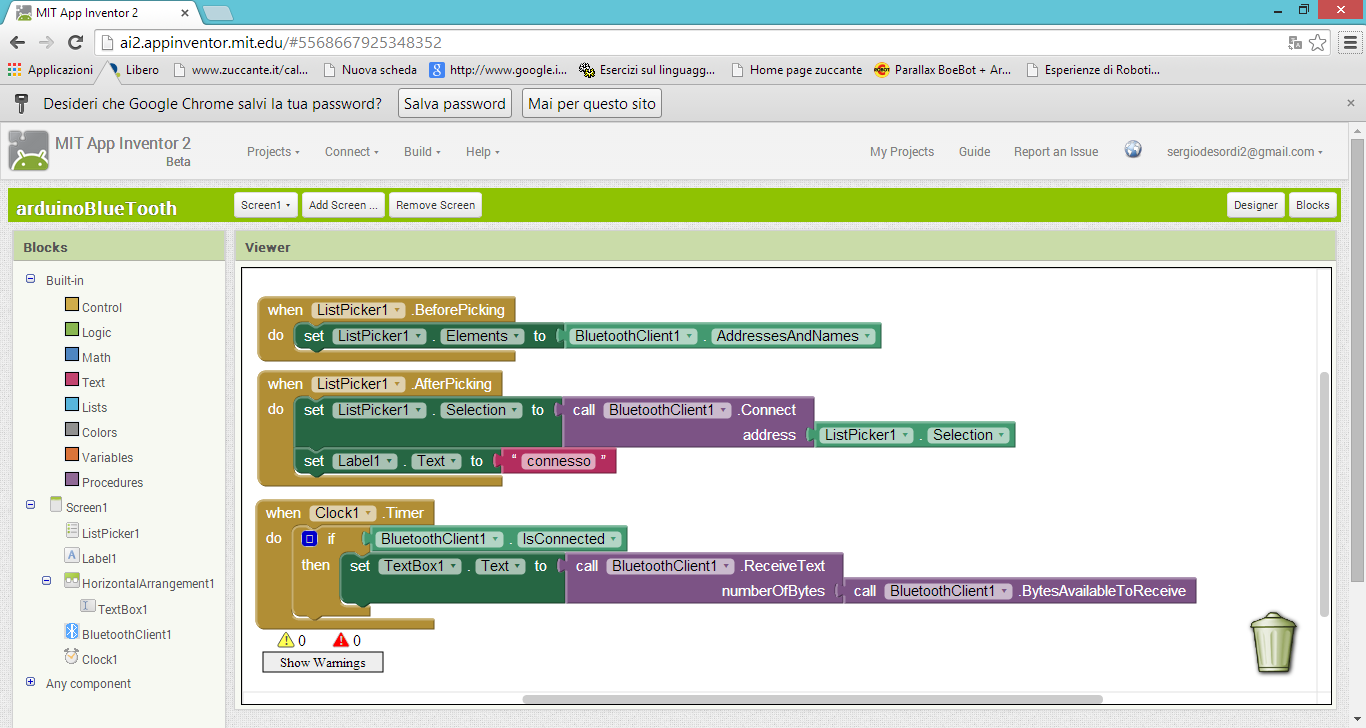
123 Utilizzare una shield bluetooth Problema Mettere in comunicazione Arduino con dispositivi mobili Android smart phone e tablet. Soluzione Utilizzare una shield bluetooth con funzionalità slave La shield viene inserita in una struttura a sandwich con sotto arduino e sopra una eventuale altra shield. Oltre allo sketch su arduino con utilizzo della shield è necessario anche utilizzare un applicativo per s.o. Android Bluetooth Shield SKU: SLD63030P
124 Lo sketch su arduino rileva la temperatura attraverso un termistore, sensore ntc, e invia l'informazione attraverso un canale bluetooth a bps. La scheda bluetooth viene configurata con funzionalità slave. E' necessario che il dispositivo android, dopo aver acceso il bluetooth, si associ alla scheda di arduino con codice 0000.
125 #include <SoftwareSerial.h> //Software Serial Port #define RxD 7 #define TxD 6 #define PIN_TEMP A5 void setupbluetoothconnection() { bluetoothserial.begin(38400); // Set BluetoothBee BaudRate to default baud rate bluetoothserial.print("\r\n+stwmod=0\r\n"); // set the bluetooth work in slave mode bluetoothserial.print("\r\n+stna=seeedbtslave\r\n"); // set the bluetooth name as "SeeedBTSlave" bluetoothserial.print("\r\n+stoaut=1\r\n"); // Permit Paired device to connect me bluetoothserial.print("\r\n+stauto=0\r\n"); // Auto-connection should be forbidden here delay(3000); // This delay is required. bluetoothserial.print("\r\n+inq=1\r\n"); // make the slave bluetooth inquirable Serial.println("The slave bluetooth is inquirable!"); delay(2000); // This delay is required. bluetoothserial.flush();
126 SoftwareSerial bluetoothserial(rxd,txd); int gettemp() { int a = analogread(pin_temp); int B=3975; float resistance = (float)(1023-a)*10000/a; float temperature = temperature=1/(log(resistance/10000)/b+1/298.15)273.15; return (int)temperature; void setup() { pinmode(rxd, INPUT); pinmode(txd, OUTPUT); setupbluetoothconnection();
127 void loop() { while(1) { bluetoothserial.print("temperatura: "); bluetoothserial.println(gettemp()); delay(3000);
128
129
PROGETTI CON ARDUINO UNO
 PROGETTI CON ARDUINO UNO -Introduzione alla scheda Arduino- www.arduino.cc sistemisds.altervista.org Novembre 2013 - Sergio De Sordi Dispositivo interattivo sensori Arduino attuatori Comportamento software
PROGETTI CON ARDUINO UNO -Introduzione alla scheda Arduino- www.arduino.cc sistemisds.altervista.org Novembre 2013 - Sergio De Sordi Dispositivo interattivo sensori Arduino attuatori Comportamento software
Arduino: Programmazione
 Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
Programmazione formalmente ispirata al linguaggio C da cui deriva. I programmi in ARDUINO sono chiamati Sketch. Un programma è una serie di istruzioni che vengono lette dall alto verso il basso e convertite
7^ parte : Acquisizione della temperatura con LM35 e visualizzazione su display LCD. Author: Ing. Sebastiano Giannitto (ITIS M.
 7^ parte : Acquisizione della temperatura con LM35 e visualizzazione su display LCD Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 6 Lo scopo del progetto è realizzare un termometro
7^ parte : Acquisizione della temperatura con LM35 e visualizzazione su display LCD Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 6 Lo scopo del progetto è realizzare un termometro
Automobile Bluetooth
 Automobile Bluetooth Ivancich Stefano 17 Maggio 2015 SOMMARIO Di seguito s illustra un progetto di un automobile comandata da uno smartphone tramite la connessione Bluetooth. E stata presa una automobilina
Automobile Bluetooth Ivancich Stefano 17 Maggio 2015 SOMMARIO Di seguito s illustra un progetto di un automobile comandata da uno smartphone tramite la connessione Bluetooth. E stata presa una automobilina
12 - timer da cucina display a 4 cifre
 12 - timer da cucina display a 4 cifre Il display led da 4 cifre utilizzato in questo esercizio e il modello HS410561K-32. Questo modello, e caratterizzato da 4 anodi (uno per ogni cifra) e dai 8 catodi,
12 - timer da cucina display a 4 cifre Il display led da 4 cifre utilizzato in questo esercizio e il modello HS410561K-32. Questo modello, e caratterizzato da 4 anodi (uno per ogni cifra) e dai 8 catodi,
Corso Base Arduino ed Elettronica
 Corso Base Arduino ed Elettronica Secondo incontro Saldatura e Relatore: Roberto Beligni rbeligni@altratecnoloiga.com L'ambiente di sviluppo L'ambiente di sviluppo di Arduino (Chiamato IDE) facilita la
Corso Base Arduino ed Elettronica Secondo incontro Saldatura e Relatore: Roberto Beligni rbeligni@altratecnoloiga.com L'ambiente di sviluppo L'ambiente di sviluppo di Arduino (Chiamato IDE) facilita la
Programmazione di Base Variabili Array Funzioni Strutture di controllo. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") Programmazione di Base Variabili Array Funzioni Strutture di controllo Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) 3^ parte Com è fatto Arduino Programmazione da USB Nota: Firmware: Insieme
Programmazione di Base Variabili Array Funzioni Strutture di controllo Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) 3^ parte Com è fatto Arduino Programmazione da USB Nota: Firmware: Insieme
Per scrivere una procedura che non deve restituire nessun valore e deve solo contenere le informazioni per le modalità delle porte e controlli
 CODICE Le fonti in cui si possono trovare tutorial o esempi di progetti utilizzati con Arduino si trovano nel sito ufficiale di Arduino, oppure nei forum di domotica e robotica. Il codice utilizzato per
CODICE Le fonti in cui si possono trovare tutorial o esempi di progetti utilizzati con Arduino si trovano nel sito ufficiale di Arduino, oppure nei forum di domotica e robotica. Il codice utilizzato per
D sistema d allarme con sensori magnetici
 D sistema d allarme con sensori magnetici Il sistema di allarme proposto in questa nota prevede l utilizzo di sensori reed per rilevare l apertura di porte e/o finestre. Il programma prevede due sensori,
D sistema d allarme con sensori magnetici Il sistema di allarme proposto in questa nota prevede l utilizzo di sensori reed per rilevare l apertura di porte e/o finestre. Il programma prevede due sensori,
ARDUINO. Ing. Francesco Giurlanda francesco.giurlanda@iet.unipi.it
 ARDUINO Ing. Francesco Giurlanda francesco.giurlanda@iet.unipi.it Cos'è ARDUINO? Il progetto nasce ad Ivrea, nel 2005. Obiettivo: realizzare un sistema di prototipizzazione economico. Al Maggio del 2011
ARDUINO Ing. Francesco Giurlanda francesco.giurlanda@iet.unipi.it Cos'è ARDUINO? Il progetto nasce ad Ivrea, nel 2005. Obiettivo: realizzare un sistema di prototipizzazione economico. Al Maggio del 2011
Telecontrollo escavatore LEGO con board Arduino
 Telecontrollo escavatore LEGO con board Arduino Elenco materiale: - Arduino Uno R3 - LEGO Technic set 42006-3 Motori M di Lego (9V) - 2 integrati L293NE (ponte H) - 1838T (ricevitore infrarossi) - THDZ
Telecontrollo escavatore LEGO con board Arduino Elenco materiale: - Arduino Uno R3 - LEGO Technic set 42006-3 Motori M di Lego (9V) - 2 integrati L293NE (ponte H) - 1838T (ricevitore infrarossi) - THDZ
Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android...
 Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Sommario Indruduzione... 1 Il modulo Bluetooth HC-06... 2 Il firmware... 3 Collegamento della scheda... 4 Software PC e l applicazione Android... 4 Indruduzione La scheda può controllare fino a quattro
Invio SMS. DM Board ICS Invio SMS
 Invio SMS In questo programma proveremo ad inviare un SMS ad ogni pressione di uno dei 2 tasti della DM Board ICS. Per prima cosa creiamo un nuovo progetto premendo sul pulsante (Create new project): dove
Invio SMS In questo programma proveremo ad inviare un SMS ad ogni pressione di uno dei 2 tasti della DM Board ICS. Per prima cosa creiamo un nuovo progetto premendo sul pulsante (Create new project): dove
TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA
 TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA Molte persone (io compreso) che comprano la prima volta un LM35, lo fanno perché sono spinti da come sia facile da
TUTORIAL: COME USARE UN LM35 PER MISURARE UNA TEMPERATURA SU TUTTA LA SCALA CENTIGRADA Molte persone (io compreso) che comprano la prima volta un LM35, lo fanno perché sono spinti da come sia facile da
8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N. Author: Ing. Sebastiano Giannitto (ITIS M.
 8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Come pilotare un motore passo passo usando l integrato L298N Nelle nostre
8^ parte : Pilotare Motori passo-passo bipolari usando l integrato L298N Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Come pilotare un motore passo passo usando l integrato L298N Nelle nostre
6^ parte : Acquisizione della temperatura con LM35. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 6^ parte : Acquisizione della temperatura con LM35 Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 5 Lo scopo è quello di far accendere due LED in base ad una soglia di temperatura
6^ parte : Acquisizione della temperatura con LM35 Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Esperienzan 5 Lo scopo è quello di far accendere due LED in base ad una soglia di temperatura
ZIMO. Decoder per accessori MX81. Manuale istruzioni del. nella variante MX81/N per il formato dei dati NMRA-DCC
 ZIMO Manuale istruzioni del Decoder per accessori MX81 nella variante MX81/N per il formato dei dati NMRA-DCC etichetta verde Sommario 1. GENERALITÀ... 3 2. CARATTERISTICHE E DATI TECNICI... 3 3. COLLEGAMENTO
ZIMO Manuale istruzioni del Decoder per accessori MX81 nella variante MX81/N per il formato dei dati NMRA-DCC etichetta verde Sommario 1. GENERALITÀ... 3 2. CARATTERISTICHE E DATI TECNICI... 3 3. COLLEGAMENTO
Arduino. Laboratorio Arduino Base. HackLab Terni. Laboratorio aperto a tutti di elettronica, scienza e arte. hacklabterni.
 Laboratorio Base HackLab Terni Laboratorio aperto a tutti di elettronica, scienza e arte. hacklabterni.org Cos'è? è una piattaforma di prototipazione elettronica open-source basata su microcontrollore
Laboratorio Base HackLab Terni Laboratorio aperto a tutti di elettronica, scienza e arte. hacklabterni.org Cos'è? è una piattaforma di prototipazione elettronica open-source basata su microcontrollore
Introduzione alla programmazione in C
 Introduzione alla programmazione in C Testi Consigliati: A. Kelley & I. Pohl C didattica e programmazione B.W. Kernighan & D. M. Ritchie Linguaggio C P. Tosoratti Introduzione all informatica Materiale
Introduzione alla programmazione in C Testi Consigliati: A. Kelley & I. Pohl C didattica e programmazione B.W. Kernighan & D. M. Ritchie Linguaggio C P. Tosoratti Introduzione all informatica Materiale
// Controllo remoto 05/05/2012 // poichè sono ancora ai primi passi ho usato // a larghe mani idee e listati di altri. Ringrazio tutti loro.
 // Controllo remoto 05/05/2012 // poichè sono ancora ai primi passi ho usato // a larghe mani idee e listati di altri. Ringrazio tutti loro. // Librerie necessarie per il progetto #include #include
// Controllo remoto 05/05/2012 // poichè sono ancora ai primi passi ho usato // a larghe mani idee e listati di altri. Ringrazio tutti loro. // Librerie necessarie per il progetto #include #include
I componenti di un Sistema di elaborazione. Memoria centrale. È costituita da una serie di CHIP disposti su una scheda elettronica
 I componenti di un Sistema di elaborazione. Memoria centrale Memorizza : istruzioni dati In forma BINARIA : 10001010101000110101... È costituita da una serie di CHIP disposti su una scheda elettronica
I componenti di un Sistema di elaborazione. Memoria centrale Memorizza : istruzioni dati In forma BINARIA : 10001010101000110101... È costituita da una serie di CHIP disposti su una scheda elettronica
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
OSCILLATORI AL QUARZO: CONTASECONDI
 ... OSCILLATORI AL QUARZO: CONTASECONDI di Maurizio Del Corso m.delcorso@farelettronica.com Come può un cristallo di quarzo oscillare ad una determinata frequenza? Quale spiegazione fisica c è dietro a
... OSCILLATORI AL QUARZO: CONTASECONDI di Maurizio Del Corso m.delcorso@farelettronica.com Come può un cristallo di quarzo oscillare ad una determinata frequenza? Quale spiegazione fisica c è dietro a
Arduino. Led, pulsanti, PWM, tastierino, display sette segmenti, display LCD
 Arduino Led, pulsanti, PWM, tastierino, display sette segmenti, display LCD Accendere e spegnere i led in void setup() { for(int i=2;i
Arduino Led, pulsanti, PWM, tastierino, display sette segmenti, display LCD Accendere e spegnere i led in void setup() { for(int i=2;i
11^ parte : Come gestire i servomotori con Arduino. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") 11^ parte : Come gestire i servomotori con Arduino Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Un servomotore è un dispositivo capace di eseguire dei movimenti meccanici in funzione del
11^ parte : Come gestire i servomotori con Arduino Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) Un servomotore è un dispositivo capace di eseguire dei movimenti meccanici in funzione del
Esame di INFORMATICA
 Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Università di L Aquila Facoltà di Biotecnologie Esame di INFORMATICA Lezione 4 MACCHINA DI VON NEUMANN Anni 40 i dati e i programmi che descrivono come elaborare i dati possono essere codificati nello
Comprendere il funzionamento dei convertitori V/f Saper effettuare misure di collaudo
 SCH 33 Voltmetro a 3 digit Obiettivi Comprendere il funzionamento dei convertitori V/f Saper effettuare misure di collaudo IC1 = CA 3162 A/D converter for 3-Digit Display IC2 = CA 3161 BCD to seven segment
SCH 33 Voltmetro a 3 digit Obiettivi Comprendere il funzionamento dei convertitori V/f Saper effettuare misure di collaudo IC1 = CA 3162 A/D converter for 3-Digit Display IC2 = CA 3161 BCD to seven segment
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 2ª) ver. Classe 3BN (elettronica) marzo 22 Giorgio Carpignano I.I.S. Primo LEVI - TORINO Il menù per oggi Lettura dei pulsanti Comunicazione
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 2ª) ver. Classe 3BN (elettronica) marzo 22 Giorgio Carpignano I.I.S. Primo LEVI - TORINO Il menù per oggi Lettura dei pulsanti Comunicazione
Sezione di PWM e Generatore di D/A Converter.
 Corso di BASCOM AVR - (34) Corso Teorico/Pratico di programmazione in BASCOM AVR. Autore: DAMINO Salvatore. Sezione di PWM e Generatore di D/A Converter. La struttura interna dei Mini Moduli è composta
Corso di BASCOM AVR - (34) Corso Teorico/Pratico di programmazione in BASCOM AVR. Autore: DAMINO Salvatore. Sezione di PWM e Generatore di D/A Converter. La struttura interna dei Mini Moduli è composta
Università di Torino Facoltà di Scienze MFN Corso di Studi in Informatica. Programmazione I - corso B a.a. 2009-10. prof.
 Università di Torino Facoltà di Scienze MFN Corso di Studi in Informatica Programmazione I - corso B a.a. 009-10 prof. Viviana Bono Blocco 9 Metodi statici: passaggio parametri, variabili locali, record
Università di Torino Facoltà di Scienze MFN Corso di Studi in Informatica Programmazione I - corso B a.a. 009-10 prof. Viviana Bono Blocco 9 Metodi statici: passaggio parametri, variabili locali, record
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisisti preliminari A.A. 2012 2013 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Progetto di Domotica
 Progetto di Domotica Titolo dell esercitazione: Progetto di Domotica Descrizione sommaria dell esperienza: Realizzazione di un circuito che permette il controllo di vari sensori all interno di un edificio.
Progetto di Domotica Titolo dell esercitazione: Progetto di Domotica Descrizione sommaria dell esperienza: Realizzazione di un circuito che permette il controllo di vari sensori all interno di un edificio.
G S M C O M M A N D E R Duo S
 Il GSM Commander Duo S permette, di attivare indipendentemente o contemporaneamente due contatti elettrici, Contatto1 (C1) e Contatto2 (C2), attraverso una chiamata telefonica a costo zero al numero della
Il GSM Commander Duo S permette, di attivare indipendentemente o contemporaneamente due contatti elettrici, Contatto1 (C1) e Contatto2 (C2), attraverso una chiamata telefonica a costo zero al numero della
LABORATORIO DI SISTEMI
 ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
Ricevitore Supervisionato RX-24 Dati tecnici
 Ricevitore Supervisionato RX-24 Dati tecnici Gestione a microprocessore 24 sensori memorizzabili 8 uscite allarme uno per canale 8 canali con 3 sensori per ogni canale 10 telecomandi programmabili 1 uscita
Ricevitore Supervisionato RX-24 Dati tecnici Gestione a microprocessore 24 sensori memorizzabili 8 uscite allarme uno per canale 8 canali con 3 sensori per ogni canale 10 telecomandi programmabili 1 uscita
Introduzione a Arduino
 Introduzione a Arduino Gianpaolo Gonnelli gianpaolo.gonnelli@gmail.com Arduino 1 Contenu7 l Cosa è? l Da cosa è composto? l Alcuni componen7 u7li l Programmare Arduino l Esperimen7 l Comunicare col PC
Introduzione a Arduino Gianpaolo Gonnelli gianpaolo.gonnelli@gmail.com Arduino 1 Contenu7 l Cosa è? l Da cosa è composto? l Alcuni componen7 u7li l Programmare Arduino l Esperimen7 l Comunicare col PC
Sistema acquisizione dati
 12 Sistema acquisizione dati 3.1 Introduzione: Per convertire i segnali analogici trasmessi dai sensori in segnali digitali dobbiamo usare i convertitori analogici digitali o più comunemente chiamati ADC(Analog-to-Digital
12 Sistema acquisizione dati 3.1 Introduzione: Per convertire i segnali analogici trasmessi dai sensori in segnali digitali dobbiamo usare i convertitori analogici digitali o più comunemente chiamati ADC(Analog-to-Digital
Motore passo passo: Laboratorio di Elettronica 1
 Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
Motore passo passo: Laboratorio di Elettronica 1 Motore passo passo: Cuscinetto Rotore Cuscinetto Statore Laboratorio di Elettronica 2 Motore passo passo: Statore ( #8 bobine contrapposte a due a due:
ESERCIZI - SERIE N.1
 ESERCIZI - SERIE N.1 ACQUISIZIONE DELLO STATO DI SEGNALI ON/OFF Problema: acquisizione, da parte di un'unità di elaborazione realizzata con tecnologia a funzionalità programmata, di un'informazione proveniente
ESERCIZI - SERIE N.1 ACQUISIZIONE DELLO STATO DI SEGNALI ON/OFF Problema: acquisizione, da parte di un'unità di elaborazione realizzata con tecnologia a funzionalità programmata, di un'informazione proveniente
Funzioni in C. Violetta Lonati
 Università degli studi di Milano Dipartimento di Scienze dell Informazione Laboratorio di algoritmi e strutture dati Corso di laurea in Informatica Funzioni - in breve: Funzioni Definizione di funzioni
Università degli studi di Milano Dipartimento di Scienze dell Informazione Laboratorio di algoritmi e strutture dati Corso di laurea in Informatica Funzioni - in breve: Funzioni Definizione di funzioni
Arduino UNO. Single board microcontroller
 Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
Programmatore per telaio scheller
 Divo Di Lupo Sistemi per telai Cotton Bentley Monk Textima Scheller Closa Boehringer http://www.divodilupo.191.it/ Programmatore per telaio scheller Attuatore USB semplificato Numero totale di pagine =
Divo Di Lupo Sistemi per telai Cotton Bentley Monk Textima Scheller Closa Boehringer http://www.divodilupo.191.it/ Programmatore per telaio scheller Attuatore USB semplificato Numero totale di pagine =
ESERCITAZIONI PRATICHE: Ø Creazione di un decoder BCD/DEC con porte logiche. Ø Esercitazione con decoder 4511 e display 7 segmenti.
 BCD 7 SEGMENTI Il display BCD 7 segmenti è un visualizzatore di numeri che possono andare da zero a nove, ed è un dispositivo optoelettrico, cioè fornisce luce all applicazione di tensione ai suoi capi.
BCD 7 SEGMENTI Il display BCD 7 segmenti è un visualizzatore di numeri che possono andare da zero a nove, ed è un dispositivo optoelettrico, cioè fornisce luce all applicazione di tensione ai suoi capi.
IRSplit. Istruzioni d uso 07/10-01 PC
 3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
3456 IRSplit Istruzioni d uso 07/10-01 PC 2 IRSplit Istruzioni d uso Indice 1. Requisiti Hardware e Software 4 1.1 Requisiti Hardware 4 1.2 Requisiti Software 4 2. Installazione 4 3. Concetti fondamentali
Definire all'interno del codice un vettore di interi di dimensione DIM, es. int array[] = {1, 5, 2, 4, 8, 1, 1, 9, 11, 4, 12};
![Definire all'interno del codice un vettore di interi di dimensione DIM, es. int array[] = {1, 5, 2, 4, 8, 1, 1, 9, 11, 4, 12};](/thumbs/24/3689577.jpg "Definire all'interno del codice un vettore di interi di dimensione DIM, es. int array[] = {1, 5, 2, 4, 8, 1, 1, 9, 11, 4, 12};") ESERCIZI 2 LABORATORIO Problema 1 Definire all'interno del codice un vettore di interi di dimensione DIM, es. int array[] = {1, 5, 2, 4, 8, 1, 1, 9, 11, 4, 12}; Chiede all'utente un numero e, tramite ricerca
ESERCIZI 2 LABORATORIO Problema 1 Definire all'interno del codice un vettore di interi di dimensione DIM, es. int array[] = {1, 5, 2, 4, 8, 1, 1, 9, 11, 4, 12}; Chiede all'utente un numero e, tramite ricerca
FrerEnergy: PROGRAMMA PER LA SUPERVISIONE DEI CONSUMI DI ENERGIA ELETTRICA
 FrerEnergy: PROGRAMMA PER LA SUPERVISIONE DEI CONSUMI DI ENERGIA ELETTRICA Descrizione Generale E un programma di supervisione in grado di comunicare, visualizzare, memorizzare e stampare i consumi dell
FrerEnergy: PROGRAMMA PER LA SUPERVISIONE DEI CONSUMI DI ENERGIA ELETTRICA Descrizione Generale E un programma di supervisione in grado di comunicare, visualizzare, memorizzare e stampare i consumi dell
Registratori di Cassa
 modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
modulo Registratori di Cassa Interfacciamento con Registratore di Cassa RCH Nucleo@light GDO BREVE GUIDA ( su logiche di funzionamento e modalità d uso ) www.impresa24.ilsole24ore.com 1 Sommario Introduzione...
INTERFACCIA PER PC MEDIANTE PORTA SERIALE
 INTERFACCIA PER PC MEDIANTE PORTA SERIALE Scheda d interfaccia per PC da collegare alla porta seriale. Consente di controllare otto uscite a relè e di leggere otto ingressi digitali e due analogici. Un
INTERFACCIA PER PC MEDIANTE PORTA SERIALE Scheda d interfaccia per PC da collegare alla porta seriale. Consente di controllare otto uscite a relè e di leggere otto ingressi digitali e due analogici. Un
CONTASECONDI CON DISPLAY A 7 SEGMENTI ARDUINO LIKE
 SCHEDA DI LABORATORIO N 3 CONTASECONDI CON DISPLAY A 7 SEGMENTI ARDUINO LIKE Si vuole realizzare un contasecondi con display a 7 segmenti utilizzando la scheda Arduino. Materiale occorrente: N 1 Bread
SCHEDA DI LABORATORIO N 3 CONTASECONDI CON DISPLAY A 7 SEGMENTI ARDUINO LIKE Si vuole realizzare un contasecondi con display a 7 segmenti utilizzando la scheda Arduino. Materiale occorrente: N 1 Bread
NTC E MISURA DELLA TEMPERATURA CON ARDUINO
 NTC E MISURA DELLA TEMPERATURA CON ARDUINO Una NTC (Negative Temperature Coefficient resistenza a coefficiente di temperatura negativo) è una resistenza che cambia il suo valore con il variare della temperatura.
NTC E MISURA DELLA TEMPERATURA CON ARDUINO Una NTC (Negative Temperature Coefficient resistenza a coefficiente di temperatura negativo) è una resistenza che cambia il suo valore con il variare della temperatura.
I TUTORI. I tutori vanno creati la prima volta seguendo esclusivamente le procedure sotto descritte.
 I TUTORI Indice Del Manuale 1 - Introduzione al Manuale Operativo 2 - Area Tutore o Area Studente? 3 - Come creare tutti insieme i Tutori per ogni alunno? 3.1 - Come creare il secondo tutore per ogni alunno?
I TUTORI Indice Del Manuale 1 - Introduzione al Manuale Operativo 2 - Area Tutore o Area Studente? 3 - Come creare tutti insieme i Tutori per ogni alunno? 3.1 - Come creare il secondo tutore per ogni alunno?
VOCALIST S I N T E S I V O C A L E V I A R A D I O C O N A T T I V A Z I O N E MANUALE D USO E INSTALLAZIONE (VERSIONE 2.0 .0)
") VOCALIST S I N T E S I V O C A L E V I A R A D I O C O N A T T I V A Z I O N E MANUALE D USO E INSTALLAZIONE (VERSIONE 2.0.0) Vi ringraziamo per aver scelto il nostro prodotto. Vi invitiamo a leggere attentamente
VOCALIST S I N T E S I V O C A L E V I A R A D I O C O N A T T I V A Z I O N E MANUALE D USO E INSTALLAZIONE (VERSIONE 2.0.0) Vi ringraziamo per aver scelto il nostro prodotto. Vi invitiamo a leggere attentamente
TASTIERA DI COMANDO E CONTROLLO PER INVERTERS EL.-5000
 ELCOM S.R.L. TASTIERA DI COMANDO E CONTROLLO PER INVERTERS EL.-5000 ( Rev. 0.3s ) MANUALE USO TASTIERA EL.-5000 I pulsanti hanno le seguenti funzioni: Comando di START abilitazione alla marcia con accensione
ELCOM S.R.L. TASTIERA DI COMANDO E CONTROLLO PER INVERTERS EL.-5000 ( Rev. 0.3s ) MANUALE USO TASTIERA EL.-5000 I pulsanti hanno le seguenti funzioni: Comando di START abilitazione alla marcia con accensione
CORSO ARDUINO. Giulio Fieramosca Stefano Panichi. Corsi GOLEM 2014
 CORSO ARDUINO Giulio Fieramosca Stefano Panichi Corsi GOLEM 2014 Cosa c'è dietro Arduino? Pensiamo sia essenziale giocare con la tecnologia, esplorando le diverse possibilità di hardware e software spesso
CORSO ARDUINO Giulio Fieramosca Stefano Panichi Corsi GOLEM 2014 Cosa c'è dietro Arduino? Pensiamo sia essenziale giocare con la tecnologia, esplorando le diverse possibilità di hardware e software spesso
EXCEL PER WINDOWS95. sfruttare le potenzialità di calcolo dei personal computer. Essi si basano su un area di lavoro, detta foglio di lavoro,
 EXCEL PER WINDOWS95 1.Introduzione ai fogli elettronici I fogli elettronici sono delle applicazioni che permettono di sfruttare le potenzialità di calcolo dei personal computer. Essi si basano su un area
EXCEL PER WINDOWS95 1.Introduzione ai fogli elettronici I fogli elettronici sono delle applicazioni che permettono di sfruttare le potenzialità di calcolo dei personal computer. Essi si basano su un area
Università degli studi di Roma LA SAPIENZA
 Università degli studi di Roma LA SAPIENZA Corso di ingegneria informatica e automatica Automazione I Realizzazione di una macchinina in grado di evitare le collisioni Di Alessandro Giuseppi All attenzione
Università degli studi di Roma LA SAPIENZA Corso di ingegneria informatica e automatica Automazione I Realizzazione di una macchinina in grado di evitare le collisioni Di Alessandro Giuseppi All attenzione
Tipi primitivi. Ad esempio, il codice seguente dichiara una variabile di tipo intero, le assegna il valore 5 e stampa a schermo il suo contenuto:
 Tipi primitivi Il linguaggio Java offre alcuni tipi di dato primitivi Una variabile di tipo primitivo può essere utilizzata direttamente. Non è un riferimento e non ha senso tentare di istanziarla mediante
Tipi primitivi Il linguaggio Java offre alcuni tipi di dato primitivi Una variabile di tipo primitivo può essere utilizzata direttamente. Non è un riferimento e non ha senso tentare di istanziarla mediante
SINT-13 SINTESI VOCALE VIA RADIO CON ATTIVAZIONE. Il presente manuale può essere soggetto a modifiche senza preavviso
 SINT-13 SINTESI VOCALE VIA RADIO CON ATTIVAZIONE MANUALE D USO E INSTALLAZIONE (VERSIONE 1.1) Il presente manuale può essere soggetto a modifiche senza preavviso Vi ringraziamo per aver scelto il nostro
SINT-13 SINTESI VOCALE VIA RADIO CON ATTIVAZIONE MANUALE D USO E INSTALLAZIONE (VERSIONE 1.1) Il presente manuale può essere soggetto a modifiche senza preavviso Vi ringraziamo per aver scelto il nostro
La programmazione di Arduino
 La programmazione di Arduino Si analizza la sintassi delle principali istruzioni per Arduino mediante alcuni esempi applicativi (sketch); per la sintassi completa del linguaggio di programmazione di Arduino
La programmazione di Arduino Si analizza la sintassi delle principali istruzioni per Arduino mediante alcuni esempi applicativi (sketch); per la sintassi completa del linguaggio di programmazione di Arduino
Struttura del calcolatore
 Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Struttura del calcolatore Proprietà: Flessibilità: la stessa macchina può essere utilizzata per compiti differenti, nessuno dei quali è predefinito al momento della costruzione Velocità di elaborazione
Esercitazione Controllo di un motore DC mediante Arduino YUN
 Percorsi Abilitanti Speciali A.A. 2013/2014 classe abilitazione C320 LABORATORIO MECCANICO TECNOLOGICO Esercitazione Controllo di un motore DC mediante Arduino YUN Pag. 2 SOMMARIO Presentazione delle caratteristiche
Percorsi Abilitanti Speciali A.A. 2013/2014 classe abilitazione C320 LABORATORIO MECCANICO TECNOLOGICO Esercitazione Controllo di un motore DC mediante Arduino YUN Pag. 2 SOMMARIO Presentazione delle caratteristiche
Progetto Esami Di Stato Anno 2014/2015
 Progetto Esami Di Stato Anno 2014/2015 Candidato: Ardilio Angelica Classe: 5 B - I.T.I.S. Elettronica ed Elettrotecnica. T.P.S.E.E. Tecnologia & Progettazione di Sistemi Elettrici ed Elettronici ARDUINO.
Progetto Esami Di Stato Anno 2014/2015 Candidato: Ardilio Angelica Classe: 5 B - I.T.I.S. Elettronica ed Elettrotecnica. T.P.S.E.E. Tecnologia & Progettazione di Sistemi Elettrici ed Elettronici ARDUINO.
10. Funzionamento dell inverter
 10. Funzionamento dell inverter 10.1 Controllo prima della messa in servizio Verificare i seguenti punti prima di fornire alimentazione all inverter: 10.2 Diversi metodi di funzionamento Esistono diversi
10. Funzionamento dell inverter 10.1 Controllo prima della messa in servizio Verificare i seguenti punti prima di fornire alimentazione all inverter: 10.2 Diversi metodi di funzionamento Esistono diversi
Manuale di programmazione BerMar_Drive_Software
 Invert er LG Manuale di programmazione BerMar_Drive_Software Mot ori elet t ric i Informazioni preliminari... 2 Installazione... 3 Avvio del programma... 4 Funzionamento Off-Line... 7 Caricamento di una
Invert er LG Manuale di programmazione BerMar_Drive_Software Mot ori elet t ric i Informazioni preliminari... 2 Installazione... 3 Avvio del programma... 4 Funzionamento Off-Line... 7 Caricamento di una
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari
 Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari A.A. 2013 2014 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Laboratorio di Ingegneria del software Sistema di controllo di un ascensore Requisiti preliminari A.A. 2013 2014 1 Introduzione Questo documento raccoglie i requisiti preliminari per il software di controllo
Manuale d uso Giove CA3MKII
 Manuale d uso Giove CA3MKII Linea GIOVE indice ----Descrizione comandi pag 3 ----Connessioni pag 3 ----Schema di collegamento Giove CA3 mk2 con Giove CA20/21 pag 4 ----Cavo di collegamento RS485 pag 5
Manuale d uso Giove CA3MKII Linea GIOVE indice ----Descrizione comandi pag 3 ----Connessioni pag 3 ----Schema di collegamento Giove CA3 mk2 con Giove CA20/21 pag 4 ----Cavo di collegamento RS485 pag 5
Progetti reali con ARDUINO
 Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
Progetti reali con ARDUINO Introduzione alla scheda Arduino (parte 5ª) giugno 2013 Giorgio Carpignano I.I.S. PRIMO LEVI C.so Unione Sovietica 490 (TO) Materiale didattico: www.iisprimolevi.it Servomotori
MANUALE CONFIGURAZIONE ED UTILIZZO GATEWAY MBUS-MODBUS (RTU/TCP) MODELLO PiiGAB M900
 MODELLO PiiGAB M900") MANUALE CONFIGURAZIONE ED UTILIZZO GATEWAY MBUS-MODBUS (RTU/TCP) MODELLO PiiGAB M900 1. SOFTWARE La configurazione del gateway M900 è realizzata attraverso il software PiiGAB M-Bus Explorer, fornito a
MANUALE CONFIGURAZIONE ED UTILIZZO GATEWAY MBUS-MODBUS (RTU/TCP) MODELLO PiiGAB M900 1. SOFTWARE La configurazione del gateway M900 è realizzata attraverso il software PiiGAB M-Bus Explorer, fornito a
Arduino: manuale di programmazione wiring
 Arduino: manuale di programmazione wiring Introduzione Che cosa e, come si progetta e come si scrive un programma Struttura di un programma Ortografia, grammatica e sintassi Le parole chiave Le istruzioni
Arduino: manuale di programmazione wiring Introduzione Che cosa e, come si progetta e come si scrive un programma Struttura di un programma Ortografia, grammatica e sintassi Le parole chiave Le istruzioni
Microtech Srl. GPS TRACKER v3.0
 Microtech Srl GPS TRACKER v3.0 Manuale d Uso Rev1-1 - Indice: Descrizione pag. 3 Caratteristiche. pag. 3 Accensione/Spegnimento.. pag. 4 Funzionamento pag. 4 Segnalazione di errore pag. 4 Segnalazione
Microtech Srl GPS TRACKER v3.0 Manuale d Uso Rev1-1 - Indice: Descrizione pag. 3 Caratteristiche. pag. 3 Accensione/Spegnimento.. pag. 4 Funzionamento pag. 4 Segnalazione di errore pag. 4 Segnalazione
Raspberry Pi: Hardware Programming. Rossi Pietro Alberto
 Rossi Pietro Alberto Agenda Introduzione Hardware Software Programmazione, primi passi Protocolli di comunicazione Programmazione Conclusioni Introduzione Il Raspberry Pi è una scheda elettronica impementante
Rossi Pietro Alberto Agenda Introduzione Hardware Software Programmazione, primi passi Protocolli di comunicazione Programmazione Conclusioni Introduzione Il Raspberry Pi è una scheda elettronica impementante
Controllo di un Motore Elettrico in Corrente Continua
 Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Motore Elettrico in Corrente Continua ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Guida alla registrazione on-line di un DataLogger
 NovaProject s.r.l. Guida alla registrazione on-line di un DataLogger Revisione 3.0 3/08/2010 Partita IVA / Codice Fiscale: 03034090542 pag. 1 di 17 Contenuti Il presente documento è una guida all accesso
NovaProject s.r.l. Guida alla registrazione on-line di un DataLogger Revisione 3.0 3/08/2010 Partita IVA / Codice Fiscale: 03034090542 pag. 1 di 17 Contenuti Il presente documento è una guida all accesso
Che cos è la barriera luminosa?
 BARRIERA LUMINOSA Che cos è la barriera luminosa? Pezzi da contare Diodo IR o Laser (emittente) Pezzi contati Direzione del nastro trasportatore FOTODIODO (ricevitore) Direzione del nastro trasportatore
BARRIERA LUMINOSA Che cos è la barriera luminosa? Pezzi da contare Diodo IR o Laser (emittente) Pezzi contati Direzione del nastro trasportatore FOTODIODO (ricevitore) Direzione del nastro trasportatore
Semplice progetto con Arduino simpatico G-meter col quale misurare e registrare le accelerazioni del proprio veicolo
 Linux Day 2014 Semplice progetto con Arduino simpatico G-meter col quale misurare e registrare le accelerazioni del proprio veicolo Cos'è Arduino? Arduino è una piattaforma hardware low-cost programmabile,
Linux Day 2014 Semplice progetto con Arduino simpatico G-meter col quale misurare e registrare le accelerazioni del proprio veicolo Cos'è Arduino? Arduino è una piattaforma hardware low-cost programmabile,
Gestione di una UART SOFTWARE.
 Corso di BASCOM 8051 - (Capitolo 3 1 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. Gestione di una UART SOFTWARE. Capita, a volte in alcune applicazioni, di avere
Corso di BASCOM 8051 - (Capitolo 3 1 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. Gestione di una UART SOFTWARE. Capita, a volte in alcune applicazioni, di avere
lo 2 2-1 - PERSONALIZZARE LA FINESTRA DI WORD 2000
 Capittol lo 2 Visualizzazione 2-1 - PERSONALIZZARE LA FINESTRA DI WORD 2000 Nel primo capitolo sono state analizzate le diverse componenti della finestra di Word 2000: barra del titolo, barra dei menu,
Capittol lo 2 Visualizzazione 2-1 - PERSONALIZZARE LA FINESTRA DI WORD 2000 Nel primo capitolo sono state analizzate le diverse componenti della finestra di Word 2000: barra del titolo, barra dei menu,
Tutorial 3DRoom. 3DRoom
 Il presente paragrafo tratta il rilievo di interni ed esterni eseguito con. L utilizzo del software è molto semplice ed immediato. Dopo aver fatto uno schizzo del vano si passa all inserimento delle diagonali
Il presente paragrafo tratta il rilievo di interni ed esterni eseguito con. L utilizzo del software è molto semplice ed immediato. Dopo aver fatto uno schizzo del vano si passa all inserimento delle diagonali
Algebra di Boole: Concetti di base. Fondamenti di Informatica - D. Talia - UNICAL 1. Fondamenti di Informatica
 Fondamenti di Informatica Algebra di Boole: Concetti di base Fondamenti di Informatica - D. Talia - UNICAL 1 Algebra di Boole E un algebra basata su tre operazioni logiche OR AND NOT Ed operandi che possono
Fondamenti di Informatica Algebra di Boole: Concetti di base Fondamenti di Informatica - D. Talia - UNICAL 1 Algebra di Boole E un algebra basata su tre operazioni logiche OR AND NOT Ed operandi che possono
Esercitazione Monitoraggio temperatura via WEB mediante Arduino YUN
 Percorsi Abilitanti Speciali A.A. 2013/2014 classe abilitazione C320 LABORATORIO MECCANICO TECNOLOGICO Esercitazione Monitoraggio temperatura via WEB mediante Arduino YUN Pag. 2 SOMMARIO Presentazione
Percorsi Abilitanti Speciali A.A. 2013/2014 classe abilitazione C320 LABORATORIO MECCANICO TECNOLOGICO Esercitazione Monitoraggio temperatura via WEB mediante Arduino YUN Pag. 2 SOMMARIO Presentazione
Appunti di Sistemi e Automazione
 Appunti di Sistemi e Automazione Il modello o macchina di Von Neumann rappresenta un computer con i suoi componenti principali e la sua organizzazione logico-funzionale. Tale progetto risale al 1945/1946.
Appunti di Sistemi e Automazione Il modello o macchina di Von Neumann rappresenta un computer con i suoi componenti principali e la sua organizzazione logico-funzionale. Tale progetto risale al 1945/1946.
[MANUALE VISUAL BASIC SCUOLA24ORE PROF.SSA PATRIZIA TARANTINO] 14 dicembre 2008
![[MANUALE VISUAL BASIC SCUOLA24ORE PROF.SSA PATRIZIA TARANTINO] 14 dicembre 2008](/thumbs/25/4807743.jpg "[MANUALE VISUAL BASIC SCUOLA24ORE PROF.SSA PATRIZIA TARANTINO] 14 dicembre 2008") Se devo memorizzare più valori che sono in qualche modo parenti dal punto di vista logico, posso usare il concetto di vettore di variabili (array). Ad esempio, se devo memorizzare le temperature di tutti
Se devo memorizzare più valori che sono in qualche modo parenti dal punto di vista logico, posso usare il concetto di vettore di variabili (array). Ad esempio, se devo memorizzare le temperature di tutti
Misure di frequenza e di tempo
 Misure di frequenza e di tempo - 1 Misure di frequenza e di tempo 1 - Contatori universali Schemi e circuiti di riferimento Per la misura di frequenza e di intervalli di tempo vengono diffusamente impiegati
Misure di frequenza e di tempo - 1 Misure di frequenza e di tempo 1 - Contatori universali Schemi e circuiti di riferimento Per la misura di frequenza e di intervalli di tempo vengono diffusamente impiegati
Come modificare la propria Home Page e gli elementi correlati
 Come modificare la propria Home Page e gli elementi correlati Versione del documento: 3.0 Ultimo aggiornamento: 2006-09-15 Riferimento: webmaster (webmaster.economia@unimi.it) La modifica delle informazioni
Come modificare la propria Home Page e gli elementi correlati Versione del documento: 3.0 Ultimo aggiornamento: 2006-09-15 Riferimento: webmaster (webmaster.economia@unimi.it) La modifica delle informazioni
C. P. U. MEMORIA CENTRALE
 C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
C. P. U. INGRESSO MEMORIA CENTRALE USCITA UNITA DI MEMORIA DI MASSA La macchina di Von Neumann Negli anni 40 lo scienziato ungherese Von Neumann realizzò il primo calcolatore digitale con programma memorizzato
SOMMARIO... 3 INTRODUZIONE...
 Sommario SOMMARIO... 3 INTRODUZIONE... 4 INTRODUZIONE ALLE FUNZIONALITÀ DEL PROGRAMMA INTRAWEB... 4 STRUTTURA DEL MANUALE... 4 INSTALLAZIONE INRAWEB VER. 11.0.0.0... 5 1 GESTIONE INTRAWEB VER 11.0.0.0...
Sommario SOMMARIO... 3 INTRODUZIONE... 4 INTRODUZIONE ALLE FUNZIONALITÀ DEL PROGRAMMA INTRAWEB... 4 STRUTTURA DEL MANUALE... 4 INSTALLAZIONE INRAWEB VER. 11.0.0.0... 5 1 GESTIONE INTRAWEB VER 11.0.0.0...
Introduzione all acquisizione Dati
 Introduzione all acquisizione Dati Laboratorio di Robotica Industriale Evoluzione della strumentazione Introduzione all acquisizione dati - 2 Trend nella strumentazione Introduzione all acquisizione dati
Introduzione all acquisizione Dati Laboratorio di Robotica Industriale Evoluzione della strumentazione Introduzione all acquisizione dati - 2 Trend nella strumentazione Introduzione all acquisizione dati
Piattaforma Arduino/microcontrollori Atmel. Ing. Cozzolino Francesco. www.ingegnercozzolino.altervista.org
 Ing. Cozzolino Francesco www.ingegnercozzolino.altervista.org 1 Che cos è Arduino? Arduino è una piattaforma elettronica di piccole dimensioni con un microcontrollore ATMEL montato sopra e una circuiteria
Ing. Cozzolino Francesco www.ingegnercozzolino.altervista.org 1 Che cos è Arduino? Arduino è una piattaforma elettronica di piccole dimensioni con un microcontrollore ATMEL montato sopra e una circuiteria
Finalità delle misure
 Sistemi di controllo industriale tramite Ing. Lorenzo Comolli Finalità delle misure In ambito scientifico,, studiare i fenomeni, verificare sperimentalmente modelli matematici e teorie scientifiche, monitorare
Sistemi di controllo industriale tramite Ing. Lorenzo Comolli Finalità delle misure In ambito scientifico,, studiare i fenomeni, verificare sperimentalmente modelli matematici e teorie scientifiche, monitorare
MANUALE PER L UTENTE. Centrale Antifurto 8 zone a Microprocessore con tastiera di comando. Ver. 1.0 ACCENTA CEN800. MANUALE UTENTE Centrale ACCENTA8
 MANUALE PER L UTENTE ACCENTA CEN800 Ver. 1.0 Centrale Antifurto 8 zone a Microprocessore con tastiera di comando SICURIT Alarmitalia Spa Via Gadames 91 - MILANO (Italy) Tel. 02 38070.1 (ISDN) - Fax 02
MANUALE PER L UTENTE ACCENTA CEN800 Ver. 1.0 Centrale Antifurto 8 zone a Microprocessore con tastiera di comando SICURIT Alarmitalia Spa Via Gadames 91 - MILANO (Italy) Tel. 02 38070.1 (ISDN) - Fax 02
Codifica: dal diagramma a blocchi al linguaggio C++
 Codifica: dal diagramma a blocchi al linguaggio C++ E necessario chiarire inizialmente alcuni concetti. La compilazione Il dispositivo del computer addetto all esecuzione dei programmi è la CPU La CPU
Codifica: dal diagramma a blocchi al linguaggio C++ E necessario chiarire inizialmente alcuni concetti. La compilazione Il dispositivo del computer addetto all esecuzione dei programmi è la CPU La CPU
Descrizione del protocollo
 EFA Automazione S.r.l.Serial Bridge 3 - Modbus RTU slave to Atlas Copco Power MACS (01 ITA).doc pag. 1 / 8 Descrizione del protocollo Sulla porta seriale collegata ad ATLAS COPCO vengono intercettate le
EFA Automazione S.r.l.Serial Bridge 3 - Modbus RTU slave to Atlas Copco Power MACS (01 ITA).doc pag. 1 / 8 Descrizione del protocollo Sulla porta seriale collegata ad ATLAS COPCO vengono intercettate le
4 3 4 = 4 x 10 2 + 3 x 10 1 + 4 x 10 0 aaa 10 2 10 1 10 0
 Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Rappresentazione dei numeri I numeri che siamo abituati ad utilizzare sono espressi utilizzando il sistema di numerazione decimale, che si chiama così perché utilizza 0 cifre (0,,2,3,4,5,6,7,8,9). Si dice
Shine Vision Manuale utente
 Shine Vision Manuale utente 1 Descrizione del prodotto Il sistema di monitoraggio Shine Vision è composto da un trasmettitore e da un ricevitore (schermo LCD) che permette la visualizzazione dei dati di
Shine Vision Manuale utente 1 Descrizione del prodotto Il sistema di monitoraggio Shine Vision è composto da un trasmettitore e da un ricevitore (schermo LCD) che permette la visualizzazione dei dati di
Laboratorio di Informatica
 per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
per chimica industriale e chimica applicata e ambientale LEZIONE 4 - parte II La memoria 1 La memoriaparametri di caratterizzazione Un dato dispositivo di memoria è caratterizzato da : velocità di accesso,
Arduino: domotica open source
 Arduino: domotica open source Emanuele Palazzetti Feedback: http://tinyurl.com/arduinold2011 1 Physical Computing Costruire dei sistemi fisici interattivi tramite l'uso di software e di hardware in grado
Arduino: domotica open source Emanuele Palazzetti Feedback: http://tinyurl.com/arduinold2011 1 Physical Computing Costruire dei sistemi fisici interattivi tramite l'uso di software e di hardware in grado
FPf per Windows 3.1. Guida all uso
 FPf per Windows 3.1 Guida all uso 3 Configurazione di una rete locale Versione 1.0 del 18/05/2004 Guida 03 ver 02.doc Pagina 1 Scenario di riferimento In figura è mostrata una possibile soluzione di rete
FPf per Windows 3.1 Guida all uso 3 Configurazione di una rete locale Versione 1.0 del 18/05/2004 Guida 03 ver 02.doc Pagina 1 Scenario di riferimento In figura è mostrata una possibile soluzione di rete
Informatica B a.a 2005/06 (Meccanici 4 squadra) PhD. Ing. Michele Folgheraiter
 PhD. Ing. Michele Folgheraiter") Informatica B a.a 2005/06 (Meccanici 4 squadra) Scaglione: da PO a ZZZZ PhD. Ing. Michele Folgheraiter Architettura del Calcolatore Macchina di von Neumann Il calcolatore moderno è basato su un architettura
Informatica B a.a 2005/06 (Meccanici 4 squadra) Scaglione: da PO a ZZZZ PhD. Ing. Michele Folgheraiter Architettura del Calcolatore Macchina di von Neumann Il calcolatore moderno è basato su un architettura
CONVERTITORE SERIALE ASINCRONO RS232/USB, TTL/USB e RS485/USB CONFIG BOX PLUS
 CONVERTITORE SERIALE ASINCRONO RS232/USB, TTL/USB e RS485/USB CONFIG BOX PLUS DESCRIZIONE GENERALE Il prodotto CONFIG BOX PLUS costituisce un convertitore in grado di realizzare una seriale asincrona di
CONVERTITORE SERIALE ASINCRONO RS232/USB, TTL/USB e RS485/USB CONFIG BOX PLUS DESCRIZIONE GENERALE Il prodotto CONFIG BOX PLUS costituisce un convertitore in grado di realizzare una seriale asincrona di
RC Defender. RC Defender. Importato da Skynet Italia s.r.l. Pag. 1
 RC Defender Importato da Skynet Italia s.r.l. Pag. 1 1) Introduzione Telecomando Intelligente Wireless PB-403R è un mini telecomando intelligente con 6 tasti, con la sua funzione di controllo dei dispositivi
RC Defender Importato da Skynet Italia s.r.l. Pag. 1 1) Introduzione Telecomando Intelligente Wireless PB-403R è un mini telecomando intelligente con 6 tasti, con la sua funzione di controllo dei dispositivi