ROBOCUP JR ITALIA 2012
|
|
|
- Marisa Bini
- 6 anni fa
- Visualizzazioni
Transcript
1 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda Aprile 1
2 DELLA SQUADRA X FIGHTERS ISTITUTO ITIS "DE PRETTO" DI SCHIO 2
3 La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica regolata dal D.P.R. 275/99 (art. 7) che permette alle scuole statali di operare sinergicamente per obiettivi condivisi e ritenuti importanti per l offerta formativa erogata all utenza. La Rete di scuole è nata sulla condivisione di una serie di principi EDUCATIVI e DIDATTICI riferiti alla realtà della scuola italiana. Questi principi e le conseguenti proposte operative erano stati riportati in un documento del maggio 2008 dal titolo: Manifesto per una RoboCupJr italiana - una proposta per la diffusione dell utilizzo didattico della Robotica nelle scuole a cura di Andrea Bonarini, Augusto Chioccariello e Giovanni Marcianò. Maggio 2008 L obiettivo della Rete organizzare l edizione italiana della Robocup Jr concretizza una spinta al confronto e alla collaborazione tra Istituti scolastici, elementi che motivano docenti e studenti all impegno nell innovazione, sia didattica che tecnologica, affrontando i problemi che costituiscono uno standard internazionale dal 2000, quando la Robocup (manifestazione riservata alle Università di tutto il mondo) ha proposto le tre gare per la scuola: Dance Rescue Soccer. 3
4 La Robocup Jr ITALIA è Una manifestazione nazionale fondata di tre punti forti: 1. una struttura che cura l organizzazione e gestisce gli aspetti di organizzazione, promozione, svolgimento ai diversi livelli, regionali e nazionali; 2. un contenuto condiviso, ovvero regolamenti, formule di gara, supporto formativo e informativo ai partecipanti; 3. una documentazione delle proposte didattiche e del lavoro degli studenti che coinvolgono l uso di kit o robot auto costruiti per la partecipazione agli eventi organizzati dalla Rete. Questo volumetto appartiene alla collana di documentazione. Sul piano organizzativo e gestionale della Rete di scuole lo Statuto prevederà organismi ben distinti ma fortemente integrati: COMITATO DI GESTIONE formato dai Dirigenti scolastici degli Istituti fondatori o associati alla Rete. Si riunisce due volte l anno in via ordinaria, e online per decisioni straordinarie. ISTITUTO CAPOFILA come previsto dal DPR 275/99 cura gli aspetti burocratici, amministrativi e contabili della Rete. Il Dirigente scolastico dell Istituto capofila è il legale rappresentante della Rete e provvede a dare esecuzione alle delibere del Comitato di Gestione. COMITATO TECNICO formato dai docenti referenti degli Istituti fondatori o associati alla Rete, provvede a definire il Bando e i Regolamenti di gara per la manifestazione annuale nazionale, trasmettendoli al Comitato di gestione che li deve approvare. 4
5 RICERCATORI ASSOCIATI portano nella Rete il loro contributo scientifico di alto livello. Partecipano di diritto al Gruppo Tecnico e un loro rappresentante al Comitato di Gestione (senza diritto di voto). ISTITUTI PARTECIPANTI iscrivendosi alle gare, beneficiano del supporto della Rete ma non partecipano alle decisioni gestionali o tecniche. La partecipazione alla gara nazionale li rende idonei per aderire alla Rete. Diversamente serve il parere del Comitato Tecnico. 5
6 Balestro Andrea Classe 5 AE X-FIGHTERS Partecipa alla gara di Rescue-B Istituto ITIS De Pretto di Schio 6
7 CAP. 1 DATI GENERALI Componenti della squadra: Balestro Andrea Istituto di provenienza: ITIS De Pretto di Schio(VI) Docenti responsabili: Giuseppe Tomiello Dario Marchiorato 7
8 CAP. 2 DATI DI CONTESTO E MOTIVAZIONE L'idea di partecipare alla Robocup nella competizione Rescue- B mi è stata proposta dal professore di sistemi e automazione G. Tomiello. Da subito ho iniziato ad apportare le modifiche necessarie sul robot autocostruito dell anno precedente affinché si adattasse alla competizione da svolgere. Nel corso di questo progetto molti problemi sono sorti ma sono stati in gran parte risolti anche grazie ai consigli e agli spunti dei nostri docenti e dei compagni di classe. Nei capitoli successivi verranno affrontati anche i vari problemi incontrati. 8
9 CAP. 3 STRUTTURA DEL ROBOT 9
10 Schema a blocchi del robot 10
11 Componenti principali del robot: - due motori per la movimentazione del robot stesso - tre sensori a ultrasuoni per verificare il posizionamento delle pareti - due sensori di temperatura per la ricerca delle vittime (le sorgenti di calore) - un sensore di luce per riconoscere se il robot entra in una zona nera - un encoder utilizzato per il calcolo del tragitto percorso e per realizzare le curve - un ampolla di mercurio per riconoscere se si trova nella salita o meno - due finecorsa posteriori per il raddrizzamento del robot nelle curve - un led ad alta luminosità per la segnalazione delle vittime 11
12 ROBOCUP JR ITALIA CAP. 4 MECCANICA Nella costruzione del robot ho cercato di mantenere delle dimensioni compatte e dare un certo ordine alle cose. Il primo punto riguarda lo spostamento all interno del labirinto; infatti più le dimensioni sono compatte meno durante il percorso nascono problemi di collisione e eventuale incastro con le pareti. Per quanto concerne il secondo punto un lavoro ordinato non porta alla confusione nel ricercare gli eventuali problemi. È stato scelto di montare i cingoli in quanto questi garantiscono una maggiore superficie d appoggio durante la salita e permettono di superare gli eventuali ostacoli sul percorso (es. detriti) con maggior facilità rispetto alle ruote. 12
 ed è possibile sviluppare in modo semplice e veloce le proprie applicazioni senza dover studiare linguaggi di programmazione troppo complessi.")
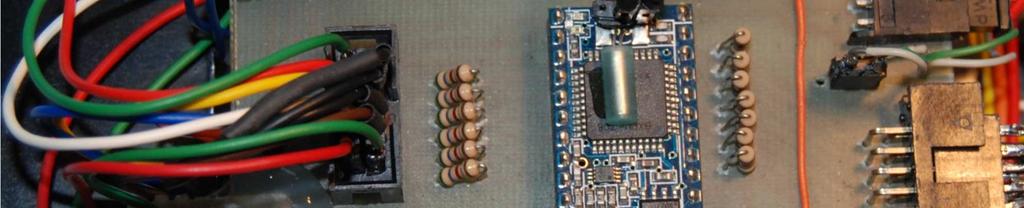
13 CAP. 5 UNITÀ DI CONTROLLO Il BasicX-24 è uno dei microcontrollori programmabili in linguaggio Basic più potenti al mondo. Ha dimensioni molto contenute (solo 34x17mm) ed è possibile sviluppare in modo semplice e veloce le proprie applicazioni senza dover studiare linguaggi di programmazione troppo complessi. Al suo interno alloggia un microcontroller Atmel AT90S8535, una memoria EEPROM da 32K, un quarzo ed un chip per la regolazione della tensione di alimentazione. Il microprocessore Atmel è già programmato per eseguire il codice operativo memorizzato sulla EEPROM. Il codice operativo viene generato dall'ambiente di sviluppo BasicX e trasferito nella EEPROM del modulo tramite un connettore seriale RS232. Questo microcontrollore è stato scelto per i seguenti motivi: - E programmabile in BasiX, un linguaggio molto simile a Visual Basic 6.0 studiato durante il corso degli studi. - Possiede un gran numero di ingressi/uscite (19 in tutto). - Ha tre canali PWM che possono gestire 13
14 indipendentemente tre motori. - Otto dei sedici ingressi possono essere usati come convertitori analogico digitali. 14

15 CAP. 6 SENSORI I sensori utilizzati per la realizzazione del robot, nel totale, sono nove: tre sensori a ultrasuoni, due sensori di temperatura, i finecorsa posteriori, l encoder di un dei due motori, l ampolla di mercurio e il sensore di luce. SENSORE ULTRASUONI I sensori utilizzati nel robot sono di due tipi: quello frontale è un SRF05, mentre i due laterali si trattano di due SRF04. L utilizzo di due sensori diversi è dovuto dal fatto che erano presenti a scuola questi due sensori e il funzionamento e le caratteristiche di entrambi i sensori si assomigliano. Costituiscono entrambi una versione semplificata ed economica del sonar, adatto per le applicazioni di piccole automazioni come in questo caso. Il sensore di prossimità SFR05 (come il sensore SRF04) è dotato di una coppia di trasduttori ceramici in grado di generare un segnale ad ultrasuoni a 40Khz e di ricevere l'eco prodotto da un ostacolo frontale fino ad una distanza di 5 metri e di tutta la circuiteria necessaria per 15
16 condizionare i segnali in modo da poter essere gestiti da un normale microprocessore. Il sonar è dotato di una sensibilità sufficiente a rilevare un ostacolo del diametro di 3 cm ad una distanza di 2 metri. Il principio di funzionamento è esattamente uguale a quello di tutti i sonar: le onde ultrasonore vengono emesse e grazie al tempo che impiegano a ritornare è possibile conoscere la distanza dell oggetto in questione. Un pregio di questi sensori che ho potuto constatare durante le prove è che le onde trasmesse dal sensore si propagano si in modo conico ma in modo molto direzionale, vale a dire che il cono è abbastanza stretto e perciò il sensore è meno influenzato da possibili oggetti che si trovano al di fuori del percorso. 16

17 SENSORE DI TEMPERATURA I sensori di temperatura utilizzati sono dei TPA81 collegati attraverso il bus I2C. Essi rilevano il calore attraverso i sensori a infrarossi e nel campo della robotica sono in grado di rilevare e misurare la temperatura di una fonte di calore statica. Il TPA81 è in grado di rilevare la temperatura della fiamma di una candela ad una distanza di 2 metri e non è influenzato dalla luce dell ambiente in cui si trova. Inoltre può misurare la temperatura di 8 punti adiacenti contemporaneamente. L idea iniziale è stata di montare un unico sensore di temperatura rivolto verso il senso di marcia, immaginando che questo riuscisse a rilevare la temperatura delle fonti di calore anche ai lati; ma eseguendo un test mi sono accorto che il sensore è anch esso molto unidirezionale ed è in grado di rilevare la temperatura solo se la sorgente di calore si trova in linea con il sensore. 17
18 ROBOCUP JR ITALIA 18
19 FINECORSA POSTERIORI I finecorsa posteriori sono stati posizionati per il raddrizzamento del robot nelle curve. Infatti la rotazione del robot dipende molto dalla ruvidità della superficie su cui si trova. Ho notato, nelle prove, che nelle superfici più lisce il robot è in grado di compiere una rotazione di 90 o 180 gradi molto facilmente, mentre quando la superficie è molto ruvida tende a non completare la curva e conseguentemente ripartendo va a sbattere contro le pareti. In prima battuta ho pensato, nei casi in cui fosse possibile, di far arretrare il robot per un certo tempo dopo aver fatto l curva, in modo che questo si potesse raddrizzare e infine riposizionarsi al centro del modulo. Il problema è sorto nel momento in cui il tempo impostato per la retromarcia non era necessario quando compiva 19
20 curve sbagliate, cioè molto inferiori a 90 gradi, ma al tempo stesso era un tempo troppo lungo nel momento in cui la curva di 90 gradi era stata eseguita perfettamente. Da qui l idea di posizionare sul retro del robot due finecorsa collegati in serie fra loro. Nel momento in cui entrambi sono premuti al microprocessore viene inviato un segnale di tipo High (5 Volt), che verrà poi interpretato dal programma. 20

21 ENCODER ROBOCUP JR ITALIA L encoder utilizzato è integrato con i motori utilizzati per la movimentazione. Questi interruttori ad effetto Hall, sono sensori altamente stabili termicamente e resistenti alle sollecitazioni meccaniche; sono maggiormente utilizzati in applicazioni dove il campo magnetico varia rapidamente e il valore di campo residuo è basso. Ciascun dispositivo include un regolatore di tensione, un generatore di Hall, un circuito stabilizzatore di temperatura, un amplificatore di segnale stabilizzato a chopper, un comparatore di Schmitt ed un mosfet a drain aperto, compresi su di un solo "chip" di silicio. Il regolatore di tensione permette di alimentare il dispositivo con tensione compresa tra 3,5 e 24V. Il mosfet di uscita può sopportare correnti di 20mA massimo. Per questo progetto l encoder è utilizzato per il calcolo della distanza percorsa: infatti il robot è programmato per percorrere 30 cm alla volta (il che equivale a spostarsi di cella in cella) facendo si che si riesca a capire in quale cella si trovi. Inoltre l encoder viene utilizzato per compiere le rotazioni di 90 e 180 gradi. Il segnale di uscita dall encoder è un picco di ampiezza pari a circa 20 21



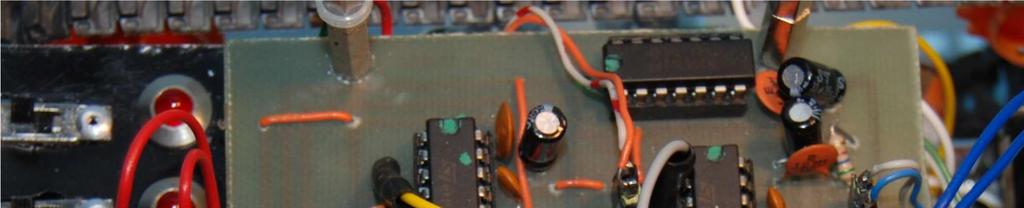
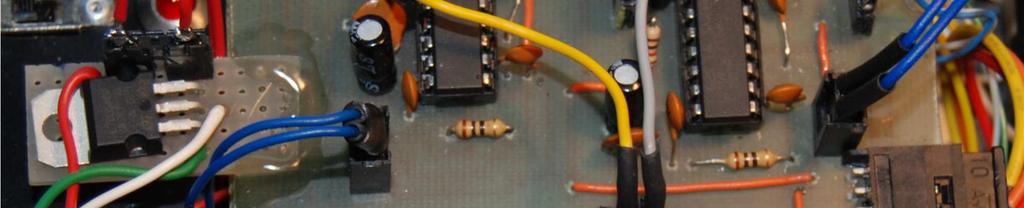
22 ma. Si tratta di un segnale troppo piccolo perché possa essere rilevato dal microprocessore, pertanto è stato realizzato un circuito elettronico per l amplificazione del segnale e conseguente squadratura. Sono stati utilizzati due amplificatori operazionali (µa741), il primo in configurazione di amplificatore invertente (il segnale dell encoder è negativo), il secondo in configurazione di comparatore a una soglia. L alimentazione scelta per gli operazionali è quella dei 0-12 Volt, in quanto alimentandoli a 0-5 Volt non essendo il comparatore a una soglia ideale, non raggiunge i 5 Volt e ciò compromette la lettura da parte del microprocessore. Utilizzando però l alimentazione 0-12 Volt è necessario che il segnale in uscita venga dimezzato, in quanto gli ingressi digitali dl microprocessore ammettono una tensione massima in ingresso di 5 Volt. È stato per cui fatto un partitore di tensione con due resistenze di valore uguale. Di seguito è riportato lo schema elettrico e la realizzazione su scheda. 22





23 23





.")
24 ROBOCUP JR ITALIA AMPOLLA DI MERCURIO L ampolla di mercurio è stata montata per far si che durante la salita al piano superiore entri in funzione il sottoprogramma dedicato alla rampa. Questo infatti mantiene sotto controllo la distanza delle pareti laterali e corregge la rotta nel caso in cui il robot tenda ad andare verso destra o sinistra. È stato scelto di montare l ampolla di mercurio perché durante le prove il robot tendeva a andare verso destra a causa anche dello slittamento dei cingoli. L ampolla di mercurio è montata su una staffa che permette di regolarne l inclinazione in modo tale da far si che si trovi nella situazione più ottimale possibile ( come è possibile vedere nel particolare). L ampolla di mercurio possiede tre contatti: un comune e, visto il modo in cui è montata sul robot, un contatto normalmente chiuso e uno normalmente aperto. Il contato comune è quello che comunica con il microprocessore; 24
25 esso può trasmettere un segnale di 0 Volt attraverso il normalmente chiuso (in quanto collegato a massa) o un segnale di 5 Volt attraverso il normalmente aperto (che è collegato ai 5 Volt forniti da un 7805). La scelta di avere 0 Volt con il normalmente chiuso, anziché lasciare il contatto libero è nata dal fatto che per qualche disturbo il microprocessore rilevi un segnale alto anche se in realtà il robot non si trova sulla rampa. 25




26 SENSORE DI LUCE Il sensore di luce utilizzato è completamente autocostruito. Si tratta della combinazione di un led ad alta luminosità di colore rosso abbinato a una fotoresistenza. Il led emette luce la quale viene proiettata sulla superficie del pavimento e riflessa. In base alla quantità di luce che ritorna la fotoresistenza varia e di conseguenza la tensione ai suoi capi, in quanto fa parte di un partitore di tensione. La seconda resistenza è stata calcolata in modo tale da aver la maggior escursione di tensione tra zona bianca e zona nera. Il led è stato ricoperto da un tubetto nero per proiettare la luce esclusivamente sul pavimento, altrimenti la vicinanza del led alla fotoresistenza avrebbe alterato la lettura. Il sensore di luce è stato posizionato il più avanti possibile in modo da rilevare la zona nera senza che il robot sia avanzato eccessivamente. 26


27 CAP. 6 MOTORI Per far muovere il robot sono stati usati due motoriduttori della serie L V DC, con rapporto di riduzione 43:1, dotato di soppressore disturbi con VDR sul collettore, direzione di rotazione secondo polarità. Particolarmente indicato per la realizzazione di Robot. Sono stati scelti i motori in DC perché la sorgente di alimentazione è in DC oltre al fatto che il vantaggio dato dall uso di questi motori e che forniscono coppie di spunto elevate. I motoriduttori sono stati collegati con il microprocessore BX24 tramite un integrato L6202, il quale funge da ponte H. Dal microprocessore vengono mandati due segnali, uno che abilità il motore indicando la 27
28 velocità angolare(da 0 a 100), ossia attraverso il PWM, mentre il secondo segnale indica la direzione (Orario o Antiorario / True o False). SPEIFICHE TECNICHE: Tensione nominale: 12 Vdc Rapporto di riduzione: 43,3:1 Coppia: 3,8 Ncm Velocità: 40 rpm Velocità senza carico: 60 rpm Consumo: 50 ma Consumo senza carico: < 20 ma Lunghezza: 41 mm (L) Diametro esterno: 27 mm Peso: circa 55 g 28

29 CAP. 8 AMBIENTE DI SVILUPPO L'ambiente di sviluppo utilizzato per programmare il microprocessore BX 24 è il Basic X, un ambiente molto simile a quello di Visual Basic della Microsoft da noi studiato durante il secondo anno del corso di elettrotecnica. Questo ambiente appartiene infatti alla famiglia Basic, tanto che è possibile un facile trasferimento di funzioni e moduli da Visual Basic a Basic X, e questo mi ha agevolato notevolmente l'approccio su questo nuovo ambiente di sviluppo. 29
30 Uno degli aspetti più interessanti del modulo BX24 e dell'ambiente di programmazione BasicX è la notevole disponibilità di librerie di sistema già pronte per effettuare funzioni anche a bassissimo livello. Il programma è stato sviluppato per la maggior parte del tempo a casa, mentre nelle ore di scuola ho dedicato il tempo per le prove e le modifiche tecniche del robot. 30
31 CAP. 9 IL PROGRAMMA A SOFTWARE Il programma principale permette al robot di muoversi all interno del labirinto; funge, per così dire, da cervello mentre delega a altri sottoprogrammi le varie operazioni, quali ad esempio la rotazione del robot, interrogare i vari sensori, controllare se si trova sulla rampa, se è all interno di un vicolo cieco, ecc. Inizialmente avevo pensato di far muovere il robot senza alcuna interruzione fino a che non incontrava un muro frontale. Nel frattempo il robot interrogava i vari ultrasuoni e teneva in memoria le varie celle in cui era stato. Tutto questo ha funzionato fintanto che il programma è rimasto semplice e con poche funzioni. In una prova con un programma più complesso i problemi relativi a questa scelta di software si sono mostrati. Per cui ho scelto una via che impegnasse meno il microprocessore ma che potesse ottenere gli stessi risultati. L idea di fondo del programma è di far muovere il robot di 30 cm alla volta, cioè la distanza necessaria affinché il robot si sposti da una cella a quella successiva. Una volta che il robot ha compiuto questo spostamento si ferma, stabilisce la nuova posizione (grazie anche all utilizzo di una bussola fittizia), interroga gli ultrasuoni, mappa (cioè salva la posizione in cui si trova) e decide la prossima azione da compiere in base a come sono posizionati le pareti e anche all orientamento del robot. Di seguito vengono riportati degli esempi di sottoprogrammi presenti nel software. 31
32 L esempio qui riportato è il sottoprogramma scritto in BasicX che gestisce la rotazione del robot. Private Sub TurnRobot(ByVal Dx As Byte, ByVal Sx As Byte, ByVal Reverse As Byte) Dim NuovaBussola as String impongo Count = 0; è la variabile che serve per il conteggio degli impulsi dell encoder Count = 0 controllo se ho chiesto di compiere una rotazione verso destra If ((Dx = 1) And (Sx = 0) And (Reverse = 0)) Then inizio un ciclo Do-While che termina nel momento in cui il conteggio supera il valore che ho settato per la rotazione di 90 gradi Do incremento il valore di Count attraverso la funzione di libreria CountTransitions, la quale conta gli impulsi al pin designato in un certo intervallo di tempo Count = Count + CountTransitions(EncoderPin, TimeInterval) impongo un DutyCycle = 1.0 e setto il pin che gestisce la marcia dei motori alto per il motore sinistro (equivale a dire che il motore procede in avanti), basso per il motore destro (cioè procede all indietro) DutyCycle = 1.0 Call PutPin(MarciaSx, bxoutputhigh) Call PutPin(MarciaDx, bxoutputlow) Call PutPinPWM(PWMDX, DutyCycle) Call PutPinPWM(PWMSX, DutyCycle) Loop While (Count < Count90) fermo i motori imponendo un DutyCycle = 0.1 e risetto i pin che gestiscono la marcia dei motori entrambi alti, cioè pronti a muoversi in avanti DutyCycle = 0.1 Call PutPin(MarciaSx, bxoutputhigh) Call PutPin(MarciaDx, bxoutputhigh) Call PutPinPWM(PWMDX, DutyCycle) 32
33 Call PutPinPWM(PWMSX, DutyCycle) controllo il nuovo orientamento del robot con la bussola fittizia If (Bussola = "N") Then NuovaBussola = "E" End If If (Bussola = "E") Then NuovaBussola = "S" End If If (Bussola = "S") Then NuovaBussola = "W" End If If (Bussola = "W") Then NuovaBussola = "N" End If Call Delay(0.1) End If controllo se ho chiesto di compiere una rotazione verso sinistra If ((Dx = 0) And (Sx = 1) And (Reverse = 0)) Then inizio un ciclo Do-While che termina nel momento in cui il conteggio supera il valore che ho settato per la rotazione di 90 gradi Do incremento il valore di Count attraverso la funzione di libreria CountTransitions, la quale conta gli impulsi al pin designato in un certo intervallo di tempo Count = Count + CountTransitions(EncoderPin, TimeInterval) impongo un DutyCycle = 1.0 e setto il pin che gestisce la marcia dei motori alto per il motore destro (equivale a dire che il motore procede in avanti), basso per il motore sinistro (cioè procede all indietro) DutyCycle = 1.0 Call PutPin(MarciaSx, bxoutputlow) Call PutPin(MarciaDx, bxoutputhigh) Call PutPinPWM(PWMDX, DutyCycle) Call PutPinPWM(PWMSX, DutyCycle) Loop While (Count < Count90) 33
34 fermo i motori imponendo un DutyCycle = 0.1 e risetto i pin che gestiscono la marcia dei motori entrambi alti, cioè pronti a muoversi in avanti DutyCycle = 0.1 Call PutPin(MarciaSx, bxoutputhigh) Call PutPin(MarciaDx, bxoutputhigh) Call PutPinPWM(PWMDX, DutyCycle) Call PutPinPWM(PWMSX, DutyCycle) controllo il nuovo orientamento del robot con la bussola fittizia If (Bussola = "N") Then NuovaBussola = "W" End If If (Bussola = "E") Then NuovaBussola = "N" End If If (Bussola = "S") Then NuovaBussola = "E" End If If (Bussola = "W") Then NuovaBussola = "S" End If Call Delay(0.1) End If controllo se ho chiesto di compiere una rotazione di 180 gradi If ((Dx = 0) And (Sx = 0) And (Reverse = 1)) Then inizio un ciclo Do-While che termina nel momento in cui il conteggio supera il valore che ho settato per la rotazione di 180 gradi Do incremento il valore di Count attraverso la funzione di libreria CountTransitions, la quale conta gli impulsi al pin designato in un certo intervallo di tempo Count = Count + CountTransitions(EncoderPin, TimeInterval) impongo un DutyCycle = 1.0 e setto il pin che gestisce la marcia dei motori alto per il motore destro (equivale a dire che il motore 34
35 procede in avanti), basso per il motore sinistro (cioè procede all indietro) DutyCycle = 1.0 Call PutPin(MarciaSx, bxoutputlow) Call PutPin(MarciaDx, bxoutputhigh) Call PutPinPWM(PWMDX, DutyCycle) Call PutPinPWM(PWMSX, DutyCycle) Loop While (Count < Count180) fermo i motori imponendo un DutyCycle = 0.1 e risetto i pin che gestiscono la marcia dei motori entrambi alti, cioè pronti a muoversi in avanti DutyCycle = 0.1 Call PutPin(MarciaSx, bxoutputhigh) Call PutPin(MarciaDx, bxoutputhigh) Call PutPinPWM(PWMDX, DutyCycle) Call PutPinPWM(PWMSX, DutyCycle) controllo il nuovo orientamento del robot con la bussola fittizia If (Bussola = "N") Then NuovaBussola = "S" End If If (Bussola = "E") Then NuovaBussola = "W" End If If (Bussola = "S") Then NuovaBussola = "N" End If If (Bussola = "W") Then NuovaBussola = "E" End If Call Delay(0.1) End If risetto Count = 0 Count = 0 impongo Bussola = NuovaBussola; questo perché se avessi modificato direttamente Bussola una volta uscita da un confronto 35
36 sarebbe entrato in quello successivo perché la condizione si verificava nuovamente Bussola = NuovaBussola End Sub Il secondo esempio riportato è quello relativo al sottoprogramma relativo al raddrizzamento del robot nelle curve (quando questo è possibile), sempre scritto nel linguaggio di programmazione BasicX. Private Sub Azzeramento() setto i pin che gestiscono la marcia dei motori entrambi bassi, cioè pronti a muoversi indietro Call PutPin(MarciaDx,bxOutputLow) Call PutPin(MarciaSx,bxOutputLow) inizio un ciclo Do-While che termina nel momento in cui entrambi i finecorsa posteriori sono premuti, ossia quando sono appoggiato completamente alla parete Do DutyCycle = 1.0 Call PutPinPWM(PWMDX,DutyCycle) Call PutPinPWM(PWMSX,DutyCycle) rilevo il segnale che viene mandato dai finecorsa posteriori; 0 = non sono premuti, 1 = sono premuti RetroTouch = GetPin(TouchPin) Loop While(RetroTouch = 0) risetto i pin che gestiscono la marcia dei motori entrambi alti, cioè pronti a muoversi in avanti Call PutPin(MarciaDx,bxOutputHigh) Call PutPin(MarciaSx,bxOutputHigh) impongo la variabile di conteggio Count = 0 Count = 0 inizio un ciclo Do-While che termina nel momento in cui il robot si è centrato all interno della cella Do Count = Count + CountTransitions(EncoderPin,TimeInterval) 36
37 DutyCycle = 1.0 Call PutPinPWM(PWMDX,DutyCycle) Call PutPinPWM(PWMSX,DutyCycle) Loop While(Count < CountCenter) fermo i motori imponendo un DutyCycle = 0.1 DutyCycle = 0.1 Call PutPinPWM(PWMDX,DutyCycle) Call PutPinPWM(PWMSX,DutyCycle) End Sub 37




38 CAP. 10 fonte DI ALIMENTAZIONE L alimentazione è fornita da 10 batterie ricaricabili AA di tensione 1.2 Volt e corrente i 2.7Ah. Dal pacco batterie sono stati ricavati i 5 Volt per l alimentazione dell elettronica e i 12 Volt per i motori. 38
39 indice Cap. 1 Dati generali Pag.7 Cap. 2 Dati di contesto e motivazione Pag.8 Cap. 3 Struttura del robot Pag.9 Cap. 4 Meccanica Pag.12 Cap. 5 Unità di controllo Pag.13 Cap. 6 Sensori Pag.15 Cap. 7 Motori Pag.27 Cap. 8 Ambiente di sviluppo Pag.29 Cap. 9 Il programma software Pag.31 Cap. 10 Fonte di alimentazione Pag.38 39
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Squadra: TEXAS BOT Istituto: ITIS A.ROSSI La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Squadra: TEXAS BOT Istituto: ITIS A.ROSSI La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica
ROBOCUP JR ITALIA RIVA DEL GARDA
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
ROBOCUP JR ITALIA 2011
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Report di documentazione delle squadre FerrariSusa_8 FerrariSusa_9 FerrariSusa_10 Istituto Enzo FERRARI di Susa (TO)
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile Report di documentazione delle squadre FerrariSusa_8 FerrariSusa_9 FerrariSusa_10 Istituto Enzo FERRARI di Susa (TO)
ROBOCUP JR ITALIA Riva del Garda aprile
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Report di documentazione delle squadre FerrariSusa_11 FerrariSusa_12 FerrariSusa_13 Istituto Enzo FERRARI di Susa
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda 19-21 aprile Report di documentazione delle squadre FerrariSusa_11 FerrariSusa_12 FerrariSusa_13 Istituto Enzo FERRARI di Susa
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi)
") IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
IL PROGETTO «TELECOMANDO» (sensore ad infrarossi) UTILIZZO DEI SENSORI AD INFRAROSSI Questi sensori, montati sul robot, sono usati per: - rilevare una linea sul pavimento - rilevare il bordo di un tavolo
CHI SIAMO.
 CHI SIAMO La Rete di scuole per la Robocup Jr ITALIA è nata nel novembre 2008 come espressione dell Autonomia scolastica (D.P.R. 275/99) che prevede che le scuole statali possano operare sinergicamente
CHI SIAMO La Rete di scuole per la Robocup Jr ITALIA è nata nel novembre 2008 come espressione dell Autonomia scolastica (D.P.R. 275/99) che prevede che le scuole statali possano operare sinergicamente
A1.2 - Utilizzare programmi applicativi per il monitoraggio ed il collaudo di sistemi elettronici.
 Programma effettivamente svolto Sez.D COMPETENZE (da linee guida DPR 15/03/2010, art. 8 comma 3 e direttiva 4 del 16 gennaio 2012) K1 - utilizzare la strumentazione di laboratorio e di settore e applicare
Programma effettivamente svolto Sez.D COMPETENZE (da linee guida DPR 15/03/2010, art. 8 comma 3 e direttiva 4 del 16 gennaio 2012) K1 - utilizzare la strumentazione di laboratorio e di settore e applicare
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) ANNO SCOLASTICO 2005/2006 CORSO SPERIMENTALE LICEO TECNICO
 ANNO SCOLASTICO 2005/2006 CORSO SPERIMENTALE LICEO TECNICO") ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 2-56025 PONTEDERA (PI) 0587 53566/55390 - Fax: 0587 57411 - : iti@marconipontedera.it - Sito WEB: www.marconipontedera.it ANNO SCOLASTICO
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 2-56025 PONTEDERA (PI) 0587 53566/55390 - Fax: 0587 57411 - : iti@marconipontedera.it - Sito WEB: www.marconipontedera.it ANNO SCOLASTICO
Macchinina evita ostacoli Arduino
 Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
Macchinina evita ostacoli Arduino Sviluppo di una macchina autonoma in grado di evitare gli ostacoli sul suo percorso. Introduzione In questo progetto abbiamo realizzato una macchinina in grado di muoversi
ROBOCUP JUNIOR. CATANIA, Aprile SenigalliaRobot. A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni
 ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
Le misure di tempo e frequenza
 Le misure di tempo e frequenza Le misure di tempo e frequenza costituiscono un importante branca delle misure elettriche ed elettroniche ed in generale delle misure di grandezze fisiche. E possibile raggiungere
Le misure di tempo e frequenza Le misure di tempo e frequenza costituiscono un importante branca delle misure elettriche ed elettroniche ed in generale delle misure di grandezze fisiche. E possibile raggiungere
Ricevitore Supervisionato RX-24
 Ricevitore Supervisionato RX-24 Dati tecnici Gestione a microprocessore 24 Sensori memorizzabili 8 Uscite allarme uno per canale 8 Canali con 3 sensori per ogni canale 10 Telecomandi programmabili 1 Uscita
Ricevitore Supervisionato RX-24 Dati tecnici Gestione a microprocessore 24 Sensori memorizzabili 8 Uscite allarme uno per canale 8 Canali con 3 sensori per ogni canale 10 Telecomandi programmabili 1 Uscita
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo
 Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
Macchina con Arduino Uno comandata tramite dispositivo Android e sensore ultrasuoni per fermarsi istantaneamente di fronte ad un ostacolo Progetto di fine anno Gruppo C, A.S 2015/2016 Realizzato da Classe:
Termometro digitale. Ivancich Stefano
 Termometro digitale Ivancich Stefano 11 Gennaio 2015 SOMMARIO Di seguito si illustra il progetto di un termometro digitale. Il progetto è molto utile per capire il funzionamento delle dinamiche interne
Termometro digitale Ivancich Stefano 11 Gennaio 2015 SOMMARIO Di seguito si illustra il progetto di un termometro digitale. Il progetto è molto utile per capire il funzionamento delle dinamiche interne
RILEVATORE DI FIAMMA MOD. GL 91A/µp/M
 RILEVATORE DI FIAMMA MOD. GL 91A/µp/M Manuale-GL91A_mp-R4.doc pag.1 di 10 . Specifica rivelatore di fiamma GL91A/µP INDICE 1. Scopo pag. 3 2. Costruzione pag. 3 2.1 Meccanica 2.2 Elettronica pag. 4 3.
RILEVATORE DI FIAMMA MOD. GL 91A/µp/M Manuale-GL91A_mp-R4.doc pag.1 di 10 . Specifica rivelatore di fiamma GL91A/µP INDICE 1. Scopo pag. 3 2. Costruzione pag. 3 2.1 Meccanica 2.2 Elettronica pag. 4 3.
RILEVATORE DI MOVIMENTO Art
 RILEVATORE DI MOVIMENTO Art. 0981 950 316 Specifiche: 1. Tensione 220-240V/50Hz 2. Carico luminoso: 1000 W ad incandescenza 3. Range di lettura: regolabile da 6 a 12 metri 4. Angolo di rilevamento: 240
RILEVATORE DI MOVIMENTO Art. 0981 950 316 Specifiche: 1. Tensione 220-240V/50Hz 2. Carico luminoso: 1000 W ad incandescenza 3. Range di lettura: regolabile da 6 a 12 metri 4. Angolo di rilevamento: 240
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5. PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
Ministero dell Istruzione dell Università e della Ricerca M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE
 Pag. 1/1 Sessione ordinaria 2011 Seconda prova scritta Ministero dell Istruzione dell Università e della Ricerca M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTRONICA
Pag. 1/1 Sessione ordinaria 2011 Seconda prova scritta Ministero dell Istruzione dell Università e della Ricerca M320 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE CORSO DI ORDINAMENTO Indirizzo: ELETTRONICA
Motori Motore passo-passo Stadio di potenza PWM Sincrono Stadio di potenza del motore passopasso. Blocchi funzionali. Set point e generatore PWM
 RC1 Blocchi funzionai Motori a corrente continua Generatori Circuiti per il controllo dei motori in CC Motori a corrente alternata Circuiti per il controllo dei motori in CA Motori passo-passo Circuiti
RC1 Blocchi funzionai Motori a corrente continua Generatori Circuiti per il controllo dei motori in CC Motori a corrente alternata Circuiti per il controllo dei motori in CA Motori passo-passo Circuiti
INSEGUITORE SOLARE CON ARDUINO. Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3.
 INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
ITIS H. HERTZ A.S. 2009/2010 Classe IV Corso Serale - Progetto Sirio Programmazione preventiva del Corso di ELETTRONICA
 ITIS H. HERTZ A.S. 2009/2010 Classe IV Corso Serale - Progetto Sirio Programmazione preventiva del Corso di ELETTRONICA OBIETTIVI FORMATIVI GENERALI DELLA DISCIPLINA L allievo deve essere in grado di:
ITIS H. HERTZ A.S. 2009/2010 Classe IV Corso Serale - Progetto Sirio Programmazione preventiva del Corso di ELETTRONICA OBIETTIVI FORMATIVI GENERALI DELLA DISCIPLINA L allievo deve essere in grado di:
FREQUENZIMETRO FQ-16S3-800
 FREQUENZIMETRO FQ-16S3-800 By Tecnovolt (tecnovolt.altervista.org) MANUALE UTENTE Frequenzimetro FQ-16S3-800 - tecnovolt.altervista.org 1 INDICE 1 - Introduzione pag. 3 2 - Collegamento e prima accensione
FREQUENZIMETRO FQ-16S3-800 By Tecnovolt (tecnovolt.altervista.org) MANUALE UTENTE Frequenzimetro FQ-16S3-800 - tecnovolt.altervista.org 1 INDICE 1 - Introduzione pag. 3 2 - Collegamento e prima accensione
Misure di livello con sensori di prossimità Sonar SIMATIC PXS
 Misure di livello con sensori di prossimità Sonar SIMATIC PXS Nel misurare il livello di riempimento di un contenitore è spesso necessario determinare l altezza che assume il materiale sfuso o il liquido
Misure di livello con sensori di prossimità Sonar SIMATIC PXS Nel misurare il livello di riempimento di un contenitore è spesso necessario determinare l altezza che assume il materiale sfuso o il liquido
Progetto di Informatica Industriale GIRASOLE Andrea Controzzi
 Progetto di Informatica Industriale GIRASOLE Andrea Controzzi Introduzione 1 L'energia solare è una fonte di energia pulita la cui importanza è in continua crescita. I costi per metro quadro sono ancora
Progetto di Informatica Industriale GIRASOLE Andrea Controzzi Introduzione 1 L'energia solare è una fonte di energia pulita la cui importanza è in continua crescita. I costi per metro quadro sono ancora
EEPROM SERIALI IN I2C BUS.
 Corso di BASCOM 8051 - (Capitolo 3 0 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. EEPROM SERIALI IN I2C BUS. Tra i dispositivi più utilizzati, nelle applicazioni
Corso di BASCOM 8051 - (Capitolo 3 0 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. EEPROM SERIALI IN I2C BUS. Tra i dispositivi più utilizzati, nelle applicazioni
Classe IV specializzazione elettronica. Elettrotecnica ed elettronica
 Macro unità n 1 Classe IV specializzazione elettronica Elettrotecnica ed elettronica Reti elettriche, segnali e diodi Leggi fondamentali: legge di Ohm, principi di Kirchhoff, teorema della sovrapposizione
Macro unità n 1 Classe IV specializzazione elettronica Elettrotecnica ed elettronica Reti elettriche, segnali e diodi Leggi fondamentali: legge di Ohm, principi di Kirchhoff, teorema della sovrapposizione
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como MICROCONTROLLORE
 Microcontrollori MICROCONTROLLORE I Microcontrollori (MCU: MicroController Unit) sono dispositivi integrati su un singolo chip, che interagiscono direttamente col mondo esterno, grazie a un programma residente.
Microcontrollori MICROCONTROLLORE I Microcontrollori (MCU: MicroController Unit) sono dispositivi integrati su un singolo chip, che interagiscono direttamente col mondo esterno, grazie a un programma residente.
PWM 30 A. Disclaimer. Precauzioni di sicurezza
 1 PWM 30 A Disclaimer Quando acquisti questo dispositivo, vieni ritenuto responsabile per eventuali danni che possono verificarsi durante l'installazione o il funzionamento. Il produttore o il venditore
1 PWM 30 A Disclaimer Quando acquisti questo dispositivo, vieni ritenuto responsabile per eventuali danni che possono verificarsi durante l'installazione o il funzionamento. Il produttore o il venditore
Camar Elettronica s.r.l. Via Mulini Esterna n CARPI (Modena) ITALY. 2 Temperature Pt100 - Collegamento 3 fili
 ITALY. 2 Temperature Pt100 - Collegamento 3 fili") CM88-2R Microprocessore con 2 ingressi a Pt100 Il CM88-2R è uno strumento a microprocessore multicanale che accetta al suo ingresso 2 sonde a Pt100. La logica di funzionamento dello strumento è personalizzabile
CM88-2R Microprocessore con 2 ingressi a Pt100 Il CM88-2R è uno strumento a microprocessore multicanale che accetta al suo ingresso 2 sonde a Pt100. La logica di funzionamento dello strumento è personalizzabile
Generatore. Generatore. Un sistema a raggi-x consiste di: Tubo a raggi-x. Sistema di rilevazione
 Generatore Un sistema a raggi-x consiste di: Tubo a raggi-x Sistema di rilevazione Generatore Il generatore trasferisce la potenza elettrica P (KW) al tubo a raggi-x I parametri U (KV) e I (ma) vengono
Generatore Un sistema a raggi-x consiste di: Tubo a raggi-x Sistema di rilevazione Generatore Il generatore trasferisce la potenza elettrica P (KW) al tubo a raggi-x I parametri U (KV) e I (ma) vengono
RELAZIONE. Descrizione dell apparato sperimentale, materiale utilizzato, altre caratteristiche specifiche
 RELAZIONE Titolo Esperimento ROVER SU PANDORA Introduzione e Descrizione del fenomeno illustrato Il nostro team ha progettato e costruito un rover (denominato PLUTO) che ha come obiettivo lo studio delle
RELAZIONE Titolo Esperimento ROVER SU PANDORA Introduzione e Descrizione del fenomeno illustrato Il nostro team ha progettato e costruito un rover (denominato PLUTO) che ha come obiettivo lo studio delle
Convertitori Tensione / Frequenza. Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO)
") Convertitori Tensione / Frequenza Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) I convertitori tensione-frequenza (VFC: voltage to frequency converter) sono circuiti elettronici che forniscono
Convertitori Tensione / Frequenza Author: Ing. Sebastiano Giannitto (ITIS M.BARTOLO PACHINO) I convertitori tensione-frequenza (VFC: voltage to frequency converter) sono circuiti elettronici che forniscono
Per sistema di acquisizione dati, si deve intendere qualsiasi sistema in grado di rilevare e memorizzare grandezze analogiche e/o digitali.
 Sistema di acquisizione e distribuzione dati Per sistema di acquisizione dati, si deve intendere qualsiasi sistema in grado di rilevare e memorizzare grandezze analogiche e/o digitali. Consiste nell inviare
Sistema di acquisizione e distribuzione dati Per sistema di acquisizione dati, si deve intendere qualsiasi sistema in grado di rilevare e memorizzare grandezze analogiche e/o digitali. Consiste nell inviare
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra THE ENDLESS RUNNER Istituto ITT G. Chilesotti La Rete di scuole per
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra THE ENDLESS RUNNER Istituto ITT G. Chilesotti La Rete di scuole per
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA
 PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA") PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
S E R V O M O T O R I ( 2 )
") Corso di BASCOM 8051 - (Capitolo 2 6 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. S E R V O M O T O R I ( 2 ) Un Servomotore è un organo meccanico di potenza, in
Corso di BASCOM 8051 - (Capitolo 2 6 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. S E R V O M O T O R I ( 2 ) Un Servomotore è un organo meccanico di potenza, in
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
Comprendere il funzionamento dei convertitori Saper effettuare misure di collaudo
 SCH 35 Convertitore A/D Obiettivi Comprendere il funzionamento dei convertitori Saper effettuare misure di collaudo Strumenti e componenti IC1 LM 35 IC2 LM 158 IC3 ADC 0804 IC4 74LS244 R 1 = 75 Ω R 2 =
SCH 35 Convertitore A/D Obiettivi Comprendere il funzionamento dei convertitori Saper effettuare misure di collaudo Strumenti e componenti IC1 LM 35 IC2 LM 158 IC3 ADC 0804 IC4 74LS244 R 1 = 75 Ω R 2 =
ROBOCUP JR ITALIA 2015
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E.
 A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Caratteristiche
A.S. 2015/16 CLASSE 5 AEE MATERIA: LABORATORIO DI T.P.S.E. UNITA DI APPRENDIMENTO 1: AMPLIFICATORI OPERAZIONALI Essere capace di progettare le principali configurazioni circuitali con op-amp. Caratteristiche
Descrizione caratteristiche cilindri elettrici serie ECC+
 Descrizione caratteristiche cilindri elettrici serie ECC+ Tipologie e potenzialità nuovo cilindro elettrico in cc 12/24V della famiglia EASY tipo ECC + Caratteristiche generali del sistema: Alimentazione
Descrizione caratteristiche cilindri elettrici serie ECC+ Tipologie e potenzialità nuovo cilindro elettrico in cc 12/24V della famiglia EASY tipo ECC + Caratteristiche generali del sistema: Alimentazione
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Sistema SRT - Unita centrale di raccolta dati
 Sistema SRT - Unita centrale di raccolta dati L unità di ricezione dati da antenne remote permette di raccogliere i dati letti da tali antenne. È possibile collegare fino 16 antenne poste ad una distanza
Sistema SRT - Unita centrale di raccolta dati L unità di ricezione dati da antenne remote permette di raccogliere i dati letti da tali antenne. È possibile collegare fino 16 antenne poste ad una distanza
..a cura di Cammisuli Chiara
 I ISTITUTO D ISTRUZIONE SUPERIORE Michelangelo Bartolo di PACHINO..a cura di Cammisuli Chiara Il radiocomando è un dispositivo utilizzato per comandare a distanza un'apparecchiatura usando le onde radio
I ISTITUTO D ISTRUZIONE SUPERIORE Michelangelo Bartolo di PACHINO..a cura di Cammisuli Chiara Il radiocomando è un dispositivo utilizzato per comandare a distanza un'apparecchiatura usando le onde radio
Apparecchiatura Kit KS.ino2.1 Preliminare 0.1c
 Apparecchiatura Kit KS.ino2.1 Preliminare 0.1c Pagina 1 L apparecchiatura KS.ino2.1 è un Kit realizzato a scopo didattico, sperimentale; si presta ottimamente anche all utilizzo di automazioni casalinghe
Apparecchiatura Kit KS.ino2.1 Preliminare 0.1c Pagina 1 L apparecchiatura KS.ino2.1 è un Kit realizzato a scopo didattico, sperimentale; si presta ottimamente anche all utilizzo di automazioni casalinghe
Scaricatore / Analizzatore di Batterie BDX
 Scaricatore / Analizzatore di Batterie Regolatore in alta frequenza ad IGBT per scarica di prova a corrente controllata Costruzione robusta per massima affidabilità in regime di funzionamento continuo,
Scaricatore / Analizzatore di Batterie Regolatore in alta frequenza ad IGBT per scarica di prova a corrente controllata Costruzione robusta per massima affidabilità in regime di funzionamento continuo,
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
Il protocollo RS Introduzione. 1.2 Lo Standard RS-232
 1 Il protocollo RS232 1.1 Introduzione Come noto un dispositivo di interfaccia permette la comunicazione tra la struttura hardware di un calcolatore e uno o più dispositivi esterni. Uno degli obiettivi
1 Il protocollo RS232 1.1 Introduzione Come noto un dispositivo di interfaccia permette la comunicazione tra la struttura hardware di un calcolatore e uno o più dispositivi esterni. Uno degli obiettivi
Camar Elettronica s.r.l. Via Mulini Esterna n CARPI (Modena) ITALY
 ITALY") CM88-23OPTO Microprocessore con 23 ingressi digitali optoisolati Il CM88-23OPTO è uno strumento a microprocessore multicanale che accetta 23 ingressi digitali. La logica di funzionamento dello strumento
CM88-23OPTO Microprocessore con 23 ingressi digitali optoisolati Il CM88-23OPTO è uno strumento a microprocessore multicanale che accetta 23 ingressi digitali. La logica di funzionamento dello strumento
Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola
 Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola Anatomia del nostro robot Daniele Grosso (1) 1. Dipartimento
Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola Anatomia del nostro robot Daniele Grosso (1) 1. Dipartimento
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTI CLASSI PROGRAMMAZIONE ANNUALE A.S. 2016-2017 MECCANICA e MECCATRONICA MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTI CLASSI PROGRAMMAZIONE ANNUALE A.S. 2016-2017 MECCANICA e MECCATRONICA MANUTENZIONE
5. Esercitazioni di laboratorio
 5. Esercitazioni di laboratorio 5.1 Controllo di temperatura con LM335 Viene proposto il progetto di un attuatore, il quale avvii un dispositivo di potenza quando la temperatura misurata scende al di sotto
5. Esercitazioni di laboratorio 5.1 Controllo di temperatura con LM335 Viene proposto il progetto di un attuatore, il quale avvii un dispositivo di potenza quando la temperatura misurata scende al di sotto
MST_K12_INV2 Regolatore di velocita per motori in CC con inversione automatica della rotazione
 MST_K12_INV2 Regolatore di velocita per motori in CC con inversione automatica della rotazione Manuale d uso e d installazione INTRODUZIONE Il progetto MST_K12_INV2 e un semplice regolatore di velocità
MST_K12_INV2 Regolatore di velocita per motori in CC con inversione automatica della rotazione Manuale d uso e d installazione INTRODUZIONE Il progetto MST_K12_INV2 e un semplice regolatore di velocità
ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE. Indirizzo: Elettronica e Telecomunicazioni. Tema di Sistemi Elettronici Automatici TRACCIA 2
 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Indirizzo: Elettronica e Telecomunicazioni Tema di stemi Elettronici Automatici TRACCIA 2 Quest anno la traccia ministeriale è stata suddivisa in due temi,
ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Indirizzo: Elettronica e Telecomunicazioni Tema di stemi Elettronici Automatici TRACCIA 2 Quest anno la traccia ministeriale è stata suddivisa in due temi,
I S T I T U T O T E C N I C O I N D U S T R I A L E S T A T A L E V E R O N A
 I S T I T U T O T E C N I C O I N D U S T R I A L E S T A T A L E G U G L I E L M O M A R C O N I V E R O N A PROGRAMMA SVOLTO A.S. 2015/2016 CLASSE 5DL MATERIA: Elettrotecnica, elettronica e automazione
I S T I T U T O T E C N I C O I N D U S T R I A L E S T A T A L E G U G L I E L M O M A R C O N I V E R O N A PROGRAMMA SVOLTO A.S. 2015/2016 CLASSE 5DL MATERIA: Elettrotecnica, elettronica e automazione
Collaudo statico di un ADC
 Collaudo statico di un ADC Scopo della prova Verifica del funzionamento di un tipico convertitore Analogico-Digitale. Materiali 1 Alimentatore 1 Oscilloscopio 1 Integrato ADC 0801 o equivalente Alcuni
Collaudo statico di un ADC Scopo della prova Verifica del funzionamento di un tipico convertitore Analogico-Digitale. Materiali 1 Alimentatore 1 Oscilloscopio 1 Integrato ADC 0801 o equivalente Alcuni
MST_K12_FAN. Regolatore di velocita per ventole PC. Manuale d uso e d installazione
 MST_K12_FAN Regolatore di velocita per ventole PC Manuale d uso e d installazione Page 1 of 7 Indice Argomenti 1.0 Revisioni. pag. 3 2.0 Introduzione.... pag. 3 2.1 Caratteristiche generali... pag. 3 3.0
MST_K12_FAN Regolatore di velocita per ventole PC Manuale d uso e d installazione Page 1 of 7 Indice Argomenti 1.0 Revisioni. pag. 3 2.0 Introduzione.... pag. 3 2.1 Caratteristiche generali... pag. 3 3.0
Classe III specializzazione elettronica. Sistemi automatici
 Macro unità n 1 Classe III specializzazione elettronica Sistemi automatici Reti elettriche Reti elettriche in regime continuo. Generatore, resistori, legge di Ohm. Resistenze in serie e parallelo. Partitore
Macro unità n 1 Classe III specializzazione elettronica Sistemi automatici Reti elettriche Reti elettriche in regime continuo. Generatore, resistori, legge di Ohm. Resistenze in serie e parallelo. Partitore
SENSORE DI TENSIONE SP
 SENSORE DI TENSIONE SP3000-01 2 Sensore di tensione per la cattura di segnali elettrici senza contatto metallico sul conduttore L ingegneria elettronica è spesso chiamata a misurare impulsi di breve durata
SENSORE DI TENSIONE SP3000-01 2 Sensore di tensione per la cattura di segnali elettrici senza contatto metallico sul conduttore L ingegneria elettronica è spesso chiamata a misurare impulsi di breve durata
INDICE KIT PER TRASFORMATORI E MOTORI KIT PER IL MONTAGGIO DI 2 TRASFORMATORI DL 2106
 INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI BOBINATRICE PER MOTORI E TRASFORMATORI BOBINATRICE DIDATTICA PER MOTORI DL 1010B DL 1010D DL
INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI BOBINATRICE PER MOTORI E TRASFORMATORI BOBINATRICE DIDATTICA PER MOTORI DL 1010B DL 1010D DL
MST_K15. Regolatore di velocita per Ventole in CC. Controllato in temperatura. Manuale d uso e d installazione
 MST_K15 Regolatore di velocita per Ventole in CC Controllato in temperatura Manuale d uso e d installazione Introduzione Il circuito MST_K15 e' un regolatore di velocità per ventole (Fan Manager) in corrente
MST_K15 Regolatore di velocita per Ventole in CC Controllato in temperatura Manuale d uso e d installazione Introduzione Il circuito MST_K15 e' un regolatore di velocità per ventole (Fan Manager) in corrente
CIRCUITO DI CONDIZIONAMENTO PER IL TRASDUTTORE DI TEMPERATURA AD590
 CIRCUITO DI CONDIZIONAMENTO PER IL ASDUTTORE DI TEMPERATURA AD590 Gruppo n 5 Urbini Andrea Marconi Simone Classe 5C 2001/2002 SPECIFICHE DEL PROGETTO: realizzare un circuito in grado di trasformare una
CIRCUITO DI CONDIZIONAMENTO PER IL ASDUTTORE DI TEMPERATURA AD590 Gruppo n 5 Urbini Andrea Marconi Simone Classe 5C 2001/2002 SPECIFICHE DEL PROGETTO: realizzare un circuito in grado di trasformare una
SEA Descrizione. Centralina Controllo Strip LED RGB
 Descrizione La centralina di controllo consente di pilotare Strip LED RGB o Bianchi fino ad un massimo di 10 Mt per Strip da 60 LED/mt o 20 Mt per Strip da 30 LED/Mt. La centralina puo essere configurata
Descrizione La centralina di controllo consente di pilotare Strip LED RGB o Bianchi fino ad un massimo di 10 Mt per Strip da 60 LED/mt o 20 Mt per Strip da 30 LED/Mt. La centralina puo essere configurata
HOME CINEMA CORPORATE EDUCATIONAL. Wave. Schermo motorizzato di design
 HOME CINEMA CORPORATE EDUCATIONAL Wave Schermo motorizzato di design 160 170 183 203 240 213 223 244 274 305 335 366 406 450 500 550 600 650 16:9 16:10 4:3 Wave Schermo motorizzato che si distingue per
HOME CINEMA CORPORATE EDUCATIONAL Wave Schermo motorizzato di design 160 170 183 203 240 213 223 244 274 305 335 366 406 450 500 550 600 650 16:9 16:10 4:3 Wave Schermo motorizzato che si distingue per
Motori a corrente continua BRUSHLESS
 Motori a corrente continua BRUSHLESS Motori 30 W Ideale nei piccoli sistemi automatici a velocità variabile Flessibile : Regolazione velocità variabile 4 quadranti Completo : Freno, encoder e filtro CEM
Motori a corrente continua BRUSHLESS Motori 30 W Ideale nei piccoli sistemi automatici a velocità variabile Flessibile : Regolazione velocità variabile 4 quadranti Completo : Freno, encoder e filtro CEM
Display numerico con i LED
 Display numerico con i LED Ferrari, Porti, Zannetti 1 febbraio 2016 1 Scheda Questo progetto prevede l unione di più caratteristiche prese dai vari progetti fatti in precedenza, per riuscire a formare
Display numerico con i LED Ferrari, Porti, Zannetti 1 febbraio 2016 1 Scheda Questo progetto prevede l unione di più caratteristiche prese dai vari progetti fatti in precedenza, per riuscire a formare
Micro Servoazionamento Passo-Passo - ViX
 Micro Servoazionamento www.parker-eme.com/stepper Micro Servoazionamento Breve panoramica Descrizione La serie ViX, servoazionamenti digitali intelligenti di Parker, viene completata con l aggiunta della
Micro Servoazionamento www.parker-eme.com/stepper Micro Servoazionamento Breve panoramica Descrizione La serie ViX, servoazionamenti digitali intelligenti di Parker, viene completata con l aggiunta della
 Servomotori I servomotori sono motori conosciuti anche come servocomandi, motori servo, o più concisamente servo. In questa lezione andremo ad illustrare questi dispositivi in modo semplice e completo,
Servomotori I servomotori sono motori conosciuti anche come servocomandi, motori servo, o più concisamente servo. In questa lezione andremo ad illustrare questi dispositivi in modo semplice e completo,
Robot Escape scatola di montaggio. Presentazione del produttore. Attrezzi necessari per la costruzione del robot Escape:
 105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
Encoder ottico MEC22 HR
 Descrizione MEC22 HR è un encoder ottico ad albero cavo ad alta risoluzione, che può essere fissato rapidamente e con facilità ad alberi motore di diverse taglie. L'encoder offre due uscite ad onda quadra
Descrizione MEC22 HR è un encoder ottico ad albero cavo ad alta risoluzione, che può essere fissato rapidamente e con facilità ad alberi motore di diverse taglie. L'encoder offre due uscite ad onda quadra
SENSORI OTTICI - FOTORESISTENZE
 SENSORI OTTICI - FOTORESISTENZE ComponentI elettronici con resistenza inversamente proporzionale alla quantità di luce che lo colpisce. La corrente che attraversa una fotoresistenza è direttamente proporzionale
SENSORI OTTICI - FOTORESISTENZE ComponentI elettronici con resistenza inversamente proporzionale alla quantità di luce che lo colpisce. La corrente che attraversa una fotoresistenza è direttamente proporzionale
Simatic Live. SIRIUS-SIDOOR la nostra soluzione integrata per il settore ascensoristico
 Simatic Live SIRIUS-SIDOOR la nostra soluzione integrata per il settore ascensoristico Punti di Forza Leader di settore nel mercato ascensoristico come fornitore di sistemi di azionamento porte Piattaforma
Simatic Live SIRIUS-SIDOOR la nostra soluzione integrata per il settore ascensoristico Punti di Forza Leader di settore nel mercato ascensoristico come fornitore di sistemi di azionamento porte Piattaforma
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche. Pietro Bonora Liceo Scientifico A.B.
 LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
LEGO Mindstorms e Arduino nella scuola secondaria di secondo grado: alcune esperienze didattiche Pietro Bonora Liceo Scientifico A.B. Sabin, Bologna Perché la robotica a scuola E' interessante e motivante;
RELÈ di TERRA PER TENSIONE CONTINUA M79
 RELÈ di TERRA PER TENSIONE CONTINUA M79 1 di 6 GENERALITÀ Il relè statico M79 è utilizzato nelle reti di distribuzione in corrente continua, bilanciate verso massa, per monitorare rilevare e segnalare
RELÈ di TERRA PER TENSIONE CONTINUA M79 1 di 6 GENERALITÀ Il relè statico M79 è utilizzato nelle reti di distribuzione in corrente continua, bilanciate verso massa, per monitorare rilevare e segnalare
IGB2 MANUALE DI SERVIZIO
 11/10/2005 17.01 Pagina 1 di 9 IGB2 MANUALE DI SERVIZIO Indice 1 Generalità... 2 2 Schema a blocchi... 3 3 Collegamenti elettrici... 3 4 Disposizione componenti di taratura e regolazione... 4 5 Adattamento
11/10/2005 17.01 Pagina 1 di 9 IGB2 MANUALE DI SERVIZIO Indice 1 Generalità... 2 2 Schema a blocchi... 3 3 Collegamenti elettrici... 3 4 Disposizione componenti di taratura e regolazione... 4 5 Adattamento
RELAZIONE DI TELECOMUNICAZIONI ITIS Vobarno Titolo: Il diodo
 RELAZIONE DI TELECOMUNICAZIONI ITIS Vobarno Titolo: Il diodo Nome: Samuele Sandrini Gruppo n. 5. 28/1/14 Il diodo è un bipolo (componente con 2 poli, anodo e catodo), con polarità, che ha la funzione di
RELAZIONE DI TELECOMUNICAZIONI ITIS Vobarno Titolo: Il diodo Nome: Samuele Sandrini Gruppo n. 5. 28/1/14 Il diodo è un bipolo (componente con 2 poli, anodo e catodo), con polarità, che ha la funzione di
VERIFICA SISTEMI E AUTOMAZIONE CLASSE VEL ALUNNO:... Punteggio 1 punto per ogni risposta/ esercizio corrett, tranne il secondo che vale 2
 VERIFICA SISTEMI E AUTOMAZIONE CLASSE VEL 23 10 2013 ALUNNO:... Punteggio 1 punto per ogni risposta/ esercizio corrett, tranne il secondo che vale 2 1 - La funzione del nodo di confronto all interno dei
VERIFICA SISTEMI E AUTOMAZIONE CLASSE VEL 23 10 2013 ALUNNO:... Punteggio 1 punto per ogni risposta/ esercizio corrett, tranne il secondo che vale 2 1 - La funzione del nodo di confronto all interno dei
Serie DRWS: driver per motori Stepper, taglia unica Serie DRWB: driver per motori Brushless, taglie da 100, 400 e 750 W
 C_Electrics > 206 > Driver per il controllo dell attuazione elettrica Serie DRWS e DRWB Driver per il controllo dell attuazione elettrica Serie DRWS e DRWB Serie DRWS: driver per motori Stepper, taglia
C_Electrics > 206 > Driver per il controllo dell attuazione elettrica Serie DRWS e DRWB Driver per il controllo dell attuazione elettrica Serie DRWS e DRWB Serie DRWS: driver per motori Stepper, taglia
IST-1395.CS01.01/A CE395CS / Istruzioni d uso Pag. 2/6
 IT IST-1395.CS01.01/A File: IST-1395.CS01.01-A_CE395CS-IT_Convertitore RS232-RS422.docx CONVERTITORE SERIALE RS232-RS485 CE395CS ISTRUZIONI D USO TECNOCONTROL S.r.l. Via Miglioli, 4720090 SEGRATE (MI)
IT IST-1395.CS01.01/A File: IST-1395.CS01.01-A_CE395CS-IT_Convertitore RS232-RS422.docx CONVERTITORE SERIALE RS232-RS485 CE395CS ISTRUZIONI D USO TECNOCONTROL S.r.l. Via Miglioli, 4720090 SEGRATE (MI)
Trasportatori a catena mk
 Trasportatori a catena mk Tecnologia del trasportatore mk 178 Indice Trasportatori a catena mk KTF-P 2010 180 SRF-P 2010 192 SRF-P 2012 204 Catene dei trasportatori a catena 216 Esempi di applicazione
Trasportatori a catena mk Tecnologia del trasportatore mk 178 Indice Trasportatori a catena mk KTF-P 2010 180 SRF-P 2010 192 SRF-P 2012 204 Catene dei trasportatori a catena 216 Esempi di applicazione
Sch ed e Ser ie RD7 7
 Sch ed e Ser ie RD7 7 Manuale di installazione ed uso. 1) Descrizione generale 2) Installazione 3) Configurazione 4) Programmazione 5) Caratteristiche elettriche @ 2001 sas Corso Kennedy 32/21-10098 Rivoli
Sch ed e Ser ie RD7 7 Manuale di installazione ed uso. 1) Descrizione generale 2) Installazione 3) Configurazione 4) Programmazione 5) Caratteristiche elettriche @ 2001 sas Corso Kennedy 32/21-10098 Rivoli
SERVOMOTORI A ROTAZIONE CONTINUA ( 3 )
") Corso di BASCOM 8051 - (Capitolo 2 7 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. SERVOMOTORI A ROTAZIONE CONTINUA ( 3 ) Un modello estremamente interessante di Servomotore
Corso di BASCOM 8051 - (Capitolo 2 7 ) Corso Teorico/Pratico di programmazione in BASCOM 8051. Autore: DAMINO Salvatore. SERVOMOTORI A ROTAZIONE CONTINUA ( 3 ) Un modello estremamente interessante di Servomotore
MANUALE ISTRUZIONI PER UNA CORRETTA INSTALLAZIONE DEI MOTORI TUBOLARI ELETTRONICI
 MANUALE ISTRUZIONI PER UNA CORRETTA INSTALLAZIONE DEI MOTORI TUBOLARI ELETTRONICI www.bruelmotion.com SICUREZZA NOTE IMPORTANTE: Per garantire la sicurezza è necessario effettuare una corretta installazione,
MANUALE ISTRUZIONI PER UNA CORRETTA INSTALLAZIONE DEI MOTORI TUBOLARI ELETTRONICI www.bruelmotion.com SICUREZZA NOTE IMPORTANTE: Per garantire la sicurezza è necessario effettuare una corretta installazione,
KS 405. Terminale operatore con PLC integrato. inferiore a 200mA senza carichi. Memoria Programma Memoria Pagine
 KS 405 Terminale operatore con PLC integrato - Tastiera personalizzabile - Elevata velocita' di esecuzione (5msec. tempo di ciclo standard) - Programmazione a contatti tramite linguaggio ladder - Funzioni
KS 405 Terminale operatore con PLC integrato - Tastiera personalizzabile - Elevata velocita' di esecuzione (5msec. tempo di ciclo standard) - Programmazione a contatti tramite linguaggio ladder - Funzioni
Pedali elettrici proporzionali serie PEP
 Pedali elettrici proporzionali serie PEP 03.PEP - 0909 Indice del contenuto: Pagina Generalità: 3 Caratteristiche tecniche: 4 Curve di regolazione in uscita: 5-6-7-8 Dimensioni di installazione unidirezionale:
Pedali elettrici proporzionali serie PEP 03.PEP - 0909 Indice del contenuto: Pagina Generalità: 3 Caratteristiche tecniche: 4 Curve di regolazione in uscita: 5-6-7-8 Dimensioni di installazione unidirezionale:
INDICE. 1 DESCRIZIONE pg VISTA DISPOSITIVO pg CARATTERISTICHE TECNICHE pg DESCRIZIONE CIRCUITALE pg. 5-6
 INDICE 1 DESCRIZIONE pg. 2 2 VISTA DISPOSITIVO pg. 3 3 CARATTERISTICHE TECNICHE pg. 4 4 DESCRIZIONE CIRCUITALE pg. 5-6 5 IDENTIFICAZIONE COMPONENTI pg. 7-8 6 ISTRUZIONI DI TARATURA pg. 9 7 ELENCO ALLEGATI
INDICE 1 DESCRIZIONE pg. 2 2 VISTA DISPOSITIVO pg. 3 3 CARATTERISTICHE TECNICHE pg. 4 4 DESCRIZIONE CIRCUITALE pg. 5-6 5 IDENTIFICAZIONE COMPONENTI pg. 7-8 6 ISTRUZIONI DI TARATURA pg. 9 7 ELENCO ALLEGATI
Per vedere tutti i tutorial:
 www.creativecommons.org Arduino Tutorial #16 - Mocho - Robot pulitore. Materiale utilizzato Arduino UNO - Motor Shield (2A Motor Shield) - motoriduttori - 2 ruote - sensore Sharp di distanza - struttura
www.creativecommons.org Arduino Tutorial #16 - Mocho - Robot pulitore. Materiale utilizzato Arduino UNO - Motor Shield (2A Motor Shield) - motoriduttori - 2 ruote - sensore Sharp di distanza - struttura
Componenti a Semiconduttore
 Componenti a Semiconduttore I principali componenti elettronici si basano su semiconduttori (silicio o germani) che hanno subito il trattamento del drogaggio. In tal caso si parla di semiconduttori di
Componenti a Semiconduttore I principali componenti elettronici si basano su semiconduttori (silicio o germani) che hanno subito il trattamento del drogaggio. In tal caso si parla di semiconduttori di
Mod. CPMS/EV IMPIANTO MODULARE PER IL CONTROLLO DI PROCESSO PROGRAMMA DI FORMAZIONE: INTRODUZIONE CONTROLLO DI PORTATA CONTROLLO DI LIVELLO
 IMPIANTO DULARE PER IL CONTROLLO DI PROCESSO Mod. CPMS/EV INTRODUZIONE : Il sistema di controllo di processo modulare, Mod. CPMS/EV, costituisce una soluzione flessibile ed aperta per lo studio dei concetti
IMPIANTO DULARE PER IL CONTROLLO DI PROCESSO Mod. CPMS/EV INTRODUZIONE : Il sistema di controllo di processo modulare, Mod. CPMS/EV, costituisce una soluzione flessibile ed aperta per lo studio dei concetti
Corso di Laurea Magistrale in Informatica
 Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it Misurazione della distanza: triangolazione Se due dispositivi a distanza nota
Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it Misurazione della distanza: triangolazione Se due dispositivi a distanza nota
GUIDA RAPIDA PER LA CONFIGURAZIONE DI AZIONAMENTI A VELOCITÀ VARIABILE
 I GUIDA RAPIDA PER LA CONFIGURAZIONE DI AZIONAMENTI A VELOCITÀ VARIABILE LOVATO ELECTRIC S.P.A. 24020 GORLE (BERGAMO) ITALIA VIA DON E. MAZZA, 12 TEL. 035 4282111 FAX (Nazionale): 035 4282200 FAX (International):
I GUIDA RAPIDA PER LA CONFIGURAZIONE DI AZIONAMENTI A VELOCITÀ VARIABILE LOVATO ELECTRIC S.P.A. 24020 GORLE (BERGAMO) ITALIA VIA DON E. MAZZA, 12 TEL. 035 4282111 FAX (Nazionale): 035 4282200 FAX (International):
GENERATORE DI RAMPA A GRADINI
 Istituto Professionale di Stato per l'industria e l'artigianato MORETTO Via Luigi Apollonio, 21 BRESCIA GENERATORE DI RAMPA A GRADINI Realizzazione CHIMINI MASSIMILIANO FONTANA MASSIMO della classe 5AI
Istituto Professionale di Stato per l'industria e l'artigianato MORETTO Via Luigi Apollonio, 21 BRESCIA GENERATORE DI RAMPA A GRADINI Realizzazione CHIMINI MASSIMILIANO FONTANA MASSIMO della classe 5AI
LAVORI SOTTO TENSIONE E VIETATO!
 Installazione: Installare il sensore verticalmente a parete (vedere Fig. 1, 2, 3) o ad angolo (Figure 4, 5), al riparo dalle intemperie. Verificare che il sensore sia ben avvitato al muro e che non si
Installazione: Installare il sensore verticalmente a parete (vedere Fig. 1, 2, 3) o ad angolo (Figure 4, 5), al riparo dalle intemperie. Verificare che il sensore sia ben avvitato al muro e che non si
CASSETTE A PORTATA VARIABILE DOPPIO CONDOTTO
 GENERALITA' Generalità : Le cassette a portata variabile della serie sono elementi di regolazione della portata che consentono la miscelazione di aria primaria calda ed aria primaria fredda al fine di
GENERALITA' Generalità : Le cassette a portata variabile della serie sono elementi di regolazione della portata che consentono la miscelazione di aria primaria calda ed aria primaria fredda al fine di
Safety. Detection. Control. Barriere di misura e automazione. Issue 1
 Safety. Detection. Control. Barriere di misura e automazione Issue 1 Corpo in alluminio Anodizzato Guarda il Video -10... +55 C Temperatura operativa Ideale anche in aree refrigerate Software di configurazione
Safety. Detection. Control. Barriere di misura e automazione Issue 1 Corpo in alluminio Anodizzato Guarda il Video -10... +55 C Temperatura operativa Ideale anche in aree refrigerate Software di configurazione
M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE
 M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE CORSO DI ORDINAMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Sessione d esame: 2013
M045 - ESAME DI STATO DI ISTITUTO PROFESSIONALE CORSO DI ORDINAMENTO Indirizzo: TECNICO DELLE INDUSTRIE ELETTRICHE Tema di: SISTEMI AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE Sessione d esame: 2013
Introduzione alla robotica
 LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
HP LED Driver Shield. EtherMania di Signorini Marco Via Cadore 9 21046 MALNATE (VA) P.I. 03111760124 REA VA-324137 http://www.ethermania.
 P.I. 03111760124 REA VA-324137 http://www.ethermania.") HP LED Driver Shield Introduzione Lo HPLEDDriverShield e' uno shield per Arduino (UNO e Mega 2560) che permette di pilotare fino a 4 stringhe di LED High Power. Ogni canale e' dotato di un preciso generatore
HP LED Driver Shield Introduzione Lo HPLEDDriverShield e' uno shield per Arduino (UNO e Mega 2560) che permette di pilotare fino a 4 stringhe di LED High Power. Ogni canale e' dotato di un preciso generatore
Progetto 3: Termometro con convertitore A/D
 Progetto 3: Termometro con convertitore A/D Questo progetto dimostra come acquisire un segnale da una sensore di temperatura analogico e visualizzare la temperatura attraverso il collegamento seriale con
Progetto 3: Termometro con convertitore A/D Questo progetto dimostra come acquisire un segnale da una sensore di temperatura analogico e visualizzare la temperatura attraverso il collegamento seriale con
Corso di programmazione Arduino DI MALVEZZI DAVIDE
 Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell