Introduzione a Matlab e Simulink
|
|
|
- Aniella Gentile
- 7 anni fa
- Просмотров:
Транскрипт
1 Introduzione a Matlab e Simulink Fondamenti di Automatica 1
2 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento, l evoluzione di un sistema complesso, oppure di più sistemi che interagiscono? Fondamenti di Automatica 2
3 A cosa serve questa presentazione Scopi di questo materiale: fornire le informazioni necessarie per l uso di Simulink in relazione alle esercitazioni del corso; dare una panoramica delle potenzialità di Matlab e Simulink per la formulazione e la soluzione di problemi numerici nell Ingegneria. Fondamenti di Automatica 3
4 Dove trovare altre informazioni? Sito web di Mathworks: seguendo i link alla voce support è possibile trovare i manuali di Matlab in formato pdf. ( ) Un testo in italiano di introduzione a Matlab e Simulink: Guida Operativa a MATLAB, SIMULINK e Control Toolbox Alberto Cavallo, Roberto Setola, & Francesco Vasca Liguori Editore, 1994 in biblioteca Fondamenti di Automatica 4
5 Indice del materiale Descrizione generale dell ambiente Simulink associato a Matlab. Principi di funzionamento. Caratteristiche dell ambiente di simulazione. Esempi: realizzazione di modelli matematici di sistemi dinamici facendo uso di Simulink e loro simulazione. Fondamenti di Automatica 5
6 La simulazione in Simulink d d y n t n d d n 1 = f n 1 t y, L, d d y t, y, u, t Approccio alla realizzazione di uno schema Simulink Equazione differenziale generica, anche non-lineare, anche con elementi tempovarianti, in forma esplicita. Fondamenti di Automatica 6
7 La simulazione in Simulink (2) N integratori in cascata per esprimere il legame tra la funzione incognita y(t) e le sue derivate sino alla n-esima. Blocco che rappresenta il calcolo della funzione f( ). Fondamenti di Automatica 7

8 La simulazione in Simulink (3) Modularità: sistema complesso come interconnessione di svariati sottosistemi; ogni sottosistema può a sua volta essere composto da sottosistemi, sino ad arrivare ai sottosistemi elementari; un sistema elementare è descritto da una sola relazione matematica, ad esempio una equazione differenziale oppure algebrica ecc. Fondamenti di Automatica 8
9 Principio di funzionamento Simulink contiene una libreria di blocchi che descrivono elementi statici e dinamici elementari; L utente compone lo schema a blocchi del sistema da simulare mediante l interconnessione dei blocchetti elementari; Simulink genera automaticamente le equazioni e risolve il problema numerico di simulazione desiderato. Fondamenti di Automatica 9
10 Principio di funzionamento (2) I modelli costruiti in Simulink possono essere modelli gerarchici: ogni blocco del sistema può essere a sua volta un sottosistema complesso. Simulink interagisce con Matlab attraverso il Workspace i modelli Simulink possono contenere variabili del Workspace; Allo stesso modo il risultato delle simulazioni può essere esportato nel Workspace e analizzato con Matlab. Fondamenti di Automatica 10



11 Spost. del carrello La simulazione: esempio Forza est. Fondamenti di Automatica 11

12 La simulazione: esempio (2) Supponiamo assente l attrito viscoso per ora Dall equazione differenziale allo schema a blocchi che la rappresenta Fondamenti di Automatica 12
 e comporre il sistema da simulare mediante i diversi blocchi elementari già")
13 L interfaccia grafica Digitando simulink al prompt di Matlab si apre la libreria dei modelli. Da qui è possibile creare un nuovo modello (foglio bianco) e comporre il sistema da simulare mediante i diversi blocchi elementari già disponibili. Fondamenti di Automatica 13


14 Nuovo modello I blocchi-base sono raggruppati in categorie. La maggior parte dei blocchi che useremo è contenuta nella categoria Simulink Fondamenti di Automatica 14


15 Principali librerie Simulink Libreria Continuos: Blocchi dinamici a tempo continuo Libreria Discrete: Blocchi dinamici a tempo discreto Fondamenti di Automatica 15
 Libreria Sources: segnali")

16 Principali librerie Simulink (2) Libreria Sources: segnali di ingresso Libreria Sinks: output dati Fondamenti di Automatica 16

17 Principali librerie Simulink (3) Libreria Discontinues: discontinuità Libreria Math Operations: operatori matematici Fondamenti di Automatica 17
18 Principali librerie Simulink (4) Libreria Signal Routing : Gestione dei segnali Libreria Ports and Subsystems : Gestione delle connessioni tra sottosistemi Fondamenti di Automatica 18
 Dallo schema a blocchi")

19 La simulazione: esempio (3) Dallo schema a blocchi al modello in Simulink Fondamenti di Automatica 19
; Parametri del solutore.")
20 Parametri della simulazione L utente deve definire: Istanti di inizio e fine della simulazione; Tipo di solutore numerico (se il problema richiede metodi particolari); Parametri del solutore. Fondamenti di Automatica 20

21 Visualizzazione del risultato tramite il blocco di tipo scope è possibile vedere l evoluzione temporale della soluzione Fondamenti di Automatica 21
22 Le condizioni iniziali Le condizioni iniziali del sistema, (posizione iniziale del corpo e sua velocità iniziale) vengono assegnate come proprietà dei blocchi di tipo integrator. Sono necessarie per determinare in maniera univoca una soluzione alle equazioni differenziali descritte tramite i blocchi elementari in Simulink Se non vengono assegnate esplicitamente, il programma assegna condizioni iniziali nulle. Fondamenti di Automatica 22

23 Condizioni iniziali Per assegnarle, eseguire un doppio click col mouse/sinistro su ciascun blocco integrator : Condizioni iniziali Fondamenti di Automatica 23
24 Ancora un esempio Fondamenti di Automatica 24

25 In Simulink Fondamenti di Automatica 25
26 Aggiungiamo un controllore proporzionale Fondamenti di Automatica 26

27 In Simulink Il serbatoio Fondamenti di Automatica 27
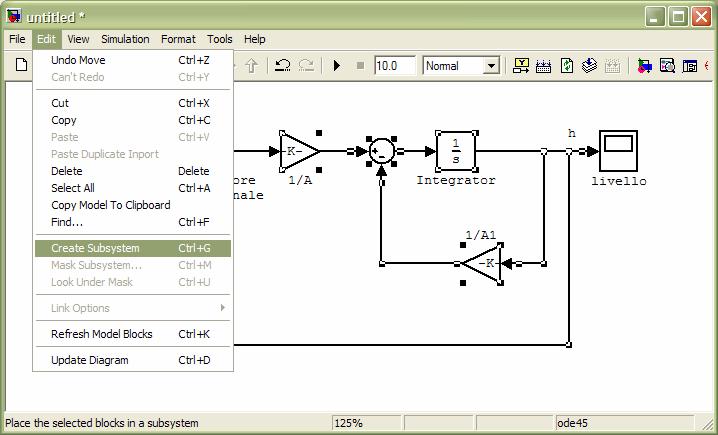
28 Modelli e sottomodelli Azioni da fare per creare un sottomodello da uno schema a blocchi in Simulink 1. Selezionare (mouse/sx premuto) la porzione di schema che si vuole far diventare un sottomodello 2. Dal menù del foglio di lavoro in Simulink selezionare Edit Create subsystem 3. Nel foglio di lavoro la parte di schema prima selezionata viene racchiusa da un nuovo box, che contiene il nuovo sottosistema. Fondamenti di Automatica 28

29 La regione selezionata diventerà il nuovo sottosistema Fondamenti di Automatica 29

30 Fondamenti di Automatica 30

31 Modello completo e sottomodello Fondamenti di Automatica 31
32 Aggiungiamo un disturbo Fondamenti di Automatica 32

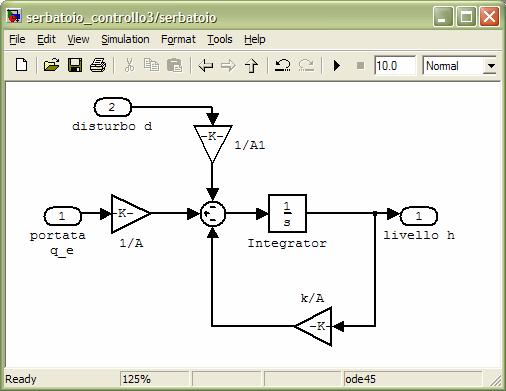
33 In Simulink Fondamenti di Automatica 33
Fondamenti di di A utomatica Automatica Prof. Bruno Picasso Introduzione all all uso di di S imulink Simulink
 Fondamenti di Automatica Prof. Bruno Picasso Introduzione all uso di Simulink L ambiente Simulink Simulink è un ambiente grafico per la simulazione di sistemi complessi Perché non basta Matlab? È spesso
Fondamenti di Automatica Prof. Bruno Picasso Introduzione all uso di Simulink L ambiente Simulink Simulink è un ambiente grafico per la simulazione di sistemi complessi Perché non basta Matlab? È spesso
Introduzione al Simulink
 Sommario Descrizione generale dell ambiente Simulink di Matlab. Principi di funzionamento. Ambiente di simulazione. Esempi: realizzazione di modelli matematici di sistemi dinamici facendo uso di Simulink
Sommario Descrizione generale dell ambiente Simulink di Matlab. Principi di funzionamento. Ambiente di simulazione. Esempi: realizzazione di modelli matematici di sistemi dinamici facendo uso di Simulink
Introduzione a Simulink
 Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: [email protected] URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: [email protected] URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Matlab e Simulink per i sistemi di controllo
 Matlab e Simulink per i sistemi di controllo Introduzione L utilizzo del toolbox SIMULINK di Matlab facilita la simulazione di sistemi interconnessi, consentendo la loro rappresentazione direttamente per
Matlab e Simulink per i sistemi di controllo Introduzione L utilizzo del toolbox SIMULINK di Matlab facilita la simulazione di sistemi interconnessi, consentendo la loro rappresentazione direttamente per
INTRODUZIONE A SIMULINK
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm INTRODUZIONE A SIMULINK
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm INTRODUZIONE A SIMULINK
INTRODUZIONE A SIMULINK
 INTRODUZIONE A SIMULINK ing. vincenzo lippiello Versione 1.0 1 Avviare Simulink Nella finestra di comando di MATLAB, nel prompt >>, digitare simulink e premere Enter Oppure cliccare sull apposita icona
INTRODUZIONE A SIMULINK ing. vincenzo lippiello Versione 1.0 1 Avviare Simulink Nella finestra di comando di MATLAB, nel prompt >>, digitare simulink e premere Enter Oppure cliccare sull apposita icona
CONTROLLI AUTOMATICI e SISTEMI ELETTRICI LINEARI Ingegneria Meccatronica INTRODUZIONE Matlab (seconda parte) e SIMULINK
 e SIMULINK") CONTROLLI AUTOMATICI e SISTEMI ELETTRICI LINEARI Ingegneria Meccatronica INTRODUZIONE Matlab (seconda parte) e SIMULINK Emilio Lorenzani Tel. 0522 522443 e-mail: [email protected] http://www.ingre.unimore.it
CONTROLLI AUTOMATICI e SISTEMI ELETTRICI LINEARI Ingegneria Meccatronica INTRODUZIONE Matlab (seconda parte) e SIMULINK Emilio Lorenzani Tel. 0522 522443 e-mail: [email protected] http://www.ingre.unimore.it
Laboratorio di Matlab
 Laboratorio di Matlab Alessandro Formaglio Dipartimento di Ingegneria dell Informazione, Università di Siena [email protected] http://www.dii.unisi.it/ control/matlab/labmatlab.html 21 Luglio 2009 DII
Laboratorio di Matlab Alessandro Formaglio Dipartimento di Ingegneria dell Informazione, Università di Siena [email protected] http://www.dii.unisi.it/ control/matlab/labmatlab.html 21 Luglio 2009 DII
Simulink. Introduzione a Simulink Esempio sull analisi di sistemi dinamici lineari con il Control System Toolbox e Simulink v. file.m e.
 Simulink Introduzione a Simulink Esempio sull analisi di sistemi dinamici lineari con il Control System Toolbox e Simulink v. file.m e.mdl Che cos è? Simulink è un programma per la modellazione, la simulazione
Simulink Introduzione a Simulink Esempio sull analisi di sistemi dinamici lineari con il Control System Toolbox e Simulink v. file.m e.mdl Che cos è? Simulink è un programma per la modellazione, la simulazione
Simulazione di sistemi non lineari Introduzione a Stateflow
 Simulazione di sistemi non lineari Introduzione a Stateflow Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II [email protected] Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA)
Simulazione di sistemi non lineari Introduzione a Stateflow Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II [email protected] Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA)
Fondamenti di Automatica
 Parte 1, 1 Parte 1, 2 ESAMI Solo prova scritta Iscrizione elettronica (http://control.units.it) CORSI A MONTE Analisi I e II Geometria DEEI-Università di Trieste Tel. 334 6936615 Email: [email protected]
Parte 1, 1 Parte 1, 2 ESAMI Solo prova scritta Iscrizione elettronica (http://control.units.it) CORSI A MONTE Analisi I e II Geometria DEEI-Università di Trieste Tel. 334 6936615 Email: [email protected]
Fondamenti di Automatica
 Fondamenti di Automatica Introduzione e modellistica dei sistemi Introduzione allo studio dei sistemi Modellistica dei sistemi dinamici elettrici Modellistica dei sistemi dinamici meccanici Modellistica
Fondamenti di Automatica Introduzione e modellistica dei sistemi Introduzione allo studio dei sistemi Modellistica dei sistemi dinamici elettrici Modellistica dei sistemi dinamici meccanici Modellistica
Università degli Studi di Napoli Federico II CdL Ing. Elettrica Corso di Laboratorio di Circuiti Elettrici
 Università degli Studi di Napoli Federico II CdL Ing. Elettrica Corso di Laboratorio di Circuiti Elettrici Dr. Carlo Petrarca Dipartimento di Ingegneria Elettrica Università di Napoli FEDERICO II 1 Introduzione
Università degli Studi di Napoli Federico II CdL Ing. Elettrica Corso di Laboratorio di Circuiti Elettrici Dr. Carlo Petrarca Dipartimento di Ingegneria Elettrica Università di Napoli FEDERICO II 1 Introduzione
FONDAMENTI DI AUTOMATICA Corso di Laurea in Ingegneria Aerospaziale Prof. Silvia Strada. Introduzione
 FONDAMENTI DI AUTOMATICA Corso di Laurea in Ingegneria Aerospaziale Prof. Silvia Strada Introduzione 1 Cos è l Automatica? L Automatica è la disciplina che studia i sistemi di automazione, cioè sistemi
FONDAMENTI DI AUTOMATICA Corso di Laurea in Ingegneria Aerospaziale Prof. Silvia Strada Introduzione 1 Cos è l Automatica? L Automatica è la disciplina che studia i sistemi di automazione, cioè sistemi
ẋ 1 = 2x 1 + (sen 2 (x 1 ) + 1)x 2 + 2u (1) y = x 1
 + 1)x 2 + 2u (1) y = x 1") Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Utilizzo di Matlab per l analisi di sistemi dinamici lineari
 Intro a Matlab per sistemi LTI, 1 Utilizzo di Matlab per l analisi di sistemi dinamici lineari Sistemi dinamici lineari a tempo continuo ed a tempo discreto Indice del materiale Intro a Matlab per sistemi
Intro a Matlab per sistemi LTI, 1 Utilizzo di Matlab per l analisi di sistemi dinamici lineari Sistemi dinamici lineari a tempo continuo ed a tempo discreto Indice del materiale Intro a Matlab per sistemi
MATLAB. Guida al laboratorio di automatica. Mariagrazia Dotoli, Maria Pia Fanti
 MATLAB. Guida al laboratorio di automatica Mariagrazia Dotoli, Maria Pia Fanti 1 A Antonio e Francesca M. D. A Gianfranco e Valentino M.P. F. 2 Prefazione L idea di scrivere questo libro nasce dalla opportunità
MATLAB. Guida al laboratorio di automatica Mariagrazia Dotoli, Maria Pia Fanti 1 A Antonio e Francesca M. D. A Gianfranco e Valentino M.P. F. 2 Prefazione L idea di scrivere questo libro nasce dalla opportunità
MATLAB-SIMULINK. Simulink. Simulazione di un filtro passabasso RC. Ing. Alessandro Pisano.
 1 MATLAB-SIMULINK Simulink Simulazione di un filtro passabasso RC Ing. Alessandro Pisano [email protected] 2 Filtro passa-basso RC V in + V out Ingredienti Simulink Esecuzione automatica dei modelli
1 MATLAB-SIMULINK Simulink Simulazione di un filtro passabasso RC Ing. Alessandro Pisano [email protected] 2 Filtro passa-basso RC V in + V out Ingredienti Simulink Esecuzione automatica dei modelli
SIMULINK MATLAB E SIMULINK. Model-Based and System-Based Design MATLAB SIMULINK. Altri prodotti:
 SIMULINK Model-Based and System-Based Design MATLAB E SIMULINK MATLAB SIMULINK Altri prodotti: Real Time Workshop StateFlow Blocksets (elaborazione numerica dei segnali (DSP),Telecomunicazioni, sistemi
SIMULINK Model-Based and System-Based Design MATLAB E SIMULINK MATLAB SIMULINK Altri prodotti: Real Time Workshop StateFlow Blocksets (elaborazione numerica dei segnali (DSP),Telecomunicazioni, sistemi
Prefazione 3. Ringraziamenti 5
 Indice Prefazione 3 Ringraziamenti 5 1 Introduzione all uso del software di calcolo MATLAB 7 1.1 Caratteristiche del software MATLAB 7 1.2 Nozioni di base del MATLAB 8 1.3 Assegnazione di variabili scalari
Indice Prefazione 3 Ringraziamenti 5 1 Introduzione all uso del software di calcolo MATLAB 7 1.1 Caratteristiche del software MATLAB 7 1.2 Nozioni di base del MATLAB 8 1.3 Assegnazione di variabili scalari
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html INTRODUZIONE A SIMULINK Ing. e-mail:
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html INTRODUZIONE A SIMULINK Ing. e-mail:
MATLAB-SIMULINK. Simulink. Simulazione di un sistema ABS (Anti-lock bracking system) Ing. Alessandro Pisano.
 Ing. Alessandro Pisano.") 1 MATLAB-SIMULINK Simulink Simulazione di un sistema ABS (Anti-lock bracking system) Ing. Alessandro Pisano [email protected] 2 Anti-lock bracking system (ABS) Il sistema anti bloccaggio, meglio noto
1 MATLAB-SIMULINK Simulink Simulazione di un sistema ABS (Anti-lock bracking system) Ing. Alessandro Pisano [email protected] 2 Anti-lock bracking system (ABS) Il sistema anti bloccaggio, meglio noto
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Simulink è l ambiente di programmazione grafico associato al MATLAB.
 è una piattaforma per la simulazione multidominio e la progettazione model-based di sistemi dinamici. Fornisce un ambiente grafico interattivo e librerie di gruppi di blocchi personalizzabili, e può essere
è una piattaforma per la simulazione multidominio e la progettazione model-based di sistemi dinamici. Fornisce un ambiente grafico interattivo e librerie di gruppi di blocchi personalizzabili, e può essere
Ing. Alessandro Pisano
 Guida Introduttiva a SIMULINK Ing. Alessandro Pisano INDICE Introduzione 3 Generalità: librerie e blocchi elementari. 3 Esempio introduttivo: costruzione e visualizzazione di un onda sinusoidale 7 Costruzione
Guida Introduttiva a SIMULINK Ing. Alessandro Pisano INDICE Introduzione 3 Generalità: librerie e blocchi elementari. 3 Esempio introduttivo: costruzione e visualizzazione di un onda sinusoidale 7 Costruzione
PIANO DI LAVORO DEI DOCENTI
 Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Una breve introduzione alla simulazione numerica nei circuiti con PSpice + qualche esempio...
 CdL Telecomunicazioni - Corso di Elettrotecnica Una breve introduzione alla simulazione numerica nei circuiti con PSpice + qualche esempio... Prof. Massimiliano de Magistris Dipartimento di Ingegneria
CdL Telecomunicazioni - Corso di Elettrotecnica Una breve introduzione alla simulazione numerica nei circuiti con PSpice + qualche esempio... Prof. Massimiliano de Magistris Dipartimento di Ingegneria
Fondamenti di Automatica Prof. Giuseppe Oriolo. Introduzione
 Fondamenti di Automatica Prof. Giuseppe Oriolo Introduzione cos è automatica: disciplina che studia le modalità attraverso le quali una sequenza di eventi desiderati avviene in maniera autonoma (Wikipedia)
Fondamenti di Automatica Prof. Giuseppe Oriolo Introduzione cos è automatica: disciplina che studia le modalità attraverso le quali una sequenza di eventi desiderati avviene in maniera autonoma (Wikipedia)
1) Matlab e simulazione. 2) Esempi di utilizzo. Mauro De Sanctis corso di Informazione e Codifica Università di Roma Tor Vergata
 Matlab e simulazione. 2) Esempi di utilizzo. Mauro De Sanctis corso di Informazione e Codifica Università di Roma Tor Vergata") Argomenti della Lezione 1) Matlab e simulazione 2) Esempi di utilizzo 1 Mauro De Sanctis corso di Informazione e Codifica Università di Roma Tor Vergata Matlab è un sistema di programmazione ad alto livello
Argomenti della Lezione 1) Matlab e simulazione 2) Esempi di utilizzo 1 Mauro De Sanctis corso di Informazione e Codifica Università di Roma Tor Vergata Matlab è un sistema di programmazione ad alto livello
Controlli Automatici I
 Ingegneria Elettrica Politecnico di Torino Luca Carlone Controlli Automatici I LEZIONE V Sommario LEZIONE V Proprietà strutturali Controllabilità e raggiungibilità Raggiungibilità nei sistemi lineari Forma
Ingegneria Elettrica Politecnico di Torino Luca Carlone Controlli Automatici I LEZIONE V Sommario LEZIONE V Proprietà strutturali Controllabilità e raggiungibilità Raggiungibilità nei sistemi lineari Forma
Introduzione all utilizzo di Matlab e Simulink. Ing. Andrea Paoli www-lar.deis.unibo.it/~apaoli Tel.
 Introduzione all utilizzo di Matlab e Simulink Ing. Andrea Paoli [email protected] www-lar.deis.unibo.it/~apaoli Tel. (051-20) 93045 1 Cosa è Matlab? Matlab (= Matrix Laboratory) è un linguaggio di
Introduzione all utilizzo di Matlab e Simulink Ing. Andrea Paoli [email protected] www-lar.deis.unibo.it/~apaoli Tel. (051-20) 93045 1 Cosa è Matlab? Matlab (= Matrix Laboratory) è un linguaggio di
Fondamenti di Automatica
 Parte 1, 1 DEEI-Università di Trieste Tel. 335 8294017 Email: [email protected] URL: http://control.units.it Parte 1, 2 ESAMI Solo prova scritta Prove parziali (facoltative ma consigliate ) Iscrizione
Parte 1, 1 DEEI-Università di Trieste Tel. 335 8294017 Email: [email protected] URL: http://control.units.it Parte 1, 2 ESAMI Solo prova scritta Prove parziali (facoltative ma consigliate ) Iscrizione
Oggetto del Corso. Sistema di controllo. Fondamenti di Automatica
 Parte 1, 1 Parte 1, 2 ESAMI Solo prova scritta Prove parziali (facoltative ma consigliate ) Iscrizione elettronica (http://studenti.units.it) CORSI A MONTE Analisi I e II Geometria DEEI-Università di Trieste
Parte 1, 1 Parte 1, 2 ESAMI Solo prova scritta Prove parziali (facoltative ma consigliate ) Iscrizione elettronica (http://studenti.units.it) CORSI A MONTE Analisi I e II Geometria DEEI-Università di Trieste
Controlli Automatici e Teoria dei Sistemi Esempi di sistemi dinamici
 Controlli Automatici e Teoria dei Sistemi Esempi di sistemi dinamici Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica Università di Bologna Viale del Risorgimento 2, 40136
Controlli Automatici e Teoria dei Sistemi Esempi di sistemi dinamici Prof. Roberto Guidorzi Dipartimento di Elettronica, Informatica e Sistemistica Università di Bologna Viale del Risorgimento 2, 40136
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 8. Reti di Petri: rappresentazione algebrica Luigi Piroddi [email protected] Rappresentazione matriciale o algebrica E possibile analizzare
Automazione industriale dispense del corso (a.a. 2008/2009) 8. Reti di Petri: rappresentazione algebrica Luigi Piroddi [email protected] Rappresentazione matriciale o algebrica E possibile analizzare
Esercizi 2, 1. continuo. Modelli in equazioni di stato Linearizzazione. Prof. Thomas Parisini. Fondamenti di Automatica
 Esercizi 2, 1 Esercizi sistemi dinamici a tempo continuo Modelli in equazioni di stato Linearizzazione Equazioni di stato: Esercizi 2, 2 1. Determinare le equazioni di stato per il seguente sistema termico:
Esercizi 2, 1 Esercizi sistemi dinamici a tempo continuo Modelli in equazioni di stato Linearizzazione Equazioni di stato: Esercizi 2, 2 1. Determinare le equazioni di stato per il seguente sistema termico:
U-GOV - RU Simulazione contratto. Versione 0.1 Manuale operativo
 U-GOV - RU Simulazione contratto Versione 0.1 Manuale operativo 1 Indice 1. Creazione Simulazione Contratto... 3 1.1 Dati di testata... 4 1.2 Dati del percipiente... 5 1.3 Dati del Contratto... 6 1.4 Dati
U-GOV - RU Simulazione contratto Versione 0.1 Manuale operativo 1 Indice 1. Creazione Simulazione Contratto... 3 1.1 Dati di testata... 4 1.2 Dati del percipiente... 5 1.3 Dati del Contratto... 6 1.4 Dati
Introduzione al Simulink
 Introduzione al Simulink pag. 1 L ambiente Simulink Simulink è un ambiente grafico per la simulazione di sistemi complessi Simulink è composto da una libreria di blocchi che descrivono elementi statici
Introduzione al Simulink pag. 1 L ambiente Simulink Simulink è un ambiente grafico per la simulazione di sistemi complessi Simulink è composto da una libreria di blocchi che descrivono elementi statici
FREEFEM++ Marcello Bellomi. 18 Aprile Università di Verona FREEFEM++
 18 Aprile 2013 Indice 1) Introduzione 2) Esempio base 3) Sintassi 4) Esempio Part I Indroduzione Dettagli iniziali Risolve problemi in 2D e 3D, creato principalmente per risolvere problemi variazionali
18 Aprile 2013 Indice 1) Introduzione 2) Esempio base 3) Sintassi 4) Esempio Part I Indroduzione Dettagli iniziali Risolve problemi in 2D e 3D, creato principalmente per risolvere problemi variazionali
TEORIA DEI SISTEMI ANALISI DEI SISTEMI LTI
 TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI ANALISI DEI SISTEMI LTI Ing. Cristian
TEORIA DEI SISTEMI Laurea Specialistica in Ingegneria Meccatronica Laurea Specialistica in Ingegneria Gestionale Indirizzo Gestione Industriale TEORIA DEI SISTEMI ANALISI DEI SISTEMI LTI Ing. Cristian
SOLUZIONE della Prova TIPO E per:
 SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
CONTROLLI AUTOMATICI Ingegneria Gestionale MODELLI DI SISTEMI
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm MODELLI DI SISTEMI Ing. Federica Grossi Tel. 059 2056333 e-mail: [email protected]
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm MODELLI DI SISTEMI Ing. Federica Grossi Tel. 059 2056333 e-mail: [email protected]
Silvia Briccoli Bati, Stefano Galassi, Giovanna Ranocchiai. Elementi di calcolo automatico delle strutture intelaiatae
 A08 Silvia Briccoli Bati, Stefano Galassi, Giovanna Ranocchiai Elementi di calcolo automatico delle strutture intelaiatae Il Software FrameMAKER e la relativa guida introduttiva al programma è scaricabile
A08 Silvia Briccoli Bati, Stefano Galassi, Giovanna Ranocchiai Elementi di calcolo automatico delle strutture intelaiatae Il Software FrameMAKER e la relativa guida introduttiva al programma è scaricabile