Il telerilevamento da SAPR/UAV Geometria di volo, Piani di volo
|
|
|
- Giustina Morini
- 5 anni fa
- Visualizzazioni
Transcript




1 DICA - Sez. Geodesia e Geomatica Il telerilevamento da SAPR/UAV Geometria di volo, Piani di volo Dr.ssa Giovanna Sona (prof. Livio Pinto) Lecco,
2 PRINCIPI GENERALI L immagine è una proiezione centrale dello spazio 3D su uno spazio 2D (un piano) Una singola immagine non basta per ricostruire l oggetto (2D 3D) Sono necessarie più immagini per ricostruire l oggetto, mediante intersezione di raggi Almeno 2 immagini, stime migliori con n >2 ridondanza di osservazioni

3 RICOPRIMENTO OGGETTO Gli oggetti di rilievi possono essere molto diversi per posizione e forma ricoprimenti ottenuti in modi diversi Rilievo aereo / Rilievo terrestre Rilievo da UAV? AA

4 RILIEVO AEREO Struttura dei blocchi Ricoprimenti standard : longitudinale: 55-60% trasversale: 10-20% Ricoprimento longitudinale Ricoprimento longitudinale tra 1 e 3 fotogramma : 10-20% Ricoprimento trasversale AA


5 RILIEVI TERRESTRI Non sempre in geometria nadirale Prese nadirali Prese convergenti Occorre sempre una accurata progettazione Acquisizione di dati cartografici perché l oggetto può avere geometrie complicate.
6 PROGETTAZIONE DELLE PRESE: SCELTA DELLA SCALA Il dato di partenza è la scala del modello da realizzare 1/m c : occorre mettere in evidenza il legame tra la scala del modello e quella delle immagini da acquisire 1/m b. Criterio: si deve garantire che la precisione si trasferisca dalle misure sulle immagini al prodotto finale, lungo le fasi del processo produttivo. Esempio dalla fotogrammetria aerea mb k m c Scala carta 1:500 1:1000 1:2000 1:5000 1: : :50000 Scala fotogrammi Min. 1:5000 1:8000 1: : : : :60000 Max. 1:3000 1:4000 1:6000 1: : : :40000
7 RELAZIONI GEOMETRICHE O c l Il fattore di scala dell immagine m b è legato alla geometria interna della camera e alla distanza di presa delle immagini m L l Z c Z c b m b W H Z L2 L1 L Z L1 mb L1 c W W Date le dimensioni del sensore W, H, e l altezza di volo, risulta determinato il rettangolo di ingombro a terra (footprint) dell immagine Z c L 2 H Z c
8 DEFINIZIONE PARAMETRI DI VOLO Quindi, dato il fattore di scala m b, e l obbiettivo utilizzato, si calcola la quota di volo relativa Z (o distanza dall oggetto) Vengono poi definiti i ricoprimenti (overlapping) : Tradizionali in fotogrammetria aerea: Longitudinale (along-strip) m = 60% Trasversale (cross-strip) e =20% N.B : Sovrapposizioni più elevate evitano buchi in caso di variazioni nella quota relativa di volo (h r ) e dell assetto (,, )
9 DEFINIZIONE PARAMETRI DI VOLO Da quota di volo e ricoprimenti si calcolano la base di presa B e la distanza tra gli assi delle strisciate A ( interasse tra strisciate ) B L 2 A L 1 1 m 1 e B;A Con i parametri B ed A, date le dimensioni dell area, si possono calcolare il numero di strisciate e di fotogrammi per strisciata K K2 int 1 1 B Nstr int 1 A 1 Nfot (Kraus) Inoltre vale l ovvia relazione tra la velocità del veicolo v, la base B e l intervallo tra due scatti t L 2 1m t B v
10 DEFINIZIONE PARAMETRI DI VOLO
11 RISOLUZIONE AL SUOLO La geometria esterna della presa insieme con la geometria interna del sensore definiscono le proporzioni per la formazione dell immagine c La stessa proporzione vale per il singolo pixel : GSD (IFOV) m b Z c L1 W GSD d pix GSD d pix Z c Z AA
12 PRECISIONI GEOMETRICHE - PROPAGAZIONE ERRORI Occorre sapere come la precisione geometrica si trasferisce dalle misure sulle immagini al prodotto finale (carta, modello) Caso normale = nadirale, immagini complanari e parallele (valori nulli dei 3 angoli di assetto) c Z O 1 B O 2 P' 1 P' 2 X (caso vicino al rilievo aereo/dall alto di un terreno prevalentemente piano) -Z 1 2 Le equazioni di collinearità e di intersezione risultano semplificate P E più semplice lo studio delle precisioni teoriche in funzione dei parametri geometrici del rilievo 12
13 AA ERRORI nel CASO NORMALE Propagazione degli errori DEF: fattore di scala (medio) Z/c = mb rapporto di base B/Z -Z c Z O 1 B O P' P' X P 2 2 P 2 1 b X B Z c m 2 2 P 2 1 b Y B Z c m p b Z B Z m la profondità è la coordinata più svantaggiata. z =Z 2 * p /(B*c)
14 ERRORI nel CASO NORMALE Esempio : c = 150mm, p 5mm,, 7mm, =50mm A scala immagine fissata, Z è inversamente proporzionale al rapporto di base B/Z; Ma X e Y crescono lentamente con B/Z ; quindi se B/Z è appena sotto 1:1 X, Y, Z hanno la stessa accuratezza B/Z = 1:1 B/Z = 1:3 B/Z = 1:10 B/Z = 1:20 m b XY Z XY Z XY Z XY Z m m dm dm 1000 cm cm 100 mm mm Per B/Z fissato, X Y Z sono direttamente proporzionali al fattore di scala, in teoria è quindi possibile ottenere qualsiasi accuratezza, scegliendo la scala adeguata 25 mm mm AA
15 Ricoprimenti nel caso di terreno non piano o prese non nadirali AA
16 PROGETTO RILIEVO CON UAV In un rilievo da UAV dall alto, le relazioni geometriche non cambiano sostanzialmente. Cambia la scala delle immagini, ma la maggior parte dei parametri da fissare e da calcolare sono analoghi. La scala del modello da produrre, le accuratezze richieste e la distanza dall oggetto sono i parametri determinanti. I parametri dipendono dal tipo di oggetto, dallo scopo del rilievo e dagli strumenti utilizzati per il rilievo. I rilievi sono effettuati a distanze più ravvicinate, con aeromobili meno stabili rispetto ad un aereo Ricoprimenti più elevati AA

 orientabili - Ala fissa: si inclina (un poco) il veicolo L2 L1")
17 PROGETTO RILIEVO CON UAV Sensori rettangolari: - scelta direzione di utilizzo cambiano ricoprimenti, ingombro a terra, strisciate W H Possibili prese inclinate: - Multirotore: sensori montati su cestelli (gimbal) orientabili - Ala fissa: si inclina (un poco) il veicolo L2 L1 AA
 ricoprimento 60% ricoprimento 80% Base B= (1-L)Z/c 7.80 m 3.90 m Z 0.035 m 0.")
18 VOLO CON UAV - PRECISIONI ATTESE Regole classiche della fotogrammetria: Es : volo a 30m camera mirrorless sensore 13mm x 17.3mm (3000x4000 pixel) Focale 20mm d PIXEL mm/pixel p mm Z/c 1500 GSD 6.5 mm (0.007 m) ricoprimento 60% ricoprimento 80% Base B= (1-L)Z/c 7.80 m 3.90 m Z m m Ricoprimenti elevati riducono B e quindi Z
19 PROGETTO RILIEVO CON UAV Entrano in gioco anche altri fattori : Modalità acquisizione (volo continuo, rallentamento o stazionamento sui punti di presa) Frequenza di acquisizione (frame, frequenze, scansioni, video ) Autonomia di volo / batterie Payload ( più sensori insieme / più voli e coregistrazione dati) Trascinamento (Image Motion) uth u th vt c Z vt m b v c O t = tempo di esposizione Z AA


20 PROGETTO DI VOLO FOGLIO DI CALCOLO

 LEA")

21 ESEMPI DI VOLI Modelli 3d di edifici Hexakopter Mikrokopter con sistema di navigazione NAV Flight Control, GPS (MKGPS) LEA 4H Ublox. Raggio di operatività : 200m payload: Nikon J1 Modello 3D



22 ESEMPI DI VOLI Ricostruzione campanile Camera inclinata a 45

 : 500m")

23 ESEMPI DI VOLI Immagine del rilievo Modello 3D Rilievo da pallone di fontana monumentale in piazza Leonardo da Vinci Balloon starter kit gonfiato ad elio. Raggio di operatività (lunghezza cavo ancoraggio) : 500m payload: Nikon Coolpix Rilievo con finalità didattiche realizzato durante il corso di fotogrammetria con attrezzatura «low-cost».

![La dimensione dei segnali dipende dalla scala dell immagine, quindi dal GSD d [ cm] m b 300 600 ESEMPI (da](/docs-images/93/114512756/images/24-3.jpg "fotogrammetria aerea) Scala immagine 1:30.000 dimensione 50100cm, Scala immagine 1:4000 dimensione 714 cm.")
24 PROGETTAZIONE DEI SEGNALI Se scarseggiano punti naturali ben definiti, occorre distribuire prima del volo segnali di dimensione, colore, e materiale opportuno. La dimensione dei segnali dipende dalla scala dell immagine, quindi dal GSD d [ cm] m b ESEMPI (da fotogrammetria aerea) Scala immagine 1: dimensione 50100cm, Scala immagine 1:4000 dimensione 714 cm. Segnali per volo con UAV: dell ordine di 5-20 GSD (pixel/cm)

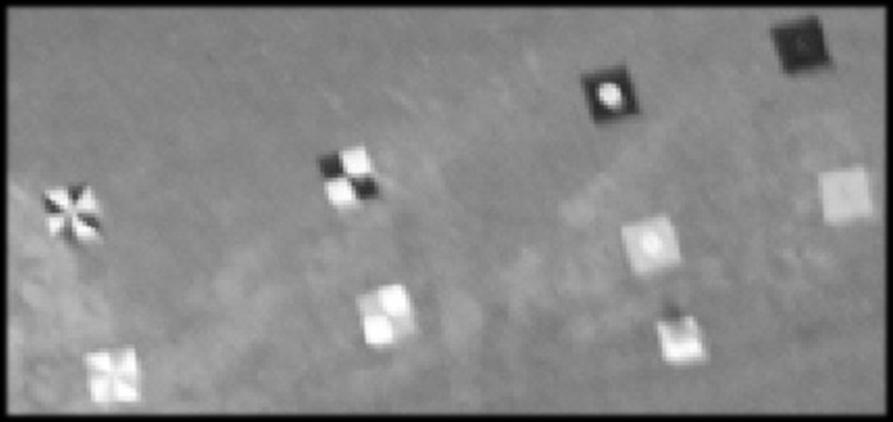
25 TEST su SEGNALI RGB CIR





26 I SENSORI SPORTSCAM COMPATTE MIRRORLESS REFLEX Operare con ottica bloccata no zoom, no autofocus, focale fissa

27 I SENSORI

28 STUDIO RISOLUZIONI EFFETTIVE


29 OTTURATORI : ROLLING SHUTTER ROLLING SHUTTER: modo con cui alcuni sensori (CMOS) acquisiscono le immagini. La singola foto non è registrata esattamente nello stesso istante ma viene scansionata linea per linea, verticalmente o orizzontalmente shear immagini affette da disturbi se soggetto/camera si muovono velocemente camera montata su UAV, posto su carrello spinto a velocità costante: vibrazioni perpendicolari a direzione di acquisizione delle righe wobble
30 GRAZIE PER L ATTENZIONE
Rilievi con UAS per generazione di modelli 3D del territorio Casi applicativi: cave, frane, recupero di beni culturali, impianti, edifici e strade
 DICA - Sez. Geodesia e Geomatica Rilievi con UAS per generazione di modelli 3D del territorio Casi applicativi: cave, frane, recupero di beni culturali, impianti, edifici e strade D. Passoni IL GRUPPO
DICA - Sez. Geodesia e Geomatica Rilievi con UAS per generazione di modelli 3D del territorio Casi applicativi: cave, frane, recupero di beni culturali, impianti, edifici e strade D. Passoni IL GRUPPO
Rilievi da UAV per il monitoraggio del territorio. 6 novembre 2015 - Ecomondo. D. Passoni. DICA - Sez. Geodesia e Geomatica
 DICA - Sez. Geodesia e Geomatica DICCA - Dipartimento di Ingegneria Civile, Chimica e Ambientale Rilievi da UAV per il monitoraggio del territorio 6 novembre 2015 - Ecomondo D. Passoni IL GRUPPO DI LAVORO
DICA - Sez. Geodesia e Geomatica DICCA - Dipartimento di Ingegneria Civile, Chimica e Ambientale Rilievi da UAV per il monitoraggio del territorio 6 novembre 2015 - Ecomondo D. Passoni IL GRUPPO DI LAVORO
Workshop droni e tecnologie innovative Alex Fabbro At-To drones S.r.l.
 Workshop droni e tecnologie innovative Alex Fabbro At-To drones S.r.l. Aerofotogrammetria Dettagli costruttivi Aerofotogrammetria con SAPR Introduzione Al-To Drones Srl 2 Introduzione Lunghezza focale
Workshop droni e tecnologie innovative Alex Fabbro At-To drones S.r.l. Aerofotogrammetria Dettagli costruttivi Aerofotogrammetria con SAPR Introduzione Al-To Drones Srl 2 Introduzione Lunghezza focale
Immagini satellitari ad alta risoluzione
 Immagini satellitari ad alta risoluzione Caratteristiche dei prodotti disponibili Possibile utilizzo per scopi cartografici Cenno al procedimento di ortorettifica in collaborazione con Università degli
Immagini satellitari ad alta risoluzione Caratteristiche dei prodotti disponibili Possibile utilizzo per scopi cartografici Cenno al procedimento di ortorettifica in collaborazione con Università degli
Rilievi con UAS per generazione di modelli 3D del territorio: il progetto ITACA
 DICA - Sez. Geodesia e Geomatica Rilievi con UAS per generazione di modelli 3D del territorio: il progetto ITACA L. Pinto, G. Sona, D. Passoni IL GRUPPO DI LAVORO 2 Ing. Diana Pagliari Ing. Rossana Gini
DICA - Sez. Geodesia e Geomatica Rilievi con UAS per generazione di modelli 3D del territorio: il progetto ITACA L. Pinto, G. Sona, D. Passoni IL GRUPPO DI LAVORO 2 Ing. Diana Pagliari Ing. Rossana Gini
L utilizzo di mezzi UAS (Unmanned Aircraft System) nella Geomatica
 nella Geomatica") L utilizzo di mezzi UAS (Unmanned Aircraft System) nella Geomatica Marco Dubbini mdubbini@salengineering.it Principali Sensori per la Geomatica Fotogrammetrici LIDAR Termici Multispettrali Iperspettrali
L utilizzo di mezzi UAS (Unmanned Aircraft System) nella Geomatica Marco Dubbini mdubbini@salengineering.it Principali Sensori per la Geomatica Fotogrammetrici LIDAR Termici Multispettrali Iperspettrali
Valutazioni metriche di piattaforme UAV per rilievi e modellazioni 3D
 Valutazioni metriche di piattaforme UAV per rilievi e modellazioni 3D M. Lo Brutto, A. Garraffa Dipartimento di Ingegneria Civile, Ambientale, Aerospaziale, dei Materiali (DICAM) Università di Palermo
Valutazioni metriche di piattaforme UAV per rilievi e modellazioni 3D M. Lo Brutto, A. Garraffa Dipartimento di Ingegneria Civile, Ambientale, Aerospaziale, dei Materiali (DICAM) Università di Palermo
Laboratorio di Ottica, Spettroscopia, Astrofisica
 Università degli Studi di Palermo Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Progetto Lauree Scientifiche Laboratorio di Ottica, Spettroscopia, Astrofisica Antonio Maggio
Università degli Studi di Palermo Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Progetto Lauree Scientifiche Laboratorio di Ottica, Spettroscopia, Astrofisica Antonio Maggio
Vittorio Casella. Laboratorio di Geomatica - DICAR Università di Pavia email: vittorio.casella@unipv.it
 Vittorio Casella Laboratorio di Geomatica - DICAR Università di Pavia email: vittorio.casella@unipv.it Come si pianifica un rilievo fotogrammetrico da drone Dronitaly, 25-26 settembre 2015 ATA Hotel EXPO
Vittorio Casella Laboratorio di Geomatica - DICAR Università di Pavia email: vittorio.casella@unipv.it Come si pianifica un rilievo fotogrammetrico da drone Dronitaly, 25-26 settembre 2015 ATA Hotel EXPO
Francesca Berardi. Classe IV MONTESSORI. Una ricerca. La fotografia
 Francesca Berardi Classe IV MONTESSORI Una ricerca La fotografia Per scattare una buona foto, occorre molto più che premere un pulsante. Bisogna imparare ad usare la macchina fotografica e a gestire la
Francesca Berardi Classe IV MONTESSORI Una ricerca La fotografia Per scattare una buona foto, occorre molto più che premere un pulsante. Bisogna imparare ad usare la macchina fotografica e a gestire la
Vittorio Casella. Laboratorio di Geomatica - DICAR Università di Pavia email: vittorio.casella@unipv.it
 Vittorio Casella Laboratorio di Geomatica - DICAR Università di Pavia email: vittorio.casella@unipv.it L'impiego dei droni per lo svolgimento delle attività professionali. Qualità e affidabilità delle
Vittorio Casella Laboratorio di Geomatica - DICAR Università di Pavia email: vittorio.casella@unipv.it L'impiego dei droni per lo svolgimento delle attività professionali. Qualità e affidabilità delle
RILIEVO FOTOGRAMMETRICO 3D CON IMMAGINI DIGITALI ACQUISITE CON DRONE E GOPRO
 RILIEVO FOTOGRAMMETRICO 3D CON IMMAGINI DIGITALI ACQUISITE CON DRONE E GOPRO PRINCIPI TEORICI La fotogrammetria è una tecnica di rilievo che permette di ottenere dati metrici di un qualsiasi oggetto (forma
RILIEVO FOTOGRAMMETRICO 3D CON IMMAGINI DIGITALI ACQUISITE CON DRONE E GOPRO PRINCIPI TEORICI La fotogrammetria è una tecnica di rilievo che permette di ottenere dati metrici di un qualsiasi oggetto (forma
Rilievi con UAS per applicazioni fotogrammetriche: generazione di modelli 3D di costruzioni e del territorio
 DICA - Sez. Geodesia e Geomatica Rilievi con UAS per applicazioni fotogrammetriche: generazione di modelli 3D di costruzioni e del territorio L. Pinto, G. Sona IL GRUPPO DI LAVORO 2 Ing. Diana Pagliari
DICA - Sez. Geodesia e Geomatica Rilievi con UAS per applicazioni fotogrammetriche: generazione di modelli 3D di costruzioni e del territorio L. Pinto, G. Sona IL GRUPPO DI LAVORO 2 Ing. Diana Pagliari
/// RDE COMPANY SRL. SAVE 2007 Fiera di Verona 23 Ottobre 2007. Ing. Gabriele Bomba Ing. Michele Paolino
 Metodologia per il controllo di qualità nelle macchine automatiche attraverso l uso di tecnologie per la scansione laser tridimensionale. SAVE 2007 Fiera di Verona 23 Ottobre 2007 Ing. Gabriele Bomba Ing.
Metodologia per il controllo di qualità nelle macchine automatiche attraverso l uso di tecnologie per la scansione laser tridimensionale. SAVE 2007 Fiera di Verona 23 Ottobre 2007 Ing. Gabriele Bomba Ing.
Strumenti innovativi a basso costo per l acquisizione di informazioni territoriali
 POLITECNICO DI TORINO Dipartimento di Ingegneria dell Ambiente, del Territorio e delle Infrastrutture Strumenti innovativi a basso costo per l acquisizione di informazioni territoriali Andrea LINGUA Marco
POLITECNICO DI TORINO Dipartimento di Ingegneria dell Ambiente, del Territorio e delle Infrastrutture Strumenti innovativi a basso costo per l acquisizione di informazioni territoriali Andrea LINGUA Marco
LA MISURA DI GRANDI DISTANZE CON LA TRIANGOLAZIONE
 L MISUR DI GRNDI DISTNZE ON L TRINGOLZIONE ome si può misurare l altezza di un lampione senza doversi arrampicare su di esso? Se è una giornata di sole, è possibile sfruttare l ombra del lampione. on un
L MISUR DI GRNDI DISTNZE ON L TRINGOLZIONE ome si può misurare l altezza di un lampione senza doversi arrampicare su di esso? Se è una giornata di sole, è possibile sfruttare l ombra del lampione. on un
DESCR I ZI ONE TECNICA T H160 DESCRIZIONE
 DESCRIZIONE LA PIATTAFORMA AEREA TH 160 E UNO DEI PRODOTTI, PIU VERSATILI E MANEGGEVOLI PER I RIDOTTI INGOMBRI, REALIZZATI DALLA SUP PIATTAFORME AEREE. LA TH 160 E REALIZZABILE SU CABINATO NISSAN CAB STAR
DESCRIZIONE LA PIATTAFORMA AEREA TH 160 E UNO DEI PRODOTTI, PIU VERSATILI E MANEGGEVOLI PER I RIDOTTI INGOMBRI, REALIZZATI DALLA SUP PIATTAFORME AEREE. LA TH 160 E REALIZZABILE SU CABINATO NISSAN CAB STAR
Leica DISTO D8. Il versatile, per interni ed esterni
 Leica DISTO D8 Il versatile, per interni ed esterni Nuovo Leica DISTO D8 Mirino Digitale(zoom 4x) Ampio display a colori (2,4 TFT) 360 inclinometro integrato Tecnologia Bluetooth 2 Caratteristiche Vantaggi
Leica DISTO D8 Il versatile, per interni ed esterni Nuovo Leica DISTO D8 Mirino Digitale(zoom 4x) Ampio display a colori (2,4 TFT) 360 inclinometro integrato Tecnologia Bluetooth 2 Caratteristiche Vantaggi
Integrazione di sensori nei Mobile Mapping Systems. Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007
 Integrazione di sensori nei Mobile Mapping Systems Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007 IL veicolo vincitore nel 2005 del Stanford Racing Team era dotato di: - 5 laser scanners
Integrazione di sensori nei Mobile Mapping Systems Corso di Metodologie Topografiche per l Ingegneria A.A. 2006/2007 IL veicolo vincitore nel 2005 del Stanford Racing Team era dotato di: - 5 laser scanners
Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine
 Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine di Philip Cheng Per molti anni la camera a pellicola aerotrasportata è stata la miglior scelta per l acquisizione di foto
Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine di Philip Cheng Per molti anni la camera a pellicola aerotrasportata è stata la miglior scelta per l acquisizione di foto
Catasto Informatizzato delle Strade e Nuove Tecnologie di Rilevamento Dati
 I GIS per le Infrastrutture, la Mobilità e la Sicurezza Stradale Catasto Informatizzato delle Strade e Nuove Tecnologie di Rilevamento Dati Palazzo delle Stelline - Milano, 18 Novembre 2009 24/11/2009
I GIS per le Infrastrutture, la Mobilità e la Sicurezza Stradale Catasto Informatizzato delle Strade e Nuove Tecnologie di Rilevamento Dati Palazzo delle Stelline - Milano, 18 Novembre 2009 24/11/2009
Dalla TOPOGRAFIA alla GEOMATICA
 SEMINARIO 2b Dalla TOPOGRAFIA alla GEOMATICA SCANSIONE LASER E RILIEVI PER IMMAGINI Paolo Aminti - Valentina Bonora - Andrea Lingua Fulvio Rinaudo - CS SIFET SOCIETA ITALIANA DI FOTOGRAMMETRIA E TOPOGRAFIA
SEMINARIO 2b Dalla TOPOGRAFIA alla GEOMATICA SCANSIONE LASER E RILIEVI PER IMMAGINI Paolo Aminti - Valentina Bonora - Andrea Lingua Fulvio Rinaudo - CS SIFET SOCIETA ITALIANA DI FOTOGRAMMETRIA E TOPOGRAFIA
o i Π = Π La forma generale è: n1/o + nu/i = n1/f1 = nu/f2 dove nu = indice di rifrazione dell ultimo mezzo Pertanto f1/f2 = n1/nu 1
 Richiami di ottica geometrica: Sistema diottrico: successione di mezzi omogenei, diversamente rifrangenti, in genere delimitati da superfici sferiche Centrato: i centri di curvatura giacciono sull asse
Richiami di ottica geometrica: Sistema diottrico: successione di mezzi omogenei, diversamente rifrangenti, in genere delimitati da superfici sferiche Centrato: i centri di curvatura giacciono sull asse
Ruote dentate elicoidali e loro controllo con micrometro a piattelli
 Ruote dentate elicoidali e loro controllo con micrometro a piattelli Nella ruota dentata cilindrica a denti elicoidali le linee dei fianchi, essendo delle eliche, sono inclinate di un angolo β rispetto
Ruote dentate elicoidali e loro controllo con micrometro a piattelli Nella ruota dentata cilindrica a denti elicoidali le linee dei fianchi, essendo delle eliche, sono inclinate di un angolo β rispetto
Procedure d orientamento d immagini: Test e Valutazioni Metriche
 Low Cost 3D WORKSHOP Trento 8-9 Marzo 2012 Procedure d orientamento d immagini: Test e Valutazioni Metriche Silvio Del Pizzo, Fabio Remondino, Salvatore Troisi Introduzione alla problematica Software open
Low Cost 3D WORKSHOP Trento 8-9 Marzo 2012 Procedure d orientamento d immagini: Test e Valutazioni Metriche Silvio Del Pizzo, Fabio Remondino, Salvatore Troisi Introduzione alla problematica Software open
Dimensionamento delle strutture
 Dimensionamento delle strutture Prof. Fabio Fossati Department of Mechanics Politecnico di Milano Lo stato di tensione o di sforzo Allo scopo di caratterizzare in maniera puntuale la distribuzione delle
Dimensionamento delle strutture Prof. Fabio Fossati Department of Mechanics Politecnico di Milano Lo stato di tensione o di sforzo Allo scopo di caratterizzare in maniera puntuale la distribuzione delle
Ministero dell Interno
 Il Comitato Tecnico Permanente, istituito presso il Ministero dell Interno con DM 20.3.2003, nella seduta del 31 luglio 2007, ha approvato la lista dei requisiti minimi hardware e software delle stazioni
Il Comitato Tecnico Permanente, istituito presso il Ministero dell Interno con DM 20.3.2003, nella seduta del 31 luglio 2007, ha approvato la lista dei requisiti minimi hardware e software delle stazioni
MISURATORI LASER. stanley.it
 MISURATORI LASER stanley.it PER LE TUE MISURAZIONI PROFESSIONALI AFFIDATI A STANLEY La precisione nelle misurazioni è essenziale per qualsiasi tipo di lavoro. La gamma di misuratori laser STANLEY è stata
MISURATORI LASER stanley.it PER LE TUE MISURAZIONI PROFESSIONALI AFFIDATI A STANLEY La precisione nelle misurazioni è essenziale per qualsiasi tipo di lavoro. La gamma di misuratori laser STANLEY è stata
Attività di ricerca congiunta sulle tecnologie UAV/RPAS all Università di Udine
 Attività di ricerca congiunta sulle tecnologie UAV/RPAS all Università di Udine D. Zorzetto (Airmap,Trieste) A.Fusiello, A. Beinat, F. Crosilla (Università di Udine) R.Toldo (3DFlow, Udine/Verona) S. Orlando
Attività di ricerca congiunta sulle tecnologie UAV/RPAS all Università di Udine D. Zorzetto (Airmap,Trieste) A.Fusiello, A. Beinat, F. Crosilla (Università di Udine) R.Toldo (3DFlow, Udine/Verona) S. Orlando
RILIEVO E MODELLAZIONE 3D PER I BENI CULTURALI
 RILIEVO E MODELLAZIONE 3D PER I BENI CULTURALI PERCHE' 3D? Documentazione e analisi di contesti archeologici Conservazione digitale e tutela Divulgazione (filmati / realtà virtuale) GIS RILIEVO 3D Misura
RILIEVO E MODELLAZIONE 3D PER I BENI CULTURALI PERCHE' 3D? Documentazione e analisi di contesti archeologici Conservazione digitale e tutela Divulgazione (filmati / realtà virtuale) GIS RILIEVO 3D Misura
Liceo Classico Statale Dante Alighieri
 Liceo Classico Statale Dante Alighieri via E. Q. Visconti, 13 - ROMA - PIANO ANNUALE DI LAVORO Anno scolastico 2015/16 Docente: Cristina Zeni Disciplina: MATEMATICA Classe: 4C Ore settimanali: 2 1. ANALISI
Liceo Classico Statale Dante Alighieri via E. Q. Visconti, 13 - ROMA - PIANO ANNUALE DI LAVORO Anno scolastico 2015/16 Docente: Cristina Zeni Disciplina: MATEMATICA Classe: 4C Ore settimanali: 2 1. ANALISI
Guida a croce LM Tipo CSR
 Guida a croce LM Tipo CSR Rotaia LM Tenuta frontale Frontale di ricircolo Sfere Lamierino di trattenuta delle sfere Nipplo ingrassatore Carrello LM Tenuta laterale Rotaia LM Figura 1: Struttura della guida
Guida a croce LM Tipo CSR Rotaia LM Tenuta frontale Frontale di ricircolo Sfere Lamierino di trattenuta delle sfere Nipplo ingrassatore Carrello LM Tenuta laterale Rotaia LM Figura 1: Struttura della guida
Sintesi dei pun+ principali tra0a+ nelle schede di lavoro di Geometria
 Sintesi dei pun+ principali tra0a+ nelle schede di lavoro di Geometria Le schede fanno rifle0ere su aspe9 cruciali, me0endo in discussione misconcezioni che possono essere presen+ Le schede, inoltre, suggeriscono
Sintesi dei pun+ principali tra0a+ nelle schede di lavoro di Geometria Le schede fanno rifle0ere su aspe9 cruciali, me0endo in discussione misconcezioni che possono essere presen+ Le schede, inoltre, suggeriscono
Come si orienta un blocco fotogrammetrico
 Come si orienta un blocco fotogrammetrico Marica Franzini DICAR Università degli Studi di Pavia Marica Franzini DRONITALY 25-26 settembre 2015 Milano - Pag. 1 a 45 La misura fotogrammetrica La misura fotogrammetrica
Come si orienta un blocco fotogrammetrico Marica Franzini DICAR Università degli Studi di Pavia Marica Franzini DRONITALY 25-26 settembre 2015 Milano - Pag. 1 a 45 La misura fotogrammetrica La misura fotogrammetrica
un marchio di FlightTech Italia
 un marchio di FlightTech Italia I DRONI A COSA SERVONO?? VIDEO & FOTO TURISMO ARTE & CULTURA EVENTI INDUSTRIA INGEGNERIA SICUREZZA Video & Foto Riprese video fluide e da punti di vista finora impensati
un marchio di FlightTech Italia I DRONI A COSA SERVONO?? VIDEO & FOTO TURISMO ARTE & CULTURA EVENTI INDUSTRIA INGEGNERIA SICUREZZA Video & Foto Riprese video fluide e da punti di vista finora impensati
PROMUOVE. CICLO DI SEMINARI (5 moduli)
") Con il Patrocinio L ORDINE DEGLI INGEGNERI DELLA PROVINCIA DI MONZA E DELLA BRIANZA PROMUOVE 6 CFP x MODULO CICLO DI SEMINARI (5 moduli) Settori: STRADALE, INFRASTRUTTURALE, TERRITORIALE, SICUREZZA PUBBLICA
Con il Patrocinio L ORDINE DEGLI INGEGNERI DELLA PROVINCIA DI MONZA E DELLA BRIANZA PROMUOVE 6 CFP x MODULO CICLO DI SEMINARI (5 moduli) Settori: STRADALE, INFRASTRUTTURALE, TERRITORIALE, SICUREZZA PUBBLICA
Alimentazione. Compatibilità
 Configurazione Lo scanner Z+F IMAGER 5006h garantisce la massima mobilità. Costruito secondo i criteri di operatività stand-alone, lo scanner è dotato di un display, di batteria ricaricabile, di un hard
Configurazione Lo scanner Z+F IMAGER 5006h garantisce la massima mobilità. Costruito secondo i criteri di operatività stand-alone, lo scanner è dotato di un display, di batteria ricaricabile, di un hard
Sistema MSP. Hilti. Passione. Performance.
 Sistema MSP Hilti. Passione. Performance. Prodotti Ganci per tetto MSP-RH Pagina 204 Ganci per tetto MSP-RH-A Pagina 205 Gancio per tetto MSP-RH-B Pagina 205 Gancio per tetto MSP-RH-S Pagina 206 Gancio
Sistema MSP Hilti. Passione. Performance. Prodotti Ganci per tetto MSP-RH Pagina 204 Ganci per tetto MSP-RH-A Pagina 205 Gancio per tetto MSP-RH-B Pagina 205 Gancio per tetto MSP-RH-S Pagina 206 Gancio
Qual è la differenza fra la scala Celsius e la scala assoluta delle temperature?
 ISTITUTO DI ISTRUZIONE SECONDARIA DANIELE CRESPI Liceo Internazionale Classico e Linguistico VAPC02701R Liceo delle Scienze Umane VAPM027011 Via G. Carducci 4 21052 BUSTO ARSIZIO (VA) www.liceocrespi.it-tel.
ISTITUTO DI ISTRUZIONE SECONDARIA DANIELE CRESPI Liceo Internazionale Classico e Linguistico VAPC02701R Liceo delle Scienze Umane VAPM027011 Via G. Carducci 4 21052 BUSTO ARSIZIO (VA) www.liceocrespi.it-tel.
Dalla Camera obscura(oscura) alla Reflex
 alla Reflex") Dalla Camera obscura(oscura) alla Reflex Introduzione La camera oscura o camera Obscura La prima foto Le sostanze fotosensibili e i processi Le compatte analogico / digitale Le Bridge Le Mirrorless Le
Dalla Camera obscura(oscura) alla Reflex Introduzione La camera oscura o camera Obscura La prima foto Le sostanze fotosensibili e i processi Le compatte analogico / digitale Le Bridge Le Mirrorless Le
Funzioni di base del rilevatore di difetti universale GEKKO
 GEKKO Descrizione Prodotto Rilevatore di difetti ad ultrasuoni portatile con tecnologia Phased Array, TOFD e tecniche di ispezione con Ultrasuoni convenzionali. Funzioni di base del rilevatore di difetti
GEKKO Descrizione Prodotto Rilevatore di difetti ad ultrasuoni portatile con tecnologia Phased Array, TOFD e tecniche di ispezione con Ultrasuoni convenzionali. Funzioni di base del rilevatore di difetti
Martina Agazzi. Corso di Tecniche plastiche contemporanee. Prof. Carlo Lanzi
 Martina Agazzi Corso di Tecniche plastiche contemporanee Prof. Carlo Lanzi RILEVAMENTO 3D DI UN OGGETTO ARTISTICO (SCULTURA) Luce strutturata Dispositivo portatile, facilmente trasportabile digitalizzazione
Martina Agazzi Corso di Tecniche plastiche contemporanee Prof. Carlo Lanzi RILEVAMENTO 3D DI UN OGGETTO ARTISTICO (SCULTURA) Luce strutturata Dispositivo portatile, facilmente trasportabile digitalizzazione
1 INTRODUZIONE... 3 2 CORSE DISPONIBILI... 3 3 STRUTTURA DEL MODULO LINEARE... 3 4 PRESTAZIONI E SPECIFICHE... 4
 Catalogo moduli lineari GHR Catalogo moduli lineari GHR 1 INTRODUZIONE... 3 2 CORSE DISPONIBILI... 3 3 STRUTTURA DEL MODULO LINEARE... 3 4 PRESTAZIONI E SPECIFICHE... 4 5 MOMENTI AMMISSIBILI SUL CARRELLO...
Catalogo moduli lineari GHR Catalogo moduli lineari GHR 1 INTRODUZIONE... 3 2 CORSE DISPONIBILI... 3 3 STRUTTURA DEL MODULO LINEARE... 3 4 PRESTAZIONI E SPECIFICHE... 4 5 MOMENTI AMMISSIBILI SUL CARRELLO...
Il telerilevamento in agricoltura: nuove prospettive dai sistemi UAV (Unmanned Aerial Vehicle)
") Il telerilevamento in agricoltura: nuove prospettive dai sistemi UAV (Unmanned Aerial Vehicle) Alessandro Matese, Jacopo Primicerio WORKSHOP SISTEMI INNOVATIVI PER IL FLOROVIVAISMO E UN AGRICOLTURA DI
Il telerilevamento in agricoltura: nuove prospettive dai sistemi UAV (Unmanned Aerial Vehicle) Alessandro Matese, Jacopo Primicerio WORKSHOP SISTEMI INNOVATIVI PER IL FLOROVIVAISMO E UN AGRICOLTURA DI
Società alpina delle Giulie Sezione di Trieste del Club Alpino Italiano. Topografia e orientamento
 Società alpina delle Giulie Sezione di Trieste del Club Alpino Italiano Topografia e orientamento Introduzione Per un alpinista sapersi orientare in montagna è altrettanto importante che saper arrampicare
Società alpina delle Giulie Sezione di Trieste del Club Alpino Italiano Topografia e orientamento Introduzione Per un alpinista sapersi orientare in montagna è altrettanto importante che saper arrampicare
Esercizio 2 Si consideri la funzione f definita dalle seguenti condizioni: e x. per x 1 f(x) = α x + e 1 per 1 < x
 = α x + e 1 per 1 < x") FUNZIONI Esercizio 1 Studiare la funzione f(x) = ln ( ) x e disegnarne il grafico. x 1 Esercizio 2 Si consideri la funzione f definita dalle seguenti condizioni: { e x per x 1 f(x) = α x + e 1 per 1
FUNZIONI Esercizio 1 Studiare la funzione f(x) = ln ( ) x e disegnarne il grafico. x 1 Esercizio 2 Si consideri la funzione f definita dalle seguenti condizioni: { e x per x 1 f(x) = α x + e 1 per 1
5000LR. Data logger in miniatura. La Registrazione Semplice e Versatile! Compatti e Discreti con ampia memoria interna. mod. 5001LR.
 5000LR Data logger in miniatura Data Logger mod. 5001LR La Registrazione Semplice e Versatile! Compatti e Discreti con ampia memoria interna Il punto di partenza nel mondo la registrazione I data logger
5000LR Data logger in miniatura Data Logger mod. 5001LR La Registrazione Semplice e Versatile! Compatti e Discreti con ampia memoria interna Il punto di partenza nel mondo la registrazione I data logger
Verifica Geometrica Macchine Utensili
 OPTODYNE OPTODYNE Laser Metrology S.r.l. Via Veneto, 5 20044 Bernareggio (MI) ITALY TEL ++ 39-039 60 93 618 Email OPTODYNE@tin.it FAX ++ 39-039 6800 147 WWW.OPTODYNE.COM WWW.HAMARLASER.IT P. IVA - C.F.
OPTODYNE OPTODYNE Laser Metrology S.r.l. Via Veneto, 5 20044 Bernareggio (MI) ITALY TEL ++ 39-039 60 93 618 Email OPTODYNE@tin.it FAX ++ 39-039 6800 147 WWW.OPTODYNE.COM WWW.HAMARLASER.IT P. IVA - C.F.
PROBLEMI DI SCELTA dipendenti da due variabili d azione
 prof. Guida PROBLEMI DI SCELTA dipendenti da due variabili d azione in un problema di programmazione lineare, si ricorda che la funzione obiettivo z=f(x,y)=ax+by+c assume il suo valore massimo (o minimo)
prof. Guida PROBLEMI DI SCELTA dipendenti da due variabili d azione in un problema di programmazione lineare, si ricorda che la funzione obiettivo z=f(x,y)=ax+by+c assume il suo valore massimo (o minimo)
Istituto Professionale di Stato per l Industria e l Artigianato Giancarlo Vallauri. Classi I C I G
 Esercizi Estivi di Matematica a.s. 0/04 Istituto Professionale di Stato per l Industria e l Artigianato Giancarlo Vallauri Classi I C I G ALUNNO CLASSE Ulteriore ripasso e recupero anche nei siti www.vallauricarpi.it
Esercizi Estivi di Matematica a.s. 0/04 Istituto Professionale di Stato per l Industria e l Artigianato Giancarlo Vallauri Classi I C I G ALUNNO CLASSE Ulteriore ripasso e recupero anche nei siti www.vallauricarpi.it
Un prototipo di 3D scanner
 Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Leica DISTO D3a / BT Misure rivoluzionarie e precise
 Leica DISTO Da / BT Misure rivoluzionarie e precise Leica DISTO Da È davvero così preciso? Con una precisione di misura di ±,0 mm Leica DISTO Da garantisce misure perfette con la semplice pressione di
Leica DISTO Da / BT Misure rivoluzionarie e precise Leica DISTO Da È davvero così preciso? Con una precisione di misura di ±,0 mm Leica DISTO Da garantisce misure perfette con la semplice pressione di
Carrelli Elevatori Termici 3.5-5.0 t
 Carrelli Elevatori Termici 3.5-5.0 t 7FG/7FD www.toyota-forklifts.it Carrelli Elevatori Termici 3.5 t Caratteristiche tecniche principali 02-7FG35 42-7FD35 1.1 Costruttore Toyota Toyota 1.2 Modello 02-7FG35
Carrelli Elevatori Termici 3.5-5.0 t 7FG/7FD www.toyota-forklifts.it Carrelli Elevatori Termici 3.5 t Caratteristiche tecniche principali 02-7FG35 42-7FD35 1.1 Costruttore Toyota Toyota 1.2 Modello 02-7FG35
Dome motorizzate Serie ZC-PT212P/XT. intenda fare. Potrete selezionare il modello più adatto potendo disporre delle seguenti funzionalità:
 Dome motorizzate 12x Dome motorizzate Serie ZC-PT212P/XT 04/02/2015- G228/3/I Dome motorizzate Caratteristiche principali La serie ZC- P T c o m p r e n d e d i v e r s i m o d e l l i d a l l e d i f
Dome motorizzate 12x Dome motorizzate Serie ZC-PT212P/XT 04/02/2015- G228/3/I Dome motorizzate Caratteristiche principali La serie ZC- P T c o m p r e n d e d i v e r s i m o d e l l i d a l l e d i f
Principali Attività di Ricerca in ambito UAV/RPAS
 Università degli Studi di Napoli Parthenope Seminari Interdisciplinari di Cultura Aeronautica II Ciclo - 3 Incontro Innovazione e Ricerca aerospaziale: i Velivoli a Pilotaggio Remoto Principali Attività
Università degli Studi di Napoli Parthenope Seminari Interdisciplinari di Cultura Aeronautica II Ciclo - 3 Incontro Innovazione e Ricerca aerospaziale: i Velivoli a Pilotaggio Remoto Principali Attività
Utilizzazione superficiale
 Utilizzazione superficiale Si definisce modulo unitario il più piccolo elemento che, replicato, consente di ottenere l intera area di stoccaggio del magazzino. Per ciascuno dei tipi di magazzino visti
Utilizzazione superficiale Si definisce modulo unitario il più piccolo elemento che, replicato, consente di ottenere l intera area di stoccaggio del magazzino. Per ciascuno dei tipi di magazzino visti
RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO
 Corsi di Laurea in: - Gestione tecnica del territorio agroforestale e Sviluppo rurale - Scienze forestali e ambientali - Costruzioni rurali e Topografia RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO 5. Fotogrammetria
Corsi di Laurea in: - Gestione tecnica del territorio agroforestale e Sviluppo rurale - Scienze forestali e ambientali - Costruzioni rurali e Topografia RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO 5. Fotogrammetria
NUOVI ORIZZONTI NUOVE PROFESSIONI CORSO DI FORMAZIONE
 NUOVI ORIZZONTI NUOVE PROFESSIONI CORSO DI FORMAZIONE Operatori di Sistemi Aeromobili a Pilotaggio Remoto SAPR per applicazioni di aerofotografia, aerofotogrammetria e telerilevamento Corso base di gestione
NUOVI ORIZZONTI NUOVE PROFESSIONI CORSO DI FORMAZIONE Operatori di Sistemi Aeromobili a Pilotaggio Remoto SAPR per applicazioni di aerofotografia, aerofotogrammetria e telerilevamento Corso base di gestione
TUTORIAL LA PROFONDITA DI CAMPO (DEPTH OF FIELD)
") TUTORIAL LA PROFONDITA DI CAMPO (DEPTH OF FIELD) La profondità di campo si riferisce alla gamma di distanza che appare accettabile nitida. Essa dipende essenzialmente dal tipo di fotocamera, dall'apertura
TUTORIAL LA PROFONDITA DI CAMPO (DEPTH OF FIELD) La profondità di campo si riferisce alla gamma di distanza che appare accettabile nitida. Essa dipende essenzialmente dal tipo di fotocamera, dall'apertura
Piano Lauree Scientifiche 2011-2012
 Piano Lauree Scientifiche 2011-2012 «non si può intendere se prima non s impara a intender lingua, e conoscer i caratteri, nei quali è scritto. Egli è scritto in lingua matematica, e i caratteri sono triangoli,
Piano Lauree Scientifiche 2011-2012 «non si può intendere se prima non s impara a intender lingua, e conoscer i caratteri, nei quali è scritto. Egli è scritto in lingua matematica, e i caratteri sono triangoli,
Tecnica image-based mirata ad una ricostruzione 3D accurata e affidabile
 FOTOGRAMMETRIA GEOMATICS FOR CONSERVATION & COMMUNICATION OF CULTURAL HERITAGE LABORATORY Tecnica di rilevamento che consente di ottenere informazioni metriche (forma e posizione) di oggetti tridimensionali
FOTOGRAMMETRIA GEOMATICS FOR CONSERVATION & COMMUNICATION OF CULTURAL HERITAGE LABORATORY Tecnica di rilevamento che consente di ottenere informazioni metriche (forma e posizione) di oggetti tridimensionali
ALMA MATER STUDIORUM - UNIVERSITÀ DI BOLOGNA
 ALMA MATER STUDIORUM - UNIVERSITÀ DI BOLOGNA SCUOLA DI INGEGNERIA E ARCHITETTURA DIPARTIMENTO DI INGEGNERIA CIVILE, CHIMICA, AMBIENTALE E DEI MATERIALI CORSO DI LAUREA IN INGEGNERIA CIVILE TESI DI LAUREA
ALMA MATER STUDIORUM - UNIVERSITÀ DI BOLOGNA SCUOLA DI INGEGNERIA E ARCHITETTURA DIPARTIMENTO DI INGEGNERIA CIVILE, CHIMICA, AMBIENTALE E DEI MATERIALI CORSO DI LAUREA IN INGEGNERIA CIVILE TESI DI LAUREA
Alessia NOBILE. Geomatica per la Conservazione e la Comunicazione dei Beni Culturali. Università degli Studi di Firenze
 IMMAGINI PANORAMICHE E TIPI DI PROIEZIONE Alessia NOBILE Geomatica per la Conservazione e la Comunicazione dei Beni Culturali Università degli Studi di Firenze Corso di perfezionamento in Geomatica per
IMMAGINI PANORAMICHE E TIPI DI PROIEZIONE Alessia NOBILE Geomatica per la Conservazione e la Comunicazione dei Beni Culturali Università degli Studi di Firenze Corso di perfezionamento in Geomatica per
Gestione e filtraggio di dati LiDAR in GRASS
 Gestione e filtraggio di dati LiDAR in GRASS Cos è il LiDAR? Light Detection And Ranging Tecnica di telerilevamento sistema basato sulla misura della distanza A bordo A terra Componenti laser scanner:
Gestione e filtraggio di dati LiDAR in GRASS Cos è il LiDAR? Light Detection And Ranging Tecnica di telerilevamento sistema basato sulla misura della distanza A bordo A terra Componenti laser scanner:
UNIVERSITA DEGLI STUDI MEDITERRANEA DI REGGIO CALABRIA FACOLTA DI INGEGNERIA LAUREA MAGISTRALE INGEGNERIA CIVILE
 UNIVERSITA DEGLI STUDI MEDITERRANEA DI REGGIO CALABRIA FACOLTA DI INGEGNERIA LAUREA MAGISTRALE INGEGNERIA CIVILE CORSO DI INFRASTRUTTURE AEROPORTUALI ED ELIPORTUALI LECTURE 06 CARATTERISTICHE FISICHE DELLE
UNIVERSITA DEGLI STUDI MEDITERRANEA DI REGGIO CALABRIA FACOLTA DI INGEGNERIA LAUREA MAGISTRALE INGEGNERIA CIVILE CORSO DI INFRASTRUTTURE AEROPORTUALI ED ELIPORTUALI LECTURE 06 CARATTERISTICHE FISICHE DELLE
Esempio prova di esonero Fisica Generale I C.d.L. ed.u. Informatica
 Esempio prova di esonero Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. Se il caffè costa 4000 /kg (lire al chilogrammo), quanto costa all incirca alla libbra? (a) 1800 ; (b) 8700 ; (c) 18000
Esempio prova di esonero Fisica Generale I C.d.L. ed.u. Informatica Nome: N.M.: 1. Se il caffè costa 4000 /kg (lire al chilogrammo), quanto costa all incirca alla libbra? (a) 1800 ; (b) 8700 ; (c) 18000
Laboratorio per il corso Scienza dei Materiali II
 UNIVERSITÀ DI CAMERINO Corso di Laurea Triennale in Fisica Indirizzo Tecnologie per l Innovazione Laboratorio per il corso Scienza dei Materiali II a.a. 2009-2010 Docente: E-mail: Euro Sampaolesi eurosampaoesi@alice.it
UNIVERSITÀ DI CAMERINO Corso di Laurea Triennale in Fisica Indirizzo Tecnologie per l Innovazione Laboratorio per il corso Scienza dei Materiali II a.a. 2009-2010 Docente: E-mail: Euro Sampaolesi eurosampaoesi@alice.it
Corso di Fotografia seconda lezione. Docente: Gianluca Bocci
 Corso di Fotografia seconda lezione Docente: Gianluca Bocci Elementi costitutivi di una fotografia: Soggetto Inquadratura Momento Esposizione Messa a fuoco 2 Soggetto: determina il genere ed in un certo
Corso di Fotografia seconda lezione Docente: Gianluca Bocci Elementi costitutivi di una fotografia: Soggetto Inquadratura Momento Esposizione Messa a fuoco 2 Soggetto: determina il genere ed in un certo
Sistema antintrusione Vimar
 24 V 1 2 3 12 V 12 V 230 V 10 12 16887 PRI 230 V 50 Hz SEC 12-12 - 24 V 18-18 - 24 VA ta 25 C IP40 F Microfono SISTEMA ANTINTRUSIONE 32 Idea Sistema antintrusione Vimar Prodotti al microscopio di Francesco
24 V 1 2 3 12 V 12 V 230 V 10 12 16887 PRI 230 V 50 Hz SEC 12-12 - 24 V 18-18 - 24 VA ta 25 C IP40 F Microfono SISTEMA ANTINTRUSIONE 32 Idea Sistema antintrusione Vimar Prodotti al microscopio di Francesco
ESPERIENZE CON GLI SPECCHI PIANI
 1. Qual è la posizione dell immagine fornita da uno specchio piano? Di che tipo di immagine si tratta? Disponi il cilindro giallo dietro lo specchio, in modo che coincida con l immagine riflessa del cilindro
1. Qual è la posizione dell immagine fornita da uno specchio piano? Di che tipo di immagine si tratta? Disponi il cilindro giallo dietro lo specchio, in modo che coincida con l immagine riflessa del cilindro
www.toyota-forklifts.it Carrelli Elevatori Termici 1.5-3.5 t
 www.toyota-forklifts.it Carrelli Elevatori Termici 1.5-3.5 t Carrelli Elevatori Termici 1.5-1.75 t Caratteristiche tecniche principali 02-8FGF15 02-8FDF15 02-8FGF18 02-8FDF18 1.1 Costruttore TOYOTA TOYOTA
www.toyota-forklifts.it Carrelli Elevatori Termici 1.5-3.5 t Carrelli Elevatori Termici 1.5-1.75 t Caratteristiche tecniche principali 02-8FGF15 02-8FDF15 02-8FGF18 02-8FDF18 1.1 Costruttore TOYOTA TOYOTA
DALLE CARTE ALLE SEZIONI GEOLOGICHE
 DALLE CARTE ALLE SEZIONI GEOLOGICHE PROFILO TOPOGRAFICO Il profilo topografico, detto anche profilo altimetrico, è l intersezione di un piano verticale con la superficie topografica. Si tratta quindi di
DALLE CARTE ALLE SEZIONI GEOLOGICHE PROFILO TOPOGRAFICO Il profilo topografico, detto anche profilo altimetrico, è l intersezione di un piano verticale con la superficie topografica. Si tratta quindi di
Former Fab progetta e realizza tubi formatori, anche conosciuti come colletti formatori, dispositivi pieghevoli, o formatori.
 www.landopack.com info@landopack.com tel +39 0424 54 90 97 mob +39 334 94 86 028 Former Fab progetta e realizza tubi formatori, anche conosciuti come colletti formatori, dispositivi pieghevoli, o formatori.
www.landopack.com info@landopack.com tel +39 0424 54 90 97 mob +39 334 94 86 028 Former Fab progetta e realizza tubi formatori, anche conosciuti come colletti formatori, dispositivi pieghevoli, o formatori.
INTELLIGENT AUTONOMOUS VEHICLES
 INTELLIGENT AUTONOMOUS VEHICLES X6 - DESCRIZIONE X6 Aibotix è un drone ultra-moderno semplice da pilotare grazie ad un alto grado di tecnologia robotica, un Unmanned Aerial Vehicle(UAV), unico nel suo
INTELLIGENT AUTONOMOUS VEHICLES X6 - DESCRIZIONE X6 Aibotix è un drone ultra-moderno semplice da pilotare grazie ad un alto grado di tecnologia robotica, un Unmanned Aerial Vehicle(UAV), unico nel suo
LINEE GUIDA PER IL POSIZIONAMENTO E L INSTALLAZIONE DELLE STAZIONI ANEMOMETRICHE DELLA RETE POWERED
 LINEE GUIDA PER IL POSIZIONAMENTO E L INSTALLAZIONE DELLE STAZIONI ANEMOMETRICHE DELLA RETE POWERED Prof. Renato Ricci Dipartimento di Energetica Università Politecnica delle Marche LA RETE DI RILEVAZIONE
LINEE GUIDA PER IL POSIZIONAMENTO E L INSTALLAZIONE DELLE STAZIONI ANEMOMETRICHE DELLA RETE POWERED Prof. Renato Ricci Dipartimento di Energetica Università Politecnica delle Marche LA RETE DI RILEVAZIONE
Dome motorizzate Serie ZC-PT236P/XT-II
 Dome motorizzate 36X Dome motorizzate Serie ZC-PT236P/XT-II 28/12/2012- G230/1/I Dome motorizzate Caratteristiche principali La serie ZC-PT comprende diversi modelli dalle differenti specifiche a seconda
Dome motorizzate 36X Dome motorizzate Serie ZC-PT236P/XT-II 28/12/2012- G230/1/I Dome motorizzate Caratteristiche principali La serie ZC-PT comprende diversi modelli dalle differenti specifiche a seconda
Piattaforme UAV/RPAS per il monitoraggio di infrastrutture energetiche. Antonio D Argenio Panoptes srl Palermo
 Piattaforme UAV/RPAS per il monitoraggio di infrastrutture energetiche Antonio D Argenio Panoptes srl Palermo the spatial way to small drones inspections Antonio D Argenio CEO Geologo, PhD UAV, GIS, management
Piattaforme UAV/RPAS per il monitoraggio di infrastrutture energetiche Antonio D Argenio Panoptes srl Palermo the spatial way to small drones inspections Antonio D Argenio CEO Geologo, PhD UAV, GIS, management
Lunghezza ocale. Donato Di Bello
 F Lunghezza ocale Donato Di Bello Cinepresa, telecamera, macchina fotografica: tre strumenti tecnologici che utilizziamo per registrare la realtà intorno a noi o per trasformare in immagini la nostra fantasia.
F Lunghezza ocale Donato Di Bello Cinepresa, telecamera, macchina fotografica: tre strumenti tecnologici che utilizziamo per registrare la realtà intorno a noi o per trasformare in immagini la nostra fantasia.
Le moderne tecniche di rilievo del soprassuolo
 CODEVINTEC Le moderne tecniche di rilievo del soprassuolo Il sistema recentemente messo a punto da NTR, Codevintec e Menci è un innovativo Sistema di Rilevamento Dinamico: un vero e proprio Laboratorio
CODEVINTEC Le moderne tecniche di rilievo del soprassuolo Il sistema recentemente messo a punto da NTR, Codevintec e Menci è un innovativo Sistema di Rilevamento Dinamico: un vero e proprio Laboratorio
Ministero delle Infrastrutture e dei Trasporti
 Ministero delle Infrastrutture e dei Trasporti PROVVEDITORATO INTERREGIONALE PER LE OPERE PUBBLICHE EMILIA ROMAGNA - MARCHE - SEDE COORDINATA DI ANCONA - UFFICIO 7 TECNICO OO.MM. CAPITOLATO TECNICO LOTTO
Ministero delle Infrastrutture e dei Trasporti PROVVEDITORATO INTERREGIONALE PER LE OPERE PUBBLICHE EMILIA ROMAGNA - MARCHE - SEDE COORDINATA DI ANCONA - UFFICIO 7 TECNICO OO.MM. CAPITOLATO TECNICO LOTTO
FAST SCANNING POINT AUTOFOCUS 3D LASER PROBE Sistema automatico di microscansione con Spot Laser 3D per misure dimensionali 3D non a contatto
 FAST SCANNING POINT AUTOFOCUS 3D LASER PROBE Sistema automatico di microscansione con Spot Laser 3D per misure dimensionali 3D non a contatto Microscopio con Testa Laser 3D / 5 Assi motorizzati Micro scansioni
FAST SCANNING POINT AUTOFOCUS 3D LASER PROBE Sistema automatico di microscansione con Spot Laser 3D per misure dimensionali 3D non a contatto Microscopio con Testa Laser 3D / 5 Assi motorizzati Micro scansioni
Esperimento sull ottica
 Esperimento sull ottica Gruppo: Valentina Sotgiu, Irene Sini, Giorgia Canetto, Federica Pitzalis, Federica Schirru, Jessica Atzeni, Martina Putzu, Veronica, Orgiu e Deborah Pilleri. Teoria di riferimento:
Esperimento sull ottica Gruppo: Valentina Sotgiu, Irene Sini, Giorgia Canetto, Federica Pitzalis, Federica Schirru, Jessica Atzeni, Martina Putzu, Veronica, Orgiu e Deborah Pilleri. Teoria di riferimento:
ISTITUTO TECNICO DEI TRASPORTI E LOGISTICA NAUTICO SAN GIORGIO. Programma di TECNOLOGIE E TECNICHE DI RAPPRESENTAZIONE GRAFICA a.s.
 ISTITUTO TECNICO DEI TRASPORTI E LOGISTICA NAUTICO SAN GIORGIO classe 1C Materiali, strumenti e convenzioni generali per il disegno tecnico con metodi tradizionali e computerizzati. Squadratura del foglio
ISTITUTO TECNICO DEI TRASPORTI E LOGISTICA NAUTICO SAN GIORGIO classe 1C Materiali, strumenti e convenzioni generali per il disegno tecnico con metodi tradizionali e computerizzati. Squadratura del foglio
Dome motorizzate Colore, Day&Night e WideDynamic
 Dome motorizzate Colore, Day&Night e WideDynamic Dome motorizzate Serie ZC-PTxxxP/XT 01/01/2010 - G082/8/I Dome motorizzate Caratteristiche principali La serie ZC-PT comprende diversi modelli dalle differenti
Dome motorizzate Colore, Day&Night e WideDynamic Dome motorizzate Serie ZC-PTxxxP/XT 01/01/2010 - G082/8/I Dome motorizzate Caratteristiche principali La serie ZC-PT comprende diversi modelli dalle differenti
Protocollo dei saperi imprescindibili Ordine di scuola: professionale
 Protocollo dei saperi imprescindibili Ordine di scuola: professionale DISCIPLINA: MATEMATICA RESPONSABILE: CAGNESCHI F. IMPERATORE D. CLASSE: prima servizi commerciali Utilizzare le tecniche e le procedure
Protocollo dei saperi imprescindibili Ordine di scuola: professionale DISCIPLINA: MATEMATICA RESPONSABILE: CAGNESCHI F. IMPERATORE D. CLASSE: prima servizi commerciali Utilizzare le tecniche e le procedure
CLASSE 48/C - REPARTI DI LAVORAZIONE PER LA RIPRESA CINEMATOGRAFICA E TELEVISIVA. Programma d'esame. Temi d'esame proposti in precedenti concorsi
 CLASSE 48/C - REPARTI DI LAVORAZIONE PER LA RIPRESA Programma d'esame CLASSE 48/C - REPARTI DI LAVORAZIONE PER LA RIPRESA Temi d'esame proposti in precedenti concorsi CLASSE 48/C - REPARTI DI LAVORAZIONE
CLASSE 48/C - REPARTI DI LAVORAZIONE PER LA RIPRESA Programma d'esame CLASSE 48/C - REPARTI DI LAVORAZIONE PER LA RIPRESA Temi d'esame proposti in precedenti concorsi CLASSE 48/C - REPARTI DI LAVORAZIONE
Università degli Studi di Verona Corsi di Laurea in Matematica Applicata, Informatica e Informatica Multimediale. Test di autovalutazione (matematica)
") Università degli Studi di Verona Corsi di Laurea in Matematica Applicata, Informatica e Informatica Multimediale Test di autovalutazione (matematica) 1. Eseguendo la divisione con resto di 3437 per 225
Università degli Studi di Verona Corsi di Laurea in Matematica Applicata, Informatica e Informatica Multimediale Test di autovalutazione (matematica) 1. Eseguendo la divisione con resto di 3437 per 225
Esempi di esercizi di Impianti e sistemi di sicurezza
 Esempi di esercizi di Impianti e sistemi di sicurezza Primo Esonero Esercizi su Impianti Antintrusione Informazioni generali: Schema del circuito elettrico che collega l alimentatore al sensore: dove è
Esempi di esercizi di Impianti e sistemi di sicurezza Primo Esonero Esercizi su Impianti Antintrusione Informazioni generali: Schema del circuito elettrico che collega l alimentatore al sensore: dove è
Temperatura. Termometri a termocoppia. Termometri per termocoppia e Sonde Pt100, Pt1000. TC-1
 Temperatura Termometri a termocoppia Termometri per termocoppia e Sonde Pt100, Pt1000. TC-1 HD 2108.1 - HD 2108.2 HD 2128.1 - HD 2128.2 TC-2 TERMOMETRI A TERMOCOPPIA: K, J, T, N, R, S, B, E Termometri
Temperatura Termometri a termocoppia Termometri per termocoppia e Sonde Pt100, Pt1000. TC-1 HD 2108.1 - HD 2108.2 HD 2128.1 - HD 2128.2 TC-2 TERMOMETRI A TERMOCOPPIA: K, J, T, N, R, S, B, E Termometri
la restituzione prospettica da singolo fotogramma
 la restituzione prospettica da singolo fotogramma arch. francesco guerini francesco.guerini@gmail.com politecnico di Milano, Facoltà di Architettura e Società Laboratorio di Rappresentazione 1 Prof. Andrea
la restituzione prospettica da singolo fotogramma arch. francesco guerini francesco.guerini@gmail.com politecnico di Milano, Facoltà di Architettura e Società Laboratorio di Rappresentazione 1 Prof. Andrea
Speed-dome CSD600CAM. Caratteristiche Principali CSD600CAM-27 CSD600CAM-37
 Speed-dome CSD600CAM CSD600CAM-27X CSD600CAM-37X Speed Dome ad alta velocità con moduli da 27X e 37X La CSD600CAM è il nuovo modulo di telecamera speed-dome sviluppato da Fracarro che fornisce le migliori
Speed-dome CSD600CAM CSD600CAM-27X CSD600CAM-37X Speed Dome ad alta velocità con moduli da 27X e 37X La CSD600CAM è il nuovo modulo di telecamera speed-dome sviluppato da Fracarro che fornisce le migliori
INDICE. INTRODUZIONE...2 1 Scelta dell ottica...4. 2 Altezza della telecamera...5. 3 Distanza laterale della telecamera dal centro targa...
 INDICE INTRODUZIONE...2 1 Scelta dell ottica...4 2 Altezza della telecamera...5 3 Distanza laterale della telecamera dal centro targa...6 4 Puntamento dell illuminatore IR...7 5 Installazione...8 6 Parametri
INDICE INTRODUZIONE...2 1 Scelta dell ottica...4 2 Altezza della telecamera...5 3 Distanza laterale della telecamera dal centro targa...6 4 Puntamento dell illuminatore IR...7 5 Installazione...8 6 Parametri
Orientamento e restituzione
 UNITÀ T3 Orientamento e restituzione TEORI 1 Orientamento dei fotogrammi 2 Orientamento interno 3 Orientamento esterno 4 Orientamento relativo 5 Orientamento assoluto 6 Triangolazione aerea 7 Equazioni
UNITÀ T3 Orientamento e restituzione TEORI 1 Orientamento dei fotogrammi 2 Orientamento interno 3 Orientamento esterno 4 Orientamento relativo 5 Orientamento assoluto 6 Triangolazione aerea 7 Equazioni
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
Nuovi Obiettivi Asferici TVCC 2004
 Nuovi Obiettivi Asferici TVCC 2004 Tecnologia delle Lenti Asferiche Quando la luce bianca, composta da una miscela di colori, entra in una lente, l indice di rifrazione visto dalle singole componenti cromatiche
Nuovi Obiettivi Asferici TVCC 2004 Tecnologia delle Lenti Asferiche Quando la luce bianca, composta da una miscela di colori, entra in una lente, l indice di rifrazione visto dalle singole componenti cromatiche
HD 2328.0 HD2328.0 TERMOMETRO A TERMOCOPPIA A DUE INGRESSI TP-14. Misura di temperatura dello strumento. Accuratezza strumento
 HD 2328.0 Misura di temperatura dello strumento Risoluzione 0.1 C Accuratezza strumento L accuratezza si riferisce al solo strumento; non è compreso l errore dovuto alla termocoppia e al sensore di riferimento
HD 2328.0 Misura di temperatura dello strumento Risoluzione 0.1 C Accuratezza strumento L accuratezza si riferisce al solo strumento; non è compreso l errore dovuto alla termocoppia e al sensore di riferimento
BRC-Z330. Telecamera robotica SD/HD con sensore CMOS da 1/3" Presentazione
 BRC-Z330 Telecamera robotica SD/HD con sensore CMOS da 1/3" Presentazione La BRC-Z330 è stata progettata per soddisfare la crescente richiesta di immagini Full HD da telecamere robotiche. È dotata di un
BRC-Z330 Telecamera robotica SD/HD con sensore CMOS da 1/3" Presentazione La BRC-Z330 è stata progettata per soddisfare la crescente richiesta di immagini Full HD da telecamere robotiche. È dotata di un
Esercizi sulla conversione tra unità di misura
 Esercizi sulla conversione tra unità di misura Autore: Enrico Campanelli Prima stesura: Settembre 2013 Ultima revisione: Settembre 2013 Per segnalare errori o per osservazioni e suggerimenti di qualsiasi
Esercizi sulla conversione tra unità di misura Autore: Enrico Campanelli Prima stesura: Settembre 2013 Ultima revisione: Settembre 2013 Per segnalare errori o per osservazioni e suggerimenti di qualsiasi
RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO
 Corsi di Laurea in: - Gestione tecnica del territorio agroforestale e Sviluppo rurale - Scienze forestali e ambientali - Costruzioni rurali e Topografia RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO 4. Il
Corsi di Laurea in: - Gestione tecnica del territorio agroforestale e Sviluppo rurale - Scienze forestali e ambientali - Costruzioni rurali e Topografia RILIEVO E RAPPRESENTAZIONE DEL TERRITORIO 4. Il
Convenzioni di rappresentazione
 Convenzioni di rappresentazione Ogni elemento grafico su un elaborato deve avere un preciso ed inequivocabile significato, secondo le convenzioni di seguito illustrate. In particolare: Disegno tecnico:
Convenzioni di rappresentazione Ogni elemento grafico su un elaborato deve avere un preciso ed inequivocabile significato, secondo le convenzioni di seguito illustrate. In particolare: Disegno tecnico: