Un altra cosa da ricordare:
|
|
|
- Maria Bucci
- 5 anni fa
- Visualizzazioni
Transcript
1 Un altra cosa da ricordare: Esistono svariati tentativi di autolocalizzare un robot misurando l intensità del segnale proveniente da diverse celle di WLAN. 2 Finora abbiamo parlato di autolocalizzazione Anche se il confine è sfumato Non esiste scambio di energia fra robot e punti cospicui (landmark) Ma allora i transponder? Diciamo meglio: l elaborazione può essere interamente fatta a bordo del robot Altrimenti parliamo di localizzazione Il progetto AMIRoLoS (Active Marker Internet-based Robot Localization System Il robot (o i robot) viene localizzato, non si autolocalizza 3 1
2 AMIRoLoS: evoluzione storica Il principio: 4 Se il marker si muove su un piano, e Se la telecamera è fuori da quel piano Esiste una corrispondenza biunivoca fra la posizione del marker e la sua proiezione sul piano della telecamera Tsai et al. Hanno sviluppato un metodo che permette di costruire il modello della telecamera basandosi su una serie di osservazioni 5 2
3 La prima realizzazione pratica: 6 Il secondo passo: migliorare il marker Come distinguere il marker dal resto dell ambiente? Colore Funziona solo con illuminazione controllata Luminosità Funziona solo in ambienti interni Variabilità nel tempo E più difficle da realizzare 7 3
4 L idea base di Amirolos La telecamera acquisisce una serie di immagini, integrando la luce in certi istanti e non in altri, a frequenza costante Il marker emette luce modulata con un onda rettangolare, di frequenza e duty cycle opportuni 8 Prove sul marker 9 4
 Finora, abbiamo considerato i landmark come se fossero puntiformi, e abbiamo misurato: Distanze da punti Direzioni di punti Però il concetto può essere esteso in due direzioni: Landmark che non")
5 Risultato finale: 10 Un estensione del concetto di landmark Finora, abbiamo considerato landmark che usano particolari tipi di energia (lampade, laser, radio, ecc.) Finora, abbiamo considerato i landmark come se fossero puntiformi, e abbiamo misurato: Distanze da punti Direzioni di punti Però il concetto può essere esteso in due direzioni: Landmark che non emettono particolari tipi di energia Landmark dotati di dimensioni non nulle 11 5

6 Un sistema di preelaborazione ottica Semplificare l immagine per diminuire i calcoli 12 Ma i landmark dove sono? Il landmark qui è costituito da un insieme di caratteristiche dell ambiente, che è univoco per ogni posizione all interno dell ambiente stesso. 13 6



7 Le fasi dell elaborazione (in bianco e nero) 14 Come si usa questo sistema: In un ambiente noto si memorizzano viste prese in diverse posizioni Tramite un opportuno algoritmo si confronta la vista attuale con quelle memorizzate, per trovare la migliore corrispondenza. 15 7
8 Altro uso dei coni: progetto Pollicino Confronto effettuato con Reti neurali Metodi statistici Importante l uso dell informazione colore 16 Nota importante: Il fatto di acquisire informazioni in ogni direzione minimizza l effetto di piccole alterazioni (occlusioni, ecc.) 17 8


9 Uso dei coni: il progetto CLF Ancora dal mondo delle api, quando volano in spazi ristretti 18 Il principio del CLF: L ape cerca di equalizzare il flusso ottico a sinistra e a destra Possiamo fare la stessa cosa usando uno dei nostri specchi conici: 19 9


10 Un immagine reale a colori: Un implementazione effettiva: 10

11 Ricerca automatica di landmark naturali 22 Un altro sistema: la trasformata affine 23 11
12 Un accoppiamento mal fatto 24 Un accoppiamento migliore (Trasformata di Fourier-Mellin) 25 12
13 I risultati che si ottengono 26 Si determinano dei campi di potenziale È interessante notare che anche in presenza di errori in generale si arriva ad un buon risultato! 27 13
14 La visione per l autolocalizzazione In generale: individuare dei landmark ed effettuare operazioni di triangolazione I landmark possono essere: Artificiali Naturali I metodi sono: Riconoscimento di landmark Riconoscimento di scene note Riconoscimento tramite pre-elaborazione 28 Un altro luogo di punti: l allineamento Due beacon, visti sovrapposti 29 14
15 Riconoscimento di landmark artificiali 30 Landmark scelti con attenzione: Landmark verticali, asse del sistema di visone orizzontale: Dimensione verticale indica distanza 31 15
16 Landmark scelti con attenzione: Rapporto orizzontale-verticale indica disassamento 32 Landmark doppi danno più informazione 33 16


17 Anche altre forme: 34 Landmark naturali: ispirati dalla biologia Le api sono animali semplici, eppure funzionano meglio dei robot Hanno occhi strani E modi di fare anche più strani 35 17




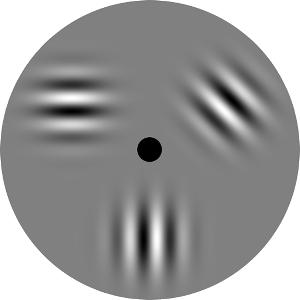



18 Gli occhi composti delle api: 36 Cosa vede un ape? Si può provare con una simulazione 37 18
19 Il TBL Quando un ape si allontana dal punto in cui ha trovato il nettare o dall alveare, vola all indietro descrivendo semicerchi (Turn Back and Look) Sembra che fotografi l ambiente per poter poi confrontare le immagini prese con quelle che vedrà la prossima volta Come avvenga questo confronto, non è ancora stato chiarito. 38 La messa a fuoco automatica Metodi telemetrici Metodi passivi basati sui gradienti Metodi attivi a luce strutturata 39 19
20 Il principio del telemetro 40 Nella robotica industriale: Visione bidimensionale (monoscopica) Acquisizione (spesso in b/n) Filtraggio Binarizzazione Segmentazione (analisi di connettività) Estrazione di caratteristiche Riconoscimento e misura Visione semplificata Luce strutturata 41 20
21 Cosa serve la visione? Nella robotica industriale: Riconoscimento di pezzi (noti) e/o della loro posizione Riconoscimento di particolari (es.: cianfrino di saldatura) Controllo di qualità Nella robotica autonoma: Riconoscimento di oggetti noti Comprensione di oggetti incogniti Riconoscimento di ostacoli (fissi e in movimento) Riconoscimento di landmark Ausilio alla navigazione Self localization and mapping (SLAM) 42 Il recupero della terza dimensione Oltre ai range scanner, esistono sistemi: Basati su immagini 2D (puro): Shape from shading Shape from contour Shape from focus Basati su immagini 2D (con trucchi ) Dimensione apparente degli oggetti Triangolazioni Basati su visione stereoscopica (binoculare, trinoculare, ) Misti Speciali 43 21

22 Shape from shading 44 Ma attenzione: Se il colore dell oggetto non è uniforme, il metodo non può funzionare E neanche se l illuminazione non è opportuna E potrebbe comunque essere ambiguo: 45 22
23 Shape from contour 46 Fortissime ambiguità: 47 23


24 E addirittura: 48 Shape from focus Mettere a fuoco equivale a massimizzare il modulo del gradiente del segnale video nella zona dell immagine che interessa 49 24
25 Metodi attivi Proiettano griglie di luce strutturata, ed usano poi metodi simili a quelli già visti
Un estensione del concetto di landmark
 Un estensione del concetto di landmark Finora, abbiamo considerato landmark che usano particolari tipi di energia (lampade, laser, radio, ecc.) Finora, abbiamo considerato i landmark come se fossero puntiformi,
Un estensione del concetto di landmark Finora, abbiamo considerato landmark che usano particolari tipi di energia (lampade, laser, radio, ecc.) Finora, abbiamo considerato i landmark come se fossero puntiformi,
Lezione 28 Ancora localizzazione 19 maggio
 Robotica Robot Industriali e di Servizio Lezione 28: Ancora localizzazione Un estensione del concetto di landmark Finora, abbiamo considerato landmark che usano particolari tipi di energia (lampade, laser,
Robotica Robot Industriali e di Servizio Lezione 28: Ancora localizzazione Un estensione del concetto di landmark Finora, abbiamo considerato landmark che usano particolari tipi di energia (lampade, laser,
Lezione 11: La visione robotica 2
 Robotica Mobile Lezione 11: La visione robotica 2 Applicazioni sofisticate per problemi difficili Nella robotica industriale: Visione bidimensionale (monoscopica) Acquisizione (spesso in b/n) Filtraggio
Robotica Mobile Lezione 11: La visione robotica 2 Applicazioni sofisticate per problemi difficili Nella robotica industriale: Visione bidimensionale (monoscopica) Acquisizione (spesso in b/n) Filtraggio
Giornata ANIPLA presso il SAVE. Sistemi di Visione Artificiale nei Processi Industriali. 24 ottobre 2012
 Giornata ANIPLA presso il SAVE Sistemi di Visione Artificiale nei Processi Industriali 24 ottobre 2012 Guida robot 3D... Un sistema di guida robot 3D determina posizioni e pose, a priori incognite, di
Giornata ANIPLA presso il SAVE Sistemi di Visione Artificiale nei Processi Industriali 24 ottobre 2012 Guida robot 3D... Un sistema di guida robot 3D determina posizioni e pose, a priori incognite, di
Robotica Mobile Percezione
 Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Sensori 3D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Sensori 3D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Map representations Point cloud Elevation map Multi-level Surface map Octree (occupancy grid) 2 from Wurm et al., OctoMap:
Sensori 3D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Map representations Point cloud Elevation map Multi-level Surface map Octree (occupancy grid) 2 from Wurm et al., OctoMap:
Lezione 22 Il problema della localizzazione 5 maggio
 Robotica Robot Industriali e di Servizio Lezione 22: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Robotica Robot Industriali e di Servizio Lezione 22: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Lezione 3: Il problema della localizzazione
 Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Evento organizzato da. i Basilio Bona
 Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Evento organizzato da Il progetto MACP4Log Finalità, risultati ti e ricadute industriali i Basilio Bona Robotics Research Group DAUIN Politecnico di Torino 1 I fatti MACP4Log (Mobile Autonomous and Cooperating
Fotogrammetria digitale: sistemi multi-immagine e "fotomodellazione"
 Università IUAV di Venezia Laboratorio di Fotogrammetria Elena Fratus de Balestrini Fotogrammetria digitale: sistemi multi-immagine e "fotomodellazione" RILIEVO E FOTOGRAMMETRIA > RILIEVO: strumento fondamentale
Università IUAV di Venezia Laboratorio di Fotogrammetria Elena Fratus de Balestrini Fotogrammetria digitale: sistemi multi-immagine e "fotomodellazione" RILIEVO E FOTOGRAMMETRIA > RILIEVO: strumento fondamentale
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Lezione 11: Ancóra visione
 Robotica Robot Industriali e di Servizio Lezione 11: Ancóra visione Esperimenti pratici Un algoritmo pratico /* performs connectivity analysis in a recursive way. */ void vlfindblob (vlimage* pic, int
Robotica Robot Industriali e di Servizio Lezione 11: Ancóra visione Esperimenti pratici Un algoritmo pratico /* performs connectivity analysis in a recursive way. */ void vlfindblob (vlimage* pic, int
Sistema di Elaborazione. Sistema di Controllo. Figura 1
 DIDAROBOT. Introduzione Un qualunque Robot contiene al suo interno tutti gli elementi che vengono normalmente studiati in un corso di studi in Elettronica e questo lo rende uno strumento didattico ideale.
DIDAROBOT. Introduzione Un qualunque Robot contiene al suo interno tutti gli elementi che vengono normalmente studiati in un corso di studi in Elettronica e questo lo rende uno strumento didattico ideale.
DOCUMENTAZIONE. La documentazione canonica è bidimensionale: gli archeologi sono sempre stati educati a RIDURRE la realtà. Convenzioni grafiche
 DOCUMENTAZIONE La documentazione canonica è bidimensionale: gli archeologi sono sempre stati educati a RIDURRE la realtà Convenzioni grafiche 3D: approccio diretto, non viziato da interpretazione personale
DOCUMENTAZIONE La documentazione canonica è bidimensionale: gli archeologi sono sempre stati educati a RIDURRE la realtà Convenzioni grafiche 3D: approccio diretto, non viziato da interpretazione personale
LA VISIONE. il controllo dell ambiente l occhio i colori persistenza dell immagine visione tridimensionale ERGONOMIA LA VISIONE
 LA VISIONE il controllo dell ambiente l occhio i colori persistenza dell immagine visione tridimensionale ergonomia L. Bandini Buti Diapo-Ex-8-La visione 1 L OCCHIO Angolo naturale della visione (-15 sull
LA VISIONE il controllo dell ambiente l occhio i colori persistenza dell immagine visione tridimensionale ergonomia L. Bandini Buti Diapo-Ex-8-La visione 1 L OCCHIO Angolo naturale della visione (-15 sull
Immagini binarie. Binarizzazione di immagini a livelli di grigio
 Immagini binarie Binarizzazione di immagini a livelli di grigio Immagini binarie In molti casi gli le scene di interesse conducono ad immagini che possono essere considerate binarie, cioè contenenti nel
Immagini binarie Binarizzazione di immagini a livelli di grigio Immagini binarie In molti casi gli le scene di interesse conducono ad immagini che possono essere considerate binarie, cioè contenenti nel
Lezione 3: Dalla simulazione alla realtà
 Robotica Mobile Lezione 3: Dalla simulazione alla realtà C è un problema: Qualcosa non funziona nel simulatore MobileSim I comandi di movimento diretto non vengono sempre eseguiti correttamente Chi scopre
Robotica Mobile Lezione 3: Dalla simulazione alla realtà C è un problema: Qualcosa non funziona nel simulatore MobileSim I comandi di movimento diretto non vengono sempre eseguiti correttamente Chi scopre
Le immagini digitali. Introduzione
 Le immagini digitali Introduzione 2 L informazione grafica grafica a caratteri grafica vettoriale grafica raster 3 Due grandi categorie Immagini reali: acquisite da una scena reale mediante telecamera,
Le immagini digitali Introduzione 2 L informazione grafica grafica a caratteri grafica vettoriale grafica raster 3 Due grandi categorie Immagini reali: acquisite da una scena reale mediante telecamera,
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
Grafica ed interfacce per la comunicazione Scienze della Comunicazione
 Grafica ed interfacce per la comunicazione Scienze della Comunicazione Paola Vocca Lezione 13: Conoscere l utente: visione Lucidi tradotti e adattati da materiale presente su http://www.hcibook.com/e3/resources/
Grafica ed interfacce per la comunicazione Scienze della Comunicazione Paola Vocca Lezione 13: Conoscere l utente: visione Lucidi tradotti e adattati da materiale presente su http://www.hcibook.com/e3/resources/
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Structure From Motion Date m immagini di n punti 3D (fissi) Stimare le m matrici di proiezione P i e gli n vettori X j date le mn corrispondenze x ij SFM
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Structure From Motion Date m immagini di n punti 3D (fissi) Stimare le m matrici di proiezione P i e gli n vettori X j date le mn corrispondenze x ij SFM
D2.4 SISTEMA DI VISIONE E CALIBRAZIONE CELLA
 MM&A Micro Manipulation and Assembly D2.4 SISTEMA DI VISIONE E CALIBRAZIONE CELLA Gruppo ITIA Documento interno MM&A-PRIN2009-0003 Progetto PRIN2009 Coordinatore scientifico Prof. Giovanni Legnani Serena
MM&A Micro Manipulation and Assembly D2.4 SISTEMA DI VISIONE E CALIBRAZIONE CELLA Gruppo ITIA Documento interno MM&A-PRIN2009-0003 Progetto PRIN2009 Coordinatore scientifico Prof. Giovanni Legnani Serena
Lezione 22 - Ottica geometrica
 Lezione 22 - Ottica geometrica E possibile, in certe condizioni particolari, prescindere dal carattere ondulatorio della radiazione luminosa e descrivere la propagazione della luce usando linee rette e
Lezione 22 - Ottica geometrica E possibile, in certe condizioni particolari, prescindere dal carattere ondulatorio della radiazione luminosa e descrivere la propagazione della luce usando linee rette e
S tereometria. Percezione della profondità. Stereometria. S time delle dis tanze
 Stereometria Percezione della profondità S tereometria S time delle dis tanze Percezione della profondità Prospettiva Ombreggiatura Quinte Lo sposalizio della Vergine Raffaello Sanzio Altezza sull orizzonte
Stereometria Percezione della profondità S tereometria S time delle dis tanze Percezione della profondità Prospettiva Ombreggiatura Quinte Lo sposalizio della Vergine Raffaello Sanzio Altezza sull orizzonte
Operazioni puntuali. Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma
 Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma Analisi di Basso Livello In ingresso abbiamo le immagini provenienti dai sensori. In uscita si hanno un insieme di matrici ognuna delle
Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma Analisi di Basso Livello In ingresso abbiamo le immagini provenienti dai sensori. In uscita si hanno un insieme di matrici ognuna delle
Smart Factory: l innovazione tecnologica per il rinascimento manifatturiero GRACE e myleaf: verso la quarta rivoluzione industriale
 Smart Factory: l innovazione tecnologica per il rinascimento manifatturiero GRACE e myleaf: verso la quarta rivoluzione industriale gruppo 360 collaboratori (2011) 44% laureati 32 anni - età media sedi
Smart Factory: l innovazione tecnologica per il rinascimento manifatturiero GRACE e myleaf: verso la quarta rivoluzione industriale gruppo 360 collaboratori (2011) 44% laureati 32 anni - età media sedi
Elaborazione delle immagini a basso livello
 Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Fiora Pirri. Lezione. Lunedi giovedi venerdi Fiora Pirri. Corso Visione e Percezione. Visione e Percezione 1
 Corso Introduzione, acquisizione e modello della camera Lezioni Lunedi giovedi venerdi 12.00-13.30 15.45-19.00 A3 A3 Lezione Lezione+ Lab 1 Sito, Orari, Ricevimento Il sito del corso è http://www.dis.uniroma1.it/~visiope
Corso Introduzione, acquisizione e modello della camera Lezioni Lunedi giovedi venerdi 12.00-13.30 15.45-19.00 A3 A3 Lezione Lezione+ Lab 1 Sito, Orari, Ricevimento Il sito del corso è http://www.dis.uniroma1.it/~visiope
STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS
 STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS CORSO DI STUDIO IN INGEGNERIA ELETTRONICA LAUREA MAGISTRALE IN BIOINGEGNERIA (LM21) CORSO DI BIOMECCANICA A.A. 2015/16
STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS CORSO DI STUDIO IN INGEGNERIA ELETTRONICA LAUREA MAGISTRALE IN BIOINGEGNERIA (LM21) CORSO DI BIOMECCANICA A.A. 2015/16
Sistemi di Elaborazione delle Informazioni
 SCUOLA DI MEDICINA E CHIRURGIA Università degli Studi di Napoli Federico II Corso di Sistemi di Elaborazione delle Informazioni Dott. Francesco Rossi a.a. 2016/2017 1 I linguaggi di programmazione e gli
SCUOLA DI MEDICINA E CHIRURGIA Università degli Studi di Napoli Federico II Corso di Sistemi di Elaborazione delle Informazioni Dott. Francesco Rossi a.a. 2016/2017 1 I linguaggi di programmazione e gli
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
ALGORITMO SPUTNIK 1. INTRODUZIONE
 ALGORITMO SPUTNIK 1. INTRODUZIONE Sputnik rappresenta l evoluzione del progetto COSMOS realizzato per l individuazione della traiettorie dei veicoli in un filmato generato da una comune videocamera. La
ALGORITMO SPUTNIK 1. INTRODUZIONE Sputnik rappresenta l evoluzione del progetto COSMOS realizzato per l individuazione della traiettorie dei veicoli in un filmato generato da una comune videocamera. La
Parabola ************************* La curva chiamata PARABOLA si rappresenta con la seguente funzione matematica (1)
") ttività di recupero conoscenze di ase) araola Oiettivi Saper riconoscere la funzione che esprime la conica. Saper tracciare il grafico di una paraola. Saper determinare gli elementi caratterizzanti una
ttività di recupero conoscenze di ase) araola Oiettivi Saper riconoscere la funzione che esprime la conica. Saper tracciare il grafico di una paraola. Saper determinare gli elementi caratterizzanti una
"Match analysis, GPS, potenza metabolica: le bugie della verità"
 www.k-sport.it "Match analysis, GPS, potenza metabolica: le bugie della verità" Mirko Marcolini Il carico esterno Cos è Ogni grandezza fisica viene definita mediante il metodo che si usa per misurarla.
www.k-sport.it "Match analysis, GPS, potenza metabolica: le bugie della verità" Mirko Marcolini Il carico esterno Cos è Ogni grandezza fisica viene definita mediante il metodo che si usa per misurarla.
In memoria di mio padre. A mia madre, a tutti gli amici. A tutti voi grazie.
 In memoria di mio padre. A mia madre, a tutti gli amici. A tutti voi grazie. Università di Pisa Corso di laurea in Ingegneria Aerospaziale TESI DI LAUREA SPECIALISTICA Sviluppo ed ottimizzazione delle
In memoria di mio padre. A mia madre, a tutti gli amici. A tutti voi grazie. Università di Pisa Corso di laurea in Ingegneria Aerospaziale TESI DI LAUREA SPECIALISTICA Sviluppo ed ottimizzazione delle
Il termine colore indica l interpretazione che il nostro cervello dà alla radiazione elettromagnetica emessa da un corpo. Si definisce luminosa
 Teoria dei Colori Il termine colore indica l interpretazione che il nostro cervello dà alla radiazione elettromagnetica emessa da un corpo. Si definisce luminosa quella parte di radiazione elettromagnetica
Teoria dei Colori Il termine colore indica l interpretazione che il nostro cervello dà alla radiazione elettromagnetica emessa da un corpo. Si definisce luminosa quella parte di radiazione elettromagnetica
Estrazione dei bordi
 Estrazione dei bordi L algoritmo di Marr-Hildreth L algoritmo di Canny Operatori per l estrazione dei bordi (edge operators) Lo scopo di questi operatori è quello di generare un immagine dei bordi (edge
Estrazione dei bordi L algoritmo di Marr-Hildreth L algoritmo di Canny Operatori per l estrazione dei bordi (edge operators) Lo scopo di questi operatori è quello di generare un immagine dei bordi (edge
Analisi di sequenze di immagini. Sequenze di immagini Il flusso ottico Corrispondenze discrete
 Analisi di sequenze di immagini Sequenze di immagini Il flusso ottico Corrispondenze discrete Stima del Movimento La stima del movimento introduce il tempo L'evoluzione temporale comporta un enorme incremento
Analisi di sequenze di immagini Sequenze di immagini Il flusso ottico Corrispondenze discrete Stima del Movimento La stima del movimento introduce il tempo L'evoluzione temporale comporta un enorme incremento
Macchine astratte, linguaggi, interpretazione, compilazione
 Macchine astratte, linguaggi, interpretazione, compilazione 1 Macchine astratte una collezione di strutture dati ed algoritmi in grado di memorizzare ed eseguire programmi componenti della macchina astratta
Macchine astratte, linguaggi, interpretazione, compilazione 1 Macchine astratte una collezione di strutture dati ed algoritmi in grado di memorizzare ed eseguire programmi componenti della macchina astratta
Programmazione con Java
 Programmazione con Java Realtà e sistemi informatici Scopo dell informatica Studiare e produrre tecnologie, tecniche e metodi per rappresentare il mondo reale mediante dati, informazioni e conoscenza che
Programmazione con Java Realtà e sistemi informatici Scopo dell informatica Studiare e produrre tecnologie, tecniche e metodi per rappresentare il mondo reale mediante dati, informazioni e conoscenza che
METODO DELLA FUNZIONE DESCRITTIVA
 METODO DELLA FUNZIONE DESCRITTIVA Obiettivo: Fornire condizioni per valutare esistenza entità stabilità di eventuali oscillazioni permanenti di un sistema di Lur e tempo invariante soggetto ad ingressi
METODO DELLA FUNZIONE DESCRITTIVA Obiettivo: Fornire condizioni per valutare esistenza entità stabilità di eventuali oscillazioni permanenti di un sistema di Lur e tempo invariante soggetto ad ingressi
Tecnologie per la visione 3D a confronto
 Tecnologie per la visione 3D a confronto Serena Monti, Product Manager Vision, SICK S.p.A. Smart Vision - Le tecnologie per l industria del futuro Compiti di un sistema di visione Tipicamente un sistema
Tecnologie per la visione 3D a confronto Serena Monti, Product Manager Vision, SICK S.p.A. Smart Vision - Le tecnologie per l industria del futuro Compiti di un sistema di visione Tipicamente un sistema
Studio e implementazione di un sistema di proiezione video in stereografia 3D
 ALMA MATER STUDIORUM -UNIVERSITA DI BOLOGNA SEDE DI CESENA FACOLTA DI SCIENZE MATEMATICHE, FISICHE E NATURALI CORSO DI LAUREA IN SCIENZE DELL'INFORMAZIONE Studio e implementazione di un sistema di proiezione
ALMA MATER STUDIORUM -UNIVERSITA DI BOLOGNA SEDE DI CESENA FACOLTA DI SCIENZE MATEMATICHE, FISICHE E NATURALI CORSO DI LAUREA IN SCIENZE DELL'INFORMAZIONE Studio e implementazione di un sistema di proiezione
Un applicazione di Reverse Engineering nell ambito della meccanica sperimentale
 Un applicazione di Reverse Engineering nell ambito della meccanica sperimentale Francesca Campana Cos è il Reverse Engineering Il significato di RE è molto esteso ed applicabile a vari settori dell ingegneria.
Un applicazione di Reverse Engineering nell ambito della meccanica sperimentale Francesca Campana Cos è il Reverse Engineering Il significato di RE è molto esteso ed applicabile a vari settori dell ingegneria.
La visione. Visione biologica ed elaborazione delle immagini
 La visione Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Visione biologica ed elaborazione delle immagini La percezione
La visione Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Visione biologica ed elaborazione delle immagini La percezione
Programma del corso. Introduzione Rappresentazione delle Informazioni Calcolo proposizionale Architettura del calcolatore Reti di calcolatori
 Programma del corso Introduzione Rappresentazione delle Informazioni Calcolo proposizionale Architettura del calcolatore Reti di calcolatori Il concetto di FILE FILE: sequenza di byte conosciuta nel computer
Programma del corso Introduzione Rappresentazione delle Informazioni Calcolo proposizionale Architettura del calcolatore Reti di calcolatori Il concetto di FILE FILE: sequenza di byte conosciuta nel computer
La visione 3D, una nuova dimensione per la qualità Marco Catizone Sick
 La visione 3D, una nuova dimensione per la qualità Marco Catizone Sick Sottogruppo Sistemi di Visione Introduzione I sistemi di visione nell ultimo decennio, si sono evoluti nelle prestazioni e nelle funzionalità.
La visione 3D, una nuova dimensione per la qualità Marco Catizone Sick Sottogruppo Sistemi di Visione Introduzione I sistemi di visione nell ultimo decennio, si sono evoluti nelle prestazioni e nelle funzionalità.
6) Si considerino due polarizzatori ideali (il primo orientato in direzione verticale e il secondo in
 Si considerino due polarizzatori ideali (il primo orientato in direzione verticale e il secondo in") 1) Un onda monocromatica polarizzata, con componenti del campo elettrico uguali a: E x = (1/2) 1/2 cos(kz - t) E y = (1/2) 1/2 sen(kz - t + /4), passa attraverso polarizzatori ideali, il primo orientato
1) Un onda monocromatica polarizzata, con componenti del campo elettrico uguali a: E x = (1/2) 1/2 cos(kz - t) E y = (1/2) 1/2 sen(kz - t + /4), passa attraverso polarizzatori ideali, il primo orientato
Mario Ambel, Considerazioni sulle attività da sperimentare
 Mario Ambel, Considerazioni sulle attività da sperimentare Proposte di lavoro Vi propongo un itinerario di lavoro, in parte comune e in parte differenziato per i due sottogruppi C (comprensione) e R (riscritture)
Mario Ambel, Considerazioni sulle attività da sperimentare Proposte di lavoro Vi propongo un itinerario di lavoro, in parte comune e in parte differenziato per i due sottogruppi C (comprensione) e R (riscritture)
A.A Università di Messina Facoltà di Scienze della Formazione. Disciplina. Docente. CDL e CFU. Sede di. Descrizione
 A.A. 2008-9 Università di Messina Facoltà di Scienze della Formazione Disciplina Docente CDL e CFU Sede di Informatica Alessio Plebe L-20 Scienze della comunicazione 10 CFU Messina Descrizione da 10 CFU
A.A. 2008-9 Università di Messina Facoltà di Scienze della Formazione Disciplina Docente CDL e CFU Sede di Informatica Alessio Plebe L-20 Scienze della comunicazione 10 CFU Messina Descrizione da 10 CFU
Controllo Digitale. Riassumendo. I sistemi di controllo digitale hanno alcuni vantaggi rispetto ai sistemi di controllo a tempo continuo:
 Parte 12, 1 Motivazioni Parte 12, 2 I sistemi di controllo digitale hanno alcuni vantaggi rispetto ai sistemi di controllo a tempo continuo: Controllo Digitale Flessibilità del SW rispetto all HW Compatibilità
Parte 12, 1 Motivazioni Parte 12, 2 I sistemi di controllo digitale hanno alcuni vantaggi rispetto ai sistemi di controllo a tempo continuo: Controllo Digitale Flessibilità del SW rispetto all HW Compatibilità
DEEP LEARNING PER CONTROLLO QUALITA PRODOTTO E CONTROLLO DI PROCESSO Alessandro Liani, CEO e R&D Manager
 DEEP LEARNING PER CONTROLLO QUALITA PRODOTTO E CONTROLLO DI PROCESSO Alessandro Liani, CEO e R&D Manager Smart Vision - Le tecnologie per l industria del futuro Machine Learning Famiglie di machine learning
DEEP LEARNING PER CONTROLLO QUALITA PRODOTTO E CONTROLLO DI PROCESSO Alessandro Liani, CEO e R&D Manager Smart Vision - Le tecnologie per l industria del futuro Machine Learning Famiglie di machine learning
Esempio di autenticazione non convenzionale: la biometria
 Esempio di autenticazione non convenzionale: la biometria Biometria Introduzione Vantaggi-svantaggi Riconoscimento dell iride Impronte digitali Conclusioni Introduzione (1) Misure di caratteristiche biologiche
Esempio di autenticazione non convenzionale: la biometria Biometria Introduzione Vantaggi-svantaggi Riconoscimento dell iride Impronte digitali Conclusioni Introduzione (1) Misure di caratteristiche biologiche
ISTITUTO NAZIONALE DI GEOFISICA E VULCANOLOGIA
 ISTITUTO NAZIONALE DI GEOFISICA E VULCANOLOGIA Monitoraggio vulcanologico, geochimico e delle deformazioni del suolo dello Stromboli nel periodo 3-11 novembre 2008 L analisi delle immagini registrate dalle
ISTITUTO NAZIONALE DI GEOFISICA E VULCANOLOGIA Monitoraggio vulcanologico, geochimico e delle deformazioni del suolo dello Stromboli nel periodo 3-11 novembre 2008 L analisi delle immagini registrate dalle
Grafica al Calcolatore Tecniche di mappatura - 1. Introduzione
 Grafica al Calcolatore Tecniche di mappatura - 1 Introduzione Grafica al Calcolatore Tecniche di mappatura - 2 Texture mapping Grafica al Calcolatore Tecniche di mappatura - 3 La texture può essere applicata
Grafica al Calcolatore Tecniche di mappatura - 1 Introduzione Grafica al Calcolatore Tecniche di mappatura - 2 Texture mapping Grafica al Calcolatore Tecniche di mappatura - 3 La texture può essere applicata
1 - STATO DELL ARTE DEI SISTEMI DI VIDEOSORVEGLIANZA...7
 INDICE 1 - STATO DELL ARTE DEI SISTEMI DI VIDEOSORVEGLIANZA...7 1.1 - INTRODUZIONE...7 1.2 - EVOLUZIONE DEI SISTEMI DI VIDEOSORVEGLIANZA...10 1.2.1 - Sistemi di videosorveglianza di prima generazione (first-generation
INDICE 1 - STATO DELL ARTE DEI SISTEMI DI VIDEOSORVEGLIANZA...7 1.1 - INTRODUZIONE...7 1.2 - EVOLUZIONE DEI SISTEMI DI VIDEOSORVEGLIANZA...10 1.2.1 - Sistemi di videosorveglianza di prima generazione (first-generation
La codifica del testo
 La codifica delle informazioni Informatica e sistemi di elaborazione delle informazioni La codifica delle informazioni Informatica e sistemi di elaborazione delle informazioni I slide Informatica e sistemi
La codifica delle informazioni Informatica e sistemi di elaborazione delle informazioni La codifica delle informazioni Informatica e sistemi di elaborazione delle informazioni I slide Informatica e sistemi
I SISTEMI TECNOLOGICI FERROVIARI. Roma, 4 luglio 2008
 I SISTEMI TECNOLOGICI FERROVIARI Roma, 4 luglio 2008 Per la gestione ed il controllo della circolazione dei treni lungo le principali linee della rete fondamentale con particolari esigenze di capacità
I SISTEMI TECNOLOGICI FERROVIARI Roma, 4 luglio 2008 Per la gestione ed il controllo della circolazione dei treni lungo le principali linee della rete fondamentale con particolari esigenze di capacità
La relatività generale. Lezioni d'autore
 La relatività generale Lezioni d'autore Il GPS (RaiScienze) VIDEO Einstein e la teoria della relativita (History Channel) VIDEO Einstein: dimostrazione della teoria generale della gravità (History Channel))
La relatività generale Lezioni d'autore Il GPS (RaiScienze) VIDEO Einstein e la teoria della relativita (History Channel) VIDEO Einstein: dimostrazione della teoria generale della gravità (History Channel))
NORMA EUROPEA EN 12352
 www.d-power.com D-power è una divisione DETAS S.p.A. Rezzato (BS) Tel. 030 2594120 - Fax 030 2792864 NORMA EUROPEA EN 12352 Dispositivi luminosi di preavviso e sicurezza 1 All interno della normativa per
www.d-power.com D-power è una divisione DETAS S.p.A. Rezzato (BS) Tel. 030 2594120 - Fax 030 2792864 NORMA EUROPEA EN 12352 Dispositivi luminosi di preavviso e sicurezza 1 All interno della normativa per
Il fotometro di Bunsen
 Il fotometro di Bunsen Si chiama fotometro uno strumento che ci permette di misurare quanto è intensa la luce in un certo luogo confrontandola con un valore standard o con la luce proveniente da un altra
Il fotometro di Bunsen Si chiama fotometro uno strumento che ci permette di misurare quanto è intensa la luce in un certo luogo confrontandola con un valore standard o con la luce proveniente da un altra
Trasformare e migliorare
 Trasformare e migliorare Elaborazione di immagini Da f(x,y) a g(x,y) pixel trasformati secondo un determinato algoritmo f(x,y) g(x,y) Scopi dell elaborazione Eliminazione dei disturbi Esaltazione dei particolari
Trasformare e migliorare Elaborazione di immagini Da f(x,y) a g(x,y) pixel trasformati secondo un determinato algoritmo f(x,y) g(x,y) Scopi dell elaborazione Eliminazione dei disturbi Esaltazione dei particolari
INFORmazione+autoMATICA. Perché saperne di piu? Le fasi della programmazione. Cosa intendiamo per programmazione
 INFORmazione+autoMATICA Perché saperne di piu? Calcolatore: un supporto per la rappresentazione di informazione che può: I raccogliere impressionanti quantità di dati I eseguire velocemente e con precisione
INFORmazione+autoMATICA Perché saperne di piu? Calcolatore: un supporto per la rappresentazione di informazione che può: I raccogliere impressionanti quantità di dati I eseguire velocemente e con precisione
IM-6145. Un sistema di misurazione completamente nuovo. p osi z iona re e. Sistema di misurazione dimensionale tramite immagini. Esempi di misurazione
 IM-6145 Un sistema di completamente nuovo È su ffi c iente p osi z iona re e preme re Sistema di dimensionale tramite immagini Esempi di Panoramica del sistema di dimensionale tramite immagini Obiettivo
IM-6145 Un sistema di completamente nuovo È su ffi c iente p osi z iona re e preme re Sistema di dimensionale tramite immagini Esempi di Panoramica del sistema di dimensionale tramite immagini Obiettivo
È PIÙ FACILE MISURARE. SE DALL APETTA TI FAI AIUTARE!
 È PIÙ FACILE MISURARE. SE DALL APETTA TI FAI AIUTARE! Dai diversi punti di vista alla misurazione dello spazio aula. alla mappa CLASSE SECONDA A E SECONDA B Anno scolastico 2015/16 Scuola Primaria Don
È PIÙ FACILE MISURARE. SE DALL APETTA TI FAI AIUTARE! Dai diversi punti di vista alla misurazione dello spazio aula. alla mappa CLASSE SECONDA A E SECONDA B Anno scolastico 2015/16 Scuola Primaria Don
AL DI LA DELLE IMMAGINI
 AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
Telecamere per la vision artificiale. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Telecamere per la vision artificiale Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Immagini monocromatiche Ogni cella corrisponde ad un bit. Y Row 1 1 1 1 q X 0: nero 1: bianco
Telecamere per la vision artificiale Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Immagini monocromatiche Ogni cella corrisponde ad un bit. Y Row 1 1 1 1 q X 0: nero 1: bianco
Esposizione riassuntiva
 Esposizione riassuntiva L elaborazione elettronica di immagini e video riveste un ruolo importante nello sviluppo di tecnologie per la sicurezza. Le telecamere per videosorveglianza sono molto diffuse
Esposizione riassuntiva L elaborazione elettronica di immagini e video riveste un ruolo importante nello sviluppo di tecnologie per la sicurezza. Le telecamere per videosorveglianza sono molto diffuse
"GIS e modelli idraulici per l aggiornamento del PAI in area urbana"
 Open Day Perugia 9 luglio 2012 GIS e Modelli Idraulici per il Rischio Idrogeologico "GIS e modelli idraulici per l aggiornamento del PAI in area urbana" Ing. Giorgio Cesari Autorità di bacino del Fiume
Open Day Perugia 9 luglio 2012 GIS e Modelli Idraulici per il Rischio Idrogeologico "GIS e modelli idraulici per l aggiornamento del PAI in area urbana" Ing. Giorgio Cesari Autorità di bacino del Fiume
Che cosa si intende per INFORMATICA?
 Che cosa si intende per INFORMATICA? Scienza della rappresentazione e dell elaborazione dell informazione L informazione è il concetto principale dell Informatica. L elaborazione dell informazione avviene
Che cosa si intende per INFORMATICA? Scienza della rappresentazione e dell elaborazione dell informazione L informazione è il concetto principale dell Informatica. L elaborazione dell informazione avviene
Integrali di curva e di superficie
 Capitolo 8 Integrali di curva e di superficie Studiamo ora gli integrali definiti, invece che su intervalli o su parti di piano, su curve e su superfici. Conviene premettere alcune considerazioni sui limiti
Capitolo 8 Integrali di curva e di superficie Studiamo ora gli integrali definiti, invece che su intervalli o su parti di piano, su curve e su superfici. Conviene premettere alcune considerazioni sui limiti
C. Modulo di Robotica
 Università di Pisa Corso di Laurea in Informatica Corso di Percezione Robotica C. Modulo di Robotica Cenni di Navigazione Robotica Cecilia Laschi cecilia.laschi@sssup.it Sommario della Lezione I problemi
Università di Pisa Corso di Laurea in Informatica Corso di Percezione Robotica C. Modulo di Robotica Cenni di Navigazione Robotica Cecilia Laschi cecilia.laschi@sssup.it Sommario della Lezione I problemi
Pixel MM. Definisce la corrispondenza tra le coordinate pixel e le coordinate mm
 Taratura Vs calibration Taratura È il processo di verifica del corretto funzionamento di uno strumento di misura Determina gli errori dello strumento (o il valore di un campione) Il procedimento è guidato
Taratura Vs calibration Taratura È il processo di verifica del corretto funzionamento di uno strumento di misura Determina gli errori dello strumento (o il valore di un campione) Il procedimento è guidato
Lezione. Sito, Orari, Ricevimento
 Lezioni giovedi venerdi Corso Introduzione 15.45-19.00 12:00-13:30 A3 A3 Lezione+ Lab Lezione Sito, Orari, Ricevimento Esami Il sito del corso è http://www.dis.uniroma1.it/~visiope Ricevimento: lunedì
Lezioni giovedi venerdi Corso Introduzione 15.45-19.00 12:00-13:30 A3 A3 Lezione+ Lab Lezione Sito, Orari, Ricevimento Esami Il sito del corso è http://www.dis.uniroma1.it/~visiope Ricevimento: lunedì
Fondamenti di Elaborazione di Immagini Introduzione. Raffaele Cappelli.
 Fondamenti di Elaborazione di Immagini Introduzione Raffaele Cappelli raffaele.cappelli@unibo.it Obiettivi del corso Il corso introduce i principali concetti e le tecniche di base per l elaborazione delle
Fondamenti di Elaborazione di Immagini Introduzione Raffaele Cappelli raffaele.cappelli@unibo.it Obiettivi del corso Il corso introduce i principali concetti e le tecniche di base per l elaborazione delle
Morfologia Matematica su immagini in scala di grigio
 Morfologia Matematica su immagini in scala di grigio Dilation, erosion, opening, closing Top-Hat, Bottom-Hat Algoritmi Morfologici in scala di grigio Dalle immagini binarie alle immagini in scala di grigio
Morfologia Matematica su immagini in scala di grigio Dilation, erosion, opening, closing Top-Hat, Bottom-Hat Algoritmi Morfologici in scala di grigio Dalle immagini binarie alle immagini in scala di grigio
La regola dei terzi: come usarla nelle Arti
 La regola dei terzi: come usarla nelle Arti All'interno del rettangolo che solitamente è la base dei nostri lavori ci sono una serie di potenti aree visive che gli artisti possono utilizzare per migliorare
La regola dei terzi: come usarla nelle Arti All'interno del rettangolo che solitamente è la base dei nostri lavori ci sono una serie di potenti aree visive che gli artisti possono utilizzare per migliorare
Analisi dei segnali audio basata su Deep Learning per applicazione di sicurezza
 Analisi dei segnali audio basata su Deep Learning per applicazione di sicurezza Alessandro Neri, Francesco Calabrò, Federica Battisti, Marco Carli, Federico Colangelo, BOLOGNA, 12 aprile 2017 Università
Analisi dei segnali audio basata su Deep Learning per applicazione di sicurezza Alessandro Neri, Francesco Calabrò, Federica Battisti, Marco Carli, Federico Colangelo, BOLOGNA, 12 aprile 2017 Università
Non a caso viene definito linguaggio macchina. di Cassino. C. De Stefano Corso di Fondamenti di Informatica Università degli Studi
 Un calcolatore basato sul modello di von Neumann permette l esecuzione di un programma, cioè di una sequenza di istruzioni descritte nel linguaggio interpretabile dal calcolatore che realizzano un particolare
Un calcolatore basato sul modello di von Neumann permette l esecuzione di un programma, cioè di una sequenza di istruzioni descritte nel linguaggio interpretabile dal calcolatore che realizzano un particolare
Anno 3 Equazione dell'ellisse
 Anno Equazione dell'ellisse 1 Introduzione In questa lezione affronteremo una serie di problemi che ci chiederanno di determinare l equazione di un ellisse sotto certe condizioni. Al termine della lezione
Anno Equazione dell'ellisse 1 Introduzione In questa lezione affronteremo una serie di problemi che ci chiederanno di determinare l equazione di un ellisse sotto certe condizioni. Al termine della lezione
Geometria epipolare. Filippo L.M. Milotta. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Filippo LM Milotta Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania milotta@dmiunictit 16 aprile 2015 Alcune considerazioni geometriche ci possono aiutare
Filippo LM Milotta Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania milotta@dmiunictit 16 aprile 2015 Alcune considerazioni geometriche ci possono aiutare
Grafica al Calcolatore Rendering volumetrico - 1. Introduzione
 Grafica al Calcolatore Rendering volumetrico - 1 Introduzione Grafica al Calcolatore Rendering volumetrico - 2 Studieremo sono due tecniche base per la visualizzazione di dati volumetrici: Rendering volumetrico
Grafica al Calcolatore Rendering volumetrico - 1 Introduzione Grafica al Calcolatore Rendering volumetrico - 2 Studieremo sono due tecniche base per la visualizzazione di dati volumetrici: Rendering volumetrico
TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE. Ing. Cristian Secchi Tel
 TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
TESI DISPONIBILI NELL AMBITO DELLA ROBOTICA E DELL AUTOMAZIONE Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it http://www.dismi.unimo.it/members/csecchi i i it/m / hi Haptics Un
RM Formazione dell immagine
 RM Formazione dell immagine Marco Serafini m.serafini@ausl.mo.it FUNZIONE, VARIABILE e DOMINIO Funzione: y = f(x) y = variabile dipendente x = variabile indipendente Esempio: Rappresentazione grafica:
RM Formazione dell immagine Marco Serafini m.serafini@ausl.mo.it FUNZIONE, VARIABILE e DOMINIO Funzione: y = f(x) y = variabile dipendente x = variabile indipendente Esempio: Rappresentazione grafica:
Funzioni per la descrizione delle immagini
 Funzioni per la descrizione delle immagini Problemi della rappresentazione in piel Visti i limiti del template matching, non è pensabile di realizzare un sistema efficiente di riconoscimento che si basa
Funzioni per la descrizione delle immagini Problemi della rappresentazione in piel Visti i limiti del template matching, non è pensabile di realizzare un sistema efficiente di riconoscimento che si basa
Anno scolastico 2016/2017 ROMA - Corsi di formazione. PROGRAMMAZIONE DIDATTICA di MATEMATICA I CLASSE. Relatore: Alessandra Peleggi
 Anno scolastico 2016/2017 ROMA - Corsi di formazione PROGRAMMAZIONE DIDATTICA di MATEMATICA I CLASSE Relatore: Alessandra Peleggi Data Titolo dell unità Traguardi di Competenza Obiettivi Attività e contenuti
Anno scolastico 2016/2017 ROMA - Corsi di formazione PROGRAMMAZIONE DIDATTICA di MATEMATICA I CLASSE Relatore: Alessandra Peleggi Data Titolo dell unità Traguardi di Competenza Obiettivi Attività e contenuti
Evoluzione tecnologica delle e nelle aziende aeronautiche
 tecnologica delle e nelle aziende aeronautiche 1 I sistemi avionici moderni sono basati sull integrazione delle informazioni provenienti dai molteplici sensori che concorrono alla condotta del volo (assetto,
tecnologica delle e nelle aziende aeronautiche 1 I sistemi avionici moderni sono basati sull integrazione delle informazioni provenienti dai molteplici sensori che concorrono alla condotta del volo (assetto,
RELAZIONE DI TELECOMUNICAZIONI ITIS Vobarno Titolo: Fourier: analisi di spettro
 ELAZIONE DI TELEOMUNIAZIONI ITIS Vobarno Titolo: Fourier: analisi di spettro Nome: Samuele Sandrini AT 07/0/ Un segnale periodico può essere considerato come la somma di armoniche più una costante che
ELAZIONE DI TELEOMUNIAZIONI ITIS Vobarno Titolo: Fourier: analisi di spettro Nome: Samuele Sandrini AT 07/0/ Un segnale periodico può essere considerato come la somma di armoniche più una costante che
Quantili, Mediana e Quartili. Ranking dei dati. Pietro Coretto Università degli Studi di Salerno
 Quantili, Mediana e Quartili Pietro Coretto pcoretto@unisa.it Università degli Studi di Salerno Corso di Statistica (0212700010) CDL in Economia e Management Curriculum in Management e Informatica a.a.
Quantili, Mediana e Quartili Pietro Coretto pcoretto@unisa.it Università degli Studi di Salerno Corso di Statistica (0212700010) CDL in Economia e Management Curriculum in Management e Informatica a.a.
CORSO DI FOTOGRAFIA DI PAESAGGIO
 CORSO DI FOTOGRAFIA DI PAESAGGIO Alessandro Tintori www.alessandrotintori.com photo@alessandrotintori.com 1 FILTRI ND (NEUTRAL DENSITY) Unit 11 2 Riducono l intensità della luce in maniera uniforme su
CORSO DI FOTOGRAFIA DI PAESAGGIO Alessandro Tintori www.alessandrotintori.com photo@alessandrotintori.com 1 FILTRI ND (NEUTRAL DENSITY) Unit 11 2 Riducono l intensità della luce in maniera uniforme su
Sensori per la Robotica
 Sensori per la Robotica Sensori propriocettivi (PC) Misurano grandezze proprie cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione,
Sensori per la Robotica Sensori propriocettivi (PC) Misurano grandezze proprie cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione,
Sommario. Parte I: ODEs e functions del MATLAB. Parte II: PDEs e applicazione in un problema alle differenze finite
 Sommario Parte I: ODEs e functions del MATLAB Parte II: PDEs e applicazione in un problema alle differenze finite 1 Parte I: ODEs e functions del MATLAB Consideriamo un problema a valori iniziali per un
Sommario Parte I: ODEs e functions del MATLAB Parte II: PDEs e applicazione in un problema alle differenze finite 1 Parte I: ODEs e functions del MATLAB Consideriamo un problema a valori iniziali per un
VISIONE 3D: UNA TECNOLOGIA MATURA CHE APRE NUOVE POSSIBILITA IN FONDERIA
 3D CPS 2.0 THE NEW SOLUTION VISIONE 3D: UNA TECNOLOGIA MATURA CHE APRE NUOVE POSSIBILITA IN FONDERIA Ingegner Alessandro Caprioli, PhD PRESENTAZIONI: CHI E ISS ISS, INNOVATIVE SECURITY SOLUTIONS SRL E
3D CPS 2.0 THE NEW SOLUTION VISIONE 3D: UNA TECNOLOGIA MATURA CHE APRE NUOVE POSSIBILITA IN FONDERIA Ingegner Alessandro Caprioli, PhD PRESENTAZIONI: CHI E ISS ISS, INNOVATIVE SECURITY SOLUTIONS SRL E
La percezione visiva. Fisiologia Umana. Valori di Luminanza. Il Sistema Nervoso Parte III
 La percezione visiva Fisiologia Umana Il Sistema Nervoso Parte III Banda dello spettro elettromagnetico visibile all occhio umano Giulio Sandini 64 Giulio Sandini 65 Valori di Luminanza CFF: Critical Flicker
La percezione visiva Fisiologia Umana Il Sistema Nervoso Parte III Banda dello spettro elettromagnetico visibile all occhio umano Giulio Sandini 64 Giulio Sandini 65 Valori di Luminanza CFF: Critical Flicker
GEOGRAFIA. LINGUAGGIO DELLA GEOGRAFICITA' Rappresentare a livello intuitivo ambienti noti (es. pianta dell'aula e di uno spazio conosciuto).
.") GEOGRAFIA Nella griglia sottostante sono riportati i criteri per la valutazione delle prove orali, scritte e pratiche. In sede di scrutinio la valutazione degli alunni tiene conto degli esiti delle singole
GEOGRAFIA Nella griglia sottostante sono riportati i criteri per la valutazione delle prove orali, scritte e pratiche. In sede di scrutinio la valutazione degli alunni tiene conto degli esiti delle singole
Elaborazione di segnali mediante DFT
 Elaborazione di segnali mediante DFT Alessandro Gallo - Matr. 2754 Docente: Prof. Giuseppe Rodriguez ELABORAZIONE DI SEGNALI D MEDIANTE DFT f(x) = sin(5x) f(x) +.5*randn.8.6.4.2.2.4.6.8.8.6.4.2.2.4.6.8
Elaborazione di segnali mediante DFT Alessandro Gallo - Matr. 2754 Docente: Prof. Giuseppe Rodriguez ELABORAZIONE DI SEGNALI D MEDIANTE DFT f(x) = sin(5x) f(x) +.5*randn.8.6.4.2.2.4.6.8.8.6.4.2.2.4.6.8
1 Schemi alle differenze finite per funzioni di una variabile
 Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma