15/01/2018. Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze. Mechanics. Dynamics acceleration present
|
|
|
- Rosa Grossi
- 5 anni fa
- Visualizzazioni
Transcript

1 Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze Mechanics Statics constant state of motion Dynamics acceleration present Kinetics of motionless systems Constant velocity systems Kinematics Kinetics Kinematics Kinetics 1
2 Analisi cinetica del movimento: Si concentra sulla direzione, velocità e cambio della velocità dei corpi di un oggetto Le forze prodotte durante il movimento sono importanti perché sono responsabili della creazione dei nostri movimenti e del mantenimento della postura e dell equilibrio. Analisi cinetica del movimento: In questa immagine vediamo come nel sollevamento del peso, è possibile visualizzare l informazione sia in Coppie articolari Reazione appoggio termini di coppia articolare sia in termini di forza scambiata con il pavimento 2
3 Two Dimensional Human Model What is the purpose of defining events? Modello statico 3
4 Utilità di un modello biomeccanico Modelli biomeccanici possono avere un valore diretto in termini medicosanitari: Stima delle forze che agiscono su diverse componenti o strutture per predirre il carico massimo sostenibile in una data postura Valutazione della dimensione appropriata di un ausilio o di un attrezzo di lavoro Situazione ottimale per la postura lavorativa Riepilogo sull applicazione dei sistemi di forze 4



5 Forze Le forze sono quantità vettoriali e per essere definite richiedono le seguenti caratteristiche: Ampiezza Direzione Linea di azione Punto di applicazione In assenza di una sola di queste informazioni le forze non sono definite 5
6 6
7 7
8 8
; indifferenti: se la forza applicata richiesta è uguale alla forza resistente, ovvero se il braccio-resistenza è uguale al")
9 Leve In base al rapporto tra forza resistente e forza applicata (o potenza) le leve si distinguono in: svantaggiose: se la forza applicata richiesta è maggiore della forza resistente, ovvero se il braccioresistenza è più lungo del bracciopotenza (bp / br < 1); indifferenti: se la forza applicata richiesta è uguale alla forza resistente, ovvero se il braccio-resistenza è uguale al braccio-potenza (bp / br = 1); vantaggiose: se la forza applicata richiesta è minore della forza resistente, ovvero se il braccio-resistenza è più corto del braccio-potenza (bp / br > 1); 9
10 Classificazione delle leve In base alla posizione reciproca del fulcro e delle forze le leve si distinguono in: leve di primo genere: il fulcro si trova tra le due forze (interfulcrate); possono essere vantaggiose, svantaggiose o indifferenti; leve di secondo genere: la forza resistente si trova tra fulcro e forza motrice (o potenza)(interresistente); sono sempre vantaggiose; leve di terzo genere: la forza motrice (potenza) si trova tra fulcro e forza resistente (interpotente); sono sempre svantaggiose. il fulcro si trova tra le due forze la forza resistente si trova tra fulcro e forza motrice la forza motrice (potenza) si trova tra fulcro e forza resistente 10
11 il fulcro si trova tra le due forze la forza resistente si trova tra fulcro e forza motrice la forza motrice (potenza) si trova tra fulcro e forza resistente 11

12 EQUILIBRIO STATICO DEI CORPI 12
13 Two Dimensional Human Model What is the purpose of defining events? Static Model 13

14 RE Supponiamo di avere un peso di 10 Kg retto da due braccia Il peso dell avambraccio e della mano è stimato pari a 15.8 N ME 17.2 cm WL 38.5 cm WF 14
15 Rappresentazione del corpo come modello a Link-segment Assumptions in Using a Link-segment Model Each segment has a fixed mass located as a point mass at its center of mass Joint centers are considered to be hinged or ball and socket joints Mass moment of inertia of each segment about its mass center (or either proximal or distal joints) is constant during the movement Length of each segment remains constant during the movement 15
16 Equivalence between Anatomical and Link-segment Model of the Lower Extremity M 1, M 2, and M 3, considered to be concentrated at points (center of mass of each segment) length of each segment and length from proximal and distal joints to segment center of mass considered to be fixed moments of inertia I 1, I 2, and I 3 about each center of mass considered to be fixed Forces Acting on a Link-segment Model Gravitational Forces Ground Reaction and/or External Forces Muscle and Ligament Forces Where do we obtain the data for the various parameters? 16
17 Steps in Solving Kinetic Link-Segment Problems 1. Draw free body diagram including forces (joint reaction, weight, ground reaction, other external), net muscle moments, important coordinates (e.g., center of mass of segments, ends of segments, center of pressure), segment orientation, and linear and angular acceleration Can you draw a free body diagram? Steps in Solving Kinetic Link-Segment Problems 1. Draw free body diagram including forces (joint reaction, weight, ground reaction, other external), net muscle moments, important coordinates (e.g., center of mass of segments, ends of segments, center of pressure), segment orientation, and linear and angular acceleration 17



18 Link-segment model Free-body Diagram Esempio di diagramma del corpo libero 18


19 Si assume che il rapporto b/a valga 2.4 per la maggiorparte degli individui Da dati anatomici stimiamo che le forze dell adduttore sono orientate di circa 60 gradi La forza che agisce sull anca è circa 3 volte il peso corporeo 19

20 Trasmissione delle forze e generazione muscolare 20
21 Architettura muscolare Two major fiber arrangements are found in the muscle: parallel and pennate. Parallel Fiber Arrangements In the parallel fiber arrangement, the fascicles are parallel to the long axis of the muscle. Parallel muscles have fibers running in the same direction as the whole muscle. B. Penniform muscles have fibers that run diagonally to a central tendon through the muscle. The muscle fibers of a penniform muscle do not pull in the same direction as the whole muscle. Muscoli penniformi In the second type of fiber arrangement, penniform, the fibers run diagonally with respect to a central tendon running the length of the muscle. The general shape of the penniform muscle is featherlike because the fascicles are short and run at an angle to the length of the muscle. Because the fibers of the penniform muscle run at an angle relative to the line of pull of the muscle, the force generated by each fiber is in a different direction than the muscle force 21
22 The pennation angle is the angle made between the fibers and the line of action of pull of the muscle. A muscle can attach directly into the bone (A) or indirectly via a tendon (B) or aponeurosis (C). A muscle with a small moment arm (A) needs to produce more force to generate the same torque as a muscle with a larger moment arm (B). 22

23 Potenza muscolare In questo diagramma La potenza muscolare ha due picchi positivi e due picchi negativi Tra le cause di inefficienza del movimento si annovera la cocontrazione Combinazioni equivalenti articolari: 30 Nm flessore 40 Nm flessione, 10 Nm estensione 50 Nm flessione, 20 Nm estensione Le cocontrazioni sono presenti in molte patologie, ed in particolare l emiplegia e la paralisi cerebrale infantile 23
24 Analisi statica delle forze: un esempio m=5 cm ECm=17.2 cm EH=35.5 cm Wf=15.8 N Lh=49 N Wf x Ecm + Lh x EH= Fm x m= (15.8 x 17.2 N cm+ 49 x 35.5 N cm= 20.1 Nm Scrittura delle equazioni di equilibrio La II equazione cardinale richiede l equilibrio dei momenti e si scrive necessariamente 24
25 Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze Trasmissione delle forze e generazione muscolare 25


26 Architettura muscolare Two major fiber arrangements are found in the muscle: parallel and pennate. Parallel Fiber Arrangements In the parallel fiber arrangement, the fascicles are parallel to the long axis of the muscle. Parallel muscles have fibers running in the same direction as the whole muscle. B. Penniform muscles have fibers that run diagonally to a central tendon through the muscle. The muscle fibers of a penniform muscle do not pull in the same direction as the whole muscle. Muscoli penniformi In the second type of fiber arrangement, penniform, the fibers run diagonally with respect to a central tendon running the length of the muscle. The general shape of the penniform muscle is featherlike because the fascicles are short and run at an angle to the length of the muscle. Because the fibers of the penniform muscle run at an angle relative to the line of pull of the muscle, the force generated by each fiber is in a different direction than the muscle force 26

.")
27 The pennation angle is the angle made between the fibers and the line of action of pull of the muscle. A muscle can attach directly into the bone (A) or indirectly via a tendon (B) or aponeurosis (C). Analisi statica delle forze: un esempio DIMENSIONI PROBLEMA Peso mano ed avambraccio M = EC W + EH L E F& H H (15.8 x 17.2 N cm+ 49 x 35.5 N cm= 20.1 Nm 27
28 Scrittura delle equazioni di equilibrio La II equazione cardinale richiede l equilibrio dei momenti e si scrive necessariamente Esempio di stima di moment arm del brachiale in boys and girls Vediamo che in media a 70 gradi abbiamo 19 mm per il brachiale 28

29 II ESEMPIO Il task 29


30 Schema delle forze che agiscono Schema delle forze che agiscono 30
![La forza nel bicipite è circa 10 volte la forza nella mano La reazione articolare che agisce sull articolazione è 8.5 volte Dettaglio [Brachiale]: È il più potente flessore dell'avambraccio.](/docs-images/92/110356726/images/31-1.jpg "A differenza dell'altro flessore dell'avambraccio, il muscolo bicipite brachiale, non si inserisce sul radio, quindi non partecipa alla supinazione dell'avambraccio [Bicipite]:L'azione generale del")
31 La forza nel bicipite è circa 10 volte la forza nella mano La reazione articolare che agisce sull articolazione è 8.5 volte Dettaglio [Brachiale]: È il più potente flessore dell'avambraccio. A differenza dell'altro flessore dell'avambraccio, il muscolo bicipite brachiale, non si inserisce sul radio, quindi non partecipa alla supinazione dell'avambraccio [Bicipite]:L'azione generale del bicipite è quella di flettere l'avambraccio sul braccio, e flettere il braccio sulla spalla. [Brachioradiale]: Flessione dell'avambraccio sul braccio e mantenimento dell'avambraccio in posizione intermedia tra supinazione e pronazione (posizione neutra). 31


32 Modello muscolare usato in opensym 32
33 In questa slide viene affrontato il problema della ripartizione della coppia articolare su due muscoli, in questo caso indicati come Fm1 ed Fm2 Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze 33
34 F F 50 N 50 N Si calcoli la forza muscolare richiesta per bilanciare la forza in questi due casi Per l equilibrio intorno al gomito è sufficiente imporre l equilibrio delle due forze agenti. F sin(theta) x 5 cm= 50 N x 10 cm F = 100/ sin(theta) N F F 50 N 50 N E chiaro che la forza è tanto maggiore quanto più piccolo è l angolo theta in quanto nei due casi abbiamo rispettivamente. F = 100/ sin(20 deg) N = 292 NF = 100/ sin(50 deg) N = 130 N 34
35 m=5 cm ECm=17.2 cm EH=35.5 cm Wf=15.8 N Lh=49 N Wf x Ecm + Lh x EH= Fm x m= (15.8 x 17.2 N cm+ 49 x 35.5 N cm)= 20.1 Nm In questa slide viene affrontato il problema della ripartizione della coppia articolare su due muscoli, in questo caso indicati come Fm1 ed Fm2 Si consideri che la risultante dei carichi produca un momento pari a 3800 Ncm 35
36 Valore massimo da assumere per i due muscoli Supponiamo di considerare un intensità massima di contrazione per sezione del muscolo pari a I=30N/cm2 Allora nel nostro csa considerando le sezioni Biciptie a1=10 cm2 Brachiale a2=20cm2 Abbiamo che il imiti so pari a Bicipite: Fm1=a1*I=300N Brachiale: Fm2=a2*i=600N Rappresentazione grafica dell equilibrio delle forze L equazione di equilibrio ci dice pertanto che in generale deve essere La prima condizione ci da l equilibrio al momento delle due forze agenti con bracci m1 ed m2, nel nostro caso assunti pari a 5 e 3 cm rispettivamente. Il secondo termine è il momento risultante del peso del braccio legato a WFH ed alla forza LH. Il secondo e terzo termine ci dicono i valori massimi che possono essere raggiunti dalle due forze muscolari 36
37 Facciamo allora l ipotesi di scrivere la nostra funzione da minimizzare in funzione di Fm2 nel modo seguente, sostituendo Fm1 data dalla prima relazione Fm1+ Fm2 = Fm 1 Fm 1+ N=- Fm N Questa funzione è una retta rispetto ad Fm1 (con coeff negativo), per cui ci dici che il minimo si raggiunge per il valore più grande di Fm1, ovvero Fm1=660N. Procediamo allora con il sostituire il valore di Fm1=660 N e troviamo che 2 Fm 1+ Fm2=- 660N N= N 3 Siamo in grado allora con questa equazione di risolvere il ns problema. Abbiamo due equazioni in due incognite, un sistema lineare Moltiplichiamo la seconda equazione per 5, e sottraiamo la prima equazione alla seconda per ottenere il valore di Fm2 37
38 α 100 N 38
39 F F 50 N 50 N E chiaro che la forza è tanto maggiore quanto più piccolo è l angolo theta in quanto ne casi abbiamo rispettivametne. F = 100/ sin(20 deg) N = 292 NF = 100/ sin(50 deg) N = 130 N Calcolo dei momenti articolari 25 cm Si calcoli la coppia articolare che una forza verticale di 100 N esercita a livello della spalla Si considerino le distanze indicate in cm e le forze in N 39
40 25 cm Si calcoli la coppia articolare che una forza verticale di 100 N esercita a livello della spalla Si considerino le distanze indicate in cm e le forze in N Utilizzando le dimensioni riportate si procede calcolando prodotto vettoriale Si trova pertanto per M=(D-G) F i j k = 0 Ncm = 0 Nm Sollecitazione diversa 100 N In questo caso la sollecitazione rappresenta una forza diretta in avanti, per cui nel sistema di riferimento indicato Il momento articolare a livello della spalla può essere calcolato mediante il calcolo del momento come Dove la notazione indica con (D-O) il vettore che congiungere il punto O al punto D 40
41 Sollecitazione diversa My=-12 Nm Procedendo nello svolgimento del calcolo usando la definizione di prodotto vettoriale, troviamo che 100 N Mx=10 Nm Il calcolo è equivalente a calcolare il determinante della matrice composta da 3 righe, la prima contenente i tre versori, la seconda la forza F e la terza il vettore D-O Conclusioni 41
42 Conclusioni 42
07/02/2011. Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze. Mechanics. Statics constant state of motion
 Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze Mechanics Statics constant state of motion Dynamics acceleration present Kinetics of motionless systems Constant velocity systems
Elementi di Biomeccanica Statica, Cinetica, Esercizi sull analisi delle forze Mechanics Statics constant state of motion Dynamics acceleration present Kinetics of motionless systems Constant velocity systems
Domande. Test 1. D 2. A 3. C 4. A 5. C 6. C 7. D 8. D 9. D
 Domande 1. Quando l auto frena bruscamente, la parte superiore del corpo continua a muoversi in avanti (come prevede la prima legge di Newton), se la forza esercitata dai muscoli inferiori posteriori non
Domande 1. Quando l auto frena bruscamente, la parte superiore del corpo continua a muoversi in avanti (come prevede la prima legge di Newton), se la forza esercitata dai muscoli inferiori posteriori non
Sherwood, FISIOLOGIA UMANA. Dalle cellule ai sistemi, Zanichelli editore S.p.A. Copyright
 8 1 8 2 8 3 8 4 I muscoli come leve Tendine di Achille Muscoli della nuca Muscolo bicipite A: leva di primo tipo (articolazione atlanto-occipitale), svantaggiosa, I genere B: leva di secondo II genere
8 1 8 2 8 3 8 4 I muscoli come leve Tendine di Achille Muscoli della nuca Muscolo bicipite A: leva di primo tipo (articolazione atlanto-occipitale), svantaggiosa, I genere B: leva di secondo II genere
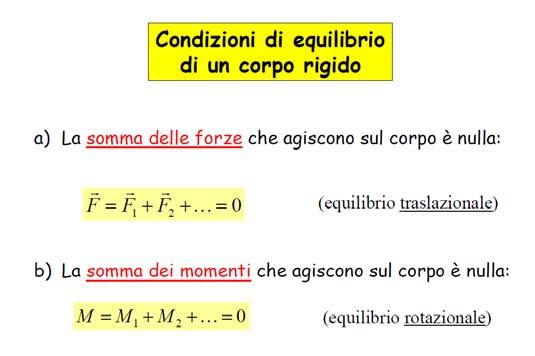
Studia le condizioni di equilibrio dei corpi. Caso particolare della dinamica: forze presenti, ma nessuna variazione di movimento.
 Studia le condizioni di equilibrio dei corpi. Caso particolare della dinamica: forze presenti, ma nessuna variazione di movimento. Massa: misura della quantità di materia di un corpo, ha la proprietà dell
Studia le condizioni di equilibrio dei corpi. Caso particolare della dinamica: forze presenti, ma nessuna variazione di movimento. Massa: misura della quantità di materia di un corpo, ha la proprietà dell
Statica. Equilibrio dei corpi Corpo rigido Momento di una forza Condizione di equilbrio Leve
 Statica Equilibrio dei corpi Corpo rigido Momento di una forza Condizione di equilbrio Leve Statica La statica è la parte della meccanica che studia l equilibrio di un corpo materiale, ovvero le condizioni
Statica Equilibrio dei corpi Corpo rigido Momento di una forza Condizione di equilbrio Leve Statica La statica è la parte della meccanica che studia l equilibrio di un corpo materiale, ovvero le condizioni
Study of motion considering FORCES and CAUSES of movement
 Gait Analysis report: Kinetics Practical Session of the course Basics in Motion Analysis - TRAMA Network Project 13-21st September 2007 Kinetics It studies the elements which control and produce the movement
Gait Analysis report: Kinetics Practical Session of the course Basics in Motion Analysis - TRAMA Network Project 13-21st September 2007 Kinetics It studies the elements which control and produce the movement
Statica. Equilibrio dei corpi Corpo rigido Momento di una forza Condizioni di equilibrio Leve
 Statica Equilibrio dei corpi Corpo rigido Momento di una forza Condizioni di equilibrio Leve Statica La statica è la parte della meccanica che studia l equilibrio di un corpo materiale, ovvero le condizioni
Statica Equilibrio dei corpi Corpo rigido Momento di una forza Condizioni di equilibrio Leve Statica La statica è la parte della meccanica che studia l equilibrio di un corpo materiale, ovvero le condizioni
La Statica. La statica è una parte della meccanica che studia l equilibrio dei corpi. Prof Giovanni Ianne
 La Statica La statica è una parte della meccanica che studia l equilibrio dei corpi. Sistemi rigidi ed equilibrio Un corpo è in equilibrio quando è fermo e continua a restare fermo. Il punto materiale
La Statica La statica è una parte della meccanica che studia l equilibrio dei corpi. Sistemi rigidi ed equilibrio Un corpo è in equilibrio quando è fermo e continua a restare fermo. Il punto materiale
Attività motoria: metodologia e storia dell'educazione fisica e dello sport Modulo 1 Il movimento umano
 Attività motoria: metodologia e storia dell'educazione fisica e dello sport Modulo 1 Il movimento umano PhD video Il movimento umano Interazione di catene cinetiche coordinate tra loro sotto il controllo
Attività motoria: metodologia e storia dell'educazione fisica e dello sport Modulo 1 Il movimento umano PhD video Il movimento umano Interazione di catene cinetiche coordinate tra loro sotto il controllo
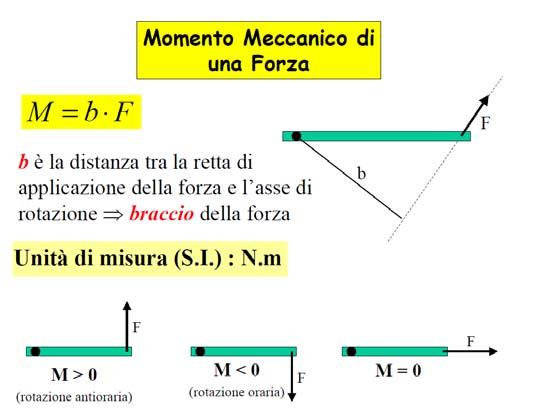
MOMENTO DI UNA DI FORZA. Il momento è responsabile delle rotazioni del corpo intorno all asse di rotazione passante per il vincolo nel punto O.
 MOMENTO DI UNA DI ORZA Il momento è responsabile delle rotazioni del corpo intorno all asse di rotazione passante per il vincolo nel punto O. M = r = r sinα M = N L = M L T 2 L = ML 2 T 2 1 MOMENTO DI
MOMENTO DI UNA DI ORZA Il momento è responsabile delle rotazioni del corpo intorno all asse di rotazione passante per il vincolo nel punto O. M = r = r sinα M = N L = M L T 2 L = ML 2 T 2 1 MOMENTO DI
STATICA Equilibrio dei solidi
 FISICA STATICA Equilibrio dei solidi Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica EQUILIBRIO DI UN PUNTO MATERIALE Un corpo è in equilibrio quando è fermo e continua a restare fermo.
FISICA STATICA Equilibrio dei solidi Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica EQUILIBRIO DI UN PUNTO MATERIALE Un corpo è in equilibrio quando è fermo e continua a restare fermo.
Datemi un punto d'appoggio e solleverò il mondo. (Archimede)
") Datemi un punto d'appoggio e solleverò il mondo. (Archimede) Le leve Le leve sono macchine semplici che consentono di svolgere lavoro con minore energia. LA LEVA è una macchina semplice Le macchine semplici:
Datemi un punto d'appoggio e solleverò il mondo. (Archimede) Le leve Le leve sono macchine semplici che consentono di svolgere lavoro con minore energia. LA LEVA è una macchina semplice Le macchine semplici:
Fisica Applicata, Area Tecnica, M. Ruspa. LAVORO ed ENERGIA
 LAVORO ed ENERGIA F m Δs F s LAVORO F Se la forza e costante durante lo spostamento F Δs F Δs >> Unita di misura nel S.I. ESERCIZIO Un infermiere spinge un paziente di 72 kg su una barella di 15 Kg, conferendo
LAVORO ed ENERGIA F m Δs F s LAVORO F Se la forza e costante durante lo spostamento F Δs F Δs >> Unita di misura nel S.I. ESERCIZIO Un infermiere spinge un paziente di 72 kg su una barella di 15 Kg, conferendo
I n s e g n a m e n t o d i BIOMECCANICA
 A A 2014-2015 U N I V E R S I T A D E G L I S T U D I DI R O M A T O R V E R G AT A F A C O LT A DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
A A 2014-2015 U N I V E R S I T A D E G L I S T U D I DI R O M A T O R V E R G AT A F A C O LT A DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
Momento di una forza:
 omento di una forza: d 1 d 2 d C In quale situazione la persona percepisce di più il peso del corpo? D d o? C o D? 1 2 1 2 L altalena è in equilibrio? Dipende dalla distanza d1 e d2 e dalle due forze:
omento di una forza: d 1 d 2 d C In quale situazione la persona percepisce di più il peso del corpo? D d o? C o D? 1 2 1 2 L altalena è in equilibrio? Dipende dalla distanza d1 e d2 e dalle due forze:
L EQUILIBRIO DEL PUNTO MATERIALE
 1 L EQUILIBRIO DEL PUNTO MATERIALE La statica studia l equilibrio dei corpi. Un corpo è in equilibrio se è fermo e persevera nel suo stato di quiete al trascorrere del tempo. Un modello è la semplificazione
1 L EQUILIBRIO DEL PUNTO MATERIALE La statica studia l equilibrio dei corpi. Un corpo è in equilibrio se è fermo e persevera nel suo stato di quiete al trascorrere del tempo. Un modello è la semplificazione
IL CANNOCCHIALE DI GALILEO MODULO: SALTARE GLI OSTACOLI2 Docente Esperto: Prof.ssa Angela Corso Docente tutor: Prof. Michele Panza
 Progetto F.O.R. RENDE: Formazione, Orientamento, Riqualificazione. Il territorio in rete: osservare i fattori di rischio per progettare e realizzare percorsi formativi efficaci codice nazionale: F-3-FSE-2013-16
Progetto F.O.R. RENDE: Formazione, Orientamento, Riqualificazione. Il territorio in rete: osservare i fattori di rischio per progettare e realizzare percorsi formativi efficaci codice nazionale: F-3-FSE-2013-16
I n s e g n a m e n t o d i BIOMECCANICA
 A A 2 0 1 3-2014 U N I V E R S I TA D E G L I S T U D I DI R O M A T O R V E R G ATA F A C O LTA DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
A A 2 0 1 3-2014 U N I V E R S I TA D E G L I S T U D I DI R O M A T O R V E R G ATA F A C O LTA DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
DOCENTE:Galizia Rocco MATERIA: Fisica
 COMPITI PER LE VACANZE ESTIVE E INDICAZIONI PER IL RECUPERO DEL DEBITO FORMATIVO DOCENTE:Galizia Rocco MATERIA: Fisica CONTENUTI Teoria CLASSE 1 BL3 Anno scolastico 2016-2017 INTRODUZIONE AL METODO SCIENTIFICO
COMPITI PER LE VACANZE ESTIVE E INDICAZIONI PER IL RECUPERO DEL DEBITO FORMATIVO DOCENTE:Galizia Rocco MATERIA: Fisica CONTENUTI Teoria CLASSE 1 BL3 Anno scolastico 2016-2017 INTRODUZIONE AL METODO SCIENTIFICO
Momento di una forza:
 omento di una forza: d 1 d 2 d C In quale situazione la persona percepisce di più il peso del corpo? D d o? C o D? 1 2 1 2 L altalena è in equilibrio? Dipende dalla distanza d1 e d2 e dalle due forze:
omento di una forza: d 1 d 2 d C In quale situazione la persona percepisce di più il peso del corpo? D d o? C o D? 1 2 1 2 L altalena è in equilibrio? Dipende dalla distanza d1 e d2 e dalle due forze:
Momento delle forze e equilibrio di un corpo rigido
 Momento delle forze e equilibrio di un corpo rigido F r r F + F = 0 Equilibrio? NO Il corpo può ruotare F Perche un corpo esteso sia in equilibrio non basta imporre che la somma delle forze che agiscono
Momento delle forze e equilibrio di un corpo rigido F r r F + F = 0 Equilibrio? NO Il corpo può ruotare F Perche un corpo esteso sia in equilibrio non basta imporre che la somma delle forze che agiscono
Introduzione. Michelangelo Laterza Principi di Statica e di Dinamica delle Strutture
 Introduzione La meccanica è quella parte delle scienze applicate che studia le forze ed il moto. In questo campo è fondamentale la nozione di equilibrio, ovvero la condizione che si instaura quando le
Introduzione La meccanica è quella parte delle scienze applicate che studia le forze ed il moto. In questo campo è fondamentale la nozione di equilibrio, ovvero la condizione che si instaura quando le
L'effetto di più forze su un corpo rigido. Forze che agiscono sulla stessa retta. Forze concorrenti
 L'effetto di più forze su un corpo rigido La regola generale dice che se su un punto materiale vengono applicate due o più forze, la forza risultante è uguale alla loro somma vettoriale. Ma il problema
L'effetto di più forze su un corpo rigido La regola generale dice che se su un punto materiale vengono applicate due o più forze, la forza risultante è uguale alla loro somma vettoriale. Ma il problema
Compito ) Cognome Nome Data Classe
 Cognome Nome Data Classe") Compito 999568 1 ) Cognome Nome Data Classe Scegliere le risposte corrette e poi scriverle nella riga in fondo al foglio 2) Con riferimento alla figura seguente, calcola il momento della forza di modulo
Compito 999568 1 ) Cognome Nome Data Classe Scegliere le risposte corrette e poi scriverle nella riga in fondo al foglio 2) Con riferimento alla figura seguente, calcola il momento della forza di modulo
Corso di meccanica, macchine e disegno VD 2013/2014 Modulo UD Lez. Esercizi svolti di statica pag. 1
 orso di meccanica, macchine e disegno VD 2013/2014 Modulo UD Lez. Esercizi svolti di statica pag. 1 1) Un triangolo rettangolo presenta l ipotenusa lunga 5m mentre l angolo formato con uno dei due cateti
orso di meccanica, macchine e disegno VD 2013/2014 Modulo UD Lez. Esercizi svolti di statica pag. 1 1) Un triangolo rettangolo presenta l ipotenusa lunga 5m mentre l angolo formato con uno dei due cateti
Capitolo 4. L equilibrio dei solidi
 Capitolo 4 L equilibrio dei solidi 1 L equilibrio dei corpi Un corpo è in equilibrio quando è fermo e rimane fermo. 2 Il modello del punto materiale Un punto materiale è un oggetto che è considerato un
Capitolo 4 L equilibrio dei solidi 1 L equilibrio dei corpi Un corpo è in equilibrio quando è fermo e rimane fermo. 2 Il modello del punto materiale Un punto materiale è un oggetto che è considerato un
Il punto materiale e il corpo rigido
 5_L'equilibrio dei solidi Pagina 15 di 21 Il punto materiale e il corpo rigido Per punto materiale intendiamo un qualsiasi corpo le cui dimensioni sono trascurabili rispetto all ambiente in cui si trova.
5_L'equilibrio dei solidi Pagina 15 di 21 Il punto materiale e il corpo rigido Per punto materiale intendiamo un qualsiasi corpo le cui dimensioni sono trascurabili rispetto all ambiente in cui si trova.
Lezione 5. L equilibrio dei corpi. Lavoro ed energia.
 Lezione 5 L equilibrio dei corpi. Lavoro ed energia. Statica E la parte della Meccanica che studia l equilibrio dei corpi. Dai principi della dinamica sappiamo che se su un corpo agiscono delle forze allora
Lezione 5 L equilibrio dei corpi. Lavoro ed energia. Statica E la parte della Meccanica che studia l equilibrio dei corpi. Dai principi della dinamica sappiamo che se su un corpo agiscono delle forze allora
Calcolare la tensione T della corda e la reazione vincolare N in C.
 1 Esercizio Un cilindro di raggio R = 20 cm e massa m = 150 Kg è appoggiato su un piano inclinato di un angolo θ = 30 o ed è tenuto fermo da una corda tesa orizzontalmente; l attrito statico tra il cilindro
1 Esercizio Un cilindro di raggio R = 20 cm e massa m = 150 Kg è appoggiato su un piano inclinato di un angolo θ = 30 o ed è tenuto fermo da una corda tesa orizzontalmente; l attrito statico tra il cilindro
Nome..Cognome.. Classe 4D 18 dicembre VERIFICA DI FISICA: lavoro ed energia
 Nome..Cognome.. Classe 4D 8 dicembre 008 EIFICA DI FISICA: lavoro ed energia Domande ) Forze conservative ed energia potenziale: (punti:.5) a) Dai la definizione di forza conservativa ed indicane le proprietà.
Nome..Cognome.. Classe 4D 8 dicembre 008 EIFICA DI FISICA: lavoro ed energia Domande ) Forze conservative ed energia potenziale: (punti:.5) a) Dai la definizione di forza conservativa ed indicane le proprietà.
CORPO RIGIDO MOMENTO DI UNA FORZA EQUILIBRIO DI UN CORPO RIGIDO CENTRO DI MASSA BARICENTRO
 LEZIONE statica-1 CORPO RIGIDO MOMENTO DI UNA FORZA EQUILIBRIO DI UN CORPO RIGIDO CENTRO DI MASSA BARICENTRO GRANDEZZE SCALARI E VETTORIALI: RICHIAMI DUE SONO LE TIPOLOGIE DI GRANDEZZE ESISTENTI IN FISICA
LEZIONE statica-1 CORPO RIGIDO MOMENTO DI UNA FORZA EQUILIBRIO DI UN CORPO RIGIDO CENTRO DI MASSA BARICENTRO GRANDEZZE SCALARI E VETTORIALI: RICHIAMI DUE SONO LE TIPOLOGIE DI GRANDEZZE ESISTENTI IN FISICA
BARBERI RICCARDO CRISTOFORO
 Testi del Syllabus Docente BARBERI RICCARDO CRISTOFORO Matricola: 002624 Anno offerta: 2012/2013 Insegnamento: 27005185 - MECCANICA SPERIMENTALE PARTE B Corso di studio: 0729 - SCIENZA DEI MATERIALI INNOVATIVI
Testi del Syllabus Docente BARBERI RICCARDO CRISTOFORO Matricola: 002624 Anno offerta: 2012/2013 Insegnamento: 27005185 - MECCANICA SPERIMENTALE PARTE B Corso di studio: 0729 - SCIENZA DEI MATERIALI INNOVATIVI
I principio (P. di Inerzia o di Galileo): Un corpo preserva il suo stato di quiete o di moto rettilineo uniforme finchè una forza esterna non
: Un corpo preserva il suo stato di quiete o di moto rettilineo uniforme finchè una forza esterna non") I principio (P. di Inerzia o di Galileo): Un corpo preserva il suo stato di quiete o di moto rettilineo uniforme finchè una forza esterna non interviene a modificarlo. II principio (Legge di Newton): esprime
I principio (P. di Inerzia o di Galileo): Un corpo preserva il suo stato di quiete o di moto rettilineo uniforme finchè una forza esterna non interviene a modificarlo. II principio (Legge di Newton): esprime
Le condizioni di equilibrio di un punto materiale Giuseppe Frangiamore con la collaborazione di Daniele Alessi
 Le condizioni di equilibrio di un punto materiale Giuseppe Frangiamore con la collaborazione di Daniele Alessi Un punto materiale soggetto a più forze rimane in equilibrio se il vettore risultante (R)
Le condizioni di equilibrio di un punto materiale Giuseppe Frangiamore con la collaborazione di Daniele Alessi Un punto materiale soggetto a più forze rimane in equilibrio se il vettore risultante (R)
FORZE E PRINCIPI DELLA DINAMICA (1/29)
") FORZE E PRINCIPI DELLA DINAMICA (1/29) una forza applicata ad un corpo, libero di muoversi, lo mette in movimento o lo arresta (effetto dinamico della forza); una forza, applicata ad un corpo vincolato,
FORZE E PRINCIPI DELLA DINAMICA (1/29) una forza applicata ad un corpo, libero di muoversi, lo mette in movimento o lo arresta (effetto dinamico della forza); una forza, applicata ad un corpo vincolato,
I COMPARTIMENTI DEL BRACCIO
 I COMPARTIMENTI DEL BRACCIO I MUSCOLI DEL BRACCIO sono disposti in due compartimenti: anteriore (flessore) e posteriore (estensore) separati dall omero e da setti intermuscolari. Questi muscoli svolgono
I COMPARTIMENTI DEL BRACCIO I MUSCOLI DEL BRACCIO sono disposti in due compartimenti: anteriore (flessore) e posteriore (estensore) separati dall omero e da setti intermuscolari. Questi muscoli svolgono
DC-Servomechanism. Alberto Bemporad. Corso di Teoria dei Sistemi (Diploma) a.a. 2000/2001
 a.a. 2000/2001") DC-Servomechanism Alberto Bemporad Corso di Teoria dei Sistemi (Diploma) a.a. 2000/2001 Figure 1: Servomechanism model (modello del servomeccanismo). 1 Corso di Teoria dei Sistemi (Diploma), Università
DC-Servomechanism Alberto Bemporad Corso di Teoria dei Sistemi (Diploma) a.a. 2000/2001 Figure 1: Servomechanism model (modello del servomeccanismo). 1 Corso di Teoria dei Sistemi (Diploma), Università
MECCANICA. Laboratorio GRU E MEZZI ELEVATORI. Costruzioni da 1 a 35
 Laboratorio 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 9 0 di i MECCANICA GRU E MEZZI ELEVATORI Costruzioni da a 5 Sovrapposizione di due barre Sovrapposizione di barre con due chiodini Congiunzione di barre
Laboratorio 4 5 6 7 8 9 0 4 5 6 7 8 9 0 4 5 6 7 8 9 0 di i MECCANICA GRU E MEZZI ELEVATORI Costruzioni da a 5 Sovrapposizione di due barre Sovrapposizione di barre con due chiodini Congiunzione di barre
Equilibrio di un punto materiale su un piano
 1 Equilirio di un punto materiale su un piano no inclinato Se un corpo si trova su un piano inclinato, possiamo scomporre il suo peso in due componenti: una parallela al piano, l'altra perpendicolare.
1 Equilirio di un punto materiale su un piano no inclinato Se un corpo si trova su un piano inclinato, possiamo scomporre il suo peso in due componenti: una parallela al piano, l'altra perpendicolare.
Applicazioni (condotti, macchine a fluido, apparati vari parte I)
") Equazioni di Bilancio Applicazioni (condotti, macchine a fluido, apparati vari parte I) Applicazioni Equaz.Bilancio 1 Review: L ultima lezione abbiamo derivato lo strumento matematico chiamato Teorema
Equazioni di Bilancio Applicazioni (condotti, macchine a fluido, apparati vari parte I) Applicazioni Equaz.Bilancio 1 Review: L ultima lezione abbiamo derivato lo strumento matematico chiamato Teorema
F80 / F80S F SERIES BRAKES TECHNICAL CATALOGUE CATALOGO TECNICO FRENI SERIE F. 15 Springs / Molle
 F80 / F80S 15 Springs / Molle 22 Springs / Molle Static braking torque 1 Coppia statica frenante Minimum opening pressure 2 Pressione minima di apertura Maximum opening pressure Pressione massima di apertura
F80 / F80S 15 Springs / Molle 22 Springs / Molle Static braking torque 1 Coppia statica frenante Minimum opening pressure 2 Pressione minima di apertura Maximum opening pressure Pressione massima di apertura
L Equilibrio dei Corpi Solidi
 L Equilibrio dei Corpi Solidi 1 L Equilibrio dei Corpi Solidi Punto Materiale Le reazioni vincolari Corpo igido Baricentro Momento di una forza Momento di una coppia Equilibrio e Stabilità Le Macchine
L Equilibrio dei Corpi Solidi 1 L Equilibrio dei Corpi Solidi Punto Materiale Le reazioni vincolari Corpo igido Baricentro Momento di una forza Momento di una coppia Equilibrio e Stabilità Le Macchine
Prof. Francesco Sgrò Assistant Professor Metodi e strumenti per l analisi biomeccanica della prestazione motoria
 Università degli Studi Kore di Enna Facoltà di Scienze dell uomo e della società Corso di Laurea Magistrale in Scienze e tecniche delle attività motorie preventive e adattate A.A. 2016-2017 Metodi e strumenti
Università degli Studi Kore di Enna Facoltà di Scienze dell uomo e della società Corso di Laurea Magistrale in Scienze e tecniche delle attività motorie preventive e adattate A.A. 2016-2017 Metodi e strumenti
Le macchine semplici. Leve Carrucole Paranco Verricello Argano Piano Inclinato Vite
 Le macchine semplici Leve Carrucole Paranco Verricello Argano Piano Inclinato Vite Le macchine semplici Le macchine semplici sono chiamate così perché non si possono scomporre in macchine ancora più elementari.
Le macchine semplici Leve Carrucole Paranco Verricello Argano Piano Inclinato Vite Le macchine semplici Le macchine semplici sono chiamate così perché non si possono scomporre in macchine ancora più elementari.
L equilibrio dei corpi solidi
 1 L equilibrio dei corpi Quando un corpo è fermo e rimane fermo al trascorrere del tempo, diciamo che quel corpo è in equilibrio. Si definisce corpo rigido un corpo che non si deforma nonostante su di
1 L equilibrio dei corpi Quando un corpo è fermo e rimane fermo al trascorrere del tempo, diciamo che quel corpo è in equilibrio. Si definisce corpo rigido un corpo che non si deforma nonostante su di
MECCANICA. Laboratorio AUTO DA CORSA. Costruzioni da 1 a 30
 4 Laboratorio di MECCANICA AUTO DA CORSA Costruzioni da 1 a 0 1-Sovrapposizione di due barre -Sovrapposizione di barre con due chiodini -Congiunzione di barre 4-Sovrapposizione di tre barre 5-Sovrapposizione
4 Laboratorio di MECCANICA AUTO DA CORSA Costruzioni da 1 a 0 1-Sovrapposizione di due barre -Sovrapposizione di barre con due chiodini -Congiunzione di barre 4-Sovrapposizione di tre barre 5-Sovrapposizione
COMPITI PER LE VACANZE ESTIVE E LA PREPARAZIONE PER LA VERIFICA DELLA SOSPENSIONE DEL GIUDIZIO. CLASSE 1 BL3 Anno scolastico
 COMPITI PER LE VACANZE ESTIVE E LA PREPARAZIONE PER LA VERIFICA DELLA SOSPENSIONE DEL GIUDIZIO DOCENTE: Galizia Rocco MATERIA: Fisica CONTENUTI Teoria CLASSE 1 BL3 Anno scolastico 2015-2016 INTRODUZIONE
COMPITI PER LE VACANZE ESTIVE E LA PREPARAZIONE PER LA VERIFICA DELLA SOSPENSIONE DEL GIUDIZIO DOCENTE: Galizia Rocco MATERIA: Fisica CONTENUTI Teoria CLASSE 1 BL3 Anno scolastico 2015-2016 INTRODUZIONE
C Dott. Claudio Costa Ing. Biomedico Indirizzo Biomeccanico Laureato al Politecnico di Torino. Analisi Biomeccanica e Ingegneria della Riabilitazione
 C C Dott. Claudio Costa Ing. Biomedico Indirizzo Biomeccanico Laureato al Politecnico di Torino Analisi Biomeccanica e Ingegneria della Riabilitazione Controllo Nervoso e Muscolare del Movimento L atto
C C Dott. Claudio Costa Ing. Biomedico Indirizzo Biomeccanico Laureato al Politecnico di Torino Analisi Biomeccanica e Ingegneria della Riabilitazione Controllo Nervoso e Muscolare del Movimento L atto
Physics [for life science] by examples Draft 0. Problems:
![Physics [for life science] by examples Draft 0. Problems:](/thumbs/95/125565255.jpg "Physics [for life science] by examples Draft 0. Problems:") Physics [for life science] by examples Draft 0 Problems: Problem 1: The average height of vertical jumps from standing still is about h=0.6 m for volleyball defenders. Find their initial vertical velocity,
Physics [for life science] by examples Draft 0 Problems: Problem 1: The average height of vertical jumps from standing still is about h=0.6 m for volleyball defenders. Find their initial vertical velocity,
VERIFICA L equilibrio dei corpi e le macchine semplici
 ERIICA L equilibrio dei corpi e le macchine semplici Cognome Nome Classe Data I/1 ero o also? Se un corpo è immobile si trova in una situazione di equilibrio Un corpo appoggiato su un piano può restare
ERIICA L equilibrio dei corpi e le macchine semplici Cognome Nome Classe Data I/1 ero o also? Se un corpo è immobile si trova in una situazione di equilibrio Un corpo appoggiato su un piano può restare
Constant Propagation. A More Complex Semilattice A Nondistributive Framework
 Constant Propagation A More Complex Semilattice A Nondistributive Framework 1 The Point Instead of doing constant folding by RD s, we can maintain information about what constant, if any, a variable has
Constant Propagation A More Complex Semilattice A Nondistributive Framework 1 The Point Instead of doing constant folding by RD s, we can maintain information about what constant, if any, a variable has
F, viene allungata o compressa di un tratto s rispetto alla sua posizione di equilibrio.
 UNIÀ 4 L EQUILIBRIO DEI SOLIDI.. La forza elastica di una molla.. La costante elastica e la legge di Hooke. 3. La forza peso. 4. Le forze di attrito. 5. La forza di attrito statico. 6. La forza di attrito
UNIÀ 4 L EQUILIBRIO DEI SOLIDI.. La forza elastica di una molla.. La costante elastica e la legge di Hooke. 3. La forza peso. 4. Le forze di attrito. 5. La forza di attrito statico. 6. La forza di attrito
Programma delle lezioni e delle esercitazioni
 Programma Programma delle lezioni e delle esercitazioni 1. Introduzione allo studio del Movimento 2.1. Obiettivi della valutazione quantitativa del movimento umano. 2.2. Uso dell'analisi della postura
Programma Programma delle lezioni e delle esercitazioni 1. Introduzione allo studio del Movimento 2.1. Obiettivi della valutazione quantitativa del movimento umano. 2.2. Uso dell'analisi della postura
STATICA DEI CORPI RIGIDI
 STUDIA L EQUILIBRIO In questa lezione affronteremo l equilibrio del punto materiale e del corpo rigido F 4 P F 3 STATICA DEI CORPI RIGIDI Equilibrio del punto materiale ΣF=0? F 1 A R 1 F 2 R 3 R 2 B R
STUDIA L EQUILIBRIO In questa lezione affronteremo l equilibrio del punto materiale e del corpo rigido F 4 P F 3 STATICA DEI CORPI RIGIDI Equilibrio del punto materiale ΣF=0? F 1 A R 1 F 2 R 3 R 2 B R
F80S F SERIES BRAKES TECHNICAL CATALOGUE CATALOGO TECNICO FRENI SERIE F. 15 Springs / Molle
 F80S 5 Springs / Molle 22 Springs / Molle Static braking torque Coppia statica frenante Minimum opening pressure 2 Pressione minima di apertura Maximum opening pressure Pressione massima di apertura Dry
F80S 5 Springs / Molle 22 Springs / Molle Static braking torque Coppia statica frenante Minimum opening pressure 2 Pressione minima di apertura Maximum opening pressure Pressione massima di apertura Dry
Momento di una forza. Si definisce momento di una forza F rispetto ad un punto O il prodotto vettoriale
 3. Biomeccanica 1 Momento di una forza O b P F Si definisce momento di una forza F rispetto ad un punto O il prodotto vettoriale M = b F 2 Ricordi il prodotto vettoriale???? 3 Prodotto Vettoriale Il prodotto
3. Biomeccanica 1 Momento di una forza O b P F Si definisce momento di una forza F rispetto ad un punto O il prodotto vettoriale M = b F 2 Ricordi il prodotto vettoriale???? 3 Prodotto Vettoriale Il prodotto
TABELLE TECNICHE TECHNICAL TABLES
 TABELLE TECNICHE 59 CILINDRI IDRAULICI ISO 020/2 ISO 020/2 HYDRAULIC CYLINDERS TABELLE TECNICHE VERIFICA DEL CARICO DI PUNTA / BUCKLING VERIFICATION Quando il cilindro lavora in spinta, lo stelo del cilindro
TABELLE TECNICHE 59 CILINDRI IDRAULICI ISO 020/2 ISO 020/2 HYDRAULIC CYLINDERS TABELLE TECNICHE VERIFICA DEL CARICO DI PUNTA / BUCKLING VERIFICATION Quando il cilindro lavora in spinta, lo stelo del cilindro
Mobile Robot Motion Control. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Mobile Robot Motion Control Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Pose Controller Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Pose Controller
Mobile Robot Motion Control Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Pose Controller Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Pose Controller
ENGINE COMPONENT DESIGN Cap. 7 AIAA AIRCRAFT ENGINE DESIGN R03-23/10/2013
 CORSO DI LAUREA MAGISTRALE IN Ingegneria Aerospaziale PROPULSION AND COMBUSTION ENGINE COMPONENT DESIGN Cap. 7 AIAA AIRCRAFT ENGINE DESIGN R03-23/10/2013 LA DISPENSA E DISPONIBILE SU http://www.ingegneriaindustriale.unisalento.it/scheda_docente/-/people
CORSO DI LAUREA MAGISTRALE IN Ingegneria Aerospaziale PROPULSION AND COMBUSTION ENGINE COMPONENT DESIGN Cap. 7 AIAA AIRCRAFT ENGINE DESIGN R03-23/10/2013 LA DISPENSA E DISPONIBILE SU http://www.ingegneriaindustriale.unisalento.it/scheda_docente/-/people
Fisica dei Materiali A.A Dinamica III. P.A. Tipler, "Invito alla Fisica", volume 1, Zanichelli 2001, 5.2, 5.3, 6.5
 Dinamica III.A. Tipler, "Invito alla isica", volume 1, Zanichelli 2001, 5.2, 5.3, 6.5 A.A. 2003-2004 isica dei Materiali 71 Equilibrio statico di un corpo esteso La statica è quella parte della dinamica
Dinamica III.A. Tipler, "Invito alla isica", volume 1, Zanichelli 2001, 5.2, 5.3, 6.5 A.A. 2003-2004 isica dei Materiali 71 Equilibrio statico di un corpo esteso La statica è quella parte della dinamica
Rette e piani in R 3
 Rette e piani in R 3 In questa dispensa vogliamo introdurre in modo elementare rette e piani nello spazio R 3 (si faccia riferimento anche al testo Algebra Lineare di S. Lang). 1 Rette in R 3 Vogliamo
Rette e piani in R 3 In questa dispensa vogliamo introdurre in modo elementare rette e piani nello spazio R 3 (si faccia riferimento anche al testo Algebra Lineare di S. Lang). 1 Rette in R 3 Vogliamo
Scelta di uno scambiatore di calore serie aria /olio
 Scelta di uno scambiatore di calore serie aria /olio Di seguito spiegheremo brevemente come procedere alla scelta dello scambiatore di calore più idoneo a partire dai dati in proprio possesso. La scelta
Scelta di uno scambiatore di calore serie aria /olio Di seguito spiegheremo brevemente come procedere alla scelta dello scambiatore di calore più idoneo a partire dai dati in proprio possesso. La scelta
Esercizi svolti di dinamica
 Esercizi svolti di dinamica Problema Una cassa si trova in cima ad un piano inclinato di 30, ad un altezza di 5 m dal suolo Sul piano inclinato è presente attrito dinamico di coefficiente µ = 0, La cassa
Esercizi svolti di dinamica Problema Una cassa si trova in cima ad un piano inclinato di 30, ad un altezza di 5 m dal suolo Sul piano inclinato è presente attrito dinamico di coefficiente µ = 0, La cassa
ESERCIZI DI SCIENZE TIPO ESAME a.s LEVE. Considera una leva di 1 genere lunga 50 cm, ad un estremo della quale viene applicata una
 ESERCIZI DI SCIENZE TIPO ESAME a.s. 2012-2013 LEVE Considera una leva di 1 genere lunga 50 cm, ad un estremo della quale viene applicata una resistenza di 10 kg distante 8 cm dal fulcro. a) Calcola il
ESERCIZI DI SCIENZE TIPO ESAME a.s. 2012-2013 LEVE Considera una leva di 1 genere lunga 50 cm, ad un estremo della quale viene applicata una resistenza di 10 kg distante 8 cm dal fulcro. a) Calcola il
MECCANICA APPLICATA. Esercizi di ALLE MACCHINE I POLITECNICO DI BARI. PhD Student: Ing. Ilario De Vincenzo
 POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
I PROVA IN ITINERE ( ) TESTO e TRACCIA di SOLUZIONE. u = ultima cifra del numero di Matricola
 TESTO e TRACCIA di SOLUZIONE. u = ultima cifra del numero di Matricola") Università degli Studi di ologna II Facoltà di Ingegneria con sede a Cesena MECCIC LICT LLE MCCHIE L Corso di Laurea in IGEGERI MECCIC Corso di Laurea in IGEGERI ERSZILE nno ccademico 008-009 I RV I ITIERE
Università degli Studi di ologna II Facoltà di Ingegneria con sede a Cesena MECCIC LICT LLE MCCHIE L Corso di Laurea in IGEGERI MECCIC Corso di Laurea in IGEGERI ERSZILE nno ccademico 008-009 I RV I ITIERE
Nome: Cognome: Data: 01/04/2017
 Esercizio N. 1 Valutazione 5 Un ala, lunga L = 25m, è modellata come una trave in alluminio (E = 72GPa, Iy=2e-4m 4 ) incastrata alla fusoliera in x=0m, come in figura. La sollecitazione che si vuole studiare
Esercizio N. 1 Valutazione 5 Un ala, lunga L = 25m, è modellata come una trave in alluminio (E = 72GPa, Iy=2e-4m 4 ) incastrata alla fusoliera in x=0m, come in figura. La sollecitazione che si vuole studiare
I Sistemi Lineari 10 Zanichelli Online Per La Scuola
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with i sistemi lineari 10
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with i sistemi lineari 10
Università degli Studi Roma Tre Dipartimento di Ingegneria Corso di Teoria e Progetto di Ponti A/A Prof. Ing.
 Analysis methods Simplified non-linear analysis: Simply supported Bridges Most of the bridges are built using a simply supported deck configuration. For the evaluation of the seismic behaviour of as-built
Analysis methods Simplified non-linear analysis: Simply supported Bridges Most of the bridges are built using a simply supported deck configuration. For the evaluation of the seismic behaviour of as-built
MODULO: Medie. Francesco Bologna Enrico Rogora. CASIO Università di Roma Luglio Avellino
 MODULO: Francesco Bologna Enrico CASIO Università di Roma 10-14 Luglio 2017 - Avellino (CASIO UniRoma) 10-14 Luglio 2017 1 / 25 A(x 1,..., x n ) = 1 n (x 1 + + x n ) Senza Calcolatrice Lanciare 12 volte
MODULO: Francesco Bologna Enrico CASIO Università di Roma 10-14 Luglio 2017 - Avellino (CASIO UniRoma) 10-14 Luglio 2017 1 / 25 A(x 1,..., x n ) = 1 n (x 1 + + x n ) Senza Calcolatrice Lanciare 12 volte
Inoltre si consiglia di svolgere i seguenti esercizi:
 I.I.S.S. MARIE CURIE Savignano sul Rubicone Esercizi di FISICA per la classe 1 DT A.S. 2017-2018 Prof. Alberto Pasini Si consiglia di riguardare tutti gli esercizi svolti in classe e assegnati come compito
I.I.S.S. MARIE CURIE Savignano sul Rubicone Esercizi di FISICA per la classe 1 DT A.S. 2017-2018 Prof. Alberto Pasini Si consiglia di riguardare tutti gli esercizi svolti in classe e assegnati come compito
Un cilindro di massa M=2 kg può ruotare senza attriti intorno al proprio asse centrale Z passante
 Momento torcente TU4Ftesto.doc Z Un cilindro di massa M=2 kg può ruotare senza attriti intorno al proprio asse centrale Z passante per O. L asse Z è orientato verso sinistra come in figura. Nel piano della
Momento torcente TU4Ftesto.doc Z Un cilindro di massa M=2 kg può ruotare senza attriti intorno al proprio asse centrale Z passante per O. L asse Z è orientato verso sinistra come in figura. Nel piano della
Le grandezze vettoriali e le Forze
 Fisica: lezioni e problemi Le grandezze vettoriali e le Forze 1. Gli spostamenti e i vettori 2. La scomposizione di un vettore 3. Le forze 4. Gli allungamenti elastici 5. Le operazioni sulle forze 6. Le
Fisica: lezioni e problemi Le grandezze vettoriali e le Forze 1. Gli spostamenti e i vettori 2. La scomposizione di un vettore 3. Le forze 4. Gli allungamenti elastici 5. Le operazioni sulle forze 6. Le
Nello schema seguente sono riportate le forze che agiscono sul sistema:
 CORPI COLLEGATI 1) Due blocchi sono collegati tra di loro come in figura. La massa di m1 è 4,0 kg e quella di m è di 1,8 kg. Il coefficiente di attrito dinamico tra m1 e il tavolo è μ d = 0,. Determinare
CORPI COLLEGATI 1) Due blocchi sono collegati tra di loro come in figura. La massa di m1 è 4,0 kg e quella di m è di 1,8 kg. Il coefficiente di attrito dinamico tra m1 e il tavolo è μ d = 0,. Determinare
PERCORSO DIDATTICO : FORZE, EQUILIBRIO, MACCHINE SEMPLICI
 PERCORSO DIDATTICO : FORZE, EQUILIBRIO, MACCHINE SEMPLICI PREREQUISITI parte 1 forze ed equilibrio statico essere capaci di riferire su osservazioni e di riferire con descrizioni. Saper operare nel piano
PERCORSO DIDATTICO : FORZE, EQUILIBRIO, MACCHINE SEMPLICI PREREQUISITI parte 1 forze ed equilibrio statico essere capaci di riferire su osservazioni e di riferire con descrizioni. Saper operare nel piano
Compito di Fisica I A geometri 18/12/2008
 1.Una trave lunga 120 cm appoggia su di un fulcro posto a 40 cm da un suo estremo sul quale agisce una forza resistente del peso di 300 N. Quale forza deve essere applicata all altro estremo per equilibrare
1.Una trave lunga 120 cm appoggia su di un fulcro posto a 40 cm da un suo estremo sul quale agisce una forza resistente del peso di 300 N. Quale forza deve essere applicata all altro estremo per equilibrare
Meccanica: branca della fisica, studio del movimento. Biomeccanica: studio del movimento animale. Padre storico: G. A. Borelli, autore del De Motu
 Meccanica: branca della fisica, studio del movimento. Biomeccanica: studio del movimento animale. Padre storico: G. A. Borelli, autore del De Motu Animalium, forse il primo trattato di Biomeccanica. Questo
Meccanica: branca della fisica, studio del movimento. Biomeccanica: studio del movimento animale. Padre storico: G. A. Borelli, autore del De Motu Animalium, forse il primo trattato di Biomeccanica. Questo
Geometria BAER I canale Foglio esercizi 3
 Geometria BAER I canale Foglio esercizi 3 Esercizio. Discutere le soluzioni del seguente sistema lineare nelle incognite,, z al variare del parametro k. 3 + kz = k k + 3z = k k + z = Soluzione: Il determinante
Geometria BAER I canale Foglio esercizi 3 Esercizio. Discutere le soluzioni del seguente sistema lineare nelle incognite,, z al variare del parametro k. 3 + kz = k k + 3z = k k + z = Soluzione: Il determinante
Costruzione degli inbook: 3 diverse strategie. a cura di Antonio Bianchi
 Costruzione degli inbook: 3 diverse strategie a cura di Antonio Bianchi Costruzione inbook: 3 diverse strategie 1 Symwriter PDF Symwriter => PDF => LibreOffice Draw 2 Symhelper Symwriter => PDF => LibreOffice
Costruzione degli inbook: 3 diverse strategie a cura di Antonio Bianchi Costruzione inbook: 3 diverse strategie 1 Symwriter PDF Symwriter => PDF => LibreOffice Draw 2 Symhelper Symwriter => PDF => LibreOffice
Esercizi aprile Sommario Conservazione dell energia e urti a due corpi.
 Esercizi 2.04.8 3 aprile 208 Sommario Conservazione dell energia e urti a due corpi. Conservazione dell energia. Esercizio Il motore di un ascensore solleva con velocità costante la cabina contenente quattro
Esercizi 2.04.8 3 aprile 208 Sommario Conservazione dell energia e urti a due corpi. Conservazione dell energia. Esercizio Il motore di un ascensore solleva con velocità costante la cabina contenente quattro
Fisica Generale I (primo e secondo modulo) A.A , 14 Gennaio 2010
 A.A , 14 Gennaio 2010") Fisica Generale I (primo e secondo modulo) A.A. 2009-10, 14 Gennaio 2010 Esercizi di meccanica relativi al primo modulo del corso di Fisica Generale I, anche equivalente ai corsi di Fisica Generale 1 e
Fisica Generale I (primo e secondo modulo) A.A. 2009-10, 14 Gennaio 2010 Esercizi di meccanica relativi al primo modulo del corso di Fisica Generale I, anche equivalente ai corsi di Fisica Generale 1 e
College Algebra. Logarithms: Denitions and Domains. Dr. Nguyen November 9, Department of Mathematics UK
 College Algebra Logarithms: Denitions and Domains Dr. Nguyen nicholas.nguyen@uky.edu Department of Mathematics UK November 9, 2018 Agenda Logarithms and exponents Domains of logarithm functions Operations
College Algebra Logarithms: Denitions and Domains Dr. Nguyen nicholas.nguyen@uky.edu Department of Mathematics UK November 9, 2018 Agenda Logarithms and exponents Domains of logarithm functions Operations
L Unità didattica in breve
 L Unità didattica in breve Una macchina semplice è un dispositivo utilizzato per equilibrare o vincere una forza resistente (resistenza) mediante una forza motrice (po tenza) avente caratteristiche diverse.
L Unità didattica in breve Una macchina semplice è un dispositivo utilizzato per equilibrare o vincere una forza resistente (resistenza) mediante una forza motrice (po tenza) avente caratteristiche diverse.
1. Siano A e B due punti di un atto di moto rigido piano. Dire quale delle seguenti affermazioni è errata:
 Università del Salento Facoltà di Ingegneria Corsi di Laurea in Ingegneria Industriale e Civile Prova scritta di Meccanica Razionale 20 giugno 2016 Soluzioni Parte 1: Domande a risposta multipla. 1. Siano
Università del Salento Facoltà di Ingegneria Corsi di Laurea in Ingegneria Industriale e Civile Prova scritta di Meccanica Razionale 20 giugno 2016 Soluzioni Parte 1: Domande a risposta multipla. 1. Siano
Statica del corpo rigido. Condizioni di equilibrio. Calcolo delle Reazioni Vincolari
 Statica del corpo rigido Condizioni di equilibrio Calcolo delle Reazioni incolari Obiettivo della lezione: apprendere le equazioni cardinali della statica e applicarle al calcolo delle reazioni vincolari.
Statica del corpo rigido Condizioni di equilibrio Calcolo delle Reazioni incolari Obiettivo della lezione: apprendere le equazioni cardinali della statica e applicarle al calcolo delle reazioni vincolari.
/ PA887/ sostituita dalla nuova / PA1083/ / PA887/ replaced by new / PA1083/
 24-0887/ PA887/ 10887 sostituita dalla nuova 24-1083/ PA1083/ 101083 24-0887/ PA887/ 10887 replaced by new 24-1083/ PA1083/ 101083 24-0887/ PA887/ 10887 Adattabile OES/ Suitable for OES Fiat/Lancia/Opel/Suzuki:
24-0887/ PA887/ 10887 sostituita dalla nuova 24-1083/ PA1083/ 101083 24-0887/ PA887/ 10887 replaced by new 24-1083/ PA1083/ 101083 24-0887/ PA887/ 10887 Adattabile OES/ Suitable for OES Fiat/Lancia/Opel/Suzuki:
Applicazione 2: Il partitore di corrente
 pplicazione : l partitore di corrente Determinare la corrente che scorre in Si risolve direttamente: t t E un circuito utilissimo, perche permette, partendo da una corrente, di ottenerne un altra di un
pplicazione : l partitore di corrente Determinare la corrente che scorre in Si risolve direttamente: t t E un circuito utilissimo, perche permette, partendo da una corrente, di ottenerne un altra di un
VETTORE o SCALARE. definita come
 FORZA La forza applicata ad un corpo causa una accelerazione di quel corpo di una grandezza proporzionale alla forza nella direzione della forza ed inversamente proporzionale alla massa del corpo. F =
FORZA La forza applicata ad un corpo causa una accelerazione di quel corpo di una grandezza proporzionale alla forza nella direzione della forza ed inversamente proporzionale alla massa del corpo. F =
Che cos è una forza? 2ª lezione (21 ottobre 2006): Idea intuitiva: forza legata al concetto di sforzo muscolare.
: Idea intuitiva: forza legata al concetto di sforzo muscolare.") 2ª lezione (21 ottobre 2006): Che cos è una forza? Idea intuitiva: forza legata al concetto di sforzo muscolare. L idea intuitiva è corretta, ma limitata ; le forze non sono esercitate solo dai muscoli!
2ª lezione (21 ottobre 2006): Che cos è una forza? Idea intuitiva: forza legata al concetto di sforzo muscolare. L idea intuitiva è corretta, ma limitata ; le forze non sono esercitate solo dai muscoli!
Dinamica: Forze e Moto, Leggi di Newton
 Dinamica: Forze e Moto, Leggi di Newton La Dinamica studia il moto dei corpi in relazione il moto con le sue cause: perché e come gli oggetti si muovono. La causa del moto è individuata nella presenza
Dinamica: Forze e Moto, Leggi di Newton La Dinamica studia il moto dei corpi in relazione il moto con le sue cause: perché e come gli oggetti si muovono. La causa del moto è individuata nella presenza
COME AGISCE LA FORZA?
 LE FORZE LA FORZA E OGNI COSA CHE PUO MODIFICARE LO STATO DI QUIETE O DI MOTO DI UN CORPO E L ACCELERAZIONE E CIO CHE MISURA E DESCRIVE TALE CAMBIAMENTO. COME AGISCE LA FORZA? UNA FORZA PUO CAMBIARE LA
LE FORZE LA FORZA E OGNI COSA CHE PUO MODIFICARE LO STATO DI QUIETE O DI MOTO DI UN CORPO E L ACCELERAZIONE E CIO CHE MISURA E DESCRIVE TALE CAMBIAMENTO. COME AGISCE LA FORZA? UNA FORZA PUO CAMBIARE LA
LAVORO, POTENZA ED ENERGIA
 LAVORO, POTENZA ED ENERGIA Giuseppe Frangiamore con la collaborazione di Leonardo Zaffuto Solitamente si dice di compiere un lavoro ogni volta che si esegue un attività di tipo fisico o mentale. Quando
LAVORO, POTENZA ED ENERGIA Giuseppe Frangiamore con la collaborazione di Leonardo Zaffuto Solitamente si dice di compiere un lavoro ogni volta che si esegue un attività di tipo fisico o mentale. Quando
Appendice A. Conduttori elettrici, sezioni e diametri Appendix A. Wires, Sizes and AWG diameters
 Appendice A. Conduttori elettrici, sezioni e diametri Appendix A. Wires, Sizes and AWG diameters A.1 Misura dei conduttori elettrici, sezioni e diametri AWG and kcmil wires sizes measurement L America
Appendice A. Conduttori elettrici, sezioni e diametri Appendix A. Wires, Sizes and AWG diameters A.1 Misura dei conduttori elettrici, sezioni e diametri AWG and kcmil wires sizes measurement L America
1 Sistemi di riferimento
 Università di Bologna - Corsi di Laurea Triennale in Ingegneria, II Facoltà - Cesena Esercitazioni del corso di Fisica Generale L-A Anno accademico 2006-2007 1 Sistemi di riferimento Le grandezze usate
Università di Bologna - Corsi di Laurea Triennale in Ingegneria, II Facoltà - Cesena Esercitazioni del corso di Fisica Generale L-A Anno accademico 2006-2007 1 Sistemi di riferimento Le grandezze usate
Ricordiamo. 1. Tra le equazioni delle seguenti rette individua e disegna quelle parallele all asse delle ascisse:
 La retta Retta e le sue equazioni Equazioni di rette come luogo geometrico y = h h R equazione di una retta parallela all asse delle ascisse x = 0 equazione dell asse delle ordinate y = h h R equazione
La retta Retta e le sue equazioni Equazioni di rette come luogo geometrico y = h h R equazione di una retta parallela all asse delle ascisse x = 0 equazione dell asse delle ordinate y = h h R equazione
Vibrazioni Meccaniche
 Vibrazioni Meccaniche A.A. 2-22 Esempi di scrittura dell equazione di moto per sistemi a 2 gdl Turbina Una turbina pone in rotazione un generatore elettrico per mezzo della trasmissione schematizzata in
Vibrazioni Meccaniche A.A. 2-22 Esempi di scrittura dell equazione di moto per sistemi a 2 gdl Turbina Una turbina pone in rotazione un generatore elettrico per mezzo della trasmissione schematizzata in