IL SISTEMA OTTICO. È un dispositivo in grado di convogliare sul sensore della telecamera i raggi luminosi riflessi dalla zona inquadrata
|
|
|
- Leonzia Grassi
- 5 anni fa
- Visualizzazioni
Transcript
1 IL SISTEMA OTTICO Telecamera È il dispositivo in grado di acquisire un immagine della zona inquadrata Ottica (Obiettivo o lente) È un dispositivo in grado di convogliare sul sensore della telecamera i raggi luminosi riflessi dalla zona inquadrata Sorgente luminosa È l emettitore di luce utilizzato per illuminare la zona inquadrata Sistema di elaborazione delle immagini È l insieme di hardware e software utilizzato per l elaborazione dell immagine.
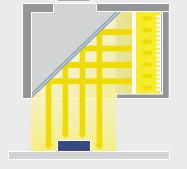
2 IL SISTEMA OTTICO Asse ottico (asse Z) Telecamera Ottica Misurando illuminatore Canale di comunicazione Frame grabber Piano di appoggio PC L oggetto è posizionato su un piano di appoggio (vetro) o posizionato in qualche modo nella zona inquadrata dalla telecamera L illuminatore diascopico proietta l ombra dell oggetto sul sensore della telecamera L illuminatore episcopico genera una riflessione di luce sull oggetto che viene proiettata sul sensore della telecamera L ottica permette di convogliare i fasci luminosi verso il sensore della telecamera Il canale di comunicazione permette di trasferire l immagine acquisita al sistema di elaborazione tramite una scheda di acquisizione immagini (Frame-Grabber): CameraLink GigE USB3 Il software elabora le immagini per determinare le misure dell oggetto


3 LE telecamere Il principio alla base è quello della camera oscura (dark room) e del pin-hole La camera oscura è un ambiente privo di sorgenti di luce Il pin-hole è l unica fessura da cui possono entrare raggi di luce L oggetto posto di fronte la pin-hole sarà proiettato sulla parete opposta della camera oscura


: la conversion dellla quantità di carica viene effettuata")
4 LE telecamere Analogiche / Digitali : si differenziano solo nel tipo di segnale che viene trasferito dalla telecamera al framgrabber. Oggi si utilizzano quasi esclusivamente telecamere digitali Matriciali / Lineari : si differenziano per la forma del sensore Matriciali : il sensore è composto da una griglia NxM di celle fotosensibili Lineari : il sensore è compost da una sola riga di celle fotosensibili (esistono anche sensori multilinea x2 x4 x16) B/N Colori : si differenziano per il tipo di sensore utilizzato B/N : Il segnale generato da ogni singola cella è direttamente proporzionale alla quantità di luce che incide sulla cella stessa Colori : Il filtro Bayer permette di combinare la sensibilità del sensore con le lunghezze d onda dei colori RGB CCD CMOS CCD (Charge Coupled Device): la quantità di radiazione elettromagnetica viene immagazzinata dal sensore fotosensibile e trasferita per la successiva conversione A/D esterno al sensore CMOS (Complementary Metal Oxide Semiconduct): la conversion dellla quantità di carica viene effettuata direttamente all interno del sensore. Ogni singolo sensore ha il proprio ADC.
5 LE telecamere Risoluzione (MegaPixel): definisce il numero di pixel che compongono il sensore Cell size : definisce la dimensione (in micron) di ogni singola cella (pixle) che compone l intero sensore Rolling shutter/global shutter: definisce il modo con cui viene salvata l informazione di carica sul sensore Global shutter: in un unico istante viene memorizzata l informazione su tutta la matrice Rolling shutter: una riga alla volta (critico per acquisizioni in movimento) Frame per seconds: è la velocità di campionamento massimo della telecamera in termini si scatti al secondo Data rate: è la velocità massima di trasmissione dei dati dalla telecamera al framegrabber in termini di bit/sec Luminosità/sensibilità: è la risposta alla luce in funzione della lunghezza d onda Tipo di connessione: è lo standard utilizzato per la connessione tra telecamere e framegrabber Sensore 6x4 celle = 24pixel 1 cella -> 1 pixel 1pixel -> 1 byte (8bit) DN = 0 (nero) DN = 255 (bianco)

6 LE telecamere Campionamento: ogni cella photosensibile genera immagazzina una quantità di carica pari alla quantità di radiazione luminosa ricevuta Quantizzazione: i valori di carica di ogni singola cella sono convertiti in forma digitale (8bit DN 0-255)


7 LE OTTICHE Le ottiche permettono di convogliare i raggi luminosi provenienti dalla scena inquadrata verso il sensore Sono composte da una o più lenti a seconda della complessità dell ottica Le leggi dell ottica geometrica descrivono il funzionamento delle ottiche
8 LE LENTI SOTTILI Il modello delle lenti sottili (valido quando lo spessore della lente è considerevolmente inferiore alla curvatura della lente stessa) descrive il principio di funzionamento delle ottiche Raggi paralleli all asse ottico sono deflessi passando per il punto F Raggi passanti per il punto C viaggiano rettilinei 1 ν + 1 u = 1 f P : punto della scena p : il corrispondente punto focalizzato sull imagine u : distanza tra il punto P e la lente v : distanza tra il punto p e la lente f : lunghezza focale (parametron della lente) C : centro della lente F : punto focale della lente Blur Circle o cerchio di confusione È la causa della sfocatura dell immagine La focalizzazione dell immagine avviene cambiando le posizioni relative tra sensore-lente-oggetto
: range di working distance entro cui l oggetto si può considerare a fuoco Resolution: distanza minima")
9 LE OTTICHE Field Of View (FoV) : è l area inquadrata dalla lente e riportata sul sensore della telecamera Magnification: rapporto tra dimensione del sensore ed area inquadrata Working Distance (WD) : è la distanza tra la lente e l oggetto inquadrato nel punto di miglior fuoco Depth of Field (DoF): range di working distance entro cui l oggetto si può considerare a fuoco Resolution: distanza minima tra due punti che possono essere identificati chiaramente come punti separati nell immagine ottenuta: dipende dalla qualità della lente e dalla risoluzione della telecamera Focale: è la distanza tra la lente ed il punto in cui si trova il diaframma Diaframma: è il punto in cui i fasci luminosi convergono tra lente e sensore: F-number (F/#): è il rapporto tra la focale e l effettiva apertura del diaframma (diametro): F/# = (f/d)





10 LE OTTICHE Aberrazione sferica: i raggi non riescono a focalizzare correttamente Aberrazione cromatica: i raggi focalizzano in posizioni differenti a seconda della lunghezza d onda Astigmatismo: la lente ha focali differenti per raggi che risiedono su due piani ortogonali tra loro Coma: raggi paralleli entranti nell ottica focalizzano in posizioni differenti a seconda della loro distanza dall asse ottico Curvatura di campo: raggi paralleli incidenti con angoli differenti focalizzano non focalizzano su un piano, ma su una superficie curva Distorsione: è la deformazione generata dalle lenti dovuta alla magnificazione

11 LE OTTICHE telecentriche Le ottiche telecentriche sono una tipologia di ottiche progettate per ricevere solo raggi di luce collimati e paralleli all asse ottico La lente di ingresso ha dimensione pari al Field of View La magnificazione è indipendente dalla distanza tra oggetto e lente La distorsione è minima Riduzione quasi totale degli errori prospettici
12 SORGENTI LUMINOSE L illuminazione è uno dei componenti fondamentali per un sistema di visione. Una scelta appropriata dell illuminatore da utilizzare per una specifica applicazione assicura una buona performance del sistema stesso. I sensori delle telecamere sono sensibili ai raggi di luce generati dall illuminatore e riflessi dall oggetto. L informazione generata dall interazione tra illuminatore ed oggetto è una informazione «primaria». Non esiste software in grado di rilevare feature su una immagine se queste non sono correttamente illuminate. Anche l ambiente è una sorgente luminosa in continua evoluzione La sorgente luminosa deve essere individuata in funzione delle condizioni di lavoro del sistema: Tipo di applicazione Finitura superficiale dell oggetto Ingombro e costo dell illuminatore Condizioni ambientali Cosa è necessario tenere a mente: Massimizzare il contrasto della feature che si vuole individuare Minimizzare il contrasto della feature di NON interesse L influenza delle condizioni ambientali Le differenza di finitura superficiale degli oggetti
 : coassiale Episcopica (front-light) : diffusa Episcopica (front-light) : direzionale Tipi di")
13 SORGENTI LUMINOSE LED (Light Emitting Diode): è il tipo di illuminatore più utilizzato nel mondo della Machine Vision Risposta rapida Resistenza meccanica elevata Geometrie di illuminazione facili da realizzare Stabilità nel tempo Tempo di vita elevato Tipi di illuminazione Episcopica (front-light) : coassiale Episcopica (front-light) : diffusa Episcopica (front-light) : direzionale Tipi di illuminazione Diascopica (back-light) : telecentrica Diascopica (back-light) : non collimata

 : non")
 :")
14 SORGENTI LUMINOSE Tipi di illuminazione Diascopica (back-light) : telecentrica Diascopica (back-light) : non collimata Tipi di illuminazione Episcopica (front-light) : coassiale Episcopica (front-light) : diffusa Episcopica (front-light) : direzionale
15 L elaborazione Il risultato di un sistema di visione è ottenuto dall elaborazione dell immagine acquisita dal sistema ottico Gli algoritmi di Computer Vision permettono la determinazione di features all interno dell immagine Filtering : alterazione dell immagine tramite operazioni matematici che lavorano sulla matrici di pixel (Media e Gauss Riduzione del rumore ) Blob Analysis : suddivisione dell immagine in aree equivalenti in termini di «colore» o tono di grigio (Ricerca difetti) Edge Detection : identificazione dei punti di contorno degli oggetti all interno dell immagine (Ricerca bordo) Object Recongnition (Pattern Matching) : identificazione di oggetti predefiniti all interno dell immagine (Presenza componenti o Guida robot) Automatic Feature Detection : identificazione automatica di forme all interno dell immagine (Programmazione automatica)
 è il parametro che permette di definire la presenza di un profilo (edge).")

16 L elaborazione L edge detection è l algoritmo di CV che è alla base della metrologia ottica Il contrasto di DN (Digital Number) è il parametro che permette di definire la presenza di un profilo (edge). È pssibile estrarre tutti i punti descrittivi di un profilo dell oggetto La dimensione di un oggetto è calcolata come la distanza tra due bordi DN Derivata
17 L elaborazione Gli algoritmi di calcolo metrologico ricevono in input i punti rilevati dagli algoritmi di Edge Detection e forniscono in uscita il valore della misura La misura ottica deve avere una corrispondenza alla misura a contatto. È necessario identificare l algoritmo corretto. La misura su un immagine è sempre in pixel e deve essere convertita in mm tramite la calibrazione del sistema ottico
Telecamere per la vision artificiale. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Telecamere per la vision artificiale Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Immagini monocromatiche Ogni cella corrisponde ad un bit. Y Row 1 1 1 1 q X 0: nero 1: bianco
Telecamere per la vision artificiale Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Immagini monocromatiche Ogni cella corrisponde ad un bit. Y Row 1 1 1 1 q X 0: nero 1: bianco
Pixel MM. Definisce la corrispondenza tra le coordinate pixel e le coordinate mm
 Taratura Vs calibration Taratura È il processo di verifica del corretto funzionamento di uno strumento di misura Determina gli errori dello strumento (o il valore di un campione) Il procedimento è guidato
Taratura Vs calibration Taratura È il processo di verifica del corretto funzionamento di uno strumento di misura Determina gli errori dello strumento (o il valore di un campione) Il procedimento è guidato
D2.4 SISTEMA DI VISIONE E CALIBRAZIONE CELLA
 MM&A Micro Manipulation and Assembly D2.4 SISTEMA DI VISIONE E CALIBRAZIONE CELLA Gruppo ITIA Documento interno MM&A-PRIN2009-0003 Progetto PRIN2009 Coordinatore scientifico Prof. Giovanni Legnani Serena
MM&A Micro Manipulation and Assembly D2.4 SISTEMA DI VISIONE E CALIBRAZIONE CELLA Gruppo ITIA Documento interno MM&A-PRIN2009-0003 Progetto PRIN2009 Coordinatore scientifico Prof. Giovanni Legnani Serena
Sistemi di Visione Industriale
 Sistemi di Visione Industriale Esistono molte definizioni per nominare i sistemi che utilizzano algoritmi di «Imaging» in ambito industriale Visione Industriale - Machine Vision Smart Sensor ecc. ma tutte
Sistemi di Visione Industriale Esistono molte definizioni per nominare i sistemi che utilizzano algoritmi di «Imaging» in ambito industriale Visione Industriale - Machine Vision Smart Sensor ecc. ma tutte
Corso di Visione Artificiale. Camera. Samuel Rota Bulò
 Corso di Visione Artificiale Camera Samuel Rota Bulò Prima fotografia Era noto sin dal medioevo che certi sali di argento si oscurano velocemente sotto la luce del sole. Nel 1826 Niepce ottenne la prima
Corso di Visione Artificiale Camera Samuel Rota Bulò Prima fotografia Era noto sin dal medioevo che certi sali di argento si oscurano velocemente sotto la luce del sole. Nel 1826 Niepce ottenne la prima
METROLOGIA OTTICA. Ing. Stefano Andreini VICI&C S.p.A.
 METROLOGIA OTTICA Ing. Stefano Andreini VICI&C S.p.A. stefano.andreini@vici.it DEFINIZIONI Metrologia La metrologia (dal greco metron+logos, - scienza della misura), è la scienza che studia il linguaggio
METROLOGIA OTTICA Ing. Stefano Andreini VICI&C S.p.A. stefano.andreini@vici.it DEFINIZIONI Metrologia La metrologia (dal greco metron+logos, - scienza della misura), è la scienza che studia il linguaggio
Sistemi di Visione Industriale
 Sistemi di Visione Industriale Esistono molte definizioni per nominare i sistemi che utilizzano algoritmi di «Imaging» in ambito industriale Visione Industriale - Machine Vision Smart Sensor ecc. ma tutte
Sistemi di Visione Industriale Esistono molte definizioni per nominare i sistemi che utilizzano algoritmi di «Imaging» in ambito industriale Visione Industriale - Machine Vision Smart Sensor ecc. ma tutte
Ottica Geometrica. Si dividono solitamente in
 aberrazioni Ottica Geometrica Le aberrazioni ottiche sono delle deformazioni o imprecisioni nella formazione delle immagini, dovute alla geometria delle lenti ed al comportamento della luce. Si dividono
aberrazioni Ottica Geometrica Le aberrazioni ottiche sono delle deformazioni o imprecisioni nella formazione delle immagini, dovute alla geometria delle lenti ed al comportamento della luce. Si dividono
3I - Impresa Ingegneria Italia s.r.l. Padriciano 99 - AREA Science Park Trieste
 INNOVATION. IMAGE-PROCESSING. VISION SYSTEMS. 3I - Impresa Ingegneria Italia s.r.l. Padriciano 99 - AREA Science Park - 34149 Trieste www.opto3i.com 2018 L AZIENDA Tecnologie innovative in campo industriale
INNOVATION. IMAGE-PROCESSING. VISION SYSTEMS. 3I - Impresa Ingegneria Italia s.r.l. Padriciano 99 - AREA Science Park - 34149 Trieste www.opto3i.com 2018 L AZIENDA Tecnologie innovative in campo industriale
Telescopi ed aberrazioni ottiche
 Centro Osservazione e Divulgazione Astronomica Siracusa Emanuele Schembri Telescopi ed aberrazioni ottiche Siracusa,, 30 aprile 2010 Definizione Le aberrazioni ottiche sono difetti apparenti del comportamento
Centro Osservazione e Divulgazione Astronomica Siracusa Emanuele Schembri Telescopi ed aberrazioni ottiche Siracusa,, 30 aprile 2010 Definizione Le aberrazioni ottiche sono difetti apparenti del comportamento
Tav.8_1. Grandezze radiometriche spettrali.
 Tav.8_1. Grandezze radiometriche spettrali. Componenti di segnale a differente lunghezza d onda Superficie di riferimento Segnale Φ TOT Ad ogni componente di onda piana di lunghezza d onda λ è associata
Tav.8_1. Grandezze radiometriche spettrali. Componenti di segnale a differente lunghezza d onda Superficie di riferimento Segnale Φ TOT Ad ogni componente di onda piana di lunghezza d onda λ è associata
AL DI LA DELLE IMMAGINI
 AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
Dispositivi di ingresso. La tastiera. Dispositivi di puntamento. Dispositivi di puntamento
 Dispositivi di ingresso I dispositivi di input ricevono dati dall esterno Traducono i dati in un formato consono al calcolatore Esempi: Dispositivi di puntamento Tastiera Microfono Scanner La tastiera
Dispositivi di ingresso I dispositivi di input ricevono dati dall esterno Traducono i dati in un formato consono al calcolatore Esempi: Dispositivi di puntamento Tastiera Microfono Scanner La tastiera
Lezioni di illuminotecnica. Fenomeni ottici fondamentali
 7 Lezioni di illuminotecnica Fenomeni ottici fondamentali Interazione luce-materiali Consideriamo una lastra di materiale immersa in aria. Quando la radiazione lin viaggio nell aria incontra l interfaccia
7 Lezioni di illuminotecnica Fenomeni ottici fondamentali Interazione luce-materiali Consideriamo una lastra di materiale immersa in aria. Quando la radiazione lin viaggio nell aria incontra l interfaccia
Misure di fenomeni di aberrazione di una lente
 Padova, gennaio 00 Misure di fenomeni di aberrazione di una lente Indicare il numero identificativo e le caratteristiche geometriche della lente utilizzata: Lente num. =... Spessore =... Spigolo =... Indice
Padova, gennaio 00 Misure di fenomeni di aberrazione di una lente Indicare il numero identificativo e le caratteristiche geometriche della lente utilizzata: Lente num. =... Spessore =... Spigolo =... Indice
ESERCIZI DI OTTICA GEOMETRICA
 ESERCIZI DI OTTICA GEOMETRICA Prima di ogni argomento sono raccolte alcune formule utili, e non banali, per lo svolgimento degli esercizi. Si presuppongono lo studio e la comprensione teorica delle stesse.
ESERCIZI DI OTTICA GEOMETRICA Prima di ogni argomento sono raccolte alcune formule utili, e non banali, per lo svolgimento degli esercizi. Si presuppongono lo studio e la comprensione teorica delle stesse.
LENTI SOTTILI. Le lenti sottili sono gli strumenti ottici più importanti tra quelli più semplici.
 LENTI SOTTILI Chiamiamo lente un qualsiasi corpo trasparente limitato da due superfici curve o da una superficie piana ed una curva, in grado di trasmettere un fascio di luce focalizzandolo in modo da
LENTI SOTTILI Chiamiamo lente un qualsiasi corpo trasparente limitato da due superfici curve o da una superficie piana ed una curva, in grado di trasmettere un fascio di luce focalizzandolo in modo da
Ottica geometrica. Propagazione per raggi luminosi (pennello di luce molto sottile)
") Ottica geometrica Propagazione per raggi luminosi (pennello di luce molto sottile) All interno di un mezzo omogeneo la propagazione e rettilinea: i raggi luminosi sono pertanto rappresentati da tratti
Ottica geometrica Propagazione per raggi luminosi (pennello di luce molto sottile) All interno di un mezzo omogeneo la propagazione e rettilinea: i raggi luminosi sono pertanto rappresentati da tratti
OPTOScan. Profilometro Laser. Sistema Laser di scansione 2D / 3D per metrologia dimensionale con software per acquisizione dati e analisi metrologica.
 OPTOScan Profilometro Laser Sistema Laser di scansione 2D / 3D per metrologia dimensionale con software per acquisizione dati e analisi metrologica. OPTOScan Profilometro Laser Brochure 2018 Applicazioni
OPTOScan Profilometro Laser Sistema Laser di scansione 2D / 3D per metrologia dimensionale con software per acquisizione dati e analisi metrologica. OPTOScan Profilometro Laser Brochure 2018 Applicazioni
Esercizi di Ottica. Università di Cagliari Laurea Triennale in Biologia Corso di Fisica
 Università di Cagliari Laurea Triennale in Biologia Corso di Fisica Esercizi di Ottica 1. Un fascio di luce di lunghezza λ passa attraverso una fenditura rettangolare di larghezza a. La sua immagine viene
Università di Cagliari Laurea Triennale in Biologia Corso di Fisica Esercizi di Ottica 1. Un fascio di luce di lunghezza λ passa attraverso una fenditura rettangolare di larghezza a. La sua immagine viene
FRAMOS Italia. OverView tecnologia CMOS Sensor
 FRAMOS Italia OverView tecnologia CMOS Sensor Agenda Framos come partner tecnologico Definizione Image Processing Overview tecnologie CCD e CMOS Due tecnologie a confronto 28.06.2012 FRAMOS Italy Storia
FRAMOS Italia OverView tecnologia CMOS Sensor Agenda Framos come partner tecnologico Definizione Image Processing Overview tecnologie CCD e CMOS Due tecnologie a confronto 28.06.2012 FRAMOS Italy Storia
Fiora Pirri. Lezione. Lunedi giovedi venerdi Fiora Pirri. Corso Visione e Percezione. Visione e Percezione 1
 Corso Introduzione, acquisizione e modello della camera Lezioni Lunedi giovedi venerdi 12.00-13.30 15.45-19.00 A3 A3 Lezione Lezione+ Lab 1 Sito, Orari, Ricevimento Il sito del corso è http://www.dis.uniroma1.it/~visiope
Corso Introduzione, acquisizione e modello della camera Lezioni Lunedi giovedi venerdi 12.00-13.30 15.45-19.00 A3 A3 Lezione Lezione+ Lab 1 Sito, Orari, Ricevimento Il sito del corso è http://www.dis.uniroma1.it/~visiope
Ottica fisiologica, ovvero perché funzionano i Google Glass (parte 2)
") Ottica fisiologica, ovvero perché funzionano i Google Glass (parte 2) Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it
Ottica fisiologica, ovvero perché funzionano i Google Glass (parte 2) Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it
Fisica II - CdL Chimica. Formazione immagini Superfici rifrangenti Lenti sottili Strumenti ottici
 Formazione immagini Superfici rifrangenti Lenti sottili Strumenti ottici Ottica geometrica In ottica geometrica si analizza la formazione di immagini assumendo che la luce si propaghi in modo rettilineo
Formazione immagini Superfici rifrangenti Lenti sottili Strumenti ottici Ottica geometrica In ottica geometrica si analizza la formazione di immagini assumendo che la luce si propaghi in modo rettilineo
/// RDE COMPANY SRL. SAVE 2007 Fiera di Verona 23 Ottobre 2007. Ing. Gabriele Bomba Ing. Michele Paolino
 Metodologia per il controllo di qualità nelle macchine automatiche attraverso l uso di tecnologie per la scansione laser tridimensionale. SAVE 2007 Fiera di Verona 23 Ottobre 2007 Ing. Gabriele Bomba Ing.
Metodologia per il controllo di qualità nelle macchine automatiche attraverso l uso di tecnologie per la scansione laser tridimensionale. SAVE 2007 Fiera di Verona 23 Ottobre 2007 Ing. Gabriele Bomba Ing.
L immagine. Meccanismi della visione umana Come si genera un immagine Caratteristiche dell acquisizione L immagine digitale
 L immagine Meccanismi della visione umana Come si genera un immagine Caratteristiche dell acquisizione L immagine digitale Da dove vengono le immagini? Il principale (e più familiare, in quanto legato
L immagine Meccanismi della visione umana Come si genera un immagine Caratteristiche dell acquisizione L immagine digitale Da dove vengono le immagini? Il principale (e più familiare, in quanto legato
CORSO DI FOTOGRAFIA DIGITALE LIVELLO AVANZATO
 CORSO DI FOTOGRAFIA DIGITALE LIVELLO AVANZATO Alessandro Tintori www.alessandrotintori.com photo@alessandrotintori.com 1 Unit 12 2 Il significato dei grafici Descrivono le performance ottiche di una lente.
CORSO DI FOTOGRAFIA DIGITALE LIVELLO AVANZATO Alessandro Tintori www.alessandrotintori.com photo@alessandrotintori.com 1 Unit 12 2 Il significato dei grafici Descrivono le performance ottiche di una lente.
Dispositivi a trasferimento di carica
 Dispositivi a trasferimento di carica CTD Charge Transfer Devices CCD Charge Coupled Devices Evoluzione tecnologica: 1967: array di fotodiodi/fototransistori MOS (pixel passivi) 1970: sensori CCD 1980:
Dispositivi a trasferimento di carica CTD Charge Transfer Devices CCD Charge Coupled Devices Evoluzione tecnologica: 1967: array di fotodiodi/fototransistori MOS (pixel passivi) 1970: sensori CCD 1980:
Giornata ANIPLA presso il SAVE. Sistemi di Visione Artificiale nei Processi Industriali. 24 ottobre 2012
 Giornata ANIPLA presso il SAVE Sistemi di Visione Artificiale nei Processi Industriali 24 ottobre 2012 Guida robot 3D... Un sistema di guida robot 3D determina posizioni e pose, a priori incognite, di
Giornata ANIPLA presso il SAVE Sistemi di Visione Artificiale nei Processi Industriali 24 ottobre 2012 Guida robot 3D... Un sistema di guida robot 3D determina posizioni e pose, a priori incognite, di
ERI S.r.l. Figura 1 Particolare di un allestimento iniziale di studio
 1. ATTIVITÀ 1 Titolo: Camera della pioggia Descrizione attività La prima fase è consistita nella progettazione e realizzazione della camera della pioggia. Sono stati sviluppati studi e calcoli teorici,
1. ATTIVITÀ 1 Titolo: Camera della pioggia Descrizione attività La prima fase è consistita nella progettazione e realizzazione della camera della pioggia. Sono stati sviluppati studi e calcoli teorici,
Spaccato di una reflex
 Spaccato di una reflex SENSORI DIGITALI E PELLICOLE Acquisizione mediante fotodiodo CCD o CMOS -Sensore digitale Acquisizione mediante Pellicola Sensore analogico Il sensore digitale Fotodiodo o Photodetector
Spaccato di una reflex SENSORI DIGITALI E PELLICOLE Acquisizione mediante fotodiodo CCD o CMOS -Sensore digitale Acquisizione mediante Pellicola Sensore analogico Il sensore digitale Fotodiodo o Photodetector
Il problema della pulizia
 Il problema della pulizia Un sistema di misura ottico è molto più sensibile allo sporco rispetto ad un sistema di misura a contatto: 1. Eventuali liquidi sulla superficie del pezzo fanno spessore Misura
Il problema della pulizia Un sistema di misura ottico è molto più sensibile allo sporco rispetto ad un sistema di misura a contatto: 1. Eventuali liquidi sulla superficie del pezzo fanno spessore Misura
Lezione 22 - Ottica geometrica
 Lezione 22 - Ottica geometrica E possibile, in certe condizioni particolari, prescindere dal carattere ondulatorio della radiazione luminosa e descrivere la propagazione della luce usando linee rette e
Lezione 22 - Ottica geometrica E possibile, in certe condizioni particolari, prescindere dal carattere ondulatorio della radiazione luminosa e descrivere la propagazione della luce usando linee rette e
Presentazione laboratorio e nozioni base meccaniche e elettroniche dei droni WP3 ACQUISIZIONE ED ELABORAZIONE DATI
 1 Presentazione laboratorio e nozioni base meccaniche e elettroniche dei droni WP3 ACQUISIZIONE ED ELABORAZIONE DATI Uso dei Droni nella ripresa video Elenco argomenti Concetti base sull'ottica, fotografia
1 Presentazione laboratorio e nozioni base meccaniche e elettroniche dei droni WP3 ACQUISIZIONE ED ELABORAZIONE DATI Uso dei Droni nella ripresa video Elenco argomenti Concetti base sull'ottica, fotografia
Fenomeni ottici fondamentali
 7 Interazione luce-materiali Lezioni di illuminotecnica Fenomeni ottici fondamentali Consideriamo una lastra di materiale immersa in aria. Quando la radiazione lin viaggio nell aria incontra l interfaccia
7 Interazione luce-materiali Lezioni di illuminotecnica Fenomeni ottici fondamentali Consideriamo una lastra di materiale immersa in aria. Quando la radiazione lin viaggio nell aria incontra l interfaccia
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
LE LENTI E L OCCHIO UMANO Prof. Erasmo Modica erasmo@galois.it
 LE LENTI E L OCCHIO UMANO Prof. Erasmo Modica erasmo@galois.it LE LENTI E LE LORO PROPRIETÀ Una lente è uno strumento costituito da un mezzo trasparente delimitato da due superfici curve, oppure da una
LE LENTI E L OCCHIO UMANO Prof. Erasmo Modica erasmo@galois.it LE LENTI E LE LORO PROPRIETÀ Una lente è uno strumento costituito da un mezzo trasparente delimitato da due superfici curve, oppure da una
DYNAMIC 3D VISION INSPECTION Alessandro Colombi area sales manager CamTec, wenglor sensoric Ing. Andrea Grilli, Sintec Ingegneria direttore tecnico
 DYNAMIC 3D VISION INSPECTION Alessandro Colombi area sales manager CamTec, wenglor sensoric Ing. Andrea Grilli, Sintec Ingegneria direttore tecnico Smart Vision - Le tecnologie per l industria del futuro
DYNAMIC 3D VISION INSPECTION Alessandro Colombi area sales manager CamTec, wenglor sensoric Ing. Andrea Grilli, Sintec Ingegneria direttore tecnico Smart Vision - Le tecnologie per l industria del futuro
Camera Tips n Tricks - come risolvere problemi complessi con le funzioni di base
 Camera Tips n Tricks - come risolvere problemi complessi con le funzioni di base Gianni Valenti, Responsabile sviluppo software - ALKERIA Smart Vision - Le tecnologie per l industria del futuro Per risolvere
Camera Tips n Tricks - come risolvere problemi complessi con le funzioni di base Gianni Valenti, Responsabile sviluppo software - ALKERIA Smart Vision - Le tecnologie per l industria del futuro Per risolvere
Corso di Telerilevamento Lezione 2
 Corso di Telerilevamento Lezione 2 Curve di riflettanza Immagini digitali e visualizzazione La riflessione La radiazione incidente su di una determinata superficie può essere assorbita, riflessa o trasmessa
Corso di Telerilevamento Lezione 2 Curve di riflettanza Immagini digitali e visualizzazione La riflessione La radiazione incidente su di una determinata superficie può essere assorbita, riflessa o trasmessa
Luci ed ombre Marcon Giorgio Alberto Siemens
 Luci ed ombre Marcon Giorgio Alberto Siemens Sottogruppo Sistemi di Visione Luci & ombre I componenti di un sistema Il controllore La Smart Camera Hub Ethernet Field bus converter? L immagine L'immagine
Luci ed ombre Marcon Giorgio Alberto Siemens Sottogruppo Sistemi di Visione Luci & ombre I componenti di un sistema Il controllore La Smart Camera Hub Ethernet Field bus converter? L immagine L'immagine
Corso di Laurea in Astronomia. Laurea Triennale DISPENSE DI ESPERIMENTAZIONI DI FISICA 2
 Corso di Laurea in Astronomia Laurea Triennale DISPENSE DI ESPERIMENTAZIONI DI FISICA A.A. 01-013 Indice 1 Introduzione 5 1.1 Indice di rifrazione.............................. 5 1. Riflessione e rifrazione............................
Corso di Laurea in Astronomia Laurea Triennale DISPENSE DI ESPERIMENTAZIONI DI FISICA A.A. 01-013 Indice 1 Introduzione 5 1.1 Indice di rifrazione.............................. 5 1. Riflessione e rifrazione............................
Lezione. Sito, Orari, Ricevimento
 Lezioni giovedi venerdi Corso Introduzione 15.45-19.00 12:00-13:30 A3 A3 Lezione+ Lab Lezione Sito, Orari, Ricevimento Esami Il sito del corso è http://www.dis.uniroma1.it/~visiope Ricevimento: lunedì
Lezioni giovedi venerdi Corso Introduzione 15.45-19.00 12:00-13:30 A3 A3 Lezione+ Lab Lezione Sito, Orari, Ricevimento Esami Il sito del corso è http://www.dis.uniroma1.it/~visiope Ricevimento: lunedì
FISICA APPLICATA 2 FENOMENI ONDULATORI - 2
 FISICA APPLICATA 2 FENOMENI ONDULATORI - 2 DOWNLOAD Il pdf di questa lezione (onde2.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 10/10/2017 LE ONDE NELLO SPAZIO Finora si è considerata
FISICA APPLICATA 2 FENOMENI ONDULATORI - 2 DOWNLOAD Il pdf di questa lezione (onde2.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 10/10/2017 LE ONDE NELLO SPAZIO Finora si è considerata
Unitre Soletta: Corso di Fisica Pratica
 Unitre Soletta: Corso di Fisica Pratica Soletta 3 maggio 2016 Il mouse ottico Un topolino che si è evoluto molto Rotella Primi ottici Ma con un principio di funzionamento identico La stampante LASER Perché
Unitre Soletta: Corso di Fisica Pratica Soletta 3 maggio 2016 Il mouse ottico Un topolino che si è evoluto molto Rotella Primi ottici Ma con un principio di funzionamento identico La stampante LASER Perché
5 Fondamenti di Ottica
 Laboratorio 2B A.A. 2012/2013 5 Fondamenti di Ottica Formazione immagini Superfici rifrangenti Lenti sottili Lenti spessi Punti cardinali Ottica geometrica In ottica geometrica si analizza la formazione
Laboratorio 2B A.A. 2012/2013 5 Fondamenti di Ottica Formazione immagini Superfici rifrangenti Lenti sottili Lenti spessi Punti cardinali Ottica geometrica In ottica geometrica si analizza la formazione
Acquisizione e rappresentazione di immagini
 Acquisizione e rappresentazione di immagini Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Radiazione elettromagnetica λ
Acquisizione e rappresentazione di immagini Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Radiazione elettromagnetica λ
DISPENSE DI PROGETTAZIONE OTTICA PROGETTAZIONE DI STRUMENTI OTTICI. Cap.4 SISTEMI OTTICI
 DISPENSE DI PROGETTAZIONE OTTICA PROGETTAZIONE DI STRUMENTI OTTICI Cap.4 SISTEMI OTTICI Ing. Fabrizio Liberati Cap. 4 SISTEMI OTTICI 4.1 Obiettivi per uso fotografico Gli obiettivi per uso fotografico
DISPENSE DI PROGETTAZIONE OTTICA PROGETTAZIONE DI STRUMENTI OTTICI Cap.4 SISTEMI OTTICI Ing. Fabrizio Liberati Cap. 4 SISTEMI OTTICI 4.1 Obiettivi per uso fotografico Gli obiettivi per uso fotografico
Sistemi di Visione. Telecamere: applicazioni on-line: visione robotica, ispezione industriale, sorveglianza, riconoscimento volto, ecc.
 Sistemi di Visione Hardware Ogni applicazione reale di pattern recognition, necessita di un sistema hardware per l acquisizione del segnale: Telecamere: applicazioni on-line: visione robotica, ispezione
Sistemi di Visione Hardware Ogni applicazione reale di pattern recognition, necessita di un sistema hardware per l acquisizione del segnale: Telecamere: applicazioni on-line: visione robotica, ispezione
Sistemi con zoom a scatti
 Sistemi con zoom a scatti Sommario Sistemi video-zoom per la misurazione a 2D 2 Sistemi con zoom a scatti Sistemi video-zoom per la misurazione a 2D Se l ingrandimento deve essere modificato durante una
Sistemi con zoom a scatti Sommario Sistemi video-zoom per la misurazione a 2D 2 Sistemi con zoom a scatti Sistemi video-zoom per la misurazione a 2D Se l ingrandimento deve essere modificato durante una
e-vision Telecamere Analogiche 1000 TVL elmospa.com Global security solutions
 e-vision Telecamere Analogiche 1000 TVL elmospa.com Global security solutions Tecnologia in continua evoluzione La serie di telecamere a 1000 linee TV rappresenta l ultimo step evolutivo della gamma di
e-vision Telecamere Analogiche 1000 TVL elmospa.com Global security solutions Tecnologia in continua evoluzione La serie di telecamere a 1000 linee TV rappresenta l ultimo step evolutivo della gamma di
Riconoscimento Facciale DVR Guida Rapida
 Riconoscimento Facciale DVR Guida Rapida Indice Introduzione...2 Scelta della camera...2 Settaggio dell angolo della camera...3 Angolo Orizzontale...3 Angolo Verticale...3 Distanza della camera e lunghezza
Riconoscimento Facciale DVR Guida Rapida Indice Introduzione...2 Scelta della camera...2 Settaggio dell angolo della camera...3 Angolo Orizzontale...3 Angolo Verticale...3 Distanza della camera e lunghezza
SUDDIVISIONE DEGLI OBIETTIVI LUNGHEZZA FOCALE STABILIZZATI O NON PER FORMATO APS O PER FULL FRAME
 SUDDIVISIONE DEGLI OBIETTIVI LUNGHEZZA FOCALE LUMINOSITA' OBIETTIVI ZOOM O FISSI STABILIZZATI O NON PER FORMATO APS O PER FULL FRAME LUNGHEZZA FOCALE OBIETTIVI GRANDANGOLARI DISTORGONO I SOGGETTI QUANDO
SUDDIVISIONE DEGLI OBIETTIVI LUNGHEZZA FOCALE LUMINOSITA' OBIETTIVI ZOOM O FISSI STABILIZZATI O NON PER FORMATO APS O PER FULL FRAME LUNGHEZZA FOCALE OBIETTIVI GRANDANGOLARI DISTORGONO I SOGGETTI QUANDO
IL MICROSCOPIO: apparecchiatura capace di ridurre il limite di risoluzione dell occhio umano (distanza minima di due punti percepiti come separati
 IL MICROSCOPIO: apparecchiatura capace di ridurre il limite di risoluzione dell occhio umano (distanza minima di due punti percepiti come separati tra di loro) a seconda della radiazione utilizzata per
IL MICROSCOPIO: apparecchiatura capace di ridurre il limite di risoluzione dell occhio umano (distanza minima di due punti percepiti come separati tra di loro) a seconda della radiazione utilizzata per
Aberrazioni. Aberrazioni
 Aberrazione Sferica o di Apertura Minimizziamo la AS: 2. impiego di superfici asferiche (vd dopo applicazione in telescopi) Aberrazione Sferica o di Apertura Minimizziamo la AS: 2. impiego di superfici
Aberrazione Sferica o di Apertura Minimizziamo la AS: 2. impiego di superfici asferiche (vd dopo applicazione in telescopi) Aberrazione Sferica o di Apertura Minimizziamo la AS: 2. impiego di superfici
USB 2.0 Camera CV-UI-1008-XS-C
 USB 2.0 Camera CV-UI-1008-XS-C Sommario USB 2.0 Camera CV-UI-1008-XS-C 2 I dati tecnici principali del CV-UI-1008XS-C 2 Dati tecnici CV-UI-1008-XS-C: 3 Specifiche del sensore 3 Istruzioni per l uso dell
USB 2.0 Camera CV-UI-1008-XS-C Sommario USB 2.0 Camera CV-UI-1008-XS-C 2 I dati tecnici principali del CV-UI-1008XS-C 2 Dati tecnici CV-UI-1008-XS-C: 3 Specifiche del sensore 3 Istruzioni per l uso dell
5 Lenti e Specchi. Formazione immagini Specchi Superfici rifrangenti Lenti sottili Lenti spessi Punti cardinali
 Laboratorio di didattica della Fisica (III modulo): Metodologie di insegnamento del Laboratorio di Ottica Formazione immagini Specchi Superfici rifrangenti Lenti sottili Lenti spessi Punti cardinali 5
Laboratorio di didattica della Fisica (III modulo): Metodologie di insegnamento del Laboratorio di Ottica Formazione immagini Specchi Superfici rifrangenti Lenti sottili Lenti spessi Punti cardinali 5
Telerilevamento e Modellistica Forestale
 Telerilevamento e Modellistica Forestale Lezione 3 Immagini digitali e visualizzazione Dario Papale Contributi: Vern Vanderbilt, TA- Quinn Hart, CCRS Radiazione riflessa Diverse superfici riflettono parte
Telerilevamento e Modellistica Forestale Lezione 3 Immagini digitali e visualizzazione Dario Papale Contributi: Vern Vanderbilt, TA- Quinn Hart, CCRS Radiazione riflessa Diverse superfici riflettono parte
ANALISI SPETTROFOTOMETRICA IN AMBIENTE CON DISPOSITIVO PURITY DI GEOLAM PER IL MIGLIORAMENTO DELL HABITAT IN GENERALE
 STUDIO PERITALE C.T.U. DANIELE GULLA INDAGINI FOTOGRAFICHE, SPETTROFOTOMETRICHE, ANTROPOLOGICHE, FONICHE, BIOMETRICHE 40127 BOLOGNA VIA FANI, 7 TEL. 339-3131594 EMAIL: gulladaniele@libero.it ANALISI SPETTROFOTOMETRICA
STUDIO PERITALE C.T.U. DANIELE GULLA INDAGINI FOTOGRAFICHE, SPETTROFOTOMETRICHE, ANTROPOLOGICHE, FONICHE, BIOMETRICHE 40127 BOLOGNA VIA FANI, 7 TEL. 339-3131594 EMAIL: gulladaniele@libero.it ANALISI SPETTROFOTOMETRICA
ScrappiX. Macchina per il controllo dimensionale e dei difetti superficiali
 ScrappiX Macchina per il controllo dimensionale e dei difetti superficiali ScrappiX Macchina per il controllo dimensionale e dei difetti superficiali Scrappix è un innovativa macchina d ispezione visiva
ScrappiX Macchina per il controllo dimensionale e dei difetti superficiali ScrappiX Macchina per il controllo dimensionale e dei difetti superficiali Scrappix è un innovativa macchina d ispezione visiva
Lez. 5 Digital Image Processing
 Lez. 5 Digital Image Processing Prof. Giovanni Mettivier 1 Dott. Giovanni Mettivier, PhD Dipartimento Scienze Fisiche Università di Napoli Federico II Compl. Univ. Monte S.Angelo Via Cintia, I-80126, Napoli
Lez. 5 Digital Image Processing Prof. Giovanni Mettivier 1 Dott. Giovanni Mettivier, PhD Dipartimento Scienze Fisiche Università di Napoli Federico II Compl. Univ. Monte S.Angelo Via Cintia, I-80126, Napoli
Misure attraverso sistemi di visione. Ing. Emanuele Zappa
 Misure attraverso sistemi di visione Ing. Emanuele Zappa Formazione dell immagine e visione 2 Il processo di formazione dell immagine può essere inteso come il processo opposto alla visione: Formazione
Misure attraverso sistemi di visione Ing. Emanuele Zappa Formazione dell immagine e visione 2 Il processo di formazione dell immagine può essere inteso come il processo opposto alla visione: Formazione
ANGIO XL MN8/MN12/MN25 Specifiche tecniche
 ANGIO XL MN8/MN12/MN25 Specifiche tecniche Complesso Radiogeno Tubo Radiogeno Macchia Focale Potenza Tubo Capacità Termica Anodo Dissipazione Termica Anodo Capacità Termica Cuffia Dissipazione Termica
ANGIO XL MN8/MN12/MN25 Specifiche tecniche Complesso Radiogeno Tubo Radiogeno Macchia Focale Potenza Tubo Capacità Termica Anodo Dissipazione Termica Anodo Capacità Termica Cuffia Dissipazione Termica
M.PAOLILLO (E IL GRUPPO DI ASTROFISICA) MISURE ASTRONOMICHE CON IL TELESCOPIO DE RITIS
 MISURE ASTRONOMICHE CON IL TELESCOPIO DE RITIS") M.PAOLILLO (E IL GRUPPO DI ASTROFISICA) MISURE ASTRONOMICHE CON IL TELESCOPIO DE RITIS PRINCIPI DI OTTICA: RIFRATTORE RITCHEY- CHRÉTIEN Il Planewave CDK 20 della Baader Planetarium è un telescopio rifrattore
M.PAOLILLO (E IL GRUPPO DI ASTROFISICA) MISURE ASTRONOMICHE CON IL TELESCOPIO DE RITIS PRINCIPI DI OTTICA: RIFRATTORE RITCHEY- CHRÉTIEN Il Planewave CDK 20 della Baader Planetarium è un telescopio rifrattore
Fisica II - CdL Chimica. Formazione immagini Superfici rifrangenti Lenti sottili Strumenti ottici
 Formazione immagini Superfici rifrangenti Lenti sottili Strumenti ottici Ottica geometrica In ottica geometrica si analizza la formazione di immagini assumendo che la luce si propaghi in modo rettilineo
Formazione immagini Superfici rifrangenti Lenti sottili Strumenti ottici Ottica geometrica In ottica geometrica si analizza la formazione di immagini assumendo che la luce si propaghi in modo rettilineo
Periferiche. Periferiche. Periferiche. Periferiche. Architettura dell elaboratore
 Architettura dell elaboratore Fino ad ora struttura interna dell elaboratore Consideriamo componenti che permettono interazione con l esterno Immissione dati (input) Emissione dati (output) Periferica
Architettura dell elaboratore Fino ad ora struttura interna dell elaboratore Consideriamo componenti che permettono interazione con l esterno Immissione dati (input) Emissione dati (output) Periferica
Spaccato di una reflex
 Spaccato di una reflex SENSORI DIGITALI E PELLICOLE Acquisizione mediante Sensore digitale Acquisizione mediante Pellicola Sensore analogico Il sensore digitale È un componente hardware costituito da elementi
Spaccato di una reflex SENSORI DIGITALI E PELLICOLE Acquisizione mediante Sensore digitale Acquisizione mediante Pellicola Sensore analogico Il sensore digitale È un componente hardware costituito da elementi
Operazioni puntuali. Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma
 Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma Analisi di Basso Livello In ingresso abbiamo le immagini provenienti dai sensori. In uscita si hanno un insieme di matrici ognuna delle
Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma Analisi di Basso Livello In ingresso abbiamo le immagini provenienti dai sensori. In uscita si hanno un insieme di matrici ognuna delle
7 Cenni di ottica per la fotografia
 7 Cenni di ottica per la fotografia 7.1 Schematizzazione di un obiettivo fotografico Gli obiettivi fotografici sono generalmente composti da un numero elevato di lenti. Tuttavia per semplicità possiamo
7 Cenni di ottica per la fotografia 7.1 Schematizzazione di un obiettivo fotografico Gli obiettivi fotografici sono generalmente composti da un numero elevato di lenti. Tuttavia per semplicità possiamo
Elenco di controllo per il vostro microscopio - I vostri requisiti. 1) Che tipo di microscopio vi serve?
 Che tipo di microscopio vi serve?") Elenco di controllo per il vostro microscopio - I vostri requisiti 1) Che tipo di microscopio vi serve? Microscopio a luce passante (utilizzato principalmente per campioni trasparenti/traslucenti) (pagina:
Elenco di controllo per il vostro microscopio - I vostri requisiti 1) Che tipo di microscopio vi serve? Microscopio a luce passante (utilizzato principalmente per campioni trasparenti/traslucenti) (pagina:
La fotografia PR O F. G IA NDO MENI CO PE T R O LLINI
 La fotografia P R O F. G IANDOMENICO P E T R O LLINI Professionista = una persona in grado di fornire un risultato/obiettivo Professionalità = progettualità = la capacità di scelta preventiva di modi e
La fotografia P R O F. G IANDOMENICO P E T R O LLINI Professionista = una persona in grado di fornire un risultato/obiettivo Professionalità = progettualità = la capacità di scelta preventiva di modi e
Le immagini digitali
 Le immagini digitali immagini raster immagini vettoriali Immagini raster Dette pittoriche o pixel oriented dividono l immagine in una griglia uniforme. Ciascuna cella della griglia ha uguale dimensione.
Le immagini digitali immagini raster immagini vettoriali Immagini raster Dette pittoriche o pixel oriented dividono l immagine in una griglia uniforme. Ciascuna cella della griglia ha uguale dimensione.
I sensori per la robotica mobile Giovanni De Luca
 www.delucagiovanni.com deluca@lns.infn.it I sensori per la robotica mobile Sensori per la robotica Sensori per la robotica 2 Sensori per la robotica Tre famiglie principali Sensori analogici Quando i valori
www.delucagiovanni.com deluca@lns.infn.it I sensori per la robotica mobile Sensori per la robotica Sensori per la robotica 2 Sensori per la robotica Tre famiglie principali Sensori analogici Quando i valori
Lezione 14: La visione robotica
 Robotica Robot Industriali e di Servizio Lezione 14: La visione robotica L'acquisizione dell'immagine L acquisizione dell immagine Sensori a tubo elettronico (Image-Orthicon, Plumbicon, Vidicon, ecc.)
Robotica Robot Industriali e di Servizio Lezione 14: La visione robotica L'acquisizione dell'immagine L acquisizione dell immagine Sensori a tubo elettronico (Image-Orthicon, Plumbicon, Vidicon, ecc.)
Parte 1/4: Formazione delle immagini
 Parte 1/4: A.A. 2008-2009 - Corso di Computer Vision Eugenio Rustico rustico@dmi.unict.it D.M.I. - Università di Catania Versione: 30 marzo 2009 5-6 lezioni su Formazione dell immagine Calibrazione della
Parte 1/4: A.A. 2008-2009 - Corso di Computer Vision Eugenio Rustico rustico@dmi.unict.it D.M.I. - Università di Catania Versione: 30 marzo 2009 5-6 lezioni su Formazione dell immagine Calibrazione della
I Figura C.1 Figura C.2 Figura C.3
 Video digitale: la ripresa Inserto a colori I Figura C.1 Errori di impaginazione, colore e dimensione del carattere a schermo TV (Figura 1.2 nel testo). Figura C.2 Opere video di Giacomo Verde realizzate
Video digitale: la ripresa Inserto a colori I Figura C.1 Errori di impaginazione, colore e dimensione del carattere a schermo TV (Figura 1.2 nel testo). Figura C.2 Opere video di Giacomo Verde realizzate
1 S/f. M = A t = A + CT = 1 S f
 Ot Una lente sottile con focale f 50 mm è utilizzata per proiettare su di uno schermo l immagine di un oggetto posto a 5 m. SI determini la posizione T dello schermo e l ingrandimento che si ottiene La
Ot Una lente sottile con focale f 50 mm è utilizzata per proiettare su di uno schermo l immagine di un oggetto posto a 5 m. SI determini la posizione T dello schermo e l ingrandimento che si ottiene La
Elaborazione delle immagini a basso livello
 Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Uso degli apparecchi elettrosensibili di protezione: cosa è necessario sapere...
 Uso degli apparecchi elettrosensibili di protezione: cosa è necessario sapere... Parte 1 della normativa IEC / EN 61496: maggiore resistenza ai guasti necessità di rilevare eventuali guasti é é controllo
Uso degli apparecchi elettrosensibili di protezione: cosa è necessario sapere... Parte 1 della normativa IEC / EN 61496: maggiore resistenza ai guasti necessità di rilevare eventuali guasti é é controllo
Hyperloop: TRIANGOLAZIONE LASER, SISTEMI DI VISIONE. A. Pozzebon 1 Giugno 2018
 Hyperloop: TRIANGOLAZIONE LASER, SISTEMI DI VISIONE A. Pozzebon 1 Giugno 2018 SOMMARIO LA TRIANGOLAZIONE LASER IL LASER ALGORITMI DI ELABORAZIONE DELLE IMMAGINI TELECAMERE AD ALTA VELOCITÀ HYPERLOOP: LE
Hyperloop: TRIANGOLAZIONE LASER, SISTEMI DI VISIONE A. Pozzebon 1 Giugno 2018 SOMMARIO LA TRIANGOLAZIONE LASER IL LASER ALGORITMI DI ELABORAZIONE DELLE IMMAGINI TELECAMERE AD ALTA VELOCITÀ HYPERLOOP: LE
RestauroCam: Telecamera per Restauro
 BIOFOTONICA S.R.L. Sede Legale: Grosseto Via Birmania 113, CAP. 58100 Tel: +390564455595 Fax: +390564456332 Sede Commerciale: Roma Via A. Bocchi 300, CAP 00125 Tel: +390681175637 Fax: +390689280737 RestauroCam:
BIOFOTONICA S.R.L. Sede Legale: Grosseto Via Birmania 113, CAP. 58100 Tel: +390564455595 Fax: +390564456332 Sede Commerciale: Roma Via A. Bocchi 300, CAP 00125 Tel: +390681175637 Fax: +390689280737 RestauroCam:
d >> λ rettilinea raggio luminoso riflessione rifrazione
 Ottica geometrica Proprietà più macroscopiche della luce d >> λ Propagazione rettilinea della luce (no diffrazione) Fondamentale concetto di raggio luminoso il cui percorso è determinato dalle leggi della
Ottica geometrica Proprietà più macroscopiche della luce d >> λ Propagazione rettilinea della luce (no diffrazione) Fondamentale concetto di raggio luminoso il cui percorso è determinato dalle leggi della
Ottica Geometrica. (λà 0 trascuriamo i fenomeni di diffrazione )
") Ottica Geometrica Ottica Geometrica Metodo approssimato che permette di studiare il comportamento della luce quando incontra discontinuità nello spazio in cui si propaga, nei casi in cui la lunghezza d
Ottica Geometrica Ottica Geometrica Metodo approssimato che permette di studiare il comportamento della luce quando incontra discontinuità nello spazio in cui si propaga, nei casi in cui la lunghezza d
Aberrazioni. NB dip. da n e p. [JW] Aberrazione Sferica o di Apertura. Minimizziamo la AS: 1. agiamo sul fattore di forma. Fattore di forma ottimale
![Aberrazioni. NB dip. da n e p. [JW] Aberrazione Sferica o di Apertura. Minimizziamo la AS: 1. agiamo sul fattore di forma. Fattore di forma ottimale](/thumbs/95/124502871.jpg "Aberrazioni. NB dip. da n e p. [JW] Aberrazione Sferica o di Apertura. Minimizziamo la AS: 1. agiamo sul fattore di forma. Fattore di forma ottimale") [JW] Aberrazione Sferica o di Apertura Minimizziamo la AS: 1. agiamo sul fattore di forma Fattore di forma ottimale NB dip. da n e p q min nel grafico assumiamo n=1.5 & p= -1 Aberrazione Sferica o di Apertura
[JW] Aberrazione Sferica o di Apertura Minimizziamo la AS: 1. agiamo sul fattore di forma Fattore di forma ottimale NB dip. da n e p q min nel grafico assumiamo n=1.5 & p= -1 Aberrazione Sferica o di Apertura
I raggi luminosi. Per secoli si sono contrapposti due modelli della luce. il modello ondulatorio (Christiaan Huygens)
") I raggi luminosi Per secoli si sono contrapposti due modelli della luce il modello corpuscolare (Newton) * la luce è un flusso di particelle microscopiche il modello ondulatorio (Christiaan Huygens) *
I raggi luminosi Per secoli si sono contrapposti due modelli della luce il modello corpuscolare (Newton) * la luce è un flusso di particelle microscopiche il modello ondulatorio (Christiaan Huygens) *
Preparazione del programma Arduino per gestire il LED RGB. Aprire Arduino IDE e creare un nuovo file.
 Il funzionamento di un LED (Light Emitting Diode) Esperimento: Analisi della figura di diffrazione prodotta da un reticolo illuminato da una sorgente LED Materiali e strumenti Rotaia graduata Lente con
Il funzionamento di un LED (Light Emitting Diode) Esperimento: Analisi della figura di diffrazione prodotta da un reticolo illuminato da una sorgente LED Materiali e strumenti Rotaia graduata Lente con
M.PAOLILLO (E IL GRUPPO DI ASTROFISICA) ACQUISIZIONE ED ANALISI DI IMMAGINI ASTRONOMICHE CON IL TELESCOPIO DE RITIS
 ACQUISIZIONE ED ANALISI DI IMMAGINI ASTRONOMICHE CON IL TELESCOPIO DE RITIS") M.PAOLILLO (E IL GRUPPO DI ASTROFISICA) ACQUISIZIONE ED ANALISI DI IMMAGINI ASTRONOMICHE CON IL TELESCOPIO DE RITIS PRINCIPI DI OTTICA: RIFRATTORE RITCHEY- CHRÉTIEN Il Planewave CDK 20 della Baader Planetarium
M.PAOLILLO (E IL GRUPPO DI ASTROFISICA) ACQUISIZIONE ED ANALISI DI IMMAGINI ASTRONOMICHE CON IL TELESCOPIO DE RITIS PRINCIPI DI OTTICA: RIFRATTORE RITCHEY- CHRÉTIEN Il Planewave CDK 20 della Baader Planetarium
Fisica della Visione Introduzione
 1 Introduzione 2 Lezione 18 Sistemi ottici non stigmatici: pupille, aberrazioni Pupille di entrata e uscita. Sistemi ottici stigmatici. Aberrazioni. Aberrazioni monocromatiche. Sistemi ottici astigmatici.
1 Introduzione 2 Lezione 18 Sistemi ottici non stigmatici: pupille, aberrazioni Pupille di entrata e uscita. Sistemi ottici stigmatici. Aberrazioni. Aberrazioni monocromatiche. Sistemi ottici astigmatici.
I esonero di Ottica Geometria a.a compito A
 I esonero di Ottica Geometria a.a. 2016-17 compito A Un onda elettromagnetica piana con frequenza 5x10 12 Hz entra con incidenza normale in un mezzo spesso 10 Km. Sapendo che la luce impiega un tempo t=50
I esonero di Ottica Geometria a.a. 2016-17 compito A Un onda elettromagnetica piana con frequenza 5x10 12 Hz entra con incidenza normale in un mezzo spesso 10 Km. Sapendo che la luce impiega un tempo t=50
Principio di Huygens (1678)
") Principio di Huygens (1678) Tutti i punti di un fronte d onda possono essere considerati come sorgenti secondarie di onde sferiche; in un generico punto P l onda risultante si può ottenere come sovrapposizione
Principio di Huygens (1678) Tutti i punti di un fronte d onda possono essere considerati come sorgenti secondarie di onde sferiche; in un generico punto P l onda risultante si può ottenere come sovrapposizione
1/5 TELEC. IP PTZ 3MP, ZOOM 30X, IR 150M, IP66 OVERVIEW IPPTZ130IRB
 1/5 OVERVIEW Telecamera IP dome PTZ all-in-one a colori Day & Night, zoom ottico 30x, risoluzione 3MP@30 ips, contenitore da 6" waterproof IP66, illuminatori ad infrarossi con portata fino a 150 metri,
1/5 OVERVIEW Telecamera IP dome PTZ all-in-one a colori Day & Night, zoom ottico 30x, risoluzione 3MP@30 ips, contenitore da 6" waterproof IP66, illuminatori ad infrarossi con portata fino a 150 metri,
GUIDA PER UNA SCANSIONE OTTIMALE
 Condizioni per ottenere una buona scansione I fattori che intervengono nel processo di scansione sono fattori ambientali, propri della configurazione e della calibrazione dello scanner e dell oggetto da
Condizioni per ottenere una buona scansione I fattori che intervengono nel processo di scansione sono fattori ambientali, propri della configurazione e della calibrazione dello scanner e dell oggetto da
Laboratorio di Ottica, Spettroscopia, Astrofisica
 Università degli Studi di Palermo Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Progetto Lauree Scientifiche Laboratorio di Ottica, Spettroscopia, Astrofisica Antonio Maggio
Università degli Studi di Palermo Facoltà di Scienze Matematiche, Fisiche e Naturali Corso di Laurea in Fisica Progetto Lauree Scientifiche Laboratorio di Ottica, Spettroscopia, Astrofisica Antonio Maggio
Lezioni di Microscopia
 DEPARTMENT OF HEALTH, ANIMAL SCIENCE AND FOOD SAFETY Lezioni di Microscopia Valentina Lodde valentina.lodde@unimi.it Reproductive and Developmental Biology Laboratory - www.redbiolab.unimi.it Analisi morfologica
DEPARTMENT OF HEALTH, ANIMAL SCIENCE AND FOOD SAFETY Lezioni di Microscopia Valentina Lodde valentina.lodde@unimi.it Reproductive and Developmental Biology Laboratory - www.redbiolab.unimi.it Analisi morfologica
Acquisizione Dati. Introduzione
 UNIVERSITÀ DEGLI STUDI DI CAGLIARI Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali Corso di Sperimentazione sulle Macchine Acquisizione Dati Introduzione Introduzione In campo scientifico
UNIVERSITÀ DEGLI STUDI DI CAGLIARI Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali Corso di Sperimentazione sulle Macchine Acquisizione Dati Introduzione Introduzione In campo scientifico
PhotoDay Comunicazione
 POLITECNICO DI MILANO LabFoto INDACO Fotografia in studio Sergio Oriani PhotoDay Introduzione al laboratorio VR 2 Introduzione al laboratorio 3 Introduzione al laboratorio 4 Nozioni di sicurezza Non far
POLITECNICO DI MILANO LabFoto INDACO Fotografia in studio Sergio Oriani PhotoDay Introduzione al laboratorio VR 2 Introduzione al laboratorio 3 Introduzione al laboratorio 4 Nozioni di sicurezza Non far