I.T.S. ALDINI VALERIANI SIRIANI TESINA D'ESAME DI STATO DI: FABBRI MIRCO SEMPREVIVO RICCARDO SFREGOLA MICHELE CLASSE: 5A MECCANICA
|
|
|
- Costanza Chiesa
- 7 anni fa
- Visualizzazioni
Transcript
1 I.T.S. ALDINI VALERIANI SIRIANI TESINA D'ESAME DI STATO DI: FABBRI MIRCO SEMPREVIVO RICCARDO SFREGOLA MICHELE CLASSE: 5A MECCANICA ANNO SCOLASTICO: 2011/2012

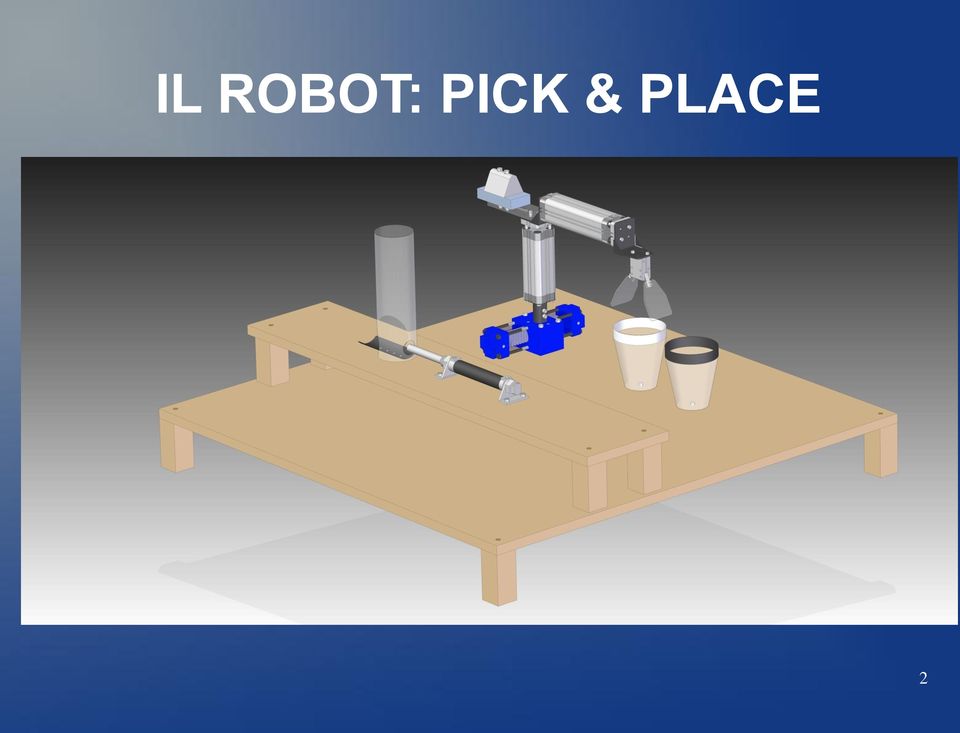
2 IL ROBOT: PICK & PLACE 2
3 IL ROBOT: PICK & PLACE L'IDEA IL DISEGNO LA COSTRUZIONE IL FUNZIONAMENTO LE CARATTERISTICHE DEL PLC LE MOVIMENTAZIONI I SENSORI 3

4 L'IDEA Questo progetto nasce dall'idea di costruire un robot pneumatico in grado di afferrare e di spostare oggetti. I robot di questo tipo sono detti "Pick and place", dall'inglese "pick" = afferrare e "place" = collocare, sono robot automatici muniti di organi di presa costruiti per spostare, smistare o ricollocare pezzi e minuteria di ogni tipo. Innanzitutto si è cominciato decidendo quali sarebbero stati gli oggetti da manipolare e la scelta è caduta su delle palline. 4

5 L'IDEA Insieme si è deciso quale sarebbe stata la struttura finale del robot, scegliendo di costruire una sorta di braccio estensibile in grado di ruotare su se stesso e munito di una pinza capace di afferrare le palline. Valutando le varie possibilità si è deciso di utilizzare dei cilindri pneumatici per effettuare i vari movimenti del robot, in quanto la pneumatica consente rapidi spostamenti e ben si presta alle ridotte forze in gioco. 5

6 L'IDEA Una particolare caratteristica richiesta al robot sarebbe stata la capacità di distinguere il colore della pallina da manipolare. Il robot avrebbe quindi afferrato palline di colore diverso, riconoscendone il colore, le avrebbe collocate in contenitori differenti. 6


7 IL DISEGNO Il progetto del robot è stato eseguito utilizzando un CAD 3D (Solid Edge ST3), l'utilizzo di un software 3D per un disegno consente di verificare gli ingombri ed i volumi del sistema, avendo così un' immediata visione del risultato finale ed un riscontro delle eventuali problematiche. 7


8 IL DISEGNO 8

9 LA COSTRUZIONE Il primo passo per costruire il robot è disegnare i componenti commerciali: cilindri pneumatici, viti, dadi ecc... Poi viene lo studio dei particolari da realizzare artigianalmente come giunti, supporti e staffe. Una volta stabilite le dimensioni vengono progettati al computer e quindi realizzati effettuando lavorazioni di tornitura, fresatura, foratura, taglio e saldatura. 9

10 LA COSTRUZIONE Tutta la struttura viene montata su una tavola in legno appositamente tagliata. Il processo di costruzione prevede prima l'assemblaggio tra loro dei singoli componenti del braccio meccanico, poi il montaggio del braccio sulla tavola. 10

11 LA COSTRUZIONE Assemblata la struttura meccanica si procede con il cablaggio del sistema, che prevede il montaggio delle valvole pneumatiche dei cilindri, la loro logica di comando ed il complesso di alimentazione dell'aria. Questi elementi costituiscono la parte pneumatica del sistema ed hanno il compito di alimentare i cilindri controllandone il movimento. 11

12 LA COSTRUZIONE Il cablaggio pneumatico è affiancato dal cablaggio elettrico che fornisce energia ai sensori ed alle elettrovalvole, è composto dai pulsanti di controllo (Start, Stop e Prova ciclo) e dalla scatola dei connettori collegata al PLC. 12
 e dalla scatola dei connettori collegata")
13 IL FUNZIONAMENTO I movimenti del robot vengono comandati dal PLC il quale segue la sequenza di istruzioni stabilita nel programma. Il primo passo è stabilire l'ordine dei movimenti del robot e la loro successione, tale operazione è stata eseguita simulando i movimenti del robot mediante l utilizzo dell animazione dei disegni 3d. Ciclo per pallina nera Ciclo per pallina bianca 13

14 IL FUNZIONAMENTO Ottenuto l'elenco di istruzioni si procede rappresentandolo graficamente nel diagramma Grafcet, che rende la sequenza chiaramente leggibile ed ordinata. 14

15 IL FUNZIONAMENTO Successivamente si sono stabilite tutte le assegnazioni, cioè fatto corrispondere ogni entrata e uscita con i nomi delle entrate ed delle uscite dal PLC. 15

16 IL FUNZIONAMENTO Infine il diagramma Grafcet viene poi tradotto in linguaggio AWL, un linguaggio comprensibile dal PLC, andando così a creare il programma definitivo di funzionamento. 16

17 LE CARATTERISTICHE DEL PLC Per comandare il nostro robot abbiamo utilizzato un PLC monoblocco della SIEMENS. il PLC è sincrono a 16 bit cioè costituito da 16 ingressi e 16 uscite funziona mediante una flashcard contenete il programma, sulla struttura del PLC sono presenti numerosi connettori che comprendono relè, temporizzatori, interruttori, elettrovalvole, alimentazioni, gli ingressi e le uscite 17

18 LE MOVIMENTAZIONI Il robot è costituito da: 3 cilindri pneumatici lineari una pinza pneumatica un cilindro pneumatico rotativo 18

19 LE MOVIMENTAZIONI I cilindri pneumatici lineari costituiscono i giunti prismatici che consentono le movimentazioni di traslazione come l allungamento, il sollevamento e le movimentazione del caricatore. 19

20 LE MOVIMENTAZIONI La pinza pneumatica è un particolare cilindro pneumatico che mediante dei leverismi riesce a controllare due estremità che costituiscono le dita delle pinze. 20

21 LE MOVIMENTAZIONI Il cilindro rotativo costituisce il giunto rotativo che permette di compiere la rotazione di 90 gradi. I cilindri rotativi sono composti da un pistone e da un pignone calettato su un albero. Il pistone differisce da quello dei normali cilindri pneumatici lineari in quanto il corpo dello stesso è una cremagliera che accoppiata al pignone consente di trasformare una movimentazione lineare del pistone in una movimentazione rotativa del albero. 21
22 I SENSORI Questo robot utilizza tre differenti tipi di sensori: Un sensore di presenza pezzo Sensori magnetici reed Un sensore ottico 22
23 I SENSORI Il sensore di presenza pezzo serve a segnalare la presenza di un pezzo sulla linea, quando una pallina si avvicina al sensore e lo tocca, aziona un tastatore (a rotella) che chiude un contatto elettrico. Viene inviato un segnale al cervello del sistema, il PLC, indicandogli che un pezzo ha appena raggiunto la sua posizione, ed è quindi pronto per essere preso e ricollocato. Il sensore presenza pezzo fa parte dei sensori esterni, perché rileva informazioni riguardo un elemento esterno al robot, le palline. 23
24 I SENSORI Sensori magnetici reed : questi sono sensori magnetici, cioè costituito da un contatto elettrico che viene azionato dall attrazione magnetica di un corpo che si trova nelle vicinanze. I sensori di tipo reed vengono utilizzati come sensori di fine-corsa nei cilindri pneumatici, il loro compito quindi è quello di rilevare quando un cilindro muovendosi arriva a finecorsa, segno che è tempo di comandare il movimento successivo. Questo è reso possibile da un anello ferromagnetico posto sul pistone del cilindro, che trovandosi nei pressi del sensore ne provoca la chiusura del contatto. Questo sensore è del tipo interno, perché rileva lo spostamento dei cilindri che costituiscono il robot stesso. 24
25 I SENSORI Un sensore ottico: questo sensore ha il compito di riconoscere e distinguere il colore dei diversi oggetti in arrivo, possiamo considerarlo come l occhio della macchina. Esso infatti distingue le palline bianche da quelle nere e segnalando questa informazione al PLC fa sì che il robot riesca a collocarle nel posto giusto. Per funzionare questo tipo di sensore emette un piccolo fascio luminoso, che arrivando contro all oggetto viene riflesso ritornando indietro. Sfruttando il fatto che due superfici di colore diverso riflettono la luce in modo diverso, il sensore riesce a riconoscere il colore delle palline in arrivo. Il sensore ottico è un sensore esterno, perché riconosce una caratteristica del sistema che circonda il robot, il colore del pezzo in arrivo. 25
26 CONCLUSIONE La creazione di questa macchina automatica ha permesso di iniziare una nuova esperienza di lavoro per collaborare tra noi al fine di superare le molteplici difficoltà derivanti dalla creazione del robot, giungendo infine con molta soddisfazione alla sua realizzazione.
27 RINGRAZIAMENTI I nostri ringraziamenti vanno ai professori Burnelli, Fava e Foresti per averci aiutato nella realizzazione del robot ed al preside Salvatore Grillo per aver acquistato i materiali necessari per alla realizzazione dello stesso
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007
 SAVE Veronafiere 23-25 Ottobre 2007") Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007 Argomenti trattati Cosa è un P.L.C.? Logica cablata (Relé) Logica con il P.L.C. Vantaggi
Perché il P.L.C.? Introduzione di base al P.L.C. (Programmable Logic Controller) SAVE Veronafiere 23-25 Ottobre 2007 Argomenti trattati Cosa è un P.L.C.? Logica cablata (Relé) Logica con il P.L.C. Vantaggi
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
Un comando elettropneumatico è un automatismo con: Blocco di attuazione pneumatico Blocco logico elettrico
 ELETTROPNEUMATICA Un comando elettropneumatico è un automatismo con: Blocco di attuazione pneumatico Blocco logico elettrico Elettrovalvole Vengono anche dette valvole a solenoide o valvole elettromagnetiche
ELETTROPNEUMATICA Un comando elettropneumatico è un automatismo con: Blocco di attuazione pneumatico Blocco logico elettrico Elettrovalvole Vengono anche dette valvole a solenoide o valvole elettromagnetiche
PRISMA di Longo F. e C. S.a.s.
 Le informazioni contenute nel presente manuale sono di proprietà esclusiva della PRISMA di Longo F. e C. S.a.s. 1 DESCRIZIONE GENERALE DELLA MACCHINA Questa macchina, unica nel suo genere, è stata progettata
Le informazioni contenute nel presente manuale sono di proprietà esclusiva della PRISMA di Longo F. e C. S.a.s. 1 DESCRIZIONE GENERALE DELLA MACCHINA Questa macchina, unica nel suo genere, è stata progettata
Fresatrici. Macchine per la lavorazione di profili in alluminio e in PVC. Macchine interamente progettate e costruite in Italia
 Fresatrici Macchine per la lavorazione di profili in alluminio e in PVC Macchine interamente progettate e costruite in Italia L AZIENDA Pertici Industries è stata fondata nel 1965 da Leto Pertici con il
Fresatrici Macchine per la lavorazione di profili in alluminio e in PVC Macchine interamente progettate e costruite in Italia L AZIENDA Pertici Industries è stata fondata nel 1965 da Leto Pertici con il
Controlli Automatici Elementi base Ing. F.Criseo
 1. Pneumatica - Meccanica Elettropneumatica 2. Attuatori: (esempio cilindri pneumatici) 3. Sensori: di posizione, di spostamento 4. Sistemi di comando: esempio valvole 5. Elementi in un sistema pneumatico
1. Pneumatica - Meccanica Elettropneumatica 2. Attuatori: (esempio cilindri pneumatici) 3. Sensori: di posizione, di spostamento 4. Sistemi di comando: esempio valvole 5. Elementi in un sistema pneumatico
I. P. S. I. A. " P. A. FIOCCHI " via Belfiore N Lecco CORSO "PROGETTO 92'' MONOENNIO ELETTRICO. Classe: 3 OP.ELE. sez. B ALUNNO... Data...
 1 I. P. S. I. A. " P. A. FIOCCHI " via Belfiore N 4 22053 Lecco CORSO "PROGETTO 92'' MONOENNIO ELETTRICO. Classe: 3 OP.ELE. sez. B ALUNNO... Data... OGGETTO : PROVA INTEGRATA DI : ELETTROTECNICA Prof.Ezio
1 I. P. S. I. A. " P. A. FIOCCHI " via Belfiore N 4 22053 Lecco CORSO "PROGETTO 92'' MONOENNIO ELETTRICO. Classe: 3 OP.ELE. sez. B ALUNNO... Data... OGGETTO : PROVA INTEGRATA DI : ELETTROTECNICA Prof.Ezio
La piattaforma per la robotica educativa VEX IQ è pensata per gli studenti a partire dalla scuola primaria. Si adatta sia a studenti alle prime armi
 La piattaforma per la robotica educativa VEX IQ è pensata per gli studenti a partire dalla scuola primaria. Si adatta sia a studenti alle prime armi che sperimentano un linguaggio di programmazione a blocchi
La piattaforma per la robotica educativa VEX IQ è pensata per gli studenti a partire dalla scuola primaria. Si adatta sia a studenti alle prime armi che sperimentano un linguaggio di programmazione a blocchi
Esami di stato a.s. 2007/2008
 Esami di stato a.s. 2007/2008 Progetto realizzato dagli alunni: Mirra Luca, Ornaghi Jonathan, Ripamonti Ermes Docenti responsabili: Prof.ri P. Franzosa, G. Rizzaro I.T.I.S. P. Hensemberger Classe V, corso
Esami di stato a.s. 2007/2008 Progetto realizzato dagli alunni: Mirra Luca, Ornaghi Jonathan, Ripamonti Ermes Docenti responsabili: Prof.ri P. Franzosa, G. Rizzaro I.T.I.S. P. Hensemberger Classe V, corso
Salute e sicurezza nei luoghi di lavoro D.Lgs. 81/2008 TITOLO III Capo I USO DELLE ATTREZZATURE DI LAVORO
 Lo scopo delle direttive comunitarie recepite con il D.Lgs. 17/2010 è quello di creare le condizioni necessarie affinchè le industrie che operano nell ambito dell Unione Europea (U.E.) possano realizzare
Lo scopo delle direttive comunitarie recepite con il D.Lgs. 17/2010 è quello di creare le condizioni necessarie affinchè le industrie che operano nell ambito dell Unione Europea (U.E.) possano realizzare
MULTILIFT SELECT 6+1. Dimensioni pressa: Peso di movimentazione: 6 kg sull asse principale 1 kg sull asse secondario
 MULTILIFT SELECT 6+1 Dimensioni pressa: 270-570 Peso di movimentazione: 6 kg sull asse principale 1 kg sull asse secondario QUOTE PER L INSTALLAZIONE MULTILIFT SELECT 6+1 Corsa asse X 480 min. 220 min.
MULTILIFT SELECT 6+1 Dimensioni pressa: 270-570 Peso di movimentazione: 6 kg sull asse principale 1 kg sull asse secondario QUOTE PER L INSTALLAZIONE MULTILIFT SELECT 6+1 Corsa asse X 480 min. 220 min.
METTIFALDA A COLONNA
 PALLETTIZZAZIONE METTIFALDA Solaut produce posizionatori di interfalde per singola baia di pallettizzazione oppure sistemi che posizionano l interfalda, prelevata da un unico magazzino, su più stazioni
PALLETTIZZAZIONE METTIFALDA Solaut produce posizionatori di interfalde per singola baia di pallettizzazione oppure sistemi che posizionano l interfalda, prelevata da un unico magazzino, su più stazioni
ARRESTI DI EMERGENZA
 ARRESTI DI EMERGENZA Comando di emergenza Quando si verifica una anomalia durante il funzionamento di una macchina che può essere pericolosa per gli operatori o per le attrezzature in genere, è opportuno
ARRESTI DI EMERGENZA Comando di emergenza Quando si verifica una anomalia durante il funzionamento di una macchina che può essere pericolosa per gli operatori o per le attrezzature in genere, è opportuno
Circuiti elettropneumatici a relè
 Circuiti elettropneumatici a relè Circuiti a relè Il relè è costituito da un elettromagnete (nucleo con bobina), da una armatura mobile (ancora) posta ad un'estremità del nucleo e mantenuta distante dal
Circuiti elettropneumatici a relè Circuiti a relè Il relè è costituito da un elettromagnete (nucleo con bobina), da una armatura mobile (ancora) posta ad un'estremità del nucleo e mantenuta distante dal
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
MASSAGGIATRICI AUTOMATICHE SOTTOVUOTO
 MASSAGGIATRICI AUTOMATICHE SOTTOVUOTO La nostra gamma di massaggiatrici automatiche sottovuoto comprende modelli con capacità di carico di 500, 1200, 2000, 3000, 4000 kg. circa. Questi modelli sono utilizzati
MASSAGGIATRICI AUTOMATICHE SOTTOVUOTO La nostra gamma di massaggiatrici automatiche sottovuoto comprende modelli con capacità di carico di 500, 1200, 2000, 3000, 4000 kg. circa. Questi modelli sono utilizzati
SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato
 SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato Automazione industriale 1- Disegnare lo schema di un semplice alimentatore di tensione continua da 24 volt mettendo in evidenza
SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato Automazione industriale 1- Disegnare lo schema di un semplice alimentatore di tensione continua da 24 volt mettendo in evidenza
25 Comandi elettrici d emergenza
 25 Comandi elettrici d emergenza 1. Cicli di un solo attuatore Fig. 1. Comando elettrico d emergenza del ciclo A A con arresto e ritorno immediato in posizione di riposo. Un comando d emergenza si deve
25 Comandi elettrici d emergenza 1. Cicli di un solo attuatore Fig. 1. Comando elettrico d emergenza del ciclo A A con arresto e ritorno immediato in posizione di riposo. Un comando d emergenza si deve
Robot Escape scatola di montaggio. Presentazione del produttore. Attrezzi necessari per la costruzione del robot Escape:
 105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
105.663 Robot Escape scatola di montaggio Presentazione del produttore Il robot Escape (robot mobile) funziona come un robot con intelligenza artificiale. Riesce a trovare sempre una via d'uscita dal labirinto.
Introduzione alla programmazione
 Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Programma di produzione
 IT Programma di produzione Già nel 1968 Renato Cividini è attivo nella sua officina di Curnasco di Treviolo (Bg), ben presto assistito dai figli, Fausto e Giacomo. Nel 1991 Fausto e Giacomo Cividini, fondano
IT Programma di produzione Già nel 1968 Renato Cividini è attivo nella sua officina di Curnasco di Treviolo (Bg), ben presto assistito dai figli, Fausto e Giacomo. Nel 1991 Fausto e Giacomo Cividini, fondano
Progettazione Funzionale di Sistemi Meccanici e Meccatronici Progetto del sistema di movimentazione di una pinza con meccanismi a camme
 Progettazione funzionale di sistemi Meccanici e Meccatronici. Camme A.A. 2017/2018 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Progetto del sistema di movimentazione di una pinza con meccanismi
Progettazione funzionale di sistemi Meccanici e Meccatronici. Camme A.A. 2017/2018 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Progetto del sistema di movimentazione di una pinza con meccanismi
Esercitazioni Corso Automazione a fluido ESERCITAZIONE N4
 ESERCITAZIONE N4 Realizzare lo schema pneumatico di figura 1 comandato mediante azionamento elettrico secondo lo schema di figura 2. In questo schema si realizza la sequenza D+/D-C+/D+/D- C-. Dello schema
ESERCITAZIONE N4 Realizzare lo schema pneumatico di figura 1 comandato mediante azionamento elettrico secondo lo schema di figura 2. In questo schema si realizza la sequenza D+/D-C+/D+/D- C-. Dello schema
MULTILIFT SELECT 6. Dimensioni pressa: Peso di movimentazione: 6 kg
 MULTILIFT SELECT 6 Dimensioni pressa: 270-570 Peso di movimentazione: 6 kg DATI TECNICI MULTILIFT SELECT 6 Corsa asse X min. 100 Corsa asse Z Superficie di staffaggio della piastra portastampo fissa 225
MULTILIFT SELECT 6 Dimensioni pressa: 270-570 Peso di movimentazione: 6 kg DATI TECNICI MULTILIFT SELECT 6 Corsa asse X min. 100 Corsa asse Z Superficie di staffaggio della piastra portastampo fissa 225
Passo vite da 5 a 50 mm / rev 5 taglie differenti
 Attuatori a vite ET Elettrocilindri Per motion, posizionamento, settaggio ed avviamento precisi, l attuatore a vite ET offre: Corse fino a 2400 mm 44500 N Ripetibilità ± 0.07 mm (fino a ± 0.01 mm) Velocità
Attuatori a vite ET Elettrocilindri Per motion, posizionamento, settaggio ed avviamento precisi, l attuatore a vite ET offre: Corse fino a 2400 mm 44500 N Ripetibilità ± 0.07 mm (fino a ± 0.01 mm) Velocità
PLC. PROGRAMMABLE LOGIC CONTROLLER 2a parte CON RIFERIMENTO ALLE CPU SIEMENS ST 200 ED AL SW STEP 7 MICRO/WIN 32
 PLC PROGRAMMABLE LOGIC CONTROLLER 2a parte CON RIFERIMENTO ALLE CPU SIEMENS ST 200 ED AL SW STEP 7 MICRO/WIN 32 SOFTWARE DI PROGRAMMAZIONE NORMATIVA IEC1131-3 - 1993 SCHEMI SEQUENZIALI FUNZIONALI (SFC)
PLC PROGRAMMABLE LOGIC CONTROLLER 2a parte CON RIFERIMENTO ALLE CPU SIEMENS ST 200 ED AL SW STEP 7 MICRO/WIN 32 SOFTWARE DI PROGRAMMAZIONE NORMATIVA IEC1131-3 - 1993 SCHEMI SEQUENZIALI FUNZIONALI (SFC)
DISCIPLINA: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI CLASSE DI CONCORSO: A035 - C270
 A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
MULTILIFT SELECT 15. Dimensioni pressa: Peso di movimentazione: 15 kg
 MULTILIFT SELECT 15 Dimensioni pressa: 570-970 Peso di movimentazione: 15 kg DATI TECNICI MULTILIFT SELECT 15 min. 180 Corsa asse Z Corsa asse X Superficie di staffaggio della piastra portastampo fissa
MULTILIFT SELECT 15 Dimensioni pressa: 570-970 Peso di movimentazione: 15 kg DATI TECNICI MULTILIFT SELECT 15 min. 180 Corsa asse Z Corsa asse X Superficie di staffaggio della piastra portastampo fissa
Introduzione alle macchine a stati (non definitivo)
") Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
Introduzione alle macchine a stati (non definitivo) - Introduzione Il modo migliore per affrontare un problema di automazione industriale (anche non particolarmente complesso) consiste nel dividerlo in
Progettazione meccanica: dalla scelta dei componenti di base alla realizzazione del sistema cartesiano completo. Andrea Piatti Bosch Rexroth S.p.A.
 Progettazione meccanica: dalla scelta dei componenti di base alla realizzazione del sistema cartesiano completo Andrea Piatti Bosch Rexroth S.p.A. Meccatronica Livello di performance Molto elevato Macchine
Progettazione meccanica: dalla scelta dei componenti di base alla realizzazione del sistema cartesiano completo Andrea Piatti Bosch Rexroth S.p.A. Meccatronica Livello di performance Molto elevato Macchine
MULTILIFT V 15. Dimensioni pressa: Peso di movimentazione: 15 kg
 MULTILIFT V 15 Dimensioni pressa: 370-920 Peso di movimentazione: 15 kg DATI TECNICI MULTILIFT V 15 F Corsa asse X 3) Corsa asse Z 1) Superficie di staffaggio della piastra portastampo fissa E A K 5) Corsa
MULTILIFT V 15 Dimensioni pressa: 370-920 Peso di movimentazione: 15 kg DATI TECNICI MULTILIFT V 15 F Corsa asse X 3) Corsa asse Z 1) Superficie di staffaggio della piastra portastampo fissa E A K 5) Corsa
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITÀ FORMATIVA DISCIPLINARE: N. 1. Titolo: Qualità e Controlli OBIETTIVI
 ANNO QUINTO INDIRIZZO di manutenzione ed assistenza tecnica OPZIONE di apparati ed impianti tecnici civili ed industriali CURVATURA elettrica MATERIA: Tecnologie meccaniche ed applicazioni UNITÀ FORMATIVA
ANNO QUINTO INDIRIZZO di manutenzione ed assistenza tecnica OPZIONE di apparati ed impianti tecnici civili ed industriali CURVATURA elettrica MATERIA: Tecnologie meccaniche ed applicazioni UNITÀ FORMATIVA
SEGATRICI. A nastro (con o senza avanzamento automatico del pezzo) Alternative (con o senza avanzamento automatico del pezzo) Troncatrici
 Alternative (con o senza avanzamento automatico del pezzo) Troncatrici") SEGATRICI Tipologia: A nastro (con o senza avanzamento automatico del pezzo) Alternative (con o senza avanzamento automatico del pezzo) Troncatrici Norme di riferimento UNI EN 953/00 ripari di protezione
SEGATRICI Tipologia: A nastro (con o senza avanzamento automatico del pezzo) Alternative (con o senza avanzamento automatico del pezzo) Troncatrici Norme di riferimento UNI EN 953/00 ripari di protezione
Progettazione curricolo verticale percorso formativo per Unità di Apprendimento (UDA)
") Progettazione curricolo verticale percorso formativo per Unità di Apprendimento (UDA) Dipartimento di MECCANICA MECCATRONICA ED ENERGIA L asse scientifico-tecnologico Allegato1 DM 139/2007 Secondo Biennio:
Progettazione curricolo verticale percorso formativo per Unità di Apprendimento (UDA) Dipartimento di MECCANICA MECCATRONICA ED ENERGIA L asse scientifico-tecnologico Allegato1 DM 139/2007 Secondo Biennio:
PINZE ELETTRONICHE PARALLELE SERIE EGS
 PARALLELE SERIE EGS KipEGS.pdf Edizione 12-00 Caratteristiche Le pinze elettroniche della serie EGS sono state progettate per applicazioni con requisiti elevati, soprattutto in termini di flessibilità.
PARALLELE SERIE EGS KipEGS.pdf Edizione 12-00 Caratteristiche Le pinze elettroniche della serie EGS sono state progettate per applicazioni con requisiti elevati, soprattutto in termini di flessibilità.
CLASSE 3 ELETTRICO ESERCITAZIONI DI PLC
 CLASSE 3 ELETTRICO ESERCITAZIONI DI PLC Anno Formativo 2014/2015 Generalità Il software che utilizziamo per le esercitazioni in classe è una versione demo liberamente scaricabile dal seguente link: https://emiliogiomocfpfonte.wordpress.com/link/
CLASSE 3 ELETTRICO ESERCITAZIONI DI PLC Anno Formativo 2014/2015 Generalità Il software che utilizziamo per le esercitazioni in classe è una versione demo liberamente scaricabile dal seguente link: https://emiliogiomocfpfonte.wordpress.com/link/
Indice. Prefazione... Applicazioni della tecnologia di automazione. Concetti di base di pneumatica. Generazione e distribuzione dell aria compressa
 Prefazione... XV Capitolo 1 Applicazioni della tecnologia di automazione 1.1 Panoramica... 1 1.2 Caratteristiche della pneumatica... 2 1.2.1 Criteri per la scelta delle fonti di energia per produrre il
Prefazione... XV Capitolo 1 Applicazioni della tecnologia di automazione 1.1 Panoramica... 1 1.2 Caratteristiche della pneumatica... 2 1.2.1 Criteri per la scelta delle fonti di energia per produrre il
-V- Novità. -H- Attenzione Software di dimensionamento Selezione pinze Pinze angolari HGWC Caratteristiche
 Caratteristiche Dati generali Informazioni generali La pinza angolare, compatta e conveniente, è costituita da due semi-gusci simmetrici speculari in pressofusione di zinco. La forza impressa dal movimento
Caratteristiche Dati generali Informazioni generali La pinza angolare, compatta e conveniente, è costituita da due semi-gusci simmetrici speculari in pressofusione di zinco. La forza impressa dal movimento
Operazioni logiche e diagrammi funzionali dei circuiti automatici
 Operazioni logiche e diagrammi funzionali dei circuiti automatici Strutture dei controlli digitali Le unità di governo utilizzate nei sistemi automatici digitali operano secondo procedure riconducibili
Operazioni logiche e diagrammi funzionali dei circuiti automatici Strutture dei controlli digitali Le unità di governo utilizzate nei sistemi automatici digitali operano secondo procedure riconducibili
Il codice a barre si può definire come una simbologia appositamente formulata per la codifica di informazioni in modo tale che queste ultime possono
 Il codice a barre si può definire come una simbologia appositamente formulata per la codifica di informazioni in modo tale che queste ultime possono essere acquisite in modo automatico. È uno dei sistemi
Il codice a barre si può definire come una simbologia appositamente formulata per la codifica di informazioni in modo tale che queste ultime possono essere acquisite in modo automatico. È uno dei sistemi
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 SETTORE MECCANICA; PRODUZIONE E MANUTENZIONE DI MACCHINE; IMPIANTISTICA Processo Lavorazioni Meccaniche
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 SETTORE MECCANICA; PRODUZIONE E MANUTENZIONE DI MACCHINE; IMPIANTISTICA Processo Lavorazioni Meccaniche
ESERCIZI PLC COL LINGUAGGIO BASIC
 ESERCIZI PLC COL LINGUAGGIO BASIC ESERCIZIO 7: dispositivo di marcatura per tre livelli di qualità Al termine del controllo di qualità, l operatore pone sul pezzo controllato il marchio di qualità Q 1,
ESERCIZI PLC COL LINGUAGGIO BASIC ESERCIZIO 7: dispositivo di marcatura per tre livelli di qualità Al termine del controllo di qualità, l operatore pone sul pezzo controllato il marchio di qualità Q 1,
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA QUALIFICAZIONE PROFESSIONALE Denominazione qualificazione Operatore tornitura 3 Settore Economico Professionale Area di Attività Processo
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA QUALIFICAZIONE PROFESSIONALE Denominazione qualificazione Operatore tornitura 3 Settore Economico Professionale Area di Attività Processo
C-GAMMA LABORATORIO FOTOMETRICO
 Descrizione generale Il mod. è un sistema completo per la caratterizzazione luminosa di componenti ottici di uso civile ed industriale. Esso consente la misura di qualsiasi tipologia di apparecchio di
Descrizione generale Il mod. è un sistema completo per la caratterizzazione luminosa di componenti ottici di uso civile ed industriale. Esso consente la misura di qualsiasi tipologia di apparecchio di
IMPIANTO MONTAUTO A COLONNE Modello DUO BOX Mod. PBC1 con persona a bordo DESCRIZIONE IMPIANTO
 DESCRIZIONE IMPIANTO Elevatore per auto a comando elettrico con movimentazioni oleodinamiche per traslazione di autovetture tra piani definiti a colonne CON PERSONA A BORDO costituito da: Un sistema di
DESCRIZIONE IMPIANTO Elevatore per auto a comando elettrico con movimentazioni oleodinamiche per traslazione di autovetture tra piani definiti a colonne CON PERSONA A BORDO costituito da: Un sistema di
INTEGRALPICKER V. Dimensioni pressa: Peso di movimentazione: 1 kg
 INTEGRALPICKER V Dimensioni pressa: 270-570 Peso di movimentazione: 1 kg DATI TECNICI INTEGRALPICKER V Corsa asse X F Corsa asse Y Superficie di staffaggio piastra portastampo fissa H A K D C B 135 G P
INTEGRALPICKER V Dimensioni pressa: 270-570 Peso di movimentazione: 1 kg DATI TECNICI INTEGRALPICKER V Corsa asse X F Corsa asse Y Superficie di staffaggio piastra portastampo fissa H A K D C B 135 G P
AUTOMAZIONE INDUSTRIALE. 19 dicembre Cognome Nome Matricola Corso integrato
 AUTOMAZIONE INDUSTRIALE 19 dicembre 14 Cognome Nome Matricola Corso integrato SI NO Verificare che il fascicolo sia costituito da 6 pagine. Scrivere le risposte negli appositi spazi sotto ogni domanda.
AUTOMAZIONE INDUSTRIALE 19 dicembre 14 Cognome Nome Matricola Corso integrato SI NO Verificare che il fascicolo sia costituito da 6 pagine. Scrivere le risposte negli appositi spazi sotto ogni domanda.
METTIFOGLIO A COLONNA ACRAB-C
 CARICATORI FOGLI Apiel produce tre famiglie di prodotti utilizzati per il posizionamento di fogli in carta, cartone, plastica o metallo sopra il tavoli di lavoro di macchine per lavorazioni successive.
CARICATORI FOGLI Apiel produce tre famiglie di prodotti utilizzati per il posizionamento di fogli in carta, cartone, plastica o metallo sopra il tavoli di lavoro di macchine per lavorazioni successive.
BROWN SN 255 SEGATRICE MANUALE
 BROWN SN 255 SEGATRICE MANUALE Morsa con lardone registrabile Ampia capacità di taglio fino a 60 Eccentrico per regolare la perpendicolarità dell archetto Gruppo tensionamento nastro 220 160 90 220 120
BROWN SN 255 SEGATRICE MANUALE Morsa con lardone registrabile Ampia capacità di taglio fino a 60 Eccentrico per regolare la perpendicolarità dell archetto Gruppo tensionamento nastro 220 160 90 220 120
Tema E: TECNOLOGIE MECCANICHE TEMA E: TECNOLOGIE MECCANICHE
 Tema E: TECNOLOGIE MECCANICHE TEMA E: TECNOLOGIE MECCANICHE LE MACCHINE Segatrice a nastro 5 assi Max 200mm di spessore taglio Acqua+sabbia Taglio a getto d acqua Taglio con lama Morsa a sostegno EDM Filo
Tema E: TECNOLOGIE MECCANICHE TEMA E: TECNOLOGIE MECCANICHE LE MACCHINE Segatrice a nastro 5 assi Max 200mm di spessore taglio Acqua+sabbia Taglio a getto d acqua Taglio con lama Morsa a sostegno EDM Filo
SIMBOLO ELETTRICO. K1 contatti. bobina RELÈ
 DEFINIZIONE È un apparecchio di comando con uno o più contatti elettrici che vengono azionati per mezzo di un elettromagnete quando la bobina dello stesso viene percorsa da corrente ( eccitata ). SIMBOLO
DEFINIZIONE È un apparecchio di comando con uno o più contatti elettrici che vengono azionati per mezzo di un elettromagnete quando la bobina dello stesso viene percorsa da corrente ( eccitata ). SIMBOLO
PROGRAMMAZIONE DIDATTICA Dipartimento Elettrico - Elettronico LABORATORI TECNOLOGICI ED ESERCITAZIONI
 Progettazione Disciplinare PROGRAMMAZIONE DIDATTICA Dipartimento Elettrico - Elettronico LABORATORI TECNOLOGICI ED ESERCITAZIONI CLASSE 3DME pag. 1 di 7 Progettazione Disciplinare MODULO 1 : NORME DI RAPPRESENTAZIONE
Progettazione Disciplinare PROGRAMMAZIONE DIDATTICA Dipartimento Elettrico - Elettronico LABORATORI TECNOLOGICI ED ESERCITAZIONI CLASSE 3DME pag. 1 di 7 Progettazione Disciplinare MODULO 1 : NORME DI RAPPRESENTAZIONE
Micro-pinze parallele HGPM
 A07_04_001_E-HGPM! Miniaturizzate e facili da montare! Versatili e disponibili in diverse varianti 2007/03 Con riserva di modifiche Prodotti 2007 1/-1 A07_04_002_F-HGPM Caratteristiche G6: G7: G9: Con
A07_04_001_E-HGPM! Miniaturizzate e facili da montare! Versatili e disponibili in diverse varianti 2007/03 Con riserva di modifiche Prodotti 2007 1/-1 A07_04_002_F-HGPM Caratteristiche G6: G7: G9: Con
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 6 PLC SFC Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A. L. Cologni 1 Esercizio 1 Si consideri un sistema di trasporto
Corso di Automazione industriale Lezione 6 PLC SFC Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A. L. Cologni 1 Esercizio 1 Si consideri un sistema di trasporto
KipAPPL.pdf Edizione 12-00. ➀ = ULS 160, ➁ = RCH, ➂ = Pinza RP 17
 KipAPPL.pdf Edizione 12-00 CARICO E SCARICO DI PEZZI FUSI DI OTTONE Diversi pezzi fusi di ottone vengono caricati e scaricati dalle macchine utensili e quindi disposti su pallet. Diversi tipi di pezzi
KipAPPL.pdf Edizione 12-00 CARICO E SCARICO DI PEZZI FUSI DI OTTONE Diversi pezzi fusi di ottone vengono caricati e scaricati dalle macchine utensili e quindi disposti su pallet. Diversi tipi di pezzi
PROGRAMMAZIONE DIDATTICA DIPARTIMENTO ELETTRICO ELETTRONICO
 Progettazione Disciplinare PROGRAMMAZIONE DIDATTICA DIPARTIMENTO ELETTRICO ELETTRONICO TECNOLOGIE E TECNICHE DI RAPPRESENTAZIONE GRAFICA CLASSE 2 DM ANNO SCOLASTICO 2016/2017 pag. 1 di 5 Progettazione
Progettazione Disciplinare PROGRAMMAZIONE DIDATTICA DIPARTIMENTO ELETTRICO ELETTRONICO TECNOLOGIE E TECNICHE DI RAPPRESENTAZIONE GRAFICA CLASSE 2 DM ANNO SCOLASTICO 2016/2017 pag. 1 di 5 Progettazione
Rubriche valutative. Dalla Scuola Primaria alla Secondaria di primo grado. Istituto Comprensivo Sturla
 Istituto Comprensivo Sturla POLO DELLA REGIONE LIGURIA PER LA SCUOLA IN OSPEDALE Via Vittorino Era, 1/B - 16147 - G E N O V A (010) 38.75.04 - Fax (010) 30.71.038 E-mail: geic860009@istruzione.it Sito
Istituto Comprensivo Sturla POLO DELLA REGIONE LIGURIA PER LA SCUOLA IN OSPEDALE Via Vittorino Era, 1/B - 16147 - G E N O V A (010) 38.75.04 - Fax (010) 30.71.038 E-mail: geic860009@istruzione.it Sito
MSE 2. Modulo di processo ad alto rendimento per giunti di collegamento a vite
 MSE 2 Modulo di processo ad alto rendimento per giunti di collegamento a vite Massima dinamicità, compattezza, impiego universale Il modulo di processo MSE brevettato per giunti di collegamento a vite
MSE 2 Modulo di processo ad alto rendimento per giunti di collegamento a vite Massima dinamicità, compattezza, impiego universale Il modulo di processo MSE brevettato per giunti di collegamento a vite
Attuatore elettrico. Novità RoHS. Profilo ribassato/basso centro di gravità. Serie LEJ. Cilindro senza stelo. Alta rigidità
 Attuatore elettrico 90 Alta rigidità LJH Cilindro senza stelo Profilo ribassato/basso centro di gravità Altezza ridotta di circa 3% (Riduzione di mm) 5 LEJS Serie Novità LEJS (Modello attuale) LJH Carico
Attuatore elettrico 90 Alta rigidità LJH Cilindro senza stelo Profilo ribassato/basso centro di gravità Altezza ridotta di circa 3% (Riduzione di mm) 5 LEJS Serie Novità LEJS (Modello attuale) LJH Carico
ISTITUTO COMPRENSIVO DI MANZANO PROVA DI TECNOLOGIA. Scuola Primaria. Anno Scolastico. Classe quinta. Alunno/a Scuola Sez.
 ISTITUTO COMPRENSIVO DI MANZANO PROVA DI TECNOLOGIA Scuola Primaria Anno Scolastico Classe quinta Alunno/a Scuola Sez. Istituto Comprensivo di Manzano - Prova di TECNOLOGIA - a.s. 2015/2016 PRIMO COMPITO
ISTITUTO COMPRENSIVO DI MANZANO PROVA DI TECNOLOGIA Scuola Primaria Anno Scolastico Classe quinta Alunno/a Scuola Sez. Istituto Comprensivo di Manzano - Prova di TECNOLOGIA - a.s. 2015/2016 PRIMO COMPITO
Laboratorio Logistica e Trasporti per le Scuole Superiori
 Laboratorio Logistica e Trasporti per le Scuole Superiori OBIETTIVI E FINALITÀ DELLA SOLUZIONE La logistica ed il trasporto, hanno avuto e continueranno ad avere un ruolo strategico in tutti i Paesi del
Laboratorio Logistica e Trasporti per le Scuole Superiori OBIETTIVI E FINALITÀ DELLA SOLUZIONE La logistica ed il trasporto, hanno avuto e continueranno ad avere un ruolo strategico in tutti i Paesi del
ALFA. Aeffe Machinery Srl Via Marco Polo Bientina (PI) Italy Tel :
 Italy Tel :") ALFA Trattasi di centro di lavoro a controllo numerico espressamente studiato per taglio, punzonatura e fresatura, lavorazione su pellami, fresatura ed incisione ecc. La macchina, realizzata appositamente
ALFA Trattasi di centro di lavoro a controllo numerico espressamente studiato per taglio, punzonatura e fresatura, lavorazione su pellami, fresatura ed incisione ecc. La macchina, realizzata appositamente
CENTRO DI TORNITURA E FRESATURA ML 1000
 CENTRO DI TORNITURA E FRESATURA ML 1000 Indice 1. Dati tecnici 2. Descrizione tecnica 1. DATI TECNICI Diametro tornibile mm 1100 Diametro volteggiabile mm 1300 Altezza d albero minima per carico/scarico
CENTRO DI TORNITURA E FRESATURA ML 1000 Indice 1. Dati tecnici 2. Descrizione tecnica 1. DATI TECNICI Diametro tornibile mm 1100 Diametro volteggiabile mm 1300 Altezza d albero minima per carico/scarico
MULTILIFT SELECT 25. Dimensioni pressa: Peso di movimentazione: 25 kg
 MULTILIFT SELECT 25 Dimensioni pressa: 630-920 Peso di movimentazione: 25 kg DATI TECNICI MULTILIFT SELECT 25 min. 170 Corsa asse Z Corsa asse X E Superficie di staffaggio della piastra portastampo fissa
MULTILIFT SELECT 25 Dimensioni pressa: 630-920 Peso di movimentazione: 25 kg DATI TECNICI MULTILIFT SELECT 25 min. 170 Corsa asse Z Corsa asse X E Superficie di staffaggio della piastra portastampo fissa
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
ISTITUTO COMPRENSIVO DI SCUOLA MATERNA ELEMENTARE E MEDIA DI BISUSCHIO
 ISTITUTO COMPRENSIVO DI SCUOLA MATERNA ELEMENTARE E MEDIA DI BISUSCHIO Anno scolastico 2010/2011 CURRICULUM DI D ISTITUTO SCUOLA DELL INFANZIA OBIETTIVI DI APPRENDIMENTO Utilizzare criteri e relazioni
ISTITUTO COMPRENSIVO DI SCUOLA MATERNA ELEMENTARE E MEDIA DI BISUSCHIO Anno scolastico 2010/2011 CURRICULUM DI D ISTITUTO SCUOLA DELL INFANZIA OBIETTIVI DI APPRENDIMENTO Utilizzare criteri e relazioni
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 8 PLC Testo strutturato Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A. L. Cologni 1 Esercizio 1 Si consideri un sistema
Corso di Automazione industriale Lezione 8 PLC Testo strutturato Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A. L. Cologni 1 Esercizio 1 Si consideri un sistema
Disegno di Macchine. corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 14 I processi di lavorazione per compone nti meccanici. Cenni sulle lavorazioni per asportazione
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 14 I processi di lavorazione per compone nti meccanici. Cenni sulle lavorazioni per asportazione
PINZE PER PALLETTIZZAZIONE
 PINZE PER PALLETTIZZAZIONE Apiel produce pinze per pallettizzatori e per incartonatrici. PINZE PER PALLETTIZZAZIONE Pinza autocentrante 400 con ganci presa bancale Pinza con una patta fissa ed una mobile
PINZE PER PALLETTIZZAZIONE Apiel produce pinze per pallettizzatori e per incartonatrici. PINZE PER PALLETTIZZAZIONE Pinza autocentrante 400 con ganci presa bancale Pinza con una patta fissa ed una mobile
ROBOCUP JR ITALIA RIVA DEL GARDA
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
ENSORI SENSORI. Reed - Effetto di Hall Modelli DSM - DCB - DSL Staffe per fissaggio
 606_102-112 Sensori* 18-10-2004 18:30 Pagina 102 102 S ENSORI Reed - Effetto di Hall Modelli DSM - DCB - DSL Staffe per fissaggio I sensori magnetici sono rilevatori elettronici che reagiscono alla presenza
606_102-112 Sensori* 18-10-2004 18:30 Pagina 102 102 S ENSORI Reed - Effetto di Hall Modelli DSM - DCB - DSL Staffe per fissaggio I sensori magnetici sono rilevatori elettronici che reagiscono alla presenza
Corso di Automazione industriale
 Corso di Automazione industriale ezione 4 PC adder Esercizi niversità degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A.. Cologni 1 Esercizio 1 Si consideri un sistema di trasporto di
Corso di Automazione industriale ezione 4 PC adder Esercizi niversità degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A.. Cologni 1 Esercizio 1 Si consideri un sistema di trasporto di
Corso di Automazione industriale
 Corso di Automazione industriale ezione 4 PC adder Esercizi niversità degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A.. Cologni 1 Esercizio 1 Si consideri un sistema di trasporto di
Corso di Automazione industriale ezione 4 PC adder Esercizi niversità degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A.. Cologni 1 Esercizio 1 Si consideri un sistema di trasporto di
DESCRITTORI AL TERMINE DELLA CLASSE TERZA
 DISCIPLINA: TECNOLOGIA PRIMARIA MACRO COMPETENZA OBIETTIVI DI APPRENDIMENTO DISCIPLINARI DESCRITTORI AL TERMINE DELLA CLASSE TERZA DESCRITTORI AL TERMINE DELLA CLASSE QUINTA TRAGUARDI PER LO SVILUPPO DELLE
DISCIPLINA: TECNOLOGIA PRIMARIA MACRO COMPETENZA OBIETTIVI DI APPRENDIMENTO DISCIPLINARI DESCRITTORI AL TERMINE DELLA CLASSE TERZA DESCRITTORI AL TERMINE DELLA CLASSE QUINTA TRAGUARDI PER LO SVILUPPO DELLE
OBBIETTIVO CONOSCERE:
 MODULO CONTENUTI OBBIETTIVO MEZZI METODI SPAZI VERIFICHE. Norma CEI 3-19 (Simboli per apparecchiature e dispositivi di comando e segnalazione). CONOSCERE: NORME E LEGGI Norma CEI 17-13 (Quadri elettrici
MODULO CONTENUTI OBBIETTIVO MEZZI METODI SPAZI VERIFICHE. Norma CEI 3-19 (Simboli per apparecchiature e dispositivi di comando e segnalazione). CONOSCERE: NORME E LEGGI Norma CEI 17-13 (Quadri elettrici
2 Porta automatica. 2.1 Caratteristiche richieste ad una porta automatica. Applicazioni
 2 Porta automatica Le porte a comando automatico trovano frequentemente impiego all ingresso di supermercati, edifici pubblici, banche, ospedali ecc. 2. Caratteristiche richieste ad una porta automatica
2 Porta automatica Le porte a comando automatico trovano frequentemente impiego all ingresso di supermercati, edifici pubblici, banche, ospedali ecc. 2. Caratteristiche richieste ad una porta automatica
TECNOLOGIA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA
 TECNOLOGIA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA L alunno riconosce e identifica nell ambiente che lo circonda elementi e fenomeni di tipo artificiale. È a conoscenza
TECNOLOGIA TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE AL TERMINE DELLA SCUOLA PRIMARIA L alunno riconosce e identifica nell ambiente che lo circonda elementi e fenomeni di tipo artificiale. È a conoscenza
Istituto Comprensivo di Pralboino Curricolo Verticale
 VEDERE, OSSERVARE e SPERIMENTARE L alunno riconosce nell ambiente che lo circonda i principali sistemi tecnologici e le molteplici relazioni che essi stabiliscono con gli esseri viventi e gli altri elementi
VEDERE, OSSERVARE e SPERIMENTARE L alunno riconosce nell ambiente che lo circonda i principali sistemi tecnologici e le molteplici relazioni che essi stabiliscono con gli esseri viventi e gli altri elementi
I.I.S.S. G. Marconi Bari. Istituto Tecnico settore Tecnologico :: Liceo Scientifico opzione Scienze applicate. Il Robot a scuola
 Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
RP RP 5 RP 10 RP 11 RP 12 RP 15 RP 17 RP 18 RP
 SERIE RP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIGNONE E CREMAGLIERA Kip2SCO.pdf Edizione 12-00 Caratteristiche Esecuzione compatta Costruzione robusta Elevata forza di
SERIE RP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIGNONE E CREMAGLIERA Kip2SCO.pdf Edizione 12-00 Caratteristiche Esecuzione compatta Costruzione robusta Elevata forza di
Dal 1983 Rayair Automation Ltd. fornisce soluzioni e servizi di automazione e meccatronica all industria maltese.
 ROBOTICA IN SALSA MALTESE Era il 1983 quando Ray Schembri creò Rayair Automation Ltd. per fornire all emergente industria maltese servizi di robotica e automazione. Missione compiuta: oggi l azienda è
ROBOTICA IN SALSA MALTESE Era il 1983 quando Ray Schembri creò Rayair Automation Ltd. per fornire all emergente industria maltese servizi di robotica e automazione. Missione compiuta: oggi l azienda è
CMM-3D BANCO PER IL CONTROLLO DIMENSIONALE
 Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Laboratorio di Sistemi e Automazione (A020-C320) esperienza competenze Competenze trasversali
 esperienza competenze Competenze trasversali") DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
Istituto Comprensivo
 CLASSE I - SCUOLA PRIMARIA ESPLORARE IL MONDO Distinguere e descrivere con le parole, rappresentare con i disegni e gli elementi del mondo artificiale sapendoli individuare e collocare nei diversi contesti.
CLASSE I - SCUOLA PRIMARIA ESPLORARE IL MONDO Distinguere e descrivere con le parole, rappresentare con i disegni e gli elementi del mondo artificiale sapendoli individuare e collocare nei diversi contesti.
SISTEMI PER L INDUSTRIA E PLC 10/01/18 Teoria, 30minuti, Minimo 4 punti su 12 di Programmazione
 SISTEMI PER L INDUSTRIA E PLC 10/01/18 Teoria, 30minuti, Minimo 4 punti su 12 di Programmazione 1) Illustrare brevemente le differenze tra PLC, Soft-PLC e Periferia (3 punti) 2) Dato un Timer TON, illustrare
SISTEMI PER L INDUSTRIA E PLC 10/01/18 Teoria, 30minuti, Minimo 4 punti su 12 di Programmazione 1) Illustrare brevemente le differenze tra PLC, Soft-PLC e Periferia (3 punti) 2) Dato un Timer TON, illustrare
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica
 PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
PECUP SECONDO BIENNIO terzo anno Meccanica, Meccatronica ed Energia - Articolazione: Meccanica e Meccatronica TECNOLOGIE MECCANICHE DI PROCESSO E DI PRODOTTO SECONDO BIENNIO MACRO-COMPETENZA: definire,
Competenze di ambito Prerequisiti Abilità / Capacità Conoscenze Livelli di competenza
 Docente: LASEN SERGIO Classe: 5AP Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE CIVILE E INDUSTRIALE_STRUTTURA E
Docente: LASEN SERGIO Classe: 5AP Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE CIVILE E INDUSTRIALE_STRUTTURA E
DOSSIER DELLE EVIDENZE. Anno Scolastico: 2018/ Classe: 3 Sezione:
 DOSSIER DELLE EVIDENZE ESAMI DI QUALIFICA PROFESSIONALE COMMISSIONE N. Anno Scolastico: 2018/2019 - Classe: 3 Sezione: CANDIDATO: nato a il [ ] INTERNO [ ] ESTERNO AMMISSIONE ALL ESAME DI QUALIFICA REGIONALE
DOSSIER DELLE EVIDENZE ESAMI DI QUALIFICA PROFESSIONALE COMMISSIONE N. Anno Scolastico: 2018/2019 - Classe: 3 Sezione: CANDIDATO: nato a il [ ] INTERNO [ ] ESTERNO AMMISSIONE ALL ESAME DI QUALIFICA REGIONALE
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA QUALIFICAZIONE PROFESSIONALE Denominazione qualificazione Operatore fresatura 3 Settore Economico Professionale Area di Attività Processo
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA QUALIFICAZIONE PROFESSIONALE Denominazione qualificazione Operatore fresatura 3 Settore Economico Professionale Area di Attività Processo
Istruzioni per aggiornare il cablaggio ROTAX DD2 evo
 Istruzioni per aggiornare il cablaggio ROTAX DD2 evo Motore DD2 versione 19/01/2016 rotaxmaxkart.it pagina 1 di 19 Informazione importante Con il cablaggio Rotax evo, non è più necessario staccare il polo
Istruzioni per aggiornare il cablaggio ROTAX DD2 evo Motore DD2 versione 19/01/2016 rotaxmaxkart.it pagina 1 di 19 Informazione importante Con il cablaggio Rotax evo, non è più necessario staccare il polo
T E C N O L O G I A CURRICULUM SCUOLA PRIMARIA E SECONDARIA. INTERVENIRE E TRASFORMARE C1 - Realizzare un oggetto in cartoncino.
 CURRICULUM SCUOLA PRIMARIA E SECONDARIA T E C N O L O G I A CLASSI PRIMARIA VEDERE E OSSERVARE A1 - Seguire istruzioni d uso per realizzare oggetti. O B I E T T I V I D I A P P R E N D I M E N T O PREVEDERE
CURRICULUM SCUOLA PRIMARIA E SECONDARIA T E C N O L O G I A CLASSI PRIMARIA VEDERE E OSSERVARE A1 - Seguire istruzioni d uso per realizzare oggetti. O B I E T T I V I D I A P P R E N D I M E N T O PREVEDERE
CALANDRE. A due rulli orizzontali e verticali A tre rulli orizzontali e verticali CNC
 CALANDRE Tipologia: A due rulli orizzontali e verticali A tre rulli orizzontali e verticali CNC Norme di riferimento UNI 10359/97 Calandre curvatrici - Verifiche geometriche UNI EN 294/93 e 349/94 distanze
CALANDRE Tipologia: A due rulli orizzontali e verticali A tre rulli orizzontali e verticali CNC Norme di riferimento UNI 10359/97 Calandre curvatrici - Verifiche geometriche UNI EN 294/93 e 349/94 distanze
SPIANATURA E RETTIFICA PUNTE
 - Varie configurazioni a scelta - Possibilità di installare fino a 5 stazioni - Carico automatico con manipolatore a 3 assi - Programmazione parametrica e di facile controllo - Sistema di arresto automatico
- Varie configurazioni a scelta - Possibilità di installare fino a 5 stazioni - Carico automatico con manipolatore a 3 assi - Programmazione parametrica e di facile controllo - Sistema di arresto automatico
ROBOTICA Syllabus Versione 1.0
 ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
sanguineti chiavari MOVIMENTAZIONI VARIE
 MOVIMENTAZIONI VARIE Svariate sono le movimentazione che Sanguineti Chiavari può fornire per ogni tipo di imbarcazione. Da quelle più classiche come alberotti e portelloni a quelle più particolari come
MOVIMENTAZIONI VARIE Svariate sono le movimentazione che Sanguineti Chiavari può fornire per ogni tipo di imbarcazione. Da quelle più classiche come alberotti e portelloni a quelle più particolari come
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 4 PLC Ladder Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2019/2020, A. Iapichino 1 Angelo Iapichino mail: angelo.iapichino@intellimech.it
Corso di Automazione industriale Lezione 4 PLC Ladder Esercizi Università degli Studi di Bergamo, Automazione Industriale, A.A. 2019/2020, A. Iapichino 1 Angelo Iapichino mail: angelo.iapichino@intellimech.it
La tecnologia di comunicazione ProfiNET
 La tecnologia di comunicazione ProfiNET Realizzazione di una macchina modulare per finishing e stampa di e5che6e adesive Ing. Davide Sabini Application Center Bologna Mail : davide.sabini@siemens.com Introduzione
La tecnologia di comunicazione ProfiNET Realizzazione di una macchina modulare per finishing e stampa di e5che6e adesive Ing. Davide Sabini Application Center Bologna Mail : davide.sabini@siemens.com Introduzione