Modellazione dei processi produttivi
|
|
|
- Gloria Frigerio
- 7 anni fa
- Visualizzazioni
Transcript

1 Sistemi DES Reti di Petri Equazione di stato Grafo di stato Strutture fondamentali Proprietà Analisi matriciale P-invarianti T-invarianti Sifoni Trappole Macchine a stati finiti Esempio di processo manifatturiero 1/93
2 Sequenziamento delle operazioni Supervisione dei sistemi Movimentazione AUTOMAZIONE INDUSTRIALE Avviamento Spegnimento Coordinamento dei sistemi Condizioni nominali Condizioni di emergenza Guasto Allarme 2/93
3 Derivano dai principi di conservazione della materia, dell energia, della q.tà di moto, del momento della q.tà di moto, etc. Sistema dinamico a tempo continuo Sistema dinamico a tempo discreto SISTEMA FISICO Sistema ad eventi discreti DES Sono descritti da variabili di stato Sono descritti da variabili funzioni del tempo 3/93
4 Spesso i sistemi fisici creati dall uomo non si riescono a modellare mediante sistemi dinamici poiché la variabile tempo limita notevolmente l analisi Sistemi manifatturieri Sistemi informativi Sistemi di comunicazione SISTEMI AD EVENTI DISCRETI Telefonia Variabili di stato Bus Valori simbolici invece che numerici Cambiano valore in modo ASINCRONO S.O. Apparente semplicità 4/93
5 SISTEMI DINAMICI Tempo dipendenti numerici sincrono diretti Non immediata Di difficile attuazione (enorme numero di combinazioni) Possibile perdita di vista a causa dell uso di modelli di astrazione matematica Variabili Valori delle variabili Flusso degli eventi Metodi di progetto Implementazione dei sistemi di controllo Completezza dell analisi Reale comprensione dei problemi di controllo del sistema DES Tempo indipendenti simbolici asincrono indiretti Tipicamente immediata (direttamente su codice di controllo a basso livello) Possibile senza dover contemplare tutte le situazioni Più vicini alle reali tecnologie realizzative Metodologie utili in vista delle applicazioni industriali 5/93
6 Processi Continui Batch Discreti Produzione dell energia Laminazione Processi chimici Sistemi di lavorazione Sistemi di assemblaggio Impianti idraulici Forni Sistemi di movimentaz. Distribuzione di gas 6/93


 modelli \"analitici\" a \"reti di code\" prima macchina calcolatrice")
7 Modellazione dei processi con sistemi ad eventi discreti Nell Ottocento Babbage concepisce il processo di trasformazione manifatturiera come un concatenarsi di eventi discreti cioè un sistema a eventi discreti C.Babbage Economy of manufacturers and machinery, 1832 gestione e il controllo delle operazioni Dagherrotipo di C. Babbage (F. Daguerre) modelli "analitici" a "reti di code" prima macchina calcolatrice programmabile descrizione stocastica dei fenomeni e delle interconnessioni 7/93
8 Reti di Petri Carl Adam Petri, 1962 strumento per la modellizzazione di processi ampia diffusione nel campo dell ingegneria elettronica e informatica modellazione di architetture di microprocessori Ajmone Marsan et al., 1994 applicazioni nell industria manifatturiera modellazione di Flexible Manufacturing System (FMS) Yan et al., 1998 modellazione di sistemi just-in-time Song & Lee, 1998 Reliability Modelling Schneeweiss /93
9 Nella descrizione di un processo (produttivo, organizzativo, ecc.) spesso si ha la necessità di rappresentare sottoprocessi o attività che possono essere eseguite contemporaneamente, in parallelo fra loro, ma non indipendentemente l una dall altra Potrebbe accadere che un determinato passaggio o una certa fase del processo non possa verificarsi o non possa essere attivata fintanto che altre fasi o attività non sono concluse o fino al verificarsi di determinate condizioni. situazioni di questo tipo non possono essere descritte mediante un diagramma di flusso le attività sono rigidamente serializzate Con le Reti di Petri la serializzazione degli step del procedimento viene superata due rami distinti non vengono mai percorsi contemporaneamente, ma rappresentano due strade alternative scelte secondo un criterio rigidamente deterministico dipendente dall esito della valutazione di una espressione booleana non solo permettono di rappresentare e di descrivere globalmente un processo, ma consentono anche di seguirne l evoluzione permettendo di visualizzare lo stato in cui si trova in un certo istante la rete. 9/93
10 Strumento Strumento di di modellazione modellazione formale formale Possono Possono rappresentare rappresentare infiniti infiniti stati stati con con un un numero numero finito finito di di nodi nodi Strumento Strumento di di analisi analisi e e verifica verifica del del comportamento comportamento di di un un sistema sistema RETIDI PETRI Gli Gli eventi eventi non non sono sono vincolati vincolati ad ad accadere accadere con con frequenza frequenza definita definita Gli Gli eventi eventi a a flusso flusso con con code code vengono vengono rappresentati rappresentati spontaneamente spontaneamente 10/93
11 Rete di Petri: P : = { P, T, F, M } 0 P I Posti T I Transizioni F I Relazioni di flusso M 0 I Marcatura iniziale Flusso Posto Proprietà: Transizione P T = P T F P T T P 1. I gli insiemi dei posti e delle transizioni sono disgiunti 2. I la rete deve avere almeno un posto o una transizione 3. I F lega posti a transizioni e transizioni ai posti ma non transizioni a transizioni e posti a posti 11/93



12 Esempio: pressofusione La pressa 1. Posiziona lo stampo sotto il pistone della pressa 2. Scalda lo stampo 3. Scalda il forno a muffola 4. Accendi la pressa e seleziona i parametri 5. Quando lo stampo è a temperatura la macchina è pronta 6. Quando il forno è a temperatura inserisci il crogiolo 7. Quando il materiale è fuso estrai il crogiolo ed effettua la colata dentro lo stampo 8. Al termine della colata aziona la pressa 9. A fine solidificazione estrai il getto Stampo Provini Forno a muffola 12/93
13 Esempio: pressofusione Macchine pronte Posizionare stampo Scaldare forno Settare pressa stampo posizionato forno a temperatura pressa pronta Riscaldare stampo Fondere materiale stampo a temperatura materiale fuso colata Applicaz. pressione Prodotto finito mat. colato mat. In press. estrazione mat. solidif. solidificazione 13/93

14 Processo di preparazione degli spaghetti al pomodoro 1. soffriggi la cipolla 2. quando il soffritto è pronto aggiungi il pomodoro 3. quando il sugo è cotto metti a bollire l acqua 4. quando l acqua bolle aggiungi il sale 5. butta gli spaghetti nell acqua bollente 6. attendi 8 minuti 7. scola gli spaghetti 8. condisci gli spaghetti con il sugo 14/93

15 Ingredienti pronti Preparazione soffritto Soffritto pronto per la cottura Inizio riscaldamento Inizio bollitura Cottura soffritto Soffritto cotto Cottura degli spaghetti Spaghetti cotti Spaghetti pronti 15/93
16 Una Rete di Petri è un grafo che consiste di posti, transizioni ed archi che li collegano gli archi di input collegano i posti con le transizioni gli archi di output collegano le transizioni con i posti Lo stato della rete indica una sua configurazione in un determinato istante dell esecuzione del processo descritto dalla rete stessa. Una Rete di Petri evolve passando attraverso una serie di stati pezzo 1 grezzo sulla macchina Si conferisce uno stato a una Rete di Petri mediante una marcatura Assegnamento di un numero Stato della rete e marcatura naturale ad ogni posto. Le transizioni invece rappresentano le componenti attive del modello. Rappresentano le attività che possono essere realizzate modificando lo stato della rete. operazione su 1 Operaz. su 1 finita pezzo 1 grezzo sulla macchina operazione su 1 Operaz. su 1 finita 16/93
17 Le transizioni sono consentite (ossia possono essere realizzate) soltanto se sono abilitate, ossia soltanto se tutte le condizioni che le precedono sono verificate. transizione abilitata transizione non abilitata Quando viene attivata una transizione vengono rimossi le marche dai posti che precedono la transizione e alcune marche vengono collocate in ognuno dei posti che seguono la transizione stessa /93
18 grezzo sulla macchina inizio operazione pezzo in lavorazione fine operazione pezzo in attesa scambio pezzi in uscita 18/93
19 grezzo sulla macchina inizio operazione pezzo in lavorazione fine operazione pezzo in attesa scambio pezzi in uscita 19/93
20 grezzo sulla macchina inizio operazione pezzo in lavorazione fine operazione pezzo in attesa scambio pezzi in uscita 20/93
21 grezzo sulla macchina inizio operazione pezzo in lavorazione fine operazione pezzo in attesa scambio pezzi in uscita 21/93
22 grezzo sulla macchina inizio operazione pezzo in lavorazione fine operazione pezzo in attesa scambio pezzi in uscita 22/93
23 grezzo sulla macchina inizio operazione pezzo in lavorazione fine operazione pezzo in attesa scambio pezzi in uscita 23/93
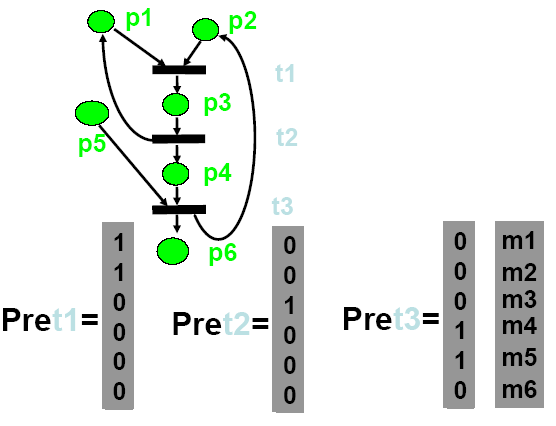
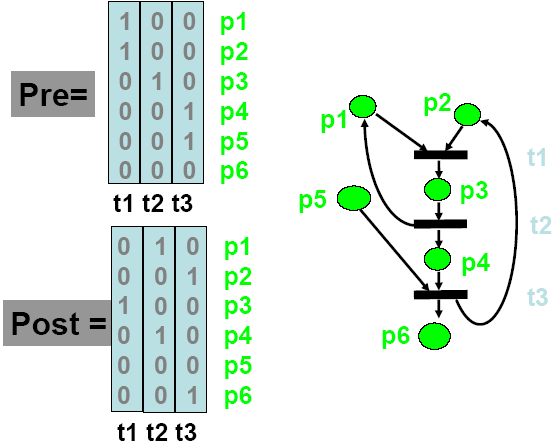
24 T : insieme dei nodi transizione P : insieme dei nodi posto Pre : matrice delle marcature per lo scatto Post : matrice delle marcature create dallo scatto rete di Petri: N = (T, P, Pre, Post, M 0 ) 24/93


25 Matrice PRE La macchina deve essere pronta Il nuovo pezze deve essere arrivato in posizione 25/93
26 26/93
27 27/93
28 Scatto di transizione 28/93

29 RETE DI PETRI MARCATA: {N, M 0 } 29/93

30 GRAFO DI STATO: {N, M 0 } 30/93
31 GRAFO DI STATO: {N, M 0 } 31/93

32 GRAFO DI STATO: {N, M 0 } 32/93

33 GRAFO DI STATO: {N, M 0 } 33/93
34 GRAFO DI STATO: (N, M 0 ) 34/93
35 GRAFO DI STATO: (N, M 0 ) 35/93
36 36/93
37 37/93
38 38/93
 39/93")
39 GRAFO DI STATO: (N, M 0 ) 39/93
40 40/93
 41/93")
41 GRAFO DI STATO: (N, M 0 ) 41/93
42 42/93
 43/93")
43 GRAFO DI STATO: (N, M 0 ) 43/93
44 MATRICE DI INCIDENZA 44/93

45 EQUAZIONE DI STATO 45/93

46 EQUAZIONE DI TRANSIZIONE 46/93

47 Sequenze ammissibili: percorso ammissibile nel grafo degli stati No: S 143 S 125 Si: S 124 S 412 S 142 S 1245 S /93

48 Altro esempio: Una piccola azienda di produzione e confezionamento di dolci ha diverse linee di produzione. Occorre modellare il comportamento del processo ai fini dell assorbimento di energia elettrica per non incorrere in superamenti della potenza contrattuale. Il problema è tipico della progettazione dell impianto elettrico dove è difficile individuare il valore economico della potenza contrattuale 48/93
49 Approfondimenti sulle reti di Petri 49/93
50 Proprietà di base delle Reti di Petri Non determinismo Data una rete di Petri marcata con matrice di marcatura M e dato S l insieme delle transizioni abilitate in M, solamente una di queste viene scelta a caso per lo scatto Non si fa nessun riferimento al tempo Serve una nuova valutazione della futura transizione abilitata a scattare Località della rete: L evoluzione del sistema è locale e ciò è garantito dall indipendenza degli eventi 50/93
51 Esempio di una evoluzione di una rete: P3 P1 e P2: sottorete produttori P3 e P4: sottorete consumatori C1 P5 e P6: sottorete consumatori C2 t1 P1 t2 P7 t3 2 P4 t4 t1 è l assegnazione delle materie prime t2 è la produzione: gli oggetti da produrre in P1 sono prodotti finiti in P2 P2 2 2 t5 P5 4 4 P6 t6 P7 rappresenta una coda tra i produttori e i consumatori t3 e t5 sono le attività di assegnazione dei prodotti ai consumatori t4 e t6 sono le attività di consumo dei prodotti da parte dei consumatori 51/93
52 P3 P1 t3 t4 Una transizione abilitata in A è t2 M 0 t1 t2 P7 2 P4 P2 2 2 t5 P5 t6 4 4 P6 P3 Allo scatto di t2 ci sono quattro possibili transizioni abilitate: t1, t2, t3 e t5 Scatto di t2 t1 P1 P2 t2 2 P7 t3 2 2 t5 P4 P5 t4 t6 4 4 P6 P3 Allo scatto di t3 si ha una nuova configurazione Se volessimo aumentare i prodotti e/o i produttori sarebbe sufficiente aumentare le marche rispettive Scatto di t4 t1 P1 P2 t2 2 P7 t3 2 2 t5 P4 P5 4 4 P6 t4 t6 52/93
53 Strutture fondamentali Due transizioni sono: in sequenza Se t1 precede in una data marcatura t2 e lo scatto di t1 abilita t2 in conflitto strutturale Se e solo se hanno un posto di ingresso in comune in conflitto effettivo Se sono in conflitto strutturale e, poiché le marche non sono sufficienti ad abilitarle entrambe, lo scatto di una transizione disabilita l altra 53/93
54 in concorrenza strutturale Se non condividono nessun posto di ingresso e quindi l una non disabilita l altra in concorrenza effettiva La concorrenza strutturale implica la concorrenza effettiva poiché se sono abilitate entrambe le marche sono sufficienti ad entrambe le transizioni Transizione di sincronizzazione Più posti a monte Transizione di inizio di concorrenza Più posti a valle 54/93
55 Proprietà delle reti di Petri Raggiungibilità: [M > M1 [ M > Una marcatura M 1 è raggiungibile a partire da M se esiste almeno una sequenza di transizioni che permetta il passaggio da M a M 1 Insieme delle marcature raggiungibili a partire da M M 1 raggiungibile da M Reversibilità: Una rete {N,M 0 } è reversibile se per ogni marcatura raggiungibile da M 0, M 0 è raggiungibile da questa marcatura M [ M >, M [ M > 0 0 Home state: Uno stato M* della rete {N,M 0 } è detto di home state se per ogni marcatura raggiungibile da M 0, M* è raggiungibile da questa marcatura M [ M >, M * [ M > 0 55/93
56 Limitatezza: Assenza di accumulo di marcature indesiderate nella rete Posto k-limitato: Rete k-limitata: Rete limitata: In tutte le marcature raggiungibili dalla rete non si supera mai il valore di k Tutti i posti della rete sono k-limitati. Rete k-limitata per qualche valore finito di k Esempio di rete non limitata la sequenza di scatti t1, t2, t3 può avvenire infinite volte accumulando marcature in P4 56/93
57 Rete binaria: Rete 1-limitata (ovvero k-limitata con k=1) Affinché una rete sia binaria la marcatura iniziale M0 e tutte le marcature da essa raggiungibili devono avere solo 0 e 1 Qualunque rete può essere resa binaria con l aggiunta di opportuni posti detti complementari Introduzione del posto P6 con significato complementare a P5: le marcature rappresentano le postazioni libere nel buffer Sistema produttoriconsumatori con buffer intermedio 57/93
58 Vivezza: Capacità della rete di evolvere bene ovvero senza che si blocchi mai Transizione viva: Se e solo se per ogni marcatura raggiungibile da M 0 esiste un altra marcatura raggiungibile dalla prima nella quale la transizione risulta abilitata M [ M >, M [ M > t. c. t abilitata in M 0 Rete viva: Se tutte le transizioni sono vive Considerazioni: Una transizione è viva se da una qualunque marcatura M raggiungibile nella rete è possibile raggiungerne un altra M* in cui t è abilitata. Se questa transizione scatta in M* si raggiunge una marcatura M** che per definizione è raggiungibile da quella iniziale. Pertanto M** ricade nella definizione di vivezza. La transizione è allora ancora viva e a partire da M** raggiunge M*** e così via. In una rete viva tutte le transizioni possono scattare infine volte qualunque sia la marcatura raggiungibile da quella iniziale 58/93
59 Marcatura viva: Se e solo se per ogni transizione esiste una marcatura raggiungibile da M tale che la transizione risulta abilitata t T, M* [ M > t. c. t abilitata in M * A partire dalla marcatura viva è possibile far scattare una qualunque transizione PROPRIETÀ: Una rete è viva se e solo se tutte le sue marcature raggiungibili dalla marcatura iniziale sono vive Marcatura morta: Se e solo se nessuna transizione è abilitata in M 59/93
60 P3 Limitatatezza: SI Vivezza: NO Reversibilità: NO P1 t3 t4 t1 t2 P7 2 P4 P2 2 2 t5 4 P6 P5 4 t6 Limitatatezza: SI Vivezza: NO Reversibilità: SI Limitatatezza: NO Vivezza: SI Reversibilità: SI Limitatatezza: SI Vivezza: SI Reversibilità: NO Esempi di Murata 60/93
61 Analisi delle reti di Petri Insieme di raggiungibilità: Insieme R(N,M 0 ) più piccolo di marcature tale che: M R( N, M ) 0 0 La marcatura iniziale appartiene all insieme M* R( N, M ), t T t. c. M *[ t > M ** M ** R( N, M ) 0 0 Tutte le marcature iniziali raggiungibili dall insieme di raggiungibilità appartiengono all insieme Grafo di raggiungibilità G(N,M 0 ) C Grafo di stato {N,M 0 } completo e minimo 61/93
62 Rete di Petri Grafo di raggiungibilità 62/93
63 Analisi matriciale Metodo di analisi che sfrutta le informazioni contenute nella matrice di incidenza Caratteristiche statiche Caratteristiche che dipendono dalla topologia della rete e non dalla marcatura P-Invarianti Sifoni T-Invarianti Trappole Vettori colonna Insiemi di posti 63/93
64 P-invarianti: Insiemi di posti tali che la somma pesata delle marche che contengono rimane costante per tutte le marcature raggiungibili Def.: Un vettore è P-invariante se: M R( N, M ), x ' t. c. x ' M = x ' M 0 0 Eq. Di stato: Moltiplico a sinistra per x valida per ogni s non vuoto Se x è invariante allora: 64/93
65 Gli invarianti si trovano dalle: Eq. 1 Eq. 2 Infinite soluzioni: Se un x è un P-invariante allora anche k x con k intero lo è Se un x1 e x2 sono P-invarianti allora anche x = x1 + x2 lo è Problema: determinare il più piccolo insieme di P-invarianti in grado di generare tutte le soluzioni delle equazioni 65/93
66 Supporto di un P-invariante: P-invariante a supporto minimo: Insieme dei posti corrispondenti ad elementi non nulli di x Un p-invariante è detto a supporto minimo se il suo supporto non contiene quello di nessun altro P-invariante della rete P-invariante canonico: Un p-invariante è detto a canonico se il massimo comun divisore dei suoi elementi non nulli è 1 Un P-invariante composto di soli elementi positivi permette di identificare un gruppo di posti dove si conserva non tanto il numero di marche ma una loro combinazione lineare Gli P-invarianti positivi sono detti componenti conservative di una rete 66/93
67 Esempio di P-invariante negativo Il numero di marche in P1 è vincolato ad essere uguale a quello di P2 Generatore di P-invarianti positivi: Il più piccolo insieme di P-invarianti positivi PI k tale che ogni altro P-invariante della rete è ottenibile tramite ombinazione lineare degli invarianti di PI k Gli elementi dell insieme si chiamano P-invarianti minimi Proposizione 1 Un P-invariante è minimo se e solo se è canonico e a supporto minimo Proposizione 2 L insieme generatore di P-invarianti è finito ed è unico 67/93
68 Rete coperta da P-invarianti: Ogni posto della rete appartiene al supporto di almeno un P-invariante Rete conservativa: Rete coperta da P-invarianti non negativi p P, x P-invariante t. c. p x et x( p) > 0 Proposizione 3 Una rete conservativa è limitata In una rete conservativa il numero di marche non cresce mai indefinitamente. Non è detto il contrario 68/93
69 Esempi: Reti coperte dal P-invariante [1,1,1] Qualunque sia la marcatura iniziale il numero delle marche si mantiene costante Questa rete è viva Due processi diversi si devono sincronizzare ovvero deve esistere una attesa reciproca Gli P-invarianti minimi sono: [1,1,0,0] e [0,0,1,1] 69/93
70 Calcolo degli P-invarianti minimi Algoritmo di Colom e Silva In matrice identità di dimensione n 70/93
71 T-invarianti: In modo duale agli P-invarianti rappresentano possibili sequenze di scatti che riportano la rete alla marcatura iniziale Def.: Un vettore (colonna) y è T-invariante se è soluzione dell equazione: Eq. 3 Se y è un vettore delle occorrenze coincidente con un T-invariante allora: Osservazione: La presenza di un T-invariante non implica che sia veramente possibile ritornare alla posizione di partenza Il significato di un T-invariante y è quello che, se fosse possibile far scattare ogni transizione del supporto di y in un ordine qualunque ma un numero di volte pari a quello definito da y allora lo stato della rete potrebbe tornare al valore iniziale al termine della sequenza 71/93
72 Confrontando l Eq. 2 con l Eq. 3 Eq. 2 Eq. 3 Si deduce che: gli T-invarianti di una rete con matrice di incidenza C coincidono con gli P-invarianti di una rete con matrice di incidenza C e viceversa La matrice di incidenza C si ottiene dalla rete con matrice C scambiando i posti con le transizioni senza alterare gli indici dei nomi e invertendo il verso degli archi Se non di invertisse il verso degli archi, si otterrebbe una matrice di incidenza C Ad ogni modo C x=0 equivale a -C x=0 così come Cy=0 equivale a -C y=0 pertanto si otterrebbero gli stessi T-invarianti e P-invarianti 72/93
73 Sifoni: Rappresenta un insieme di posti che complessivamente tende a perdere marche durante l evoluzione della rete e che, una volta arrivati a zero, non è più in grado di riacquistarne Notazione per le matrici dei Pre e dei Post: WX Y Pre[X] XW Y Post[X] Def.: Un sifone S è un insieme di posti se e solo se: S S Tutte le transizioni di ingresso per un sifone sono anche di uscita ma esistono delle transizioni di uscita che non sono di ingresso 73/93
74 Esempio: Sifone: infatti: é contenuto in: Sifone: infatti: é contenuto in: 74/93
75 Sifone minimo.: Un sifone S è minimo se e solo se esiste un altro sifone S tale che: S ' S Proprietà L unione di sifoni è un sifone Sifone di base: Un sifone di base è un sifone che non può essere ottenuto come unione di altri sifoni Proprietà Se S è un sifone privo di marche in una certa marcatura M allora è priva di marche anche ogni marcatura raggiungibile M [M> In presenza di un sifone non marcato tutte le transizioni di SW sono morte e la rete in con S non viva 75/93
76 Trappole: È il duale del sifone e rappresenta un insieme di posti che complessivamente tende ad acquistare marche durante l evoluzione della rete e che, una volta presa almeno una marca a zero, non è più in grado di smarcare contemporaneamente tutti i suoi posti Def.: Una trappola S è un insieme di posti se e solo se: S S Tutte le transizioni di uscita per una trappola sono anche di ingresso ma esistono delle transizioni di ingresso che non sono di uscita 76/93
77 Esempio: Trappole: infatti: é contenuto in: Trappole anche: e 77/93
78 Proprietà L unione di trappole è una trappola Proprietà Se S è una trappola marcata in una certa marcatura M allora rimane marcata in ogni marcatura raggiungibile M [M> Proprietà Il supporto di un P-invariante con elementi non negativi è un sifone o una trappola Non tutti i sifoni o trappole di una rete sono pericolosi ai fini della vivezza. Il legame tra queste strutture e la vivezza non è semplice Proprietà Se M è una marcatura morta allora l insieme dei posti privi di marche: È un sifone non marcato 78/93
79 Proprietà Se ogni sifone contiene una trappola marcata in una marcatura M allora non esiste in [M> una marcatura morta Se infatti, per assurdo, esistesse una simile marcatura M allora i posti senza marche in M costituiscono un sifone senza marche contraddicendo l ipotesi N.B.: non è detto che una rete in cui ogni sifone contiene una trappola sia viva Esempio precedente: Sifoni marcati che non contengono trappole Infatti tramite la sequenza [ t3 t1 t2 t1 ] è possibile raggiungere M = [ ] che è morta 79/93
80 Macchine a stati finiti La macchina a stati finiti è un automa Macchina a stati finiti: È una rete di Petri tale che: t T, t = 1 et t = 1 j j j Proprietà : È strettamente conservativa Il numero di marche nella rete non cambia mai Il sistema è finito e pure il grafo di raggiungibilità Se la marcatura iniziale contiene una sola marca allora la rete è binaria Se la rete è fortemente connessa (cioè è possibile andare da un nodo all altro seguendo una relazione di flusso) e se ha almeno un gettone Allora la rete è viva 80/93
81 Grafo marcato Sottoclasse delle reti di Petri in cui ogni posto ha esattamente una transizione di ingresso e una di uscita Grafo marcato: Proprietà : È una rete di Petri tale che: p P, p = 1 et p = 1 i i i Mentre la macchina a stati può avere al suo interno dei conflitti (un posto con molte transizioni in uscita), il grafo marcato non può modellare conflitti A differenza della macchina a stati, il grafo marcato può modellare la creazione e la distruzione di marche necessarie per la simultaneità necessaria per la sincronizzazione Un grafo marcato è vivo se e solo se ogni suo ciclo contiene almeno un posto con una marca Sequenza di posti ottenuta con un flusso in cui la transizione di ingresso al primo posto della sequenza è anche quella di uscita all ultimo posto 81/93
82 Reti a scelta libera Sono reti che non ammettono confusione Scelta libera: È una rete di Petri tale che: t T, p P, t = { p } opp p = { t } j i j i i j Per ogni arco da un posto ad una transizione o quel posto è l unico posto in ingresso a quella transizione (non c è sincronizzazione) oppure quella transizione è l unica transizione in uscita da quel posto (non ci sono conflitti) I conflitti potenziali sono controllati: I conflitti accadono solo se il posto è in ingresso a molte transizioni Se un posto è in ingresso a molte transizioni allora esso è l unico ingresso per tutte le transizioni O tutte le transizioni sono permesse o non lo è nessuna Scelta libera 82/93
83 Una macchina a stati e un grafo marcato sono reti a scelta libera ma non vale il viceversa Tipica situazione di confusione Non è chiaro a priori quale delle due transizioni scatterà CONFLITTO 83/93
84 Reti a scelta libera estesa Scelta libera estesa: È una rete di Petri tale che: t T, p, un arco da tutti i posti di ingresso a t a tutte le trasizioni di uscita di p j i j i Se due posti hanno una transizione di uscita in comune, allora quei posti hanno le stesse transizione di uscita: Rete a scelta libera estesa Una rete a scelta libera estesa è una rete a scelta libera ma non vale il viceversa Teorema di Commoner: una rete a scelta libera estesa è viva se i suoi sifoni contengono una trappola trasformazione in rete a scelta libera 84/93
85 Reti a scelta asimmetrica Scelta libera asimmetrica: È una rete di Petri tale che: p p p p opp p p i j i j i j Esempio di scelta asimmetrica Proprietà Una rete a scelta asimmetrica è viva se (ma non solo se) tutti i sifoni contengono una trappola 85/93
86 Diagramma di Venn per le relazioni tra le classi di reti di Petri 86/93




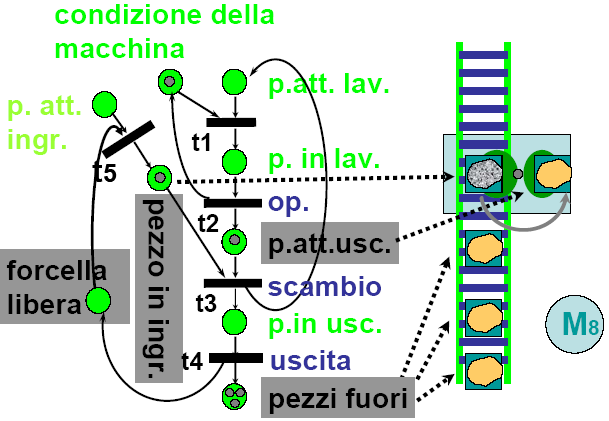
87 Esempio di processo manifatturiero Il processo in esame è costituito da due centri di lavoro, due robot e due nastri trasportatori. Ogni centro è servito da un robot per le operazioni di carico e scarico. Un nastro è usato per i pezzi da lavorare, con un massimo per entrambi di due alla volta. L altro nastro è usato per i pallet vuoti. Ci sono tre pallet disponibili nel sistema. Ogni pezzo da lavorare è manipolato su M1 e M2, in questo ordine. Centro di lavoro M1 Centro di lavoro M2 Semilavorati Robot 1 Robot 2 Nastro trasportatore 2 Prodotti finiti Pallet Nastro trasportatore 1 Pallet 87/93
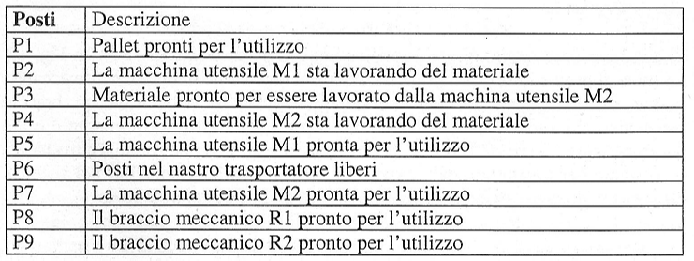
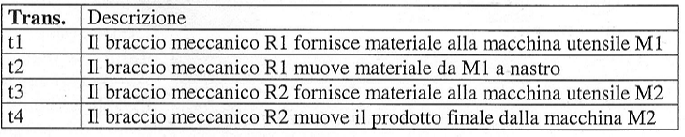
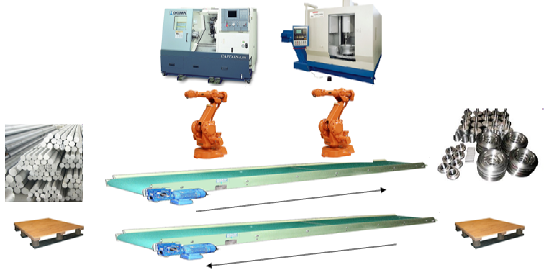
88 88/93
89 Marcatura iniziale: Matrice di incidenza: 89/93
90 Unico T-invariante: Gli P-invarianti minimi sono 6: Supporti agli P-invarianti: Ogni posto della rete appartiene ad almeno un P-invariante dunque la rete è CONSERVATIVA e LIMITATA 90/93
91 Marcature raggiungibili dalla rete: 91/93
92 Grafo di raggiungibilità 92/93
93 Analisi del grafo di raggiungibilità Dal grafo di deduce che la rete progettata è viva Infatti: a partire da ogni marcatura raggiungibile, è possibile raggiungerne un altra in cui una determinata transizione sia abilitata Lo si poteva vedere anche considerando che la rete di Petri è un grafo marcato poiché gli unici sifoni che contiene sono i supporti dei P-invarianti che sono inizialmente marcati, allora la rete è viva 93/93
Modellazione dei processi produttivi 98
 Modellazione dei processi produttivi Sistemi DES Reti di Petri Equazione di stato Grafo di stato Strutture fondamentali Proprietà Analisi matriciale P-invarianti T-invarianti Sifoni Trappole Macchine a
Modellazione dei processi produttivi Sistemi DES Reti di Petri Equazione di stato Grafo di stato Strutture fondamentali Proprietà Analisi matriciale P-invarianti T-invarianti Sifoni Trappole Macchine a
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul
Automazione industriale dispense del corso (a.a. 2008/2009) 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul
Appunti sulle Reti di Petri
 Appunti sulle Reti di Petri Marco Liverani 13 maggio 2004 1 Introduzione Le Reti di Petri, proposte nel 1962 da Carl Adam Petri, sono uno strumento per la modellizzazione di processi ed in particolare
Appunti sulle Reti di Petri Marco Liverani 13 maggio 2004 1 Introduzione Le Reti di Petri, proposte nel 1962 da Carl Adam Petri, sono uno strumento per la modellizzazione di processi ed in particolare
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 13 Reti di Petri Proprietà Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Proprietà Raggiungibilità Una marcatura M
Corso di Automazione industriale Lezione 13 Reti di Petri Proprietà Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Proprietà Raggiungibilità Una marcatura M
Luigi Piroddi
 Automazione industriale dispense del corso 13. Reti di Petri: analisi strutturale sifoni e trappole Luigi Piroddi piroddi@elet.polimi.it Introduzione Abbiamo visto in precedenza il ruolo dei P-invarianti
Automazione industriale dispense del corso 13. Reti di Petri: analisi strutturale sifoni e trappole Luigi Piroddi piroddi@elet.polimi.it Introduzione Abbiamo visto in precedenza il ruolo dei P-invarianti
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 9. Reti di Petri: analisi dinamica e metodi di riduzione Luigi Piroddi piroddi@elet.polimi.it Metodi di analisi di Reti di Petri Ci sono 2 modi
Automazione industriale dispense del corso (a.a. 2008/2009) 9. Reti di Petri: analisi dinamica e metodi di riduzione Luigi Piroddi piroddi@elet.polimi.it Metodi di analisi di Reti di Petri Ci sono 2 modi
Luigi Piroddi
 Automazione industriale dispense del corso 9. Reti di Petri: analisi dinamica e metodi di riduzione Luigi Piroddi piroddi@elet.polimi.it Metodi di analisi di Reti di Petri Ci sono 2 modi per analizzare
Automazione industriale dispense del corso 9. Reti di Petri: analisi dinamica e metodi di riduzione Luigi Piroddi piroddi@elet.polimi.it Metodi di analisi di Reti di Petri Ci sono 2 modi per analizzare
Sistemi dinamici a eventi discreti. Sistemi dinamici a eventi discreti
 Sistemi dinamici a eventi discreti Classificazione dei processi 1 Sistemi dinamici a eventi discreti - classificazione dei processi - Introduciamo ora un po di terminologia. I processi industriali si possono
Sistemi dinamici a eventi discreti Classificazione dei processi 1 Sistemi dinamici a eventi discreti - classificazione dei processi - Introduciamo ora un po di terminologia. I processi industriali si possono
Sistemi dinamici a eventi discreti. Classificazione dei processi
 Sistemi dinamici a eventi discreti Classificazione dei processi 1 Sistemi dinamici a eventi discreti - classificazione dei processi - Introduciamo ora un po di terminologia. I processi industriali si possono
Sistemi dinamici a eventi discreti Classificazione dei processi 1 Sistemi dinamici a eventi discreti - classificazione dei processi - Introduciamo ora un po di terminologia. I processi industriali si possono
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 8. Reti di Petri: rappresentazione algebrica Luigi Piroddi piroddi@elet.polimi.it Rappresentazione matriciale o algebrica E possibile analizzare
Automazione industriale dispense del corso (a.a. 2008/2009) 8. Reti di Petri: rappresentazione algebrica Luigi Piroddi piroddi@elet.polimi.it Rappresentazione matriciale o algebrica E possibile analizzare
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 6. Reti di Petri: definizioni, evoluzione e proprietà Luigi Piroddi piroddi@elet.polimi.it Reti di Petri Un formalismo molto potente e compatto
Automazione industriale dispense del corso (a.a. 2008/2009) 6. Reti di Petri: definizioni, evoluzione e proprietà Luigi Piroddi piroddi@elet.polimi.it Reti di Petri Un formalismo molto potente e compatto
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 14 Reti di Petri Modellizzazione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A. L. Cologni 1 Introduzione Un sistema di produzione
Corso di Automazione industriale Lezione 14 Reti di Petri Modellizzazione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2017/2018, A. L. Cologni 1 Introduzione Un sistema di produzione
Luigi Piroddi
 Automazione industriale dispense del corso 12. Metodi top-down, bottom-up e ibridi Luigi Piroddi piroddi@elet.polimi.it Introduzione Esistono varie tecniche sistematiche di modellizzazione che consentono
Automazione industriale dispense del corso 12. Metodi top-down, bottom-up e ibridi Luigi Piroddi piroddi@elet.polimi.it Introduzione Esistono varie tecniche sistematiche di modellizzazione che consentono
AUTOMAZIONE INDUSTRIALE (Prof. Luigi Piroddi)
") POLITECNICO DI MILANO - SEDE DI COMO AUTOMAZIONE INDUSTRIALE (Prof. Luigi Piroddi) Anno Accademico 22/3 Prima Verifica in Itinere (recupero) Appello del 7 febbraio 23 ESERCIZIO Si consideri la rete di
POLITECNICO DI MILANO - SEDE DI COMO AUTOMAZIONE INDUSTRIALE (Prof. Luigi Piroddi) Anno Accademico 22/3 Prima Verifica in Itinere (recupero) Appello del 7 febbraio 23 ESERCIZIO Si consideri la rete di
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 12. Metodi top-down, bottom-up e ibridi Luigi Piroddi piroddi@elet.polimi.it Introduzione Abbiamo visto un esempio di costruzione di un modello
Automazione industriale dispense del corso (a.a. 2008/2009) 12. Metodi top-down, bottom-up e ibridi Luigi Piroddi piroddi@elet.polimi.it Introduzione Abbiamo visto un esempio di costruzione di un modello
Automazione. 4 Aprile 2016
 Automazione 4 Aprile 2016 Esercizio 1 Si consideri un sistema di automazione in cui, a livello di coordinamento, sia necessario portare a termine tre tipi di task periodici inerenti i componenti trasportati
Automazione 4 Aprile 2016 Esercizio 1 Si consideri un sistema di automazione in cui, a livello di coordinamento, sia necessario portare a termine tre tipi di task periodici inerenti i componenti trasportati
Analisi matriciale delle reti di Petri (P/T) Sifoni e trappole Classi di reti di Petri
 Sifoni e trappole Classi di reti di Petri") Analisi matriciale delle reti di Petri (P/T) Sifoni e trappole Classi di reti di Petri 1 Analisi matriciale delle reti di Petri (P/T) - richiami preliminari sulle proprietà strutturali - Abbiamo visto
Analisi matriciale delle reti di Petri (P/T) Sifoni e trappole Classi di reti di Petri 1 Analisi matriciale delle reti di Petri (P/T) - richiami preliminari sulle proprietà strutturali - Abbiamo visto
ESERCIZIO 1 - Indicare se le seguenti affermazioni sono vere (V) o false (F). Una risposta sbagliata viene penalizzata più di una risposta non data.
 o false (F). Una risposta sbagliata viene penalizzata più di una risposta non data.") ESERCIZIO 1 - Indicare se le seguenti affermazioni sono vere (V) o false (F). Una risposta sbagliata viene penalizzata più di una risposta non data. 1.1) Data una rete (,T,F,W,M 0 ), con, T, F < k, a.
ESERCIZIO 1 - Indicare se le seguenti affermazioni sono vere (V) o false (F). Una risposta sbagliata viene penalizzata più di una risposta non data. 1.1) Data una rete (,T,F,W,M 0 ), con, T, F < k, a.
Analisi matriciale delle reti di Petri (P/T)
") Analisi matriciale delle reti di Petri (P/T) Sifoni e trappole Classi di reti di Petri 1 - richiami preliminari sulle proprietà strutturali - Abbiamo visto che alcune caratteristiche dei sistemi dinamici
Analisi matriciale delle reti di Petri (P/T) Sifoni e trappole Classi di reti di Petri 1 - richiami preliminari sulle proprietà strutturali - Abbiamo visto che alcune caratteristiche dei sistemi dinamici
Laboratorio di Informatica
 Laboratorio di Informatica Metodologie, Tecnologie e Strumenti per l automatizzazione dell informazione Corso di Laurea «Scienze dell Educazione» AA 2010-2011 Prof. Giorgio Poletti giorgio.poletti@unife.it
Laboratorio di Informatica Metodologie, Tecnologie e Strumenti per l automatizzazione dell informazione Corso di Laurea «Scienze dell Educazione» AA 2010-2011 Prof. Giorgio Poletti giorgio.poletti@unife.it
Luigi Piroddi
 Automazione industriale dispense del corso 6. Reti di Petri: definizioni, evoluzione e proprietà Luigi Piroddi piroddi@elet.polimi.it Reti di Petri Un formalismo molto potente e compatto per rappresentare
Automazione industriale dispense del corso 6. Reti di Petri: definizioni, evoluzione e proprietà Luigi Piroddi piroddi@elet.polimi.it Reti di Petri Un formalismo molto potente e compatto per rappresentare
1.1) Si spieghi sinteticamente il significato del simbolo riportato in figura.
 Si spieghi sinteticamente il significato del simbolo riportato in figura.") ESERCIZIO 1. 1.1) Si spieghi sinteticamente il significato del simbolo riportato in figura. 1 2 3 Si tratta del simbolo ISO di una valvola di controllo direzionale 3/2 con comando elettrico a due stati
ESERCIZIO 1. 1.1) Si spieghi sinteticamente il significato del simbolo riportato in figura. 1 2 3 Si tratta del simbolo ISO di una valvola di controllo direzionale 3/2 con comando elettrico a due stati
AUTOMAZIONE INDUSTRIALE Prof. Luca Ferrarini
 POLITECNICO DI MILANO AUTOMAZIONE INDUSTRIALE Prof. Luca Ferrarini Anno Accademico 2009 / 10 24 giugno 2010 COGNOME... NOME... MATRICOLA... FIRMA... Non riportare sulla stessa pagina risposte a domande
POLITECNICO DI MILANO AUTOMAZIONE INDUSTRIALE Prof. Luca Ferrarini Anno Accademico 2009 / 10 24 giugno 2010 COGNOME... NOME... MATRICOLA... FIRMA... Non riportare sulla stessa pagina risposte a domande
Modellazione di Workflow mediante le Reti di Petri. Prof. Giancarlo Fortino
 Modellazione di Workflow mediante le Reti di Petri Prof. Giancarlo Fortino g.fortino@unical.it Introduzione Il successo di un sistema di workflow si basa sulla qualità dei flussi di lavoro che lo compongono.
Modellazione di Workflow mediante le Reti di Petri Prof. Giancarlo Fortino g.fortino@unical.it Introduzione Il successo di un sistema di workflow si basa sulla qualità dei flussi di lavoro che lo compongono.
Automazione 12 Febbraio 2018
 Automazione 12 Febbraio 2018 Esercizio 1 Si consideri un sistema di automazione operante a livello di coordinamento per il controllo di un robot pick-and-place (PNP1) così caratterizzato: Task A 1 ) ogni
Automazione 12 Febbraio 2018 Esercizio 1 Si consideri un sistema di automazione operante a livello di coordinamento per il controllo di un robot pick-and-place (PNP1) così caratterizzato: Task A 1 ) ogni
AUTOMA A STATI FINITI
 Gli Automi Un Automa è un dispositivo, o un suo modello in forma di macchina sequenziale, creato per eseguire un particolare compito, che può trovarsi in diverse configurazioni più o meno complesse caratterizzate
Gli Automi Un Automa è un dispositivo, o un suo modello in forma di macchina sequenziale, creato per eseguire un particolare compito, che può trovarsi in diverse configurazioni più o meno complesse caratterizzate
Soluzione degli esercizi del Capitolo 8
 Sistemi di automazione industriale - C. Bonivento, L. Gentili, A. Paoli Soluzione degli esercizi del Capitolo 8 Soluzione dell Esercizio E8. La rete di Petri corrispondente alle matrici I, O e marcatura
Sistemi di automazione industriale - C. Bonivento, L. Gentili, A. Paoli Soluzione degli esercizi del Capitolo 8 Soluzione dell Esercizio E8. La rete di Petri corrispondente alle matrici I, O e marcatura
Analisi matriciale delle reti di Petri (P/T)
") Analisi matriciale delle reti di Petri (P/T) Proprietà strutturali: P-invarianti e T-invarianti Analisi matriciale delle reti di Petri (P/T) - richiami preliminari sull evoluzione delle RdP - Condizione
Analisi matriciale delle reti di Petri (P/T) Proprietà strutturali: P-invarianti e T-invarianti Analisi matriciale delle reti di Petri (P/T) - richiami preliminari sull evoluzione delle RdP - Condizione
Luigi Piroddi piroddi@elet.polimi.it
 Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Le reti di Petri P/T (Posti/Transizioni)
") Le reti di Petri P/T (Posti/Transizioni) Rete di Petri P/T (Posti/Transizioni) - rappresentazione grafica - Elementi costitutivi Esempio Posto Transizione Arco Peso (1 se omesso) w P1 P T1 P3 Marca (o
Le reti di Petri P/T (Posti/Transizioni) Rete di Petri P/T (Posti/Transizioni) - rappresentazione grafica - Elementi costitutivi Esempio Posto Transizione Arco Peso (1 se omesso) w P1 P T1 P3 Marca (o
9. Reti di Petri (rdp)
") 9. Reti di Petri (rdp) Maria Paola Cabasino, Dicembre 2010 Le rdp sono un modello di sistemi ad eventi discreti che trae origine dal lavoro di Carl Adam Petri. Vantaggi delle rdp: Le rdp sono un formalismo
9. Reti di Petri (rdp) Maria Paola Cabasino, Dicembre 2010 Le rdp sono un modello di sistemi ad eventi discreti che trae origine dal lavoro di Carl Adam Petri. Vantaggi delle rdp: Le rdp sono un formalismo
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 11. Modellizzazione con reti di Petri Luigi Piroddi piroddi@elet.polimi.it Introduzione Un sistema di produzione automatizzato serve a ricavare
Automazione industriale dispense del corso (a.a. 2008/2009) 11. Modellizzazione con reti di Petri Luigi Piroddi piroddi@elet.polimi.it Introduzione Un sistema di produzione automatizzato serve a ricavare
Luigi Piroddi
 Automazione industriale dispense del corso 11. Modellizzazione con reti di Petri piroddi@elet.polimi.it Introduzione Un sistema di produzione automatizzato serve a ottenere prodotti finiti a partire da
Automazione industriale dispense del corso 11. Modellizzazione con reti di Petri piroddi@elet.polimi.it Introduzione Un sistema di produzione automatizzato serve a ottenere prodotti finiti a partire da
GRAFI. Cosa sono Grafi non orientati Grafi orientati Grafi pesati Alberi Automi!
 G R A F I 1 GRAFI Cosa sono Grafi non orientati Grafi orientati Grafi pesati Alberi Automi! 2 cip: cip: Pallogrammi Pallogrammi GRAFI: cosa sono I grafi sono una struttura matematica fondamentale: servono
G R A F I 1 GRAFI Cosa sono Grafi non orientati Grafi orientati Grafi pesati Alberi Automi! 2 cip: cip: Pallogrammi Pallogrammi GRAFI: cosa sono I grafi sono una struttura matematica fondamentale: servono
Somma 3-bit. somma 3-bit con I/O sequenziale. somma 3-bit con I/O sequenziale. Osservazione
 RETI COMBINATORIE In una rete combinatoria l uscita è funzione dei soli ingressi u = f () ADDIZIONATORE PARALLELO Addizionatore parallelo (a propagazione di riporto - ripple carry) per numeri binari di
RETI COMBINATORIE In una rete combinatoria l uscita è funzione dei soli ingressi u = f () ADDIZIONATORE PARALLELO Addizionatore parallelo (a propagazione di riporto - ripple carry) per numeri binari di
Premessa (1) Premessa (2) Notazione (1) Reti di Petri - Introduzione. Concettualmente una PN è costituita
 Premessa (2) Notazione (1) Reti di Petri - Introduzione. Concettualmente una PN è costituita") Premessa (1) Reti di Petri - Introduzione Una Rete di Petri (Petri Net - PN) è un modello astratto e formale per la rappresentazione del comportamento dinamico di sistemi discreti che esibiscono attività
Premessa (1) Reti di Petri - Introduzione Una Rete di Petri (Petri Net - PN) è un modello astratto e formale per la rappresentazione del comportamento dinamico di sistemi discreti che esibiscono attività
AUTOMAZIONE INDUSTRIALE. Agostino Marcello Mangini
 AUTOMAZIONE INDUSTRIALE Agostino Marcello Mangini Dipartimento di Elettronica ed Elettrotecnica Politecnico di Bari E-mail: mangini@deemail.poliba.it Sito Web: http://dee.poliba.it/labcontrolli/mangini.htm
AUTOMAZIONE INDUSTRIALE Agostino Marcello Mangini Dipartimento di Elettronica ed Elettrotecnica Politecnico di Bari E-mail: mangini@deemail.poliba.it Sito Web: http://dee.poliba.it/labcontrolli/mangini.htm
Automazione 11 Aprile 2017
 Esercizio Automazione Aprile 7 Si consideri un sistema di automazione operante a livello di conduzione che deve gestire i seguenti task periodici: ogni 6 t.u. viene registrato un log completo di sistema,
Esercizio Automazione Aprile 7 Si consideri un sistema di automazione operante a livello di conduzione che deve gestire i seguenti task periodici: ogni 6 t.u. viene registrato un log completo di sistema,
Indice generale. Prefazione
 Prefazione vii 1 Classificazione dei sistemi e dei modelli 1 1.1 Introduzione 1 1.2 Principi di base della teoria dei sistemi e del controllo 2 1.2.1 I concetti di sistema e di modello 3 1.2.2 Il concetto
Prefazione vii 1 Classificazione dei sistemi e dei modelli 1 1.1 Introduzione 1 1.2 Principi di base della teoria dei sistemi e del controllo 2 1.2.1 I concetti di sistema e di modello 3 1.2.2 Il concetto
min det det Allora è unimodulare se e solo se det 1, 1, 0 per ogni sottomatrice quadrata di di qualsiasi dimensione.
 Se è unimodulare e è intero allora il poliedro 0 ha vertici interi. Sia un vertice di Per definizione esiste allora una base di tale che, 0 Poiché è non singolare ( invertibile det 0) si ha che det 1 è
Se è unimodulare e è intero allora il poliedro 0 ha vertici interi. Sia un vertice di Per definizione esiste allora una base di tale che, 0 Poiché è non singolare ( invertibile det 0) si ha che det 1 è
Analisi di PN. Uso delle PN per l'analisi dei Sistemi Dinamici Discreti. Proprietà (1) Reti di Petri Analisi di Alcune Proprietà
 Reti di Petri Analisi di Alcune Proprietà") Reti di Petri Analisi di Alcune Proprietà Analisi di PN Tra i vantaggi che si hanno modellizzando sistemi con PN c'è la possibilità di analizzare il comportamento di sistemi, al fine di scoprire eventuali
Reti di Petri Analisi di Alcune Proprietà Analisi di PN Tra i vantaggi che si hanno modellizzando sistemi con PN c'è la possibilità di analizzare il comportamento di sistemi, al fine di scoprire eventuali
LABORATORIO DI INFORMATICA Lezione 7
 Laurea in Scienze dell Educazione a.a. 2009-200 LABORATORIO DI INFORMATICA Lezione 7 00 000 00 0 000 000 0 La nostra immaginazione è tesa al massimo; non, come nelle storie fantastiche, per immaginare
Laurea in Scienze dell Educazione a.a. 2009-200 LABORATORIO DI INFORMATICA Lezione 7 00 000 00 0 000 000 0 La nostra immaginazione è tesa al massimo; non, come nelle storie fantastiche, per immaginare
Processi e impianti. Processi e impianti industriali
 Processi e impianti industriali 1 Processo industriale: Processi e impianti combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime,
Processi e impianti industriali 1 Processo industriale: Processi e impianti combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime,
Analisi matriciale delle reti di Petri (P/T)
") Analisi matriciale delle reti di Petri (P/T) - P-invarianti e T-invarianti - Analisi matriciale delle reti di Petri (P/T) - richiami preliminari sull evoluzione delle RdP - Condizione di abilitazione di
Analisi matriciale delle reti di Petri (P/T) - P-invarianti e T-invarianti - Analisi matriciale delle reti di Petri (P/T) - richiami preliminari sull evoluzione delle RdP - Condizione di abilitazione di
SISTEMI CASUALI DINAMICI (PROCESSI) ESEMPIO: I GUASTI (Ipotesi Markoviana) Frequenza dei guasti: N Guasti = N/T X X X X X X X
 ESEMPIO: I GUASTI (Ipotesi Markoviana) Frequenza dei guasti: N Guasti = N/T X X X X X X X") CATENE DI MARKOV SISTEMI CASUALI DINAMICI (PROCESSI) ESEMPIO: I GUASTI (Ipotesi Markoviana) Frequenza dei guasti: N Guasti = N/T X X X X X X X X X 0 T 0 T! Δ 0, 1,, 0 Δ 1 Δ Δ 1Δ Δ Δ ESEMPIO: I GUASTI (Ipotesi
CATENE DI MARKOV SISTEMI CASUALI DINAMICI (PROCESSI) ESEMPIO: I GUASTI (Ipotesi Markoviana) Frequenza dei guasti: N Guasti = N/T X X X X X X X X X 0 T 0 T! Δ 0, 1,, 0 Δ 1 Δ Δ 1Δ Δ Δ ESEMPIO: I GUASTI (Ipotesi
Corso di elettrotecnica Materiale didattico: i grafi
 Corso di elettrotecnica Materiale didattico: i grafi A. Laudani 12 ottobre 2005 I grafi costituiscono uno strumento matematico che permette di descrivere e schematizzare una grande varietà di problemi
Corso di elettrotecnica Materiale didattico: i grafi A. Laudani 12 ottobre 2005 I grafi costituiscono uno strumento matematico che permette di descrivere e schematizzare una grande varietà di problemi
1.2) Si spieghi sinteticamente il significato del simbolo riportato in figura
 Si spieghi sinteticamente il significato del simbolo riportato in figura") ESERCIZIO 1 1.1) Spiegare cosa si intende per cilindro a doppio effetto Il cilindro a doppio effetto sviluppa una forza sia in andata che in ritorno. Ciò avviene iniettando il fluido in pressione alternativamente
ESERCIZIO 1 1.1) Spiegare cosa si intende per cilindro a doppio effetto Il cilindro a doppio effetto sviluppa una forza sia in andata che in ritorno. Ciò avviene iniettando il fluido in pressione alternativamente
Prof. Capuzzimati Mario - ITIS Magistri Cumacini - Como SISTEMI
 Sistemi - Definizioni SISTEMI DEFINIZIONI SISTEMA: insieme di elementi, parti, che interagiscono coordinati per svolgere una deteminata funzione. COMPONENTI: parti di cui il sistema è costituito. PARAMETRI:
Sistemi - Definizioni SISTEMI DEFINIZIONI SISTEMA: insieme di elementi, parti, che interagiscono coordinati per svolgere una deteminata funzione. COMPONENTI: parti di cui il sistema è costituito. PARAMETRI:
«Sciente e Tecnologie dei Beni Culturali»
 5 Informatica CdS in «Sciente e Tecnologie dei Beni Culturali» AA 2014-2015 Mini-sito dell insegnamento: http://www.unife.it/scienze/beni.culturali/insegnamenti/informatica Prof. Giorgio Poletti giorgio.poletti@unife.it
5 Informatica CdS in «Sciente e Tecnologie dei Beni Culturali» AA 2014-2015 Mini-sito dell insegnamento: http://www.unife.it/scienze/beni.culturali/insegnamenti/informatica Prof. Giorgio Poletti giorgio.poletti@unife.it
Università di Bergamo Dip. di Ingegneria gestionale, dell'informazione e della produzione INGEGNERIA DEL SOFTWARE. Paolo Salvaneschi D1_2 V3.
 Università di Bergamo Dip. di Ingegneria gestionale, dell'informazione e della produzione INGEGNERIA DEL SOFTWARE Paolo Salvaneschi D1_2 V3.4 Reti di Petri Il contenuto del documento è liberamente utilizzabile
Università di Bergamo Dip. di Ingegneria gestionale, dell'informazione e della produzione INGEGNERIA DEL SOFTWARE Paolo Salvaneschi D1_2 V3.4 Reti di Petri Il contenuto del documento è liberamente utilizzabile
Automazione Industriale
 POLITECNICO DI MILANO V Facoltà di Ingegneria Automazione Industriale Prof. Luca Ferrarini Laboratorio Daisy Distributed AutomatIon SYstems www.daisylab.tk (at.climavem.com/daisyweb) Il docente Docente
POLITECNICO DI MILANO V Facoltà di Ingegneria Automazione Industriale Prof. Luca Ferrarini Laboratorio Daisy Distributed AutomatIon SYstems www.daisylab.tk (at.climavem.com/daisyweb) Il docente Docente
Fondamenti di informatica II 1. Sintesi di reti logiche sequenziali
 Titolo lezione Fondamenti di informatica II 1 Sintesi di reti logiche sequenziali Reti combinatorie e sequenziali Fondamenti di informatica II 2 Due sono le tipologie di reti logiche che studiamo Reti
Titolo lezione Fondamenti di informatica II 1 Sintesi di reti logiche sequenziali Reti combinatorie e sequenziali Fondamenti di informatica II 2 Due sono le tipologie di reti logiche che studiamo Reti
Note sulle Catene di Markov
 Note sulle Catene di Markov ELAUT Prof. Giuseppe C. Calafiore Sommario Queste note contengono un estratto schematico ridotto di parte del materiale relativo alle Catene di Markov a tempo continuo e a tempo
Note sulle Catene di Markov ELAUT Prof. Giuseppe C. Calafiore Sommario Queste note contengono un estratto schematico ridotto di parte del materiale relativo alle Catene di Markov a tempo continuo e a tempo
Corso di Informatica di Base
 Corso di Informatica di Base A.A. 2011/2012 Algoritmi e diagrammi di flusso Luca Tornatore Cos è l informatica? Calcolatore: esecutore di ordini o automa Programma: insieme di istruzioni che possono essere
Corso di Informatica di Base A.A. 2011/2012 Algoritmi e diagrammi di flusso Luca Tornatore Cos è l informatica? Calcolatore: esecutore di ordini o automa Programma: insieme di istruzioni che possono essere
5. Catene di Markov a tempo discreto (CMTD)
") 5. Catene di Markov a tempo discreto (CMTD) Carla Seatzu, 8 Marzo 2008 Definizione: CATENA Le catene sono p.s. in cui lo stato è discreto : X{x,x 2, }. L insieme X può essere sia finito sia infinito numerabile.
5. Catene di Markov a tempo discreto (CMTD) Carla Seatzu, 8 Marzo 2008 Definizione: CATENA Le catene sono p.s. in cui lo stato è discreto : X{x,x 2, }. L insieme X può essere sia finito sia infinito numerabile.
Sistemi ad Eventi Discreti Dinamici o DEDS (Discrete Event Dynamic System) Ing.Francesco M. Raimondi Lezioni del corso di
 Ing.Francesco M. Raimondi Lezioni del corso di") AUTOMAZIONE INDUSTRIALE Le Reti di Petri Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Automazione Industriale Dipartimento di Ingegneria dell Automazione e dei Sistemi Classificazione
AUTOMAZIONE INDUSTRIALE Le Reti di Petri Ing.Francesco M. Raimondi www.unipa.it/fmraimondi Lezioni del corso di Automazione Industriale Dipartimento di Ingegneria dell Automazione e dei Sistemi Classificazione
Corso di Sistemi Modulo di Sistemi a Eventi Discreti (ex Metodi di Specifica) Esercizi
 Esercizi") Corso di Sistemi Modulo di Sistemi a Eventi Discreti (ex Metodi di Specifica) Esercizi Laurea magistrale in Ingegneria e Scienze informatiche Tiziano Villa Anno Accademico 2013-14 Questo documento in costruzione
Corso di Sistemi Modulo di Sistemi a Eventi Discreti (ex Metodi di Specifica) Esercizi Laurea magistrale in Ingegneria e Scienze informatiche Tiziano Villa Anno Accademico 2013-14 Questo documento in costruzione
Corso di Automazione Industriale 1. Capitolo 2
 Simona Sacone - DIST Corso di Automazione Industriale 1 Capitolo 2 Aspetti tecnologici Simona Sacone - DIST 2 Evoluzione tecnologica NC machine PLC CC machine o Machine Center Numerical Control machine
Simona Sacone - DIST Corso di Automazione Industriale 1 Capitolo 2 Aspetti tecnologici Simona Sacone - DIST 2 Evoluzione tecnologica NC machine PLC CC machine o Machine Center Numerical Control machine
Modulo 1 Concetti di base della Tecnologia dell Informazione
 Modulo 1 Concetti di base della Tecnologia dell Informazione 1.0.1.1 1.0.1.2 1.0.1.3 Algoritmi Definizione di algoritmo e sua rappresentazione grafica Per algoritmo si intende un procedimento, che permette
Modulo 1 Concetti di base della Tecnologia dell Informazione 1.0.1.1 1.0.1.2 1.0.1.3 Algoritmi Definizione di algoritmo e sua rappresentazione grafica Per algoritmo si intende un procedimento, che permette
Processi e impianti. industriali. Processi e impianti. Processi e impianti. Processi e impianti. Processo industriale:
 industriali Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
industriali Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
«Sciente e Tecnologie dei Beni Culturali»
 6 Informatica CdS in «Sciente e Tecnologie dei Beni Culturali» AA 2014-2015 Mini-sito dell insegnamento: http://www.unife.it/scienze/beni.culturali/insegnamenti/informatica Prof. Giorgio Poletti giorgio.poletti@unife.it
6 Informatica CdS in «Sciente e Tecnologie dei Beni Culturali» AA 2014-2015 Mini-sito dell insegnamento: http://www.unife.it/scienze/beni.culturali/insegnamenti/informatica Prof. Giorgio Poletti giorgio.poletti@unife.it
Reti di Petri: analisi, modellistica e controllo
 Reti di Petri: analisi, modellistica e controllo Alessandro De Luca Reti di Petri Sono un formalismo grafico/matematico per la modellazione di sistemi dinamici a eventi discreti q introdotte nel 1962 da
Reti di Petri: analisi, modellistica e controllo Alessandro De Luca Reti di Petri Sono un formalismo grafico/matematico per la modellazione di sistemi dinamici a eventi discreti q introdotte nel 1962 da
Sistemi e Modelli. Lezione marzo Ing. Chiara Foglietta
 Sistemi e Modelli 10 marzo 2015 Ing. foglietta.chiara@gmail.com Università degli Studi di Cassino e del Lazio Meridionale Agenda Il concetto di sistema 2 Sistema Sistema è uno dei concetti basilari che
Sistemi e Modelli 10 marzo 2015 Ing. foglietta.chiara@gmail.com Università degli Studi di Cassino e del Lazio Meridionale Agenda Il concetto di sistema 2 Sistema Sistema è uno dei concetti basilari che
I Diagrammi di Flusso OO
 Corso di Laurea Specialistica in Ingegneria Informatica Corso di Ingegneria del Software A. A. 2008 - I Diagrammi di Flusso OO Generalità I diagrammi di attività vengono usati per modellare processi a
Corso di Laurea Specialistica in Ingegneria Informatica Corso di Ingegneria del Software A. A. 2008 - I Diagrammi di Flusso OO Generalità I diagrammi di attività vengono usati per modellare processi a
Introduzione alla programmazione Algoritmi e diagrammi di flusso. Sviluppo del software
 Introduzione alla programmazione Algoritmi e diagrammi di flusso F. Corno, A. Lioy, M. Rebaudengo Sviluppo del software problema idea (soluzione) algoritmo (soluzione formale) programma (traduzione dell
Introduzione alla programmazione Algoritmi e diagrammi di flusso F. Corno, A. Lioy, M. Rebaudengo Sviluppo del software problema idea (soluzione) algoritmo (soluzione formale) programma (traduzione dell
Problemi, algoritmi, calcolatore
 Problemi, algoritmi, calcolatore Informatica e Programmazione Ingegneria Meccanica e dei Materiali Università degli Studi di Brescia Prof. Massimiliano Giacomin Problemi, algoritmi, calcolatori Introduzione
Problemi, algoritmi, calcolatore Informatica e Programmazione Ingegneria Meccanica e dei Materiali Università degli Studi di Brescia Prof. Massimiliano Giacomin Problemi, algoritmi, calcolatori Introduzione
NOTE DI ALGEBRA LINEARE v = a 1 v a n v n, w = b 1 v b n v n
 NOTE DI ALGEBRA LINEARE 2- MM 9 NOVEMBRE 2 Combinazioni lineari e generatori Sia K un campo e V uno spazio vettoriale su K Siano v,, v n vettori in V Definizione Un vettore v V si dice combinazione lineare
NOTE DI ALGEBRA LINEARE 2- MM 9 NOVEMBRE 2 Combinazioni lineari e generatori Sia K un campo e V uno spazio vettoriale su K Siano v,, v n vettori in V Definizione Un vettore v V si dice combinazione lineare
INFORMATICA AA Università degli Studi di Ferrara Facoltà di Scienze MM FF NN Corso di Laurea in «Scienze e Tecnologie per i Beni Culturali»
 Università degli Studi di Ferrara Facoltà di Scienze MM FF NN Corso di Laurea in «Scienze e Tecnologie per i Beni Culturali» AA 2010-2011 INFORMATICA Prof. Giorgio Poletti giorgio.poletti@unife.it Grafi
Università degli Studi di Ferrara Facoltà di Scienze MM FF NN Corso di Laurea in «Scienze e Tecnologie per i Beni Culturali» AA 2010-2011 INFORMATICA Prof. Giorgio Poletti giorgio.poletti@unife.it Grafi
Automazione. 20 Gennaio 2016
 Automazione 2 Gennaio 216 Esercizio 1 Un motore elettrico aziona attraverso un organo di trasmissione e riduzione del moto un carico costituito da un braccio robotico che ruota in un piano orizzontale.
Automazione 2 Gennaio 216 Esercizio 1 Un motore elettrico aziona attraverso un organo di trasmissione e riduzione del moto un carico costituito da un braccio robotico che ruota in un piano orizzontale.
Introduzione alla programmazione
 Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Macchine sequenziali. Automa a Stati Finiti (ASF)
") Corso di Calcolatori Elettronici I Macchine sequenziali Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie dell Informazione Corso
Corso di Calcolatori Elettronici I Macchine sequenziali Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle Tecnologie dell Informazione Corso
Il concetto di calcolatore e di algoritmo
 Il concetto di calcolatore e di algoritmo Elementi di Informatica e Programmazione Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Informatica
Il concetto di calcolatore e di algoritmo Elementi di Informatica e Programmazione Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Informatica
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
AUTOMAZIONE INDUSTRIALE. Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari
 AUTOMAZIONE INDUSTRIALE Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari Contenuti - I sistemi di produzione - Alcuni cenni storici - La produzione di tipo discreto
AUTOMAZIONE INDUSTRIALE Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari Contenuti - I sistemi di produzione - Alcuni cenni storici - La produzione di tipo discreto
Luigi Piroddi
 Automazione industriale dispense del corso 1. Presentazione del corso piroddi@elet.polimi.it Informazioni organizzative Riferimenti docenti: docente: ufficio: DEIB, 2 piano, uff. 216, telefono: 02-23993556
Automazione industriale dispense del corso 1. Presentazione del corso piroddi@elet.polimi.it Informazioni organizzative Riferimenti docenti: docente: ufficio: DEIB, 2 piano, uff. 216, telefono: 02-23993556
Esercizio d esame Petri e Gantt B
 Esercizio d esame Petri e Gantt B Una cella di lavorazione e montaggio portiere funziona nel seguente modo. Quando sono disponibili una quaterna Q scocca, portiera destra, portiera sinistra, portellone
Esercizio d esame Petri e Gantt B Una cella di lavorazione e montaggio portiere funziona nel seguente modo. Quando sono disponibili una quaterna Q scocca, portiera destra, portiera sinistra, portellone
ANALISI DEI SISTEMI AD EVENTI
 ANALISI DEI SISTEMI AD EVENTI Anno accademico 2014/15 Ludovica Adacher adacher@dia.uniroma3.it Negli ultimi vent anni si è evidenziata la necessità di studiare i sempre più numerosi sistemi realizzati
ANALISI DEI SISTEMI AD EVENTI Anno accademico 2014/15 Ludovica Adacher adacher@dia.uniroma3.it Negli ultimi vent anni si è evidenziata la necessità di studiare i sempre più numerosi sistemi realizzati
Sistemi lineari. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
il ciclo di Ericsson (1853) caratterizzato da due isoterme e due isobare; il ciclo di Reitlinger (1873) con due isoterme e due politropiche.
 caratterizzato da due isoterme e due isobare; il ciclo di Reitlinger (1873) con due isoterme e due politropiche.") 16 Il ciclo di Stirling Il coefficiente di effetto utile per il ciclo frigorifero di Carnot è, in base alla (2.9): T min ɛ =. (2.31) T max T min Il ciclo di Carnot è il ciclo termodinamico che dà il maggior
16 Il ciclo di Stirling Il coefficiente di effetto utile per il ciclo frigorifero di Carnot è, in base alla (2.9): T min ɛ =. (2.31) T max T min Il ciclo di Carnot è il ciclo termodinamico che dà il maggior
Proprietà strutturali: Controllabilità e Osservabilità
 CONTROLLI AUTOMATICI LS Ingegneria Informatica Proprietà strutturali: Controllabilità e Osservabilità Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: claudio.melchiorri@deis.unibo.it
CONTROLLI AUTOMATICI LS Ingegneria Informatica Proprietà strutturali: Controllabilità e Osservabilità Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: claudio.melchiorri@deis.unibo.it
Analisi matriciale delle reti di Petri (P/T) - sifoni e trappole -
 - sifoni e trappole -") Analisi matriciale delle reti di Petri (P/T) - sifoni e trappole - - richiami preliminari sulle proprietà strutturali - Abbiamo visto che alcune caratteristiche dei sistemi dinamici (DES compresi) non
Analisi matriciale delle reti di Petri (P/T) - sifoni e trappole - - richiami preliminari sulle proprietà strutturali - Abbiamo visto che alcune caratteristiche dei sistemi dinamici (DES compresi) non
Algoritmi e Complessità
 Algoritmi e Complessità Università di Camerino Corso di Laurea in Informatica (tecnologie informatiche) III periodo didattico Docente: Emanuela Merelli Email:emanuela.merelli@unicam.it a.a. 2002-03 e.merelli
Algoritmi e Complessità Università di Camerino Corso di Laurea in Informatica (tecnologie informatiche) III periodo didattico Docente: Emanuela Merelli Email:emanuela.merelli@unicam.it a.a. 2002-03 e.merelli
Introduzione alle Reti di Petri
 Università degli Studi di Padova FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria dell Informazione Tesi di laurea triennale Introduzione alle Reti di Petri Candidato: Elena Zanotto Matricola 591936
Università degli Studi di Padova FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria dell Informazione Tesi di laurea triennale Introduzione alle Reti di Petri Candidato: Elena Zanotto Matricola 591936
Sequential Functional Chart
 Sequential Functional Chart Nel 1975 nasce il GRAFCET GRAPHe de Coordination Etapes Transitions Nel 1987 è stato adottato come standard internazionale dall IEC (Comitato Elettrotecnico Internazionale)
Sequential Functional Chart Nel 1975 nasce il GRAFCET GRAPHe de Coordination Etapes Transitions Nel 1987 è stato adottato come standard internazionale dall IEC (Comitato Elettrotecnico Internazionale)
3.3 Problemi di PLI facili
 3.3 Problemi di PLI facili Consideriamo un generico problema di PLI espresso in forma standard min{c t x : Ax = b, x Z n +} (1) dove A Z m n con n m, e b Z m. Supponiamo che A sia di rango pieno. Sia P
3.3 Problemi di PLI facili Consideriamo un generico problema di PLI espresso in forma standard min{c t x : Ax = b, x Z n +} (1) dove A Z m n con n m, e b Z m. Supponiamo che A sia di rango pieno. Sia P
Modelli e Metodi per la Simulazione (MMS)
") Modelli e Metodi per la Simulazione (MMS) adacher@dia.uniroma3.it Programma La simulazione ad eventi discreti, è una metodologia fondamentale per la valutazione delle prestazioni di sistemi complessi (di
Modelli e Metodi per la Simulazione (MMS) adacher@dia.uniroma3.it Programma La simulazione ad eventi discreti, è una metodologia fondamentale per la valutazione delle prestazioni di sistemi complessi (di
Ingegneria Elettrica Politecnico di Torino. Luca Carlone. ControlliAutomaticiI LEZIONE I
 Ingegneria Elettrica Politecnico di Torino Luca Carlone ControlliAutomaticiI LEZIONE I Sommario LEZIONE I Introduzione al concetto di sistema Notazione e tassonomia Rappresentazione in variabili di stato
Ingegneria Elettrica Politecnico di Torino Luca Carlone ControlliAutomaticiI LEZIONE I Sommario LEZIONE I Introduzione al concetto di sistema Notazione e tassonomia Rappresentazione in variabili di stato
Elementi di memoria Ciascuno di questi circuiti è caratterizzato dalle seguenti proprietà:
 I circuiti elettronici capaci di memorizzare un singolo bit sono essenzialmente di due tipi: LATCH FLIP-FLOP. Elementi di memoria Ciascuno di questi circuiti è caratterizzato dalle seguenti proprietà:
I circuiti elettronici capaci di memorizzare un singolo bit sono essenzialmente di due tipi: LATCH FLIP-FLOP. Elementi di memoria Ciascuno di questi circuiti è caratterizzato dalle seguenti proprietà:
Programmazione Lineare: problema del trasporto Ing. Valerio Lacagnina
 Problemi di trasporto Consideriamo un problema di programmazione lineare con una struttura matematica particolare. Si può utilizzare, per risolverlo, il metodo del simplesso ma è possibile realizzare una
Problemi di trasporto Consideriamo un problema di programmazione lineare con una struttura matematica particolare. Si può utilizzare, per risolverlo, il metodo del simplesso ma è possibile realizzare una
Catene di Markov a tempo continuo. Richiami teorici
 Catene di Marov a tempo continuo Richiami teorici Pagina di 55 Data ultima revisione 2/5/ Definizione di catena di Marov a Una catena di Marov a è definita come: M(X, P(t)) t R + dove gli stati x,...,
Catene di Marov a tempo continuo Richiami teorici Pagina di 55 Data ultima revisione 2/5/ Definizione di catena di Marov a Una catena di Marov a è definita come: M(X, P(t)) t R + dove gli stati x,...,
Vincenzo Gervasi, Laura Semini Ingegneria del Software Dipartimento di Informatica Università di Pisa
 Vincenzo Gervasi, Laura Semini Ingegneria del Software Dipartimento di Informatica Università di Pisa Lezioni precedente: Descrizione del dominio: modello statico Questa lezione Descrizione del dominio:
Vincenzo Gervasi, Laura Semini Ingegneria del Software Dipartimento di Informatica Università di Pisa Lezioni precedente: Descrizione del dominio: modello statico Questa lezione Descrizione del dominio:
Automazione. 17 Gennaio 2019
 Automazione 17 Gennaio 2019 Esercizio 1 Una linea di produzione deve gestire cinque prodotti {A, B, C, D, E} che necessitano di due lavorazioni complesse in sequenza, la prima effettuata dalla macchina
Automazione 17 Gennaio 2019 Esercizio 1 Una linea di produzione deve gestire cinque prodotti {A, B, C, D, E} che necessitano di due lavorazioni complesse in sequenza, la prima effettuata dalla macchina
1) Codici convoluzionali. 2) Circuito codificatore. 3) Diagramma a stati e a traliccio. 4) Distanza libera. 5) Algoritmo di Viterbi
 Codici convoluzionali. 2) Circuito codificatore. 3) Diagramma a stati e a traliccio. 4) Distanza libera. 5) Algoritmo di Viterbi") Argomenti della Lezione 1) Codici convoluzionali 2) Circuito codificatore 3) Diagramma a stati e a traliccio 4) Distanza libera 5) Algoritmo di Viterbi 1 Codici convoluzionali I codici convoluzionali sono
Argomenti della Lezione 1) Codici convoluzionali 2) Circuito codificatore 3) Diagramma a stati e a traliccio 4) Distanza libera 5) Algoritmo di Viterbi 1 Codici convoluzionali I codici convoluzionali sono
Algoritmi e soluzione di problemi
 Algoritmi e soluzione di problemi Dato un problema devo trovare una soluzione. Esempi: effettuare una telefonata calcolare l area di un trapezio L algoritmo è la sequenza di operazioni (istruzioni, azioni)
Algoritmi e soluzione di problemi Dato un problema devo trovare una soluzione. Esempi: effettuare una telefonata calcolare l area di un trapezio L algoritmo è la sequenza di operazioni (istruzioni, azioni)
Risolvere un problema significa individuare un procedimento che permetta di arrivare al risultato partendo dai dati Termine algoritmo da:
 Algoritmi Algoritmi Risolvere un problema significa individuare un procedimento che permetta di arrivare al risultato partendo dai dati Termine algoritmo da: http://it.wikipedia.org/wiki/al-khwarizmi Un
Algoritmi Algoritmi Risolvere un problema significa individuare un procedimento che permetta di arrivare al risultato partendo dai dati Termine algoritmo da: http://it.wikipedia.org/wiki/al-khwarizmi Un
HYPENS: Simulatore di Reti di Petri ibride
 HYPENS: Simulatore di Reti di Petri ibride Maria Paola Cabasino DIEE, University of Cagliari Novembre 10 Maria Paola Cabasino (DIEE) HYPENS Novembre 10 1 / 21 Rete di Petri ibrida HYPENS: Hybrid Petri
HYPENS: Simulatore di Reti di Petri ibride Maria Paola Cabasino DIEE, University of Cagliari Novembre 10 Maria Paola Cabasino (DIEE) HYPENS Novembre 10 1 / 21 Rete di Petri ibrida HYPENS: Hybrid Petri