Il controllo specificato come microprogramma
|
|
|
- Adelmo Fortunato
- 5 anni fa
- Visualizzazioni
Transcript
1 Il controllo specificato come microprogramma Nella pratica, set istruzioni più numeroso o istruzioni più complesse (cfr. Intel) drastico aumento del numero degli stati Impraticabile rappresentare gli stati esplicitamente! Idea: molti di questi stati raggiungibile in modo sequenziale (es. precedente: da stato_0 si passa sempre a stato_1 a prescindere da ingressi) Cfr. concetti della programmazione Rappresentazione dei segnali di controllo al datapath come microistruzioni eseguite in un microprogramma. Microistruzioni eseguite in sequenza + salti Nel caso di molti stati, porta ad una significativa semplificazione nella specifica del controllo! Inoltre, come vedremo questa specifica ha una naturale realizzazione che può essere più economica di una FSM in diversi casi 71
2 Nota bene: Abbiamo: un particolare datapath ISA (che include il formato delle istruzioni macchina) Dobbiamo specificare l unità di controllo! Solo dopo verrà illustrata la realizzazione. 72
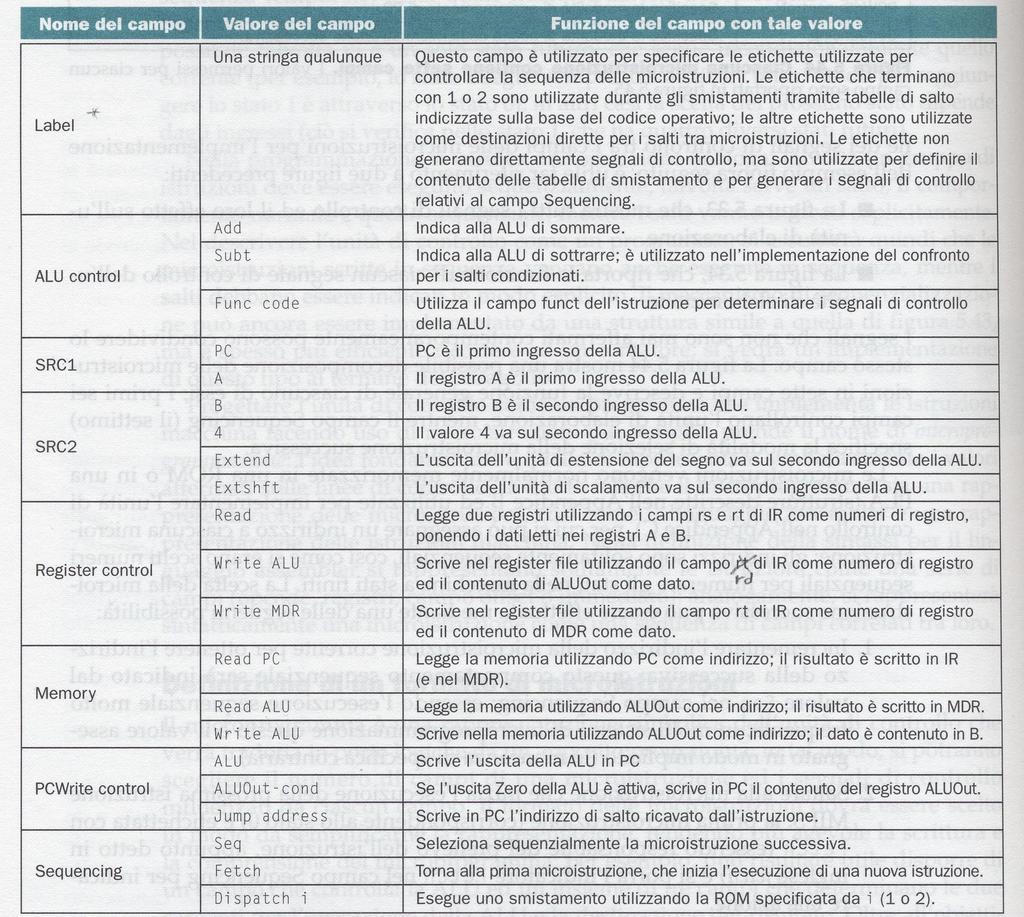
3 Passi necessari: 1) Definire Formato (rappresentazione simbolica) delle microistruzioni: - Sequenza di campi distinti - Valori (simbolici) che ogni campo può assumere - Segnali di controllo associati a ciascun campo Obiettivi: - leggibilità del microprogramma ciascun campo associato ad una funzione specifica [es. 1 campo per operaz. ALU, 3 per scelta sorgenti e destinazione] - impedire scrittura microistruzioni incoerenti / istruzioni non supportate campi diversi per insiemi disgiunti di segnali di controllo; NB: Segnali non usati in modo completamente indipendente possono essere associati allo stesso campo (per minimizzare lunghezza delle microistruzioni), mentre gruppi di segnali indipendenti vanno associati a campi distinti 73
4 74
5 Notare che: In Register control sono previsti due possibili valori per la scrittura dei registri: - Write ALU: scrive nel registro rd il contenuto di ALUout [usato nelle istruzioni di Tipo-R] - Write MDR: scrive nel registro rt il contenuto di MDR [usato nell istruzione lw] Sono quindi escluse le combinazioni: - scrittura in rt del contenuto di ALUout - scrittura in rd del contenuto di MDR possibili con il datapath progettato ma non usate in istruzioni MIPS considerate. In Memory i valori previsti non permettono ad esempio di: - leggere la memoria indirizzata da ALUout e scrivere il valore letto in IR - scrivere in memoria (il dato contenuto in B) nella locazione indirizzata da PC 75
 Comandi non specificati: - a elementi di memoria (lettura e scrittura): = 0 - a MUX e controllo elementi combinatori (ALU): = don t care IRWrite")
6 A ciascun campo (a parte Sequencing) possiamo già associare segnali di controllo, il cui valore è determinato dal valore simbolico del campo stesso (cfr. Assembler vs. Linguaggio Macchina) Comandi non specificati: - a elementi di memoria (lettura e scrittura): = 0 - a MUX e controllo elementi combinatori (ALU): = don t care IRWrite 76
7 2) Creare Microprogramma: rappresentazione simbolica del controllo traducibile automaticamente in circuiti logici di controllo. Possibilità di verifica consistenza interna (non contraddittorietà) ed esterna (rispetto ai requisiti). Nel caso MIPS il microprogramma corrisponde esattamente al diagramma degli stati individuato nella specifica del processore come FSM. NB: Ciò fa già capire come la realizzazione possa essere effettuata mediante: - sequenzializzatore - macchina a stati finiti! 77

8 Write MDR Read ALU Write ALU Write ALU Fetch 78
9 Note: Nel microprogramma, le microistruzioni sono disposte in sequenza. Ciascuna istruzione può essere etichettata da una label (campo Label) che serve ad identificarla nei salti. Scelta della microistruzione successiva dipende da campo Sequencing: - Seq: eseguita l istruzione successiva nel microprogramma - Fetch: eseguita la microistruzione di fetch, etichettata con label Fetch, che di fatto corrisponde all esecuzione di una nuova istruzione MIPS - Dispatch i: l istruzione successiva viene scelta, sulla base degli ingressi (campo opcode di IR), entro la tabella di smistamento i. Ciascuna tabella contiene la corrispondenza ingresso label della istruzione cui saltare Le label nel campo Label terminano con un numero i indicante la tabella di smistamento in cui sono contenute (vedi microprogramma). 79

10 Oltre al microprogramma, dobbiamo definire le tabelle di smistamento (forma simbolica) - sulla base di ciascun possibile valore di opcode, a quale istruzione si salta - Con ciò la specifica è completa: - formato microistruzioni - associazione valori campi di controllo - segnali controllo a datapath - microprogramma - tabelle di smistamento Cfr. Ling. Macchina Cfr. Ling. Assembler 80
11 REALIZZAZIONE DELLA SPECIFICA CON MICROPROGRAMMA Dobbiamo decidere come realizzare: - funzione di sequenzializzazione (determina la sequenza di computazione) - funzione di controllo (determina le uscite di controllo Data Path) Esistono due modalità di realizzazione: - come macchina a stati finiti: Funzione di controllo = funzione di uscita [con PLA o ROM] Funzione di sequenzializzazione = funzione di stato futuro [con PLA o ROM] funzione stato futuro codifica esplicitamente lo stato NB: vedremo brevemente questa tecnica alla fine - Usando una ROM per memorizzare la funzione di controllo ed un contatore che fornisce in maniera sequenziale lo stato futuro (indirizzo microistruzione): si elimina la codifica esplicita dello stato futuro all interno dell unità di controllo Controllo microprogrammato 81
12 Controllo Microprogrammato Durante l esecuzione di un programma applicativo i circuiti interpretano iterativamente il microprogramma sulle istruzioni del < programma applicativo i servizi OS>. clock Unità di Controllo 1 Microprogramma (ROM o PLA) Contatore di microprogramma Logica selezione dell indirizzo P C Memoria indirizzo Programma applicativo Registro Istruzioni Istruzione [31-26] Unità di Os Servizi elaborazione 82
13 Logica di selezione dell indirizzo, sulla base del segnale di controllo proveniente da microistruzione corrente, sceglie l indirizzo successivo tra: - stato (indirizzo) incrementato - stato 0 (di fetch) - stato determinato da tabelle di dispatch funzione di opcode Segnale di controllo AddrCtl a due bit (proveniente da microistruzione). PLA or ROM 1 Adder State Mux AddrCtl 0 Dispatch ROM 2 Dispatch ROM 1 Address select logic Op Instruction register opcode field 83
14 A questo punto possiamo associare i valori simbolici del campo Sequencing al segnale di controllo AddCtl: - Seq AddCtl = 11 - Fetch AddCtl = 00 - Dispatch 1 AddCtl = 01 - Dispatch 2 AddCtl = 10 Abbiamo quindi la corrispondenza completa valori campi-segnali Fase successiva: corrisponde alla compilazione del Linguaggio Assembler in LM Microprogramma in forma simbolica Tabelle di smistamento (simboliche) Formato microistruzioni Associazione campi - segnali ASSEMBLATORE DI MICROCODICE Specifica - ROM di controllo - ROM di smistamento 84
15 1) Traduzione dei campi di ogni microistruzione nei segnali corrisponenti: da microprogramma + tabella di associazione campi-segnali 2) Assegnare indirizzi alle microistruzioni [mantenendo sequenzialità] Specifica ROM di controllo: ogni parola corrisponde a una microistruzione Mantenendo l ordine nel microprogramma (coincidente con codifica stati FSM): Bit 17-2: bit di controllo (NB: corrispondenti a ciascuno stato del diagramma) Bit 1-0: bit di controllo indirizzo: associati a campo Sequencing della microistruzione 85
 NB: gli altri elementi delle ROM [ciascuna con 2 6 * 4 bit] sono vuote in questo caso [perché si sono considerate solo poche")
16 3) Specifica delle ROM di Smistamento da tabelle di smistamento simboliche + indirizzi assegnati alle istruzioni (Tabella label - indirizzo) NB: gli altri elementi delle ROM [ciascuna con 2 6 * 4 bit] sono vuote in questo caso [perché si sono considerate solo poche istruzioni] 86
17 Controllo microprogrammato (realizzato con sequenzializzatore): valutazione Specifica come macchina a stati finiti: abbiamo visto che, nel caso delle 2 ROM: 2 4 * * 4 = uscita stato futuro 6% 94% Istruzioni complesse (p.es. virgola mobile) sono caratterizzate da sequenze di stati indipendenti da ingressi (opcode); all aumentare del set di istruzioni disponibili, queste sequenze diventano via via più frequenti Inoltre, complessità e numerosità delle istruzioni porta ad aumento numero stati totali In una macchina a stati, la funzione di stato futuro deve comunque codificare tutte le transizioni stato-stato: anche per quelle indipendenti da ingressi lo stato destinazione deve essere esplicitamente codificato; in una tabella di verità, vi sarà una riga per ogni transizione [opcode don t care]. Nel controllo microprogrammato, la funzione di controllo ha solo due bit in più per decidere la modalità di selezione: transizioni sequenziali non codificano esplicitamente lo stato destinazione, ma solo che bisogna scegliere il seguente. Le ROM di Smistamento memorizzano solo stati cui si arriva in dipendenza dall ingresso! Stati in sequenza non codificati, semplificando unità di controllo wrt. FSM VEDIAMO IN DETTAGLIO 87
18 Implementazione di controllo e smistamento tramite ROM: dimensioni ROM di controllo: 10 microistruzioni 4 bit di indirizzo ciascuna parola (microistruzione) 16+2 = 18 bit Dimensione: 2 4 * 18 = 288 bit ROM di smistamento: indirizzate da Opcode 6 bit di indirizzo ciascuna parola ha 4 bit Dimensione: 2 6 * 4 = 256 bit Dimensione totale = *256 = 800 bit 88
19 Implementazione di controllo e smistamento tramite PLA: dimensioni PLA di controllo: funzione stato (4 bit) bit di controllo di indirizzo Avevamo visto che per 16 uscite si usano 10 mintermini (tutti i 10 stati); quindi i 2 bit di controllo di indirizzo useranno parte di questi mintermini Dimensione: = 4* *18 = 220 PLA di smistamento 1: funzione bit di opcode (6 bit) 4 bit di indirizzo [stato] dalla specifica ROM di smistamento 1 si vede che ci sono 5 combinazioni di opcode che interessano: 5 mintermini Dimensione: = 6*5 + 5*4 = 50 PLA di smistamento 2: funzione bit di opcode (6 bit) 4 bit di indirizzo [stato] da specifica ROM di smistamento 2 si vede che ci sono 2 combinazioni di opcode che interessano: 2 mintermini Dimensione: = 6*2 + 2*4 = 20 Dimensione totale = =
20 Confronto con implementazione a stato esplicito Tramite ROM: Controllo Stato futuro/ smistamento Totale Stato esplicito K Microprog Tramite PLA: Controllo Stato futuro/ smistamento Totale Stato esplicito Microprog Lieve aumento della dimensione per il controllo (dovuta all introduzione dei segnali AddrCt per la scelta della microistruzione successiva) compensato dalla diminuzione della dimensione per stato futuro 90
21 Ottimizzazioni della logica di controllo Favorite dall uso di strumenti CAD ma anche da opportune scelte di progettazione: Minimizzazione logica delle funzioni di controllo e smistamento: - sfruttamento dei termini don t care - individuazione di segnali di ingresso che identificano istruzioni [nell esempio lw e sw sono gli unici ad avere Op5=1] semplificando ROM/PLA di smistamento: favorita da scelta progettuale che assegna codici operativi correlati ad istruzioni che condividono stessi stati (stesse microistruzioni) Assegnazione degli stati: stati (indirizzi delle microistruzioni) scelti in modo da semplificare equazioni che legano gli stati alle uscite di controllo [l assemblatore di microcodice può assegnare indirizzi in modo opportuno nel rispetto dei vincoli di sequenzialità delle microistruzioni] 91
22 Riduzione della memoria di controllo mediante tecniche di codifica: riduzione ampiezza delle microistruzioni: - Gruppi di linee nelle microistruzioni possono essere codificate in un minor numero di bit. Es. solo uno tra i 6 bit 13-8 della parola di controllo è attivo: codifica in 3 bit NB: tempo di decodifica di solito trascurabile, costo HW decoder compensato da riduzione costo memoria di controllo - uso di un campo formato delle microistruzioni (formati diversi per microistruzioni!) [fornisce valori di default per segnali di controllo non specificati] p. es. formato per microistruzioni di accesso in memoria e formato per operaz. ALU (specifica implicitamente no read/write memoria) 92
23 In generale: Microcodice orizzontale (minimamente codificato) - più flessibile (può specificare qualunque combinazione di segnali) - aumenta costo dell HW (memoria di controllo più ampia) - favorisce buoni T clock e CPI [ma attenzione a memoria di controllo!] VS. Microcodice verticale (massimamente codificato) - minor costo HW (costo decodificatori < riduzione costo memoria) - peggiori prestazioni (tempo di decodifica che può far aumentare T clock + riduzione combinazioni possibili di segnali nella stessa microistruzione che può richiedere un maggior CPI) 93
24 NB: ABBIAMO VISTO Processore multi-ciclo [Unità di controllo sequenziale] - specifica come FSM e implementazione come FSM - specifica come microprogramma e implementazione con sequenzializzatore Sono possibili anche gli altri due passaggi! specifica come microprogramma e implementazione come FSM Ogni istruzione corrisponde ad uno stato: codifica (numerica) dello stato dai valori dei campi di controllo delle microistruzioni deriva la funzione: stato uscita [funzione di uscita] dal campo Sequencing di una microistruzione (stato) + tabelle smistamento simboliche [che codificano istruzione futura sulla base di ingressi opcode] deriva la funzione: stato*ingressi stato futuro [funzione di stato futuro] 94
25 specifica come FSM e implementazione con sequenzializzatore Ogni stato corrisponde ad una microistruzione: assegnazione di un ordine agli stati (conviene: transizioni tra stati indipendenti dall ingresso stati posti in sequenza!) dalla funzione di uscita derivano per ogni microistruzione i segnali di controllo da attivare dalla funzione di stato futuro si può stabilire se vi sia un unica transizione verso la microistruzione seguente, verso la microistruzione di fetch o se la transizione dipenda dall ingresso [tabella di smistamento], ovvero: campo Sequencing tabelle di smistamento NB: l uso di strumenti automatici per la realizzazione (in grado di applicare tecniche di ottimizzazione) rende le fasi di specifica e realizzazione relativamente indipendenti! Si può scegliere la specifica che risulta più semplice e gestibile 95
26 Controllo di un processore-multiciclo: Riepilogo specifica e realizzazione Initial representation Finite state diagram Microprogram Sequencing control Explicit next state function Microprogram counter + dispatch ROMS Logic representation Logic equations Truth tables Implementation technique Programmable logic array Read only memory 96
27 Modalità di rappresentazione: scelte per ragioni di semplicità progettuale Realizzazione di stato futuro: sequenzializzatore più efficiente all aumentare del numero di stati e delle sequenze composte da stati consecutivi senza salti Realizzazione logica di controllo [parti combinatorie]: PLA sono più efficienti (vantaggio non sussiste se ROM è densa) ROM è soluzione più adeguata se funzione di controllo è in un chip diverso rispetto a unità di elaborazione (possibilità di cambiare microcodice indipendentemente dal resto del processore) NB: di fatto per ragioni di efficienza l unità di controllo è oggi sempre implementata nello stesso chip. Inoltre, con CAD difficoltà di progettazione PLA non sussiste più. NB2: CACHE ROM di microcodice non molto più veloce di RAM con LM: se microprogramma non è efficiente, sequenze di istruzioni macchina possono essere più efficienti di una corrispondente istruzione complessa! 97
Calcolatori Elettronici A a.a. 2008/2009
 Calcolatori Elettronici A a.a. 28/29 CPU multiciclo Massimiliano Giacomin Esempi di processori che usano controllo a singolo ciclo: NESSUNO! Perché? Periodo di clock: abbastanza lungo per garantire la
Calcolatori Elettronici A a.a. 28/29 CPU multiciclo Massimiliano Giacomin Esempi di processori che usano controllo a singolo ciclo: NESSUNO! Perché? Periodo di clock: abbastanza lungo per garantire la
Calcolatori Elettronici B a.a. 2006/2007
 Calcolatori Elettronici B a.a. 26/27 Tecniche di Controllo Massimiliano Giacomin Schema del processore (e memoria) Durante l esecuzione di un programma applicativo Pa, i circuiti interpretano le istruzioni
Calcolatori Elettronici B a.a. 26/27 Tecniche di Controllo Massimiliano Giacomin Schema del processore (e memoria) Durante l esecuzione di un programma applicativo Pa, i circuiti interpretano le istruzioni
Calcolatori Elettronici B a.a. 2007/2008
 Calcolatori Elettronici B a.a. 27/28 Tecniche di Controllo Massimiliano Giacomin Schema del processore (e memoria) Durante l esecuzione di un programma applicativo Pa, i circuiti interpretano le istruzioni
Calcolatori Elettronici B a.a. 27/28 Tecniche di Controllo Massimiliano Giacomin Schema del processore (e memoria) Durante l esecuzione di un programma applicativo Pa, i circuiti interpretano le istruzioni
Calcolatori Elettronici B a.a. 2005/2006
 Calcolatori Elettronici B a.a. 25/26 Tecniche di Controllo Massimiliano Giacomin Architetture descrivono il calcolatore a diversi livelli di astrazione Livello del linguaggio specializzato Ls Traduzione
Calcolatori Elettronici B a.a. 25/26 Tecniche di Controllo Massimiliano Giacomin Architetture descrivono il calcolatore a diversi livelli di astrazione Livello del linguaggio specializzato Ls Traduzione
Lezione 29 Il processore: unità di controllo (2)
") Lezione 29 Il processore: unità di lo (2) Vittorio Scarano Architettura Corso di Laurea in Informatica Università degli Studi di Salerno Organizzazione della lezione 2 Un riepilogo: ruolo della unità di
Lezione 29 Il processore: unità di lo (2) Vittorio Scarano Architettura Corso di Laurea in Informatica Università degli Studi di Salerno Organizzazione della lezione 2 Un riepilogo: ruolo della unità di
Un quadro della situazione. Lezione 28 Il Processore: unità di controllo (2) Dove siamo nel corso. Organizzazione della lezione. Cosa abbiamo fatto
 Dove siamo nel corso. Organizzazione della lezione. Cosa abbiamo fatto") Un quadro della situazione Lezione 28 Il Processore: unità di lo (2) Vittorio Scarano rchitettura Corso di Laurea in Informatica Università degli Studi di Salerno Input/Output Sistema di Interconnessione
Un quadro della situazione Lezione 28 Il Processore: unità di lo (2) Vittorio Scarano rchitettura Corso di Laurea in Informatica Università degli Studi di Salerno Input/Output Sistema di Interconnessione
Il processore: unità di controllo
 Il processore: unità di lo Architetture dei Calcolatori (lettere A-I) L unità di lo L unità di lo è responsabile della generazione dei segnali di lo che vengono inviati all unità di elaborazione Alcune
Il processore: unità di lo Architetture dei Calcolatori (lettere A-I) L unità di lo L unità di lo è responsabile della generazione dei segnali di lo che vengono inviati all unità di elaborazione Alcune
Step I: equazioni logiche per ogni singola uscita
 SCO MIPS Multiciclo Logica Combinatoria di Controllo Registro di Stato Corrente Uscite: Segnali di Controllo (SC) Stato Futuro (SF) Modello Moore: SC dipende solo da stato corrente SF dipende anche da
SCO MIPS Multiciclo Logica Combinatoria di Controllo Registro di Stato Corrente Uscite: Segnali di Controllo (SC) Stato Futuro (SF) Modello Moore: SC dipende solo da stato corrente SF dipende anche da
Calcolatori Elettronici
 Calcolatori Elettronici CPU multiciclo Massimiliano Giacomin SVANTAGGI DEL PROCESSORE A SINGOLO CICLO Tutte le istruzioni lunghe un ciclo di clock T clock determinato dall istruzione più lenta Istruzioni
Calcolatori Elettronici CPU multiciclo Massimiliano Giacomin SVANTAGGI DEL PROCESSORE A SINGOLO CICLO Tutte le istruzioni lunghe un ciclo di clock T clock determinato dall istruzione più lenta Istruzioni
ALU e Control Unit. ALU e Control Unit
 Massimo VIOLANTE Politecnico di Torino Dipartimento di Automatica e Informatica Sommario Unità aritmentica/logica Unità di controllo. 2 M. Violante 1.1 Unità aritmetica/logica Contiene tutti i circuiti
Massimo VIOLANTE Politecnico di Torino Dipartimento di Automatica e Informatica Sommario Unità aritmentica/logica Unità di controllo. 2 M. Violante 1.1 Unità aritmetica/logica Contiene tutti i circuiti
Processore. Memoria I/O. Control (Parte di controllo) Datapath (Parte operativa)
 Datapath (Parte operativa)") Processore Memoria Control (Parte di controllo) Datapath (Parte operativa) I/O Memoria La dimensione del Register File è piccola registri usati per memorizzare singole variabili di tipo semplice purtroppo
Processore Memoria Control (Parte di controllo) Datapath (Parte operativa) I/O Memoria La dimensione del Register File è piccola registri usati per memorizzare singole variabili di tipo semplice purtroppo
Il processore: unità di elaborazione
 Il processore: unità di elaborazione Architetture dei Calcolatori (lettere A-I) Progettazione dell unità di elaborazioni dati e prestazioni Le prestazioni di un calcolatore sono determinate da: Numero
Il processore: unità di elaborazione Architetture dei Calcolatori (lettere A-I) Progettazione dell unità di elaborazioni dati e prestazioni Le prestazioni di un calcolatore sono determinate da: Numero
Progettazione dell unità di elaborazioni dati e prestazioni. Il processore: unità di elaborazione. I passi per progettare un processore
 Il processore: unità di elaborazione Architetture dei Calcolatori (lettere A-I) Progettazione dell unità di elaborazioni dati e prestazioni Le prestazioni di un calcolatore sono determinate da: Numero
Il processore: unità di elaborazione Architetture dei Calcolatori (lettere A-I) Progettazione dell unità di elaborazioni dati e prestazioni Le prestazioni di un calcolatore sono determinate da: Numero
Calcolatori Elettronici B a.a. 2004/2005
 Calcolatori Elettronici B a.a. 2004/2005 RETI LOGICHE: RICHIAMI Massimiliano Giacomin 1 Unità funzionali Unità funzionali: Elementi di tipo combinatorio: - valori di uscita dipendono solo da valori in
Calcolatori Elettronici B a.a. 2004/2005 RETI LOGICHE: RICHIAMI Massimiliano Giacomin 1 Unità funzionali Unità funzionali: Elementi di tipo combinatorio: - valori di uscita dipendono solo da valori in
CPU a singolo ciclo. Lezione 18. Sommario. Architettura degli Elaboratori e delle Reti
 Architettura degli Elaboratori e delle Reti Lezione 18 CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 18 1/2 Sommario!
Architettura degli Elaboratori e delle Reti Lezione 18 CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 18 1/2 Sommario!
Architettura degli Elaboratori Lez. 8 CPU MIPS a 1 colpo di clock. Prof. Andrea Sterbini
 Architettura degli Elaboratori Lez. 8 CPU MIPS a 1 colpo di clock Prof. Andrea Sterbini sterbini@di.uniroma1.it Argomenti Progetto della CPU MIPS a 1 colpo di clock - Istruzioni da implementare - Unità
Architettura degli Elaboratori Lez. 8 CPU MIPS a 1 colpo di clock Prof. Andrea Sterbini sterbini@di.uniroma1.it Argomenti Progetto della CPU MIPS a 1 colpo di clock - Istruzioni da implementare - Unità
L'architettura del processore MIPS
 L'architettura del processore MIPS Piano della lezione Ripasso di formati istruzione e registri MIPS Passi di esecuzione delle istruzioni: Formato R (istruzioni aritmetico-logiche) Istruzioni di caricamento
L'architettura del processore MIPS Piano della lezione Ripasso di formati istruzione e registri MIPS Passi di esecuzione delle istruzioni: Formato R (istruzioni aritmetico-logiche) Istruzioni di caricamento
Un quadro della situazione. Lezione 14 Il Set di Istruzioni (2) Dove siamo nel corso. I principi di progetto visti finora. Cosa abbiamo fatto
 Dove siamo nel corso. I principi di progetto visti finora. Cosa abbiamo fatto") Un quadro della situazione Lezione 14 Il Set di Istruzioni (2) Vittorio Scarano Architettura Corso di Laurea in Informatica Università degli Studi di Salerno Input/Output Sistema di Interconnessione Registri
Un quadro della situazione Lezione 14 Il Set di Istruzioni (2) Vittorio Scarano Architettura Corso di Laurea in Informatica Università degli Studi di Salerno Input/Output Sistema di Interconnessione Registri
CPU a singolo ciclo. Lezione 18. Sommario. Architettura degli Elaboratori e delle Reti. Proff. A. Borghese, F. Pedersini
 Architettura degli Elaboratori e delle Reti Lezione 8 CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 8 /33 Sommario! La
Architettura degli Elaboratori e delle Reti Lezione 8 CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 8 /33 Sommario! La
Controllo con macchina a stati finiti
 Controllo con macchina a stati finiti Durante l esecuzione di un programma applicativo i circuiti interpretano le istruzioni: del programma costituito dal< programma applicativo i servizi OS> Logica di
Controllo con macchina a stati finiti Durante l esecuzione di un programma applicativo i circuiti interpretano le istruzioni: del programma costituito dal< programma applicativo i servizi OS> Logica di
CALCOLATORI ELETTRONICI 30 agosto 2010
 CALCOLATORI ELETTRONICI 30 agosto 2010 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche di AND, OR e NOT la funzione combinatoria (a
CALCOLATORI ELETTRONICI 30 agosto 2010 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche di AND, OR e NOT la funzione combinatoria (a
Processore. Memoria I/O. Control (Parte di controllo) Datapath (Parte operativa)
 Datapath (Parte operativa)") Processore Memoria Control (Parte di controllo) Datapath (Parte operativa) I/O Parte di Controllo La Parte Controllo (Control) della CPU è un circuito sequenziale istruzioni eseguite in più cicli di clock
Processore Memoria Control (Parte di controllo) Datapath (Parte operativa) I/O Parte di Controllo La Parte Controllo (Control) della CPU è un circuito sequenziale istruzioni eseguite in più cicli di clock
CPU a ciclo multiplo
 Architettura degli Elaboratori e delle Reti Lezione CPU a ciclo multiplo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 1/8 Sommario! I problemi
Architettura degli Elaboratori e delle Reti Lezione CPU a ciclo multiplo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L 1/8 Sommario! I problemi
Moduli combinatori Barbara Masucci
 Architettura degli Elaboratori Moduli combinatori Barbara Masucci Punto della situazione Ø Abbiamo studiato le reti logiche e la loro minimizzazione Ø Obiettivo di oggi: studio dei moduli combinatori di
Architettura degli Elaboratori Moduli combinatori Barbara Masucci Punto della situazione Ø Abbiamo studiato le reti logiche e la loro minimizzazione Ø Obiettivo di oggi: studio dei moduli combinatori di
Esercitazione del 05/05/ Soluzioni
 Esercitazione del 05/05/2005 - Soluzioni Una CPU a ciclo singolo richiede un ciclo di clock di durata sufficiente a permettere la stabilizzazione del circuito nel caso dell istruzione più complicata (con
Esercitazione del 05/05/2005 - Soluzioni Una CPU a ciclo singolo richiede un ciclo di clock di durata sufficiente a permettere la stabilizzazione del circuito nel caso dell istruzione più complicata (con
Calcolatori Elettronici
 Calcolatori Elettronici Tecniche Pipeline: Elementi di base Massimiliano Giacomin 1 Esecuzione delle istruzioni MIPS con multiciclo: rivisitazione - esame dell istruzione lw (la più complessa) - in rosso
Calcolatori Elettronici Tecniche Pipeline: Elementi di base Massimiliano Giacomin 1 Esecuzione delle istruzioni MIPS con multiciclo: rivisitazione - esame dell istruzione lw (la più complessa) - in rosso
Architettura degli elaboratori - CPU multiciclo A.A. 2016/17. Architettura degli elaboratori
 Università degli Studi dell Insubria Dipartimento di Scienze Teoriche e Applicate Architettura degli elaboratori Marco Tarini Dipartimento di Scienze Teoriche e Applicate marco.tarini@uninsubria.it Progetto
Università degli Studi dell Insubria Dipartimento di Scienze Teoriche e Applicate Architettura degli elaboratori Marco Tarini Dipartimento di Scienze Teoriche e Applicate marco.tarini@uninsubria.it Progetto
Processore. Memoria I/O. Control (Parte di controllo) Datapath (Parte operativa)
 Datapath (Parte operativa)") Processore Memoria Control (Parte di controllo) Datapath (Parte operativa) I/O Memoria La dimensione del Register File è piccola registri usati per memorizzare singole variabili di tipo semplice purtroppo
Processore Memoria Control (Parte di controllo) Datapath (Parte operativa) I/O Memoria La dimensione del Register File è piccola registri usati per memorizzare singole variabili di tipo semplice purtroppo
Calcolatori Elettronici B a.a. 2004/2005
 Calcolatori Elettronici B a.a. 2004/2005 Tecniche di Controllo: Esercizi Massimiliano Giacomin Calcolo CPI e Prestazioni nei sistemi a singolo ciclo e multiciclo ) Calcolo prestazioni nei sistemi a singolo
Calcolatori Elettronici B a.a. 2004/2005 Tecniche di Controllo: Esercizi Massimiliano Giacomin Calcolo CPI e Prestazioni nei sistemi a singolo ciclo e multiciclo ) Calcolo prestazioni nei sistemi a singolo
Architettura degli elaboratori CPU a ciclo singolo
 Architettura degli elaboratori CPU a ciclo singolo Prof. Alberto Borghese Dipartimento di Scienze dell Informazione borghese@di.unimi.it Università degli Studi di Milano Riferimento sul Patterson: capitolo
Architettura degli elaboratori CPU a ciclo singolo Prof. Alberto Borghese Dipartimento di Scienze dell Informazione borghese@di.unimi.it Università degli Studi di Milano Riferimento sul Patterson: capitolo
Progetto CPU a singolo ciclo
 Architettura degli Elaboratori e delle Reti Progetto CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Informatica Università degli Studi di Milano 1/50 Sommario! La CPU! Sintesi di
Architettura degli Elaboratori e delle Reti Progetto CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Informatica Università degli Studi di Milano 1/50 Sommario! La CPU! Sintesi di
Richiami sull architettura del processore MIPS a 32 bit
 Caratteristiche principali dell architettura del processore MIPS Richiami sull architettura del processore MIPS a 32 bit Architetture Avanzate dei Calcolatori Valeria Cardellini E un architettura RISC
Caratteristiche principali dell architettura del processore MIPS Richiami sull architettura del processore MIPS a 32 bit Architetture Avanzate dei Calcolatori Valeria Cardellini E un architettura RISC
Rappresentazione dell informazione
 Rappresentazione dell informazione Codifica dei numeri Rappresentazioni in base 2, 8, 10 e 16 Rappresentazioni M+S, C1 e C2 Algoritmi di conversione di base Algoritmi di somma, moltiplicazione e divisione
Rappresentazione dell informazione Codifica dei numeri Rappresentazioni in base 2, 8, 10 e 16 Rappresentazioni M+S, C1 e C2 Algoritmi di conversione di base Algoritmi di somma, moltiplicazione e divisione
CPU a ciclo multiplo
 Architettura degli Elaboratori e delle Reti Lezione CPU a ciclo multiplo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L /9 Sommario! I problemi
Architettura degli Elaboratori e delle Reti Lezione CPU a ciclo multiplo Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano L /9 Sommario! I problemi
Architettura dell elaboratore
 Architettura dell elaboratore Riprendiamo il discorso lasciato in sospeso ad inizio corso Riepilogando I programmi e i dati risiedono nella memoria secondaria Per essere eseguiti (i programmi) e usati
Architettura dell elaboratore Riprendiamo il discorso lasciato in sospeso ad inizio corso Riepilogando I programmi e i dati risiedono nella memoria secondaria Per essere eseguiti (i programmi) e usati
Architettura dell elaboratore
 Architettura dell elaboratore Riprendiamo il discorso lasciato in sospeso ad inizio corso Riepilogando I programmi e i dati risiedono nella memoria secondaria Per essere eseguiti (i programmi) e usati
Architettura dell elaboratore Riprendiamo il discorso lasciato in sospeso ad inizio corso Riepilogando I programmi e i dati risiedono nella memoria secondaria Per essere eseguiti (i programmi) e usati
Università degli Studi di Cassino
 Corso di Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 2007/2008 Francesco Tortorella Istruzioni di confronto Istruzione Significato slt $t1,$t2,$t3 if
Corso di Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 2007/2008 Francesco Tortorella Istruzioni di confronto Istruzione Significato slt $t1,$t2,$t3 if
CALCOLATORI ELETTRONICI 27 giugno 2017
 CALCOLATORI ELETTRONICI 27 giugno 2017 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1 Di seguito è riportato lo schema di una ALU a 32 bit in grado
CALCOLATORI ELETTRONICI 27 giugno 2017 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1 Di seguito è riportato lo schema di una ALU a 32 bit in grado
Architettura degli elaboratori Tema d esame del 20/01/2016
 Architettura degli elaboratori - Luigi Lavazza A.A. 25/6 Università degli Studi dell Insubria Dipartimento di Informatica e Comunicazione Architettura degli elaboratori Tema d esame del 2//26 Luigi Lavazza
Architettura degli elaboratori - Luigi Lavazza A.A. 25/6 Università degli Studi dell Insubria Dipartimento di Informatica e Comunicazione Architettura degli elaboratori Tema d esame del 2//26 Luigi Lavazza
ARCHITETTURA DI UN ELABORATORE! Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40).!
.!") ARCHITETTURA DI UN ELABORATORE! Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40).! MACCHINA DI VON NEUMANN! UNITÀ FUNZIONALI fondamentali! Processore
ARCHITETTURA DI UN ELABORATORE! Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40).! MACCHINA DI VON NEUMANN! UNITÀ FUNZIONALI fondamentali! Processore
CALCOLATORI ELETTRONICI 29 giugno 2015
 CALCOLATORI ELETTRONICI 29 giugno 2015 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1. Relativamente al confronto tra le implementazioni del processore
CALCOLATORI ELETTRONICI 29 giugno 2015 NOME: COGNOME: MATR: Scrivere nome, cognome e matricola chiaramente in caratteri maiuscoli a stampa 1. Relativamente al confronto tra le implementazioni del processore
Una CPU multi-ciclo. Sommario
 Una CPU multi-ciclo Prof. Alberto Borghese Dipartimento di Scienze dell Informazione borghese@dsi.unimi.it Università degli Studi di Milano 1/3 http:\\homes.dsi.unimi.it\ borghese Sommario I problemi della
Una CPU multi-ciclo Prof. Alberto Borghese Dipartimento di Scienze dell Informazione borghese@dsi.unimi.it Università degli Studi di Milano 1/3 http:\\homes.dsi.unimi.it\ borghese Sommario I problemi della
Il linguaggio del calcolatore: linguaggio macchina e linguaggio assembly
 Il linguaggio del calcolatore: linguaggio macchina e linguaggio assembly Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Richiamo sull
Il linguaggio del calcolatore: linguaggio macchina e linguaggio assembly Percorso di Preparazione agli Studi di Ingegneria Università degli Studi di Brescia Docente: Massimiliano Giacomin Richiamo sull
AXO - Architettura dei Calcolatori e Sistema Operativo. organizzazione strutturata dei calcolatori
 AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
slt $t1,$t2,$t3 if ($t2<$t3) $t1=1; Confronto tra registri slti $t1,$t2,100 if ($t2<100)$t1=1; Cfr. registro-costante
 $t1=1; Confronto tra registri slti $t1,$t2,100 if ($t2<100)$t1=1; Cfr. registro-costante") Istruzioni di confronto Istruzione Significato slt $t1,$t2,$t3 if ($t2
Istruzioni di confronto Istruzione Significato slt $t1,$t2,$t3 if ($t2
CALCOLATORI ELETTRONICI 9 settembre 2011
 CALCOLATORI ELETTRONICI 9 settembre 2011 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche AND, OR e NOT la funzione combinatoria (a
CALCOLATORI ELETTRONICI 9 settembre 2011 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche AND, OR e NOT la funzione combinatoria (a
Istruzioni e linguaggio macchina
 Istruzioni e linguaggio macchina I linguaggi macchina sono composti da istruzioni macchina, codificate in binario, con formato ben definito processori diversi hanno linguaggi macchina simili scopo: massimizzare
Istruzioni e linguaggio macchina I linguaggi macchina sono composti da istruzioni macchina, codificate in binario, con formato ben definito processori diversi hanno linguaggi macchina simili scopo: massimizzare
Calcolatori Elettronici
 Calcolatori Elettronici CPU multiciclo: esercizi Massimiliano Giacomin 1 Prima tipologia di esercizi: valutazione delle prestazioni 2 Specchio riassuntivo su prestazioni e CPI 0) In generale: T esecuzione
Calcolatori Elettronici CPU multiciclo: esercizi Massimiliano Giacomin 1 Prima tipologia di esercizi: valutazione delle prestazioni 2 Specchio riassuntivo su prestazioni e CPI 0) In generale: T esecuzione
Richiami sull architettura del processore MIPS a 32 bit
 Richiami sull architettura del processore MIPS a 32 bit Architetture Avanzate dei Calcolatori Valeria Cardellini Caratteristiche principali dell architettura del processore MIPS E un architettura RISC
Richiami sull architettura del processore MIPS a 32 bit Architetture Avanzate dei Calcolatori Valeria Cardellini Caratteristiche principali dell architettura del processore MIPS E un architettura RISC
Corso di Calcolatori Elettronici MIPS: Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M.
 di Cassino e del Lazio Meridionale Corso di MIPS: Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 201/201 Francesco Tortorella Istruzioni di confronto Istruzione
di Cassino e del Lazio Meridionale Corso di MIPS: Istruzioni di confronto Istruzioni di controllo Formato delle istruzioni in L.M. Anno Accademico 201/201 Francesco Tortorella Istruzioni di confronto Istruzione
Esercitazione Unità di controllo microprogrammate Architettura di Wilkes. Sommario Unità di controllo microprogrammate Nanoprogrammazione
 Esercitazione 12 Sommario Unità di controllo microprogrammate Nanoprogrammazione 1. Unità di controllo microprogrammate L'insieme di segnali di controllo prodotti dall'unità di Controllo ad un certo istante
Esercitazione 12 Sommario Unità di controllo microprogrammate Nanoprogrammazione 1. Unità di controllo microprogrammate L'insieme di segnali di controllo prodotti dall'unità di Controllo ad un certo istante
CALCOLATORI ELETTRONICI 25 giugno 2018
 CALCOLATORI ELETTRONICI 25 giugno 2018 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche OR, AND, NOT la funzione combinatoria (a 3 ingressi
CALCOLATORI ELETTRONICI 25 giugno 2018 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche OR, AND, NOT la funzione combinatoria (a 3 ingressi
Linguaggio Assembly e linguaggio macchina
 Architettura degli Elaboratori e delle Reti Lezione 11 Linguaggio Assembly e linguaggio macchina Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli Elaboratori e delle Reti Lezione 11 Linguaggio Assembly e linguaggio macchina Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Lezione 20. della CPU MIPS. Prof. Federico Pedersini Dipartimento di Informatica Università degli Studi di Milano
 Architettura degli Elaboratori Lezione 20 ISA (Instruction Set Architecture) della CPU MIPS Prof. Federico Pedersini Dipartimento di Informatica Università degli Studi di Milano L16-20 1/29 Linguaggio
Architettura degli Elaboratori Lezione 20 ISA (Instruction Set Architecture) della CPU MIPS Prof. Federico Pedersini Dipartimento di Informatica Università degli Studi di Milano L16-20 1/29 Linguaggio
Esercitazione del 04/05/2006 Soluzioni
 Esercitazione del 04/05/2006 Soluzioni 1. CPU singolo ciclo vs CPU multi ciclo. Una CPU a ciclo singolo richiede un ciclo di clock di durata sufficiente a permettere la stabilizzazione del circuito nel
Esercitazione del 04/05/2006 Soluzioni 1. CPU singolo ciclo vs CPU multi ciclo. Una CPU a ciclo singolo richiede un ciclo di clock di durata sufficiente a permettere la stabilizzazione del circuito nel
Linguaggio Assembly e linguaggio macchina
 Architettura degli Elaboratori e delle Reti Lezione 11 Linguaggio Assembly e linguaggio macchina Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli Elaboratori e delle Reti Lezione 11 Linguaggio Assembly e linguaggio macchina Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
L unità di elaborazione PC: MAR/MDR IR: R0 Rn: TEMP, V, Z
 Struttura del processore L unità di elaborazione Corso ACSO prof. Cristina SILVANO Politecnico di Milano Datapath ad un solo bus interno Faremo riferimento ad una generica CPU e a una memoria con parole
Struttura del processore L unità di elaborazione Corso ACSO prof. Cristina SILVANO Politecnico di Milano Datapath ad un solo bus interno Faremo riferimento ad una generica CPU e a una memoria con parole
Lezione 20. della CPU MIPS. Prof. Federico Pedersini Dipartimento di Informatica Università degli Studi di Milano
 Architettura degli Elaboratori Lezione 20 ISA (Instruction Set Architecture) della CPU MIPS Prof. Federico Pedersini Dipartimento di Informatica Università degli Studi di Milano L16-20 1/29 Linguaggio
Architettura degli Elaboratori Lezione 20 ISA (Instruction Set Architecture) della CPU MIPS Prof. Federico Pedersini Dipartimento di Informatica Università degli Studi di Milano L16-20 1/29 Linguaggio
Architettura degli elaboratori Tema d esame del 20/01/2016
 Architettura degli elaboratori - Luigi Lavazza A.A. 5/6 Università degli Studi dell Insubria Dipartimento di Informatica e Comunicazione Architettura degli elaboratori Tema d esame del //6 Luigi Lavazza
Architettura degli elaboratori - Luigi Lavazza A.A. 5/6 Università degli Studi dell Insubria Dipartimento di Informatica e Comunicazione Architettura degli elaboratori Tema d esame del //6 Luigi Lavazza
Architettura degli Elaboratori
 Architettura degli Elaboratori Linguaggio macchina e assembler (caso di studio: processore MIPS) slide a cura di Salvatore Orlando, Marta Simeoni, Andrea Torsello Architettura degli Elaboratori 1 1 Istruzioni
Architettura degli Elaboratori Linguaggio macchina e assembler (caso di studio: processore MIPS) slide a cura di Salvatore Orlando, Marta Simeoni, Andrea Torsello Architettura degli Elaboratori 1 1 Istruzioni
Linguaggio macchina e register file
 Linguaggio macchina e register file Prof. Alberto Borghese Dipartimento di Scienze dell Informazione borghese@di.unimi.it Università degli Studi di Milano Riferimento sul Patterson: capitolo 4.2, 4.4,
Linguaggio macchina e register file Prof. Alberto Borghese Dipartimento di Scienze dell Informazione borghese@di.unimi.it Università degli Studi di Milano Riferimento sul Patterson: capitolo 4.2, 4.4,
Argomenti. Processori microprogrammati. Architetture CISC Architetture RISC. » Pipeline» Architetture superscalari
 Argomenti Processori microprogrammati» Microistruzioni e microprogrammi» Esempio di architettura microprogrammata Architetture CISC Architetture RISC» Pipeline» Architetture superscalari Processori microprogrammati
Argomenti Processori microprogrammati» Microistruzioni e microprogrammi» Esempio di architettura microprogrammata Architetture CISC Architetture RISC» Pipeline» Architetture superscalari Processori microprogrammati
Architettura del Calcolatore
 Giuseppe Manco Lezione 3 17 Ottobre 2003 Architettura del calcolatore Il calcolatore è uno strumento programmabile per la rappresentazione, la memorizzazione e l elaborazione delle informazioni un calcolatore
Giuseppe Manco Lezione 3 17 Ottobre 2003 Architettura del calcolatore Il calcolatore è uno strumento programmabile per la rappresentazione, la memorizzazione e l elaborazione delle informazioni un calcolatore
Calcolatori Elettronici A a.a. 2008/2009
 Calcolatori Elettronici A a.a. 2008/2009 Instruction Set Architecture: nozioni generali Massimiliano Giacomin 1 DOVE CI TROVIAMO Livello del linguaggio specializzato Traduzione (compilatore) o interpretazione
Calcolatori Elettronici A a.a. 2008/2009 Instruction Set Architecture: nozioni generali Massimiliano Giacomin 1 DOVE CI TROVIAMO Livello del linguaggio specializzato Traduzione (compilatore) o interpretazione
Linguaggio Assembly e linguaggio macchina
 Architettura degli Elaboratori e delle Reti Lezione 11 Linguaggio Assembly e linguaggio macchina Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli Elaboratori e delle Reti Lezione 11 Linguaggio Assembly e linguaggio macchina Proff. A. Borghese, F. Pedersini Dipartimento di Scienze dell Informazione Università degli Studi di Milano
Architettura degli elaboratori CPU a ciclo singolo
 Architettura degli elaboratori CPU a ciclo singolo Prof. Alberto Borghese Dipartimento di Informatica borghese@di.unimi.it Università degli Studi di Milano iferimento sul Patterson: capitolo 4.2, 4.4,
Architettura degli elaboratori CPU a ciclo singolo Prof. Alberto Borghese Dipartimento di Informatica borghese@di.unimi.it Università degli Studi di Milano iferimento sul Patterson: capitolo 4.2, 4.4,
Il Ciclo Fetch-Decode-Execute. C Nyssen/Aberdeen College 2003
 Il Ciclo Fetch-Decode-Execute C Nyssen/Aberdeen College 2003 Linguaggio Assembler Op code (Mnemonico) Operando #assembly code program 0000 LDA-24 #loads 0001 ADD-25 #adds 0002 HLT #stops #end of program
Il Ciclo Fetch-Decode-Execute C Nyssen/Aberdeen College 2003 Linguaggio Assembler Op code (Mnemonico) Operando #assembly code program 0000 LDA-24 #loads 0001 ADD-25 #adds 0002 HLT #stops #end of program
Progetto CPU a singolo ciclo
 Architettura degli Elaboratori e delle Reti Progetto CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Informatica Università degli Studi di Milano 1/60 Sommario v La CPU v Sintesi di
Architettura degli Elaboratori e delle Reti Progetto CPU a singolo ciclo Proff. A. Borghese, F. Pedersini Dipartimento di Informatica Università degli Studi di Milano 1/60 Sommario v La CPU v Sintesi di
Architettura dei calcolatori e sistemi operativi. Architettura MIPS e set istruzioni Capitolo 2 P&H
 Architettura dei calcolatori e sistemi operativi Architettura MIPS e set istruzioni Capitolo 2 P&H Instruction Set Architecture ISA Linguaggio assemblatore e linguaggio macchina ISA processore MIPS Modello
Architettura dei calcolatori e sistemi operativi Architettura MIPS e set istruzioni Capitolo 2 P&H Instruction Set Architecture ISA Linguaggio assemblatore e linguaggio macchina ISA processore MIPS Modello
Architettura del calcolatore (Seconda parte)
") Architettura del calcolatore (Seconda parte) Ingegneria Meccanica e dei Materiali Università degli Studi di Brescia Prof. Massimiliano Giacomin LINGUAGGIO E ORGANIZZAZIONE DEL CALCOLATORE Linguaggio assembly
Architettura del calcolatore (Seconda parte) Ingegneria Meccanica e dei Materiali Università degli Studi di Brescia Prof. Massimiliano Giacomin LINGUAGGIO E ORGANIZZAZIONE DEL CALCOLATORE Linguaggio assembly
Architettura di un calcolatore: introduzione. Calcolatore: sottosistemi
 Corso di Calcolatori Elettronici I A.A. 2012-2013 Architettura di un calcolatore: introduzione Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e
Corso di Calcolatori Elettronici I A.A. 2012-2013 Architettura di un calcolatore: introduzione Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e
Calcolatori Elettronici
 Calcolatori Elettronici CPU a singolo ciclo assimiliano Giacomin Schema del processore (e memoria) Unità di controllo PC emoria indirizzo IR Condizioni SEGNALI DI CONTROLLO dato letto UNITA DI ELABORAZIONE
Calcolatori Elettronici CPU a singolo ciclo assimiliano Giacomin Schema del processore (e memoria) Unità di controllo PC emoria indirizzo IR Condizioni SEGNALI DI CONTROLLO dato letto UNITA DI ELABORAZIONE
Calcolatori Elettronici
 Calcolatori Elettronici LIVELLO ORGANIZZAZIONE: SCHEMI DI BASE ALU e REGISTER FILE Massimiliano Giacomin 1 DOVE CI TROVIAMO LIVELLO SIST. OP. Application Binary Interface (ABI) ISA Instruction Set Architecture
Calcolatori Elettronici LIVELLO ORGANIZZAZIONE: SCHEMI DI BASE ALU e REGISTER FILE Massimiliano Giacomin 1 DOVE CI TROVIAMO LIVELLO SIST. OP. Application Binary Interface (ABI) ISA Instruction Set Architecture
Architettura di un calcolatore: introduzione. Calcolatore: sottosistemi
 Corso di Calcolatori Elettronici I A.A. 2010-2011 Architettura di un calcolatore: introduzione Lezione 18 Prof. Roberto Canonico Università degli Studi di Napoli Federico II Facoltà di Ingegneria Corso
Corso di Calcolatori Elettronici I A.A. 2010-2011 Architettura di un calcolatore: introduzione Lezione 18 Prof. Roberto Canonico Università degli Studi di Napoli Federico II Facoltà di Ingegneria Corso
ARCHITETTURA DI UN ELABORATORE. Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40).
.") ARCHITETTURA DI UN ELABORATORE Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40). MACCHINA DI VON NEUMANN UNITÀ FUNZIONALI fondamentali Processore (CPU)
ARCHITETTURA DI UN ELABORATORE Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40). MACCHINA DI VON NEUMANN UNITÀ FUNZIONALI fondamentali Processore (CPU)
AXO Architettura dei Calcolatori e Sistemi Operativi. microarchitettura del processore
 AXO Architettura dei Calcolatori e Sistemi Operativi microarchitettura del processore Data-path ad un solo bus interno Faremo riferimento ad una generica CPU e a una memoria con parole da 32 bit I registri:
AXO Architettura dei Calcolatori e Sistemi Operativi microarchitettura del processore Data-path ad un solo bus interno Faremo riferimento ad una generica CPU e a una memoria con parole da 32 bit I registri:
Data-path. ad un solo bus interno. Struttura del processore. L unità di elaborazione
 Struttura del processore L unità di elaborazione Data-path ad un solo bus interno Faremo riferimento ad una generica CPU e a una memoria con parole da 32 bit I registri: PC; MAR/MDR (di appoggio per accesso
Struttura del processore L unità di elaborazione Data-path ad un solo bus interno Faremo riferimento ad una generica CPU e a una memoria con parole da 32 bit I registri: PC; MAR/MDR (di appoggio per accesso
CALCOLATORI ELETTRONICI 15 luglio 2014
 CALCOLATORI ELETTRONICI 15 luglio 2014 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si disegni lo schema di un flip-flop master-slave sensibile ai fronti di salita e se
CALCOLATORI ELETTRONICI 15 luglio 2014 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si disegni lo schema di un flip-flop master-slave sensibile ai fronti di salita e se
Esercitazione 11. Control-Unit. Data-Path
 Esercitazione 11 Sommario Unità di controllo cablate 1. Unità di controllo L architettura interna di una CPU può essere modellata attraverso una struttura costituita da 2 unità interagenti: percorso dati
Esercitazione 11 Sommario Unità di controllo cablate 1. Unità di controllo L architettura interna di una CPU può essere modellata attraverso una struttura costituita da 2 unità interagenti: percorso dati
L unità di controllo. Il processore: unità di controllo. Le macchine a stati finiti. Struttura della macchina a stati finiti
 Il processore: unità di lo Architetture dei Calcolatori (lettere A-I) L unità di lo L unità di lo è responsabile della generazione dei segnali di lo che vengono inviati all unità di elaborazione Alcune
Il processore: unità di lo Architetture dei Calcolatori (lettere A-I) L unità di lo L unità di lo è responsabile della generazione dei segnali di lo che vengono inviati all unità di elaborazione Alcune
Memorie Corso di Calcolatori Elettronici A 2007/2008 Sito Web:http://prometeo.ing.unibs.it/quarella Prof. G. Quarella
 Memorie Corso di Calcolatori Elettronici A 2007/2008 Sito Web:http://prometeo.ing.unibs.it/quarella Prof. G. Quarella prof@quarella.net Tipi di memorie Possono essere classificate in base a varie caratteristiche:
Memorie Corso di Calcolatori Elettronici A 2007/2008 Sito Web:http://prometeo.ing.unibs.it/quarella Prof. G. Quarella prof@quarella.net Tipi di memorie Possono essere classificate in base a varie caratteristiche:
Macchina di von Neumann
 Il processore PD32 Macchina di von Neumann Unità di Ingresso Memoria di lavoro Unità di Uscita Unità di Calcolo Unità di Controllo Suddivisione SCA-SCO Unità di Ingresso Memoria di lavoro Unità di Uscita
Il processore PD32 Macchina di von Neumann Unità di Ingresso Memoria di lavoro Unità di Uscita Unità di Calcolo Unità di Controllo Suddivisione SCA-SCO Unità di Ingresso Memoria di lavoro Unità di Uscita
Macchine Astratte. Luca Abeni. February 22, 2017
 Macchine Astratte February 22, 2017 Architettura dei Calcolatori - 1 Un computer è composto almeno da: Un processore (CPU) Esegue le istruzioni macchina Per fare questo, può muovere dati da/verso la memoria
Macchine Astratte February 22, 2017 Architettura dei Calcolatori - 1 Un computer è composto almeno da: Un processore (CPU) Esegue le istruzioni macchina Per fare questo, può muovere dati da/verso la memoria
CALCOLATORI ELETTRONICI 27 marzo 2018
 CALCOLATORI ELETTRONICI 27 marzo 2018 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche di AND, OR e NOT la funzione combinatoria (a
CALCOLATORI ELETTRONICI 27 marzo 2018 NOME: COGNOME: MATR: Scrivere chiaramente in caratteri maiuscoli a stampa 1. Si implementi per mezzo di porte logiche di AND, OR e NOT la funzione combinatoria (a
FONDAMENTI DI INFORMATICA Lezione n. 10
 FONDAMENTI DI INFORMATICA Lezione n. 10 CPU-MEMORIA CICLO PRINCIPALE CPU ARCHITETTURA BASE UNITÀ DI ESECUZIONE E UNITÀ DI CONTROLLO In questa lezione viene analizzata l'architettura di base di un sistema
FONDAMENTI DI INFORMATICA Lezione n. 10 CPU-MEMORIA CICLO PRINCIPALE CPU ARCHITETTURA BASE UNITÀ DI ESECUZIONE E UNITÀ DI CONTROLLO In questa lezione viene analizzata l'architettura di base di un sistema
FONDAMENTI DI INFORMATICA Lezione n. 10
 FONDAMENTI DI INFORMATICA Lezione n. 10 CPU-MEMORIA CICLO PRINCIPALE CPU ARCHITETTURA BASE UNITÀ DI ESECUZIONE E UNITÀ DI CONTROLLO In questa lezione viene analizzata l'architettura di base di un sistema
FONDAMENTI DI INFORMATICA Lezione n. 10 CPU-MEMORIA CICLO PRINCIPALE CPU ARCHITETTURA BASE UNITÀ DI ESECUZIONE E UNITÀ DI CONTROLLO In questa lezione viene analizzata l'architettura di base di un sistema
Architettura degli Elaboratori
 Architettura degli Elaboratori Ciclo di, classificazione e livelli delle architetture di calcolatore Lezioni del Corso di Laurea Triennale in Informatica Per gentilezza del Prof. Sebastiano Pizzutilo (Dipartimento
Architettura degli Elaboratori Ciclo di, classificazione e livelli delle architetture di calcolatore Lezioni del Corso di Laurea Triennale in Informatica Per gentilezza del Prof. Sebastiano Pizzutilo (Dipartimento
Calcolatore: sottosistemi
 Calcolatore: sottosistemi Processore o CPU (Central Processing Unit) Memoria centrale Sottosistema di input/output (I/O) CPU I/O Memoria Calcolatore: organizzazione a bus Il processore o CPU Unità di controllo
Calcolatore: sottosistemi Processore o CPU (Central Processing Unit) Memoria centrale Sottosistema di input/output (I/O) CPU I/O Memoria Calcolatore: organizzazione a bus Il processore o CPU Unità di controllo
ISA DLX: Implementazione Tramite Struttura Sequenziale
 Calcolatori Elettronici L-A ISA DLX: Implementazione Tramite Struttura Sequenziale DLX "sequenziale" 1 Richiamo: caratterirtiche della CPU DLX DLX è un nome di fantasia (sta per De LuXe). Questa CPU è
Calcolatori Elettronici L-A ISA DLX: Implementazione Tramite Struttura Sequenziale DLX "sequenziale" 1 Richiamo: caratterirtiche della CPU DLX DLX è un nome di fantasia (sta per De LuXe). Questa CPU è
Implementazione di circuiti
 Implementazione di circuiti PLA: Programmable Logic Array matrici regolari AND e OR in successione personalizzabili dall utente ROM: Read Only Memory circuiti ad hoc che implementano una particolare funzione
Implementazione di circuiti PLA: Programmable Logic Array matrici regolari AND e OR in successione personalizzabili dall utente ROM: Read Only Memory circuiti ad hoc che implementano una particolare funzione
Pag. 1. Informatica Facoltà di Medicina Veterinaria a.a. 2012/13 prof. Stefano Cagnoni. Architettura del calcolatore (parte II)
") 1 Università degli studi di Parma Dipartimento di Ingegneria dell Informazione Informatica a.a. 2012/13 La inserita nella architettura dell elaboratore Informatica Facoltà di Medicina Veterinaria a.a.
1 Università degli studi di Parma Dipartimento di Ingegneria dell Informazione Informatica a.a. 2012/13 La inserita nella architettura dell elaboratore Informatica Facoltà di Medicina Veterinaria a.a.
Implementazione semplificata
 Il processore 168 Implementazione semplificata Copre un sottoinsieme limitato di istruzioni rappresentative dell'isa MIPS aritmetiche/logiche: add, sub, and, or, slt accesso alla memoria: lw, sw trasferimento
Il processore 168 Implementazione semplificata Copre un sottoinsieme limitato di istruzioni rappresentative dell'isa MIPS aritmetiche/logiche: add, sub, and, or, slt accesso alla memoria: lw, sw trasferimento
Introduzione alla Microprogrammazione
 Introduzione alla Microprogrammazione Corso Calcolatori Elettronici 2 Prof. Antonino Mazzeo Ing. Casola Valentina Organizzazione a bus singolo dell architettura interna della CPU del 68000 Porte di ingresso
Introduzione alla Microprogrammazione Corso Calcolatori Elettronici 2 Prof. Antonino Mazzeo Ing. Casola Valentina Organizzazione a bus singolo dell architettura interna della CPU del 68000 Porte di ingresso
Le memorie Cache n-associative
 Le memorie Cache n-associative Prof. Alberto Borghese Dipartimento di Scienze dell Informazione alberto.borghese@unimi.it Università degli Studi di Milano Riferimento Patterson: 5.2, 5.3 1/30 Sommario
Le memorie Cache n-associative Prof. Alberto Borghese Dipartimento di Scienze dell Informazione alberto.borghese@unimi.it Università degli Studi di Milano Riferimento Patterson: 5.2, 5.3 1/30 Sommario
Calcolatori Elettronici
 Calcolatori Elettronici RETI LOGICHE: RETI COMBINATORIE Massimiliano Giacomin 1 INTRODUZIONE: LIVELLI HARDWARE, LIVELLO LOGICO PORTE LOGICHE RETI LOGICHE 2 LIVELLI HARDWARE Livello funzionale Livello logico
Calcolatori Elettronici RETI LOGICHE: RETI COMBINATORIE Massimiliano Giacomin 1 INTRODUZIONE: LIVELLI HARDWARE, LIVELLO LOGICO PORTE LOGICHE RETI LOGICHE 2 LIVELLI HARDWARE Livello funzionale Livello logico
Struttura del processore. L unità di controllo
 Struttura del processore L unità di controllo Esecuzione di istruzioni macchina Per eseguire le istruzioni macchina il processore deve generare sequenze appropriate di segnali di controllo Vi sono due
Struttura del processore L unità di controllo Esecuzione di istruzioni macchina Per eseguire le istruzioni macchina il processore deve generare sequenze appropriate di segnali di controllo Vi sono due
Calcolatori Elettronici
 Calcolatori Elettronici RETI LOGICHE: RETI SEQUENZIALI Massimiliano Giacomin 1 LIMITI DELLE RETI COMBINATORIE Nelle reti combinatorie le uscite dipendono solo dall ingresso Þ impossibile far dipendere
Calcolatori Elettronici RETI LOGICHE: RETI SEQUENZIALI Massimiliano Giacomin 1 LIMITI DELLE RETI COMBINATORIE Nelle reti combinatorie le uscite dipendono solo dall ingresso Þ impossibile far dipendere
ARCHITETTURA DI UN ELABORATORE
 ARCHITETTURA DI UN ELABORATORE memoria centrale Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40). John von Neumann (Neumann János) (December 28, 1903
ARCHITETTURA DI UN ELABORATORE memoria centrale Ispirata al modello della Macchina di Von Neumann (Princeton, Institute for Advanced Study, anni 40). John von Neumann (Neumann János) (December 28, 1903