nell Automotive CF3000 Engineering & Electronics
|
|
|
- Eduardo Graziano
- 5 anni fa
- Visualizzazioni
Transcript





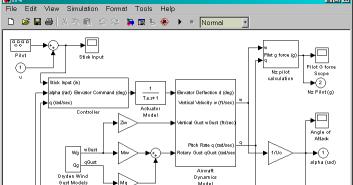
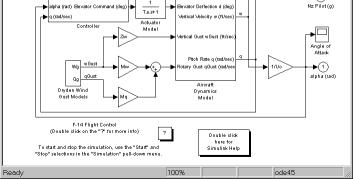
1 L utilizzo dei controlli Real Time nell Automotive Flavio Corradini CF3000 Engineering & Electronics


2 L evoluzione Ingegneria elettronica nel 1988: Sono nati i microcontrollori a basso costo L elettronica digitale sta facendosi spazio sull elettronica analogica Arrivano i primi personal computers Non esiste l hard disk, si usa il DOS su floppy



3 L automotive nel 1988 Il carburatore Weber domina il mondo L accensione a transistor elimina i contatti tti striscianti i ti L iniezione Accensione Weber (IAW) e nata sulla Ferrari GTO La strumentazione e elettromeccanica




4 Prime iniezioni i i i elettroniche Programmazione software in Assembler Studio di nuovi controlli con Centro Ricerche Fiat Vetture di sperimentazione: Lancia Delta Integrale Ford Sierra Cosworth Lancia Delta Integrale, Ford Sierra Cosworth, Ferrari
5 Direttive anti inquinamento DIRETTIVA ARGOMENTO DATA INTRODUZIONE 91/441/CEE Euro 1 Modifica la 70/220/CEE 26/06/ /59/CE Nuovi limiti emissioni 01/10/ /12/CE Nuovi limiti emissioni 19/04/ /44/CE Euro 2 Modifica metodi rilevamento emissioni 01/07/ /69/CE Emissioni veicoli 01/10/1996 benzina, gasolio


6 I controlli Tra i vari softwaristi, si distinguono quelli con metodo empirico i e quelli che riescono ad applicare al motore endotermico le teorie di controllo Mentre gli ingegneri meccanici faticano a capire l elettronica elettronica, gli ingegneri elettronici piu preparati non sfigurano nell affrontare e risolvere elettronicamente problemi meccanici del motore
7 La specializzazione Corso professionale post laurea sui controlli robusti al prestigioso MIT di Boston



8 Al giorno d oggi Tutti i motori hanno controllo elettronico a microprocessore I nuovi requisiti di autodiagnosi in tempo reale spingono a verifiche sempre piu sofisticate
9 Infomobilita Gestione GPS per Sistemi di navigazione Gestione informativa di bordo
10 Ripartizione i microprocessori i / microcontrollori Computer Generici (PC, workstations, mainframes) 95% 5% Sistemi Embedded (cellulari, telecamere, Veicoli, ecc.)
11 Criticita Real Time Automotive Sistemi operativi real time Campionamenti Filtraggi
12 Input dall utente t L interazione può avvenire tramite pulsanti o manopole. UP SET DOWN ESC Utilizzo combinato di manopola con 2 pulsanti (SET e ESC). La manopola consente di muoversi tra le voci disponibili mentre i 2 pulsanti permettono di selezionare o uscire dalla funzione. UP SET ESC Utilizzo di 4 pulsanti, può rallentare la navigazione in liste lunghe. DOWN

.")
13 Input dall utente t Gli eventi sui pulsanti possono essere associati alla pressione o al rilascio dei pulsanti stessi. Nel secondo caso è possibile associare eventi differenti in base alla durata della pressione del pulsante. (Es. pressione breve esegui A, pressione lunga esegui B). In questo caso la pressione del pulsante abilita un timer. PREMUTO RILASCIATO Start Timer Esegui A Esegui B T




14 MECCANICO Input dall utente t TOUCH SCREEN MISTO



15 In particolari occasioni visualizzare su grafico i segnali di interesse risulta meno chiaro rispetto alla visualizzazione i diretta sulla strumentazione t




16 La modifica di parametri del modello può avvenire direttamente attraverso l interfaccia grafica che riproduce la strumentazione.


 è")

17 Esempio di modello virtuale di cruscotto Con particolari tools (es. Altia) è possibile animare rapidamente l intera strumentazione






")
18 Con il partizionamento grafico è possibile testare C-Code funzionalità differenti. Model Based C-Code Model Based C-Code Model Based Ogni porzione di interfaccia è collegata a un Ogni porzione di interfaccia è collegata a un modello (o codice)



19 La comunicazione può avvenire via TCP C-Code Model Based Lan - Internet TCP C-Code Model Based
20 L C i d iù i f Al i La Connection permette ad una o più interfacce Altia di interagire con un modello Simulink



21

22 Nelle Chart di Stateflow è possibile fare chiamate alle API di Altia. Questa funzionalità è utile quando si intende visualizzare sull interfaccia delle stringhe di testo. Modello Completo File.dsn Modello API Macchina a stati



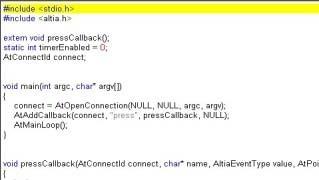
23 Applicazione Altia API Codice utente Logica (logica di controllo dell applicazione)



24 Integrazione con codice esistente Sviluppo interfaccia Sviluppo codice di controllo Codice utente Altia API I/O API
 altia Applicazioneione Modello Modello altia Macchina a stati Macchina a")
25 E possibile integrare codice generato da altri tool di simulazione (es. RTW) altia Applicazioneione Modello Modello altia Macchina a stati Macchina a stati


 { }")
26 Simulazione dell intero modello Applicazione Codice Gestione Display LOGICA Codice Gestione Pulsanti Virtuali int readbutton() { } readvirtualbutton();



 { }")
27 Display Simulato - Cruscotto Reale Prototipo Reale TCP CAN Applicazione Codice Gestione Display LOGICA Codice Gestione Pulsanti Reali int readbutton() { } readrealbutton();



28 Display Simulato - Cruscotto Reale Applicazione


; TARGET")
29 Rapid Prototyping Codice Gestione Display HOST HW Real Time LOGICA Codice Gestione Pulsanti Reali int readbutton() { } readrealbutton(); TARGET RT




30 Generazione di codice con DeepScreen Applicazione i Codice Interfaccia Codice Gestione Display LOGICA Codice Gestione Pulsanti Reali int readbutton() { } readrealbutton();
31 Definire Dati ed Eventi con Simulink/Stateflow t Si devono definire i dati e gli eventi prima di verificare il diagramma Stateflow Usare il menu Add per definire un nuovo oggetto dato o evento Cambiare sempre il nome di default

")


32 Dati ed Eventi con l Explorer Menus for adding, moving, and removing data and events The current selection Simulink is highlighted Model (Machine) Stateflow Block (Chart) State/Substates Data and events defined within the current selection All open Simulink models which h contain Stateflow blocks are listed here.
33 Interfacciare Stateflow/Simulink Data and Events servono come input e output tra Simulink e Stateflow Inputs I Data inputs rappresentano valori numerici, il flusso di segnale di Simulink. Gli Event inputs corrispondono a triggers in Simulink. Le occorrenze degli eventi sono semplicemente I fronti per la simulazione Outputs I Data outputs sono usati come segnali Simulink Gli E t t t t i ti i lt i Gli Event outputs sono triggers usati in altri blocchi Stateflow e sottosistemi triggerati
34 Simulink Inputs Events are grouped together as a vector and the index is specified Data is separated into different inputs and the port is specified
35 Simulink Outputs t Data and event outputs to p Simulink originate as separate signals. You specify the port.
36 Cosa significa Event Driven? La Stateflow chart viene eseguita solo quando il segnale di trigger va a zero At times of zero crossing the Stateflow block executes. t The Stateflow t block executes as a result of another signal.
37 Eventi in Simulink Blocks with outputs that cross zero. Step Functions Pulse Generators set_param( param('x/constant','value','0') 0) HG Callback to a Constant Block Manual switch between zero and one
38 Esempio MASTER e SLAVE Il MASTER (antislittamento) decide di attuare una riduzione di coppia motrice La centralina SLAVE (controllo motore) diminuisce la potenza erogata dal motore
39 Arbitraggio Quando ci sono dei conflitti tra le centraline un arbitro deve prendere una decisione Le priorita di arbitraggio devono essere ben valutate a priori i
40 Progettazione a strati dei sistemi embedded System specification level Level 0: Requirements level Level 1: Architecture level Level 2: Implementation level Inter-level transformation: Is modeled by Is implemented by Level specification languages: Matlab, Actia C Exploration search area Level 3: Realization level Compiles into Machine code, Connected hardware modules
41 Progetto di ECU controllo motore Specifiche della centralina di controllo motore Simulazione funzionale Partitioning i e Mapping Ottimizzazioni
42 Controllo motore Calcolare il tempo di iniezione ottimale Minor consumo carburante Minori emissioni inquinanti Maggiori coppia e potenza Necessario trovare un trade-off tra requisiti in conflitto
43 Controllo motore Air_temp, Water_temp, Accelerator, Battery, Air_pressure Analog Acquisitions Processed analog inputs Crankshaft, Camshaft Frequency Acquisitions RPM Phase Control Strategy Control Drivers Tre fasi Acquisizione, Controllo, Attuazione Injection Others
44 Specifiche della ECU Funzionalita principale di una ECU Tre blocchi gerarchici Analog Acquisitions, Frequency Acquisitions, Control and Drivers. Matlab usato per tutti I moduli Simulink usato per simulazione, partitioning and mapping
45 Specifiche per i sensori Tensione batteria: per determinare il comportamento t di alcuni attuatori t Debimetro, per calcolare il flusso d aria entrante Sensore di posizione acceleratore Sensori di temperature aria e acqua Sensore di posizione con ruota fonica, che misura la rotazione del motore contando I denti che passano di fronte a un sensore induttivo Posizione albero a camme, usato alla ruota fonica dei giri motore per identificare la fase di ogni pistone
46 Esempio specifica di un modulo module Compute_T_Inj: input RESET, VOLT_BATT: integer, Q_Fuel: integer; output TIME_Inj: integer; constant G_INJECT: integer; function sb_ itp_ CKBATT(integer): g integer; ; var k_batt, q_fuel_curr, time_inj, volt_batt: integer in loop k_batt := 0; q_fuel_curr := 0; time_inj := 0; volt_batt := 0; do loop await [VOLT_BATT or Q_FUEL]; present VOLT_BATT then if (?VOLT_BATT<>volt_batt) then volt_batt :=?VOLT_BATT; end if; end present; present Q_Fuel then k_ batt := sb_ itp_ CKBATT(volt _ batt); q_ fuel_ curr :=?Q_ Fuel+(?Q (Q_ Fuel*k_ batt)/256; time_inj := (G_INJECT*q_fuel_curr)/ 32; emit TIME_Inj(time_inj); end present; end loop; watching RESET; end dloop end var end module
47 Simulazione funzionale Modello semplificato del motore, usando blocchi funzionali speciali La temporizzazione non e considerata Uscite e stati verificati usando display grafici e testuali V ifi i i t t t Verifica raggiungimento comportamento corretto in tutte le condizioni operative
48 Partitioning and Mapping Motorola a 16 MHz microprocessore scelto Prima, partitioning grossolano cambiando l implementazone di intere unita Poi, partitioning i fine guardando d I singoli moduli entro una unita Considerata anche la politica di schedulazione per i componenti software
49 Partitioning and Mapping La sintesi del software e la stima del tempo di esecuzione permettono una esplorazione rapida dello spazio di progetto Si possono simulare e stimare parecchie implementazioni differenti Gli obiettivi mancati identificano I comportamenti critici, di solito portando a risultati sbagliati C t t t l t ll CPU Comportamento temporale assegnato alla CPU Timing Processing Unit (TPU)
50 Partitioning and Mapping Partitioning iniziato con un implementazione completamente hardware Gradualmente spostati blocchi verso il software Scoperto ad esempio che il collo di bottiglia sta nel modulo delle acquisizioni i i i in frequenza Determinato che il problema risiede nella latenza elevata nel reagire agli eventi entranti Uno schedulatore con arbitraggio puo risolvere Uno schedulatore con arbitraggio puo risolvere il problema
51 Partitioning and mapping Analog Acquisitions A i iti Missed No missed deadlines! Frequency Acquisitions TPU CPU Control & Drivers HW Fast Round Preemptive Very fast Robin scheduler Expensive scheduler PWM and PWM Freq. Timer Acq. and on Timer Mixed the TPU on the HW/SW TPU
52 Partitioning and Mapping Analog Acq Freq Acq Control TPU Scheduler Miss Driver HW HW HW - - NO SW HW HW - RoundRobin NO SW HW SW Driver RoundRobin NO SW SW SW Driver Freq.Acq. SW SW/HW SW Driver Freq.Acq. q SW SW SW Driver (high priority) Freq.Acq. RoundRobin RoundRobin Interrupt YES YES NO
53 Scheduling chart
54 Ottimizzazioni La granularita del progetto ha un grosso impatto sulle prestazioni e sui costi I moduli vengono svolti in catena per redurre la sovrapposizione di scheduling e comunicazione Viene effettuato t il merge dei moduli per ridurre la dimensione del codice I risultati sono comparabili a quelli di altre implementazioni sia come costi che come prestazioni, i ma con minore tempo
55 Simulatori RTHIL Realtime Hardware In The Loop
56 Tipi di input/output Campionamento dei valori Filtraggi hardware e software dei segnali
57 Discretizzazione segnali Il microcontrollore e una macchina che funziona a step I segnali che dobbiamo trattare sono continui E i i di di ti li d E necessario quindi discretizzarli, creandone una rappresentazione sufficientemente veritiera
58 Campionamento Il microcontrollore raccoglie quindi in certi istanti dei campioni del segnale da misurare La sequenza dei campioni viene memorizzata per l opportuna ricostruzione del segnale desiderato
59 Frequenza e fasatura di campionamento La frequenza di campionamento e determinante per il segnale Anche la fasatura del campionamento pero e molto importante per acquisire un valore significativo
60 Fasatura La fasatura del campionamento puo essere fatta su base tempo o su base evento Un esempio della fasatura su base evento e la fasatura su base angolare rispetto all albero motore
61 Sperimentazione La fasatura corretta dipende dal fenomeno che dobbiamo gestire Spesso sono necessarie parecchie prove sperimentali per determinare la fasatura migliore
62 Filtraggio dei segnali Un segnale e sempre associato a disturbi estranei al suo significato primario Per eliminare i disturbi e assolutamente necessario un filtraggio
63 Filtraggio sofware Operazioni simili a quelle effettuate con l hardware possono essere effettuate con il software, ma con una metodologia completamente diversa Il sofware puo effettuare operazioni di filtraggio molto piu complesse, associando ad esempio l eliminazione dei disturbi alla linearizzazione delle curve dei sensori, ecc.
64 Matematica Con i filtraggi software si possono ottenere anche operazioni complesse, come filtri del secondo o terzo ordine Si puo anche inserire una diagnosi dipendente da una macchina a stati di validazione del disturbo



65 Contatto Tel Fax CF3000 Engineering&Electronics Via Tonino Gualtieri, Reggio Emilia Italy
Automotive: CF3000 Engineering & Electronics
 Automotive: evoluzione costante Flavio Corradini CF3000 Engineering & Electronics La nascita Ingegneria elettronica nel 1982: Programmazione con schede perforate Output cartacei con stampe (non erano disponibili
Automotive: evoluzione costante Flavio Corradini CF3000 Engineering & Electronics La nascita Ingegneria elettronica nel 1982: Programmazione con schede perforate Output cartacei con stampe (non erano disponibili
STUDIO ED OTTIMIZZAZIONE DI UN SISTEMA DI CONTROLLO DA BANCO PROVA PER DIESEL COMMON RAIL
 STUDIO ED OTTIMIZZAZIONE DI UN SISTEMA DI CONTROLLO DA BANCO PROVA PER DIESEL COMMON RAIL Tesi di Laurea di: Francesco Faberi RELATORE: Prof. Ing. Luca Piancastelli CORELATORI: Dott.Ing.Bonifacio Grisolia
STUDIO ED OTTIMIZZAZIONE DI UN SISTEMA DI CONTROLLO DA BANCO PROVA PER DIESEL COMMON RAIL Tesi di Laurea di: Francesco Faberi RELATORE: Prof. Ing. Luca Piancastelli CORELATORI: Dott.Ing.Bonifacio Grisolia
centraline elettroniche in ambito automotive CF3000 Engineering & Electronics
 Integrazione real time delle centraline elettroniche in ambito automotive ti Flavio Corradini CF3000 Engineering & Electronics 1 Sistemi elettronici i Veicoli Imbarcazioni Elettronica High-Tech 2 La nascita
Integrazione real time delle centraline elettroniche in ambito automotive ti Flavio Corradini CF3000 Engineering & Electronics 1 Sistemi elettronici i Veicoli Imbarcazioni Elettronica High-Tech 2 La nascita
Orchestra Control. Caso di Studio Scambiatore Pezzi SPI
 POLITECNICO DI MILANO V Facoltà di Ingegneria Orchestra Control Caso di Studio Scambiatore Pezzi SPI Sistemi ad Eventi Discreti A.A. 2010-2011 Sommario Orchestra Control Scambiatore pezzi Controllo Modulare
POLITECNICO DI MILANO V Facoltà di Ingegneria Orchestra Control Caso di Studio Scambiatore Pezzi SPI Sistemi ad Eventi Discreti A.A. 2010-2011 Sommario Orchestra Control Scambiatore pezzi Controllo Modulare
Simulazione di sistemi non lineari Introduzione a Stateflow
 Simulazione di sistemi non lineari Introduzione a Stateflow Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA)
Simulazione di sistemi non lineari Introduzione a Stateflow Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA)
Introduzione a HW/SW codesign
 Introduzione a HW/SW codesign 1 Origini: sintesi dell HW La sintesi logica risulta essere relativamente assestata a partire dagli anni 90 Flusso di progetto: algoritmo => FSM => RTL=> equazioni booleane
Introduzione a HW/SW codesign 1 Origini: sintesi dell HW La sintesi logica risulta essere relativamente assestata a partire dagli anni 90 Flusso di progetto: algoritmo => FSM => RTL=> equazioni booleane
Esempi di possibili domande d esame.
 INFORMATICA INDUSTRIALE N.O. Esempi di possibili domande d esame. N.B. ogni prova scritta prevede indicativamente 3 o 4 domande. Indicare brevemente le operazioni svolte dal LIVELLO DI ACQUISIZIONE durante
INFORMATICA INDUSTRIALE N.O. Esempi di possibili domande d esame. N.B. ogni prova scritta prevede indicativamente 3 o 4 domande. Indicare brevemente le operazioni svolte dal LIVELLO DI ACQUISIZIONE durante
PECUP ELETTRONICA ED ELETTROTECNICA ELETTROTECNICA SISTEMI AUTOMATICI TERZO COMPETENZE ABILITA' CONOSCENZE
 ISTITUTO TECNICO INDUSTRIALE STATALE Enrico Fermi Via Capitano di Castri - 72021 FRANCAVILLA FONTANA (BR) Specializzazioni: ELETTRONICA E TELECOM. - ELETTROTECNICA E AUTOM. INFORMATICA - MECCANICA Tel.
ISTITUTO TECNICO INDUSTRIALE STATALE Enrico Fermi Via Capitano di Castri - 72021 FRANCAVILLA FONTANA (BR) Specializzazioni: ELETTRONICA E TELECOM. - ELETTROTECNICA E AUTOM. INFORMATICA - MECCANICA Tel.
Model-Based-Design in F1
 Model-Based-Design in F1 Team-development e generazione codice in ambienti con un breve time-to-market Riccardo Lodini Indice Ferrari GES Scuderia La storia dell elettronica in F1 Principali controlli
Model-Based-Design in F1 Team-development e generazione codice in ambienti con un breve time-to-market Riccardo Lodini Indice Ferrari GES Scuderia La storia dell elettronica in F1 Principali controlli
Il Sistema Operativo Ripasso
 ISTITUTO TECNICO SECONDO BIENNIO GIORGIO PORCU www.thegiorgio.it Sommario Concetti di base Sistema Operativo Risorse Funzioni e Struttura Bootstrap, Kernel, Shell Gestione dei Processi Processo e PCB Algoritmi
ISTITUTO TECNICO SECONDO BIENNIO GIORGIO PORCU www.thegiorgio.it Sommario Concetti di base Sistema Operativo Risorse Funzioni e Struttura Bootstrap, Kernel, Shell Gestione dei Processi Processo e PCB Algoritmi
Integrazione tra simulazione numerica e dati reali in procedure automatiche di collaudo
 Integrazione tra simulazione numerica e dati reali in procedure automatiche di collaudo Multisim Connectivity Toolkit Studente: Moreno Favaro mtr:545282 Relatore: Ch.mo prof. A. Sona Università degli studi
Integrazione tra simulazione numerica e dati reali in procedure automatiche di collaudo Multisim Connectivity Toolkit Studente: Moreno Favaro mtr:545282 Relatore: Ch.mo prof. A. Sona Università degli studi
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO L unità di controllo
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO L unità di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it L unità di controllo La vista logica e
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO L unità di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it L unità di controllo La vista logica e
Laboratorio di Informatica. Introduzione
 Introduzione 1 Informatica: definizione Informatica: disciplina che cerca di dare un fondamento scientifico ad argomenti come la progettazione di computer, la programmazione, l elaborazione delle informazioni,
Introduzione 1 Informatica: definizione Informatica: disciplina che cerca di dare un fondamento scientifico ad argomenti come la progettazione di computer, la programmazione, l elaborazione delle informazioni,
ECU implementation. Utilizzo ECU EURO4 EFI Technology. Setting ECU Hardware
 LIFE09 ENV/IT/000216 H2POWER_Hydrogen in fuel gas ECUimplementation UtilizzoECU EURO4EFITechnology. Il veicolo è corredato di propulsore mod. 8149 F1C 3000 e centralina ECU METATRON IAW 1AF. L attività
LIFE09 ENV/IT/000216 H2POWER_Hydrogen in fuel gas ECUimplementation UtilizzoECU EURO4EFITechnology. Il veicolo è corredato di propulsore mod. 8149 F1C 3000 e centralina ECU METATRON IAW 1AF. L attività
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Presentazione del corso
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Presentazione del corso Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Scopo del corso Completare il percorso
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Presentazione del corso Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Scopo del corso Completare il percorso
Un regolatore di tensione a controllo misto analogico/digitale.
 Un regolatore di tensione a controllo misto analogico/digitale. Un esempio di progetto di un sistema di controllo analogico/numerico, della sua verifica e realizzazione mediante tecniche di Model-Based
Un regolatore di tensione a controllo misto analogico/digitale. Un esempio di progetto di un sistema di controllo analogico/numerico, della sua verifica e realizzazione mediante tecniche di Model-Based
Lez. 5 La Programmazione. Prof. Salvatore CUOMO
 Lez. 5 La Programmazione Prof. Salvatore CUOMO 1 2 Programma di utilità: Bootstrap All accensione dell elaboratore (Bootsrap), parte l esecuzione del BIOS (Basic Input Output System), un programma residente
Lez. 5 La Programmazione Prof. Salvatore CUOMO 1 2 Programma di utilità: Bootstrap All accensione dell elaboratore (Bootsrap), parte l esecuzione del BIOS (Basic Input Output System), un programma residente
STUDIO DI MASSIMA DI UN SISTEMA DI INIEZIONE DIRETTA PER UN MOTORE AERONAUTICO
 UNIVERSITA DEGLI STUDI DI BOLOGNA FACOLTA DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica Disegno Tecnico Industriale STUDIO DI MASSIMA DI UN SISTEMA DI INIEZIONE DIRETTA PER UN MOTORE AERONAUTICO
UNIVERSITA DEGLI STUDI DI BOLOGNA FACOLTA DI INGEGNERIA Corso di Laurea in Ingegneria Meccanica Disegno Tecnico Industriale STUDIO DI MASSIMA DI UN SISTEMA DI INIEZIONE DIRETTA PER UN MOTORE AERONAUTICO
CODESYS Test Manager: Incrementare la qualità del software con unità di test CODESYS Users' Conference 2014, Fabio Filipponi
 : Incrementare la qualità del software con unità di test CODESYS Users' Conference 2014, Fabio Filipponi CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Introduzione 2 Introduzione al
: Incrementare la qualità del software con unità di test CODESYS Users' Conference 2014, Fabio Filipponi CODESYS a trademark of 3S-Smart Software Solutions GmbH Agenda 1 Introduzione 2 Introduzione al
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
UNITA CAPITALIZZABILI PER LA FIGURA PROFESSIONALE TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE 73 74 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE UNITÀ CAPITALIZZABILE
Ambienti di Sviluppo SW Classici
 Ambienti di Sviluppo SW Classici Ambienti di sviluppo per Software General Purpose Ambiente per l editing del programma (con funzioni di auto-documentazione) Controllo di Configurazione Compilatore e Debugger
Ambienti di Sviluppo SW Classici Ambienti di sviluppo per Software General Purpose Ambiente per l editing del programma (con funzioni di auto-documentazione) Controllo di Configurazione Compilatore e Debugger
Introduzione ad ISaGRAF
 Ingegneria e Tecnologie dei sistemi di Controllo Introduzione ad ISaGRAF Ing.. Andrea Pagani D.E.I.S. Università di Bologna L.A.R. Laboratorio di Automazione e Robotica Tel: 051 2093069 email: apagani@deis.unibo.it
Ingegneria e Tecnologie dei sistemi di Controllo Introduzione ad ISaGRAF Ing.. Andrea Pagani D.E.I.S. Università di Bologna L.A.R. Laboratorio di Automazione e Robotica Tel: 051 2093069 email: apagani@deis.unibo.it
La simulazione è l'imitazione di un processo o di un sistema reale per un
 1 2 La simulazione è l'imitazione di un processo o di un sistema reale per un determinato periodo di tempo. La simulazione è l'imitazione di un processo o di un sistema reale per un determinato periodo
1 2 La simulazione è l'imitazione di un processo o di un sistema reale per un determinato periodo di tempo. La simulazione è l'imitazione di un processo o di un sistema reale per un determinato periodo
L hardware da solo non è sufficiente per il funzionamento dell elaboratore È necessario introdurre il software:
 Il Software L hardware da solo non è sufficiente per il funzionamento dell elaboratore È necessario introdurre il software: un insieme di programmi che permettono di trasformare un insieme di circuiti
Il Software L hardware da solo non è sufficiente per il funzionamento dell elaboratore È necessario introdurre il software: un insieme di programmi che permettono di trasformare un insieme di circuiti
Corso di programmazione Arduino DI MALVEZZI DAVIDE
 Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
Corso di programmazione Arduino DI MALVEZZI DAVIDE Argomenti Pin digitali e pin analogici Gestione di timer e bottoni Utilizzo della porta seriale Oggetto String Controllo di schermi LCD Utilizzo dell
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo. Classificazione. I microcontrollori
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione General Purpose CISC
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione General Purpose CISC
IL LINGUAGGIO DELL INFORMATICA
 IL LINGUAGGIO DELL INFORMATICA 1.1 Importante imparare il linguaggio dell informatica L uso della terminologia giusta è basilare per imparare una nuova disciplina Parole rappresentano idee e concetti usare
IL LINGUAGGIO DELL INFORMATICA 1.1 Importante imparare il linguaggio dell informatica L uso della terminologia giusta è basilare per imparare una nuova disciplina Parole rappresentano idee e concetti usare
GARA NAZIONALE DI ELETTRONICA
 Piazzale R. Guardini, 1-37138 3 Maggio 2016 Progetto di un CICLOCOMPUTER Si deve realizzare un sistema per la misurazione e la visualizzazione della velocità e dei chilometri totali percorsi per una bicicletta.
Piazzale R. Guardini, 1-37138 3 Maggio 2016 Progetto di un CICLOCOMPUTER Si deve realizzare un sistema per la misurazione e la visualizzazione della velocità e dei chilometri totali percorsi per una bicicletta.
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione Processori
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Processori per sistemi di controllo Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: crossi@deis.unibo.it Classificazione Processori
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 2 Architetture dei dispositivi di controllo e Dispositivi di controllo specializzati Corso di Laurea Codice
Introduzione alla programmazione
 Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Introduzione alla programmazione Risolvere un problema Per risolvere un problema si procede innanzitutto all individuazione Delle informazioni, dei dati noti Dei risultati desiderati Il secondo passo consiste
Model Based Design per lo sviluppo e la verifica di moduli software in ambito Automotive
 Model Based Design per lo sviluppo e la verifica di moduli software in ambito Automotive Automotive SPIN Italia - 4 Workshop on Automotive Software Roberto Sobrito, Software Engineer - FIAT Group Automobiles
Model Based Design per lo sviluppo e la verifica di moduli software in ambito Automotive Automotive SPIN Italia - 4 Workshop on Automotive Software Roberto Sobrito, Software Engineer - FIAT Group Automobiles
STUDIO ED IMPLEMENTAZIONE DI UN SISTEMA DI GESTIONE DA BANCO DELL INIEZIONE COMMON RAIL BOSCH
 STUDIO ED IMPLEMENTAZIONE DI UN SISTEMA DI GESTIONE DA BANCO DELL INIEZIONE COMMON Tesi di Laurea di: Michela Brunori RAIL BOSCH RELATORE: Prof. Ing.. Luca Piancastelli CORRELATORI: Prof.Ing.Gianni Caligiana
STUDIO ED IMPLEMENTAZIONE DI UN SISTEMA DI GESTIONE DA BANCO DELL INIEZIONE COMMON Tesi di Laurea di: Michela Brunori RAIL BOSCH RELATORE: Prof. Ing.. Luca Piancastelli CORRELATORI: Prof.Ing.Gianni Caligiana
PLC CodeSys. Esercitazione 3. Automation Robotics and System CONTROL. Università degli Studi di Ferrara
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Università degli Studi di Ferrara PLC CodeSys Esercitazione 3 Francesca Fanfoni francesca.fanfoni@unimore.it Indice
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Università degli Studi di Ferrara PLC CodeSys Esercitazione 3 Francesca Fanfoni francesca.fanfoni@unimore.it Indice
Analisi dei Requisiti, Progettazione Preliminare ed Esecutiva di Grandi Sistemi Ingegneristici: Casi di Studio
 Seminario di Analisi dei Requisiti, Progettazione Preliminare ed Esecutiva di Grandi Sistemi Ingegneristici: Casi di Studio Corso di Ingegneria dei Sistemi Software e dei Servizi in Rete Parte 5. Evoluzione
Seminario di Analisi dei Requisiti, Progettazione Preliminare ed Esecutiva di Grandi Sistemi Ingegneristici: Casi di Studio Corso di Ingegneria dei Sistemi Software e dei Servizi in Rete Parte 5. Evoluzione
Programma del corso. Elementi di Programmazione. Introduzione agli algoritmi. Rappresentazione delle Informazioni. Architettura del calcolatore
 Programma del corso Introduzione agli algoritmi Rappresentazione delle Informazioni Architettura del calcolatore Reti di Calcolatori Elementi di Programmazione Algoritmi e programmi Algoritmo Sequenza
Programma del corso Introduzione agli algoritmi Rappresentazione delle Informazioni Architettura del calcolatore Reti di Calcolatori Elementi di Programmazione Algoritmi e programmi Algoritmo Sequenza
Esercitazione Strumentazione virtuale
 Esercitazione Strumentazione virtuale - 1 Esercitazione Strumentazione virtuale 1 - Oggetto Introduzione alla strumentazione virtuale. LabView: il pannello frontale e il diagramma a blocchi. Esempi: generatore
Esercitazione Strumentazione virtuale - 1 Esercitazione Strumentazione virtuale 1 - Oggetto Introduzione alla strumentazione virtuale. LabView: il pannello frontale e il diagramma a blocchi. Esempi: generatore
TEORIA DEI SISTEMI OPERATIVI. Sistemi monoprogrammatie multiprogrammati
 TEORIA DEI SISTEMI OPERATIVI Sistemi monoprogrammatie multiprogrammati 1 STRUTTURA DEL SISTEMA OPERATIVO UTENTE La struttura di un sistema operativo è di tipo gerarchico: i programmi che lo compongono
TEORIA DEI SISTEMI OPERATIVI Sistemi monoprogrammatie multiprogrammati 1 STRUTTURA DEL SISTEMA OPERATIVO UTENTE La struttura di un sistema operativo è di tipo gerarchico: i programmi che lo compongono
14. Verifica e Validazione
 14. Verifica e Validazione Come assicurarsi che il software corrisponda alle necessità dell utente? Introdurremo i concetti di verifica e validazione Descriveremo le fasi del processo di testing Parleremo
14. Verifica e Validazione Come assicurarsi che il software corrisponda alle necessità dell utente? Introdurremo i concetti di verifica e validazione Descriveremo le fasi del processo di testing Parleremo
Introduzione a Simulink
 Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
EMBEDDED & MISSION CRITICAL. Engineering At Your Service INTEGRATED SYSTEMS INDUSTRIAL AUTOMATION
 EMBEDDED & MISSION CRITICAL INTEGRATED SYSTEMS INDUSTRIAL AUTOMATION Engineering At Your Service Engineering At Your Service COMPANY ALPHA SI opera nel settore del SW Embedded e Mission Critical inclusi
EMBEDDED & MISSION CRITICAL INTEGRATED SYSTEMS INDUSTRIAL AUTOMATION Engineering At Your Service Engineering At Your Service COMPANY ALPHA SI opera nel settore del SW Embedded e Mission Critical inclusi
ROBOTICA Syllabus Versione 1.0
 ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
Gestire modelli complessi Architettura e Dati Paolo Bizzarri MathWorks Italian Offices 4 Novembre Milano
 Gestire modelli complessi Architettura e Dati Paolo Bizzarri MathWorks Italian Offices 4 Novembre 2014 - Milano 2014 The 2014 The MathWorks, Inc. 1 Modello complesso Sistema complesso? Relazioni tra Sistema
Gestire modelli complessi Architettura e Dati Paolo Bizzarri MathWorks Italian Offices 4 Novembre 2014 - Milano 2014 The 2014 The MathWorks, Inc. 1 Modello complesso Sistema complesso? Relazioni tra Sistema
Laboratorio II, modulo 2 (Fisica) Tecniche di Acquisizione Dati (Informatica)
 Tecniche di Acquisizione Dati (Informatica)") Laboratorio II, modulo 2 (Fisica) Tecniche di Acquisizione Dati (Informatica) 2014-2015 Giovanni Ambrosi giovanni.ambrosi@pg.infn.it Matteo Duranti matteo.duranti@pg.infn.it Schema del corso Cenni di teoria
Laboratorio II, modulo 2 (Fisica) Tecniche di Acquisizione Dati (Informatica) 2014-2015 Giovanni Ambrosi giovanni.ambrosi@pg.infn.it Matteo Duranti matteo.duranti@pg.infn.it Schema del corso Cenni di teoria
UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO. in ambiente Matlab/Simulink. dott. G. Fenu Tecnologie per l automazione
 UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO in ambiente Matlab/Simulink dott. G. Fenu Tecnologie per l automazione Argomenti Presentazione del laboratorio e del sistema da controllare
UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO in ambiente Matlab/Simulink dott. G. Fenu Tecnologie per l automazione Argomenti Presentazione del laboratorio e del sistema da controllare
Programmazione Modulare
 Programmazione Modulare Indirizzo: Elettronica ed Elettrotecnica Disciplina: Sistemi Automatici Classe: IV Ae Ore settimanali previste: 5 ( ore Teoria - ore Laboratorio) La disciplina, nell ambito della
Programmazione Modulare Indirizzo: Elettronica ed Elettrotecnica Disciplina: Sistemi Automatici Classe: IV Ae Ore settimanali previste: 5 ( ore Teoria - ore Laboratorio) La disciplina, nell ambito della
Milano. Gli atti dei convegni e più di contenuti su
 Milano Gli atti dei convegni e più di 8.000 contenuti su www.verticale.net : la metodologia per valutare l interconnessione e gli ulteriori requisiti tecnici Relatori: Alessandro Ferrari 19 Aprile 2017
Milano Gli atti dei convegni e più di 8.000 contenuti su www.verticale.net : la metodologia per valutare l interconnessione e gli ulteriori requisiti tecnici Relatori: Alessandro Ferrari 19 Aprile 2017
Raccolta Test di Laboratorio di Sistemi a Microcontrollore
 Raccolta Test di Laboratorio di Sistemi a Microcontrollore prof. Corrado Santoro 1 Digital I/O 1. Quale delle seguenti istruzioni permette di porre a 0 la linea PC4? GPIOC->ODR &= (int32_t)0x10; GPIOC->ODR
Raccolta Test di Laboratorio di Sistemi a Microcontrollore prof. Corrado Santoro 1 Digital I/O 1. Quale delle seguenti istruzioni permette di porre a 0 la linea PC4? GPIOC->ODR &= (int32_t)0x10; GPIOC->ODR
SISTEMI PER L INDUSTRIA E PLC 10/01/18 Teoria, 30minuti, Minimo 4 punti su 12 di Programmazione
 SISTEMI PER L INDUSTRIA E PLC 10/01/18 Teoria, 30minuti, Minimo 4 punti su 12 di Programmazione 1) Illustrare brevemente le differenze tra PLC, Soft-PLC e Periferia (3 punti) 2) Dato un Timer TON, illustrare
SISTEMI PER L INDUSTRIA E PLC 10/01/18 Teoria, 30minuti, Minimo 4 punti su 12 di Programmazione 1) Illustrare brevemente le differenze tra PLC, Soft-PLC e Periferia (3 punti) 2) Dato un Timer TON, illustrare
Software Scalabile: Controllo di potenza in real-time: Real-time alerts:
 WiLAMP GATEWAY Software Scalabile: Il software di gestione è un controllore in real time. Ha un interfaccia Web facile da usare per configurare settaggi avanzati come lo schedule e le azioni di risposta
WiLAMP GATEWAY Software Scalabile: Il software di gestione è un controllore in real time. Ha un interfaccia Web facile da usare per configurare settaggi avanzati come lo schedule e le azioni di risposta
Settimana n.2. Obiettivi Esecuzione di un programma. Tutorial su CodeBlocks e ambiente di sviluppo.
 Settimana n.2 Obiettivi Esecuzione di un programma. Tutorial su CodeBlocks e ambiente di sviluppo. Contenuti Linguaggi di programmazione Dati e istruzioni Architettura di un elaboratore Uso del compilatore
Settimana n.2 Obiettivi Esecuzione di un programma. Tutorial su CodeBlocks e ambiente di sviluppo. Contenuti Linguaggi di programmazione Dati e istruzioni Architettura di un elaboratore Uso del compilatore
Function Block Diagram
 Function Block Diagram Marco Mauri Politecnico di Milano P.zza Leonardo da Vinci, 32 22-23 Maggio 2001 1 Sommario Struttura del linguaggio e notazioni grafiche Come esprimere espressioni semplici e complesse
Function Block Diagram Marco Mauri Politecnico di Milano P.zza Leonardo da Vinci, 32 22-23 Maggio 2001 1 Sommario Struttura del linguaggio e notazioni grafiche Come esprimere espressioni semplici e complesse
Stack EtherCAT Master e Slave Koenig sul campo
 Stack EtherCAT Master e Slave Koenig sul campo Gianluigi Magnasco easitec S.r.l. gianluigi.magnasco@easitec.it Chi è easitec S.r.l. L offerta di prodotti EtherCAT di easitec ed EtherCAT Soluzioni KPA per
Stack EtherCAT Master e Slave Koenig sul campo Gianluigi Magnasco easitec S.r.l. gianluigi.magnasco@easitec.it Chi è easitec S.r.l. L offerta di prodotti EtherCAT di easitec ed EtherCAT Soluzioni KPA per
Exam of ELECTRONIC SYSTEMS June 15 th, 2012 Prof. Marco Sampietro
 Exam of ELECTRONIC SYSTEMS June 15 th, 2012 Prof. Marco Sampietro Matr. N NAME Problem 1 Operational Amplifier circuit 1. Considerare l amplificatore della figura seguente. Supporre inizialmente di usare
Exam of ELECTRONIC SYSTEMS June 15 th, 2012 Prof. Marco Sampietro Matr. N NAME Problem 1 Operational Amplifier circuit 1. Considerare l amplificatore della figura seguente. Supporre inizialmente di usare
Power Scan Suite. CODE Engineering S.r.l. - Powerscan Suite Serie 5 -
 Power Scan Suite 1 LE PAGINE PRINCIPALI 2 LE PAGINE PRINCIPALI 3 Perchè PowerScan GPS? PowerScan GPS è un sistema semplice, veloce e con un imbattibile rapporto qualità /prezzo ideale per misurare coppia
Power Scan Suite 1 LE PAGINE PRINCIPALI 2 LE PAGINE PRINCIPALI 3 Perchè PowerScan GPS? PowerScan GPS è un sistema semplice, veloce e con un imbattibile rapporto qualità /prezzo ideale per misurare coppia
Introduzione a Matlab e Simulink
 Introduzione a Matlab e Simulink Fondamenti di Automatica 1 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento,
Introduzione a Matlab e Simulink Fondamenti di Automatica 1 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento,
Ing. Emiliano Capuzzo Remote Contro NEC 11/11/2003. Remote Control NEC
 Remote Control NEC Questo progetto risponde all esigenza di decodificare ed utilizzare i codici prodotti da telecomandi IR che adottano la codifica NEC Trasmissione Format. Questo tipo di codifica è attualmente
Remote Control NEC Questo progetto risponde all esigenza di decodificare ed utilizzare i codici prodotti da telecomandi IR che adottano la codifica NEC Trasmissione Format. Questo tipo di codifica è attualmente
L adozione di MATLAB e Simulink nei Corsi di Ingegneria al Politecnico di Milano. Maurizio Magarini MATLAB EXPO Milano, 4 novembre 2014
 L adozione di MATLAB e Simulink nei Corsi di Ingegneria al Politecnico di Milano MATLAB EXPO Milano, 4 novembre 2014 Sommario Introduzione. Il ruolo dei laboratori informatici nella didattica, formazione
L adozione di MATLAB e Simulink nei Corsi di Ingegneria al Politecnico di Milano MATLAB EXPO Milano, 4 novembre 2014 Sommario Introduzione. Il ruolo dei laboratori informatici nella didattica, formazione
Dispositivi per il controllo
 Dispositivi per il controllo ordini di comando PARTE DI COMANDO PARTE DI POTENZA Controllori monolitici Controllori con architettura a bus Controllori basati su PC informazioni di ritorno PLC (Programmable
Dispositivi per il controllo ordini di comando PARTE DI COMANDO PARTE DI POTENZA Controllori monolitici Controllori con architettura a bus Controllori basati su PC informazioni di ritorno PLC (Programmable
Sistema operativo: Introduzione
 Dipartimento di Elettronica ed Informazione Politecnico di Milano Informatica e CAD (c.i.) - ICA Prof. Pierluigi Plebani A.A. 2008/2009 Sistema operativo: Introduzione La presente dispensa e da utilizzarsi
Dipartimento di Elettronica ed Informazione Politecnico di Milano Informatica e CAD (c.i.) - ICA Prof. Pierluigi Plebani A.A. 2008/2009 Sistema operativo: Introduzione La presente dispensa e da utilizzarsi
Appunti di SISTEMI OPERATIVI
 Appunti di SISTEMI OPERATIVI AVVERTENZE Questi appunti non vogliono essere degni sostituti di un buon libro di testo e hanno il solo scopo di aiutare gli studenti dei corsi di informatica che affrontano
Appunti di SISTEMI OPERATIVI AVVERTENZE Questi appunti non vogliono essere degni sostituti di un buon libro di testo e hanno il solo scopo di aiutare gli studenti dei corsi di informatica che affrontano
PIANO DI LAVORO DEI DOCENTI
 Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Mod. F04/EV SET DI MODULI APPLICATIVI PER MICROPROCESSORI E MICROCONTROLLORI INTRODUZIONE. 1- MODULO BASE mod. F04-0/EV SPECIFICHE TECNICHE:
 SET DI MODULI APPLICATIVI PER MICROPROCESSORI E MICROCONTROLLORI Mod. F04/EV INTRODUZIONE Questo sistema di moduli con applicazioni varie, funziona collegato direttamente ad un altro modulo con microprocessore
SET DI MODULI APPLICATIVI PER MICROPROCESSORI E MICROCONTROLLORI Mod. F04/EV INTRODUZIONE Questo sistema di moduli con applicazioni varie, funziona collegato direttamente ad un altro modulo con microprocessore
Progetto W.I.S.E - Wastewater Integrated System Enhancement
 PROGETTO PER LA REALIZZAZIONE DELLA PIATTAFORMA DECISIONALE INTEGRATA PER LA PREVISIONE DEGLI ALLAGAMENTI E LORO MITIGAZIONE TRAMITE L ELABORAZIONE DI STRATEGIE OTTIMALI IN TEMPO REALE Il progetto W.I.S.E.
PROGETTO PER LA REALIZZAZIONE DELLA PIATTAFORMA DECISIONALE INTEGRATA PER LA PREVISIONE DEGLI ALLAGAMENTI E LORO MITIGAZIONE TRAMITE L ELABORAZIONE DI STRATEGIE OTTIMALI IN TEMPO REALE Il progetto W.I.S.E.
Sistema Operativo (Software di base)
") Il Software Il software del PC Il computer ha grandi potenzialità ma non può funzionare senza il software. Il software essenziale per fare funzionare il PC può essere diviso nelle seguenti componenti:
Il Software Il software del PC Il computer ha grandi potenzialità ma non può funzionare senza il software. Il software essenziale per fare funzionare il PC può essere diviso nelle seguenti componenti:
Flusso di Progetto Mixed Signal in ambiente CADENCE. Approccio Analog Centric. Corso di Progettazione Mixed Signal 19/12/2013 Prof.
 Flusso di Progetto Mixed Signal in ambiente CADENCE Approccio Analog Centric Ambiente per Progetto Analogico Full-Custom Ambiente CAD: CADENCE Virtuoso Schematic Virtuoso Schematic Editor Simulation ADE:
Flusso di Progetto Mixed Signal in ambiente CADENCE Approccio Analog Centric Ambiente per Progetto Analogico Full-Custom Ambiente CAD: CADENCE Virtuoso Schematic Virtuoso Schematic Editor Simulation ADE:
INTERFACCE MEMORY-MAPPED. Grazia Pagano DMI, Seminario di Sistemi dedicati 8 Gennaio 2018
 INTERFACCE MEMORY-MAPPED Grazia Pagano DMI, Seminario di Sistemi dedicati 8 Gennaio 2018 INTERFACCE MEMORY-MAPPED Introduzione Registro mappato in memoria Mailbox con handshake FIFO queues Protocolli di
INTERFACCE MEMORY-MAPPED Grazia Pagano DMI, Seminario di Sistemi dedicati 8 Gennaio 2018 INTERFACCE MEMORY-MAPPED Introduzione Registro mappato in memoria Mailbox con handshake FIFO queues Protocolli di
SOLUZIONI DI CONTROLLO PER MACCHINE AD ALTE PRESTAZIONI : IL CASO SYNCRONO DI PRIMA INDUSTRIE
 AUTOMAZIONE E COMPETITIVITÀ DALL IDEA AL MERCATO : QUANDO LA TECNOLOGIA CREA IL SUCCESSO SOLUZIONI DI CONTROLLO PER MACCHINE AD ALTE PRESTAZIONI : IL CASO SYNCRONO DI PRIMA INDUSTRIE Antonella Lacasella
AUTOMAZIONE E COMPETITIVITÀ DALL IDEA AL MERCATO : QUANDO LA TECNOLOGIA CREA IL SUCCESSO SOLUZIONI DI CONTROLLO PER MACCHINE AD ALTE PRESTAZIONI : IL CASO SYNCRONO DI PRIMA INDUSTRIE Antonella Lacasella
Introduzione alle architetture per il controllo dei manipolatori
 Introduzione alle architetture per il controllo dei manipolatori Nicola SMALDONE Controllo digitale Perché un sistema di elaborazione dati? Le uscite dell impianto vengono campionate mediante un convertitore
Introduzione alle architetture per il controllo dei manipolatori Nicola SMALDONE Controllo digitale Perché un sistema di elaborazione dati? Le uscite dell impianto vengono campionate mediante un convertitore
Proposte di Tesi di Laurea
 A3R S.r.l. via E. Ortolani 102, 00125, Rome, Italy Tel. +39 06 60513522, Fax. +39 06 96708536, www.a3r.it A3R, 2010; all rights reserved THIS PAGE IS INTENTIONALLY LEFT BLANK 1. CONTROLLORE DISCRETO MIMO
A3R S.r.l. via E. Ortolani 102, 00125, Rome, Italy Tel. +39 06 60513522, Fax. +39 06 96708536, www.a3r.it A3R, 2010; all rights reserved THIS PAGE IS INTENTIONALLY LEFT BLANK 1. CONTROLLORE DISCRETO MIMO
ITI M. FARADAY. Programmazione a. s
 ITI M. FARADAY Programmazione a. s. 2018-2019 Disciplina: INFORMATICA Indirizzo: INFORMATICA E TELECOMUNICAZIONI Classi: Terza A Terza B Ore settimanali previste: 6 (3 ora Teoria - 3 ore Laboratorio) Docenti:
ITI M. FARADAY Programmazione a. s. 2018-2019 Disciplina: INFORMATICA Indirizzo: INFORMATICA E TELECOMUNICAZIONI Classi: Terza A Terza B Ore settimanali previste: 6 (3 ora Teoria - 3 ore Laboratorio) Docenti:
Finalità del corso Argomenti trattati Materiale didattico Calendario Modalità d esame Possibili progetti
 Politecnico di Milano Embedded Systems Anno Accademico 2009-10 Lecturer: Prof. William Fornaciari Politecnico di Milano, DEI fornacia@elet.polimi.it home.dei.polimi.it/fornacia Sommario Finalità del corso
Politecnico di Milano Embedded Systems Anno Accademico 2009-10 Lecturer: Prof. William Fornaciari Politecnico di Milano, DEI fornacia@elet.polimi.it home.dei.polimi.it/fornacia Sommario Finalità del corso
MCQ Data Aquisition Board. Preliminary Datasheet
 MCQ Data Aquisition Board Preliminary Datasheet Technical Data Sheet Caratteristiche: Risoluzione: Massima 24-bit Numero di canali: 8 Frequenza di campionamento: da 50 Hz a 2 KHz programmabile per canale.
MCQ Data Aquisition Board Preliminary Datasheet Technical Data Sheet Caratteristiche: Risoluzione: Massima 24-bit Numero di canali: 8 Frequenza di campionamento: da 50 Hz a 2 KHz programmabile per canale.
AXO - Architettura dei Calcolatori e Sistema Operativo. organizzazione strutturata dei calcolatori
 AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
Tesina per l esame di Sistemi Operativi a cura di Giuseppe Montano. Prof. Aldo Franco Dragoni
 Sistemi operativi real time basati su : gestione delle risorse e dei processi. Tesina per l esame di Sistemi Operativi a cura di. Prof. Aldo Franco Dragoni Corso di laurea in Ingegneria Informatica e dell
Sistemi operativi real time basati su : gestione delle risorse e dei processi. Tesina per l esame di Sistemi Operativi a cura di. Prof. Aldo Franco Dragoni Corso di laurea in Ingegneria Informatica e dell
Ingegneria del software
 Ingegneria del software Il test d integrazione Si testano sistemi o sottosistemi composti Conviene che sia di tipo black-box Si testa l interazione dei componenti. Non interessa come sono fatti dentro.
Ingegneria del software Il test d integrazione Si testano sistemi o sottosistemi composti Conviene che sia di tipo black-box Si testa l interazione dei componenti. Non interessa come sono fatti dentro.
SECONDO BIENNIO ISTITUTO TECNICO ELETTRONICA ED ELETTROTECNICA
 SETTORE TECNOLOGICO ISTITUTO TECNICO INDIRIZZO ELETTRONICA ED ELETTROTECNICA ARTICOLAZIONE ELETTRONICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento, Art.5, comma 1 Nota: Le Competenze,
SETTORE TECNOLOGICO ISTITUTO TECNICO INDIRIZZO ELETTRONICA ED ELETTROTECNICA ARTICOLAZIONE ELETTRONICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento, Art.5, comma 1 Nota: Le Competenze,
2. Finalità generali previste dalle indicazioni nazionali
 2. Finalità generali previste dalle indicazioni nazionali Le Linee Guida ministeriali per i curricola del Secondo biennio dell Istituto Tecnico Tecnologico, Indirizzo Informatica e Telecomunicazioni -
2. Finalità generali previste dalle indicazioni nazionali Le Linee Guida ministeriali per i curricola del Secondo biennio dell Istituto Tecnico Tecnologico, Indirizzo Informatica e Telecomunicazioni -
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTI CLASSI RISULTATI DI APPRENDIMENTO PROGRAMMAZIONE ANNUALE A.S. 2016-2017 MECCANICA
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 17 / 09 / 2016 Pag. 1 di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTI CLASSI RISULTATI DI APPRENDIMENTO PROGRAMMAZIONE ANNUALE A.S. 2016-2017 MECCANICA
Arduino/Raspberry Board and GSM Library
 Necessità di trovare una soluzione per la gestione delle diverse breakout GSM Gestione dei motori GSM di costruttori diversi: SIMCOM (SIM800C, SIM900 ecc) QUECTEL (M95) FIBOCOM (G510) Interfacciamento
Necessità di trovare una soluzione per la gestione delle diverse breakout GSM Gestione dei motori GSM di costruttori diversi: SIMCOM (SIM800C, SIM900 ecc) QUECTEL (M95) FIBOCOM (G510) Interfacciamento
Schema del corso. Prerequisiti. Lezioni ed esame 28/03/17. Tecniche di Acquisizione Dati aa
 Tecniche di Acquisizione Dati aa 2016-2017 Cenni di teoria dei segnali Schema del corso Giovanni Ambrosi Giovanni.Ambrosi@pg.infn.it Elettronica analogica e digitale Programmi e metodi di acquisizione
Tecniche di Acquisizione Dati aa 2016-2017 Cenni di teoria dei segnali Schema del corso Giovanni Ambrosi Giovanni.Ambrosi@pg.infn.it Elettronica analogica e digitale Programmi e metodi di acquisizione
Progetto e sviluppo di un banco HIL per sistemi automobilistici di controllo attivo del rollio
 Progetto e sviluppo di un banco HIL per sistemi automobilistici di controllo del rollio Relatori: Prof. Nicolò D Alfio Prof. Mauro Velardocchia Candidati: Alessandro Fassio Roberto Fassio PAROLE CHIAVE:
Progetto e sviluppo di un banco HIL per sistemi automobilistici di controllo del rollio Relatori: Prof. Nicolò D Alfio Prof. Mauro Velardocchia Candidati: Alessandro Fassio Roberto Fassio PAROLE CHIAVE:
L Automatic Control Telelab
 Università di Siena L Marco Casini Dipartimento di Ingegneria dell Informazione Università di Siena, Italy Email: casini@ing.unisi.it UNIVERSITA DI SIENA 1 Sommario Introduzione all (ACT) Descrizione di
Università di Siena L Marco Casini Dipartimento di Ingegneria dell Informazione Università di Siena, Italy Email: casini@ing.unisi.it UNIVERSITA DI SIENA 1 Sommario Introduzione all (ACT) Descrizione di
Corso di ELETTRONICA INDUSTRIALE INVERTITORI MONOFASE A TENSIONE IMPRESSA
 1 Corso di LTTRONICA INDUSTRIAL INVRTITORI MONOFAS A TNSION IMPRSSA 0. 2 Principi di funzionamento di invertitori monofase a tensione impressa 0. 3 Principi di funzionamento di invertitori monofase a tensione
1 Corso di LTTRONICA INDUSTRIAL INVRTITORI MONOFAS A TNSION IMPRSSA 0. 2 Principi di funzionamento di invertitori monofase a tensione impressa 0. 3 Principi di funzionamento di invertitori monofase a tensione
Problema Posto s = n 2 a) calcolare la somma s per n=30 b) determinare il più piccolo intero n tale che s>30000
 calcolare la somma s per n=30 b) determinare il più piccolo intero n tale che s>30000") Problema Posto s = 1 2 + 2 2 + 3 2 + + n 2 a) calcolare la somma s per n=30 b) determinare il più piccolo intero n tale che s>30000 Somma quadrati (for next).xlsm Somma quadrati (do loop).xlsm Nota La
Problema Posto s = 1 2 + 2 2 + 3 2 + + n 2 a) calcolare la somma s per n=30 b) determinare il più piccolo intero n tale che s>30000 Somma quadrati (for next).xlsm Somma quadrati (do loop).xlsm Nota La
Marco Tarini - Università dell'insubria A.A. 2016/17. Università degli Studi dell Insubria Dipartimento di Scienze Teoriche e Applicate
 Università degli Studi dell Insubria Dipartimento di Scienze Teoriche e Applicate Astrazione e Macchine Virtuali parte 2: in un tipico calcolatore I livelli nei moderni calcolatori 6. Livello delle applicazioni
Università degli Studi dell Insubria Dipartimento di Scienze Teoriche e Applicate Astrazione e Macchine Virtuali parte 2: in un tipico calcolatore I livelli nei moderni calcolatori 6. Livello delle applicazioni
I.T.I.S. M. Faraday Dipartimento Tecnologico Programmazione Modulare PROGETTO DIDATTICO DELLA DISCIPLINA
 ANNO SCOLASTICO 2018/2019 DISCIPLINA: TECNOLOGIE INFORMATICHE INDIRIZZO: TUTTI DOCENTI: PROF.SSA BRIZZI MARIA CLASSI: IB, IC, ID, IE PROGETTO DIDATTICO DELLA DISCIPLINA In relazione a quanto richiesto
ANNO SCOLASTICO 2018/2019 DISCIPLINA: TECNOLOGIE INFORMATICHE INDIRIZZO: TUTTI DOCENTI: PROF.SSA BRIZZI MARIA CLASSI: IB, IC, ID, IE PROGETTO DIDATTICO DELLA DISCIPLINA In relazione a quanto richiesto
Laboratorio di Informatica. Introduzione. Laboratorio di Informatica
 Introduzione 1 Scopo della lezione Introdurre le nozioni base della materia Definire le differenze tra hardware e software Individuare le applicazioni e le aree disciplinari 2 Informatica: definizione
Introduzione 1 Scopo della lezione Introdurre le nozioni base della materia Definire le differenze tra hardware e software Individuare le applicazioni e le aree disciplinari 2 Informatica: definizione
Sistemi e Tecnologie per l'automazione LS
 Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS Programmable Logic Controllers Ing. Andrea
Laurea Specialistica in Ingegneria Informatica Laurea Specialistica in Ingegneria Elettronica e delle Telecomunicazioni Sistemi e Tecnologie per l'automazione LS Programmable Logic Controllers Ing. Andrea
Introduzione alla Simulazione
 Introduzione alla Simulazione Discrete-event simulation (DES) Modelli Stocastici e Dinamici Le variabili di stato cambiano valore solo in corrispondenza di eventi discreti, determinati a loro volta da
Introduzione alla Simulazione Discrete-event simulation (DES) Modelli Stocastici e Dinamici Le variabili di stato cambiano valore solo in corrispondenza di eventi discreti, determinati a loro volta da
Controlli Automatici. Maria Gabriella Xibilia Blocco B piano 7 Tel. 7328
 Controlli Automatici Maria Gabriella Xibilia Blocco B piano 7 Tel. 7328 Libri di testo Bolzern, Scattolini, Schiavone Fondamenti di controlli automatici Mc-Graw Hill III edizione Isidori Sistemi di Controllo
Controlli Automatici Maria Gabriella Xibilia Blocco B piano 7 Tel. 7328 Libri di testo Bolzern, Scattolini, Schiavone Fondamenti di controlli automatici Mc-Graw Hill III edizione Isidori Sistemi di Controllo
Scopo del laboratorio
 p. 1/1 Scopo del laboratorio Imparare ad usare programmi che implementino metodi di ottimizzazione: simplesso, branch and bound ecc. utilizzarli per risolvere un problema proposto Modellatori Solver p.
p. 1/1 Scopo del laboratorio Imparare ad usare programmi che implementino metodi di ottimizzazione: simplesso, branch and bound ecc. utilizzarli per risolvere un problema proposto Modellatori Solver p.
Indice. Introduzione 15. L hardware 24. Il software 43. Introduzione al linguaggio di Arduino 60. Basi del linguaggio di Arduino 65
 Indice Introduzione 15 1.1 - Un po di storia 15 1.2 - Le vecchie schede 18 1.3 - La filosofia open 23 L hardware 24 2.1 - La scheda Arduino UNO 24 2.1.1 - Avvertenze sull uso della scheda 27 2.2 - Il microcontrollore
Indice Introduzione 15 1.1 - Un po di storia 15 1.2 - Le vecchie schede 18 1.3 - La filosofia open 23 L hardware 24 2.1 - La scheda Arduino UNO 24 2.1.1 - Avvertenze sull uso della scheda 27 2.2 - Il microcontrollore
HTS-VOICE Aggiornamento e Programmazione tramite HPP-22
 HTS-VOICE Aggiornamento e Programmazione tramite HPP-22 Per sfruttare al massimo il modulo vocale HTS-Voice è necessario aggiornare l unità alla versione 1.03 (se riechiesto) e programmare il modulo tramite
HTS-VOICE Aggiornamento e Programmazione tramite HPP-22 Per sfruttare al massimo il modulo vocale HTS-Voice è necessario aggiornare l unità alla versione 1.03 (se riechiesto) e programmare il modulo tramite
IL VHDL. Perché si usa un linguaggio di descrizione dell'hardware? Permette di formalizzare il progetto di sistemi digitali complessi
 IL VHDL Cosa è il VHDL? NON è un linguaggio di programmazione! E' uno standard IEEE per la descrizione dell'hardware VHDL: VHSIC Hardware Description Language VHSIC: Very High Speed Integrated Circuit
IL VHDL Cosa è il VHDL? NON è un linguaggio di programmazione! E' uno standard IEEE per la descrizione dell'hardware VHDL: VHSIC Hardware Description Language VHSIC: Very High Speed Integrated Circuit
CALCOLATORI ELETTRONICI
 DIPARTIMENTO DI INGEGNERIA ELETTRICA ELETTRONICA E INFORMATICA Corso di laurea in Ingegneria elettronica Anno accademico 2017/2018-3 anno CALCOLATORI ELETTRONICI 9 CFU - 2 semestre Docente titolare dell'insegnamento
DIPARTIMENTO DI INGEGNERIA ELETTRICA ELETTRONICA E INFORMATICA Corso di laurea in Ingegneria elettronica Anno accademico 2017/2018-3 anno CALCOLATORI ELETTRONICI 9 CFU - 2 semestre Docente titolare dell'insegnamento
Prime esperienze con la breadboard
 Progettazione nell'ambiente LPCXpresso Introduzione alla progettazione di sistemi embedded a microcontrollore Prime esperienze con la breadboard All text and image content in this document is licensed
Progettazione nell'ambiente LPCXpresso Introduzione alla progettazione di sistemi embedded a microcontrollore Prime esperienze con la breadboard All text and image content in this document is licensed
Sistemi Informativi Aziendali. Programma del corso
 Sistemi Informativi Aziendali Corso di Laurea in Ingegneria Gestionale Programma del corso Anno Accademico 2008/09 Docente: Massimo Cossentino Programma del corso a.a. 2008-09 Introduzione al corso ICT
Sistemi Informativi Aziendali Corso di Laurea in Ingegneria Gestionale Programma del corso Anno Accademico 2008/09 Docente: Massimo Cossentino Programma del corso a.a. 2008-09 Introduzione al corso ICT