ROBOCUP JR ITALIA 2012
|
|
|
- Erico Parisi
- 7 anni fa
- Visualizzazioni
Transcript
1 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile Della squadra Penelope Istituto I.T. ARCHIMEDE CATANIA
2 La Rete di scuole per la Robocup Jr ITALIA è espressione dell Autonomia scolastica regolata dal D.P.R. 275/99 (art. 7) che permette alle scuole statali di operare sinergicamente per obiettivi condivisi e ritenuti importanti per l offerta formativa erogata all utenza. La Rete di scuole è nata sulla condivisione di una serie di principi EDUCATIVI e DIDATTICI riferiti alla realtà della scuola italiana. Questi principi e le conseguenti proposte operative erano stati riportati in un documento del maggio 2008 dal titolo: Manifesto per una RoboCupJr italiana - una proposta per la diffusione dell utilizzo didattico della Robotica nelle scuole a cura di Andrea Bonarini, Augusto Chioccariello e Giovanni Marcianò. Maggio 2008 L obiettivo della Rete organizzare l edizione italiana della Robocup Jr concretizza una spinta al confronto e alla collaborazione tra Istituti scolastici, elementi che motivano docenti e studenti all impegno nell innovazione, sia didattica che tecnologica, affrontando i problemi che costituiscono uno standard internazionale dal 2000, quando la Robocup (manifestazione riservata alle Università di tutto il mondo) ha proposto le tre gare per la scuola: Dance Rescue Soccer. La Robocup Jr ITALIA è Una manifestazione nazionale fondata di tre punti forti: 1. una struttura che cura l organizzazione e gestisce gli aspetti di organizzazione, promozione, svolgimento ai diversi livelli, regionali e nazionali; 2. un contenuto condiviso, ovvero regolamenti, formule di gara, supporto formativo e informativo ai partecipanti; 2
3 3. una documentazione delle proposte didattiche e del lavoro degli studenti che coinvolgono l uso di kit o robot auto costruiti per la partecipazione agli eventi organizzati dalla Rete. Questo volumetto appartiene alla collana di documentazione. Sul piano organizzativo e gestionale della Rete di scuole lo Statuto prevede organismi ben distinti ma fortemente integrati: COMITATO DI GESTIONE formato dai Dirigenti scolastici degli Istituti fondatori o associati alla Rete. Si riunisce due volte l anno in via ordinaria, e online per decisioni straordinarie. ISTITUTO CAPOFILA come previsto dal DPR 275/99 cura gli aspetti burocratici, amministrativi e contabili della Rete. Il Dirigente scolastico dell Istituto capofila è il legale rappresentante della Rete e provvede a dare esecuzione alle delibere del Comitato di Gestione. COMITATO TECNICO formato dai docenti referenti degli Istituti fondatori o associati alla Rete, provvede a definire il Bando e i Regolamenti di gara per la manifestazione annuale nazionale, trasmettendoli al Comitato di gestione che li deve approvare. COMITATO LOCALE - Cura l edizione annuale della manifestazione, ed è formato a cura del Istituto fondatore o associato a cui il Comitato di Gestione ha assegnato la cura dell evento. ISTITUTI PARTECIPANTI iscrivendosi alle gare, beneficiano del supporto della Rete ma non partecipano alle decisioni gestionali o tecniche. La partecipazione alla gara nazionale li rende idonei per aderire alla Rete. Diversamente serve il parere del Comitato Tecnico. 3
4 autori Catania Marco De Domenico Federico Costanzo Giacomo Ziino Andrea NOME SQUADRA PENELOPE PARTECIPA ALLA GARA DI RESCUE A Istituto Tecnico Industriale ARCHIMEDE Catania 4
5 CAP. 1 - DATI GENERALI (indicazione dei componenti della squadra, istituto di provenienza, docente/i responsabile, altro ) La squadra è composta dai seguenti componenti: 1. Catania Marco classe quarta spec. Elettronica 2. De Domenico Federico classe quinta spec. Elettronica 3. Costanzo Giacomo terza spec. Meccanica 4. Ziino Andrea classe quinta spec. Elettronica Il docente responsabile che accompagna la squadra è il Prof. Arcidiacono Pietro dell I.T. Archimede di Catania. 5
6 CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE (Descrizione della storia della partecipazione alla Robocup Jr Italia. Chi ha lanciato l idea, chi l ha raccolta, dubbi, ostacoli e aiuti ricevuti, dalla scuola, dalle famiglie, da amici e supporters ) Già a partire dagli anni '80 e '90 nell IT Archimede sono stati realizzati piccoli automi intelligenti, dotati di appositi sensori, che potevano muoversi in un percorso con ostacoli, seguendo una linea nera di riferimento. Inoltre durante lo studio delle discipline della specializzazione Elettronica e Telecomunicazioni era prevista un'apposita attività denominata Area di Progetto, che aveva obiettivi formativi di tipo professionalizzante e portava spesso alla realizzazione di dispositivi per l automazione. Grazie anche alla collaborazione con una nota azienda elettronica multinazionale presente nel territorio, si realizzavano inoltre corsi di aggiornamento per gli insegnanti e corsi di post - diploma per gli alunni già diplomati, che avevano come obiettivo principale la conoscenza e l uso del microprocessore Z80 e successivamente del microcontrollore ST6. Appunto con i microcontrollori sono stati realizzati progetti interessanti come inseguitori intelligenti di luce con pannelli fotovoltaici, centraline automatiche per ascensori, case intelligenti con controllo di luce, temperatura, allarmi gas ed intrusioni collegati anche al PC, robot con telecamera e 6
7 sensori ultrasuoni per l esplorazione autonoma di ambienti e invio di immagini a distanza. Proprio quest'ultimo progetto, dell'anno scolastico , ha destato l'interesse della Facoltà d'ingegneria, con cui si ipotizzò una collaborazione didatticoscientifica sulla Robotica, che diventò concreta nel Fig. 1 - Robot anno 2000 Si partecipò così all'organizzazione del campionato mondiale Eurobot 2006 a Santa Tecla (Acireale). Si partecipò alle gare di Minirobot, una competizione per scuole superiori organizzata dall università di ingegneria e basata sul kit Lego Mindstorm. Il kit della Lego è basato su microcontrollore della serie ARM7 a 32 bit, può gestire 3 motori e quattro sensori ed è corredato da tutta una serie di parti meccaniche e ingranaggi che permettono di costruire la struttura portante 7
8 dei robot in modo semplice e veloce. Sulla scorta dell esperienza acquisita si decise di partecipazione in aprile 2010 all'edizione della Robocup Junior ( in programma a Vicenza. L' idea era di sfruttare gli studi già svolti sull'equilibrio degli umanoidi e sui sensori accelerometri e giroscopi per programmare movimenti fluidi ed accattivanti su un kit della Hitec. L'idea di imitare in qualche modo i movimenti di Robodance del compianto artista Michael Jackson, al ritmo della sua musica, prende corpo con un lavoro di programmazione e prove accurate che consente la vittoria nel campionato nazionale sezione Dance e la qualifica per i mondiali di Singapore. Fig. 2 - I mondiali di Singapore Si tratta di un risultato di grande prestigio, che ci mette nelle condizioni di rappresentare l'italia e soprattutto di confrontarci con le 8
9 esperienze più valide ed innovative. Ai Robot già disponibili si affianca un altro umanoide della V-stone, con movimenti ancora più fluidi grazie ad una sensoristica più evoluta. Ma soprattutto i partecipanti progettano e realizzano una scenografia con luci che seguono il ritmo di musica ed altri effetti luminosi (girandole di led). Il risultato finale di Singapore è certamente lusinghiero, con la posizione nella top- ten e l'ottavo posto come nazione e ci ha portato a candidarci con successo per l'organizzazione della Robocup Negli anni il gruppo che si occupa di robotica nell istituto si è ingrandito sia nella componente studenti che nella componente insegnanti, aggregando e integrando, come d altra parte è necessario, i contributi di discipline e competenze diverse quali la meccanica, l informatica e l elettronica. 9
10 CAP. 3 NOME E STRUTTURA DEL ROBOT (A partire dalla scelta motivata del nome, illustrare dettagliatamente l architettura del robot anche mediante schemi a blocchi, in cui mettere in evidenza l interfaccia dell unità centrale (scheda madre, mattoncino ecc) con le periferiche.) Il nome scelto per il nostro robot è Provvidenza, nato spontaneamente, durante l idealizzazione del progetto. Funzioni robot rescue: 1) Inseguimento linea 2) Aggiramento ostacoli 3) Superamento dossi 4) Spostamento stecchini 5) Allinearsi nella salita 6) Eseguire la salita 7) Allinearsi nell ingresso stanza superiore 8) Ricerca della vittima 9) Avvicinarsi alla vittima 10) Prendere la vittima 11) Trasportarla sul podio 12) Posarla sul podio 13) Vittoria!!! Funzione n 1 Sensore chiaro/scuro (5 pz.) Encoder + implementazione algoritmo odometria Funzione n 2 Ultrasuoni (2 frontali + 2 laterali) Encoder + odometria T.S.O.P. Funzione n 3 10
11 Interruttore dosso (spazzole) posizionati davanti Encoder + odometria Funzione n 4 Spostamento stecchini con soluzione meccanica tramite gonnellina Funzione n 5 Encoder + odometria Sensori di tocco (2 anteriori e 2 posteriori) Funzione n 6 Inclinometro Encoder + odometria / seguilinea Funzione n 7 Guarda funzione n 5 Funzione n 8 =n 9 Encoder + odometria T.S.O.P Funzione n 10 Motori pinza e motori cremagliera Sensore finecorsa Funzione n 11 Encoder + odometria Sensore di tocco per allineamento col podio Funzione n 12 Utilizzo motori pinza e motori cremagliera Finecorsa Funzione n 13 Esultare la vittoria sul podio 11
12 12
13 CAP. 4 MECCANICA (Indicare le soluzioni meccaniche adottate, precisando la natura del contributo apportato al robot, eventuali modifiche ai kit, o soluzioni auto costruite. Ad esempio realizzazione o modifica del telaio, montaggio dei motori ecc. Per le realizzazioni particolari come ad esempio pinze, sistemi di trazione ecc. sarebbe bene illustrare la documentazione mediante foto o disegni CAD.) Il robot è nato dalle idee e dalle carte realizzate dai membri del nostro team. Il robot è costruito interamente in alluminio lavorandolo con macchine a controllo numerico risiedenti nei pressi dei laboratori dell' IT Archimede; la struttura è così strutturata: una lastra di alluminio da 6mm di spessore è stata usata come base e su di essa è stata avvitata una torretta che sorregge il particolare scorrevole a cuscinetti che permette il movimento ascensionale alle pinze. Il moto è trasmesso tramite un sistema rocchetto-cremagliera in acciaio. Il sistema di locomozione è composto da due ruote motrici calettate su due motori e con delle o-ring in neoprene, tramite due pulegge in alluminio, trasmettono il moto a due rotini posteriori installati su due cuscinetti a sfera. Il tutto contenuto in 3,5Kg. Tutti i componenti meccanici che compongono il robot sono stati prima progettati al computer, per essere successivamente realizzati alle macchine utensili, mantenendo così una coerenza tra progetto e prodotto. Dapprima abbiamo progettato la struttura portante, consistente nella piastra d alluminio su cui giacciono i quattro motori di trazione, l ascensore porta-pinza e tutti gli organi di supporto per l elettronica e la sensoristica. Costruite da noi sono anche le quattro ruote. 13
14 In un secondo tempo abbiamo ideato i componenti che consentono di prelevare la vittima e di posarla nel piano rialzato:la pinza,a due bracci motorizzati indipendenti, è montata su di un ascensore scorrevole dotato di una guida di precisione a ricircolo di sfere. Gli organi di presa della pinza sono in alluminio. Inseriamo per ultimo (non come fattore di importanza) l inclinometro, il dispositivo che ci permette di comprendere l inizio della rampa, consistente in un piano inclinato di più o meno 25 e che abbiamo costruito noi Gli altri elementi di meccanica sono tutti i supporti per le schede elettroniche e le staffe per i sensori. CALCOLI FORZE E COPPIE DEI SERVOMOTORI FORZA PESO ROBOT: 30 N [Newton] DIMENSIONI MASSIME: 230 X 200 X h 230 [mm] CALCOLO FORZA NECESSARIA AL MOTO: Fa = (mv x Fr) / r = 1 N mv(coefficiente di attrito volvente ruota-legno) in [mm] = 1 mm r(raggio della ruota con pneumatico)=32,5 mm Fr(forza peso del robot) Assumendo una pendenza della salita di circa il 40%, la forza massima necessaria al nostro robot è: Fmax= Fa x 1,4 = 1,4 N CALCOLO COPPIA ALLA RUOTA[Mt]: Poiché le ruote motrici sono 4; F1 = Fmax / 4 = 0,35 N Mt = F1 x r = 11,4 N*mm Un servo AX-12 sviluppa una coppia di 10 kgf*cm, ovvero di 1000 N*mm; 11,4 N*mm denota quindi un campo di sicurezza molto elevato. CALCOLO FORZA NECESSARIA A TENERE LA VITTIMA: 14
15 La pinza comprende due bracci motorizzati ognuno con il proprio motore che sviluppa una coppia (Mt) di 4,5 kg*cm = 450 N*mm.La lunghezza del braccio (b) vale 50 mm, pertanto troviamo la forza premente (F) : F = Mt / b = 9 N Tenendo conto del coefficiente d attrito radente (mr) tra la gomma delle pinze e l alluminio della lattina pari a 0,5; abbiamo la forza premente corretta (Fc) : Fc = F x mr = 4,5 N La Fc dobbiamo moltiplicarla per 2, numero dei motori = 9 N. Considerando ipoteticamente la forza peso della vittima pari a 1 N = 100 gr siamo in sicurezza di quasi 10 volte. CALCOLO FORZA NECESSARIA AL SOLLEVAMENTO DELLA VITTIMA Per l ascensore abbiamo montato un servo uguale a quelli della pinza e sfruttato il sistema di trasmissione a rocchettocremagliera con rendimento meccanico di circa il 90%. Dalla coppia (Mt), uguale a quella precedentemente calcolata [ motore dello stesso tipo], il raggio della ruota dentata (rp) e il rendimento, troviamo la Forza occorrente al sollevamento vittima: Fa = Mt / rp x 0,9 = 16,2 N Il sistema di sollevamento [pinza, motori, slitta] non supera i 5 N di forza peso, in questo modo il fattore di sicurezza vale 16,2 N / 5 N, ovvero circa 3, più che ottimo per assicurarne un regolare funzionamento. DAL LAVORO : 15
16 16
17 17
18 AL PRODOTTO : 18
19 19
20 L INCLINOMETRO Esso è composto da uno spezzone di tubo in acciaio inox, chiuso alle estremità da due tappi isolanti in plastica (fatti al tornio) su cui abbiamo avvitato una vite per tappo. Montato sul robot il tubo leggermente inclinato in avanti, in condizione di superficie pianeggiante la sfera fa contatto con la vite anteriore (più bassa); nella salita invece il tubo si inclina e la pallina scenderà sino a toccare il contatto posteriore inviando un impulso alla centralina. 20
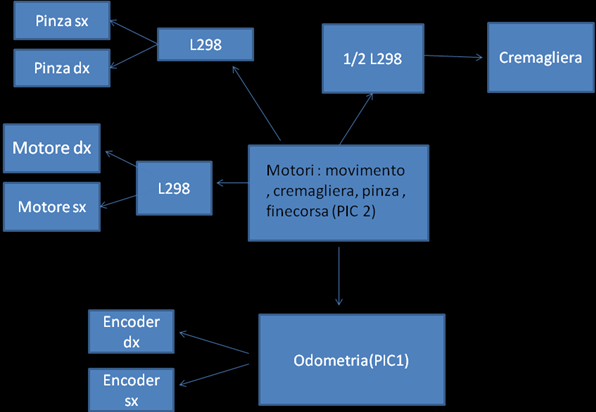
21 CAP. 5 UNITÀ DI CONTROLLO (Indicare l unità (o le unità) centrale adottata, precisando se si tratta di un kit o di una soluzione auto costruita. In questo caso indicare in apposita figura numerata e commentata, lo schema elettrico. Indicare in ogni caso i dati tecnici di cui si dispone, come ad esempio l alimentazione, il firmware necessario, eventuali requisiti, le modalità di interfaccia con il PC ecc. CONTROLLO PINZE: La scheda è gestita da un PIC16f876 che ricevendo il consenso dalla scheda madre di avvenuto ritrovo della lattina argentata, manda tutti i dati alla scheda che controlla i motori, in modo tale da far chiudere le pinze e sollevare la lattina e successivamente la scheda madre gli darà il consenso di depositarla nell'apposito luogo. Schema Controllo Braccio: 21
22 Cablaggio controllo braccio: ELETTRONICA: Il sistema è basato sulla suddivisione dei compiti all'interno del robot in modo tale da eseguire più operazioni in parallelo. É gestito da una scheda madre che controlla tutte le altre ogni qualvolta si presenta un evento o semplicemente modificare uno stato del robot. Il sistema è composto principalmente da una scheda che controlla i due motori che permettono l'avanzamento del robot e altri tre motori per muovere la pinza, un'altra scheda che permette di seguire la linea nera tracciata sul terreno, una terza per gestire tutti i movimenti della pinza, un'altra per condizionare tutti i segnali provenienti dai sensori ed visualizzarli in un display LCD, ed infine una scheda madre che controlla e gestisce il sistema. 22
23 SCHEDA MADRE: E' provvista di un microcontrollore avanzato tipo PIC16f877A a 40 pin. Il suo compito è controllare tutti i sensori al fine di ricostruire l'ambiente esterno al robot e agire di conseguenza. Schema elettrico scheda madre: Cablaggio scheda madre: 23
24 Schema scheda segnali: LINEA NERA: La scheda, anch'essa dotata d un microcontrollore tipo PIC16f876, legge i segnali provenienti dai 5 sensori di linea installati sotto il robot per seguire la linea nera, ed in base all'algoritmo caricato all'interno del PIC16f876, comunica al driver motori come muovere i due motori che permettono la locomozione del robot in modo tale da far seguire correttamente la linea nera descritta sul terreno. 24
25 Schema linea nera schema: Cablaggio linea nera schema: 25
26 DRIVER MOTORI: I motori sono controllati tramite un sistema PID. La scheda è dotata di un microcontrollore PIC16f876 che leggendo i segnali provenienti dai due encoder, installati sulle ruote del robot, controlla tramite due ponti H tutti i motori del robot. È provvista di un ingresso seriale tipo RS-232 che tramite questa porta, la scheda madre, gli comunica con che velocità o di quanti gradi si deve girare ogni singola ruota motrice. 26
27 CAP. 6 SENSORI (Descrivere i sensori impiegati, il loro collegamento con l unità centrale, nel caso si tratti di sensori auto costruiti o sono stati significativamente modificati, allegare lo schema elettrico ed una breve descrizione. Se la natura meccanica del sensore è rilevante, aggiungere disegni cad o foto.) Nel nostro robot abbiamo utilizzato sensori acquistati già pronti all uso, questi percepiscono la differenza tra il colore bianco ed il colore nero fino a 10 mm. La piccola centralina che li gestisce è fatta su di un circuito stampato, contenente un pic dedicato. CONDIZIONAMENTO SEGNALI: Tutti i segnali grezzi provenienti dai sensori arrivano in questa scheda per essere condizionati in modo tale da poter ricavare un'informazione utile al sistema. Il robot è provvisto di 21 sensori di cui: tre sensori di distanza con tecnologia ad ultrasuoni; una barriera a raggio infrarosso; un sensore di riflessione IR per rilevare la lattina; cinque mini sensori di riflessione per leggere la linea nera sul terreno; un inclinometro per rilevare la rampa; quattro sensori di contatto, due anteriori e due posteriori per effettuare l'allineamento con il muro; un sensore di tocco per rilevare le stanze che ha oltrepassato; due encoder, realizzati con un disco per encoder con 180 suddivisioni ed un micro sensore di riflessione; un sensore di fine corsa per la pinza ed infine due sensori di contatto a lamelle per rilevare i dossi. 27
28 CAP. 7 ATTUATORI (Descrivere gli attuatori impiegati, il loro collegamento con l unità centrale, nel caso si tratti di azionamenti auto costruiti allegare lo schema elettrico ed una breve descrizione. Nel caso gli azionamenti non siano stati documentati nella sezione relativa alla meccanica, inserire foto o disegni CAD.) Abbiamo due motori per il movimento del robot, due motori per il movimento della pinza e un motore per la cremagliera. Schema driver motori: 28
29 Cablaggio Driver Motori: 29
30 CAP. 8 AMBIENTE DI SVILUPPO (Descrivere l ambiente di sviluppo impiegato ed il linguaggio di programmazione, precisandone la versione. Spiegare la motivazione della scelta.) Tutti i programmi di controllo, dei motori, dei sensori e del controllo del movimento sono stati fatti in linguaggio c utilizzando un ambiente di sviluppo adatto ai microcontrollori della microchip della microsoft. 30
31 CAP. 9 IL PROGRAMMA SOFTWARE (Descrivere il software originale prodotto per implementare il robot (o i robot se più di uno). Per i linguaggi grafici si possono inserire le immagini di sezioni del programma.) Il programma del robot è stato concepito seguendo uno schema logico di Programmazione dinamica. Il programma è stato concepito per far si che la manutenzione di ogni singolo modulo (Oppure comunemente conosciuta come funzione) sia veloce e che la realizzazione risulti ottimale per debugging e taratura dei valori. L'ambiente di sviluppo è MBLAB con un linguaggio di programmazione derivato dall' ANSI C: l'hi TECH C. Il programma, principalmente, può essere suddiviso in tre parti: stanza inferiore, salita e stanza superiore. La funzione di movimento sfrutta la modulazione del segnale in PWM, cioè, tramite modulo CCP del PIC, possiamo generare delle onde quadre. La stanza inferiore possiede una funzione di seguilinea con tre sensori di luce centrali e due agli estremi anteriori di Provvidenza e delle funzioni che raddrizzano l'andamento del robot stesso. La funzione della salita viene avviata quando l'inclinometro manda 1 logico al PIC di controllo sensori e aspetta che finisce la salita, quindi che il segnale dal piedino dell'inclinometro torni 0. La terza funzione consiste nel trarre in salvo la vittima tramite una funzione di ricerca sul campo sfruttando il sensore ad ultrasuoni, prelevare la vittima ed alzarla tramite la pinza anteriore e portarla nel punto di salvataggio. Qui sotto è presente uno stralcio di codice del PIC che si occupa di seguire la linea: void main (void){ Setup(); 31
32 while(1){ while(en_linea){ valore=ssx<<4 + SX<<3 + C<<2 + DX<<1 + DDX; switch(valore){ case 0b : centro Avanti(100); break; //linea al sinistra del centrale sinistra del centrale destra del centro destra del centrale dx case 0b : //linea a Sinistra(100); break; case 0b : //linea super Sinistra(100); break; case 0b : //linea a Destra(100); break; case 0b : // linea super Destra(100); break; case 0b : //linea a 90 Gira90dx(100); break; 32
33 dx ROBOCUP JR ITALIA 2012 Riva del Garda (TN) aprile case 0b : //linea a 90 Gira90dx(100); break; case 0b : //linea 90 sx Gira90sx(100); break; Dir1=0; Dir2=0; } } } } case 0b : //linea 90 sx Gira90sx(100); break; Qui, tramite dei switch case e l'unione delle condizioni attuali dei sensori in una variabile del PIC, possiamo scegliere che funzione dobbiamo avviare per eseguire la giusta manovra e selezionare il verso del motore. Qui sotto abbiamo una funzione di manovra in particolare: void Avanti(float velocita){ Dir1=1; Dir2=1; velocita=velocita*1.5; CCPR1L=(char)velocita; CCPR2L=(char)velocita; } 33
34 CAP. 10 SORGENTE DI ALIMENTAZIONE (Precisare la o le fonti di alimentazione del robot, indicandone tensione nominale e (se nota) carica nominale.) ALIMENTAZIONE: Il sistema è alimentato da una batteria LI-PO da 14,8V 2200mA/h collegata ad un alimentatore stabilizzato in grado di ottenere in uscita la tensione per i motori, 12V per quelli motrici e 6V per i restanti e la tensione per la logica di 5V. 34
35 35
36 INDICE P.5 - CAP. 1 - DATI GENERALI P.6 - CAP. 2 - DATI DI CONTESTO E MOTIVAZIONE P.10 - CAP. 3 NOME E STRUTTURA DEL ROBOT P.13 - CAP. 4 - MECCANICA P.21 - CAP. 5 UNITÀ DI CONTROLLO P.27 - CAP. 6 - SENSORI P.28 - CAP. 7 - ATTUATORI P.30 - CAP. 8 AMBIENTE DI SVILUPPO P.31 - CAP. 9 IL PROGRAMMA SOFTWARE P.34 - CAP. 10 SORGENTE DI ALIMENTAZIONE 36
ROBOCUP JR ITALIA RIVA DEL GARDA
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA RIVA DEL GARDA 2012 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra : Manetti Istituto: ISIT Alessandro Manetti Grosseto autori MANETTI PARTECIPA
IT ARCHIMEDE di Catania. Prima squadra di RESCUE. Report di DOCUMENTAZIONE
 IT ARCHIMEDE di Catania Prima squadra di RESCUE Report di DOCUMENTAZIONE 1 - DATI GENERALI Nome della squadra: UNCLE PETER Docente responsabile: Pietro Arcidiacono Alunni che compongono la squadra: 1)
IT ARCHIMEDE di Catania Prima squadra di RESCUE Report di DOCUMENTAZIONE 1 - DATI GENERALI Nome della squadra: UNCLE PETER Docente responsabile: Pietro Arcidiacono Alunni che compongono la squadra: 1)
ROBOCUP JUNIOR. CATANIA, Aprile SenigalliaRobot. A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni
 ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
ROBOCUP JUNIOR CATANIA, 14-16 Aprile 2011-04- 06 SenigalliaRobot A cura di: Mazzanti Matteo Stefanini Alessandro Simone Giovanni Liceo E. Medi Senigallia INDICE CAP.1 indicazione dei componenti della squadra,
CHI SIAMO.
 CHI SIAMO La Rete di scuole per la Robocup Jr ITALIA è nata nel novembre 2008 come espressione dell Autonomia scolastica (D.P.R. 275/99) che prevede che le scuole statali possano operare sinergicamente
CHI SIAMO La Rete di scuole per la Robocup Jr ITALIA è nata nel novembre 2008 come espressione dell Autonomia scolastica (D.P.R. 275/99) che prevede che le scuole statali possano operare sinergicamente
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA
 PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: ROBOTICA") PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
PROGRAMMAZIONE COORDINATA TEMPORALMENTE DISCIPLINA: Quarta Monte ore annuo 99 ore di cui 66 di laboratorio Libro di Testo Materiale didattico fornito dal docente. SETTEMBRE abilità/competen ze Richiami
LABORATORI DI CULTURA DIGITALE: INFORMATICA, INTERNET E ROBOTICA
 Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
Dipartimento di Ingegneria Informatica Automatica e Gestionale Università di Roma La Sapienza Via Ariosto 25, Roma Corso di formazione INPS Valore P.A. 2016/17 LABORATORI DI CULTURA DIGITALE: DIRETTORE
Automazione per porte scorrevoli pedonali Portata 140 Kg max - uso intensivo
 K140 Automazione per porte scorrevoli pedonali Portata 140 Kg max - uso intensivo Alta qualità dei materiali e soluzioni tecnologiche innovative in un automatismo compatto, preassemblato e dai minimi ingombri.
K140 Automazione per porte scorrevoli pedonali Portata 140 Kg max - uso intensivo Alta qualità dei materiali e soluzioni tecnologiche innovative in un automatismo compatto, preassemblato e dai minimi ingombri.
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra TEAM Istituto ITIS V.Volterra San Donà di Piave (VE) La Rete di scuole
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra THE ENDLESS RUNNER Istituto ITT G. Chilesotti La Rete di scuole per
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra THE ENDLESS RUNNER Istituto ITT G. Chilesotti La Rete di scuole per
A1.2 - Utilizzare programmi applicativi per il monitoraggio ed il collaudo di sistemi elettronici.
 Programma effettivamente svolto Sez.D COMPETENZE (da linee guida DPR 15/03/2010, art. 8 comma 3 e direttiva 4 del 16 gennaio 2012) K1 - utilizzare la strumentazione di laboratorio e di settore e applicare
Programma effettivamente svolto Sez.D COMPETENZE (da linee guida DPR 15/03/2010, art. 8 comma 3 e direttiva 4 del 16 gennaio 2012) K1 - utilizzare la strumentazione di laboratorio e di settore e applicare
Rete di scuole per la
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2011 Catania 14-16 aprile della squadra DANCE dell Istituto ITIS G.B.Pininfarina di Moncalieri (Torino) ROBOCUP JR ITALIA 2011 - Catania 14-16
Tecnologie dei Sistemi di Automazione e Controllo
 Tecnologie dei Sistemi di Automazione e Controllo Prof. Gianmaria De Tommasi Lezione 8 I Controllori a Logica Programmabile Corso di Laurea Codice insegnamento Email docente Anno accademico N39 N46 M61
Tecnologie dei Sistemi di Automazione e Controllo Prof. Gianmaria De Tommasi Lezione 8 I Controllori a Logica Programmabile Corso di Laurea Codice insegnamento Email docente Anno accademico N39 N46 M61
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra Beta Ray 2 (Alpha Ray) Team Istituto Antonio Tambosi ROBOCUP JR ITALIA
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
FIRST LEGO LEAGUE ITALIA MILANO 6-7 marzo Squadra FLL4: LICEO ROSMINI RELAZIONE TECNICA. TITOLO DEL PROGETTO: ipec
 FIRST LEGO LEAGUE ITALIA MILANO 6-7 marzo 2015 Squadra FLL4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Using the right senses Remote Communication/
FIRST LEGO LEAGUE ITALIA MILANO 6-7 marzo 2015 Squadra FLL4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Using the right senses Remote Communication/
DISPOSITIVO DI SICUREZZA ANTISCHIACCIAMENTO PER MACCHINE AGRICOLE
 DISPOSITIVO DI SICUREZZA ANTISCHIACCIAMENTO PER MACCHINE AGRICOLE Il dispositivo rende automatica l' operazione di inserimento del roll-bar sulle macchine agricole. Tale operazione in precedenza era realizzata
DISPOSITIVO DI SICUREZZA ANTISCHIACCIAMENTO PER MACCHINE AGRICOLE Il dispositivo rende automatica l' operazione di inserimento del roll-bar sulle macchine agricole. Tale operazione in precedenza era realizzata
COLD ECH. Componenti automazione Automation components Composants automation Componentes automatización
 COLD ECH Componenti automazione Automation components Composants automation Componentes automatización COLD ECH 2 COMPONENTI AUTOMAZIONE COLD ECH LIGHT 145 Binario automatico della serie 145 studiato per
COLD ECH Componenti automazione Automation components Composants automation Componentes automatización COLD ECH 2 COMPONENTI AUTOMAZIONE COLD ECH LIGHT 145 Binario automatico della serie 145 studiato per
Grande festa della robotica all'iti "Monaco" di Cosenza!
 Grande festa della robotica all'iti "Monaco" di Cosenza! Il 1 Aprile scorso si sono svolte nel nostro Istituto le selezioni territoriali, per il Sud Italia, della rete di robotica 'Robocup Junior', relativamente
Grande festa della robotica all'iti "Monaco" di Cosenza! Il 1 Aprile scorso si sono svolte nel nostro Istituto le selezioni territoriali, per il Sud Italia, della rete di robotica 'Robocup Junior', relativamente
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA. TITOLO DEL PROGETTO: ipec
 FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
FIRST LEGO LEAGUE ITALIA BOLZANO 14 febbraio 2015 Squadra FLL 4: LICEO ROSMINI RELAZIONE TECNICA TITOLO DEL PROGETTO: ipec MISSIONI Opening Doors Community Learning Robotis Competition Using the right
Scheda prodotto. Banco di flussaggio. Descrizione:
 Descrizione: Scheda prodotto Banco di flussaggio Il banco prova in oggetto è destinato alle prove di flussaggio d aria attraverso le valvole motore, in modalità aspirazione e scarico, di motori endotermici.
Descrizione: Scheda prodotto Banco di flussaggio Il banco prova in oggetto è destinato alle prove di flussaggio d aria attraverso le valvole motore, in modalità aspirazione e scarico, di motori endotermici.
I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di. elaborazione e gestione, hanno un profondo impatto su prodotti di larga
 CAPITOLO 1 INTRODUZIONE AI SENSORI IN FIBRA OTTICA 1.1 La sensoristica 1.1.1. Generalità I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di elaborazione e gestione, hanno un profondo
CAPITOLO 1 INTRODUZIONE AI SENSORI IN FIBRA OTTICA 1.1 La sensoristica 1.1.1. Generalità I sensori, in quanto interfaccia tra l ambiente esterno e i sistemi di elaborazione e gestione, hanno un profondo
Seguendo alla lettera le istruzioni del presente manuale l automazione funzionerà perfettamente senza dare problemi.
 SPAZIO INNOVAZIONI Srl Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza
SPAZIO INNOVAZIONI Srl Via Martiri delle Foibe, 2/1 35010 Vigonza PD P.IVA 04489910283 Sede operativa: Via Roma, 92 35010 Limena PD Tel. 049 2956552 - Fax 049 7969561 info@easygate.eu Centro Assistenza
ISTITUTO ISTRUZIONE SUPERIORE G. Vallauri FOSSANO (CN) DIPARTIMENTO di MECCANICA. Descrizione e finalità
 DIPARTIMENTO di MECCANICA. Descrizione e finalità") Descrizione e finalità Autonomous Guenda Vall è un veicolo robotizzato in grado di muoversi e monitorare l ambiente circostante in modalità autonoma oppure telecontrollata con la finalità di esplorare
Descrizione e finalità Autonomous Guenda Vall è un veicolo robotizzato in grado di muoversi e monitorare l ambiente circostante in modalità autonoma oppure telecontrollata con la finalità di esplorare
ROBOCUP JR ITALIA 2015
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2015 MALPENSA FIERE (VA), 8-11 aprile Squadra... Istituto... Classe... Gara... UNDER 14 Indice Premessa...3 1. Dati generali...5 2. Contesto e
Introduzione alla robotica
 LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
LICEO Scientifico LICEO Scientifico Tecnologico LICEO delle Scienze Umane ITIS (Meccanica, Meccatronica e Energia- Elettronica ed Elettrotecnica Informatica e Telecomunicazioni) ITIS Serale (Meccanica,
UNIVERSITA DEGLI STUDI DI BRESCIA
 UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
In questo nuovo fascicolo ZAKINPROGRESS COMPONENTI
 F.19-ZAKinPROGRESS 13-02-2008 16:58 Pagina 7 7 I L S E T T A G G I O D E I S E R V O ID Con le istruzioni presenti nelle prossime pagine vedrai come settare gli ID numerici dei servomotori. Per questa
F.19-ZAKinPROGRESS 13-02-2008 16:58 Pagina 7 7 I L S E T T A G G I O D E I S E R V O ID Con le istruzioni presenti nelle prossime pagine vedrai come settare gli ID numerici dei servomotori. Per questa
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra e-team_1 I.T.I.S. M.L. Cassata Gubbio (PG) ROBOCUP JR ITALIA 2012
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile REPORT DI DOCUMENTAZIONE Della squadra e-team_1 I.T.I.S. M.L. Cassata Gubbio (PG) ROBOCUP JR ITALIA 2012
ELETTRONICA ED ELETTROTECNICA
 ELETTRONICA ED ELETTROTECNICA Profilo in uscita Il Diplomato in Elettronica ed Elettrotecnica è in grado di intervenire nella progettazione, nella costruzione e nel collaudo di sistemi elettrici ed elettronici,
ELETTRONICA ED ELETTROTECNICA Profilo in uscita Il Diplomato in Elettronica ed Elettrotecnica è in grado di intervenire nella progettazione, nella costruzione e nel collaudo di sistemi elettrici ed elettronici,
Meccanica e Macchine esame 2008 MECCANICA APPLICATA E MACCHINE A FLUIDO
 Meccanica e Macchine esame 008 MECCANICA APPLICATA E MACCHINE A FLUIDO Sessione ordinaria 008 Lo schema riportato in figura rappresenta un motore elettrico che eroga una potenza nominale di 0 kw ad un
Meccanica e Macchine esame 008 MECCANICA APPLICATA E MACCHINE A FLUIDO Sessione ordinaria 008 Lo schema riportato in figura rappresenta un motore elettrico che eroga una potenza nominale di 0 kw ad un
Copyright Arteco Motion Tech S.p.A. 2003
 Modulo I/O seriale - manuale Copyright Arteco Motion Tech S.p.A. 2003 Le informazioni contenute in questo manuale sono di proprietà di Arteco Motion Tech SpA e non possono essere riprodotte né pubblicate
Modulo I/O seriale - manuale Copyright Arteco Motion Tech S.p.A. 2003 Le informazioni contenute in questo manuale sono di proprietà di Arteco Motion Tech SpA e non possono essere riprodotte né pubblicate
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra G.N.S. Squad Istituto Galileo Galilei TN 1 2 autori G.N.S. Squad PARTECIPA ALLA GARA DI Rescue
KNX Hotel Sistema di regolazione alberghiera Guida all installazione (per applicazioni con camere dotate di regolazione aggiuntiva di temperatura)
") KNX Hotel Guida all installazione KNX Hotel Sistema di regolazione alberghiera Guida all installazione (per applicazioni con camere dotate di regolazione aggiuntiva di temperatura) Building Technologies
KNX Hotel Guida all installazione KNX Hotel Sistema di regolazione alberghiera Guida all installazione (per applicazioni con camere dotate di regolazione aggiuntiva di temperatura) Building Technologies
Codice Descrizione u.m. Prezzo %m.d'o.
 L.20 IMPIANTI A PANNELLI FOTOVOLTAICI L.20.10 PANNELLI E INVERTER L.20.10.10 Pannello fotovoltaico in silicio policristallino, fornito e posto in opera, composto da celle monocristallino collegate in serie,
L.20 IMPIANTI A PANNELLI FOTOVOLTAICI L.20.10 PANNELLI E INVERTER L.20.10.10 Pannello fotovoltaico in silicio policristallino, fornito e posto in opera, composto da celle monocristallino collegate in serie,
Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola
 Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola Anatomia del nostro robot Daniele Grosso (1) 1. Dipartimento
Fisica, tecnologia, scienze applicate: ulab2, un laboratorio portatile basato su arduino e due piccoli robot, LEMU e MOMOLAB, vanno a scuola Anatomia del nostro robot Daniele Grosso (1) 1. Dipartimento
I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti!
 I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti! Pawel Jakub KOWALEWSKI IV a Elettronica & Telecomunicazioni 1 Robot 5 Minuti con kit Lego NXT MINDSTORMS
I.T.T.S. "Cerulli" GIULIANOVA -TE- Laboratorio di Robotica Educativa Tutorial Robot in... 5 minuti! Pawel Jakub KOWALEWSKI IV a Elettronica & Telecomunicazioni 1 Robot 5 Minuti con kit Lego NXT MINDSTORMS
ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE. Indirizzo: Elettronica e Telecomunicazioni. Tema di Sistemi Elettronici Automatici TRACCIA 2
 ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Indirizzo: Elettronica e Telecomunicazioni Tema di stemi Elettronici Automatici TRACCIA 2 Quest anno la traccia ministeriale è stata suddivisa in due temi,
ESAME DI STATO DI ISTITUTO TECNICO INDUSTRIALE Indirizzo: Elettronica e Telecomunicazioni Tema di stemi Elettronici Automatici TRACCIA 2 Quest anno la traccia ministeriale è stata suddivisa in due temi,
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Fondamenti di Meccanica Esame del
 Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Automation for swing gates with leaves up to 3 m Kg
 IT JET Automation for swing gates with leaves up to 3 m - 600 Kg Jet Automazione per cancelli a battente Dimensione max anta 3 m - 600 kg 1. DESIGN E TECNOLOGIA Progettato per valorizzare ogni tipo di
IT JET Automation for swing gates with leaves up to 3 m - 600 Kg Jet Automazione per cancelli a battente Dimensione max anta 3 m - 600 kg 1. DESIGN E TECNOLOGIA Progettato per valorizzare ogni tipo di
SERRANDA DI REGOLAZIONE
 GENERALITA' CARATTERISTICHE TECNICHE GENERALITA' : La nuova gamma di produzione di serrande di controllo dei condotti quadri e rettangolari della serie WM, realizza con il modello, uno degli strumenti
GENERALITA' CARATTERISTICHE TECNICHE GENERALITA' : La nuova gamma di produzione di serrande di controllo dei condotti quadri e rettangolari della serie WM, realizza con il modello, uno degli strumenti
Classe III specializzazione elettronica. Sistemi automatici
 Macro unità n 1 Classe III specializzazione elettronica Sistemi automatici Reti elettriche Reti elettriche in regime continuo. Generatore, resistori, legge di Ohm. Resistenze in serie e parallelo. Partitore
Macro unità n 1 Classe III specializzazione elettronica Sistemi automatici Reti elettriche Reti elettriche in regime continuo. Generatore, resistori, legge di Ohm. Resistenze in serie e parallelo. Partitore
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5. PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA
 ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
ISTITUTO DI ISTRUZIONE SUPERIORE J.C. MAXWELL Data: 24 /9 /2016 Pag. 1di 5 INDIRIZZO SCOLASTICO DISCIPLINA DOCENTE / I CLASSE / I PROGRAMMAZIONE ANNUALE A.S. 2016/ 2017 MECCANICA e MECCATRONICA X MANUTENZIONE
DICTATROLLEY DECELERATORI IDRAULICI DI VELOCITA REGOLABILI (BREVETTATO)
") DICTATROLLEY DECELERATORI IDRAULICI DI VELOCITA REGOLABILI (BREVETTATO) 3.16 I Dicta Trolley sono dei deceleratori lineari di velocità, concepiti per l applicazione a grandi masse lavoranti per corse lunghe.
DICTATROLLEY DECELERATORI IDRAULICI DI VELOCITA REGOLABILI (BREVETTATO) 3.16 I Dicta Trolley sono dei deceleratori lineari di velocità, concepiti per l applicazione a grandi masse lavoranti per corse lunghe.
Descrivere principio
 Docente: LASEN SERGIO Classe: 5MAT Materia: Tecnologie Elettrico Elettroniche, Automazione e Applicazioni MODULO 1 - MACCHINE ELETTRICHE ASINCRONE sistemi trifase. Descrivere il principio di un m.a.t.
Docente: LASEN SERGIO Classe: 5MAT Materia: Tecnologie Elettrico Elettroniche, Automazione e Applicazioni MODULO 1 - MACCHINE ELETTRICHE ASINCRONE sistemi trifase. Descrivere il principio di un m.a.t.
MAXIMA
 Maxima Elettroserrature di alta sicurezza motorizzate Catenaccio basculante con blocco meccanico antitaglio Azionamento manuale con cilindro europeo Versione con gancio per porte scorrevoli Elettronica
Maxima Elettroserrature di alta sicurezza motorizzate Catenaccio basculante con blocco meccanico antitaglio Azionamento manuale con cilindro europeo Versione con gancio per porte scorrevoli Elettronica
VIVERE IN UN CLIMA IDEALE VALVOLE EQUIPERCENTUALI VALVOLE DI REGOLAZIONE A GLOBO A 3 VIE GUIDA. Installazione
 VIVERE IN UN CLIMA IDEALE VALVOLE EQUIPERCENTUALI VALVOLE DI REGOLAZIONE A GLOBO A 3 VIE Installazione GUIDA GUIDA VALVOLE EQUIPERCENTUALI VALVOLE DI REGOLAZIONE A GLOBO A 3 VIE pag. 3 4 5 6 7 8 9 INDICE
VIVERE IN UN CLIMA IDEALE VALVOLE EQUIPERCENTUALI VALVOLE DI REGOLAZIONE A GLOBO A 3 VIE Installazione GUIDA GUIDA VALVOLE EQUIPERCENTUALI VALVOLE DI REGOLAZIONE A GLOBO A 3 VIE pag. 3 4 5 6 7 8 9 INDICE
Smontaggio. 3 Togliere la gomma di protezione dei cavi. 4 Svitare la vite (3) e dividere l interruttore interno in 3 parti ((4), (5) e (6)).
 e dividere l interruttore interno in 3 parti ((4), (5) e (6)).") 0 0 Utensili particolari Punte Torx con foro guida centrale 0 necessari Disco d estrazione 0 Punte Torx TX0 00 Cacciavite TX0 00 Importante! Prima di iniziare una qualunque operazione di manutenzione,
0 0 Utensili particolari Punte Torx con foro guida centrale 0 necessari Disco d estrazione 0 Punte Torx TX0 00 Cacciavite TX0 00 Importante! Prima di iniziare una qualunque operazione di manutenzione,
Inseguitore Solare. ITIS E. Mattei Sondrio, Introduzione:
 Inseguitore Solare ITIS E. Mattei Sondrio, 2008 Introduzione: Si è voluto realizzare a scopo didattico un modellino di inseguitore solare che ha le seguenti caratteristiche: Assi Motori Circuiti Pannelli
Inseguitore Solare ITIS E. Mattei Sondrio, 2008 Introduzione: Si è voluto realizzare a scopo didattico un modellino di inseguitore solare che ha le seguenti caratteristiche: Assi Motori Circuiti Pannelli
CANCELLI SCORREVOLI. www.came.com
 CANCELLI SCORREVOLI 64 www.came.com 66 Guida alla scelta 68 Bx 70 Bk 72 By-3500T 74 DIMENSIONI QUADRI COMANDO 75 FUNZIONI ELETTRONICHE CANCELLI SCORREVOLI 65 Guida alla scelta Automazioni per cancelli
CANCELLI SCORREVOLI 64 www.came.com 66 Guida alla scelta 68 Bx 70 Bk 72 By-3500T 74 DIMENSIONI QUADRI COMANDO 75 FUNZIONI ELETTRONICHE CANCELLI SCORREVOLI 65 Guida alla scelta Automazioni per cancelli
Manuale di Installazione per Kit di automazione per cancelli ad anta battente
 Manuale di Installazione per Kit di automazione per cancelli ad anta battente SOMMARIO Diagramma e scheda tecnica...pag. 2 Lista delle parti....pag. 3 Esempio di installazione standard.. pag. 3 Guida all
Manuale di Installazione per Kit di automazione per cancelli ad anta battente SOMMARIO Diagramma e scheda tecnica...pag. 2 Lista delle parti....pag. 3 Esempio di installazione standard.. pag. 3 Guida all
Cilindro compatto guidato Generalità
 Generalità Serie 6 Connessioni di alimentazione superiori Fori per il montaggio del cilindro dall'alto Cave porta sensore Connessioni di alimentazione laterali Fori filettati per il montaggio del cilindro
Generalità Serie 6 Connessioni di alimentazione superiori Fori per il montaggio del cilindro dall'alto Cave porta sensore Connessioni di alimentazione laterali Fori filettati per il montaggio del cilindro
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: luigi.biagiotti@unimore.it
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: luigi.biagiotti@unimore.it
BRACCI TELESCOPICI VERTICALI INFORMAZIONI GENERALI
 BRACCI TELESCOPICI VERTICALI I bracci telescopici sono stati progettati e costruiti per essere installati su vie di corsa, per muoversi all interno di un area di lavoro, per annullare gli effetti generati
BRACCI TELESCOPICI VERTICALI I bracci telescopici sono stati progettati e costruiti per essere installati su vie di corsa, per muoversi all interno di un area di lavoro, per annullare gli effetti generati
INSEGUITORE SOLARE CON ARDUINO. Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3.
 INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
INSEGUITORE SOLARE CON ARDUINO Dispositivo che insegue il movimento solare realizzato con: 1. Arduino 2. 2 foto resistenze 3. 1 servomotore 1 PRINCIPIO DI FUNZIONAMENTO Le due fotoresistenze devono essere
- OLIMPIADI DI PROBLEM SOLVING - Informatica e pensiero algoritmico nella scuola dell'obbligo
 Ministero dell Istruzione, dell Università e della Ricerca Dipartimento per il sistema educativo di istruzione e formazione Direzione generale per gli ordinamenti scolastici e la valutazione del sistema
Ministero dell Istruzione, dell Università e della Ricerca Dipartimento per il sistema educativo di istruzione e formazione Direzione generale per gli ordinamenti scolastici e la valutazione del sistema
Istruzioni di Installazione. Lista delle Parti. Harley Davidson modelli V-Rod L iniezione DEVE essere. all installazione
 Lista delle Parti Harley Davidson modelli V-Rod 08-11 Istruzioni di Installazione 1 Power Commander 1 Cavo USB 1 CD-Rom 1 Guida Installazione 2 Adesivi Power Commander 2 Adesivi Dynojet 2 Striscia di Velcro
Lista delle Parti Harley Davidson modelli V-Rod 08-11 Istruzioni di Installazione 1 Power Commander 1 Cavo USB 1 CD-Rom 1 Guida Installazione 2 Adesivi Power Commander 2 Adesivi Dynojet 2 Striscia di Velcro
Corso ITS Tecnico superiore per l automazione ed i sistemi meccatronici
 Tecnico superiore per l automazione ed i sistemi meccatronici Destinato a giovani diplomati (Istituti Tecnici, Istituti Professionali, Licei) Integra competenze nel campo della meccanica, dell elettrotecnica,
Tecnico superiore per l automazione ed i sistemi meccatronici Destinato a giovani diplomati (Istituti Tecnici, Istituti Professionali, Licei) Integra competenze nel campo della meccanica, dell elettrotecnica,
KART (C8) CARENATURE:
 CARENATURE:") KART (C8) DEFINIZIONE: Sono ammessi nella categoria 8 Kart, i veicoli kart il cui telaio deriva strettamente dai kart a motore, che dispongono di una omologazione da parte della Federazione Internazionale
KART (C8) DEFINIZIONE: Sono ammessi nella categoria 8 Kart, i veicoli kart il cui telaio deriva strettamente dai kart a motore, che dispongono di una omologazione da parte della Federazione Internazionale
Camar Elettronica s.r.l. Via Mulini Esterna n CARPI (Modena) ITALY
 ITALY") CM88-23OPTO Microprocessore con 23 ingressi digitali optoisolati Il CM88-23OPTO è uno strumento a microprocessore multicanale che accetta 23 ingressi digitali. La logica di funzionamento dello strumento
CM88-23OPTO Microprocessore con 23 ingressi digitali optoisolati Il CM88-23OPTO è uno strumento a microprocessore multicanale che accetta 23 ingressi digitali. La logica di funzionamento dello strumento
Possibili accessori. Avvertenze:
 Lince Italia SpA Azienda con sistema di gestione per la qualità certificato REG. N. 4796 UNI EN ISO 9001:2000 Vers. 170507030707 Rev 2 MANUALE DI ISTALLAZIONE PROGRAMMAZIONE ED USO Art 1660 forza di sollevamento
Lince Italia SpA Azienda con sistema di gestione per la qualità certificato REG. N. 4796 UNI EN ISO 9001:2000 Vers. 170507030707 Rev 2 MANUALE DI ISTALLAZIONE PROGRAMMAZIONE ED USO Art 1660 forza di sollevamento
MANUALE D USO DELLA SCHEDA DI CONTROLLO APM 2020
 MANUALE D USO DELLA SCHEDA DI CONTROLLO APM 2020 La scheda APM 2020 è stata progettata in modo da velocizzare l installazione e l operatività dell intero sistema e da migliorarne ancora di più l affidabilità.
MANUALE D USO DELLA SCHEDA DI CONTROLLO APM 2020 La scheda APM 2020 è stata progettata in modo da velocizzare l installazione e l operatività dell intero sistema e da migliorarne ancora di più l affidabilità.
La qualità di esecuzione dell impianto è legata alla professionalità delle attrezzature utilizzate: con Sistem Air ogni strumento offre semplicità di
 La qualità di esecuzione dell impianto è legata alla professionalità delle attrezzature utilizzate: con Sistem Air ogni strumento offre semplicità di utilizzo e assicura un risultato altamente professionale.
La qualità di esecuzione dell impianto è legata alla professionalità delle attrezzature utilizzate: con Sistem Air ogni strumento offre semplicità di utilizzo e assicura un risultato altamente professionale.
DINAMOMETRI E ACCESSORI
 DINAMOMETRI E ACCESSORI Visualizza il video dello strumento SERIE AFG Questi modelli consentono misurazioni ad altissima precisione, sia in trazione che in compressione. L elettronica a tecnologia avanzata
DINAMOMETRI E ACCESSORI Visualizza il video dello strumento SERIE AFG Questi modelli consentono misurazioni ad altissima precisione, sia in trazione che in compressione. L elettronica a tecnologia avanzata
Esercitazioni Corso Automazione a fluido ESERCITAZIONE N4
 ESERCITAZIONE N4 Realizzare lo schema pneumatico di figura 1 comandato mediante azionamento elettrico secondo lo schema di figura 2. In questo schema si realizza la sequenza D+/D-C+/D+/D- C-. Dello schema
ESERCITAZIONE N4 Realizzare lo schema pneumatico di figura 1 comandato mediante azionamento elettrico secondo lo schema di figura 2. In questo schema si realizza la sequenza D+/D-C+/D+/D- C-. Dello schema
LINEAR MODULI E LINEAR SLITTE
 LINEAR MODULI E LINEAR SLITTE 2 Indice Guide Lineari Motorizzabi Serie GD - - M pag. 4 Momenti Statici e Carichi Limite pag. 6 Guide Lineari Motorizzabili Serie IL - - M pag. 7 Momenti Statici e Carichi
LINEAR MODULI E LINEAR SLITTE 2 Indice Guide Lineari Motorizzabi Serie GD - - M pag. 4 Momenti Statici e Carichi Limite pag. 6 Guide Lineari Motorizzabili Serie IL - - M pag. 7 Momenti Statici e Carichi
FRANCESCO MARINO - TELECOMUNICAZIONI
 Classe: Data Autore: Francesco Marino http://www.francescomarino.net info@francescomarino.net Esercitazione n. 12 Installazione e configurazione di un modem in banda fonica (Windows 9x) Gruppo: Alunni
Classe: Data Autore: Francesco Marino http://www.francescomarino.net info@francescomarino.net Esercitazione n. 12 Installazione e configurazione di un modem in banda fonica (Windows 9x) Gruppo: Alunni
Sistemi per la gestione professionale di un kartodromo a noleggio
 Sistemi per la gestione professionale di un kartodromo a noleggio info@evo21.it www.evo21.it EVO 21 Lite EVO 21 Lite Schema base Radio Crono Radio Crono Radio Crono Quadro elettrico di controllo Detection
Sistemi per la gestione professionale di un kartodromo a noleggio info@evo21.it www.evo21.it EVO 21 Lite EVO 21 Lite Schema base Radio Crono Radio Crono Radio Crono Quadro elettrico di controllo Detection
PINZE A TRE DITA SERIE CHT PINZE PNEUMATICHE PARALLELE A TRE DITA CON GUIDA SCORREVOLE CON FORZA DI SERRAGGIO FINO A 1035 N
 SERIE CHT PINZE PNEUMATICHE PARALLELE A TRE DITA CON GUIDA SCORREVOLE CON FORZA DI SERRAGGIO FINO A 1035 N Kip3.pdf Edizione 12-00 Caratteristiche Modello leggero Corpo in alluminio ad alta resistenza
SERIE CHT PINZE PNEUMATICHE PARALLELE A TRE DITA CON GUIDA SCORREVOLE CON FORZA DI SERRAGGIO FINO A 1035 N Kip3.pdf Edizione 12-00 Caratteristiche Modello leggero Corpo in alluminio ad alta resistenza
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
Sensori di Prossimità Guida Utente
 Sensori di Prossimità Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 NORME DI INSTALLAZIONE... 2 2.1 Precauzioni... 2 2.2 Connessione elettrica... 3 3 SETTAGGIO DEI CANALI CON ACQUISITORI GET... 3 4 CARATTERISTICHE
Sensori di Prossimità Guida Utente 1 INDICE: 1 INTRODUZIONE... 2 2 NORME DI INSTALLAZIONE... 2 2.1 Precauzioni... 2 2.2 Connessione elettrica... 3 3 SETTAGGIO DEI CANALI CON ACQUISITORI GET... 3 4 CARATTERISTICHE
SCHEDA PRODOTTO NDA LIRA DIGITAL Interfaccia digitale di un inverter trifase per New Decors Art Srl
 Modello Codice SCHEDA PRODOTTO NDA LIRA DIGITAL Interfaccia digitale di un inverter trifase per New Decors Art Srl NDA LIRA DIGITAL Note sulle Specifiche Tecniche Il prodotto NDA LIRA DIGITAL è una centralina
Modello Codice SCHEDA PRODOTTO NDA LIRA DIGITAL Interfaccia digitale di un inverter trifase per New Decors Art Srl NDA LIRA DIGITAL Note sulle Specifiche Tecniche Il prodotto NDA LIRA DIGITAL è una centralina
MODULO PREREQUISITI OBIETTIVI CONTENUTI ORE
 1 ELETTRONICA DIGITALE Conoscenze di fisica del primo biennio biennio Nozioni di base di elettrotecnica ed elettronica analogica Uso di internet per ricerca materiali e cataloghi. Logica combinatoria Concetto
1 ELETTRONICA DIGITALE Conoscenze di fisica del primo biennio biennio Nozioni di base di elettrotecnica ed elettronica analogica Uso di internet per ricerca materiali e cataloghi. Logica combinatoria Concetto
OvO automation for sectional doors up to 9 m2
 IT Ovo Automation for sectional doors up to 9 m 2 Ovo Automazione per porte sezionali fino a 9 m 2 1. PER PORTE SEZIONALI FINO A 9 m 2 MOVIMENTO FLUIDO ELETTRONICA AFFIDABILE Ovo è la nuova automazione
IT Ovo Automation for sectional doors up to 9 m 2 Ovo Automazione per porte sezionali fino a 9 m 2 1. PER PORTE SEZIONALI FINO A 9 m 2 MOVIMENTO FLUIDO ELETTRONICA AFFIDABILE Ovo è la nuova automazione
MATERIALI PER LA DISCUSSIONE
 SETTORE TECNOLOGICO MATERIALI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE TELECOMUNICAZIONI INFORMATICA E TELECOMUNICAZIONI ESITI DI APPRENDIMENTO Regolamento, Art. 5 comma 1 Nota: Le Competenze,
SETTORE TECNOLOGICO MATERIALI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE TELECOMUNICAZIONI INFORMATICA E TELECOMUNICAZIONI ESITI DI APPRENDIMENTO Regolamento, Art. 5 comma 1 Nota: Le Competenze,
DIP SWITCH 1-4 LED 2 LED 1. SW1 pulsante di programmazione SEQUENZA DI PROGRAMMAZIONE MODALITÀ FUNZIONAMENTO SCHEDA
 MODALITÀ FUNZIONAMENTO SCHEDA SWITCH 1-4 LED 2 LED 1 SW1 pulsante di programmazione Nota: questo è il modo in cui si vedono i con la morsettiera posizionata in alto. Quando il piccolo interruttore bianco
MODALITÀ FUNZIONAMENTO SCHEDA SWITCH 1-4 LED 2 LED 1 SW1 pulsante di programmazione Nota: questo è il modo in cui si vedono i con la morsettiera posizionata in alto. Quando il piccolo interruttore bianco
tecnologie ecosostenibili applicate INVERTER HTG 30 MP
 INVERTER HTG 30 MP L inverter HTG30 MP è un inverter/caricabatteria ad alta frequenza progettato per soddisfare tutte le esigenze che il mercato STORAGE per impianti fotovoltaici oggi giorno richiede.
INVERTER HTG 30 MP L inverter HTG30 MP è un inverter/caricabatteria ad alta frequenza progettato per soddisfare tutte le esigenze che il mercato STORAGE per impianti fotovoltaici oggi giorno richiede.
PIANO DI LAVORO ANNUALE DELLA DISCIPLINA. Classe 3 ATI A.S. 2015/2016
 Istituto di Istruzione Secondaria Superiore Ettore Majorana 24068 SERIATE (BG) Via Partigiani 1 Tel 035 297612 Fax 035301672 Cod. Mecc. BGISO1700A Cod.Fisc. 95028420164 Md CDC 49_1 - Piano di Lavoro Annuale
Istituto di Istruzione Secondaria Superiore Ettore Majorana 24068 SERIATE (BG) Via Partigiani 1 Tel 035 297612 Fax 035301672 Cod. Mecc. BGISO1700A Cod.Fisc. 95028420164 Md CDC 49_1 - Piano di Lavoro Annuale
Anno scolastico Materia Classe TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI
 Anno scolastico Materia Classe 2013-2014 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI 3 a 4 a B ITIS 1 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI... 2 2 Classe 3 a
Anno scolastico Materia Classe 2013-2014 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI 3 a 4 a B ITIS 1 TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI... 2 2 Classe 3 a
IST-1395.CS01.01/A CE395CS / Istruzioni d uso Pag. 2/6
 IT IST-1395.CS01.01/A File: IST-1395.CS01.01-A_CE395CS-IT_Convertitore RS232-RS422.docx CONVERTITORE SERIALE RS232-RS485 CE395CS ISTRUZIONI D USO TECNOCONTROL S.r.l. Via Miglioli, 4720090 SEGRATE (MI)
IT IST-1395.CS01.01/A File: IST-1395.CS01.01-A_CE395CS-IT_Convertitore RS232-RS422.docx CONVERTITORE SERIALE RS232-RS485 CE395CS ISTRUZIONI D USO TECNOCONTROL S.r.l. Via Miglioli, 4720090 SEGRATE (MI)
INDICE. 1. Caratteristiche tecniche 4
 INDICE 1. Caratteristiche tecniche 4 1.1 Modulo KITPTTECH 4 1.1.1 Funzionalità 4 1.1.2 Dati tecnici 4 1.1.3 Ingressi e uscite 5 1.1.4 Consumi 5 1.1.5 Condizioni di esercizio 5 2. Installazione 6 2.1 Fissaggio
INDICE 1. Caratteristiche tecniche 4 1.1 Modulo KITPTTECH 4 1.1.1 Funzionalità 4 1.1.2 Dati tecnici 4 1.1.3 Ingressi e uscite 5 1.1.4 Consumi 5 1.1.5 Condizioni di esercizio 5 2. Installazione 6 2.1 Fissaggio
AREA DI PROGETTO: RIDUTTORE MECCANICO INDIRIZZO: MECCANICA
 Anno scolastico 2013-2014 AREA DI PROGETTO: RIDUTTORE MECCANICO CLASSE: 5 A Meccanica INDIRIZZO: MECCANICA COORDINATRICE AREA DI PROGETTO: Prof.ssa Di Bartolomeo Ornella Pagina 1 di 6 L obiettivo dell
Anno scolastico 2013-2014 AREA DI PROGETTO: RIDUTTORE MECCANICO CLASSE: 5 A Meccanica INDIRIZZO: MECCANICA COORDINATRICE AREA DI PROGETTO: Prof.ssa Di Bartolomeo Ornella Pagina 1 di 6 L obiettivo dell
ROBOCUP JR ITALIA 2012
 Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra: Team LMT Istituto: I.T.I.S A.Rossi ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
Rete di scuole per la ROBOCUP JR ITALIA ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile Della squadra: Team LMT Istituto: I.T.I.S A.Rossi ROBOCUP JR ITALIA 2012 Riva del Garda (TN) 19-21 aprile
EcoRemote SISTEMA DI GESTIONE DI UNA STAZIONE DI MONITORAGGIO DELLA QUALITÀ DELL ARIA. Ingegneria dei sistemi
 Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Hardware, software e periferiche. Facoltà di Lettere e Filosofia anno accademico 2008/2009 secondo semestre
 Hardware, software e periferiche Facoltà di Lettere e Filosofia anno accademico 2008/2009 secondo semestre Riepilogo - Concetti di base dell informatica L'informatica è quel settore scientifico disciplinare
Hardware, software e periferiche Facoltà di Lettere e Filosofia anno accademico 2008/2009 secondo semestre Riepilogo - Concetti di base dell informatica L'informatica è quel settore scientifico disciplinare
Competenze di ambito Prerequisiti Abilità / Capacità Conoscenze Livelli di competenza
 Docente: LASEN SERGIO Classe: 3MAT Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE_STRUTTURA E COMPONENTI Saper effettuare
Docente: LASEN SERGIO Classe: 3MAT Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE_STRUTTURA E COMPONENTI Saper effettuare
with leaves up to 4.2 m Kg
 IT MODUS Automation for swing gates with leaves up to 4.2 m - 500 Kg Automazione per cancelli a battente Dimensione max anta 4,2 m - 500 kg 1. PRESTAZIONI BREVETTATE Grazie alla sua meccanica brevettata,
IT MODUS Automation for swing gates with leaves up to 4.2 m - 500 Kg Automazione per cancelli a battente Dimensione max anta 4,2 m - 500 kg 1. PRESTAZIONI BREVETTATE Grazie alla sua meccanica brevettata,
PSPR Pesa Statica Portatile per Rotabili
 PSPR (), è un innovativo sistema di misura, totalmente portatile, progettato per misurare la distribuzione dei pesi scaricati sul binario da ciascuna ruota di un rotabile ferroviario. È in grado, infatti,
PSPR (), è un innovativo sistema di misura, totalmente portatile, progettato per misurare la distribuzione dei pesi scaricati sul binario da ciascuna ruota di un rotabile ferroviario. È in grado, infatti,
DESCRIZIONE TECNICA SISTEMA LUMINOSOLARE
 DESCRIZIONE TECNICA SISTEMA LUMINOSOLARE versione 2017_01 Descrizione del sistema Luminosolare. E un sistema fotovoltaico che utilizza l energia solare prodotta da moduli FV per alimentare lampade votive
DESCRIZIONE TECNICA SISTEMA LUMINOSOLARE versione 2017_01 Descrizione del sistema Luminosolare. E un sistema fotovoltaico che utilizza l energia solare prodotta da moduli FV per alimentare lampade votive
Porte automatiche scorrevoli FACE
 Porte automatiche scorrevoli FACE con motore Brushless in presa diretta ed alimentazione a range esteso 100-240 V (50/60 Hz) Tecnologia Switch Mode la prima vera automazione energy saving che garantisce
Porte automatiche scorrevoli FACE con motore Brushless in presa diretta ed alimentazione a range esteso 100-240 V (50/60 Hz) Tecnologia Switch Mode la prima vera automazione energy saving che garantisce
obiettivi tempi aree didattiche
 LABORATORI DI ROBOTICA EDUCATIVA Istituti di Istruzione Superiore obiettivi consolidamento del pensiero logico fondamentali della robotica learning by doing stimolo delle attitudini tecniche e creative
LABORATORI DI ROBOTICA EDUCATIVA Istituti di Istruzione Superiore obiettivi consolidamento del pensiero logico fondamentali della robotica learning by doing stimolo delle attitudini tecniche e creative
2009 Yamaha R1. Lista delle Parti
 Lista delle Parti 2009 Yamaha R1 Istruzioni di Installazione 1 Power Commander 1 Cavo USB 1 CD-ROM 1 Guida Installazione 2 Adesivi Power Commander 2 Adesivi Dynojet 2 Striscia di Velcro 1 Salvietta con
Lista delle Parti 2009 Yamaha R1 Istruzioni di Installazione 1 Power Commander 1 Cavo USB 1 CD-ROM 1 Guida Installazione 2 Adesivi Power Commander 2 Adesivi Dynojet 2 Striscia di Velcro 1 Salvietta con
Macchina per fasciare di Franco Fissore
 Macchina per fasciare di Franco Fissore L idea di realizzare una cosi splendida macchina è nata dal mio carissimo amico Cosentino, lui elabora il prototipo con funzionamento manuale, ed io elaboro il suo
Macchina per fasciare di Franco Fissore L idea di realizzare una cosi splendida macchina è nata dal mio carissimo amico Cosentino, lui elabora il prototipo con funzionamento manuale, ed io elaboro il suo
Programma di Robotica[LEGO EV3]
![Programma di Robotica[LEGO EV3]](/thumbs/39/19338690.jpg "Programma di Robotica[LEGO EV3]") Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
TLZ MODULI LINEARI MOTORIZZABILI
 TLZ MODULI LINEARI MOTORIZZABILI www.faitgroup.it La famiglia di prodotti TLZ è stata progettata ricercando elevate prestazioni, qualità e semplicità costruttiva. Vengono utilizzati estrusi in alluminio
TLZ MODULI LINEARI MOTORIZZABILI www.faitgroup.it La famiglia di prodotti TLZ è stata progettata ricercando elevate prestazioni, qualità e semplicità costruttiva. Vengono utilizzati estrusi in alluminio
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI)
") ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: DISCIPLINA: Tecnologie e Progettazione di Sistemi Informatici e di Telecomunicazioni- pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE
ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: DISCIPLINA: Tecnologie e Progettazione di Sistemi Informatici e di Telecomunicazioni- pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE
LE ALTRE BOARD ARDUINO
 LE ALTRE BOARD ARDUINO Nel corso degli anni la scheda Arduino si è evoluta. Dalla versione Diecimila alla versione Uno sono state apportate diverse migliorie. L ultima release della Board Uno, la REV3,
LE ALTRE BOARD ARDUINO Nel corso degli anni la scheda Arduino si è evoluta. Dalla versione Diecimila alla versione Uno sono state apportate diverse migliorie. L ultima release della Board Uno, la REV3,
UNIVERSITÀ DEGLI STUDI DI BRESCIA
 UNIVERSITÀ DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Prima
UNIVERSITÀ DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Prima
Digital Voltmeter and Ammeter. Parsic Italia. Strumenti digitali low cost per applicazioni generali
 Strumenti digitali low cost per applicazioni generali Collegamenti elettrici - Voltmetri DC Voltmetri Il voltmetro è uno strumento per la misura della differenza di potenziale elettrico tra due punti di
Strumenti digitali low cost per applicazioni generali Collegamenti elettrici - Voltmetri DC Voltmetri Il voltmetro è uno strumento per la misura della differenza di potenziale elettrico tra due punti di