Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica. Fondamenti di controllo dei robot
|
|
|
- Dorotea Valli
- 5 anni fa
- Visualizzazioni
Transcript
1 Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di controllo dei robot
2 Modulo B. Fondamenti di controllo dei Robot Controllo del moto di un giunto: Il controllo PID Controllo del moto di un manipolatore Pianificazione delle traiettorie Controllo del moto nello spazio dei giunti Controllo del moto nello spazio operativo: cinematica differenziale e Jacobiano Dexter Arm: Meccanica, Cinematica, Controllo, Interfacce software
3 Sistema di controllo Un sistema di controllo fornisce un comando in tensione o in corrente agli attuatori (motori) in modo da far assumere ai giunti una configurazione desiderata

4 Schema di una unità di controllo Posizione Unità di controllo Motore Encoder a Segnale di riferimento Riduttore mot + mot - amplificatore di potenza GIUNTO Alimentazione
5 Schema di una unità di controllo Motore Encoder Riduttore mot + a A tensioni in ingresso al motore di segno opposto corrispondono rotazioni opposte del motore mot - GIUNTO
6 Schema di una unità di controllo Encoder: sensore che misura la rotazione dei giunti in valore relativo o assoluto. La misurazione avviene in tacche di encoder Riduttore: meccanismo che riduce i giri dell asse montato sul giunto rispetto ai giri del motore (es. riduzione 1:N) Amplificatore di potenza: amplifica un segnale di riferimento in un segnale di potenza per muovere il motore Unità di controllo: unità che produce un segnale di riferimento per il motore Motore GIUNTO Encoder a Riduttore Posizione Unità di controllo Segnale di riferimento amplificatore di potenza Alimentazione
7 Relazione tra posizione del giunto e posizione encoder θ: posizione giunto in gradi q: posizione giunto in tacche di encoder N: rapporto di riduzione del motore R: risoluzione dell encoder (numero di tacche per giro) θ = x 360 q R x N
8 Controllo del moto di un giunto Obiettivo: muovere il giunto dalla posizione attuale θ i (espressa in gradi) alla posizione desiderata θ f in un intervallo di tempo t : θ i θ f q i q f θ i q i θ f q f
9 Controllo ad anello chiuso (feedback control) La variabile da controllare è misurata e confrontata con il valore desiderato la differenza, o errore, è elaborata secondo un algoritmo prefissato il risultato di quest'elaborazione costituisce il valore d'ingresso dell'attuatore Valore desiderato + err Algoritmo di controllo V Attuatore - posizione attuale Sensore
10 Controllo PID (Proporzionale, Integrativo e Derivativo): E un sistema di controllo ad anello chiuso in cui l'errore è processato con un algoritmo di tipo Proporzionale, Integrativo e derivativo. Quest'algoritmo è composto di tre parti: proporzionale, così detta perché il suo effetto è proporzionale all'errore; Integrativa, perché produce in uscita una correzione che rappresenta l'integrale dell'errore nel tempo; Derivativa perché genera una correzione che è funzione della derivata prima dell'errore. Non tutti i sistemi di controllo ad anello chiuso fanno uso di un algoritmo di tipo P.I.D.
11 Controllo PID (Proporzionale, Integrativo e Derivativo): In un controllo PID l errore è dato in ingresso al sistema di controllo il quale calcola le componenti derivativa e integrale e il segnale di uscita V Valore desiderato + - e PID V Attuatore posizione attuale Sensore
12 Controllo PID (Proporzionale, Integrativo e derivativo): V e e& q q = K e + K e& + K p q d q i = = q d de dt q q ( t) dt K p è il guadagno o costante proporzionale K i è il guadagno o costante integrale K d è il guadagno o costante derivativa e rappresenta l errore, ovvero la differenza tra posizione desiderata e la posizione attuale e q
13 Controllo PID Componente Proporzionale La tensione V imposta al motore è proporzionale alla differenza tra la posizione effettiva misurata dal sensore e la posizione desiderata + q d posizione desiderata - e K * err V Motore Robot q a (posizione attuale) Encoder
14 Controllo PID Componente Proporzionale: La tensione imposta al motore nell unità di tempo è proporzionale alla differenza tra la posizione effettiva misurata dal sensore e la posizione voluta V = K p e q e qp = q d q K P costante proporzionale
15 Controllo PID Posizione desiderata: 1 Componente Proporzionale: comportamento del sistema Il motore oscilla prima di convergere verso la posizione desiderata Il sistema si assesta senza annullare l errore
16 Controllo PID Componente derivativa: e& = p q de dt qp Derivata dell errore nel tempo V = K e + K e& p q d q K d costante derivativa e qp = q d q
17 Controllo PID Controllo Proporzionale e Derivativo: Riduzione delle oscillazioni Diminuzione del tempo di assestamento Il sistema si assesta senza annullare l errore
18 Controllo PID Componente integrativa: K i e q ( t)dt Integrazione dell errore nel tempo V = K e + K e ( t)dt p q i q e qp = q d q K i costante integrativa
19 Controllo PID Controllo Proporzionale e Integrativo: Il sistema si assesta annullando l errore
20 Controllo PID Controllo Proporzionale, Derivativo e Integrativo V = K e + K e& + K p q d q i e e& qp p q = = q d de dt q q e q ( t) dt
21 Controllo PID Controllo Proporzionale, Derivativo e Integrativo: Le costanti K p, K d, K i vengono determinate in modo empirico o con metodi specifici
22 Controllo del moto di un manipolatore Obiettivo del controllo del moto di un manipolatore è muovere il braccio da una posizione iniziale ad una posizione finale espresse nelle coordinate dello spazio operativo In generale, il problema del controllo del moto di un manipolatore consiste nel determinare l andamento delle forze o coppie che gli attuatori devono applicare ai giunti in modo da garantire l esecuzione di una traiettoria pianificata
23 Controllo del moto di un manipolatore Nel controllo del moto di un manipolatore si individuano le seguenti problematiche: Cinematica Cinematica differenziale e statica Dinamica Pianificazione di treiettorie Controllo del moto Controllo dell interazione
24 Pianificazione di traiettorie OBIETTIVO: generare gli ingressi di riferimento per il sistema di controllo del moto per muovere il braccio da x start --> x f PERCORSO: luogo dei punti dello spazio dei giunti o dello spazio operativo che il manipolatore deve descrivere nell esecuzione del movimento assegnato TRAIETTORIA: percorso su cui è specificata la legge oraria di moto (velocità ed accelerazione in ogni punto)
25 Pianificazione di traiettorie OBIETTIVO: generare gli ingressi di riferimento per il sistema di controllo del moto: x start --> x f DATI IN INPUT: definizione del percorso vincoli del percorso vincoli dovuti alla dinamica del manipolatore DATI IN OUTPUT: nello spazio dei giunti: traiettorie dei vari giunti nello spazio operativo: traiettoria dell organo terminale
26
27 Pianificazione di traiettorie L algoritmo di pianificazione deve in generale soddisfare i seguenti requisiti: Le traiettorie generate devono rendere minima una opportuna funzione peso Le posizionie le velocitàdeigiuntisiano funzioni continue del tempo Siano minimizzati effetti indesiderati (e.g. traiettorie a curvatura non regolare)
28 Controllo del moto di un manipolatore Il controllo del moto può essere realizzato nello spazio dei giunti spazio operativo
29 Controllo del moto nello spazio dei giunti Muovere il braccio da x i ax d espresse nello spazio operativo del robot senza interessarsi alla traiettoria percorsa dall organo terminale del braccio Si determina la posizione finale del braccio nello spazio dei giunti q f tramite la cinematica inversa q d = K -1 (x d ) Si muovono i giunti dalla posizione attuale q i alla posizione desiderata q d

30 Controllo del moto nello spazio dei giunti L inversione cinematica viene effettuata al di fuori del ciclo di controllo
31 Controllo del moto nello spazio dei giunti Nell effettuazione del movimento l organo terminale del manipolatore esegue nello spazio operativo un percorso non prevedibile, a causa degli effetti non lineari introdotti dalla cinematica diretta
32 Traiettorie nello spazio dei giunti Moto punto-punto: il manipolatore deve muoversi da una configurazione iniziale delle variabili di giunto ad una finale in un intervallo di tempo fissato t f. Per imporre la legge di moto su un giunto si possono scegliere funzioni polinomiali. Polinomio cubico: consente di imporre i valori iniziale q i e finale q f delle variabili di giunto e le velocità iniziale e finale (generalmente nulle). Polinomio di quinto grado: consente di imporre i valori iniziale q i e finale q f delle variabili di giunto, le velocità iniziale e finale e il valore dell accelerazione iniziale e finale.
33 Controllo del moto di un giunto Profilo di velocità trapezoidale Presenta una accelerazione costante nella fase di partenza, una velocità di crociera e una decelerazione costante nella fase di arrivo. La traiettoria corrispondente è di tipo polinomiale misto: un tratto lineare raccordato con due tratti parabolici nell intorno delle posizioni iniziale e finale.
34 Profilo di velocità trapezoidale Posizione Velocità NB: velocità ed accelerazioni all istante finale ed iniziale possono essere diverse da zero Accelerazione
35 x d Kin -1 Controllo del moto nello spazio dei giunti Il pianificatore delle traiettorie stabilisce per ogni giunto la traiettoria di movimento in accordo alla legge utilizzata Il movimento viene eseguito tramite il controllo PID q d Pianificatore. {q(t),q(t)} Controllo Attuatori q a Encoder
36 Controllo del moto nello spazio operativo Nell effettuazione del movimento da x i a x d l organo terminale del manipolatore esegue nello spazio operativo un traiettoria in accordo ad una legge prestabilita Es. traiettoria lineare o curvilinea
37 Traiettorie nello spazio operativo L algoritmo di pianificazione di traiettoria nello spazio operativo genera la legge di moto dell organo terminale, secondo un percorso di caratteristiche geometriche definite nello spazio operativo. Il risultato di una pianificazione è una. sequenza di n-uple: (t, p(t),, Φ(t), p(t), ω(t))

38 Controllo del moto nello spazio operativo L inversione cinematica viene effettuata all interno del ciclo di controllo
39 Controllo del moto nello spazio operativo Il pianificatore delle traiettorie stabilisce per ogni giunto la traiettoria di movimento in accordo alla legge utilizzata Il movimento viene eseguito dal controllore x d. Pianif. {t, p(t), Φ(t), p(t), ω(t))} Controllo Attuatori x i Kin q a Encoder
40 Controllo del moto nello spazio operativo Il problema del controllo nello spazio operativo richiede in ogni istante la risoluzione di due problemi: 1) Inversione cinematica per convertire le specifiche di moto espresse nello spazio operativo in specifiche di moto nello spazio dei giunti 2) Sistema di controllo nello spazio dei giunti in grado di garantire l inseguimento dei riferimenti ottenuti al punto 1)
41 Controllo del moto nello spazio operativo far eseguire al manipolatore. la treiettoria pianificata (t, p(t), Φ(t), p(t), ω(t)) determinare velocità e accelerazioni dei giunti nel tempo per raggiungere la posizione finale desiderata espressa nelle coordinate cartesiane (calcolo dello Jacobiano) determinare tensioni e correnti da applicare ai motori per far assumere ai giunti velocità e accelerazioni calcolate dallo Jacobiano
42 Cinematica differenziale Determinazione della relazione tra le velocità dei giunti e le corrispondenti velocità angolari e lineari dell organo terminale. Tali legami sono descritti da una matrice di trasformazione (Jacobiano) dipendente dalla configurazione del manipolatore.
43 Cinematica differenziale Jacobiano geometrico = matrice di trasformazione dipendente dalla configurazione corrente del braccio v p& = ω = J ( q)q&. J(q) = Jacobiano geometrico p = velocità dell effettore finale ω = velocità. di rotazione dell effettore finale q = velocità ai giunti
44 Cinematica differenziale Determinare le velocità ai giunti data la velocità nello spazio operativo p& v = = J ( q)q& ω p& = 1 q& J ( q) ω J -1 è l inversa dello Jacobiano Metodi di integrazione numerica consentono di ricavare il vettore q dal vettore delle velocità ai giunti
45 Singolarità cinematiche Le configurazioni che causano una diminuzione di rango della matrice Jacobiana J sono dette singolarità cinematiche. In corrispondenza delle singolarità: a) si ha una perdita di mobilità della struttura b) possono esistere infinite soluzioni al problema cinematico inverso c) velocità ridotte nello spazio operativo possono causare velocità molto elevate nello spazio dei giunti
46 Controllo del moto nello spazio operativo Pianificatore delle traiettorie p(t ) p f p(t) J -1 (q(t)) q(t) Velocità ai giunti p i Posizione nello spazio operativo nel tempo t. Velocità dell effettore finale nel tempo (t,p(t),, Φ(t), p(t), ω(t)) t Velocità dei giunti nel tempo J -1. (q(t)) (t, q(t)) t
47 Controllo del moto nello spazio operativo Posizione desiderata (da Pianif.) x(t+dt) + -. (x,ω) Jacobiano Cinematica inversa.. q = J -1 (q(t)) (x,ω) q.. q(t+dt) = f(q(t),q(t)) q(t+dt) Cinematica diretta x(t)=k(q(t)) PID q(t) Robot
48 Performance di un manipolatore industriale Payload: massimo carico sollevabile Velocità: velocità massima di movimento nello spazio operativo Accuratezza: scostamento tra la posizione calcolata sulla base dei parametri di targa dal sistema di controllo e la posizione reale Ripetibilità: misura della capacità del manipolatore di tornare in una posizione precedentemente assunta (funzione del sistema e degli algoritmi di controllo, oltre che delle caratteristiche meccaniche del robot).

49 KUKA KR 15/2 Dof: 6 Payload: 15 kg Max. reach: 1570 mm Repeatability: <± 0.1 mm Weight: 222 kg

50 Il manipolatore PUMA 560 Dof: 6 Payload: 2 kg Velocità dell effettore: 1.0 m/s Ripetibilità: <± 0.1 mm Peso: 120 lb
51 Dexter Arm Cable actuated d.o.f.: 8 Workspace: 1200 mm x 350 Repeatability: + 1mm Velocity: 0.2 m/s Payload: 2 Kg Weight: 40 Kg
52 Manus Cable actuated d.o.f.: 6 Velocity: 0.2 m/s Payload: 2 Kg Power: 24V DC Weight: 12 Kg

53 DLR Arm
54 The Dexter Arm
55 The Dexter Arm Workspace: 1200 mm x 350 Repeatability: + 1mm Velocity: 0.2 m/s Payload: 2 Kg D.o.f.: 8 Power: 24V DC Weight: 40 Kg
56 The Dexter Arm 8-d.o.f. anthropomorphic redundant robot arm, composed of trunk, shoulder, elbow and wrist designed for service applications and personal assistance in residential sites, such as houses or hospitals mechanically coupled structure: the mechanical transmission system is realized with pulleys and steel cables main characteristics: reduced accuracy,lighter mechanical structure, safe and intrinsically compliant structure
57 The Dexter arm Transmission system realized with pulleys and steel cables Joints J0 and J1 are actuated by motors and driving gear-boxes directly connected to the articulation axis Joints J2,..,J7 are actuated by DC-motors installed on link 1
58 Trasmission #6
59 Trasmissions #2-5 and 7
60 Anthropomorphic structure Wrist Elbow Shoulder Trunk
61 Geometric Configuration x 2 x 3 θ 8 θ 3 z 3 x 1 θ 4 x 4 x 5 z 8 θ 1 z 2 θ 5 z 5 θ 6 x 7 z 7 x 6 x 0 z 1 θ 2 z 4 z 6 x 8 z 0 θ 7
62 Denavit-Hartenberg Parameters Joint a i [mm] d i [mm] α i [rad] θ i [rad] π/2 θ π/2 θ π/2 θ π/2 θ π/2 θ π/2 θ π/2 θ θ 8
63 The Dexter Workspace
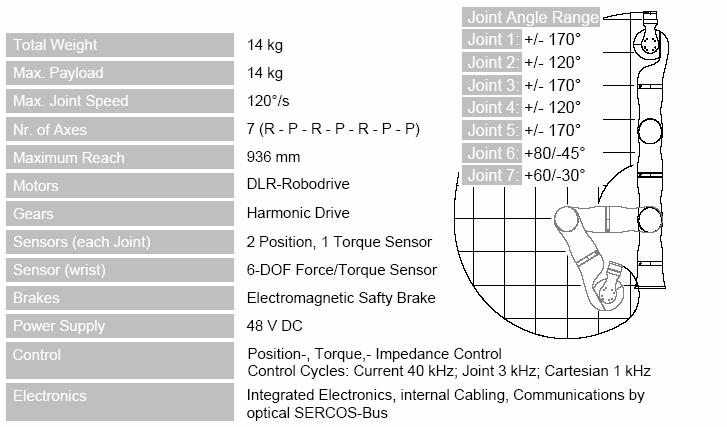
64 Joint Ranges
65 Sistema di controllo PC CPU Controllo Schede Controllo Assi PID Convertitore AD/DA Segnali di riferimento Driver di Potenza Segnali Encoder Tensioni per i motori Dexter (Attuatori e Encoder)
66 Architettura software Libreria dei comandi Arm Controller ARM
67 Interfacce Software bool read_arm_q (double* q) q: puntatore ad un array di 8 double in cui viene restituita la posizione in gradi dei giunti del braccio bool move_arm_q(double* q) q: puntatore ad un array di 8 double contenente la posizione in gradi dei giunti del braccio
68 Interfacce Software bool read_arm_c (double* p) p: puntatore ad un array di 6 double contenenti posizione in mm ed orientamento in gradi del braccio nello spazio cartesiano
69 Interfacce Software bool move_arm_c7(double* p, double elbow, double J0, double velocity) p: puntatore ad un array di 6 double contenenti posizione in mm ed orientamento in gradi nello spazio cartesiano Elbow: angolo del gomito espresso in gradi J0: posizione finale del giunto 0 Velocity: frazione della velocità massima di movimento Inversione cinematica su 7 dof
70 Interfacce Software bool move_arm_c(double* p, double elbow, double velocity) p: puntatore ad un array di 6 double contenenti posizione in mm ed orientamento in gradi nello spazio cartesiano Elbow: angolo del gomito espresso in gradi Velocity: frazione della velocità massima di movimento Inversione cinematica su 8 dof
Modulo D. Fondamenti di Robotica
 Università di Pisa Corso di Laurea Specialistica in Ingegneria Biomedica Corso di Bioingegneria della Riabilitazione Modulo D. Fondamenti di Robotica Fondamenti di controllo dei robot Cecilia Laschi cecilia.laschi@sssup.it
Università di Pisa Corso di Laurea Specialistica in Ingegneria Biomedica Corso di Bioingegneria della Riabilitazione Modulo D. Fondamenti di Robotica Fondamenti di controllo dei robot Cecilia Laschi cecilia.laschi@sssup.it
Corso di Robotica. Università di Pisa Corso di Laurea Magistrale in Informatica. Fondamenti di controllo dei robot
 Università di Pisa Corso di Laurea Magistrale in Informatica Corso di Robotica Fondamenti di controllo dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di controllo dei Robot Controllo
Università di Pisa Corso di Laurea Magistrale in Informatica Corso di Robotica Fondamenti di controllo dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di controllo dei Robot Controllo
Table of contents Introduction. Controllo dei Robot. Pianificazione di traiettorie
 Table of contents Introduction Controllo dei Robot Dipartimento di Ing. Elettrica e dell Informazione (DEI) Politecnico di Bari e-mail: paolo.lino [at] poliba.it Controllo dei Robot L obiettivo della pianificazione
Table of contents Introduction Controllo dei Robot Dipartimento di Ing. Elettrica e dell Informazione (DEI) Politecnico di Bari e-mail: paolo.lino [at] poliba.it Controllo dei Robot L obiettivo della pianificazione
generazione degli ingressi di riferimento per il sistema di controllo del moto
 PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
Prova Scritta di Robotica I
 Esercizio 1 Prova Scritta di Robotica I 8 Gennaio 4 Il robot planare in figura è costituito da due giunti rotatori ed uno prismatico. L P Assegnare le terne di riferimento secondo la convenzione di Denavit-Hartenberg,
Esercizio 1 Prova Scritta di Robotica I 8 Gennaio 4 Il robot planare in figura è costituito da due giunti rotatori ed uno prismatico. L P Assegnare le terne di riferimento secondo la convenzione di Denavit-Hartenberg,
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 3 Dicembre 27 Esercizio Si consideri il robot a due giunti rotatori schematizzato in figura. Utilizzando la notazione di Denavit-Hartenberg, si fornisca l espressione della
Prova Scritta di Robotica I 3 Dicembre 27 Esercizio Si consideri il robot a due giunti rotatori schematizzato in figura. Utilizzando la notazione di Denavit-Hartenberg, si fornisca l espressione della
PIANIFICAZIONE DI TRAIETTORIE
 PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
Cinematica differenziale inversa Statica
 Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
PIANIFICAZIONE DELLE TRAIETTORIE
 PIANIFICAZIONE DELLE TRAIETTORIE Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona 1 11 Introduzione L obiettivo della pianificazione di traiettorie è quello di generare gli ingressi
PIANIFICAZIONE DELLE TRAIETTORIE Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona 1 11 Introduzione L obiettivo della pianificazione di traiettorie è quello di generare gli ingressi
Compito d esame 14/11/2005
 COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 7 Gennaio 8 Esercizio Si consideri il robot planare a tre giunti rotatori nella configurazione mostrata in figura Le lunghezze dei bracci sono l 5, l, l 3 5 [m] Si determini
Prova Scritta di Robotica I 7 Gennaio 8 Esercizio Si consideri il robot planare a tre giunti rotatori nella configurazione mostrata in figura Le lunghezze dei bracci sono l 5, l, l 3 5 [m] Si determini
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 0 Luglio 2009 Esercizio Si consideri il robot planare RP in figura, dove l è la lunghezza del primo braccio e sono indicate le coordinate generalizzate da utilizzare. Sia p
Prova Scritta di Robotica I 0 Luglio 2009 Esercizio Si consideri il robot planare RP in figura, dove l è la lunghezza del primo braccio e sono indicate le coordinate generalizzate da utilizzare. Sia p
Cinematica differenziale
 Corso di Robotica 1 Cinematica differenziale Prof Alessandro De Luca Robotica 1 1 Cinematica differenziale studio dei legami tra moto (velocità) nello spazio dei giunti e moto (velocità lineare e angolare)
Corso di Robotica 1 Cinematica differenziale Prof Alessandro De Luca Robotica 1 1 Cinematica differenziale studio dei legami tra moto (velocità) nello spazio dei giunti e moto (velocità lineare e angolare)
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 5 Marzo 004 Esercizio 1 Si consideri un robot mobile a due ruote ad orientamento fisso (ed una passiva riorientabile e non centrata di appoggio) comandate indipendentemente
Prova Scritta di Robotica I 5 Marzo 004 Esercizio 1 Si consideri un robot mobile a due ruote ad orientamento fisso (ed una passiva riorientabile e non centrata di appoggio) comandate indipendentemente
Pianificazione di traiettorie
 Corso di Robotica 1 Pianificazione di traiettorie Prof. Alessandro De Luca Robotica 1 1 Pianificazione delle traiettorie ORGANI DI GOVERNO NEL ROBOT sensori esterni ambiente task planner* trajectory planner*
Corso di Robotica 1 Pianificazione di traiettorie Prof. Alessandro De Luca Robotica 1 1 Pianificazione delle traiettorie ORGANI DI GOVERNO NEL ROBOT sensori esterni ambiente task planner* trajectory planner*
Robotica I. Test 11 Novembre 2009
 Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
università DEGLI STUDI DI NAPOLI FEDERICO II
 università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE
 51 CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE In questo capitolo vengono presentate le prove sperimentali per l identificazione della coppia dovuta
51 CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE In questo capitolo vengono presentate le prove sperimentali per l identificazione della coppia dovuta
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 11 Settembre 2008 Esercizio Si consideri il manipolatore mobile in figura, costituito da una base mobile su ruote car-like con a bordo un manipolatore 2R planare. Siano: (x,
Prova Scritta di Robotica I 11 Settembre 2008 Esercizio Si consideri il manipolatore mobile in figura, costituito da una base mobile su ruote car-like con a bordo un manipolatore 2R planare. Siano: (x,
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione sicura tra umani
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione sicura tra umani
Robotica I. Test 2 18 Dicembre 2009
 Robotica I Test 8 Dicembre 9 Si consideri il robot con quattro giunti rotatori in Figura. Le terne di Denavit-Hartenberg sono già assegnate, con la terna posta all intersezione tra primo e secondo asse
Robotica I Test 8 Dicembre 9 Si consideri il robot con quattro giunti rotatori in Figura. Le terne di Denavit-Hartenberg sono già assegnate, con la terna posta all intersezione tra primo e secondo asse
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
Prova Scritta di Robotica I 9 Febbraio 2009
 Esercizio Prova Scritta di Robotica I 9 Febbraio 9 Si consideri l estensione al secondo ordine in accelerazione dello schema di controllo cinematico di traiettoria cartesiana. A tale scopo, si assuma che
Esercizio Prova Scritta di Robotica I 9 Febbraio 9 Si consideri l estensione al secondo ordine in accelerazione dello schema di controllo cinematico di traiettoria cartesiana. A tale scopo, si assuma che
Spazio dei giunti e spazio operativo
 CINEMATICA relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale Matrice di rotazione Rappresentazioni dell orientamento Trasformazioni omogenee Cinematica diretta Spazio
CINEMATICA relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale Matrice di rotazione Rappresentazioni dell orientamento Trasformazioni omogenee Cinematica diretta Spazio
Prova Scritta di Robotica II
 Prova Scritta di Robotica II 10 Giugno 009 Esercizio 1 Ricavare l espressione della matrice d inerzia Bq per il robot planare PRP mostrato in figura. Per i = 1,, 3, siano: m i = massa del braccio i; I
Prova Scritta di Robotica II 10 Giugno 009 Esercizio 1 Ricavare l espressione della matrice d inerzia Bq per il robot planare PRP mostrato in figura. Per i = 1,, 3, siano: m i = massa del braccio i; I
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 28 giugno 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 28 giugno 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico per la lucidatura automatica della superficie
Interfaccia aptica a 5 gdl per la riabilitazione degli arti superiori
 www.fisiokinesiterapia.biz Interfaccia aptica a 5 gdl per la riabilitazione degli arti superiori Neuroriabilitazione post-stroke stroke Fase acuta Italia 196.000 Veneto 10.000 Padova 2.200 Fase cronica
www.fisiokinesiterapia.biz Interfaccia aptica a 5 gdl per la riabilitazione degli arti superiori Neuroriabilitazione post-stroke stroke Fase acuta Italia 196.000 Veneto 10.000 Padova 2.200 Fase cronica
Controllo nello spazio dei giunti. Compensazione in avanti a coppia precalcolata. Controllo nello spazio operativo
 CONTROLLO DEL MOTO Controllo nello spazio dei giunti Controllo decentralizzato Compensazione in avanti a coppia precalcolata Controllo centralizzato Controllo nello spazio operativo IL PROBLEMA DEL CONTROLLO
CONTROLLO DEL MOTO Controllo nello spazio dei giunti Controllo decentralizzato Compensazione in avanti a coppia precalcolata Controllo centralizzato Controllo nello spazio operativo IL PROBLEMA DEL CONTROLLO
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il circuito elettronico
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il circuito elettronico
LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale
 LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093024 email: crossi@deis.unibo.it Procedura di sintesi Guida alla sintesi del controllo
LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093024 email: crossi@deis.unibo.it Procedura di sintesi Guida alla sintesi del controllo
Prova Scritta di Robotica I. 12 Gennaio 2005
 Esercizio 1 Prova Scritta di Robotica I 12 Gennaio 2005 Si consideri il robot (un manipolatore su base mobile) in figura, in moto sul piano (x, y) La base mobile è dotata di due ruote fisse poste a distanza
Esercizio 1 Prova Scritta di Robotica I 12 Gennaio 2005 Si consideri il robot (un manipolatore su base mobile) in figura, in moto sul piano (x, y) La base mobile è dotata di due ruote fisse poste a distanza
Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot. Introduzione al corso. Prof. Paolo Rocco
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
ROBOTICA Syllabus Versione 1.0
 ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
ROBOTICA Syllabus Versione 1.0 Modulo Robotica Questo modulo definisce i concetti e le competenze fondamentali relativi ai principi di base di Robotica. Module Goals Chi supera la prova d esame per questo
Robot Mobili su Ruote Generalità e Cinematica
 Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Comportamento Dinamico di Manipolatori Interagenti con l Ambiente
 Comportamento Dinamico di Manipolatori Interagenti con l Ambiente Dottorando: Nicola Pedrocchi Tutor: Prof. Giovanni Legnani Progetto svolto in collaborazione con ITIA-CNR (sede di Milano) ROBOT & INTERAZIONE
Comportamento Dinamico di Manipolatori Interagenti con l Ambiente Dottorando: Nicola Pedrocchi Tutor: Prof. Giovanni Legnani Progetto svolto in collaborazione con ITIA-CNR (sede di Milano) ROBOT & INTERAZIONE
MECCANICA APPLICATA. Esercizi di ALLE MACCHINE I POLITECNICO DI BARI. PhD Student: Ing. Ilario De Vincenzo
 POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
Robot IMI e sistema di controllo industriale basato su OpenDSP. Tutorial
 /12/2002 Robot IMI Tutorial Robot IMI e sistema di controllo industriale basato su OpenDSP Tutorial Nicola SMALDONE /12/2002 Robot IMI Tutorial Il manipolatore planare IMI Comando e resolver Fine corsa
/12/2002 Robot IMI Tutorial Robot IMI e sistema di controllo industriale basato su OpenDSP Tutorial Nicola SMALDONE /12/2002 Robot IMI Tutorial Il manipolatore planare IMI Comando e resolver Fine corsa
SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT
 SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Corso di Robotica 1 Cinematica inversa
 Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 29 gennaio 2018 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema robotico, costituito da un attuatore lineare che integra il
Componenti per la robotica: Sistemi di misura e Sensori propriocettivi
 Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Modellistica dei Manipolatori Industriali 01BTT Esame del 23/11/2001 Soluzione
 Modellistica dei Manipolatori Industriali 1BTT Esame del 23/11/21 Soluzione 1 Sistemi di riferimento e cinematica di posizione In Figura 1 il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali 1BTT Esame del 23/11/21 Soluzione 1 Sistemi di riferimento e cinematica di posizione In Figura 1 il manipolatore è stato ridisegnato per mettere in evidenza variabili
Controllo dei Robot. Corso di Controllo dei Robot Unità di Governo. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Corso di Controllo dei Robot Unità di Governo Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Componenti di un sistema robotico Un sistema robotico è un sistema complesso rappresentato
Corso di Controllo dei Robot Unità di Governo Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Componenti di un sistema robotico Un sistema robotico è un sistema complesso rappresentato
I PARTE Domande a risposta multipla
 10/02/2012 MATRICOLA I PARTE Domande a risposta multipla La valutazione di ogni domanda sarà fatta assegnando alle risposte esatte i punteggi indicati. La valutazione finale sarà in trentesimi è farà media
10/02/2012 MATRICOLA I PARTE Domande a risposta multipla La valutazione di ogni domanda sarà fatta assegnando alle risposte esatte i punteggi indicati. La valutazione finale sarà in trentesimi è farà media
a.a. 2016/2017 Stefano Bifaretti Vincenzo Bonaiuto Dipartimento di Ingegneria Industriale
 a.a. 2016/2017 Stefano Bifaretti Vincenzo Bonaiuto Dipartimento di Ingegneria Industriale Negli azionamenti con comando in velocità il legame dinamico tra la variabile di controllo dell azionamento e la
a.a. 2016/2017 Stefano Bifaretti Vincenzo Bonaiuto Dipartimento di Ingegneria Industriale Negli azionamenti con comando in velocità il legame dinamico tra la variabile di controllo dell azionamento e la
LABORATORIO DI ROBOTICA SCORBOT-ER. Appunti per laboratorio didattico
 LABORATORIO DI ROBOTICA SCORBOT-ER Appunti per laboratorio didattico Claudio Mattoccia Rev. Maggio 1996 Lo SCORBOT-ER è un robot a 5 gradi di libertà fornito di una pinza motorizzata come strumento di
LABORATORIO DI ROBOTICA SCORBOT-ER Appunti per laboratorio didattico Claudio Mattoccia Rev. Maggio 1996 Lo SCORBOT-ER è un robot a 5 gradi di libertà fornito di una pinza motorizzata come strumento di
Prova TIPO C per: ESERCIZIO 1.
 Prova TIPO C per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta multipla (v. ultime
Prova TIPO C per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta multipla (v. ultime
Modellistica dei Manipolatori Industriali 01BTT Esame del 18/02/2002 Soluzione
 Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Laurea Magistrale in Informatica
 Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it Una prima suddivisione: sensori passivi: convertono direttamente l energia dell
Corso di Laurea Magistrale in Informatica Corso di Robotica Sensori per la robotica Cecilia Laschi cecilia.laschi@sssup.it Una prima suddivisione: sensori passivi: convertono direttamente l energia dell
UNITÀ DI GOVERNO. Architettura funzionale. Ambiente di programmazione. Architettura hardware
 UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
Controllo di traiettoria
 Corso di Robotica 2 Controllo di traiettoria Prof. Alessandro De Luca A. De Luca Controllo a dinamica inversa dato il modello dinamico del robot B(q) q + n(q, q ) = u c(q, q ) + g(q) + modelli di attrito
Corso di Robotica 2 Controllo di traiettoria Prof. Alessandro De Luca A. De Luca Controllo a dinamica inversa dato il modello dinamico del robot B(q) q + n(q, q ) = u c(q, q ) + g(q) + modelli di attrito
Esempi di Sistemi di Controllo e prime definizioni. Automatica ROMA TRE Stefano Panzieri- 1
 Esempi di Sistemi di Controllo e prime definizioni Automatica ROMA TRE Stefano Panzieri- 1 Controllo di temperatura T desiderata Sensore di temperatura (termostato) Attuatore (relais) Riscaldatore + acqua
Esempi di Sistemi di Controllo e prime definizioni Automatica ROMA TRE Stefano Panzieri- 1 Controllo di temperatura T desiderata Sensore di temperatura (termostato) Attuatore (relais) Riscaldatore + acqua
Esercizio: pendolo sferico. Soluzione
 Esercizio: pendolo sferico Si consideri un punto materiale di massa m vincolato a muoversi senza attrito sulla superficie di una sfera di raggio R e soggetto alla forza di gravita. Ridurre il moto alle
Esercizio: pendolo sferico Si consideri un punto materiale di massa m vincolato a muoversi senza attrito sulla superficie di una sfera di raggio R e soggetto alla forza di gravita. Ridurre il moto alle
Fisica I - Ing. Sicurezza e Protezione, prof. Schiavi A.A Soluzioni proposte per il Foglio di Esercizi n. 2
 Fisica I - Ing. Sicurezza e Protezione, prof. Schiavi A.A. 2004-2005 Soluzioni proposte per il Foglio di Esercizi n. 2 2.1. Il proiettile ed il sasso cadono lungo y per effetto della accelerazione di gravità
Fisica I - Ing. Sicurezza e Protezione, prof. Schiavi A.A. 2004-2005 Soluzioni proposte per il Foglio di Esercizi n. 2 2.1. Il proiettile ed il sasso cadono lungo y per effetto della accelerazione di gravità
Prova Scritta di Robotica II. 25 Marzo 2004
 Prova Scritta di Robotica II 5 Marzo 004 Si consideri il robot planare RP in figura in moto in un piano verticale Siano: m 1 e m le masse dei due bracci; d 1 la distanza del baricentro del primo braccio
Prova Scritta di Robotica II 5 Marzo 004 Si consideri il robot planare RP in figura in moto in un piano verticale Siano: m 1 e m le masse dei due bracci; d 1 la distanza del baricentro del primo braccio
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo di un Braccio Robotico (Pendolo Reale)
") Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Angolo polare, versori radiale e trasverso
 Angolo polare, versori radiale e trasverso Desideriamo descrivere il moto di un corpo puntiforme che ruota su una circonferenza attorno ad un asse fisso. Nella figura l asse di rotazione coincide con l
Angolo polare, versori radiale e trasverso Desideriamo descrivere il moto di un corpo puntiforme che ruota su una circonferenza attorno ad un asse fisso. Nella figura l asse di rotazione coincide con l
Università degli Studi di Roma Tor Vergata
 Università degli Studi di Roma Tor Vergata CANDIDATO: RELATORE: CORRELATORE: Ing. Daniele Carnevale Ing. Francesco Martinelli ATTUAZIONE DI UN SENSORE AD INFRAROSSI PER LA MAPPATURA DI AMBIENTI E L INSEGUIMENTO
Università degli Studi di Roma Tor Vergata CANDIDATO: RELATORE: CORRELATORE: Ing. Daniele Carnevale Ing. Francesco Martinelli ATTUAZIONE DI UN SENSORE AD INFRAROSSI PER LA MAPPATURA DI AMBIENTI E L INSEGUIMENTO
Sistemi Dinamici. Corrado Santoro
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Definizione di Sistema Un
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Definizione di Sistema Un
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico (ing. M. Troncossi)
") MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
a.a. 2017/2018 Stefano Bifaretti Dipartimento di Ingegneria Industriale
 a.a. 2017/2018 Stefano Bifaretti Dipartimento di Ingegneria Industriale Negli azionamenti con comando in velocità il legame dinamico tra la variabile di controllo dell azionamento e la velocità del motore
a.a. 2017/2018 Stefano Bifaretti Dipartimento di Ingegneria Industriale Negli azionamenti con comando in velocità il legame dinamico tra la variabile di controllo dell azionamento e la velocità del motore
Cinematica e Controllo di un robot mobile
 Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di impedenza
 Corso di Robotica 2 Controllo di impedenza Prof. Alessandro De Luca A. De Luca Controllo di impedenza assegna un comportamento dinamico desiderato all interazione fra end-effector e ambiente le prestazioni
Corso di Robotica 2 Controllo di impedenza Prof. Alessandro De Luca A. De Luca Controllo di impedenza assegna un comportamento dinamico desiderato all interazione fra end-effector e ambiente le prestazioni
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
a.a. 2014/2015 Docente: Stefano Bifaretti
 a.a. 2014/2015 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Un sistema di controllo automatico è un sistema in grado di imporre a una o più variabili controllate (uscite) gli andamenti temporali
a.a. 2014/2015 Docente: Stefano Bifaretti email: bifaretti@ing.uniroma2.it Un sistema di controllo automatico è un sistema in grado di imporre a una o più variabili controllate (uscite) gli andamenti temporali
SPAZIO DI LAVORO. Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona
 SPAZIO DI LAVORO Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona 1 11 Introduzione Equazione Cinematica Diretta Esprime la posizione della terna utensile rispetto alla terna
SPAZIO DI LAVORO Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona 1 11 Introduzione Equazione Cinematica Diretta Esprime la posizione della terna utensile rispetto alla terna
Modello dinamico dei robot:
 Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Sistemi di simulazione cinematica e dinamica per la progettazione meccanica DOTTORATO IN MECCANICA APPLICATA XXI CICLO SECONDO ANNO
 REL. :PERONI PAOLO DOTTORATO XXI CICLO SECONDO ANNO 19/10/07 Sistemi di simulazione cinematica e dinamica per la progettazione meccanica LAVORO SVOLTO SUL SOFTWARE MECAD Proseguendo il lavoro dello scorso
REL. :PERONI PAOLO DOTTORATO XXI CICLO SECONDO ANNO 19/10/07 Sistemi di simulazione cinematica e dinamica per la progettazione meccanica LAVORO SVOLTO SUL SOFTWARE MECAD Proseguendo il lavoro dello scorso
Prova TIPO D per: ESERCIZIO 1.
 Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Azionamenti Elettrici Parte 1 Generazione del moto mediante motori elettrici
 Azionamenti Elettrici Parte Generazione del moto mediante motori elettrici Prof. Alberto Tonielli DEIS - Università di Bologna Tel. 05-6443024 E-mail mail: atonielli@deis deis.unibo.itit Collocazione del
Azionamenti Elettrici Parte Generazione del moto mediante motori elettrici Prof. Alberto Tonielli DEIS - Università di Bologna Tel. 05-6443024 E-mail mail: atonielli@deis deis.unibo.itit Collocazione del
Dinamica del Manipolatore (seconda parte)
") Dinamica del Manipolatore (seconda parte) Ph.D Ing. Michele Folgheraiter Corso di ROBOTICA2 Prof.ssa Giuseppina Gini Anno. Acc. 2006/2007 Equilibrio Statico Manipolatore Il manipolatore può essere rappresentato
Dinamica del Manipolatore (seconda parte) Ph.D Ing. Michele Folgheraiter Corso di ROBOTICA2 Prof.ssa Giuseppina Gini Anno. Acc. 2006/2007 Equilibrio Statico Manipolatore Il manipolatore può essere rappresentato
STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
 Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Controllo Adattativo
 Corso di Robotica 2 Controllo Adattativo Prof. Alessandro De Luca A. De Luca Motivazioni e approccio necessità dell adattamento nella legge di controllo incertezza sui parametri dinamici del robot scarsa
Corso di Robotica 2 Controllo Adattativo Prof. Alessandro De Luca A. De Luca Motivazioni e approccio necessità dell adattamento nella legge di controllo incertezza sui parametri dinamici del robot scarsa
Meccanica Dinamica del punto materiale
 Meccanica 18-19 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente (statico,
Meccanica 18-19 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente (statico,
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Dinamica dei sistemi materiali Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Dinamica dei sistemi materiali Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
1 Sistemi di riferimento
 Università di Bologna - Corsi di Laurea Triennale in Ingegneria, II Facoltà - Cesena Esercitazioni del corso di Fisica Generale L-A Anno accademico 2006-2007 1 Sistemi di riferimento Le grandezze usate
Università di Bologna - Corsi di Laurea Triennale in Ingegneria, II Facoltà - Cesena Esercitazioni del corso di Fisica Generale L-A Anno accademico 2006-2007 1 Sistemi di riferimento Le grandezze usate
69.8/3 = 23.2 = 23 automobili
 Meccanica 19 Aprile 2017 Problema 1 (1 punto) Una moto salta una fila di automobili di altezza h= 1.5 m e lunghezza l=3m ciascuna. La moto percorre una rampa che forma con l orizzontale un angolo = 30
Meccanica 19 Aprile 2017 Problema 1 (1 punto) Una moto salta una fila di automobili di altezza h= 1.5 m e lunghezza l=3m ciascuna. La moto percorre una rampa che forma con l orizzontale un angolo = 30
SISTEMA DI POSIZIONAMENTO MICROMETRICO PER APPLICAZIONI CON FASCI DI PARTICELLE
 UNIVERSITA DEGLI STUDI DI CATANIA FACOLTA DI INGEGNERIA ISTITUTO NAZIONALE DI FISICA NUCLEARE LABORATORI NAZIONALI DEL SUD Corso di Laurea di I livello in Ingegneria Informatica SISTEMA DI POSIZIONAMENTO
UNIVERSITA DEGLI STUDI DI CATANIA FACOLTA DI INGEGNERIA ISTITUTO NAZIONALE DI FISICA NUCLEARE LABORATORI NAZIONALI DEL SUD Corso di Laurea di I livello in Ingegneria Informatica SISTEMA DI POSIZIONAMENTO
Cinematica e Controllo di un robot mobile
 Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
MODELLO COMPLETO PER IL CONTROLLO. D r (s) U(s) Y (s) d m (t): disturbi misurabili. d r (t): disturbi non misurabili
 U(s) Y (s) d m (t): disturbi misurabili. d r (t): disturbi non misurabili") MODELLO COMPLETO PER IL CONTROLLO D m (s) D r (s) Y o (s) U(s) P (s) Y (s) d m (t): disturbi misurabili d r (t): disturbi non misurabili y o (t): andamento desiderato della variabile controllata u(t):
MODELLO COMPLETO PER IL CONTROLLO D m (s) D r (s) Y o (s) U(s) P (s) Y (s) d m (t): disturbi misurabili d r (t): disturbi non misurabili y o (t): andamento desiderato della variabile controllata u(t):
Progettazione funzionale di sistemi meccanici e meccatronici.
 Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Taglierina 1dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Sistema di taglio al volo ad un
Progettazione funzionale di sistemi meccanici e meccatronici. Progetto d anno: Taglierina 1dof A.A. 2010/2011 Progettazione Funzionale di Sistemi Meccanici e Meccatronici Sistema di taglio al volo ad un
Controllo di un Apparato di Movimentazione
 Esami di Stato per l'abilitazione all'esercizio della professione di Ingegnere Sessione I - 2006 Vecchio Ordinamento Ingegneria Informatica - Tema n. 3 Controllo di un Apparato di Movimentazione Lo schema
Esami di Stato per l'abilitazione all'esercizio della professione di Ingegnere Sessione I - 2006 Vecchio Ordinamento Ingegneria Informatica - Tema n. 3 Controllo di un Apparato di Movimentazione Lo schema
Moti rotatori. Definizioni delle grandezze rotazionali
 Moti rotatori Definizioni delle grandezze rotazionali Moti dei corpi rigidi n Un corpo rigido ha generalmente un moto complesso (vedi un bastone lanciato in aria). n In realtà qualunque moto può essere
Moti rotatori Definizioni delle grandezze rotazionali Moti dei corpi rigidi n Un corpo rigido ha generalmente un moto complesso (vedi un bastone lanciato in aria). n In realtà qualunque moto può essere
Modello dinamico dei robot: approccio di Newton-Eulero
 Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Progettazione e realizzazione di una base robotica bilanciante su ruote
 Politecnico di Milano Corso di Laurea in Ingegneria Elettronica Dipartimento di Elettronica e Informazione Progettazione e realizzazione di una base robotica bilanciante su ruote Martino Migliavacca AI
Politecnico di Milano Corso di Laurea in Ingegneria Elettronica Dipartimento di Elettronica e Informazione Progettazione e realizzazione di una base robotica bilanciante su ruote Martino Migliavacca AI
Macchina a regime periodico
 Macchina a regime periodico rev. 1.2 J m J v τ, η t r φ motore l m F x, ẋ, ẍ (P.M.E.) p m p a Figura 1: Schema dell impianto di pompaggio Della pompa volumetrica a stantuffo a singolo effetto rappresentata
Macchina a regime periodico rev. 1.2 J m J v τ, η t r φ motore l m F x, ẋ, ẍ (P.M.E.) p m p a Figura 1: Schema dell impianto di pompaggio Della pompa volumetrica a stantuffo a singolo effetto rappresentata