Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
|
|
|
- Ottavia Di Matteo
- 6 anni fa
- Visualizzazioni
Transcript


1 Controllo dei robot Introduzione al corso Prof. Paolo Rocco I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione - P. Rocco [2]
 I campi disciplinari coinvolti sono molteplici: meccanica elettronica controlli automatici informatica misure COMAU SpA Controllo dei")
2 Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per muovere materiali, parti, attrezzi o dispositivi specialistici attraverso vari movimenti programmati, per l esecuzione di diversi compiti (Robot Institute of America, 1980) I campi disciplinari coinvolti sono molteplici: meccanica elettronica controlli automatici informatica misure COMAU SpA Controllo dei robot - Introduzione - P. Rocco [3] Robotica avanzata e industriale La robotica è definibile come lo studio di macchine che possano sostituire l uomo nell esecuzione di un compito, sia in termini di attività fisica che decisionale. Operiamo una distinzione: Robotica avanzata applicazioni in ambiente ostile (spaziale, sottomarino, nucleare, militare ) servizio (applicazioni domestiche, assistenza medica, robotica per protesi mediche, intrattenimento, agricoltura, education, ) tecnologia non ancore matura Robotica industriale applicazioni dei robot in ambito industriale tecnologia matura e affidabile Controllo dei robot - Introduzione - P. Rocco [4]


3 Automazione industriale e robotica L automazione industriale è l insieme delle tecnologie rivolte ad utilizzare sistemi (meccanici, elettronici, informatici) per il controllo e la produzione nell industria, in modo da sostituire l operatore umano, non solo per l esecuzione materiale delle operazioni, ma anche per l elaborazione intelligente delle informazioni. Distinguiamo: Automazione rigida: alti volumi di produzione di manufatti di caratteristiche costanti. Richiede elevatissimi ritmi di produzione. Scarsa o nulla possibilità di riprogrammazione. Automazione programmabile: piccoli o medi volumi di produzione di manufatti di caratteristiche variabili. Deve essere possibile riprogrammare facilmente le sequenze operative. Automazione flessibile: volumi di produzione variabili di manufatti diversi (FMS). Macchinari in grado di essere utilizzati in diverse lavorazioni con modesti cambiamenti. Robot automazione programmabile Controllo dei robot - Introduzione - P. Rocco [5] Il robot industriale Il robot si compone di: Struttura meccanica con attuatori e sensori Unità di governo COMAU SpA COMAU SpA Controllo dei robot - Introduzione - P. Rocco [6]
.")
4 Il sistema meccanico Il manipolatore è costituito da una serie di corpi rigidi (link) connessi da giunti Un estremità della catena è costituita dalla BASE, di norma fissata terra. All altra estremità è presente l END EFFECTOR (pinza, strumento di lavoro). Nel manipolatore si individua una struttura portante che garantisce il posizionamento ed un POLSO che conferisce destrezza, dando i gradi di libertà di orientamento all organo terminale. Controllo dei robot - Introduzione - P. Rocco [7] Il sistema di controllo Il sistema di controllo di un robot è un prodotto molto complesso e sofisticato, che richiede tempi di sviluppo software elevati. I suoi compiti principali sono i seguenti: Interfaccia con l operatore (MMI) Pianificazione delle traiettorie Controllo in tempo reale del moto dei giunti Immagazzinamento dati Gestione dell interazione con altre macchine Diagnostiche, gestione malfunzionamenti Controllo dei robot - Introduzione - P. Rocco [8]
5 Strutture cinematiche Manipolatore cartesiano Tre giunti prismatici Ad ogni grado di libertà ai giunti corrisponde un grado di libertà cartesiano Molto rigido meccanicamente Manipolatore a portale Per la manipolazione di oggetti di peso rilevante I disegni sono tratti dal testo: L.Sciavicco, B.Siciliano Robotica industriale Modellistica e controllo di robot manipolatori (2a ed.) Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P. Rocco [9] Strutture cinematiche Manipolatore cilindrico Un giunto rotoidale e due prismatici Coordinate cilindriche Buona rigidezza meccanica Manipolatore sferico Due giunti rotoidali ed uno prismatico Coordinate sferiche Discreta rigidezza meccanica I disegni sono tratti dal testo: L.Sciavicco, B.Siciliano Robotica industriale Modellistica e controllo di robot manipolatori (2a ed.) Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P. Rocco [10]




6 Strutture cinematiche Manipolatore SCARA Due giunti rotoidali e uno prismatico Rigido a carichi verticali e cedevole a carichi orizzontali Selective Compliance Assembly Robot Arm Manipolatore antropomorfo Tre giunti rotoidali Struttura destra Rigidezza meccanica variabile con la configurazione I disegni sono tratti dal testo: L.Sciavicco, B.Siciliano Robotica industriale Modellistica e controllo di robot manipolatori (2a ed.) Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P. Rocco [11] Esempi di robot industriali AdeptOne XL Struttura SCARA Quattro giunti Portata 12 Kg Ripetibilità: mm COMAU SMART S2 Struttura antropomorfa Sei giunti Portata 16 Kg Ripetibilità: 0.1 mm Gli esempi sono tratti dal testo: L.Sciavicco, B.Siciliano Robotica industriale Modellistica e controllo di robot manipolatori (2a ed.) Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P. Rocco [12]


 Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P.")
![Rocco [13] Esempi di robot industriali Robotics Research K-1207i Struttura antropomorfa Sette giunti Giunto addizionale](/docs-images/71/64400816/images/7-3.jpg "rotoidale: aumenta destrezza e consente di ripiegare FANUC I-21i Struttura antropomorfa Sei giunti Sensore di forza")
7 Esempi di robot industriali ABB IRB 4400 Struttura antropomorfa con parallelogramma Sei giunti Portata 60 Kg Ripetibilità: mm Unità lineare Kuka KL 250 con robot KR 15/2 Struttura antropomorfa montata su slitta con installazione a portale Sei giunti + giunto lineare Portata 25 Kg Ripetibilità: 0.1 mm Gli esempi sono tratti dal testo: L.Sciavicco, B.Siciliano Robotica industriale Modellistica e controllo di robot manipolatori (2a ed.) Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P. Rocco [13] Esempi di robot industriali Robotics Research K-1207i Struttura antropomorfa Sette giunti Giunto addizionale rotoidale: aumenta destrezza e consente di ripiegare FANUC I-21i Struttura antropomorfa Sei giunti Sensore di forza Sistema di visione 3D Gli esempi sono tratti dal testo: L.Sciavicco, B.Siciliano Robotica industriale Modellistica e controllo di robot manipolatori (2a ed.) Mc Graw-Hill, 2000 Controllo dei robot - Introduzione - P. Rocco [14]









![Rocco [15] www.](/docs-images/71/64400816/images/8-9.jpg "fanucrobotics.")
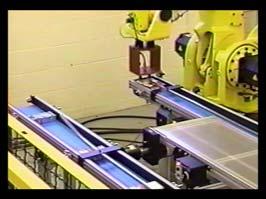
8 Applicazioni tipiche (COMAU SpA) Assemblaggio Saldatura a Punti Saldatura ad arco Carico Scarico Macchine Automazione Linee Interpresse Movimentazione Sigillatura - Siliconatura Lavorazione Controllo dei robot - Introduzione - P. Rocco [15] Assemblaggio Controllo dei robot - Introduzione - P. Rocco [16]





9 Carico-scarico Controllo dei robot - Introduzione - P. Rocco [17] Saldatura Controllo dei robot - Introduzione - P. Rocco [18]




![Rocco [20]](/docs-images/71/64400816/images/10-4.jpg)
10 Lavorazione Controllo dei robot - Introduzione - P. Rocco [19] Verniciatura - Sigillatura Controllo dei robot - Introduzione - P. Rocco [20]









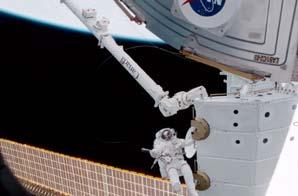
11 Robotica di servizio Controllo dei robot - Introduzione - P. Rocco [21] Robotica spaziale Controllo dei robot - Introduzione - P. Rocco [22]




12 Robotica umanoide Controllo dei robot - Introduzione - P. Rocco [23] Argomenti del corso Cinematica (diretta ed inversa) Cinematica differenziale e statica Dinamica Pianificazione di traiettorie Controllo del moto Controllo dell interazione e controllo servovisivo Controllo dei robot - Introduzione - P. Rocco [24]
13 Cinematica diretta Il problema cinematico diretto consiste nel determinare la posizione e l orientamento dell end effector del manipolatore, a partire dalle coordinate di giunto:? Controllo dei robot - Introduzione - P. Rocco [25] Cinematica inversa Il problema cinematico inverso consiste nel determinare le coordinate di giunto corrispondenti ad una data posizione e ad un dato orientamento dell end effector del manipolatore:??? Controllo dei robot - Introduzione - P. Rocco [26]
14 Cinematica differenziale Si mettono in relazione le velocità dei giunti con le velocità Cartesiane dell end-effector: Per alcuni valori delle coordinate di giunto, la relazione può diventare singolare. Controllo dei robot - Introduzione - P. Rocco [27] Statica Lo studio della statica del manipolatore consiste nel ricavare il legame tra le forze applicate all end effector e le coppie che tengono in equilibrio il sistema.??? Controllo dei robot - Introduzione - P. Rocco [28]

15 Dinamica Il modello dinamico del manipolatore mette in relazione le coppie applicate ai giunti ed il moto (posizioni e velocità) delle coordinate di giunto. La conoscenza del modello dinamico del manipolatore è utile in due contesti: Simulazione Controllo Controllo dei robot - Introduzione - P. Rocco [29] Pianificazione della traiettoria Con la pianificazione della traiettoria si intende stabilire la modalità con cui si vuole che evolva il movimento del manipolatore, da una postura iniziale ad una postura finale. Si tratta di definire sia il percorso geometrico sia la legge di moto da realizzare (ossia la dipendenza temporale di posizioni, velocità ed accelerazioni). Controllo dei robot - Introduzione - P. Rocco [30]
16 Controllo del moto Il controllo del moto del manipolatore si può affrontare in modo: Decentralizzato Centralizzato q md1 R 1 τ 1.. q d q md2 q m1 R 2 τ 2 q m2. q d q d + + K D K P + + v ^ + B(q) + + τ MANIPOLATORE q. q q mdn R n τ n. η(q,q) ^ q mn Con un controllo decentralizzato il problema si riconduce allo studio di n problemi di controllo monovariabili (controllo di servomeccanismi). Controllo dei robot - Introduzione - P. Rocco [31] Il servomeccanismo Un servomeccanismo di posizione è costituito essenzialmente da un motore, un riduttore ed un carico: riduttore motore carico Il problema di controllo si pone nei termini di governare il moto del carico, modulando opportunamente la coppia erogata dal motore. I servomeccanismi di posizione si trovano ovunque: non solo nei robot, ma anche nelle macchine utensili, macchine per lavorazione, macchine tessili, per il packaging, autoveicoli, aerei, periferiche di computer Controllo dei robot - Introduzione - P. Rocco [32]
 può comportare problemi.")

17 Controllo dell interazione Si vuole che il robot interagisca con l'ambiente di lavoro esercitando le forze desiderate. F y x C C l Utilizzare in queste condizioni una strategia di controllo puramente posizionale (la stessa adottata nel moto libero) può comportare problemi. È allora opportuno adottare strategie di controllo che tengano opportunamente conto delle forze che si generano al contatto. Controllo dei robot - Introduzione - P. Rocco [33] Controllo servovisivo Si utilizza una telecamera montata sull end effector del manipolatore. Si possono avere applicazioni nell inseguimento di contorni. Altre applicazioni si hanno nella robotica chirurgica. Se si chiude un anello di controllo sul segnale elaborato dalla telecamera si parla propriamente di controllo servo visivo (visual servoing). Controllo dei robot - Introduzione - P. Rocco [34]
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Robotica industriale. Introduzione al corso. Prof. Paolo Rocco (paolo.rocco@polimi.it)
") Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Fondamenti di robotica
 Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Introduzione al corso
 Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali
 Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Robotica industriale. Richiami di statica del corpo rigido. Prof. Paolo Rocco
 Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Sistemi di produzione discreti. Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali. I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri I sistemi manifatturieri sono impianti
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri I sistemi manifatturieri sono impianti
Meccanica dei Manipolatori. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Programma di fisica. Classe 1^ sez. F A. S. 2015/2016. Docente: prof. ssa Laganà Filomena Donatella
 Programma di fisica. Classe 1^ sez. F A. S. 2015/2016 Docente: prof. ssa Laganà Filomena Donatella MODULO 1: LE GRANDEZZE FISICHE. Notazione scientifica dei numeri, approssimazione, ordine di grandezza.
Programma di fisica. Classe 1^ sez. F A. S. 2015/2016 Docente: prof. ssa Laganà Filomena Donatella MODULO 1: LE GRANDEZZE FISICHE. Notazione scientifica dei numeri, approssimazione, ordine di grandezza.
Introduzione alla Robotica
 1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
Hardware, software e periferiche. Facoltà di Lettere e Filosofia anno accademico 2008/2009 secondo semestre
 Hardware, software e periferiche Facoltà di Lettere e Filosofia anno accademico 2008/2009 secondo semestre Riepilogo - Concetti di base dell informatica L'informatica è quel settore scientifico disciplinare
Hardware, software e periferiche Facoltà di Lettere e Filosofia anno accademico 2008/2009 secondo semestre Riepilogo - Concetti di base dell informatica L'informatica è quel settore scientifico disciplinare
FAG PTB Power Tool Bearings. Cuscinetti speciali per utensili motorizzati
 FAG Power Tool Bearings Cuscinetti speciali per utensili motorizzati Cuscinetti speciali per utensili motorizzati FAG Power Tool Bearings Esempio d ordinazione: 7198-F-T-P4S-UL I cuscinetti convincono
FAG Power Tool Bearings Cuscinetti speciali per utensili motorizzati Cuscinetti speciali per utensili motorizzati FAG Power Tool Bearings Esempio d ordinazione: 7198-F-T-P4S-UL I cuscinetti convincono
PINZE A DUE DITA SERIE IRP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIANI INCLINATI FLANGIA DIN/ISO
 SERIE IRP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIANI INCLINATI FLANGIA DIN/ISO Kip2IRP.pdf Edizione 12-00 Caratteristiche Installabili direttamente robot con flangia DIN/ISO
SERIE IRP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIANI INCLINATI FLANGIA DIN/ISO Kip2IRP.pdf Edizione 12-00 Caratteristiche Installabili direttamente robot con flangia DIN/ISO
KUKA LeichtBau-Roboter LightWeight-Robot
 KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
OLEODINAMICA, OLEOIDRAULICA, IDRAULICA. Tecnologia affine alla pneumatica caratterizzata dai seguenti elementi:
 OLEODINAMICA, OLEOIDRAULICA, IDRAULICA Tecnologia affine alla pneumatica caratterizzata dai seguenti elementi: CARATTERISTICHE CIRCUITALI Gruppo di generazione di energia idraulica Gruppo di distribuzione
OLEODINAMICA, OLEOIDRAULICA, IDRAULICA Tecnologia affine alla pneumatica caratterizzata dai seguenti elementi: CARATTERISTICHE CIRCUITALI Gruppo di generazione di energia idraulica Gruppo di distribuzione
MACCHINE E IMPIANTI AD ALTA TECNOLOGIA PER LA VERNICIATURA INDUSTRIALE DI QUALITÀ
 MACCHINE E IMPIANTI AD ALTA TECNOLOGIA PER LA VERNICIATURA INDUSTRIALE DI QUALITÀ MEC SERVICE È PARTE DEL GRUPPO LAEB, COSTRUITO INTORNO A LAEB SRL, SOCIETÀ OPERANTE DAL 1988 NEL CAMPO DELL AUTOMAZIONE
MACCHINE E IMPIANTI AD ALTA TECNOLOGIA PER LA VERNICIATURA INDUSTRIALE DI QUALITÀ MEC SERVICE È PARTE DEL GRUPPO LAEB, COSTRUITO INTORNO A LAEB SRL, SOCIETÀ OPERANTE DAL 1988 NEL CAMPO DELL AUTOMAZIONE
Tecnologie dei Sistemi di Automazione e Controllo
 Tecnologie dei Sistemi di Automazione e Controllo Prof. Gianmaria De Tommasi Lezione 8 I Controllori a Logica Programmabile Corso di Laurea Codice insegnamento Email docente Anno accademico N39 N46 M61
Tecnologie dei Sistemi di Automazione e Controllo Prof. Gianmaria De Tommasi Lezione 8 I Controllori a Logica Programmabile Corso di Laurea Codice insegnamento Email docente Anno accademico N39 N46 M61
di manipolatori seriali
 Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
I.I.S.S. G. Marconi Bari. Istituto Tecnico settore Tecnologico :: Liceo Scientifico opzione Scienze applicate. Il Robot a scuola
 Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
FOMIR. Linee di montaggio M-System
 FOMIR FOMIR srl Via Torricelli, 237 I-40059 Fossatone di Medicina (BO) T+39 051 782444 / Fax +39 051 6960514 fomir.it easysae.it Linee di montaggio M-System Linee di montaggio M-System Realizzare delle
FOMIR FOMIR srl Via Torricelli, 237 I-40059 Fossatone di Medicina (BO) T+39 051 782444 / Fax +39 051 6960514 fomir.it easysae.it Linee di montaggio M-System Linee di montaggio M-System Realizzare delle
INTRODUZIONE ALLA TERMODINAMICA. Supponiamo di voler studiare il comportamento di una determinata quantità di gas contenuta
 INTRODUZIONE ALLA TERMODINAMICA Supponiamo di voler studiare il comportamento di una determinata quantità di gas contenuta in un recipiente, ad esempio 5g di ossigeno. Dato l elevato numero di molecole
INTRODUZIONE ALLA TERMODINAMICA Supponiamo di voler studiare il comportamento di una determinata quantità di gas contenuta in un recipiente, ad esempio 5g di ossigeno. Dato l elevato numero di molecole
Tecnologia entusiasmante. Manipolatore Pick & Place liberamente programmabile HP 140T
 Tecnologia entusiasmante Manipolatore Pick & Place liberamente programmabile HP 140T Tecnologia entusiasmante Efficienza, base della manipolazione Come si può aumentare la resa di un impianto già esistente?
Tecnologia entusiasmante Manipolatore Pick & Place liberamente programmabile HP 140T Tecnologia entusiasmante Efficienza, base della manipolazione Come si può aumentare la resa di un impianto già esistente?
Prof. Ing. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari AUTOMAZIONE INDUSTRIALE
 Prof. Ing. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari AUTOMAZIONE INDUSTRIALE Contenuti - Le funzioni di controllo - Funzionamento di un FMS - Pianificazione e scheduling
Prof. Ing. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari AUTOMAZIONE INDUSTRIALE Contenuti - Le funzioni di controllo - Funzionamento di un FMS - Pianificazione e scheduling
INSTALLATORE-MONTATORE DI SISTEMI ELETTRICO-ELETTRONICI
 INSTALLATORE-MONTATORE DI SISTEMI ELETTRICO- ELETTRONICI INSTALLATORE-MONTATORE DI SISTEMI ELETTRICO-ELETTRONICI DEESSCCRRI IIZZI IIOONNEE SSI IINNTTEETTI IICCAA L Installatore-montatore di sistemi elettrico-elettronici
INSTALLATORE-MONTATORE DI SISTEMI ELETTRICO- ELETTRONICI INSTALLATORE-MONTATORE DI SISTEMI ELETTRICO-ELETTRONICI DEESSCCRRI IIZZI IIOONNEE SSI IINNTTEETTI IICCAA L Installatore-montatore di sistemi elettrico-elettronici
CALETTATORI DI BLOCCAGGIO PER ATTRITO
 PER ATTRITO Il sistema di bloccaggio tramite calettamento per attrito rende solidale all albero uno o più organi che permettono di trasmettere il moto o sopportare una spinta assiale. L accoppiamento per
PER ATTRITO Il sistema di bloccaggio tramite calettamento per attrito rende solidale all albero uno o più organi che permettono di trasmettere il moto o sopportare una spinta assiale. L accoppiamento per
Cuscinetti a strisciamento e a rotolamento
 Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
Robotica Industriale
 Corso di Robotica 1 Robotica Industriale Prof. Alessandro De Luca Robotica 1 1 Cosa è un robot? definizione industriale (RIA - SIRI) manipolatore programmabile multiscopo per la movimentazione di materiali,
Corso di Robotica 1 Robotica Industriale Prof. Alessandro De Luca Robotica 1 1 Cosa è un robot? definizione industriale (RIA - SIRI) manipolatore programmabile multiscopo per la movimentazione di materiali,
Argomenti del corso Parte I Caratteristiche generali e strumenti terminali
 Argomenti del corso Parte I Caratteristiche generali e strumenti terminali 1. Concetti generali Finalità e applicazioni dello studio dei sistemi di misura Applicazione in vari campi: esempi Concetto di
Argomenti del corso Parte I Caratteristiche generali e strumenti terminali 1. Concetti generali Finalità e applicazioni dello studio dei sistemi di misura Applicazione in vari campi: esempi Concetto di
Corso di Automazione Industriale 1. Capitolo 2
 Simona Sacone - DIST Corso di Automazione Industriale 1 Capitolo 2 Aspetti tecnologici Simona Sacone - DIST 2 Evoluzione tecnologica NC machine PLC CC machine o Machine Center Numerical Control machine
Simona Sacone - DIST Corso di Automazione Industriale 1 Capitolo 2 Aspetti tecnologici Simona Sacone - DIST 2 Evoluzione tecnologica NC machine PLC CC machine o Machine Center Numerical Control machine
Approccio Meccatronico alla progettazione. Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation
 Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
Approccio Meccatronico alla progettazione Ing. Roberto Loce Solution Architect Motion Control Rockwell Automation Una moderna macchina automatica è un sistema meccatronico Meccanica Organi di trasmissione
Il ripartitore dei costi di riscaldamento
 Il ripartitore dei costi di riscaldamento CONTROLLI QUADRO LEGISLATIVO - RIPARTIZIONE DELLE SPESE DIRETTIVA 2012/27/UE D.L. 102 del 4 Luglio 2014 Riduzione Consumi di Energia primaria del 20% entro 2020
Il ripartitore dei costi di riscaldamento CONTROLLI QUADRO LEGISLATIVO - RIPARTIZIONE DELLE SPESE DIRETTIVA 2012/27/UE D.L. 102 del 4 Luglio 2014 Riduzione Consumi di Energia primaria del 20% entro 2020
2. Sicurezza 2. Sicurezza generale delle macchine
 2. Sicurezza 2. Sicurezza generale delle macchine 2.2.5.2 DISPOSITIVI DI COMANDO A DUE MANI UNI EN 574/98 Descrizione Il comando a due mani è un dispositivo di sicurezza che garantisce, se correttamente
2. Sicurezza 2. Sicurezza generale delle macchine 2.2.5.2 DISPOSITIVI DI COMANDO A DUE MANI UNI EN 574/98 Descrizione Il comando a due mani è un dispositivo di sicurezza che garantisce, se correttamente
UD1. L informatica nell era di Matrix
 CORSO DI INFORMATICA UD1. L informatica nell era di Matrix Bruno Ronsivalle Cosa si intende per "informatica"? Cosa si intende per "tecnologia informatica"? Qual è la differenza tra "analogico" e "digitale"?
CORSO DI INFORMATICA UD1. L informatica nell era di Matrix Bruno Ronsivalle Cosa si intende per "informatica"? Cosa si intende per "tecnologia informatica"? Qual è la differenza tra "analogico" e "digitale"?
Unità di rilavorazione WXR 3. Pronti al lancio!
 Unità di rilavorazione WXR 3 Pronti al lancio! Completamento della famiglia WX Saldatura Aria calda Dissaldatura Rilavorazione WX 1 WX 2 WXA 2 WXD 2 WXR 3 WXR 3 Unità di rilavorazione multifunzionale a
Unità di rilavorazione WXR 3 Pronti al lancio! Completamento della famiglia WX Saldatura Aria calda Dissaldatura Rilavorazione WX 1 WX 2 WXA 2 WXD 2 WXR 3 WXR 3 Unità di rilavorazione multifunzionale a
ISTITUTO ISTRUZIONE SUPERIORE G. Vallauri FOSSANO (CN) DIPARTIMENTO di MECCANICA. Descrizione e finalità
 DIPARTIMENTO di MECCANICA. Descrizione e finalità") Descrizione e finalità Autonomous Guenda Vall è un veicolo robotizzato in grado di muoversi e monitorare l ambiente circostante in modalità autonoma oppure telecontrollata con la finalità di esplorare
Descrizione e finalità Autonomous Guenda Vall è un veicolo robotizzato in grado di muoversi e monitorare l ambiente circostante in modalità autonoma oppure telecontrollata con la finalità di esplorare
ROBOT SCARA PESANTE ROBOT
 ROBOT SCARA Apiel realizza due modelli di robot SCARA che trovano la loro applicazione principale per la realizzazione di isole di pallettizzazione. I due modelli si differenziano per la portata al polso
ROBOT SCARA Apiel realizza due modelli di robot SCARA che trovano la loro applicazione principale per la realizzazione di isole di pallettizzazione. I due modelli si differenziano per la portata al polso
Ricerca Operativa. Docente. 1. Introduzione
 Ricerca Operativa 1. Introduzione Docente Luigi De Giovanni Dipartimento di Matematica Pura e Applicata (Torre Archimede) uff. 427 Tel. 049 827 1349 email: luigi@math.unipd.it www.math.unipd.it/~luigi
Ricerca Operativa 1. Introduzione Docente Luigi De Giovanni Dipartimento di Matematica Pura e Applicata (Torre Archimede) uff. 427 Tel. 049 827 1349 email: luigi@math.unipd.it www.math.unipd.it/~luigi
INGEGNERIA dell AUTOMAZIONE a Padova
 INGEGNERIA dell AUTOMAZIONE a Padova 1 Struttura dei corsi di laurea nel settore 1 Primo anno comune 2 3 INGEGNERIA DELL INFORMAZIONE ELET -prof IFprof BIOprof 4 * 5 * AUT ELET IF TLC BIO Attenzione!!!
INGEGNERIA dell AUTOMAZIONE a Padova 1 Struttura dei corsi di laurea nel settore 1 Primo anno comune 2 3 INGEGNERIA DELL INFORMAZIONE ELET -prof IFprof BIOprof 4 * 5 * AUT ELET IF TLC BIO Attenzione!!!
Normativa (UNI EN ISO 8373)
") UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
UNIVERSITÀ DEGLI STUDI DI BERGAMO CORSO DI MECCANICA DEI ROBOT INTRODUZIONE 02 Normativa (UNI EN ISO 8373) Robot di manipolazione industriale robot manipolatore a 3 o più gdl, a comando automatico, programmabile,
GILGEN SLA BREAK-OUT IN COMBINAZIONE CON PS50. PORTE AUTOMATICHE PER VIE DI FUGA
 GILGEN SLA BREAK-OUT IN COMBINAZIONE CON PS50. PORTE AUTOMATICHE PER VIE DI FUGA NUOVO PROFILO PS50 E AUTOMATISMO SLA. UNO STANDARD PER TUTTI GLI INGRESSI AUTOMATICI Caratteristiche tecniche e dimensioni
GILGEN SLA BREAK-OUT IN COMBINAZIONE CON PS50. PORTE AUTOMATICHE PER VIE DI FUGA NUOVO PROFILO PS50 E AUTOMATISMO SLA. UNO STANDARD PER TUTTI GLI INGRESSI AUTOMATICI Caratteristiche tecniche e dimensioni
Centri C.N.C. Free&Easy Smile
 Centri C.N.C. Centri C.N.C. ll mini centro di lavoro professionale JOLLY è una apparecchiatura a 5 assi, nata per soddisfare le esigenze dei laboratori e centri di fresaggio più ambiziosi. Può eseguire
Centri C.N.C. Centri C.N.C. ll mini centro di lavoro professionale JOLLY è una apparecchiatura a 5 assi, nata per soddisfare le esigenze dei laboratori e centri di fresaggio più ambiziosi. Può eseguire
6.1 SEGA A NASTRO. Scheda. Descrizione della macchina
 Scheda 6 Lavorazione: Macchina: TAGLIO SEGA PER METALLI Le seghe per metalli sono macchine che vengono utilizzate per il taglio a freddo di metalli che si trovano sotto forma di billette, barre, profilati,
Scheda 6 Lavorazione: Macchina: TAGLIO SEGA PER METALLI Le seghe per metalli sono macchine che vengono utilizzate per il taglio a freddo di metalli che si trovano sotto forma di billette, barre, profilati,
EcoRemote SISTEMA DI GESTIONE DI UNA STAZIONE DI MONITORAGGIO DELLA QUALITÀ DELL ARIA. Ingegneria dei sistemi
 Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
Sistema per l acquisizione, l elaborazione e la gestione delle apparecchiature di una stazione di monitoraggio della qualità dell aria sviluppato da Project Automation S.p.A. è il sistema periferico per
GTTS5: Processi produttivi innovativi. Introduzione R-0353-D0415-CI-I 1
 GTTS5: Processi produttivi innovativi Introduzione R-0353-D0415-CI-I 1 Facts and figures 3D Printing Impact (CSC Source) 2 Le sfide specifiche Obiettivo della linea di intervento LI5: Processi produttivi
GTTS5: Processi produttivi innovativi Introduzione R-0353-D0415-CI-I 1 Facts and figures 3D Printing Impact (CSC Source) 2 Le sfide specifiche Obiettivo della linea di intervento LI5: Processi produttivi
Introduzione alla Modellazione Solida
 Introduzione alla Modellazione Solida Obiettivi della Modellazione Solida e del CAD CAD e progettazione, CAD e sviluppo prodotto Esempio Evoluzione storica Competenze richieste Significato Con Computer
Introduzione alla Modellazione Solida Obiettivi della Modellazione Solida e del CAD CAD e progettazione, CAD e sviluppo prodotto Esempio Evoluzione storica Competenze richieste Significato Con Computer
Caratteristiche generali degli F.M.S.
 Caratteristiche generali degli F.M.S. 1 Definizione di F.M.S. Flexible Manufacturing System (sistema flessibile di lavorazione) F.M.S. è un gruppo di M.U. automatizzate collegate da un sistema automatico
Caratteristiche generali degli F.M.S. 1 Definizione di F.M.S. Flexible Manufacturing System (sistema flessibile di lavorazione) F.M.S. è un gruppo di M.U. automatizzate collegate da un sistema automatico
Concetti Introduttivi. Il Computer
 Concetti Introduttivi Il Computer Introduzione Informazione Notizia, dato o elemento che consente di avere conoscenza più o meno esatta di fatti, situazioni, modi di essere Messaggio Tutto ciò che porta
Concetti Introduttivi Il Computer Introduzione Informazione Notizia, dato o elemento che consente di avere conoscenza più o meno esatta di fatti, situazioni, modi di essere Messaggio Tutto ciò che porta
Impianti di propulsione navale
 Motori diesel 4T Interfacce con il sistema nave Ogni motore installato a bordo ha sostanzialmente quattro tipologie di interfacce con la nave, precisamente: Trasmissione potenza: collegamento meccanico
Motori diesel 4T Interfacce con il sistema nave Ogni motore installato a bordo ha sostanzialmente quattro tipologie di interfacce con la nave, precisamente: Trasmissione potenza: collegamento meccanico
Competenze di ambito Prerequisiti Abilità / Capacità Conoscenze Livelli di competenza
 Docente: LASEN SERGIO Classe: 3MAT Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE_STRUTTURA E COMPONENTI Saper effettuare
Docente: LASEN SERGIO Classe: 3MAT Materia: Tecnologie e Tecniche di Installazione e di Manutenzione di Apparati e Impianti Civili e Industriali. MODULO 1 - AUTOMAZIONE_STRUTTURA E COMPONENTI Saper effettuare
Analisi e Controllo di un manipolatore S.C.A.R.A.
 Università degli Studi di Napoli Federico II FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria dell Automazione Elaborato Tecnico, Controllo dei Robot Analisi e Controllo di un manipolatore S.C.A.R.A.
Università degli Studi di Napoli Federico II FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria dell Automazione Elaborato Tecnico, Controllo dei Robot Analisi e Controllo di un manipolatore S.C.A.R.A.
TECNICO SUPERIORE PER IL RILIEVO ARCHITETTONICO
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE EDILIZIA TECNICO SUPERIORE PER IL RILIEVO ARCHITETTONICO STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA PROFESSIONALE
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE EDILIZIA TECNICO SUPERIORE PER IL RILIEVO ARCHITETTONICO STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA PROFESSIONALE
POSIVEL max 60 Kg. MINIPARTNER max 80 Kg. PARTNER PM max 450 Kg. Manipolatori industriali
 MINIPARTNER max 80 Kg POSIVEL max 60 Kg PARTNER PM max 450 Kg MAXIPARTNER max 900 Kg PARTNER PS max 300 Kg POSIFIL max 120 Kg Manipolatori industriali L esperienza della Dalmec si basa sulla realizzazione
MINIPARTNER max 80 Kg POSIVEL max 60 Kg PARTNER PM max 450 Kg MAXIPARTNER max 900 Kg PARTNER PS max 300 Kg POSIFIL max 120 Kg Manipolatori industriali L esperienza della Dalmec si basa sulla realizzazione
Tipologie e caratteristiche strutturali. Parte 2
 Tipologie e caratteristiche strutturali Parte 2 Si è visto che i timoni presentano una specie di zona neutra intorno alla loro posizione media, cioè che in quella determinata zona, per piccole variazioni
Tipologie e caratteristiche strutturali Parte 2 Si è visto che i timoni presentano una specie di zona neutra intorno alla loro posizione media, cioè che in quella determinata zona, per piccole variazioni
L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO.
 L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO. DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE Confronto tra giunti GRADI DI LIBERTA DEL ROBOT Si definiscono
L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO. DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE Confronto tra giunti GRADI DI LIBERTA DEL ROBOT Si definiscono
Operatore alla riparazione dei veicoli a motore. Standard della Figura nazionale
 Operatore alla riparazione dei veicoli a motore Standard della Figura nazionale 73 Denominazione della figura OPERATORE ALLA RIPARAZIONE DEI VEICOLI A MOTORE Indirizzi della figura Riparazione parti e
Operatore alla riparazione dei veicoli a motore Standard della Figura nazionale 73 Denominazione della figura OPERATORE ALLA RIPARAZIONE DEI VEICOLI A MOTORE Indirizzi della figura Riparazione parti e
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 SETTORE MECCANICA; PRODUZIONE E MANUTENZIONE DI MACCHINE; IMPIANTISTICA Processo Lavorazioni Meccaniche
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 SETTORE MECCANICA; PRODUZIONE E MANUTENZIONE DI MACCHINE; IMPIANTISTICA Processo Lavorazioni Meccaniche
Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento
 Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento Antonio Marra - Schneider Electric Esempio Applicativo: Vertical
Implementazione di un sistema di moduli lineari: dimensionamento dei motori, definizione dei profili e mappatura software del movimento Antonio Marra - Schneider Electric Esempio Applicativo: Vertical
La robotica terrestre
 Applicazioni e tecnologie dei sistemi robotici intelligenti - 23 settembre 2004 La robotica terrestre Sergio Taraglio FUS-ROB ENEA - C.R. Casaccia 1 Sommario Cos è un robot Esempi di robot Cosa si trova
Applicazioni e tecnologie dei sistemi robotici intelligenti - 23 settembre 2004 La robotica terrestre Sergio Taraglio FUS-ROB ENEA - C.R. Casaccia 1 Sommario Cos è un robot Esempi di robot Cosa si trova
oikos centro di lavoro a 6 assi per travi e moduli parete oikos
 oikos centro di lavoro a 6 assi per travi e moduli parete oikos oikos centro di lavoro a 6 assi per travi e moduli pareti. Centro di lavoro a 6 assi, soluzione tecnologica ottimale per la lavorazione di
oikos centro di lavoro a 6 assi per travi e moduli parete oikos oikos centro di lavoro a 6 assi per travi e moduli pareti. Centro di lavoro a 6 assi, soluzione tecnologica ottimale per la lavorazione di
LEA_IT_CRC Deformometro removibile Strumenti e Sistemi di Monitoraggio Geotecnico e Strutturale
 Descrizione _ Lo strumento, che ha una base di 700 mm (a richiesta 300 mm) viene utilizzato per la misure degli spostamenti relativi fra due punti. È disponibile in due diverse versioni; una in acciaio
Descrizione _ Lo strumento, che ha una base di 700 mm (a richiesta 300 mm) viene utilizzato per la misure degli spostamenti relativi fra due punti. È disponibile in due diverse versioni; una in acciaio
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA
 REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 Servizi di informatica Processo Sviluppo e gestione di prodotti e servizi informatici Sequenza di
REPERTORIO DELLE QUALIFICAZIONI PROFESSIONALI DELLA REGIONE CAMPANIA SETTORE ECONOMICO PROFESSIONALE 1 Servizi di informatica Processo Sviluppo e gestione di prodotti e servizi informatici Sequenza di
Opzione manutentore impianti elettrici e automazione
 PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
PROGRAMMAZIONE DI T.T.I.M. (TECNOLOGIE E TECNICHE DELL'INSTALLAZIONE E DELLA MANUTENZIONE) CLASSE III Opzione manutentore impianti elettrici e automazione 1 UNITA' DI MISURA E CONVERSIONI (modulo propedeutico)
CONVEGNO FINALE PROGETTO DODICH «Lo sviluppo di una macchina autonoma per la viticoltura»
 CONVEGNO FINALE PROGETTO DODICH «Lo sviluppo di una macchina autonoma per la viticoltura» Gli Interventi Ore 10.00: Saluto di Benvenuto, Prof. Boatto, UNIPD- Dipartimento Territorio e sistemi Agro-forestali.
CONVEGNO FINALE PROGETTO DODICH «Lo sviluppo di una macchina autonoma per la viticoltura» Gli Interventi Ore 10.00: Saluto di Benvenuto, Prof. Boatto, UNIPD- Dipartimento Territorio e sistemi Agro-forestali.
Apparecchiature e macchinari per l'industria BitAndCloud ecosistema IIoT
 La globalizzazione dei mercati spinge verso scenari sempre più competitivi e richiede innovazione continua per sostenere il successo dei propri prodotti Bitmill propone di inserire il vantaggio competitivo
La globalizzazione dei mercati spinge verso scenari sempre più competitivi e richiede innovazione continua per sostenere il successo dei propri prodotti Bitmill propone di inserire il vantaggio competitivo
AUDIOLUX ROBOTICA. Alcune delle applicazioni realizzate da Audiolux Arte e Tecnologia 1997-2014
 AUDIOLUX ROBOTICA Alcune delle applicazioni realizzate da Audiolux Arte e Tecnologia 1997-2014 Audiolux snc di G.Schipani & C. - ROBOTICA VIDEO EIDOMATICA 1 - DISK-JAGLER Robot manipolatore per stampa,
AUDIOLUX ROBOTICA Alcune delle applicazioni realizzate da Audiolux Arte e Tecnologia 1997-2014 Audiolux snc di G.Schipani & C. - ROBOTICA VIDEO EIDOMATICA 1 - DISK-JAGLER Robot manipolatore per stampa,
PROFILO FORMATIVO Profilo professionale e percorso formativo
 Agenzia del Lavoro Provincia Autonoma di Trento PROFILO FORMATIVO Profilo professionale e percorso formativo DENOMINAZIONE FIGURA PROFESSIONALE - OPERATORE AGLI IMPIANTI AUTOMATIZZATI - DESCRIZIONE PROFILO
Agenzia del Lavoro Provincia Autonoma di Trento PROFILO FORMATIVO Profilo professionale e percorso formativo DENOMINAZIONE FIGURA PROFESSIONALE - OPERATORE AGLI IMPIANTI AUTOMATIZZATI - DESCRIZIONE PROFILO
ATERM EVA BASIC HIGHFLOW VALVOLA A BILANCIAMENTO AUTOMATICO E CONTROLLO ON-OFF
 APPLICAZIONI Valvola Aterm Basic Highflow con attuatore La valvola Aterm EVA Basic Highflow è progettata in modo specifico per il bilanciamento di unità di raffreddamento e riscaldamento. Con il suo semplice
APPLICAZIONI Valvola Aterm Basic Highflow con attuatore La valvola Aterm EVA Basic Highflow è progettata in modo specifico per il bilanciamento di unità di raffreddamento e riscaldamento. Con il suo semplice
PESA A PONTE METALLICA
 PESA A PONTE METALLICA mod. SPT-28 modello SPT-28 Pesa a ponte modulare mod. SPT-28 in versione sopraelevata per la pesatura di automezzi stradali fino ad un massimo di 80t SISTEMA DI PESATURA TRASPORTABILE
PESA A PONTE METALLICA mod. SPT-28 modello SPT-28 Pesa a ponte modulare mod. SPT-28 in versione sopraelevata per la pesatura di automezzi stradali fino ad un massimo di 80t SISTEMA DI PESATURA TRASPORTABILE
Backup e Disaster Recovery In Cloud. Basso impatto, elevato valore. 100% Cloud 100% Canale 100% Italia
 Backup e Disaster Recovery In Cloud. Basso impatto, elevato valore. 100% Cloud 100% Canale 100% Italia Scenario. PERCHÉ PARLIAMO DI CONTINUITÀ DEL BUSINESS? I dati sono la nuova moneta del mondo digitale.
Backup e Disaster Recovery In Cloud. Basso impatto, elevato valore. 100% Cloud 100% Canale 100% Italia Scenario. PERCHÉ PARLIAMO DI CONTINUITÀ DEL BUSINESS? I dati sono la nuova moneta del mondo digitale.
DISCIPLINA: TECNOLOGIE E PROGETTAZIONE DI SISTEMI ELETTRICI ED ELETTRONICI CLASSE DI CONCORSO: A035 - C270
 A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
A: Quadri elettrici OBIETTIVI DEL Conoscere i principali apparecchi di comando, segnalazione e protezione degli impianti elettrici. Conoscere il CAD elettrico. Saper descrivere le caratteristiche degli
Sistemi di Controllo Multivariabile
 Sistemi di Controllo Multivariabile Controllo in retroazione di stato di un robot manipolatore PUMA Carmine Dario Bellicoso M58/028 Andrea Gerardo Barbato M58/036 Processo implementato Robot PUMA Riferimento
Sistemi di Controllo Multivariabile Controllo in retroazione di stato di un robot manipolatore PUMA Carmine Dario Bellicoso M58/028 Andrea Gerardo Barbato M58/036 Processo implementato Robot PUMA Riferimento
IM-6145. Un sistema di misurazione completamente nuovo. p osi z iona re e. Sistema di misurazione dimensionale tramite immagini. Esempi di misurazione
 IM-6145 Un sistema di completamente nuovo È su ffi c iente p osi z iona re e preme re Sistema di dimensionale tramite immagini Esempi di Panoramica del sistema di dimensionale tramite immagini Obiettivo
IM-6145 Un sistema di completamente nuovo È su ffi c iente p osi z iona re e preme re Sistema di dimensionale tramite immagini Esempi di Panoramica del sistema di dimensionale tramite immagini Obiettivo
Modello dinamico dei robot:
 Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC
 PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC A cura di Massimo Reboldi La programmazione EIA/ISO! Introduzione! Assi e Riferimenti! Linguaggio di programmazione! Grammatica;! Lessico;! Funzioni N, G, M,
PROGRAMMAZIONE EIA/ISO Macchine Utensili CNC A cura di Massimo Reboldi La programmazione EIA/ISO! Introduzione! Assi e Riferimenti! Linguaggio di programmazione! Grammatica;! Lessico;! Funzioni N, G, M,
FISICA. Serie 11: Dinamica del punto materiale V. Esercizio 1 Legge di Hooke. Esercizio 2 Legge di Hooke. I liceo
 FISICA Serie : Dinamica del punto materiale V I liceo Esercizio Legge di Hooke Una molla è sottomessa ad una deformazione. I dati riportati nel grafico qui sotto mostrano l intensità della forza applicata
FISICA Serie : Dinamica del punto materiale V I liceo Esercizio Legge di Hooke Una molla è sottomessa ad una deformazione. I dati riportati nel grafico qui sotto mostrano l intensità della forza applicata
Le aree dell informatica
 Fondamenti di Informatica per la Sicurezza a.a. 2006/07 Le aree dell informatica Stefano Ferrari UNIVERSITÀ DEGLI STUDI DI MILANO DIPARTIMENTO DI TECNOLOGIE DELL INFORMAZIONE Stefano Ferrari Università
Fondamenti di Informatica per la Sicurezza a.a. 2006/07 Le aree dell informatica Stefano Ferrari UNIVERSITÀ DEGLI STUDI DI MILANO DIPARTIMENTO DI TECNOLOGIE DELL INFORMAZIONE Stefano Ferrari Università
E un trasduttore digitale in grado di fornire una indicazione binaria della. Non sfruttano alcun principio fisico. Nei trasduttori lineari a principio
 TRASDUTTORI: ENCODER (detto anche CODIFICATORE OTTICO) E un trasduttore digitale in grado di fornire una indicazione binaria della grandezza fisica oggetto di misura ENCODER ASSOLUTO DI POSIZIONE Non sfruttano
TRASDUTTORI: ENCODER (detto anche CODIFICATORE OTTICO) E un trasduttore digitale in grado di fornire una indicazione binaria della grandezza fisica oggetto di misura ENCODER ASSOLUTO DI POSIZIONE Non sfruttano
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II FACOLTÀ DI INGEGNERIA TESINA DI CONTROLLO DEI ROBOT
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II FACOLTÀ DI INGEGNERIA TESINA DI CONTROLLO DEI ROBOT Modellistica, pianiaicazione e controllo di un robot SCARA e di un braccio antropomorfo Candidati Davide
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II FACOLTÀ DI INGEGNERIA TESINA DI CONTROLLO DEI ROBOT Modellistica, pianiaicazione e controllo di un robot SCARA e di un braccio antropomorfo Candidati Davide
Processi e impianti. industriali. Processi e impianti. Processi e impianti. Processi e impianti. Processo industriale:
 industriali Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
industriali Processo industriale: combinazione di operazioni e trasformazioni chimicofisiche che permettono l ottenimento di prodotti a partire da materie prime, le quali possono cambiare alcune delle
S C U O L A I T A L I A N A D I M A D R I D. Anno scolastico T E C N O L O G I A
 S C U O L A I T A L I A N A D I M A D R I D Anno scolastico 2012 2013 T E C N O L O G I A P R O G R A M M A Z I O N E C L A S S I T E R Z E: IIIA IIIB IIIC In relazione al Piano di Lavoro Triennale specifico
S C U O L A I T A L I A N A D I M A D R I D Anno scolastico 2012 2013 T E C N O L O G I A P R O G R A M M A Z I O N E C L A S S I T E R Z E: IIIA IIIB IIIC In relazione al Piano di Lavoro Triennale specifico
Lecce, 3 luglio aula SP4 - Edificio Sperimentale Tabacchi
 Lecce, 3 luglio aula SP4 - Edificio Sperimentale Tabacchi LA DOMOTICA NELLA SOCIETA DELL INFORMAZIONE Aspetti giuridici, sociali, economici Relazione introduttiva Prof. Donato A. Limone Direttore del Laboratorio
Lecce, 3 luglio aula SP4 - Edificio Sperimentale Tabacchi LA DOMOTICA NELLA SOCIETA DELL INFORMAZIONE Aspetti giuridici, sociali, economici Relazione introduttiva Prof. Donato A. Limone Direttore del Laboratorio
4. LE FORZE E LA LORO MISURA
 4. LE FORZE E LA LORO MISURA 4.1 - Le forze e i loro effetti Tante azioni che facciamo o vediamo non sono altro che il risultato di una o più forze. Le forze non si vedono e ci accorgiamo della loro presenza
4. LE FORZE E LA LORO MISURA 4.1 - Le forze e i loro effetti Tante azioni che facciamo o vediamo non sono altro che il risultato di una o più forze. Le forze non si vedono e ci accorgiamo della loro presenza
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Corso di Sistemi Informativi Geografici. Presentazione del corso Maria Luisa Damiani A.A. 2013-14
 Corso di Sistemi Informativi Geografici Presentazione del corso Maria Luisa Damiani A.A. 2013-14 Sommario Contenuti Modalita' d'esame Sito e calendario Obiettivi e contenuto del corso Introduzione ai modelli
Corso di Sistemi Informativi Geografici Presentazione del corso Maria Luisa Damiani A.A. 2013-14 Sommario Contenuti Modalita' d'esame Sito e calendario Obiettivi e contenuto del corso Introduzione ai modelli
STAR, il sistema di tracking solare elio-referenziato. Alessandro Rossi Green City Energy Pisa, 2 luglio 2010
 STAR, il sistema di tracking solare elio-referenziato Alessandro Rossi Green City Energy Pisa, 2 luglio 2010 Outline Chi è Alitec Il progetto SCOOP Il fotovoltaico a concentrazione (CPV) Requisiti di puntamento
STAR, il sistema di tracking solare elio-referenziato Alessandro Rossi Green City Energy Pisa, 2 luglio 2010 Outline Chi è Alitec Il progetto SCOOP Il fotovoltaico a concentrazione (CPV) Requisiti di puntamento
RenderCAD S.r.l. Formazione
 Descrizione AutoCAD rappresenta sempre più, oltre che un software di disegno assistito, una piattaforma ed uno standard di lavoro dal quale non si può più prescindere per tutti coloro che operano in ambito
Descrizione AutoCAD rappresenta sempre più, oltre che un software di disegno assistito, una piattaforma ed uno standard di lavoro dal quale non si può più prescindere per tutti coloro che operano in ambito
AnthericaCMS. Gestisci in autonomia i contenuti del tuo sito-web
 AnthericaCMS Gestisci in autonomia i contenuti del tuo sito-web INDICE I vantaggi di un sito dinamico... 1 I vantaggi di anthericacms... 2 La piattaforma di gestione dei contenuti... 3 Accesso: le sezioni...
AnthericaCMS Gestisci in autonomia i contenuti del tuo sito-web INDICE I vantaggi di un sito dinamico... 1 I vantaggi di anthericacms... 2 La piattaforma di gestione dei contenuti... 3 Accesso: le sezioni...
AXO - Architettura dei Calcolatori e Sistema Operativo. organizzazione strutturata dei calcolatori
 AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
AXO - Architettura dei Calcolatori e Sistema Operativo organizzazione strutturata dei calcolatori I livelli I calcolatori sono progettati come una serie di livelli ognuno dei quali si basa sui livelli
CURRICOLO DI GEOGRAFIA COMPETENZA CHIAVE EUROPE : COMPETENZE DI BASE IN MATEMATICA, SCIENZA E TECNOLOGIA
 CURRICOLO DI GEOGRAFIA COMPETENZA CHIAVE EUROPE : COMPETENZE DI BASE IN MATEMATICA, SCIENZA E TECNOLOGIA LIVELLO SCOLASTICO SCUOLA SECONDARIA DI PRIMO GRADO DISCIPLINA : GEOGRAFIA DISCIPLINE CONCORRENTI:
CURRICOLO DI GEOGRAFIA COMPETENZA CHIAVE EUROPE : COMPETENZE DI BASE IN MATEMATICA, SCIENZA E TECNOLOGIA LIVELLO SCOLASTICO SCUOLA SECONDARIA DI PRIMO GRADO DISCIPLINA : GEOGRAFIA DISCIPLINE CONCORRENTI:
1)MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto )
MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto )") MANIPOLATORI BOBINE MANIPOLATORI PER BOBINE IN CARTA E PLASTICA. 1)MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto4724-4725) -MODELLO: Liftronic -TIPO DI PRESA: Movimentazione di bobine di carta. -CICLO
MANIPOLATORI BOBINE MANIPOLATORI PER BOBINE IN CARTA E PLASTICA. 1)MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto4724-4725) -MODELLO: Liftronic -TIPO DI PRESA: Movimentazione di bobine di carta. -CICLO