L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO.
|
|
|
- Antonina Franchi
- 8 anni fa
- Visualizzazioni
Transcript
1 L EVOLUZIONE DEI SISTEMI PRODUTTIVI NEL SETTORE MECCANICO DEL NOVECENTO.

2

3

4 DEFINIZIONE DEL ROBOT INDUSTRIALE MORFOLOGIA DEL ROBOT INDUSTRIALE

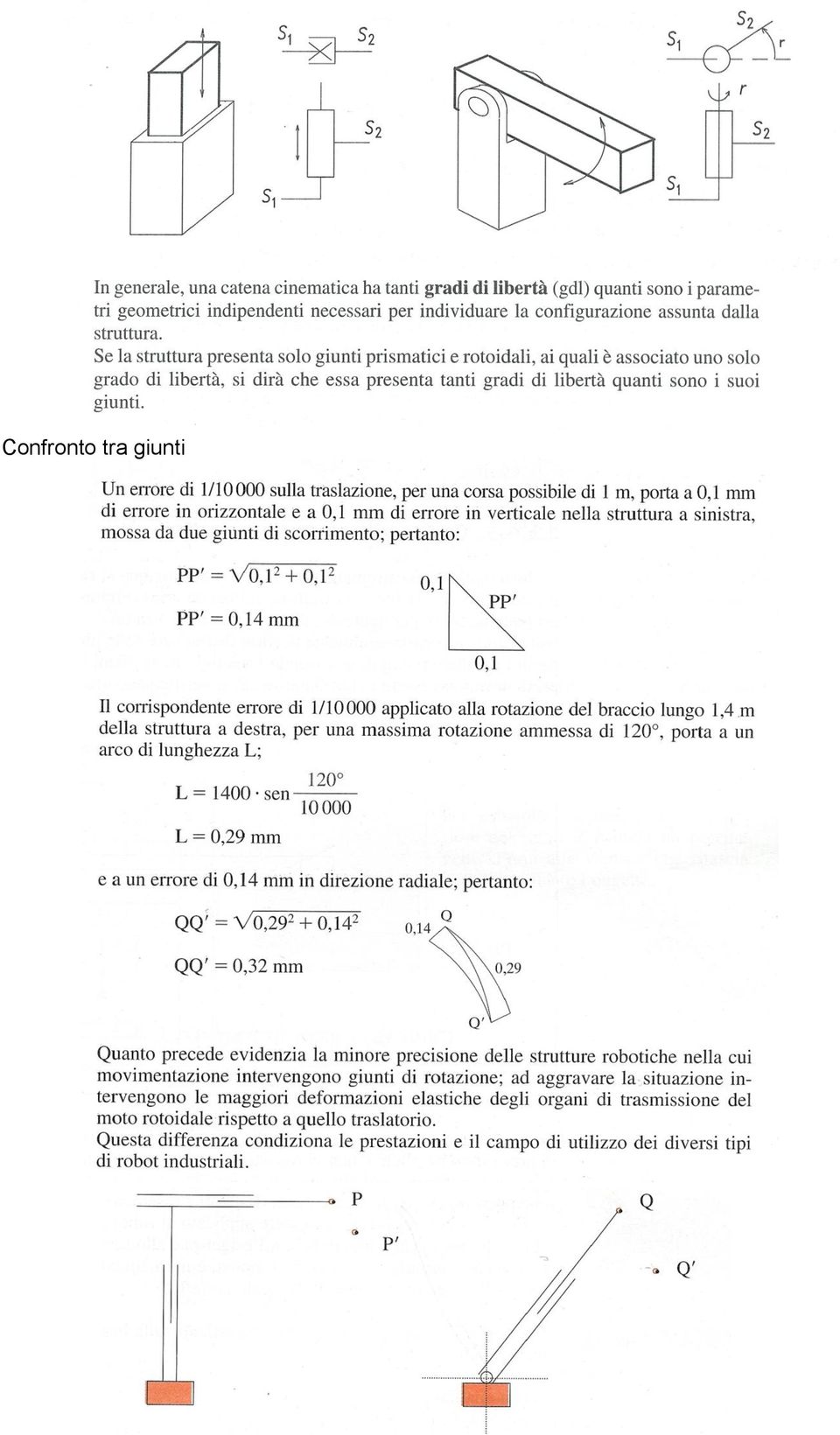
5 Confronto tra giunti
6 GRADI DI LIBERTA DEL ROBOT Si definiscono Gradi di libertà della struttura i gradi di mobilità che questa possiede, corrispondente al numero di giunti, e quindi di attuatori, corrispondenti alle movimentazioni.

7

8 LE STRUTTURE CINEMATICHE FONDAMENTALI

9 Volume di lavoro (vista laterale). PRESTAZIONI DELLE STRUTTURE CINEMATICHE FONDAMENTALI

10 Struttura TTT: i robot cartesiani si costruiscono nei tipi a montante (orizzontale e verticale) ed a portale. Nella figura sottostante sono riportati degli esempi di robot cartesiani: a) a montante orizzontale; b) a montante verticale; c) a portale. Esempio di dimensioni del campo operativo di un robot cartesiano
 a montante verticale; c) a portale.")
11 Struttura TRT:

12 Struttura RRR: molto diffusi, i robot con questa struttura sono detti anche antropomorfi perché riproducono abbastanza fedelmente le possibilità di movimento del braccio umano. I suoi segmenti e articolazioni sono identificati opportunamente come riportato nella figura 1. In pratica, tale nomenclatura viene spesso estesa anche ad altri tipi. il volume di lavoro può essere considerato. in prima approssimazione, come una porzione di sfera. La sua conformazione reale è in realtà più complessa, essendo influenzata dalle effettive possibilità di movimento dei giunti. A parità di ingombro in pianta, i robot antropomorfi consentono un maggior volume di lavoro rispetto alle altre strutture, ciò che li rende ideali per applicazioni quali la verniciatura a spruzzo e la saldatura ad arco. Nelle applicazioni di montaggio il loro posto preminente viene sempre più minacciato dai robot SCARA. Inoltre, uno stesso punto del campo operativo può essere raggiunto con diverse configurazioni della struttura, come si vede nella figura 2. L aumento delle possibilità operative è anche dovuto al fatto che è possibile raggiungere pezzi posti al di sotto del basamento. La possibilità di fissaggio a soffitto permette di annullare il già ridotto ingombro in pianta. Il punto debole è costituito dal costo elevato, superiore anche a quello della struttura cartesiana. La struttura è infatti completamente a sbalzo e deve essere accuratamente progettata. Una soluzione generalmente adottata è quella di confinare i motori dei vari giunti sulla base, ciò che richiede opportune trasmissioni meccaniche le quali, implicando giochi e vibrazioni, fanno cadere le prestazioni dinamiche. figura 1 figura 2 a) vista dall alto b) vista laterale

13 Esempio di robot articolato antropomorfo Struttura RRT: il volume di lavoro è un settore di sfera. Come il robot cilindrico, è facilmente adattabile all ambiente di lavoro perché la zona operativa viene raggiunta con lo sfilo (asse T), mentre il grosso della struttura può essere lontano. Attualmente questa struttura (la prima sul mercato, prodotta dalla statunitense Unimation, nel 1960) è limitata ad applicazioni gravose, come la saldatura a punti o la manipolazione pesante, nelle quali non è richiesta grande precisione di posizionamento o elevata ripetibilità.
 è limitata ad applicazioni gravose, come")
14 Struttura SCARA: il volume di lavoro può essere considerato in prima approssimazione come una porzione di cilindro. La compattezza è ottimale, in rapporto al volume di lavoro ricoperto. Questo robot presenta ottime prestazioni statiche (precisione e ripetibilità) e dinamiche, per cui le applicazioni tipiche sono quelle del montaggio. la maggioranza degli SCARA sono semplici ed economici, in quanto realizzati prevalentemente con 4 gradi di libertà, configurazione con la quale si possono coprire l 80% delle operazioni di montaggio. Il limite maggiore è la difficoltà ad operare in spazi angusti, ciò che rende problematico ad esempio l asservimento di macchine utensili.

15 IL CONTROLLORE ROBOTICO

16

17 NORMATIVA RELATIVA AI ROBOT ONDUSTRIALI Definizione di robot industriale (UNI 9919): si definisce robot industriale una macchina che può essere programmata per svolgere compiti che comportano azioni di manipolazione e/o di locomozione sotto comando automatico. Definizione dei robot industriali (JIRA): la classificazione è impostata su cinque livelli che seguono un ordine verso sempre maggiore complessità e potenzialità. L ordine è pertanto cronologico, nel senso che i livelli più bassi sono stati i primi ad essere introdotti nel mondo industriale; inoltre viene evidenziato il ruolo dei sensori così come è stato descritto nel paragrafo relativo. Per tutti questi motivi la classificazione proposta pare meglio impostata di quelle basate sul ruolo che il robot deve assumere, spesso non ben definito a causa della flessibilità di queste macchine.

18 Definizione dei robot industriali (SIRI): molto frequente è la classificazione funzionale, che assume a criterio la tipologia dei compiti svolti. In effetti, la tendenza iniziale (anni 60) di costruire robot universali è stata ben presto sostituita dall adozione di robot dedicati, atti a svolgere solo una classe ben definita di compiti. La SIRI distingue: 1) robot per alimentazione e scarico di macchine utensili; 2) robot per saldatura a punti e robot per saldatura continua; 3) robot per verniciatura; 4) robot per montaggio e assemblaggio; 5) robot per misura automatica; 6) robot per altre applicazioni. Citiamo altre due importanti classificazioni, utili per capire come i criteri di classificazione siano legati agli ambiti industriali in cui sono definiti: classificazione statunitense RIA (Robot Industries Association): un robot industriale è un manipolatore riprogrammabile multiscopo concepito per spostare materiali., pezzi, attrezzi od altri oggetti specifici, attraverso movimenti variamente programmabili, ed impiegato per una quantità di compiti diversi. La definizione americana è più restrittiva. Essa pone l accento su due caratteristiche fondamentali: la flessibilità e la programmabilità. Tale definizione risulta non adeguata alla realtà in quanto non considera la possibilità di interfacciamento con l ambiente di lavoro, alla capacità di controllare le apparecchiature o di sincronizzarsi con esse, ed infine di mutare, adeguandoli, i comportamenti in base ambiente esterno. Classificazione francese AFRI (Association Francaise de Robotique Industrielle): rispecchia quella giapponese, considerando quattro classi di appartenenza (A, B, C, D), non considerando la classe dei robot intelligenti.
 robot per misura automatica; 6) robot per altre applicazioni.")
19 PROGRAMMAZIONE DEI ROBOT Il robot, a differenza di qualsiasi altra macchina operatrice programmabile, può anche apprendere il proprio compito operativo. L istruzione diretta del robot è stato il primo metodo sviluppato per la programmazione dei robot industriali. Con tale metodo, chiamato teaching by showing, dopo aver preparato la stazione di lavoro ed aver selezionato il modo apprendimento, l operatore guida il braccio lungo il percorso necessario per eseguire il compito, facendogli compiere una esecuzione campione delle diverse operazioni. Le successive posizioni del braccio sono memorizzate, in modo che la macchina possa essere in grado di ripetere esattamente le stesse operazioni, semplicemente passando alla modalità automatico. Cambia, rispetto alla normale programmazione, il modo in cui il controllore robotico produce gli ordini ai servoassi (tensioni elettriche): con l auotapprendimento i segnali di comando agli attuatori sono ottenuti direttamente, elaborando le indicazioni dei sensori di posizione situati nelle articolazioni. Un linguaggio di programmazione fa invece di solito riferimento alle cosiddette coordinate del mondo di un punto di una pinza, cioè alle sue coordinate rispetto ad un sistema di riferimento (cartesiano, cilindrico, ecc.) con origine fissa in un punto opportuno della base del robot. Si pone perciò il problema della trasformazione dalle ccordinate-mondo alle coordinate-giunto, specificando per ciascun giunto l entità dello spostamento. Programmazione in autoappredimento La traiettoria può essere memorizzata in due modi: punto a punto e continua. Nell istruzione punto a punto si aziona il braccio tramite la teach-box (scatola d insegnamento), che invia i comandi ai singoli assi, conducendo l attuatore finale (endeffector) nei singoli punti di lavoro. Con la semplice pressione di un tasto vengono memorizzate le posizioni dei singoli link, ed eventuali operazioni (chiusura-apertura pinza, attesa, ecc.). La stessa procedura può essere effettuata con un joy-stick o cloche che permette un risparmio del 25%, poiché l operatore non deve preoccuparsi di quali assi muovere per raggiungere la posizione voluta. Per molte applicazioni, quali ad esempio la verniciatura, la sbavatura, l incollaggio, la saldatura continua, ecc. è importante poter controllare con continuità la traiettoria e l orientamento della mano, non solo in alcuni punti. L operatore prende per mano il robot e lo guida nel movimento e nelle operazioni. Per limitare l occupazione di memoria si utilizza il metodo dell interpolazione, che approssima gli spostamenti mediante segmenti ed archi di circonferenza. Le modalità di insegnamento sono tre: insegnamento diretto: il robot è guidato direttamente dall operatore; lo sforzo esercitato è medio leggero grazie ad un dispositivo integrato di assistenza muscolare;

20 insegnamento mediante unità specifica: l unità di insegnamento è la realizzazione in scala, ridotta del robot: l operatore gli insegna il lavoro, che verrà ripetuto dal robot vero e proprio; insegnamento per telecomando: ora il robot è direttamente asservito all unità di insegnamento, e riproduce esattamente, memorizzandoli nel modo spiegato, i gesti dell operatore. Programmazione con linguaggi specifici La semplicità del metodo teaching by showing ne giustifica la larga diffusione in ambito industriale. D altra parte, è evidente che la programmazione di compiti complessi risulta difficile. Si pensi alla programmazione delle operazioni di assemblaggio con molti pezzi o anche alla semplice programmazione di operazioni di pellettizzazione in cui si è costretti a definire tutte le posizioni degli oggetti. L adattabilità del robot è poi pressoché nulla, dato che l esecuzione del compito consiste nella semplice ripetizione di quanto appreso in fase di istruzione. L impossibilità di servirsi delle informazioni dei sensori esterni e perciò di gestire situazioni anomale o impreviste (errori di posizionamento, caduta del pezzo dalla pinza ecc.) confina l applicabilità di taler metodo ad applicazioni semplici e fortemente ripetitive. Ulteriore vantaggio è costituito dal fatto che durante le fasi di apprendimento il robot deve essere sospeso dalle attività produttive, con conseguente notevole danno economico. La programmazione con linguaggi evoluti specifici risolve le accennate difficoltà e favorisce l integrazione del robot con altri robot e macchine (FMS, ecc.). Se si aggiunge anche un programma per la gestione delle informazioni esterne, il robot acquista una certa conoscenza del mondo esterno, risulta così in grado di operare in tempo reale. Nella programmazione del robot industriale sono importanti due problemi sulla cui possibilità di soluzione conviene soffermarci: da una qualunque configurazione della struttura, il che significa che sono noti i parametri di tutti i giunti di scorrimento e rotazione, risalire alla posizione dell elemento terminale, questo viene definito problema cinematico diretto; da una qualunque posizione dell elemento terminale risalire alla configurazione della struttura, questo viene problema cinematico inverso. ORGANI DI PRESA L attutore finale, end effector o più semplicemente mano può essere realizzato in vari modi, per le operazioni che deve svolgere il robot, e con varie tecnologie identificate dall energia impiegata per la movimentazione dell organo finale: pneumatica idraulica magnetica ed elettromagnetica elettrica. ATTUATORI ROBOTICI Gli attuatori robotici sono gli stessi utilizzati nelle catene automatiche che realizzano il controllo dei movimenti, in particolare la posizione (servoazionamenti o servomeccanismi). Le tipologie si contraddistinguono per l energia impiegata: pneumatica idraulica

21 elettrica SENSORI Nei robot industriali i sensori (trasduttori) possono essere suddivisi, sulla base della loro funzione, in interni ed esterni: trasduttori interni: hanno lo scopo di rilevare i parametri relativi alla struttura robotica stessa (giunti, bracci, ecc.); trasduttori esterni: hanno lo scopo di rilevare parametri relativi al mondo esterno utili all attività del robot (sistemi di visione, sensori di prossimità, ecc.). LA SCIENZA ROBOTICA
Test, domande e problemi di Robotica industriale
 Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
Test, domande e problemi di Robotica industriale 1. Quale, tra i seguenti tipi di robot, non ha giunti prismatici? a) antropomorfo b) cilindrico c) polare d) cartesiano 2. Un volume di lavoro a forma di
TECNOLOGIA MECCANICA LE MACCHINE UTENSILI A CNC I Centri di Lavoro
 LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
LE MACCHINE UTENSILI A CNC I Centri di Lavoro Centro per l Automazione e la Meccanica Via Rainusso 138/N 41100 Modena INDICE 1 Fresatrici, Alesatrici e Centri di Lavoro pag. 2 1.1 Generalità 2 1.2 Struttura
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
Meccanica. Componenti, mobilità, strutture
 Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
Meccanica Componenti, mobilità, strutture Tipi di giunti rotazione o traslazione. Z Z GIUNTI di ROTAZIONE Z1 GIUNTO di TRASLAZIONE Z2 Tipi di link Spesso allungati Ogni geometria Componenti, mobilità,
L automazione. L automazione. Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa
 L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
L automazione 1 L automazione Insieme delle tecniche e dei metodi per sostituire o ridurre l intervento umano in un attività lavorativa Politecnico di Torino 1 Automazione delle macchine utensili (M.U.)
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
Appunti sulla Macchina di Turing. Macchina di Turing
 Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
La Qualità il Controllo ed il Collaudo della macchina utensile. Dr. Giacomo Gelmi
 La Qualità il Controllo ed il Collaudo della macchina utensile Dr. Giacomo Gelmi Che cosa è una macchina utensile? E uno spazio fisico in cui si collocano, sostenuti da adeguate strutture ed in posizioni
La Qualità il Controllo ed il Collaudo della macchina utensile Dr. Giacomo Gelmi Che cosa è una macchina utensile? E uno spazio fisico in cui si collocano, sostenuti da adeguate strutture ed in posizioni
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC.
 Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
Gestione dei segnali analogici nei sistemi di automazione industriale con PLC. Nelle automazioni e nell industria di processo si presenta spesso il problema di gestire segnali analogici come temperature,
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO
 ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO vittorio.scialla@strumentiperleaziende.com Attuatore per traiettorie non lineari dotato di
ESTRATTO ATTUATORE CON VITE SENZA FINE PER TRAIETTORIE NON LINEARI E ALZACRISTALLI REALIZZATO CON IL MEDESIMO vittorio.scialla@strumentiperleaziende.com Attuatore per traiettorie non lineari dotato di
Con il termine programma Teacch si intende l organizzazione dei servizi per persone autistiche realizzato nella Carolina del Nord, che prevede una
 IL PROGRAMMA TEACCH Con il termine programma Teacch si intende l organizzazione dei servizi per persone autistiche realizzato nella Carolina del Nord, che prevede una presa in carico globale in senso sia
IL PROGRAMMA TEACCH Con il termine programma Teacch si intende l organizzazione dei servizi per persone autistiche realizzato nella Carolina del Nord, che prevede una presa in carico globale in senso sia
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994. Specializzazione: Meccanica
 ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
ITIS E. FERMI DESIO AREA DI PROGETTO D.M. 09/03/1994 Specializzazione: Meccanica L area di progetto E nata dalla necessità di contribuire alla formazione dei nuovi profili professionali, indicati dal Ministero
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
ROBOT CARTESIANI. Abbiamo 9 modelli di robot cartesiani che possono essere forniti in 3 tipologie diverse:
 ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
ROBOT ROBOT CARTESIANI Apiel realizza un ampia gamma di robot cartesiani da 2 a 6 assi per la movimentazione di oggetti con massa variabile da 2Kg fino a 100Kg con aree operative che arrivano a 20 metri
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
SENSORI E TRASDUTTORI
 SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
SENSORI E TRASDUTTORI Il controllo di processo moderno utilizza tecnologie sempre più sofisticate, per minimizzare i costi e contenere le dimensioni dei dispositivi utilizzati. Qualsiasi controllo di processo
Lo stoccaggio dei materiali può avvenire sia a terra si su apposite attrezzature: gli scaffali.
 Mezzi di warehousing Le attrezzature per lo stoccaggio comprendono tutti i mezzi che non possono seguire il materiale durante i suoi movimenti. Si tratta quindi di "mezzi fissi", cioè di attrezzature facenti
Mezzi di warehousing Le attrezzature per lo stoccaggio comprendono tutti i mezzi che non possono seguire il materiale durante i suoi movimenti. Si tratta quindi di "mezzi fissi", cioè di attrezzature facenti
INDICE. Assessorato turismo, sport, commercio e trasporti Infrastrutture funiviarie
 INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
INDICE 1 CARATTERISTICHE GENERALI DEGLI IMPIANTI A FUNE... 2 1.1 Definizione di impianto a fune... 2 1.2 Tipologie di impianto... 3 1.3 Funzionamento degli impianti a fune... 6 1.4 Normativa per la costruzione
IL MARKETING E QUELLA FUNZIONE D IMPRESA CHE:
 IL MARKETING E QUELLA FUNZIONE D IMPRESA CHE:! definisce i bisogni e i desideri insoddisfatti! ne definisce l ampiezza! determina quali mercati obiettivo l impresa può meglio servire! definisce i prodotti
IL MARKETING E QUELLA FUNZIONE D IMPRESA CHE:! definisce i bisogni e i desideri insoddisfatti! ne definisce l ampiezza! determina quali mercati obiettivo l impresa può meglio servire! definisce i prodotti
ESERCITAZIONE Scrittura di un programma CNC per la fresatura di un componente dato
 ESERCITAZIONE Scrittura di un programma CNC per la fresatura di un componente dato Nella presente esercitazione si redige il programma CNC per la fresatura del pezzo illustrato nelle Figure 1 e 2. Figura
ESERCITAZIONE Scrittura di un programma CNC per la fresatura di un componente dato Nella presente esercitazione si redige il programma CNC per la fresatura del pezzo illustrato nelle Figure 1 e 2. Figura
Sensori a effetto Hall bipolari con ritenuta stabilizzati e non stabilizzati con circuito chopper
 Sensori a effetto Hall bipolari con ritenuta stabilizzati e non stabilizzati con circuito chopper I risultati dei test mostrano che è possibile ottenere prestazioni significativamente maggiori impiegando
Sensori a effetto Hall bipolari con ritenuta stabilizzati e non stabilizzati con circuito chopper I risultati dei test mostrano che è possibile ottenere prestazioni significativamente maggiori impiegando
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM B DL CIM A Il Computer Integrated Manufacturing (CIM) è un metodo
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 11 Macchine utensili e controllo numerico Programmazione CNC Università degli Studi di Bergamo, Automazione Industriale, A.A. 2015/2016, A. L. Cologni 1 Introduzione
COMANDI PER CICLI. Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita.
 che evolvono secondo una sequenza prestabilita.") COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
COMANDI PER CICLI Ciclo: un insieme di operazioni (movimentazioni, ecc.) che evolvono secondo una sequenza prestabilita. Tipologie di comandi per cicli: 1. MANUALI o ARBITRARI : ogni azione della sequenza
PROGETTO DI 18.05.2006 COMUNICAZIONE DELLA COMMISSIONE. relativa alla revisione delle modalità di fissazione dei tassi di riferimento
 IT PROGETTO DI 18.05.2006 COMUNICAZIONE DELLA COMMISSIONE relativa alla revisione delle modalità di fissazione dei tassi di riferimento 1. TASSI DI RIFERIMTO E TASSI DI ATTUALIZZAZIONE Nell ambito del
IT PROGETTO DI 18.05.2006 COMUNICAZIONE DELLA COMMISSIONE relativa alla revisione delle modalità di fissazione dei tassi di riferimento 1. TASSI DI RIFERIMTO E TASSI DI ATTUALIZZAZIONE Nell ambito del
PROCESSI PRODUTTIVI E LOGISTICA I.T.S.T J.F. KENNEDY - PN
 PROCESSI PRODUTTIVI E LOGISTICA I.T.S.T J.F. KENNEDY - PN A.S. 2014/15 Innovazione e ciclo di vita di un prodotto La progettazione di un prodotto e di conseguenza il suo processo produttivo dipende dalla
PROCESSI PRODUTTIVI E LOGISTICA I.T.S.T J.F. KENNEDY - PN A.S. 2014/15 Innovazione e ciclo di vita di un prodotto La progettazione di un prodotto e di conseguenza il suo processo produttivo dipende dalla
I sistemi di controllo possono essere distinti in due categorie: sistemi ad anello aperto e sistemi ad anello chiuso:
 3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
3.1 GENERALITÀ Per sistema di controllo si intende un qualsiasi sistema in grado di fare assumere alla grandezza duscita un prefissato andamento in funzione della grandezza di ingresso, anche in presenza
Come parti. - Parti solide (piene o di superfici): - Parti composite - Parti in lamiera. Come assiemi - Di progetto - Scambio componenti - Verifica
: - Parti composite - Parti in lamiera. Come assiemi - Di progetto - Scambio componenti - Verifica") PTC Pro/ENGINEER Pro/ENGINEER è un programma CAD che consente di sviluppare modelli solidi in ambiente tridimensionale, su sistemi operativi Windows e Unix sia a 32 bit che a 64 bit. Essendo un programma
PTC Pro/ENGINEER Pro/ENGINEER è un programma CAD che consente di sviluppare modelli solidi in ambiente tridimensionale, su sistemi operativi Windows e Unix sia a 32 bit che a 64 bit. Essendo un programma
Alla ricerca dell algoritmo. Scoprire e formalizzare algoritmi.
 PROGETTO SeT Il ciclo dell informazione Alla ricerca dell algoritmo. Scoprire e formalizzare algoritmi. Scuola media Istituto comprensivo di Fagagna (Udine) Insegnanti referenti: Guerra Annalja, Gianquinto
PROGETTO SeT Il ciclo dell informazione Alla ricerca dell algoritmo. Scoprire e formalizzare algoritmi. Scuola media Istituto comprensivo di Fagagna (Udine) Insegnanti referenti: Guerra Annalja, Gianquinto
La gestione di un calcolatore. Sistemi Operativi primo modulo Introduzione. Sistema operativo (2) Sistema operativo (1)
 Sistema operativo (1)") La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
modulog Combinazioni di moduli per la tecnica della manipolazione
 modulog Combinazioni di moduli per la tecnica della manipolazione Facile gestione di carichi pesanti - un valore aggiunto per la produttività La manipolazione ed il montaggio manuale di carichi pesanti
modulog Combinazioni di moduli per la tecnica della manipolazione Facile gestione di carichi pesanti - un valore aggiunto per la produttività La manipolazione ed il montaggio manuale di carichi pesanti
LO SVILUPPO DELLE COMPETENZE RELAZIONALI DEL PERSONALE INTERNO A CONTATTO CON IL CLIENTE
 LO SVILUPPO DELLE COMPETENZE RELAZIONALI DEL PERSONALE INTERNO A CONTATTO CON IL CLIENTE La qualità del servizio passa attraverso la qualità delle persone 1. Lo scenario In presenza di una concorrenza
LO SVILUPPO DELLE COMPETENZE RELAZIONALI DEL PERSONALE INTERNO A CONTATTO CON IL CLIENTE La qualità del servizio passa attraverso la qualità delle persone 1. Lo scenario In presenza di una concorrenza
STRUMENTAZIONE GEOTECNICA DI MONITORAGGIO. ovvero Strumentazione geotecnica tradizionale utilizzata per il monitoraggio dei movimenti franosi
 5 maggio 2005 - Corso di Laboratorio Monitoraggio Frane STRUMENTAZIONE GEOTECNICA DI MONITORAGGIO ovvero Strumentazione geotecnica tradizionale utilizzata per il monitoraggio dei movimenti franosi FINALITA
5 maggio 2005 - Corso di Laboratorio Monitoraggio Frane STRUMENTAZIONE GEOTECNICA DI MONITORAGGIO ovvero Strumentazione geotecnica tradizionale utilizzata per il monitoraggio dei movimenti franosi FINALITA
Scopo della lezione. Informatica. Informatica - def. 1. Informatica
 Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Come valutare le caratteristiche aerobiche di ogni singolo atleta sul campo
 Come valutare le caratteristiche aerobiche di ogni singolo atleta sul campo Prima di organizzare un programma di allenamento al fine di elevare il livello di prestazione, è necessario valutare le capacità
Come valutare le caratteristiche aerobiche di ogni singolo atleta sul campo Prima di organizzare un programma di allenamento al fine di elevare il livello di prestazione, è necessario valutare le capacità
Fresatrice a montante mobile di costruzione MAKE mod. ALTAIR 130/160/200 doppia colonna e testa centrale (sistema box in box)
") Fresatrice a montante mobile di costruzione MAKE mod. ALTAIR 130/160/200 doppia colonna e testa centrale (sistema box in box) MAKE è nata in parte dall esperienza di tecnici di progettazione, valorizzando
Fresatrice a montante mobile di costruzione MAKE mod. ALTAIR 130/160/200 doppia colonna e testa centrale (sistema box in box) MAKE è nata in parte dall esperienza di tecnici di progettazione, valorizzando
Project Cycle Management
 Project Cycle Management Tre momenti centrali della fase di analisi: analisi dei problemi, analisi degli obiettivi e identificazione degli ambiti di intervento Il presente materiale didattico costituisce
Project Cycle Management Tre momenti centrali della fase di analisi: analisi dei problemi, analisi degli obiettivi e identificazione degli ambiti di intervento Il presente materiale didattico costituisce
DIMENSIONI CRITERI INDICATORI
 Allegato 4 - Manerbio META EDUCATIVA: autonomia in ambito scolastico (classe 4/5 scuola primaria) DIMENSIONI CRITERI INDICATORI GESTIONALE OPERATIVA Uso degli strumenti Conoscere gli strumenti necessari
Allegato 4 - Manerbio META EDUCATIVA: autonomia in ambito scolastico (classe 4/5 scuola primaria) DIMENSIONI CRITERI INDICATORI GESTIONALE OPERATIVA Uso degli strumenti Conoscere gli strumenti necessari
L ANALISI ABC PER LA GESTIONE DEL MAGAZZINO
 L ANALISI ABC PER LA GESTIONE DEL MAGAZZINO È noto che la gestione del magazzino è uno dei costi nascosti più difficili da analizzare e, soprattutto, da contenere. Le nuove tecniche hanno, però, permesso
L ANALISI ABC PER LA GESTIONE DEL MAGAZZINO È noto che la gestione del magazzino è uno dei costi nascosti più difficili da analizzare e, soprattutto, da contenere. Le nuove tecniche hanno, però, permesso
Programmi e Oggetti Software
 Corso di Laurea Ingegneria Civile Elementi di Informatica Programmi e Oggetti Software Settembre 2006 Programmi e Oggetti Software 1 Contenuti Cosa è un programma Cosa significa programmare Il punto di
Corso di Laurea Ingegneria Civile Elementi di Informatica Programmi e Oggetti Software Settembre 2006 Programmi e Oggetti Software 1 Contenuti Cosa è un programma Cosa significa programmare Il punto di
Componenti per la robotica: Generalità e Attuatori
 Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Corso di Robotica 1 Componenti per la robotica: Generalità e Attuatori Prof. Alessandro De Luca Robotica 1 1 Robot come sistema programma di lavoro comandi Robot azioni ambiente di lavoro organi meccanici
Classificazione dei Sensori. (raccolta di lucidi)
") Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Classificazione dei Sensori (raccolta di lucidi) 1 Le grandezze fisiche da rilevare nei processi industriali possono essere di varia natura; generalmente queste quantità sono difficili da trasmettere e
Cap 12 12 -- Misure di vi braz di vi ioni
 Cap 12 - Misure di vibrazioni Le vibrazioni sono poi da sempre uno strumento di diagnostica di macchine e sistemi meccanici 1 Le direttive CEE 89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE, obbliga tutti
Cap 12 - Misure di vibrazioni Le vibrazioni sono poi da sempre uno strumento di diagnostica di macchine e sistemi meccanici 1 Le direttive CEE 89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE, obbliga tutti
Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei patrimoni
 CONVEGNO FACILITY MANAGEMENT: LA GESTIONE INTEGRATA DEI PATRIMONI PUBBLICI GENOVA FACOLTA DI ARCHITETTURA 06.07.2010 Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei
CONVEGNO FACILITY MANAGEMENT: LA GESTIONE INTEGRATA DEI PATRIMONI PUBBLICI GENOVA FACOLTA DI ARCHITETTURA 06.07.2010 Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei
Il controllo della visualizzazione
 Capitolo 3 Il controllo della visualizzazione Per disegnare in modo preciso è necessario regolare continuamente l inquadratura in modo da vedere la parte di disegno che interessa. Saper utilizzare gli
Capitolo 3 Il controllo della visualizzazione Per disegnare in modo preciso è necessario regolare continuamente l inquadratura in modo da vedere la parte di disegno che interessa. Saper utilizzare gli
Sommario. Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi.
 Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
SOLO I CARRELLI TOYOTA CON SAS SANNO COME
 SOLO I CARRELLI TOYOTA CON SAS SANNO COME www.toyota-forklifts.it ABBATTERE I COSTI I carrelli elevatori Toyota equipaggiati con il sistema SAS utilizzano una tecnologia intelligente per ridurre sia i
SOLO I CARRELLI TOYOTA CON SAS SANNO COME www.toyota-forklifts.it ABBATTERE I COSTI I carrelli elevatori Toyota equipaggiati con il sistema SAS utilizzano una tecnologia intelligente per ridurre sia i
Programmazione Fondi Strutturali 2007/2013 P.O.N. FSE A.S. 2013/2014 SCHEDA PROGETTUALE MODULO MECCANICA, MECCATRONICA, ENERGIA
 ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
ISTITUTO ISTRUZIONE SECONDARIA SUPERIORE GUGLIELMO MARCONI Piazza Poerio 2, 70126 Bari - Tel.080-5534450 Fax.080-5559037 - www.marconibari.it - info@marconibari.it Programmazione Fondi Strutturali 2007/2013
Ventilazione del locale di carica carrelli elevatori
 Ventilazione del locale di carica carrelli elevatori In ambito industriale è ormai consolidato l uso di carrelli elevatori elettrici. Queste macchine sono corredate di un gruppo batterie ricaricabili che
Ventilazione del locale di carica carrelli elevatori In ambito industriale è ormai consolidato l uso di carrelli elevatori elettrici. Queste macchine sono corredate di un gruppo batterie ricaricabili che
Esame sezione Brevetti 2003-2004 Prova Pratica di meccanica
 Esame sezione Brevetti 2003-2004 Prova Pratica di meccanica OGGETVO: Brevettazione dl un perfezionamento riguardante I pressatori per mescolatori dl gomma Egregio dottore, Le invio una breve relazione
Esame sezione Brevetti 2003-2004 Prova Pratica di meccanica OGGETVO: Brevettazione dl un perfezionamento riguardante I pressatori per mescolatori dl gomma Egregio dottore, Le invio una breve relazione
SCIENZE E TECNOLOGIA
 SCIENZE E TECNOLOGIA COMPETENZE Dimostra conoscenze scientifico-tecnologiche che gli consentono di analizzare dati e fatti della realtà e di verificare l'attendibilità delle analisi quantitative e statistiche
SCIENZE E TECNOLOGIA COMPETENZE Dimostra conoscenze scientifico-tecnologiche che gli consentono di analizzare dati e fatti della realtà e di verificare l'attendibilità delle analisi quantitative e statistiche
PROGRAMMAZIONE DIDATTICA ANNUALE. SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica
 ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
ISTITUTO TECNICO INDUSTRIALE STATALE Basilio Focaccia via Monticelli (loc. Fuorni) - Salerno PROGRAMMAZIONE DIDATTICA ANNUALE SETTORE TECNOLOGICO Indirizzo: Elettrotecnica ed Elettronica Anno scolastico:
Tempi e metodi nelle lavorazioni
 Tempi e metodi nelle lavorazioni Importanza del tempo nella produzione. Il tempo necessario alla produzione di un bene riveste, per l impresa, un ruolo fondamentale per: - determinazione della sua capacità
Tempi e metodi nelle lavorazioni Importanza del tempo nella produzione. Il tempo necessario alla produzione di un bene riveste, per l impresa, un ruolo fondamentale per: - determinazione della sua capacità
PLC Programmable Logic Controller
 PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
TECNICA DELLE COSTRUZIONI: PROGETTO DI STRUTTURE LE FONDAZIONI
 LE FONDAZIONI Generalità sulle fondazioni Fondazioni dirette Plinti isolati Trave rovescia Esecutivi di strutture di fondazione Generalità Le opere di fondazione hanno il compito di trasferire le sollecitazioni
LE FONDAZIONI Generalità sulle fondazioni Fondazioni dirette Plinti isolati Trave rovescia Esecutivi di strutture di fondazione Generalità Le opere di fondazione hanno il compito di trasferire le sollecitazioni
CASE STORY 4 IMPLEMENTAZIONE EXPERIOR IMPIANTO P3
 Oggetto: IMPLEMENTAZIONE PACCHETTO EXPERIOR SU UN SOLLEVAMENTO FOGNARIO DI ESISTENTE DENOMINATO P3 PREMESSA L impianto in oggetto è gestito da Tecnocasic, società per azioni controllata dal CACIP, operante
Oggetto: IMPLEMENTAZIONE PACCHETTO EXPERIOR SU UN SOLLEVAMENTO FOGNARIO DI ESISTENTE DENOMINATO P3 PREMESSA L impianto in oggetto è gestito da Tecnocasic, società per azioni controllata dal CACIP, operante
La Leadership. Salvatore Savarese
 La Leadership Salvatore Savarese 1 Introduzione Lavorare all interno di organizzazioni induce un evoluzione professionale ed umana in più direzioni: aumentano le competenze tecniche specifiche, si sviluppano
La Leadership Salvatore Savarese 1 Introduzione Lavorare all interno di organizzazioni induce un evoluzione professionale ed umana in più direzioni: aumentano le competenze tecniche specifiche, si sviluppano
La manutenzione come elemento di garanzia della sicurezza di macchine e impianti
 La manutenzione come elemento di garanzia della sicurezza di macchine e impianti Alessandro Mazzeranghi, Rossano Rossetti MECQ S.r.l. Quanto è importante la manutenzione negli ambienti di lavoro? E cosa
La manutenzione come elemento di garanzia della sicurezza di macchine e impianti Alessandro Mazzeranghi, Rossano Rossetti MECQ S.r.l. Quanto è importante la manutenzione negli ambienti di lavoro? E cosa
Picking. Contenuto della lezione
 Picking Contenuto della lezione Introduzione Picking manuale Picking automatizzato Conclusioni Politecnico di Torino Pagina 1 di 14 Obiettivi della lezione Panoramica sulle soluzioni impiantistiche di
Picking Contenuto della lezione Introduzione Picking manuale Picking automatizzato Conclusioni Politecnico di Torino Pagina 1 di 14 Obiettivi della lezione Panoramica sulle soluzioni impiantistiche di
Liceo Tecnologico. Indirizzo Elettrico Elettronico. Indicazioni nazionali per Piani di Studi Personalizzati
 Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
Indicazioni nazionali per Piani di Studi Personalizzati Obiettivi Specifici d Apprendimento Discipline con attività di laboratorio 3 4 5 Fisica 99 Gestione di progetto 132 99 *Tecnologie informatiche e
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
10 - CURVE DI LIVELLO
 10 - CURVE DI LIVELLO La rappresentazione del territorio mediante CURVE DI LIVELLO è stata da sempre la soluzione ideale adottata dai topografi al fine di visualizzare in maniera efficace l andamento orografico
10 - CURVE DI LIVELLO La rappresentazione del territorio mediante CURVE DI LIVELLO è stata da sempre la soluzione ideale adottata dai topografi al fine di visualizzare in maniera efficace l andamento orografico
SPC e distribuzione normale con Access
 SPC e distribuzione normale con Access In questo articolo esamineremo una applicazione Access per il calcolo e la rappresentazione grafica della distribuzione normale, collegata con tabelle di Clienti,
SPC e distribuzione normale con Access In questo articolo esamineremo una applicazione Access per il calcolo e la rappresentazione grafica della distribuzione normale, collegata con tabelle di Clienti,
PALLETTIZZAZATORI E FINE LINEA
 PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
PALLETTIZZAZATORI E FINE LINEA Solaut produce pallettizzatori cartesiani per soddisfare le più svariate esigenze della clientela. Abbiamo 13 modelli base che possiamo realizzare con caratteristiche diverse
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
PRINCIPI DI TRASDUZIONE
 PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
PRINCIPI DI TRASDUZIONE Passiva Trasduzione resistiva Trasduzione capacitiva Trasduzione induttiva Attiva Trasduzione fotovoltaica Trasduzione piezoelettrica Trasduzione elettromagnetica Trasduzione fotoconduttiva
SCUOLA PRIMARIA OBIETTIVI DI APPRENDIMENTO
 SCUOLA PRIMARIA TECNOLOGIA classe 1^ COMPETENZE CHIAVE Competenza in campo scientifico-tecnologico Competenza digitale Imparare a imparare TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE L alunno: riconosce
SCUOLA PRIMARIA TECNOLOGIA classe 1^ COMPETENZE CHIAVE Competenza in campo scientifico-tecnologico Competenza digitale Imparare a imparare TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE L alunno: riconosce
come nasce una ricerca
 PSICOLOGIA SOCIALE lez. 2 RICERCA SCIENTIFICA O SENSO COMUNE? Paola Magnano paola.magnano@unikore.it ricevimento: martedì ore 10-11 c/o Studio 16, piano -1 PSICOLOGIA SOCIALE COME SCIENZA EMPIRICA le sue
PSICOLOGIA SOCIALE lez. 2 RICERCA SCIENTIFICA O SENSO COMUNE? Paola Magnano paola.magnano@unikore.it ricevimento: martedì ore 10-11 c/o Studio 16, piano -1 PSICOLOGIA SOCIALE COME SCIENZA EMPIRICA le sue
SECONDO BIENNIO ISTITUTO TECNICO
 SETTORE DOCUMENTI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE ELETTROTECNICA TECNOLOGICO ELETTRONICA ED ELETTROTECNICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento,
SETTORE DOCUMENTI PER LA DISCUSSIONE ISTITUTO TECNICO INDIRIZZO ARTICOLAZIONE ELETTROTECNICA TECNOLOGICO ELETTRONICA ED ELETTROTECNICA ESITI DI APPRENDIMENTO (competenze, abilità, conoscenze) Regolamento,
V= R*I. LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro.
 LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
LEGGE DI OHM Dopo aver illustrato le principali grandezze elettriche è necessario analizzare i legami che vi sono tra di loro. PREMESSA: Anche intuitivamente dovrebbe a questo punto essere ormai chiaro
Siamo così arrivati all aritmetica modulare, ma anche a individuare alcuni aspetti di come funziona l aritmetica del calcolatore come vedremo.
 DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
DALLE PESATE ALL ARITMETICA FINITA IN BASE 2 Si è trovato, partendo da un problema concreto, che con la base 2, utilizzando alcune potenze della base, operando con solo addizioni, posso ottenere tutti
Mon Ami 3000 Provvigioni agenti Calcolo delle provvigioni per agente / sub-agente
 Prerequisiti Mon Ami 3000 Provvigioni agenti Calcolo delle provvigioni per agente / sub-agente L opzione Provvigioni agenti è disponibile per le versioni Vendite, Azienda Light e Azienda Pro. Introduzione
Prerequisiti Mon Ami 3000 Provvigioni agenti Calcolo delle provvigioni per agente / sub-agente L opzione Provvigioni agenti è disponibile per le versioni Vendite, Azienda Light e Azienda Pro. Introduzione
JUDO COME EDUCAZIONE MOTORIA
 JUDO COME EDUCAZIONE MOTORIA L età d oro della motricità La prima età scolare DAI 6 AI 10 ANNI Tratti dominante del comportamento motorio per i bambini dai 6 ai 10 anni Notevole vivacità Bisogno di imitazione
JUDO COME EDUCAZIONE MOTORIA L età d oro della motricità La prima età scolare DAI 6 AI 10 ANNI Tratti dominante del comportamento motorio per i bambini dai 6 ai 10 anni Notevole vivacità Bisogno di imitazione
1. Definizione di budget e collocazione nel processo di programmazione e controllo
 21 Capitolo II Il budget 1. Definizione di budget e collocazione nel processo di programmazione e controllo Il budget - e' un programma delle operazioni di gestione da compiere in un anno, finalizzato
21 Capitolo II Il budget 1. Definizione di budget e collocazione nel processo di programmazione e controllo Il budget - e' un programma delle operazioni di gestione da compiere in un anno, finalizzato
Le macchine elettriche
 Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
Le macchine elettriche Cosa sono le macchine elettriche? Le macchine elettriche sono dispositivi atti a: convertire energia elettrica in energia meccanica; convertire energia meccanica in energia elettrica;
ELEVATORI PER NASTRI
 NASTRI TRASPORTATORI ELEVATORI PER NASTRI ELEVATORE CONTINUO A RIPIANI Per le esigenze di trasporto in verticale realizziamo elevatori verticali a piano fisso. Queste apparecchiature svolgono sia la funzione
NASTRI TRASPORTATORI ELEVATORI PER NASTRI ELEVATORE CONTINUO A RIPIANI Per le esigenze di trasporto in verticale realizziamo elevatori verticali a piano fisso. Queste apparecchiature svolgono sia la funzione
SCELTA DELL APPROCCIO. A corredo delle linee guida per l autovalutazione e il miglioramento
 SCELTA DELL APPROCCIO A corredo delle linee guida per l autovalutazione e il miglioramento 1 SCELTA DELL APPROCCIO l approccio all autovalutazione diffusa può essere normale o semplificato, a seconda delle
SCELTA DELL APPROCCIO A corredo delle linee guida per l autovalutazione e il miglioramento 1 SCELTA DELL APPROCCIO l approccio all autovalutazione diffusa può essere normale o semplificato, a seconda delle
1 PREMESSE E SCOPI... 3 2 DESCRIZIONE DEI SUPPORTI SOTTOPOSTI A PROVA... 3 3 PROGRAMMA DELLE PROVE SPERIMENTALI... 5
 DI UN SISTEMA DI FISSAGGIO PER FACCIATE CONTINUE 2 INDICE 1 PREMESSE E SCOPI... 3 2 DESCRIZIONE DEI SUPPORTI SOTTOPOSTI A PROVA... 3 3 PROGRAMMA DELLE PROVE SPERIMENTALI... 5 3.1 STRUMENTAZIONE UTILIZZATA...
DI UN SISTEMA DI FISSAGGIO PER FACCIATE CONTINUE 2 INDICE 1 PREMESSE E SCOPI... 3 2 DESCRIZIONE DEI SUPPORTI SOTTOPOSTI A PROVA... 3 3 PROGRAMMA DELLE PROVE SPERIMENTALI... 5 3.1 STRUMENTAZIONE UTILIZZATA...
La propagazione delle onde luminose può essere studiata per mezzo delle equazioni di Maxwell. Tuttavia, nella maggior parte dei casi è possibile
 Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
Elementi di ottica L ottica si occupa dello studio dei percorsi dei raggi luminosi e dei fenomeni legati alla propagazione della luce in generale. Lo studio dell ottica nella fisica moderna si basa sul
ASPETTI OPERATIVI TASI. Tabella comuni La tabelle è stata implementata con diversi campi e prospetti utili allo sviluppo calcolo della TASI.
 ASPETTI OPERATIVI TASI Tabella comuni La tabelle è stata implementata con diversi campi e prospetti utili allo sviluppo calcolo della TASI. Data pubblicazione delibera Aliq./Detr. TASI questo campo è fondamentale
ASPETTI OPERATIVI TASI Tabella comuni La tabelle è stata implementata con diversi campi e prospetti utili allo sviluppo calcolo della TASI. Data pubblicazione delibera Aliq./Detr. TASI questo campo è fondamentale
LEZIONI N 24 E 25 UNIONI SALDATE
 LEZIONI N 24 E 25 UNIONI SALDATE Le saldature si realizzano prevalentemente con il metodo dell arco elettrico, utilizzando elettrodi rivestiti, che forniscono il materiale di apporto. Il collegamento è
LEZIONI N 24 E 25 UNIONI SALDATE Le saldature si realizzano prevalentemente con il metodo dell arco elettrico, utilizzando elettrodi rivestiti, che forniscono il materiale di apporto. Il collegamento è
SCUOLA SECONDARIA DI PRIMO GRADO
 GEOGRAFIA SCUOLA SECONDARIA DI PRIMO GRADO Paesaggio Capire che cos è la geografia e di che cosa si occupa. Saper distinguere tra geografia fisica e umana. Capire il mondo in cui viviamo attraverso le
GEOGRAFIA SCUOLA SECONDARIA DI PRIMO GRADO Paesaggio Capire che cos è la geografia e di che cosa si occupa. Saper distinguere tra geografia fisica e umana. Capire il mondo in cui viviamo attraverso le
La roulette dei bagagli di Maria Altieri
 La roulette dei bagagli di Maria Altieri Autore Maria Altieri Referente scientifico Michela Mayer Grado scolastico Scuola Secondaria di II grado Percorso collegato Il moto: velocità ed accelerazione Nucleo
La roulette dei bagagli di Maria Altieri Autore Maria Altieri Referente scientifico Michela Mayer Grado scolastico Scuola Secondaria di II grado Percorso collegato Il moto: velocità ed accelerazione Nucleo
Guida Rapida di Syncronize Backup
 Guida Rapida di Syncronize Backup 1) SOMMARIO 2) OPZIONI GENERALI 3) SINCRONIZZAZIONE 4) BACKUP 1) - SOMMARIO Syncronize Backup è un software progettato per la tutela dei dati, ed integra due soluzioni
Guida Rapida di Syncronize Backup 1) SOMMARIO 2) OPZIONI GENERALI 3) SINCRONIZZAZIONE 4) BACKUP 1) - SOMMARIO Syncronize Backup è un software progettato per la tutela dei dati, ed integra due soluzioni
Agenzia Regionale di Protezione Civile &!!
 Agenzia Regionale di Protezione Civile!!!"#$ % &!! '()* &+#),) Ascoltiamo un po. Parole chiave di Velasco Motivazione Mentalità vincente Esercizio Impegno Adattamento Flessibilità Punti in comune. Quali
Agenzia Regionale di Protezione Civile!!!"#$ % &!! '()* &+#),) Ascoltiamo un po. Parole chiave di Velasco Motivazione Mentalità vincente Esercizio Impegno Adattamento Flessibilità Punti in comune. Quali
DISEGNO TECNICO INDUSTRIALE
 DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
DISEGNO TECNICO INDUSTRIALE COSTRUZIONI GEOMETRICHE Anno Accademico 2014-2015 Le Costruzioni Geometriche Nello studio del disegno tecnico, inteso come linguaggio grafico comune fra i tecnici per la progettazione
3 PROVE MECCANICHE DEI MATERIALI METALLICI
 3 PROVE MECCANICHE DEI MATERIALI METALLICI 3.1 Prova di trazione 3.1.3 Estensimetri La precisione e la sensibilità dello strumento variano a seconda dello scopo cui esso è destinato. Nella prova di trazione
3 PROVE MECCANICHE DEI MATERIALI METALLICI 3.1 Prova di trazione 3.1.3 Estensimetri La precisione e la sensibilità dello strumento variano a seconda dello scopo cui esso è destinato. Nella prova di trazione
METODO PER LA DESCRIZIONE DEL CAMPO MAGNETICO ROTANTE
 Ing. ENRICO BIAGI Docente di Tecnologie elettrice, Disegno, Progettazione ITIS A. Volta - Perugia ETODO PER LA DESCRIZIONE DEL CAPO AGNETICO ROTANTE Viene illustrato un metodo analitico-grafico per descrivere
Ing. ENRICO BIAGI Docente di Tecnologie elettrice, Disegno, Progettazione ITIS A. Volta - Perugia ETODO PER LA DESCRIZIONE DEL CAPO AGNETICO ROTANTE Viene illustrato un metodo analitico-grafico per descrivere
Automazione e controllo
 Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
Automazione e controllo Argomento MACCHINE Equipaggiamenti elettrici e quadri a bordo macchina: progettazione e realizzazione Esporre le principali direttive e normative del settore. Illustrare una metodologia
EasyLoad. EasyLoad RACCOLTA APPLICAZIONI. Sistemi di Asservimento per CMM SISTEMI MANUALI SISTEMI AUTOMATICI. www.moden.it SU CMM A PORTALE
 Sistemi di Asservimento per CMM EasyLoad SISTEMI MANUALI PER CONTROLLI DI LABORATORIO SU CMM A PORTALE SISTEMI AUTOMATICI PER CONTROLLI IN LINEA SU ROBOT DI MISURA www.moden.it SISTEMA DI CARICO-SCARICO
Sistemi di Asservimento per CMM EasyLoad SISTEMI MANUALI PER CONTROLLI DI LABORATORIO SU CMM A PORTALE SISTEMI AUTOMATICI PER CONTROLLI IN LINEA SU ROBOT DI MISURA www.moden.it SISTEMA DI CARICO-SCARICO
Università degli Studi di Messina
 Università degli Studi di Messina Guida alla Rendicontazione on-line delle Attività del Docente Versione della revisione: 2.02/2013-07 A cura di: Fabio Adelardi Università degli studi di Messina Centro
Università degli Studi di Messina Guida alla Rendicontazione on-line delle Attività del Docente Versione della revisione: 2.02/2013-07 A cura di: Fabio Adelardi Università degli studi di Messina Centro
Mon Ami 3000 Produzione interna/esterna Gestione della produzione interna/esterna
 Mon Ami 3000 Produzione interna/esterna Gestione della produzione interna/esterna Introduzione Questa guida illustra tutte le funzioni e le procedure da eseguire per gestire correttamente un ciclo di produzione
Mon Ami 3000 Produzione interna/esterna Gestione della produzione interna/esterna Introduzione Questa guida illustra tutte le funzioni e le procedure da eseguire per gestire correttamente un ciclo di produzione
Capitolo 13: L offerta dell impresa e il surplus del produttore
 Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Capitolo 13: L offerta dell impresa e il surplus del produttore 13.1: Introduzione L analisi dei due capitoli precedenti ha fornito tutti i concetti necessari per affrontare l argomento di questo capitolo:
Un sistema così integrato, rende più semplice e preciso il trasferimento di dati dalla prima alla seconda fase del processo.
 CAD-CAM significa impiegare insieme sistemi di software per la progettazione assistita da computer e per la fabbricazione assistita da computer mediante macchinari a controllo numerico. Un sistema così
CAD-CAM significa impiegare insieme sistemi di software per la progettazione assistita da computer e per la fabbricazione assistita da computer mediante macchinari a controllo numerico. Un sistema così
Impianti per il trasferimento di energia
 Capitolo 2 Impianti per il trasferimento di energia 2.1 2.1 Introduzione In molte zone di un velivolo è necessario disporre di energia, in modo controllato; questo è necessario per molte attività, ad esempio
Capitolo 2 Impianti per il trasferimento di energia 2.1 2.1 Introduzione In molte zone di un velivolo è necessario disporre di energia, in modo controllato; questo è necessario per molte attività, ad esempio