Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
|
|
|
- Virginio Massa
- 7 anni fa
- Visualizzazioni
Transcript
1 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it
2 Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot introduzione alla meccanica dei robot definizione di spazio dei giunti e spazio cartesiano problemi di cinematica diretta ed inversa rappresentazione di Denavit-Hartenberg Riferimenti: Fu, Gonzalez, Lee, Robotica, McGraw-Hill: Cap 1-2, pp
3 Definizione di robot Dal vocabolario Webster: Dispositivo automatico che esegue funzioni normalmente svolte dagli esseri umani Dal Robot Institute of America: Manipolatore multifunzionale riprogrammabile progettato per spostare materiali, parti, utensili o altri dispositivi, per mezzo di movimenti variabili programmati per l esecuzione di un dato numero di compiti Definizione tradizionale: robot come manipolatore o braccio robotico
4 Manipolatore industriale Definizione: sequenza di segmenti rigidi, o link, connessi da giunti rotatori o di traslazione (catena cinematica) attuati da un motore Una estremità della serie è connessa ad una base di appoggio, l altra parte è libera e dotata di un utensile detto effettore finale (end effector)
5 Manipolatore industriale Giunto = insieme di due superfici che slittano l una sull altra rimanendo a contatto Coppia giunto-link = grado di libertà del robot (d.o.f. - degree of freedom) Link 0 = base di appoggio del robot e origine del sistema di coordinate di riferimento per il moto
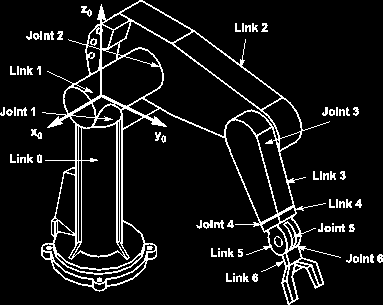
6 Manipolatore industriale
7 Tipi di giunti
8 Manipolatore industriale Categorie fondamentali: Cartesiano (tre giunti prismatici) Cilindrico (due giunti prismatici e uno rotoidale) Sferico (un giunto prismatico e due rotoidali) Rotazionale (tre o più giunti rotoidali)
9 Cartesiano (tre giunti prismatici) Cilindrico (due giunti prismatici e uno rotoidale) Sferico (un giunto prismatico e due rotoidali) Rotazionale (tre o più giunti rotoidali)
10 Manipolatore industriale Posizione del braccio: posizione dell utensile nello spazio di lavoro rispetto ad un sistema di coordinate cartesiane fissate sulla base del braccio (x,y,z) Orientamento del braccio: orientamento dell utensile nello spazio di lavoro definito dagli angoli di roll, pitch, yaw e (rollio, beccheggio, imbardata) Numero di gradi di libertà (N) > 6 = robot ridondante
11 x = (p, ) = (x,y,z,roll,pitch,yaw) Es. (0.7m,0.1m,0.5m,10,-45,5 ) Manipolatore industriale O P
12 Spazio di lavoro Spazio di lavoro del robot = regione descritta dall origine della terna utensile quando ai giunti del manipolatore si fanno eseguire tutti i movimenti possibili
13 Spazio di lavoro Spazio di lavoro raggiungibile = regione dello spazio che l origine della terna utensile può raggiungere con almeno un orientamento. Spazio di lavoro destro (o spazio di destrezza) = regione dello spazio che l origine della terna utensile può raggiungere con più di un orientamento.
14 Spazio di lavoro Dipende dalla lunghezza di ciascun link dal range di variazione di ciascun giunto

15 Manipolatore industriale Sottogruppi principali = struttura portante + polso Tipicamente: La struttura portante regola la posizione dell organo terminale al livello del pezzo da lavorare; Il polso regola l orientamento dell utensile per consentire la presa del pezzo.
16 Manipolatore industriale: problemi cinematici Calcolo della posizione dell utensile nello spazio di lavoro: cinematica diretta Calcolo della posizione dei giunti per ottenere una data posizione dell utensile nello spazio di lavoro: cinematica inversa Formulazione delle equazioni di moto del braccio (dinamica del manipolatore) Pianificazione delle traiettoria del manipolatore e controllo del moto
17 Cinematica del braccio robotico Studio analitico della geometria del moto del braccio rispetto ad un sistema di riferimento cartesiano fisso senza considerare le forze e i momenti che ne generano il moto (attuazione, inerzia, attrito, gravità, ecc). Descrizione analitica delle relazioni tra le posizioni dei giunti e la posizione e l orientamento dell effettore del braccio del robot.
18 Spazio dei giunti e spazio operativo Lo spazio dei giunti (o spazio delle configurazioni) è lo spazio in cui è definito il vettore q delle variabili di giunto. La sua dimensione è indicata con N. Lo spazio operativo (o spazio Cartesiano) è lo spazio in cui è definito il vettore x = (p, ) T. La sua dimensione è indicata con M. q è il vettore delle variabili di giunto, ha dimensione N x 1 ed è espresso in gradi p è il vettore delle coordinate cartesiane della posizione dell organo terminale. Ha dimensione 3x1 (coordinate x,y,z). è il vettore rappresentante l orientamento dell organo terminale. Ha dimensione 3x1.
19 Ridondanza cinematica Numero di gradi di libertà maggiore del numero di variabili necessarie alla caratterizzazione di un determinato compito la dimensione dello spazio operativo è minore della dimensione dello spazio dei giunti Il numero di gradi di ridondanza è pari a R=N-M Vantaggi: soluzioni multiple ottimizzabili Svantaggi: complessità di calcolo e controllo
20 Cinematica diretta e inversa Angoli dei giunti (q 1, q n ) Angoli dei giunti (q 1, q n ) Parametri geometrici noti Cinematica diretta Parametri geometrici noti Cinematica inversa Posizione ed orientamento dell end-effector x = (p, ) T
21 Problema della Cinematica diretta Per un determinato manipolatore, dato il vettore degli angoli dei giunti q e i parametri geometrici dei link, determinare la posizione e l orientamento dell end effector rispetto ad un sistema di coordinate di riferimento fissato Determinare la funzione vettoriale non lineare x = K(q) x incognita, q noto Es. PUMA (x,y,z, roll,pitch,yaw) = K(q 1,.,q 6 )
22 Problema della Cinematica inversa Il problema cinematico inverso riguarda la determinazione delle variabili di giunto una volta assegnati posizione e orientamento dell end effector. q = K -1 (x) q incognita, x noto Es. PUMA (q 1,.,q 6 )= K -1 (x,y,z,roll,pitch,yaw)
23 Richiami di algebra lineare Matrici per effettuare traslazioni e rotazioni tra sistemi di riferimento
24 Matrici di rotazione e descrizione dell orientamento Matrice di rotazione: matrice di trasformazione operante su un vettore posizione in uno spazio tridimensionale euclideo. La matrice di rotazione trasforma le coordinate del vettore espresse in un sistema di riferimento rotazionale OUVW nelle coordinate espresse in un sistema di riferimento OXYZ. OXYZ è il sistema di riferimento fisso nello spazio tridimensionale. OUVW è il sistema di coordinate solidale con il corpo rigido e si muove con esso.

25 Matrici di rotazione p Rp xyz uvw è la relazione che converte le coordinate del vettore p uvw espresse nel sistema OUVW nelle coordinate del vettore p xyz espresse nel sistema di riferimento OXYZ. R è la matrice di rotazione 3x3 tra le due terne OUVW e OXYZ
26 Matrici di rotazione fondamentali Rotazione intorno all asse X Rotazione intorno all asse Y R x, = cos -sin R y, = cos 0 sin sin cos -sin 0 cos Rotazione intorno all asse Z R z, = cos -sin 0 sin cos

27 Matrici di rotazione composte Le matrici di rotazione fondamentali possono essere moltiplicate tra loro per rappresentare una sequenza di rotazioni finite intorno agli assi principali del sistema di riferimento: R = R x, R y, R z, p Rp xyz uvw NB: la moltiplicazione tra matrici non è commutativa
28 Coordinate omogenee Rappresentazione di un vettore posizione di N componenti con un vettore di (N+1) componenti P = (p x, p y, p z ) T P^ = (wp x, wp y, wp z, w) T w = fattore di scala In robotica w = 1. Rappresentazione unica delle componenti di traslazione, rotazione, prospettiche e di scala.
29 Matrici di rotazione omogenee R x, = R z, = Rotazione intorno all asse X cos -sin 0 0 sin cos Rotazione intorno all asse Z cos -sin 0 0 sin cos R y, = Rotazione intorno all asse Y cos 0 sin sin 0 cos
30 Matrice di traslazione omogenea fondamentale T tran = dx dy dz w P P xyz = T tran P vuw z v u y x
31 Matrice di trasformazione omogenea: rotazione e traslazione nx sx ax dx T= R 3x3 f 1x3 p 3x1 1 1x1 = ny sy ay dy nz sz az dz w P u p xyz = T p vuw z v y x
32 Interpretazione geometrica delle matrici di trasformazione T= nx sx ax dx ny sy ay dy nz sz az dz = n s a p w u p = Origine di OUVW rispetto a OXYZ z P v n,s,a rappresentano l orientamento della terna OUVW rispetto a OXYZ x y
33 Matrici di trasformazione omogenee composte Le matrici omogenee di rotazione e traslazione possono essere moltiplicate tra loro per ottenere una matrice composta (T) T = T 0 1T 1 2 T n-1 n p 0 = T 0 1T 1 2 T n-1 n p n = T p n
34 Cinematica Diretta: Rappresentazione di Denavit-Hartenberg Metodo matriciale per descrivere le relazioni di traslazione e rotazione tra link adiacenti La rappresentazione di D-H consiste in una matrice di trasformazione omogenea 4x4 che rappresenta ogni sistema di coordinate dei link rispetto ai giunti con riferimento al link precedente Attraverso trasformazioni sequenziali, la posizione dell effettore finale può essere espressa nelle coordinate della base P
35 Sistemi di coordinate dei link e loro parametri A ciascun link di un manipolatore sono associati quattro parametri: due determinano la posizione relativa dei link adiacenti (parametri di giunto) due determinano la struttura del link Le matrici di trasformazione omogenea dipendono da questi parametri, di cui solo uno è una incognita
36 Sistemi di coordinate dei link e loro parametri
37 Sistemi di coordinate dei link e loro parametri L asse di rotazione del giunto è definito alla connessione dei due link che esso unisce. Per ogni asse sono definite due rette normali, una per ogni link. A ciascun link di un manipolatore sono associati quattro parametri: due determinano la posizione relativa dei link adiacenti (parametri di giunto) e due la struttura del link.
38 Sistemi di coordinate dei link e loro parametri La posizione relativa del link i-esimo rispetto al link (i-1)-esimo può essere definita misurando la distanza e l angolo tra i due link adiacenti d i = distanza fra le rette normali misurata lungo l asse del giunto i-esimo i = angolo compreso tra le due normali misurato su un piano normale all asse stesso.

39 Sistemi di coordinate dei link e loro parametri Dal punto di vista cinematico, un link mantiene una configurazione fissa tra due giunti (struttura del link). La struttura del link i può essere caratterizzata mediante la lunghezza e l angolo di rotazione del link i. a i = distanza minima misurata lungo la normale comune tra gli assi dei giunti i = angolo compreso tra gli assi dei giunti su un piano normale ad a i
40 Sistemi di coordinate dei link e loro parametri Riassumendo, i parametri a i, i, d i e i costituiscono un insieme sufficiente a determinare completamente la configurazione cinematica di ciascun anello della catena cinematica articolata del braccio. Denavit e Hartenberg hanno proposto un metodo matriciale per stabilire sistematicamente un sistema di coordinate per ogni link della catena articolata.
41 Le relazioni tra link adiacenti sono espresse mediante matrici di trasformazione omogenee 4x4. Rappresentazione di Denavit-Hartenberg Algoritmo di rappresentazione dei sistemi di coordinate ortonormali coerenti per un robot, che facilita lo sviluppo del procedimento logico per la soluzione dei giunti (matrice del braccio). Dato un robot ad N gradi di libertà si assegna un sistema di coordinate ortonormali a ogni link. L assegnamento inizia dalla base del supporto e procede fino all effettore per un totale di N+1 sistemi di riferimento
42 Rappresentazione di Denavit-Hartenberg Matrice di trasformazione omogenea 4X4 che rappresenta ogni sistema di coordinate dei link rispetto ai giunti con riferimento al link precedente. Per un braccio a 6 gradi di libertà = 7 sistemi di coordinate asse z i-1 = asse di movimento del giunto i asse z i = asse di movimento del giunto i+1 asse x i = normale all asse z i-1 e all asse z i asse y i = completa la regola della mano destra Attraverso trasformazioni sequenziali l estremità dell effettore espressa nelle coordinate del sistema solidale alla mano può essere trasformata ed espressa nel sistema delle coordinate di base (sistema inerziale di riferimento).
43 Rappresentazione di Denavit-Hartenberg Passi fondamentali dell algoritmo: 1. Determinare il sistema di coordinate fondamentale 2. Per ogni giunto da 1 a 5, stabilire l asse del giunto, l origine del sistema di coordinate, l asse x e l asse y. 3. Stabilire il sistema di coordinate della mano, uscente dal robot. 4. Per ogni giunto e per ogni link, determinare quindi i parametri dei giunti e dei link.
44 Rappresentazione di Denavit- Hartenberg per il PUMA 560
45 Rappresentazione di Denavit-Hartenberg Stabilito il sistema di coordinate di D-H per ogni link, si può definire una matrice di trasformazione omogenea che mette in relazione i sistemi di coordinate adiacenti. Un punto r i espresso nel sistema di coordinate i-esimo, può essere espresso nel sistema di co-ordinate (i-1)-esimo come r i-1 effettuando trasformazioni di rotazione e traslazione: Ruotare intorno a z i-1 di un angolo i per allineare x i con x i-1 Traslare di una quantità d i lungo z i-1 per far coincidere x i e x i-1 Traslare di a i lungo x i per portare le due origini a coincidere Ruotare di i per far coincidere i due sistemi di riferimento
46 Rappresentazione di Denavit-Hartenberg Queste trasformazione può essere espressa con una matrice di trasformazione omogenea: i-1 A i =T z,d T z, T x,a T x, cos i - cos i sin i sin i sin i a i cos i r i-1 = i-1 A i p i = sin i cos i cos i -sin i cos i - a i sin i 0 sin i cos i - d i
47 Rappresentazione di Denavit-Hartenberg La rappresentazione D-H dipende dai quattro parametri geometrici associati a ogni link, che descrivono completamente tutti i giunti rotazionali o prismatici. Per un giunto rotazionale d i, a i, i sono i parametri del giunto e restano costanti per un dato robot, varia solo i Per un giunto prismatico i, a i, i sono i parametri del giunto e restano costanti per un dato robot, varia solo d i
48 Rappresentazione di Denavit-Hartenberg La matrice omogenea T che specifica il sistema di coordinate n-esimo rispetto al sistema di coordinate fondamentale è il prodotto a catena delle successive matrici di trasformazione delle coordinate di i-1 A i, ed è espressa come: 0 T n = 0 A 1 1 A 2... n-1 A n 0 T n = X i Y i Z i p i T n = 0 R n 0 p n 0 1 Dove [ X i Y i Z i ] è la matrice di orientamento del sistema di coordinate n-esimo sul link n rispetto al sistema di coordinate fondamentale P i è il vettore posizione che punta dall origine del sistema di coordinate fondamentale all origine del sistema di coordinate n-esimo R è la matrice che definisce gli angoli di roll, pitch e yaw
49 Rappresentazione di Denavit-Hartenberg 0 T n = 0 R n 0 p n 0 1 = n s a p
50 Manipolatore planare a 3 link
51 Manipolatore sferico
52 Manipolatore antropomorfo
53 Polso sferico
54 Manipolatore di Stanford
55 Manipolatore antropomorfo con polso sferico
56 Rappresentazione di Denavit-Hartenberg La cinematica diretta di un manipolatore a 6 link è riducibile semplicemente al calcolo di T = 0 A 6 moltiplicando a catena le 6 matrici Per manipolatori a giunti rotazionali, i parametri da definire per stabilire la posizione dell effettore finale nello spazio operativo sono gli angoli dei giunti i = q i Per un dato q = (q 0, q 1, q 2, q 3, q 4, q 5 ) è possibile determinare (x,y,z,roll,pitch,yaw) x = K(q) = T( )
57 Problema della cinematica inversa Il problema cinematico inverso riguarda la determinazione delle variabili di giunto una volta assegnati posizione e orientamento dell organo terminale. q = K -1 (x) q incognita, x noto Es. PUMA (q 1,.,q 6 )= K -1 (x,y,z,roll,pitch,yaw)
58 Il problema cinematico inverso Le equazioni da risolvere sono in generale non lineari Non è sempre possibile trovare una soluzione analitica Si possono avere soluzioni multiple Si possono avere infinite soluzioni (manipolatori ridondanti) In funzione della struttura cinematica del braccio, possono non esistere soluzioni ammissibili L esistenza di una soluzione è sempre garantita se la posizione e l orientamento desiderati appartengono allo spazio di lavoro destro del manipolatore
59 Il problema cinematico inverso Generalmente si scinde il problema in due sottoproblemi disaccoppiando la soluzione per la posizione da quella per l orientamento Dati noti = posizione p ed orientamento R della pinza Calcolare la posizione del polso in funzione delle prime tre variabili di giunto q 1, q 2, q 3 Risolvere la cinematica inversa per le prime tre variabili di giunto q 1, q 2, q 3 Calcolare l orientamento del polso in funzione di (q 1, q 2, q 3 ) Risolvere la cinematica inversa per l orientamento ( 4, 5, 6 )
60 Modello Cinematico del braccio umano
61 Modello Cinematico della mano
62 Modello Cinematico del pollice

63 Modello Cinematico del corpo umano
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
4 Cinematica diretta dei robot
 4 Cinematica diretta dei robot In questa sezione verrà fornito un metodo costruttivo per caratterizzare la posizione del punto terminale di un manipolatore (detto anche effettore) in base alla posizione
4 Cinematica diretta dei robot In questa sezione verrà fornito un metodo costruttivo per caratterizzare la posizione del punto terminale di un manipolatore (detto anche effettore) in base alla posizione
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
di manipolatori seriali
 Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Spazio dei giunti e spazio operativo
 CINEMATICA relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale Matrice di rotazione Rappresentazioni dell orientamento Trasformazioni omogenee Cinematica diretta Spazio
CINEMATICA relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale Matrice di rotazione Rappresentazioni dell orientamento Trasformazioni omogenee Cinematica diretta Spazio
Cinematica. La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane
 Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Rappresentazioni in 3D. Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati
 Rappresentazioni in 3D Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto scalare, prodotto
Rappresentazioni in 3D Fare riferimento al cap. 2 del libro di testo Sistemi di riferimento Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto scalare, prodotto
Robotica I. Test 11 Novembre 2009
 Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
SPAZIO DI LAVORO. Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona
 SPAZIO DI LAVORO Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona 1 11 Introduzione Equazione Cinematica Diretta Esprime la posizione della terna utensile rispetto alla terna
SPAZIO DI LAVORO Paolo Fiorini Dipartimento di Informatica Università degli Studi di Verona 1 11 Introduzione Equazione Cinematica Diretta Esprime la posizione della terna utensile rispetto alla terna
Rappresentazioni in 3D. Vettori: rappresentano punti e/o segmenti orientati
 Rappresentazioni in 3D Leggere Cap. 2 del libro di testo Sistemi di riferimento Caratterizzano i corpi rigidi Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto
Rappresentazioni in 3D Leggere Cap. 2 del libro di testo Sistemi di riferimento Caratterizzano i corpi rigidi Vettori: rappresentano punti e/o segmenti orientati Operazioni vettoriali: somma, prodotto
Tipi di polso robotico 2 gdl
 Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
Compito d esame 14/11/2005
 COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
Cinematica. La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane
 Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
università DEGLI STUDI DI NAPOLI FEDERICO II
 università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
Lezione 2: I problemi fondamentali. Per capire meglio i problemi
 Robotica Industriale Lezione 2: I problemi fondamentali Per capire meglio i problemi Diamo un occhiata a cosa si fa con i robot industriali Cerchiamo di capire quali siano le esigenze del lavoro che devono
Robotica Industriale Lezione 2: I problemi fondamentali Per capire meglio i problemi Diamo un occhiata a cosa si fa con i robot industriali Cerchiamo di capire quali siano le esigenze del lavoro che devono
Prova Scritta di Robotica I
 Esercizio 1 Prova Scritta di Robotica I 8 Gennaio 4 Il robot planare in figura è costituito da due giunti rotatori ed uno prismatico. L P Assegnare le terne di riferimento secondo la convenzione di Denavit-Hartenberg,
Esercizio 1 Prova Scritta di Robotica I 8 Gennaio 4 Il robot planare in figura è costituito da due giunti rotatori ed uno prismatico. L P Assegnare le terne di riferimento secondo la convenzione di Denavit-Hartenberg,
SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT
 SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Spazio dei giunti e spazio operativo
 CINEMATICA relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale Matrice di rotazione Rappresentazioni dell orientamento Trasformazioni omogenee Cinematica diretta Spazio
CINEMATICA relazioni tra posizioni dei giunti e posizione e orientamento dell organo terminale Matrice di rotazione Rappresentazioni dell orientamento Trasformazioni omogenee Cinematica diretta Spazio
I PARTE Domande a risposta multipla
 10/02/2012 MATRICOLA I PARTE Domande a risposta multipla La valutazione di ogni domanda sarà fatta assegnando alle risposte esatte i punteggi indicati. La valutazione finale sarà in trentesimi è farà media
10/02/2012 MATRICOLA I PARTE Domande a risposta multipla La valutazione di ogni domanda sarà fatta assegnando alle risposte esatte i punteggi indicati. La valutazione finale sarà in trentesimi è farà media
trasformazioni omogenee
 Moti rigidi idi generali e trasformazioni omogenee Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Trasformazioni rigide generali Rotazione fra due sistemi di riferimento
Moti rigidi idi generali e trasformazioni omogenee Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Trasformazioni rigide generali Rotazione fra due sistemi di riferimento
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 5 Marzo 004 Esercizio 1 Si consideri un robot mobile a due ruote ad orientamento fisso (ed una passiva riorientabile e non centrata di appoggio) comandate indipendentemente
Prova Scritta di Robotica I 5 Marzo 004 Esercizio 1 Si consideri un robot mobile a due ruote ad orientamento fisso (ed una passiva riorientabile e non centrata di appoggio) comandate indipendentemente
CENTRO DI MASSA. il punto geometrico le cui coordinate, in un dato sistema di riferimento, sono date da:
 CENTRO DI MASSA il punto geometrico le cui coordinate, in un dato sistema di riferimento, sono date da: dove M = m 1 + m 2 +... + m N è la massa totale del sistema e le quantità r i sono i raggi vettori
CENTRO DI MASSA il punto geometrico le cui coordinate, in un dato sistema di riferimento, sono date da: dove M = m 1 + m 2 +... + m N è la massa totale del sistema e le quantità r i sono i raggi vettori
5a.Rotazione di un corpo rigido attorno ad un asse fisso
 5a.Rotazione di un corpo rigido attorno ad un asse fisso Un corpo rigido è un corpo indeformabile: le distanze relative tra i punti materiali che lo costituiscono rimangono costanti. Il modello corpo rigido
5a.Rotazione di un corpo rigido attorno ad un asse fisso Un corpo rigido è un corpo indeformabile: le distanze relative tra i punti materiali che lo costituiscono rimangono costanti. Il modello corpo rigido
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
Meccanica dei Manipolatori. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 7 Gennaio 8 Esercizio Si consideri il robot planare a tre giunti rotatori nella configurazione mostrata in figura Le lunghezze dei bracci sono l 5, l, l 3 5 [m] Si determini
Prova Scritta di Robotica I 7 Gennaio 8 Esercizio Si consideri il robot planare a tre giunti rotatori nella configurazione mostrata in figura Le lunghezze dei bracci sono l 5, l, l 3 5 [m] Si determini
Cinematica diretta e inversa di un manipolatore
 Cinematica diretta e inversa di un manipolatore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica diretta e inversa di un manipolatore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot. Introduzione al corso. Prof. Paolo Rocco
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 0 Luglio 2009 Esercizio Si consideri il robot planare RP in figura, dove l è la lunghezza del primo braccio e sono indicate le coordinate generalizzate da utilizzare. Sia p
Prova Scritta di Robotica I 0 Luglio 2009 Esercizio Si consideri il robot planare RP in figura, dove l è la lunghezza del primo braccio e sono indicate le coordinate generalizzate da utilizzare. Sia p
Corso di Robotica 1 Cinematica inversa
 Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Prova Scritta di Robotica I 9 Febbraio 2009
 Esercizio Prova Scritta di Robotica I 9 Febbraio 9 Si consideri l estensione al secondo ordine in accelerazione dello schema di controllo cinematico di traiettoria cartesiana. A tale scopo, si assuma che
Esercizio Prova Scritta di Robotica I 9 Febbraio 9 Si consideri l estensione al secondo ordine in accelerazione dello schema di controllo cinematico di traiettoria cartesiana. A tale scopo, si assuma che
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico (ing. M. Troncossi)
") MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
Dinamica del Manipolatore (seconda parte)
") Dinamica del Manipolatore (seconda parte) Ph.D Ing. Michele Folgheraiter Corso di ROBOTICA2 Prof.ssa Giuseppina Gini Anno. Acc. 2006/2007 Equilibrio Statico Manipolatore Il manipolatore può essere rappresentato
Dinamica del Manipolatore (seconda parte) Ph.D Ing. Michele Folgheraiter Corso di ROBOTICA2 Prof.ssa Giuseppina Gini Anno. Acc. 2006/2007 Equilibrio Statico Manipolatore Il manipolatore può essere rappresentato
Dispense del corso di Robotica con Laboratorio
 Dispense del corso di Robotica con Laboratorio Docente: Luca Zaccarian December 17, 2002 Contents 1 Nozioni preliminari 2 1.1 Operazioni sui vettori............................... 2 1.2 Basi e coordinate.................................
Dispense del corso di Robotica con Laboratorio Docente: Luca Zaccarian December 17, 2002 Contents 1 Nozioni preliminari 2 1.1 Operazioni sui vettori............................... 2 1.2 Basi e coordinate.................................
Esercitazione di Analisi Matematica II
 Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
Cinematica differenziale
 Corso di Robotica 1 Cinematica differenziale Prof Alessandro De Luca Robotica 1 1 Cinematica differenziale studio dei legami tra moto (velocità) nello spazio dei giunti e moto (velocità lineare e angolare)
Corso di Robotica 1 Cinematica differenziale Prof Alessandro De Luca Robotica 1 1 Cinematica differenziale studio dei legami tra moto (velocità) nello spazio dei giunti e moto (velocità lineare e angolare)
La matematica del CAD. Vettori e Matrici
 La matematica del CAD Vettori e Matrici IUAV Disegno Digitale Camillo Trevisan I programmi CAD riducono tutti i problemi geometrici in problemi analitici: la proiezione di un punto su un piano viene, ad
La matematica del CAD Vettori e Matrici IUAV Disegno Digitale Camillo Trevisan I programmi CAD riducono tutti i problemi geometrici in problemi analitici: la proiezione di un punto su un piano viene, ad
Robotica I. M. Gabiccini
 Descrizione i dei moti rigidi idi Robotica I M. Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Descrizione di moti rigidi Consideriamo uno spazio a 3 dimensioni Euclideo, cioè lo spazio delle
Descrizione i dei moti rigidi idi Robotica I M. Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Descrizione di moti rigidi Consideriamo uno spazio a 3 dimensioni Euclideo, cioè lo spazio delle
Cinematica e Dinamica di un manipolatore Puma
 Cinematica e Dinamica di un manipolatore Puma Prof. Cesare Rossi Facoltá di Ingegneria, Corso di Laurea Magistrale in Ingegneria dell Automazione Universitá Federico II, Napoli 0 dicembre 011 Giovanni
Cinematica e Dinamica di un manipolatore Puma Prof. Cesare Rossi Facoltá di Ingegneria, Corso di Laurea Magistrale in Ingegneria dell Automazione Universitá Federico II, Napoli 0 dicembre 011 Giovanni
Robotica I. Test 2 18 Dicembre 2009
 Robotica I Test 8 Dicembre 9 Si consideri il robot con quattro giunti rotatori in Figura. Le terne di Denavit-Hartenberg sono già assegnate, con la terna posta all intersezione tra primo e secondo asse
Robotica I Test 8 Dicembre 9 Si consideri il robot con quattro giunti rotatori in Figura. Le terne di Denavit-Hartenberg sono già assegnate, con la terna posta all intersezione tra primo e secondo asse
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
La trasformazione di camera
 La trasformazione di camera 1 Introduzione Per rappresentare un oggetto tridimensionale nello spazio (scena) in un piano bidimensionale (spazio delle immagini, quale il monitor o un foglio) è necessario
La trasformazione di camera 1 Introduzione Per rappresentare un oggetto tridimensionale nello spazio (scena) in un piano bidimensionale (spazio delle immagini, quale il monitor o un foglio) è necessario
CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA b) Dal testo sappiamo già che si tratta di un isometria. Rappresentando i punti si vede che sia
 Dal testo sappiamo già che si tratta di un isometria. Rappresentando i punti si vede che sia") CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA FOGLIO DI ESERCIZI GEOMETRIA 008/09 Esercizio.. Dati i punti i O0, 0), A, ), B, ), determinare l isometria fx, y) = x, y ) tale che fo) = O, fa) = A, fb)
CORSO DI LAUREA IN INGEGNERIA EDILE/ARCHITETTURA FOGLIO DI ESERCIZI GEOMETRIA 008/09 Esercizio.. Dati i punti i O0, 0), A, ), B, ), determinare l isometria fx, y) = x, y ) tale che fo) = O, fa) = A, fb)
Prova Scritta di Robotica II. 25 Marzo 2004
 Prova Scritta di Robotica II 5 Marzo 004 Si consideri il robot planare RP in figura in moto in un piano verticale Siano: m 1 e m le masse dei due bracci; d 1 la distanza del baricentro del primo braccio
Prova Scritta di Robotica II 5 Marzo 004 Si consideri il robot planare RP in figura in moto in un piano verticale Siano: m 1 e m le masse dei due bracci; d 1 la distanza del baricentro del primo braccio
I.T.I.S «G. MARCONI» - PADOVA Via Manzoni, 80 Tel.: Fax
 I.T.I.S «G. MARCONI» - PADOVA Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277 marconi@provincia.padova.it www.itismarconipadova.it Settore tecnologico Indirizzo meccanica meccatronica ed energia
I.T.I.S «G. MARCONI» - PADOVA Via Manzoni, 80 Tel.: 049.80.40.211 Fax 049.80.40.277 marconi@provincia.padova.it www.itismarconipadova.it Settore tecnologico Indirizzo meccanica meccatronica ed energia
Esercizio 1: Data la composizione di rotazioni. Rot(i, 180)Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette:
Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette:") Esercizio 1: Data la composizione di rotazioni Rot(i, 180)Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette: 1 Rotazione di 180 intorno all asse x seguita da rotazione di 90 intorno all
Esercizio 1: Data la composizione di rotazioni Rot(i, 180)Rot(j, 45)Rot(k, 90) Indicare con una tutte le descrizioni corrette: 1 Rotazione di 180 intorno all asse x seguita da rotazione di 90 intorno all
Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: Cognome e nome: (dati nascosti per tutela privacy)
") Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000695216 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000695216 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Si occupa di dare un descrizione quantitativa degli aspetti geometrici e temporali del moto indipendentemente dalle cause che lo producono.
 CINEMATICA DEL PUNTO MATERIALE I Si occupa di dare un descrizione quantitativa degli aspetti geometrici e temporali del moto indipendentemente dalle cause che lo producono. Il moto di un punto risulta
CINEMATICA DEL PUNTO MATERIALE I Si occupa di dare un descrizione quantitativa degli aspetti geometrici e temporali del moto indipendentemente dalle cause che lo producono. Il moto di un punto risulta
Informatica Grafica. Un introduzione
 Informatica Grafica Un introduzione Rappresentare la Geometria Operabile da metodi di calcolo automatici Grafica Vettoriale Partiamo dalla rappresentazione di un punto... Spazi Vettoriale SPAZI VETTORIALI
Informatica Grafica Un introduzione Rappresentare la Geometria Operabile da metodi di calcolo automatici Grafica Vettoriale Partiamo dalla rappresentazione di un punto... Spazi Vettoriale SPAZI VETTORIALI
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE
 MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
Tesine da svolgere per la preparazione dell esame
 Corso di Laurea in Ingegneria dell Automazione Esame di Robotica Industriale A.A. 2007/2008 Tesine da svolgere per la preparazione dell esame Vengono di seguito presentati alcuni esercizi studiati per
Corso di Laurea in Ingegneria dell Automazione Esame di Robotica Industriale A.A. 2007/2008 Tesine da svolgere per la preparazione dell esame Vengono di seguito presentati alcuni esercizi studiati per
Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi
 PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi") Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi 1) Cinematica 1.1) Ripasso: Il moto rettilineo Generalità sul moto: definizione di sistema
Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi 1) Cinematica 1.1) Ripasso: Il moto rettilineo Generalità sul moto: definizione di sistema
Dispense del corso di Robotica con Laboratorio
 Dispense del corso di Robotica con Laboratorio Docente: Luca Zaccarian December 17, 2002 Contents 1 Nozioni preliminari 2 1.1 Operazioni sui vettori............................... 2 1.2 Basi e coordinate.................................
Dispense del corso di Robotica con Laboratorio Docente: Luca Zaccarian December 17, 2002 Contents 1 Nozioni preliminari 2 1.1 Operazioni sui vettori............................... 2 1.2 Basi e coordinate.................................
Lezione 4: Il movimento
 Robotica Robot Industriali e di Servizio Lezione 4: Il movimento Riassunto delle puntate precedenti: Posa di un corpo nello spazio è 6 coordinate 6 coordinate è 6 G.D.L. opportuni e ben disposti Ad ogni
Robotica Robot Industriali e di Servizio Lezione 4: Il movimento Riassunto delle puntate precedenti: Posa di un corpo nello spazio è 6 coordinate 6 coordinate è 6 G.D.L. opportuni e ben disposti Ad ogni
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione sicura tra umani
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione sicura tra umani
Lezione 3: Le strutture cinematiche
 Robotica Robot Industriali e di Servizio Lezione 3: Le strutture cinematiche Il primo problema: la posizione di un oggetto Quasi tutte le applicazioni (industriali) che abbiamo visto implicavano la soluzione
Robotica Robot Industriali e di Servizio Lezione 3: Le strutture cinematiche Il primo problema: la posizione di un oggetto Quasi tutte le applicazioni (industriali) che abbiamo visto implicavano la soluzione
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018.
 Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018 Prova teorica - A Nome... N. Matricola... Ancona, 10 febbraio 2018 1. Un asta AB di lunghezza
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018 Prova teorica - A Nome... N. Matricola... Ancona, 10 febbraio 2018 1. Un asta AB di lunghezza
Dinamica Rotazionale
 Dinamica Rotazionale Richiamo: cinematica rotazionale, velocità e accelerazione angolare Energia cinetica rotazionale: momento d inerzia Equazione del moto rotatorio: momento delle forze Leggi di conservazione
Dinamica Rotazionale Richiamo: cinematica rotazionale, velocità e accelerazione angolare Energia cinetica rotazionale: momento d inerzia Equazione del moto rotatorio: momento delle forze Leggi di conservazione
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
generazione degli ingressi di riferimento per il sistema di controllo del moto
 PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
PIANIFICAZIONE DI TRAIETTORIE generazione degli ingressi di riferimento per il sistema di controllo del moto Percorso e traiettoria Traiettorie nello spazio dei giunti Traiettorie nello spazio operativo
Modello dinamico dei robot: approccio di Newton-Eulero
 Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Corso di Robotica 2 Modello dinamico dei robot: approccio di Newton-Eulero Prof. Alessandro De Luca A. De Luca Approcci alla modellistica dinamica (reprise) approccio energetico (eq. di Eulero-Lagrange)
Modello dinamico dei robot: approccio Lagrangiano
 Corso di Robotica 2 Modello dinamico dei robot: approccio Lagrangiano Prof. Alessandro De Luca A. De Luca Modello dinamico esprime il legame tra forze generalizzate ut) agenti sul robot movimento del robot
Corso di Robotica 2 Modello dinamico dei robot: approccio Lagrangiano Prof. Alessandro De Luca A. De Luca Modello dinamico esprime il legame tra forze generalizzate ut) agenti sul robot movimento del robot
INTRODUZIONE ALLA FISICA PROF. FRANCESCO DE PALMA
 INTRODUZIONE ALLA FISICA PROF. FRANCESCO DE PALMA Sommario GRANDEZZE FISICHE... 3 UNITÀ DI MISURA... 3 PREFISSI... 5 ANALISI DIMENSIONALE... 5 CONVERSIONI DI UNITÀ... 6 SISTEMI DI COORDINATE... 7 I VETTORI...
INTRODUZIONE ALLA FISICA PROF. FRANCESCO DE PALMA Sommario GRANDEZZE FISICHE... 3 UNITÀ DI MISURA... 3 PREFISSI... 5 ANALISI DIMENSIONALE... 5 CONVERSIONI DI UNITÀ... 6 SISTEMI DI COORDINATE... 7 I VETTORI...
Esercizi sulle affinità - aprile 2009
 Esercizi sulle affinità - aprile 009 Ingegneria meccanica 008/009 Esercizio Sono assegnate nel piano le sei rette r : =, s : =, t : =, r : =, s : =, t : = determinare l affinità che trasforma ordinatamente
Esercizi sulle affinità - aprile 009 Ingegneria meccanica 008/009 Esercizio Sono assegnate nel piano le sei rette r : =, s : =, t : =, r : =, s : =, t : = determinare l affinità che trasforma ordinatamente
Geometria analitica: rette e piani
 Geometria analitica: rette e piani parametriche Allineamento nel piano nello spazio Angoli tra rette e distanza 2 2006 Politecnico di Torino 1 Esempio 2 Sia A = (1, 2). Per l interpretazione geometrica
Geometria analitica: rette e piani parametriche Allineamento nel piano nello spazio Angoli tra rette e distanza 2 2006 Politecnico di Torino 1 Esempio 2 Sia A = (1, 2). Per l interpretazione geometrica
Anno Accademico 2015/2016
 Mod. 136/1 ALMA MATER STUDIORUM UNIVERSITÀ DI BOLOGNA Anno Accademico 2015/2016 Scuola di Scienze Corsi di Laurea o di Diploma Triennale in Matematica (nuovo ordinamento) Insegnamento Geometria I Docente
Mod. 136/1 ALMA MATER STUDIORUM UNIVERSITÀ DI BOLOGNA Anno Accademico 2015/2016 Scuola di Scienze Corsi di Laurea o di Diploma Triennale in Matematica (nuovo ordinamento) Insegnamento Geometria I Docente
4. Sottospazi vettoriali Piani e rette in E 3 O
 Indice Prefazione i Capitolo 0. Preliminari 1 1. Insiemistica e logica 1 1.1. Insiemi 1 1.2. Insiemi numerici 2 1.3. Logica matematica elementare 5 1.4. Ancora sugli insiemi 7 1.5. Funzioni 10 1.6. Composizione
Indice Prefazione i Capitolo 0. Preliminari 1 1. Insiemistica e logica 1 1.1. Insiemi 1 1.2. Insiemi numerici 2 1.3. Logica matematica elementare 5 1.4. Ancora sugli insiemi 7 1.5. Funzioni 10 1.6. Composizione
Una approssimazione allo spazio della fisica classica. Spazi affini euclidei.
 Una approssimazione allo spazio della fisica classica. Spazi affini euclidei. Federico Lastaria. Analisi e Geometria 1. Una introduzione allo spazio della fisica classica. 1/20 Lo spazio E 3 (il piano
Una approssimazione allo spazio della fisica classica. Spazi affini euclidei. Federico Lastaria. Analisi e Geometria 1. Una introduzione allo spazio della fisica classica. 1/20 Lo spazio E 3 (il piano
Trasformazioni geometriche nel piano
 Trasformazioni geometriche nel piano Le trasformazioni geometriche In generale una trasformazione geometrica è una corrispondenza biunivoca del piano in sé, ossia associa ad un punto del piano uno ed un
Trasformazioni geometriche nel piano Le trasformazioni geometriche In generale una trasformazione geometrica è una corrispondenza biunivoca del piano in sé, ossia associa ad un punto del piano uno ed un
; r 0 2 m = l 2 (s 2 θ + c 2 θ) = l 2
 = l 2") 1 Calcolo del momento d inerzia Esercizio I.1 Pendolo semplice Si faccia riferimento alla Figura 1, dove è rappresentato un pendolo semplice; si utilizzeranno diversi sistemi di riferimento: il primo,
1 Calcolo del momento d inerzia Esercizio I.1 Pendolo semplice Si faccia riferimento alla Figura 1, dove è rappresentato un pendolo semplice; si utilizzeranno diversi sistemi di riferimento: il primo,
Modellistica dei Manipolatori Industriali 01BTT Esame del 23/11/2001 Soluzione
 Modellistica dei Manipolatori Industriali 1BTT Esame del 23/11/21 Soluzione 1 Sistemi di riferimento e cinematica di posizione In Figura 1 il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali 1BTT Esame del 23/11/21 Soluzione 1 Sistemi di riferimento e cinematica di posizione In Figura 1 il manipolatore è stato ridisegnato per mettere in evidenza variabili
DIPARTIMENTO DI INGEGNERIA Anno Accademico 2017/18 Registro lezioni del docente DE FALCO DOMENICO
 Attività didattica DIPARTIMENTO DI INGEGNERIA Anno Accademico 2017/18 Registro lezioni del docente DE FALCO DOMENICO MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di svolgimento: Secondo Semestre
Attività didattica DIPARTIMENTO DI INGEGNERIA Anno Accademico 2017/18 Registro lezioni del docente DE FALCO DOMENICO MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di svolgimento: Secondo Semestre
ALGEBRA VETTORIALE Corso di Fisica per la Facoltà di Farmacia, Università Gabriele D Annunzio, Chieti-Pescara, Cosimo Del Gratta 2008
 LGER VETTORILE DEFINIZIONE DI VETTORE (1) Sia E lo spazio tridimensionale della geometria euclidea. Consideriamo due punti e appartenenti a E Si chiama segmento orientato, e si indica con (,) il segmento
LGER VETTORILE DEFINIZIONE DI VETTORE (1) Sia E lo spazio tridimensionale della geometria euclidea. Consideriamo due punti e appartenenti a E Si chiama segmento orientato, e si indica con (,) il segmento
Prova Scritta di Robotica II
 Esercizio 1 Prova Scritta di Robotica II 10 Luglio 2009 Il modello dinamico di un generico robot planare 2R è della forma con B(q) = B(q) q + c(q, q) + g(q) = τ, ( ) ( b11 (q 2 ) b 12 (q 2 ) c1 (q, c(q,
Esercizio 1 Prova Scritta di Robotica II 10 Luglio 2009 Il modello dinamico di un generico robot planare 2R è della forma con B(q) = B(q) q + c(q, q) + g(q) = τ, ( ) ( b11 (q 2 ) b 12 (q 2 ) c1 (q, c(q,
2 Sistemi lineari. Metodo di riduzione a scala.
 Sistemi lineari. Metodo di riduzione a scala. Esercizio.1 Utilizzando il metodo di eliminazione di Gauss, risolvere i seguenti sistemi lineari: 1. 3. x 1 x + 3x 3 = 1 x 1 x x 3 = x 1 + x + 3x 3 = 5 x 1
Sistemi lineari. Metodo di riduzione a scala. Esercizio.1 Utilizzando il metodo di eliminazione di Gauss, risolvere i seguenti sistemi lineari: 1. 3. x 1 x + 3x 3 = 1 x 1 x x 3 = x 1 + x + 3x 3 = 5 x 1
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile
 Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2013-2014 A. Ponno (aggiornato al 30 dicembre 2013) 2 Ottobre 2013 1/10/13 Benvenuto, presentazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2013-2014 A. Ponno (aggiornato al 30 dicembre 2013) 2 Ottobre 2013 1/10/13 Benvenuto, presentazione
I.I.S.S. G. Marconi Bari. Istituto Tecnico settore Tecnologico :: Liceo Scientifico opzione Scienze applicate. Il Robot a scuola
 Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2017/2018 Prof.ssa Paola Giacconi
 PROGRAMMA di FISICA a.s. 2017/2018 Prof.ssa Paola Giacconi") Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2017/2018 Prof.ssa Paola Giacconi 1) Cinematica 1.1) Ripasso: Il moto rettilineo Generalità sul moto: definizione di sistema
Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2017/2018 Prof.ssa Paola Giacconi 1) Cinematica 1.1) Ripasso: Il moto rettilineo Generalità sul moto: definizione di sistema
Pianificazione del moto tra ostacoli
 Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello
Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello
Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo tra di loro;
 (pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
(pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
Realizzazione di un software per la movimentazione di un manipolatore meccanico SCORTEC
 Università di Roma Tor Vergata Esercitazione di Robotica con laboratorio Realizzazione di un software per la movimentazione di un manipolatore meccanico SCORTEC Autori: Valerio Rossi Fabrizio Di Cicco
Università di Roma Tor Vergata Esercitazione di Robotica con laboratorio Realizzazione di un software per la movimentazione di un manipolatore meccanico SCORTEC Autori: Valerio Rossi Fabrizio Di Cicco
Robotica industriale. Richiami di statica del corpo rigido. Prof. Paolo Rocco
 Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Modellistica dei Manipolatori Industriali 01BTT Esame del 18/02/2002 Soluzione
 Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Spazi Vettoriali e Vettori
 Spazi Vettoriali e Vettori Basilio Bona DAUIN-Politecnico di Torino 2007 2008 Basilio Bona (DAUIN-Politecnico di Torino) Spazi Vettoriali e Vettori 2007 2008 1 / 20 Vettori e Spazi vettoriali Il concetto
Spazi Vettoriali e Vettori Basilio Bona DAUIN-Politecnico di Torino 2007 2008 Basilio Bona (DAUIN-Politecnico di Torino) Spazi Vettoriali e Vettori 2007 2008 1 / 20 Vettori e Spazi vettoriali Il concetto
Esercizi da fare a casa
 apitolo 1 Esercizi da fare a casa 1.1 Premesse I seguenti esercizi sono risolubili nella seconda settimana di corso. Per quelli del primo gruppo le soluzioni si possono estrarre dal mio libro di Esercizi
apitolo 1 Esercizi da fare a casa 1.1 Premesse I seguenti esercizi sono risolubili nella seconda settimana di corso. Per quelli del primo gruppo le soluzioni si possono estrarre dal mio libro di Esercizi
1 Distanza di un punto da una retta (nel piano)
") Esercizi 26/10/2007 1 Distanza di un punto da una retta (nel piano) Sia r = {ax + by + c = 0} una retta. Sia P = (p 1, p 2 ) R 2 un punto che non sta sulla retta r. Vogliamo vedere se si può parlare di
Esercizi 26/10/2007 1 Distanza di un punto da una retta (nel piano) Sia r = {ax + by + c = 0} una retta. Sia P = (p 1, p 2 ) R 2 un punto che non sta sulla retta r. Vogliamo vedere se si può parlare di
Grandezze scalari e vettoriali
 Grandezze scalari e vettoriali Per caratterizzare completamente una grandezza fisica, a volte è sufficiente dare soltanto un numero (scalare), mentre altre volte questo non è sufficiente. Massa, lunghezza,
Grandezze scalari e vettoriali Per caratterizzare completamente una grandezza fisica, a volte è sufficiente dare soltanto un numero (scalare), mentre altre volte questo non è sufficiente. Massa, lunghezza,
Controllo Adattativo
 Corso di Robotica 2 Controllo Adattativo Prof. Alessandro De Luca A. De Luca Motivazioni e approccio necessità dell adattamento nella legge di controllo incertezza sui parametri dinamici del robot scarsa
Corso di Robotica 2 Controllo Adattativo Prof. Alessandro De Luca A. De Luca Motivazioni e approccio necessità dell adattamento nella legge di controllo incertezza sui parametri dinamici del robot scarsa
Sistemi di produzione discreti. Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali. I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri I sistemi manifatturieri sono impianti
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri I sistemi manifatturieri sono impianti
Fondamenti per la Programmazione delle Macchine a Controllo Numerico
 Fondamenti per la Programmazione delle Macchine a Controllo Numerico Sistemi di Coordinate I sistemi di coordinate, permettono al programmatore di definire i punti caratteristici del profilo da lavorare.
Fondamenti per la Programmazione delle Macchine a Controllo Numerico Sistemi di Coordinate I sistemi di coordinate, permettono al programmatore di definire i punti caratteristici del profilo da lavorare.
Momento di una forza
 Momento di una forza Se è la forza che cambia il moto, cos è che cambia la rotazione? Momento, τ, di una forza, F : è un vettore definito come τ = r F. Il momento di una forza dipende dall origine e dal
Momento di una forza Se è la forza che cambia il moto, cos è che cambia la rotazione? Momento, τ, di una forza, F : è un vettore definito come τ = r F. Il momento di una forza dipende dall origine e dal
Cinematica differenziale inversa Statica
 Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
, c di modulo uguale sono disposti in modo da formare un triangolo equilatero come mostrato in fig. 15. Si chiarisca quanto vale l angolo formato da
 22 Tonzig Fondamenti di Meccanica classica ta) Un esempio di terna destra è la terna cartesiana x, y, z [34] Per il prodotto vettoriale vale la proprietà distributiva: a ( b c) = a b a c, ma non vale la
22 Tonzig Fondamenti di Meccanica classica ta) Un esempio di terna destra è la terna cartesiana x, y, z [34] Per il prodotto vettoriale vale la proprietà distributiva: a ( b c) = a b a c, ma non vale la