Pianificazione del moto tra ostacoli
|
|
|
- Davide Giannini
- 6 anni fa
- Visualizzazioni
Transcript

1 Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca



2 Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello spazio delle configurazioni (giunti) in azione nello spazio di lavoro (cartesiano) A. De Luca 2
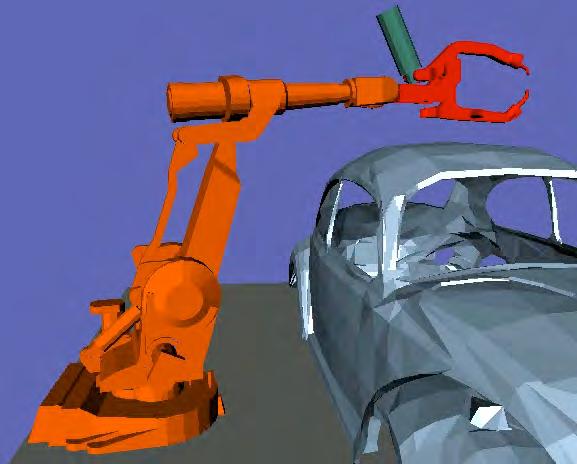
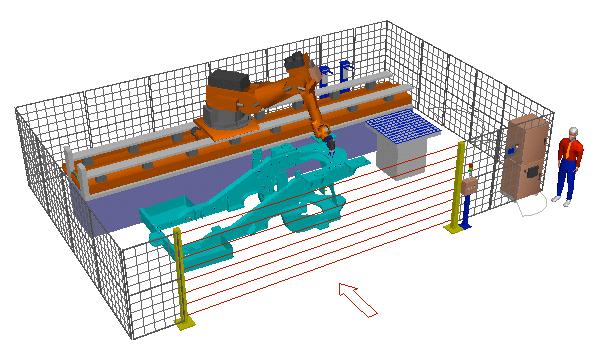

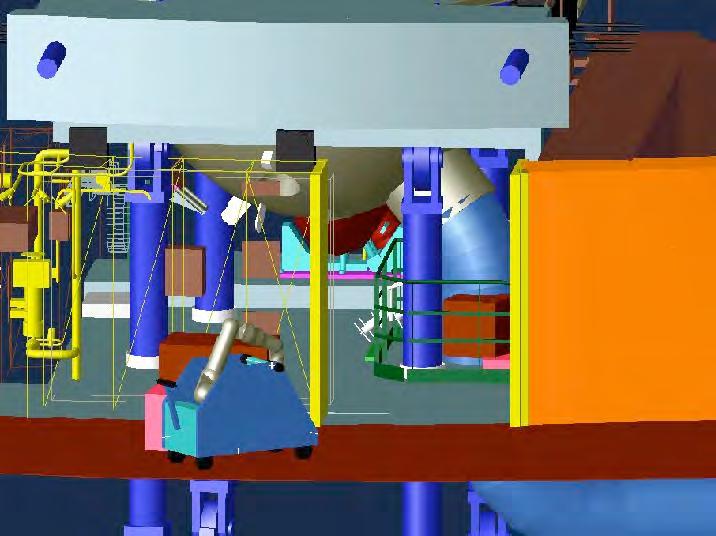
3 Robot industriali in celle con ostacoli A. De Luca 3




4 Robot mobili in ambienti non strutturati LAMA robot Hilare 2 robot A. De Luca 4
5 Esempi di applicazioni ambito industriale programmazione robot set up di cella robotizzata progetto di part feeders progetto CAD di parti per lavorazione manifatturiera progetto del layout e intervento (servicing) su tubi, cavi, robotica mobile autonoma esplorazione planetaria sorveglianza scouting di uso militare animazione grafica di attori digitali in video games, film, immersione in ambienti virtuali pianificazione di operazioni chirurgiche robotizzate generazione di configurazioni e moti compatibili per complessi molecolari docking folding A. De Luca 5
6 Obiettivi della pianificazione del moto determinare strategie di moto cammini geometrici privi di collisioni eventualmente, con contatti desiderati traiettorie temporali sequenze di comandi di moto sensor-based per realizzare compiti di alto livello spostare il robot fino ad un goal senza collisioni assemblare parti per ottenere un oggetto finale costruire una mappa dell ambiente localizzare un target nell ambiente A. De Luca 6
7 Assemblaggio disposizione iniziale e finale di oggetti descrizione geometrica sequenza di relazioni spaziali primitive di moto A. De Luca 7
8 Problema generale di pianificazione determinare (se esiste) un cammino privo di collisioni per un oggetto rigido o articolato (il robot) tra ostacoli (statici o dinamici) nell ambiente input geometria del robot e degli ostacoli cinematica del robot (gradi di libertà) configurazione iniziale e finale del robot output sequenza continua di configurazioni ammissibili che connette quella iniziale con quella finale A. De Luca 8
 A.")
9 Problema del piano mover singolo corpo rigido tridimensionale (nella formulazione originale, da spostare senza alzare = in 2D) A. De Luca 9
 A.")
10 Robot articolati corpo articolato con vari gradi di libertà (qui 5) A. De Luca 10
11 Robot mobili start ostacoli dinamici goal ostacoli statici singolo corpo con mobilità ristretta (WMR) a causa dei vincoli anolonomi (puro rotolamento delle ruote) A. De Luca 11

12 Problemi multi-robot 2 Pioneer 1 Nomad XR Hilare con manipolatore a bordo 5 robot in moto simultaneo A. De Luca 12

 robot")
13 Casi particolari di pianificazione robot 3R sotto-attuato (terzo giunto passivo) robot iper-ridondante A. De Luca 13
14 Il problema base N.B. locazione = posa = posizione + orientamento A. De Luca 14

15 Due possibili istanze A B 1 B 2 B 3 robot A rettangolare q=3 ostacoli robot A L-shaped q=2 ostacoli spazio di lavoro W = R 2 A. De Luca 15
16 Estensioni al problema base ostacoli mobili robot multipli oggetti spostabili (assemblaggio) oggetti deformabili (limp materials) vincoli anolonomi vincoli dinamici vincoli di stabilità pianificazione ottima diversi criteri informazioni da sensori costruzione di mappa/modello ricerca/inseguimento di oggetti ispezione incertezze nel modello nell esecuzione (controllo) nella percezione sensoriale moti sensorless integrazione di pianificazione e controllo integrazione con task planning di alto livello A. De Luca 16
17 Spazio delle configurazioni (C-Space) idea rappresentare il robot come un punto (configurazione del robot) in uno spazio opportuno (spazio delle configurazioni del robot o C-space) e determinare le immagini degli ostacoli in questo spazio (C-ostacoli) pianificazione del cammino di un punto A. De Luca 17
18 C-space di un corpo rigido F W y z B i B 1 A z y F A O A a x q B 2 W = R N spazio di lavoro (N = 2,3) A oggetto mobile (robot) B 1, B 2,, B i oggetti rigidi fissi in W F A terna (frame) mobile ( pos(a) = costante = P a ) F A F W terna fissa (del mondo) ( pos(a) = f(p a, pos(o A ) ) F W F W O W x (nessun vincolo cinematico o dinamico sulla mobilità) una configurazione q di A: posizione e orientamento di F A rispetto a F W spazio delle configurazioni di A: lo spazio C di tutte le configurazioni di A A(q) sottoinsieme (compatto) di W occupato da A nella configurazione q a(q) posizione di un punto a A in W, quando A è nella configurazione q A. De Luca 18
19 Rappresentazione di C rappresentazione parametrica (minima) di una configurazione q in R M posizione di O A in F W : vettore in R N orientamento di F A rispetto a F W : matrice di rotazione NxN M = dim C M = N(N+1) parametri (sovrabbondante!) SO(N) = Special Orthogonal Group : matrici NxN, ortonormali, determinante +1 l orientamento può però essere descritto in modo minimale da N(N-1)/2 parametri N = 2 (rotazione 2D): N = 3 (rotazione 3D): 1 parametro (l angolo di rotazione intorno all asse normale al piano) 3 parametri (ad es., angoli di Eulero) una rappresentazione minimale però non è iniettiva (la stessa configurazione è rappresentata da differenti valori degli angoli) A. De Luca 19
20 Esempi di dimensioni di C poligono in R 2 C: R 2 x SO(2) R 6 dim C = = 3 poliedro in R 3 C: R 3 x SO(3) R 12 dim C = = 6 manipolatore in R 2 C (R 2 x SO(2))x x(r 2 x SO(2)) R 6M con M giunti dim C = 3M - #vincoli imposti dai giunti = 3M - 2M = M manipolatore in R 3 C (R 3 x SO(3))x x(r 3 x SO(3)) R 12M con M giunti dim C = 6M - #vincoli imposti dai giunti = 6M - 5M = M robot mobile in R 2 C (R 2 x SO(2)) x (R 2 x SO(2)) R 12 con 1 rimorchio dim C = 6 - #vincoli imposti dall aggancio = 6-2 = 4 A. De Luca 20
 rappresentazione locale C = {(q 1,q 2 ): q 1 [0,2π), q 2 [0,2π)} corrispondenza biunivoca solo locale rappresentazione")
21 Località della rappresentazione rappresentare una configurazione come una lista di M parametri reali indipendenti corrisponde ad avere C = R (dim C) questa rappresentazione ha però validità solo locale esempio: manipolatore planare 2R R 2 è un toro (varietà topologica) rappresentazione locale C = {(q 1,q 2 ): q 1 [0,2π), q 2 [0,2π)} corrispondenza biunivoca solo locale rappresentazione topologicamente corretta A. De Luca 21
22 Metrica nel C-space per definire un cammino nel C-space è necessaria una nozione di continuità può essere introdotta specificando una funzione distanza d: C x C R la distanza ( 0) tra due configurazioni q e q deve andare a zero quando le regioni A(q) e A(q ) occupate dal corpo tendono a coincidere ad esempio d(q,q ) = max a A a(q) - a(q ) a fini algoritmici (locali), è meno oneroso usare d Eucl (q,q ) = q - q A. De Luca 22
23 Cammino in C un cammino in C da una configurazione q start ad una q goal è un applicazione continua τ : [0,1] C con τ(0) = q init, τ(1) = q goal se ogni coppia di configurazioni q start e q goal è connessa da un cammino C è connesso A è in moto libero in W in assenza di ostacoli, ogni cammino è ammissibile A. De Luca 23
24 C-ostacoli per definire un cammino privo di collisioni in C, occorre costruire le immagini degli ostacoli in C l immagine in C di ogni ostacolo B i in W è la regione CB i = {q C A(q) B i } C-ostacolo CB = i CB i regione dei C-ostacoli C free = C \ CB = {q C A(q) ( i CB i ) } q C free è una configurazione libera spazio libero delle configurazioni un cammino interamente C free è un cammino libero (semilibero se closure(c free ) ) problema base di pianificazione: generare un cammino libero tra due date configurazioni q start e q goal se appartengono alla stessa componente connessa di C free ; altrimenti, riportare un fallimento A. De Luca 24
 poligono generalizzato la frontiera è la")
25 Esempi di C-ostacoli robot puntiforme in R N C è una copia di W C-ostacoli sono copie degli ostacoli in W robot sferico (disco in R 2 ) o poliedrale (poligono in R 2 ) a orientamento costante in R N C è una copia di W C-ostacoli sono ottenuti per accrescimento degli ostacoli in W con la forma del robot (scorre sull ostacolo nell orientamento fissato) poligono generalizzato la frontiera è la curva descritta dall origine di F A cambia con la posizione di O A in A A. De Luca 25

26 Esempi di C-ostacoli ma cambia anche con l orientamento di A N.B. aumenta il numero di vertici! A. De Luca 26
 variazione orientamento A.")
27 Esempi di C-ostacoli robot poligonale libero di traslare e ruotare in R 2 C = R 2 x [0, 2π) C-ostacoli ottenuti per accrescimento composito (ripetuto per ogni valore dell orientamento del robot) variazione orientamento A. De Luca 27
28 Esempi di C-ostacoli robot 2R planare zona d ombra W = R 2 due tipi di C-ostacoli collisioni con ostacoli auto-collisioni CB 3 altre zone proibite sono causate dai fondo corsa ai giunti C CB 1 CB 2 A. De Luca 28
29 Esempi di C-ostacoli rappresentazione locale A. De Luca 29
30 Connessione di C-space C è connesso se un cammino tra tutte le coppie di configurazioni due cammini con gli stessi estremi sono omotopi se è possibile deformare con continuità uno nell altro C è semplicemente connesso se tutti i cammini tra due configurazioni sono omotopi tra loro altrimenti, C è molteplicemente connesso esempio: SO(3) è molteplicemente connesso, con due classi di cammini omotopi A. De Luca 30
 e ostacoli si valuta nello spazio di lavoro utilizzando eventualmente la cinematica diretta del robot articolato con")
31 Commenti finali per calcolare in modo esatto la regione dei C-ostacoli è necessario un modello algebrico degli ostacoli nello spazio di lavoro (dati disponibili in CAD) spesso sono convenienti approssimazioni o campionamenti la collisione tra robot (nella configurazione q) e ostacoli si valuta nello spazio di lavoro utilizzando eventualmente la cinematica diretta del robot articolato con algoritmi di collision check software efficienti: I-Collide (per poliedri convessi) o V-Collide non tutti i metodi di pianificazione richiedono la costruzione esplicita della regione dei C-ostacoli A. De Luca 31
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Robotica industriale. Richiami di statica del corpo rigido. Prof. Paolo Rocco
 Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Robotica industriale Richiami di statica del corpo rigido Prof. Paolo Rocco (paolo.rocco@polimi.it) Sistemi di forze P 1 P 2 F 1 F 2 F 3 F n Consideriamo un sistema di forze agenti su un corpo rigido.
Cinematica differenziale inversa Statica
 Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 5
 Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Corso di Robotica 1 Cinematica inversa
 Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Corso di Robotica 1 Cinematica inversa Prof. Alessandro De Luca Robotica 1 1 Problema cinematico inverso data una posa (posizione + orientamento) dell end-effector determinare l insieme di valori delle
Vettori e geometria analitica in R 3 1 / 25
 Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
PROGRAMMA EFFETTIVAMENTE SVOLTO
 A.S. 2015/2016 CLASSE 1 SEZ T PROGRAMMA EFFETTIVAMENTE SVOLTO DOCENTE Prof. Massimo Leone DISCIPLINA Informatica UDA1: Introduzione all Informatica. La rappresentazione delle informazioni Concetti elementari
A.S. 2015/2016 CLASSE 1 SEZ T PROGRAMMA EFFETTIVAMENTE SVOLTO DOCENTE Prof. Massimo Leone DISCIPLINA Informatica UDA1: Introduzione all Informatica. La rappresentazione delle informazioni Concetti elementari
SCUOLA PRIMARIA MATEMATICA (Classe 1ª)
") SCUOLA PRIMARIA MATEMATICA (Classe 1ª) Operare con i numeri nel calcolo scritto e mentale Leggere e scrivere numeri naturali in cifre e lettere. Contare in senso progressivo e regressivo. Raggruppare,
SCUOLA PRIMARIA MATEMATICA (Classe 1ª) Operare con i numeri nel calcolo scritto e mentale Leggere e scrivere numeri naturali in cifre e lettere. Contare in senso progressivo e regressivo. Raggruppare,
Un sistema di interazione uomo-robot per compiti di manipolazione mobile basato su realtà virtuale
 Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
Un sistema di interazione uomo-robot per compiti di manipolazione basato su realtà virtuale Tesi di laurea di: Relatore: Chiar.mo Prof. Stefano Caselli Correlatore: Dott. Ing. Jacopo Aleotti Università
di manipolatori seriali
 Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Università degli Studi di Bergamo Valentino Birolini 2
 INTRODUZIONE SOLIDEDGEDGE VALENTINO BIROLINI DIPARTIMENTO DI INGEGNERIA INDUSTRIALE SOLIDEDGEDGE Software di modellazione 3D Design by feature Definizione del modello per mezzo di primitive funzionali
INTRODUZIONE SOLIDEDGEDGE VALENTINO BIROLINI DIPARTIMENTO DI INGEGNERIA INDUSTRIALE SOLIDEDGEDGE Software di modellazione 3D Design by feature Definizione del modello per mezzo di primitive funzionali
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Concetti di punto materiale e corpo rigido
 Concetti di punto materiale e corpo rigido Il punto materiale è l elemento astratto più semplice che si può introdurre per studiare l equilibrio dei corpi Si può adottare tale schema in una prima fase
Concetti di punto materiale e corpo rigido Il punto materiale è l elemento astratto più semplice che si può introdurre per studiare l equilibrio dei corpi Si può adottare tale schema in una prima fase
Meccanica dei Manipolatori. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Informatica Generale 1 - Esercitazioni Flowgraph, algebra di Boole e calcolo binario
 Informatica Generale 1 - Esercitazioni Flowgraph, algebra di Boole e calcolo binario Daniele Pighin pighin@fbk.eu FBK Via Sommarive, 18 I-38050 Trento, Italy February 27, 2008 Outline 1 Algebra di Boole
Informatica Generale 1 - Esercitazioni Flowgraph, algebra di Boole e calcolo binario Daniele Pighin pighin@fbk.eu FBK Via Sommarive, 18 I-38050 Trento, Italy February 27, 2008 Outline 1 Algebra di Boole
Curricolo Verticale Scuola Secondaria di I Grado I. C. S. Via Libertà San Donato Milanese (MI) CLASSE PRIMA
 CLASSE PRIMA") CLASSE PRIMA TRAGUARDI per lo sviluppo delle competenze OBIETTIVI CONTENUTI al termine della classe 3 a Comprendere il significato logico dei numeri nell insieme N e rappresentarli sulla retta orientata.
CLASSE PRIMA TRAGUARDI per lo sviluppo delle competenze OBIETTIVI CONTENUTI al termine della classe 3 a Comprendere il significato logico dei numeri nell insieme N e rappresentarli sulla retta orientata.
Informatica Grafica. Un introduzione
 Informatica Grafica Un introduzione Rappresentare la Geometria Operabile da metodi di calcolo automatici Grafica Vettoriale Partiamo dalla rappresentazione di un punto... Spazi Vettoriale SPAZI VETTORIALI
Informatica Grafica Un introduzione Rappresentare la Geometria Operabile da metodi di calcolo automatici Grafica Vettoriale Partiamo dalla rappresentazione di un punto... Spazi Vettoriale SPAZI VETTORIALI
STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS
 STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS CORSO DI STUDIO IN INGEGNERIA ELETTRONICA LAUREA MAGISTRALE IN BIOINGEGNERIA (LM21) CORSO DI BIOMECCANICA A.A. 2015/16
STUDIO DELLA BIOMECCANICA DEL MOVIMENTO TRAMITE I SISTEMI OPTOELETTRONICI MARKLERLESS CORSO DI STUDIO IN INGEGNERIA ELETTRONICA LAUREA MAGISTRALE IN BIOINGEGNERIA (LM21) CORSO DI BIOMECCANICA A.A. 2015/16
1 Applicazioni lineari
 1 Applicazioni lineari 1 Applicazioni lineari 1.1 Definizione Si considerino lo spazio tridimensionale euclideo E e lo spazio vettoriale V ad esso associato. Definizione. 1.1. Sia A una applicazione di
1 Applicazioni lineari 1 Applicazioni lineari 1.1 Definizione Si considerino lo spazio tridimensionale euclideo E e lo spazio vettoriale V ad esso associato. Definizione. 1.1. Sia A una applicazione di
UNIVERSITA DEGLI STUDI DI PAVIA REGISTRO. DELLE LEZIONI-ESERCITAZIONI- SEMINARI Anno accademico 2011/12
 REGISTRO DELLE LEZIONI-ESERCITAZIONI- SEMINARI Anno accademico 2011/12 Cognome e Nome BISI FULVIO Qualifica RICERCATORE CONFERMATO MAT/07 Insegnamento di FISICA MATEMATICA (500474) Impartito presso: Corso
REGISTRO DELLE LEZIONI-ESERCITAZIONI- SEMINARI Anno accademico 2011/12 Cognome e Nome BISI FULVIO Qualifica RICERCATORE CONFERMATO MAT/07 Insegnamento di FISICA MATEMATICA (500474) Impartito presso: Corso
CURRICOLO DI MATEMATICA CLASSE PRIMA
 CURRICOLO DI MATEMATICA CLASSE PRIMA INDICATORI OBIETTIVI SPECIFICI CONTENUTI NUMERI Eseguire le quattro operazioni con i numeri interi. Elevare a potenza numeri naturali e interi. Comprendere il significato
CURRICOLO DI MATEMATICA CLASSE PRIMA INDICATORI OBIETTIVI SPECIFICI CONTENUTI NUMERI Eseguire le quattro operazioni con i numeri interi. Elevare a potenza numeri naturali e interi. Comprendere il significato
Istituto Comprensivo
 TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE MATEMATICA OBIETTIVI DI APPRENDIMENTO AL TERMINE DELLA OBIETTIVI DI APPRENDIMENTO AL TERMINE DELLA CLASSE TERZA SCUOLA PRIMARIA SCUOLA PRIMARIA ABILITA CONOSCENZE
TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE MATEMATICA OBIETTIVI DI APPRENDIMENTO AL TERMINE DELLA OBIETTIVI DI APPRENDIMENTO AL TERMINE DELLA CLASSE TERZA SCUOLA PRIMARIA SCUOLA PRIMARIA ABILITA CONOSCENZE
Rilevazione e isolamento
 Corso di Robotica 2 Rilevazione e isolamento I) di guasti degli attuatori II) di collisioni ambientali (con reazione) Prof. Alessandro De Luca A. De Luca Diagnosi dei guasti ( faults ) nella diagnosi dei
Corso di Robotica 2 Rilevazione e isolamento I) di guasti degli attuatori II) di collisioni ambientali (con reazione) Prof. Alessandro De Luca A. De Luca Diagnosi dei guasti ( faults ) nella diagnosi dei
PROGRAMMA A.S. 2014/2015
 MATERIA CLASSI DOCENTE LIBRI DI TESTO PROGRAMMA A.S. 2014/2015 MATEMATICA 1A tecnico Prof. VIGNOTTI Margherita Maria Dodero Baroncini Manfredi - Fragni Lineamenti. MATH VERDE, algebra 1 Ghisetti e Corvi
MATERIA CLASSI DOCENTE LIBRI DI TESTO PROGRAMMA A.S. 2014/2015 MATEMATICA 1A tecnico Prof. VIGNOTTI Margherita Maria Dodero Baroncini Manfredi - Fragni Lineamenti. MATH VERDE, algebra 1 Ghisetti e Corvi
Rappresentazione di Numeri Reali. Rappresentazione in virgola fissa (fixed-point) Rappresentazione in virgola fissa (fixed-point)
 Rappresentazione in virgola fissa (fixed-point)") Rappresentazione di Numeri Reali Un numero reale è una grandezza continua Può assumere infiniti valori In una rappresentazione di lunghezza limitata, deve di solito essere approssimato. Esistono due forme
Rappresentazione di Numeri Reali Un numero reale è una grandezza continua Può assumere infiniti valori In una rappresentazione di lunghezza limitata, deve di solito essere approssimato. Esistono due forme
Programma di matematica Classe: II BL Docente: Alessandra Mancini Anno scolastico: 2015/2016
 Programma di matematica Classe: II BL Docente: Alessandra Mancini Anno scolastico: 2015/2016 NUCLEI DISCIPLINARI OBIETTIVI SPECIFICI 1. RIPASSO Saper operare con: 0.1 scomposizioni 0.2 frazioni algebriche
Programma di matematica Classe: II BL Docente: Alessandra Mancini Anno scolastico: 2015/2016 NUCLEI DISCIPLINARI OBIETTIVI SPECIFICI 1. RIPASSO Saper operare con: 0.1 scomposizioni 0.2 frazioni algebriche
Introduzione. Michelangelo Laterza Principi di Statica e di Dinamica delle Strutture
 Introduzione La meccanica è quella parte delle scienze applicate che studia le forze ed il moto. In questo campo è fondamentale la nozione di equilibrio, ovvero la condizione che si instaura quando le
Introduzione La meccanica è quella parte delle scienze applicate che studia le forze ed il moto. In questo campo è fondamentale la nozione di equilibrio, ovvero la condizione che si instaura quando le
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Programma di matematica classe Prima
 Programma di matematica classe Prima RELAZIONI E FUNZIONI Insiemi Definizione e rappresentazione con diagrammi di Venn, per elencazione, per caratteristica. Operazioni tra insiemi: intersezione, unione,
Programma di matematica classe Prima RELAZIONI E FUNZIONI Insiemi Definizione e rappresentazione con diagrammi di Venn, per elencazione, per caratteristica. Operazioni tra insiemi: intersezione, unione,
Disegno di Macchine. corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana
 Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 9 Sistemi di Computer Aided Design (CAD) Introduzione Il Computer ha un ruolo molto importante
Disegno di Macchine corso per I anno della laurea in ing. meccanica Docente: ing. Francesca Campana Lezione n 9 Sistemi di Computer Aided Design (CAD) Introduzione Il Computer ha un ruolo molto importante
PIANO DI STUDIO DELLA DISCIPLINA MATEMATICA e COMPLEMENTI di MATEMATICA
 Tel. 0331635718 fax 0331679586 info@isisfacchinetti.it www.isisfacchinetti.it ISIS C.Facchinetti Sede: via Azimonti, 5 21053 Castellanza Modulo Gestione Qualità UNI EN ISO 9001 : 2008 PIANO STUDIO DELLA
Tel. 0331635718 fax 0331679586 info@isisfacchinetti.it www.isisfacchinetti.it ISIS C.Facchinetti Sede: via Azimonti, 5 21053 Castellanza Modulo Gestione Qualità UNI EN ISO 9001 : 2008 PIANO STUDIO DELLA
Liceo Scientifico Mariano IV d'arborea Oristano. Anno Scolastico Classe 1^B sportivo. Programma svolto di MATEMATICA
 Liceo Scientifico Mariano IV d'arborea Oristano Anno Scolastico 2015-16 Classe 1^B sportivo Programma svolto di MATEMATICA insegnante: Paolo Marongiu ALGEBRA Insiemi numerici I numeri naturali. Operazioni
Liceo Scientifico Mariano IV d'arborea Oristano Anno Scolastico 2015-16 Classe 1^B sportivo Programma svolto di MATEMATICA insegnante: Paolo Marongiu ALGEBRA Insiemi numerici I numeri naturali. Operazioni
Prerequisiti didattici
 Università degli Studi di Ferrara 2014-2015 Corso TFA - A048 Matematica applicata Didattica della matematica applicata all economia e alla finanza 1 aprile 2015 Appunti di didattica della matematica applicata
Università degli Studi di Ferrara 2014-2015 Corso TFA - A048 Matematica applicata Didattica della matematica applicata all economia e alla finanza 1 aprile 2015 Appunti di didattica della matematica applicata
GEOMETRIA. Elementi geometrici
 GEOMETRIA Elementi geometrici Ripasso dei principali elementi geometrici e relative definizioni A)Una scatola di gessetti, un barattolo, una palla sono corpi Ogni cosa che occupa uno spazio è, quindi un
GEOMETRIA Elementi geometrici Ripasso dei principali elementi geometrici e relative definizioni A)Una scatola di gessetti, un barattolo, una palla sono corpi Ogni cosa che occupa uno spazio è, quindi un
PROGRAMMAZIONE DI MATEMATICA 2016/2017
 PROGRAMMAZIONE DI MATEMATICA 2016/2017 PRIMA CLASSE ARITMETICA Il sistema di numerazione decimale Leggere e scrivere i numeri interi e decimali Riconoscere il valore posizionale delle cifre in un numero
PROGRAMMAZIONE DI MATEMATICA 2016/2017 PRIMA CLASSE ARITMETICA Il sistema di numerazione decimale Leggere e scrivere i numeri interi e decimali Riconoscere il valore posizionale delle cifre in un numero
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Modello dinamico dei robot:
 Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Corso di Robotica 2 Modello dinamico dei robot: analisi, estensioni, proprietà, identificazione, usi Prof. Alessandro De Luca A. De Luca Analisi accoppiamenti inerziali robot cartesiano robot cartesiano
Teoria dei Sistemi e Controlli Automatici M
 Teoria dei Sistemi e Controlli Automatici M 3 marzo 23 Figura : Prototipo di quadrirotore. Modello del Velivolo Si fissi un sistema di riferimento inerziale F i = {O i, i i, j i, k i } ed un sistema di
Teoria dei Sistemi e Controlli Automatici M 3 marzo 23 Figura : Prototipo di quadrirotore. Modello del Velivolo Si fissi un sistema di riferimento inerziale F i = {O i, i i, j i, k i } ed un sistema di
Operare con monomi e polinomi. Riconoscere utilizzare i prodotti notevoli. Risolvere espressioni letterali.
 GRIGLIA VALUTAZIONE PER DISCIPLINA ALGEBRA CLASSE 3 a COMPETENZE CONOSCENZE ABILITA DESCRITTORI di VOTO VOTO NUMERI I numeri relativi Si orienta nel tempo in modo: nel calcolo scritto meccanico e mentale
GRIGLIA VALUTAZIONE PER DISCIPLINA ALGEBRA CLASSE 3 a COMPETENZE CONOSCENZE ABILITA DESCRITTORI di VOTO VOTO NUMERI I numeri relativi Si orienta nel tempo in modo: nel calcolo scritto meccanico e mentale
Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo tra di loro;
 (pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
(pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
LICEO SCIENTIFICO - OPZIONE DELLE SCIENZE APPLICATE MATEMATICA
 LICEO SCIENTIFICO - OPZIONE DELLE SCIENZE APPLICATE MATEMATICA OBIETTIVI SPECIFICI DEL BIENNIO 1) utilizzare consapevolmente le tecniche e le procedure di calcolo basilari studiate; 2) riconoscere nei
LICEO SCIENTIFICO - OPZIONE DELLE SCIENZE APPLICATE MATEMATICA OBIETTIVI SPECIFICI DEL BIENNIO 1) utilizzare consapevolmente le tecniche e le procedure di calcolo basilari studiate; 2) riconoscere nei
Bilanciamento di tempi e costi Progetti a risorse limitate Note bibliografiche
 Indice Prefazione 1 1 Modelli di ottimizzazione 3 1.1 Modelli matematici per le decisioni.................... 4 1.1.1 Fasi di sviluppo di un modello................... 7 1.2 Esempi di problemi di ottimizzazione...................
Indice Prefazione 1 1 Modelli di ottimizzazione 3 1.1 Modelli matematici per le decisioni.................... 4 1.1.1 Fasi di sviluppo di un modello................... 7 1.2 Esempi di problemi di ottimizzazione...................
Prodotto scalare e prodotto vettoriale. Elisabetta Colombo
 Corso di Approfondimenti di Matematica Biotecnologie, Anno Accademico 2010-2011, http://users.mat.unimi.it/users/colombo/programmabio.html Vettori Vettori 1 2 3 4 di di Ricordiamo il in R n Dati a = (a
Corso di Approfondimenti di Matematica Biotecnologie, Anno Accademico 2010-2011, http://users.mat.unimi.it/users/colombo/programmabio.html Vettori Vettori 1 2 3 4 di di Ricordiamo il in R n Dati a = (a
TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE
 1.L alunno si muove con sicurezza sia nel calcolo scritto che mentale a partire dai numeri naturali fino a quelli reali; ne padroneggia le diverse rappresentazioni, stima la grandezza di un numero e il
1.L alunno si muove con sicurezza sia nel calcolo scritto che mentale a partire dai numeri naturali fino a quelli reali; ne padroneggia le diverse rappresentazioni, stima la grandezza di un numero e il
How to compute the sun vector for path planning
 How to compute the sun vector for path planning 1 Calcolo dell illuminazione delle celle solari Si consideri la Fig. 1. Il rover si sposta sulla mappa, variando nel tempo la sua posizione p = ( x y z )
How to compute the sun vector for path planning 1 Calcolo dell illuminazione delle celle solari Si consideri la Fig. 1. Il rover si sposta sulla mappa, variando nel tempo la sua posizione p = ( x y z )
Robotica educativa nell insegnamento del disegno tecnico
 Robotica educativa nell insegnamento del disegno tecnico Genova, 12 Novembre 2008 Carlo Nati Disegno geometrico: l oggetto e la sua rappresentazione grafica problemi di confronto tra modello grafico e
Robotica educativa nell insegnamento del disegno tecnico Genova, 12 Novembre 2008 Carlo Nati Disegno geometrico: l oggetto e la sua rappresentazione grafica problemi di confronto tra modello grafico e
PROGRAMMA DI MATEMATICA CONTENUTI.
 PROGRAMMA DI MATEMATICA CLASSE 1 a A commerciale L ISEGNANTE Dilena Calogero CONTENUTI. MODULO 1: INSIEMI NUMERICI E FUNZIONI (40 ore) I NUMERI NATURALI 1) Conoscere termini, simboli e definizioni riguardanti
PROGRAMMA DI MATEMATICA CLASSE 1 a A commerciale L ISEGNANTE Dilena Calogero CONTENUTI. MODULO 1: INSIEMI NUMERICI E FUNZIONI (40 ore) I NUMERI NATURALI 1) Conoscere termini, simboli e definizioni riguardanti
Programma di fisica. Classe 1^ sez. F A. S. 2015/2016. Docente: prof. ssa Laganà Filomena Donatella
 Programma di fisica. Classe 1^ sez. F A. S. 2015/2016 Docente: prof. ssa Laganà Filomena Donatella MODULO 1: LE GRANDEZZE FISICHE. Notazione scientifica dei numeri, approssimazione, ordine di grandezza.
Programma di fisica. Classe 1^ sez. F A. S. 2015/2016 Docente: prof. ssa Laganà Filomena Donatella MODULO 1: LE GRANDEZZE FISICHE. Notazione scientifica dei numeri, approssimazione, ordine di grandezza.
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico (ing. M. Troncossi)
") MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
Generazione di Numeri Casuali- Parte 2
 Esercitazione con generatori di numeri casuali Seconda parte Sommario Trasformazioni di Variabili Aleatorie Trasformazione non lineare: numeri casuali di tipo Lognormale Trasformazioni affini Numeri casuali
Esercitazione con generatori di numeri casuali Seconda parte Sommario Trasformazioni di Variabili Aleatorie Trasformazione non lineare: numeri casuali di tipo Lognormale Trasformazioni affini Numeri casuali
DESCRIZIONE DELLE ATTIVITÀ DEL CORSO
 DESCRIZIONE DELLE ATTIVITÀ DEL CORSO Modulo 1 - Colloquio conoscitivo e test d ingresso Lo scopo del primo modulo formativo è quello di acquisire il livello di conoscenza dei partecipanti alla progettazione
DESCRIZIONE DELLE ATTIVITÀ DEL CORSO Modulo 1 - Colloquio conoscitivo e test d ingresso Lo scopo del primo modulo formativo è quello di acquisire il livello di conoscenza dei partecipanti alla progettazione
Didattica della Matematica per il triennio Geometria sintetica e geometria analitica
 Didattica della Matematica per il triennio Geometria sintetica e geometria analitica anno acc. 2012/2013 Univ. degli Studi di Milano Cristina Turrini (Univ. degli Studi di Milano) Didattica della Matematica
Didattica della Matematica per il triennio Geometria sintetica e geometria analitica anno acc. 2012/2013 Univ. degli Studi di Milano Cristina Turrini (Univ. degli Studi di Milano) Didattica della Matematica
NAVIGAZIONE IN TEMPO REALE DI UN MANIPOLATORE ROBOTICO INDUSTRIALE IN PRESENZA DI OSTACOLI
 NAVIGAZIONE IN TEMPO REALE DI UN MANIPOLATORE ROBOTICO INDUSTRIALE IN PRESENZA DI OSTACOLI Francesca Ballan Relatori: Dott. Ing. Tullio Facchinetti Chiar.ma Prof.ssa Antonella Ferrara Correlatori: Chiar.mo
NAVIGAZIONE IN TEMPO REALE DI UN MANIPOLATORE ROBOTICO INDUSTRIALE IN PRESENZA DI OSTACOLI Francesca Ballan Relatori: Dott. Ing. Tullio Facchinetti Chiar.ma Prof.ssa Antonella Ferrara Correlatori: Chiar.mo
Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi
 PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi") Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi 1) Cinematica 1.1) Ripasso: Il moto rettilineo Generalità sul moto: definizione di sistema
Liceo Ginnasio Luigi Galvani Classe 3GHI (scientifica) PROGRAMMA di FISICA a.s. 2016/2017 Prof.ssa Paola Giacconi 1) Cinematica 1.1) Ripasso: Il moto rettilineo Generalità sul moto: definizione di sistema
Traguardi per lo sviluppo delle competenze. Obiettivi operativi. essenziali
 Traguardi per lo sviluppo delle competenze Nuclei tematici Obiettivi d apprendimento essenziali Obiettivi operativi Sviluppa un atteggiamento positivo rispetto alla matematica, attraverso esperienze significative,
Traguardi per lo sviluppo delle competenze Nuclei tematici Obiettivi d apprendimento essenziali Obiettivi operativi Sviluppa un atteggiamento positivo rispetto alla matematica, attraverso esperienze significative,
Caveat. Sintesi di Immagini. Sintesi di Immagini. Rendering: Approccio Fisico
 Sintesi di Immagini Metafora fondamentale Object vs viewer Object (scene): rappresentazione digitale (forma e caratteristiche) di un oggetto reale tridimensionale Viewer: strumento che permette di otternere
Sintesi di Immagini Metafora fondamentale Object vs viewer Object (scene): rappresentazione digitale (forma e caratteristiche) di un oggetto reale tridimensionale Viewer: strumento che permette di otternere
I FACOLTÀ DI INGEGNERIA - POLITECNICO DI BARI Corso di Laurea in Ingegneria Meccanica (corso A) A.A. 2009-2010, Esercizi di Geometria analitica
 A.A. 2009-2010, Esercizi di Geometria analitica") I FACOLTÀ DI INGEGNERIA - POLITECNICO DI BARI Corso di Laurea in Ingegneria Meccanica (corso A) A.A. 2009-2010, Esercizi di Geometria analitica Negli esercizi che seguono si suppone fissato nello spazio
I FACOLTÀ DI INGEGNERIA - POLITECNICO DI BARI Corso di Laurea in Ingegneria Meccanica (corso A) A.A. 2009-2010, Esercizi di Geometria analitica Negli esercizi che seguono si suppone fissato nello spazio
Studio dei meccanismi mediante i quali il movimento viene controllato.
 Studio dei meccanismi mediante i quali il movimento viene controllato. IL CONTROLLO MOTORIO (motor control) -pianificazione del movimento -controllo dell esecuzione del movimento Movimento: -movimento
Studio dei meccanismi mediante i quali il movimento viene controllato. IL CONTROLLO MOTORIO (motor control) -pianificazione del movimento -controllo dell esecuzione del movimento Movimento: -movimento
Per semplicità ci limitiamo al caso del moto in una o due dimensioni.
 PROBLEMA 1: una collisione tra meteoriti. Introduzione su alcuni concetti fondamentali di cinematica Prima di passare allo svolgimento risolutivo è opportuno puntualizzare alcuni concetti relativi allo
PROBLEMA 1: una collisione tra meteoriti. Introduzione su alcuni concetti fondamentali di cinematica Prima di passare allo svolgimento risolutivo è opportuno puntualizzare alcuni concetti relativi allo
PROGRAMMA CONSUNTIVO
 PAGINA: 1 PROGRAMMA CONSUNTIVO A.S.2014-2015 SCUOLA Liceo Linguistico Manzoni DOCENTE: Marina Barbàra MATERIA: Matematica e Informatica Classe 1 Sezione A OBIETTIVI: le parti sottolineate sono da considerarsi
PAGINA: 1 PROGRAMMA CONSUNTIVO A.S.2014-2015 SCUOLA Liceo Linguistico Manzoni DOCENTE: Marina Barbàra MATERIA: Matematica e Informatica Classe 1 Sezione A OBIETTIVI: le parti sottolineate sono da considerarsi
ISTITUTO SCOLASTICO COMPRENSIVO MINEO
 ISTITUTO SCOLASTICO COMPRENSIVO MINEO CURRICOLO DI MATEMATICA SCUOLA PRIMARIA Classe QUINTA INDICATORI NUMERI OBIETTIVI D'APPRENDIMENTO a. Leggere, scrivere, confrontare numeri decimali. b. Interpretare
ISTITUTO SCOLASTICO COMPRENSIVO MINEO CURRICOLO DI MATEMATICA SCUOLA PRIMARIA Classe QUINTA INDICATORI NUMERI OBIETTIVI D'APPRENDIMENTO a. Leggere, scrivere, confrontare numeri decimali. b. Interpretare
LICEO STATALE G. MAZZINI A.S Programmazione di Dipartimento Disciplina Asse Matematica e Fisica Matematica Matematico
 LICEO STATALE G. MAZZINI A.S. 2016-2017 Programmazione di Dipartimento Disciplina Asse Matematica e Fisica Matematica Matematico PROGRAMMAZIONE CLASSE 1 LICEO Competenze Abilità Contenuti UdA Operare con
LICEO STATALE G. MAZZINI A.S. 2016-2017 Programmazione di Dipartimento Disciplina Asse Matematica e Fisica Matematica Matematico PROGRAMMAZIONE CLASSE 1 LICEO Competenze Abilità Contenuti UdA Operare con
ISTITUTO COMPRENSIVO DI DONGO curricolo verticale per la scuola primaria Area di apprendimento: MATEMATICA
 IL NUMERO ISTITUTO COMPRENSIVO DI DONGO curricolo verticale per la scuola primaria Area di apprendimento: MATEMATICA - opera con numeri naturali e decimali - utilizza il calcolo scritto e mentale 1 2 ordinare
IL NUMERO ISTITUTO COMPRENSIVO DI DONGO curricolo verticale per la scuola primaria Area di apprendimento: MATEMATICA - opera con numeri naturali e decimali - utilizza il calcolo scritto e mentale 1 2 ordinare
Appunti del corso di Informatica 1 (IN110 Fondamenti) 2 Algoritmi e diagrammi di flusso
 2 Algoritmi e diagrammi di flusso") Università Roma Tre Dipartimento di Matematica e Fisica Corso di Laurea in Matematica Appunti del corso di Informatica 1 (IN110 Fondamenti) 2 Algoritmi e diagrammi di flusso Marco Liverani (liverani@mat.uniroma3.it)
Università Roma Tre Dipartimento di Matematica e Fisica Corso di Laurea in Matematica Appunti del corso di Informatica 1 (IN110 Fondamenti) 2 Algoritmi e diagrammi di flusso Marco Liverani (liverani@mat.uniroma3.it)
algebra: insiemi numerici N e Q +, proprietà operazioni e calcolo linguaggio degli insiemi
 Liceo B. Russell VIA IV NOVEMBRE 35, 3803 CLES Indirizzo: Scienze umane CLASSE Programmazione Didattica a. s. 00/0 UB Disciplina: Matematica Prof. Ore effettuate 08 + 6 recupero Carlo Bellio PROGRAMMA
Liceo B. Russell VIA IV NOVEMBRE 35, 3803 CLES Indirizzo: Scienze umane CLASSE Programmazione Didattica a. s. 00/0 UB Disciplina: Matematica Prof. Ore effettuate 08 + 6 recupero Carlo Bellio PROGRAMMA
Syllabus PEKIT CAD. Modulo Uno. Concetti di base
 1 Syllabus PEKIT CAD Modulo Uno Concetti di base 2.1 Cominciare a lavorare Campi di applicazioni del CAD Sistemi di disegno tecnico computerizzato (CAE, CAM, GIS) Autodesk e le versioni di AutoCAD, installazioni
1 Syllabus PEKIT CAD Modulo Uno Concetti di base 2.1 Cominciare a lavorare Campi di applicazioni del CAD Sistemi di disegno tecnico computerizzato (CAE, CAM, GIS) Autodesk e le versioni di AutoCAD, installazioni
Architettura Software di un Sistema di Controllo per Multirotore
 Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it
Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it
Programma di Robotica[LEGO EV3]
![Programma di Robotica[LEGO EV3]](/thumbs/39/19338690.jpg "Programma di Robotica[LEGO EV3]") Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Programma di Robotica[LEGO EV3] Target: 1. Alunni ultima classe scuola media inferiore per i quali sia possibile compiere un lavoro di potenziamento delle abilità per i livelli di eccellenza didattica
Modellazione Solida Feature Based Parametrico Associativa
 Knowledge Aided Engineering Manufacturing and Related Technologies METODI PER LA PROTOTIPAZIONE VIRTUALE DI PRODOTTI E PROCESSI Modellazione Solida Feature Based Parametrico Associativa Prof. Caterina
Knowledge Aided Engineering Manufacturing and Related Technologies METODI PER LA PROTOTIPAZIONE VIRTUALE DI PRODOTTI E PROCESSI Modellazione Solida Feature Based Parametrico Associativa Prof. Caterina
Introduzione alla programmazione Algoritmi e diagrammi di flusso. Sviluppo del software
 Introduzione alla programmazione Algoritmi e diagrammi di flusso F. Corno, A. Lioy, M. Rebaudengo Sviluppo del software problema idea (soluzione) algoritmo (soluzione formale) programma (traduzione dell
Introduzione alla programmazione Algoritmi e diagrammi di flusso F. Corno, A. Lioy, M. Rebaudengo Sviluppo del software problema idea (soluzione) algoritmo (soluzione formale) programma (traduzione dell
Esercizi Riepilogativi Svolti. = 1 = Or(v, w)
") Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Esercizi GEOMETRIA (Edile-Architettura e dell Edilizia FORMULE DI GEOMETRIA IN R TRASFORMAZIONI DI R CIRCONFERENZE Docente: Prof F Flamini
Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Esercizi GEOMETRIA (Edile-Architettura e dell Edilizia FORMULE DI GEOMETRIA IN R TRASFORMAZIONI DI R CIRCONFERENZE Docente: Prof F Flamini
SCIENZE MATEMATICHE. Finalità educative Area scientifico-tecnologica
 SCIENZE MATEMATICHE Finalità educative Area scientifico-tecnologica L alunno alla fine del primo ciclo dovrà essere in grado di: 1. Riflettere con spirito critico per poi affrontare in modo logico i vari
SCIENZE MATEMATICHE Finalità educative Area scientifico-tecnologica L alunno alla fine del primo ciclo dovrà essere in grado di: 1. Riflettere con spirito critico per poi affrontare in modo logico i vari
AUTORI COSTANZO CATERINA DE LUCA ELISABETTA MACCHERONI FEDERICO MANCINI SARA MORETTI MARGHERITA
 VARIETÀ DI RODONEE AUTORI COSTANZO CATERINA DE LUCA ELISABETTA MACCHERONI FEDERICO MANCINI SARA MORETTI MARGHERITA ABSTRACT. L articolo illustra alcune varianti costruite a partire da curve denominate
VARIETÀ DI RODONEE AUTORI COSTANZO CATERINA DE LUCA ELISABETTA MACCHERONI FEDERICO MANCINI SARA MORETTI MARGHERITA ABSTRACT. L articolo illustra alcune varianti costruite a partire da curve denominate
Grandezze angolari. Lineare Angolare Relazione x θ x = rθ. m I I = mr 2 F N N = rf sin θ 1 2 mv2 1
 Grandezze angolari Lineare Angolare Relazione x θ x = rθ v ω v = ωr a α a = αr m I I = mr 2 F N N = rf sin θ 1 2 mv2 1 2 Iω 2 Energia cinetica In forma vettoriale: v = ω r questa collega la velocità angolare
Grandezze angolari Lineare Angolare Relazione x θ x = rθ v ω v = ωr a α a = αr m I I = mr 2 F N N = rf sin θ 1 2 mv2 1 2 Iω 2 Energia cinetica In forma vettoriale: v = ω r questa collega la velocità angolare
CURRICOLO MATEMATICA - CLASSE QUARTA-
 CURRICOLO MATEMATICA - CLASSE QUARTA- COMPETENZA NUMERI 1. a) Acquisire il concetto di frazione b) riconoscere le frazioni decimali c) trasformare una frazione decimale in numero decimale e viceversa d)
CURRICOLO MATEMATICA - CLASSE QUARTA- COMPETENZA NUMERI 1. a) Acquisire il concetto di frazione b) riconoscere le frazioni decimali c) trasformare una frazione decimale in numero decimale e viceversa d)
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Classe Prima. Concetti topologici. Confronti Classificazioni Grafici. Confronti, ordinamenti e grandezze misurabili
 apprendimento ISTITUTO COMPRENSIVO STATALE Classe Prima ABILITA' Leggere e scrivere i numeri, usarli per contare ed eseguire semplici operazioni di addizione e sottrazione I numeri naturali nel loro aspetto
apprendimento ISTITUTO COMPRENSIVO STATALE Classe Prima ABILITA' Leggere e scrivere i numeri, usarli per contare ed eseguire semplici operazioni di addizione e sottrazione I numeri naturali nel loro aspetto
La Rappresentazione dell Informazione
 La Rappresentazione dell Informazione Parte III I codici Codici a.a. 27-28 Un codice è una funzione che associa ad una sequenza di simboli un significato Codice : {entità} {sequenze di simboli} Un codice
La Rappresentazione dell Informazione Parte III I codici Codici a.a. 27-28 Un codice è una funzione che associa ad una sequenza di simboli un significato Codice : {entità} {sequenze di simboli} Un codice
CURRICOLO DELLA SCUOLA SECONDARIA DI PRIMO GRADO DISCIPLINA: MATEMATICA CLASSE 1^
 CURRICOLO DELLA SCUOLA SECONDARIA DI PRIMO GRADO DISCIPLINA: MATEMATICA CLASSE 1^ Nucleo fondante 1: IL NUMERO Argomento 1: Sistemi di numerazione Sa rappresentare graficamente numeri, ordinarli e confrontarli.
CURRICOLO DELLA SCUOLA SECONDARIA DI PRIMO GRADO DISCIPLINA: MATEMATICA CLASSE 1^ Nucleo fondante 1: IL NUMERO Argomento 1: Sistemi di numerazione Sa rappresentare graficamente numeri, ordinarli e confrontarli.
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Cinematica Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale - a.a.
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Cinematica Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale - a.a.
DEFINIZIONE Un vettore (libero) è un ente geometrico rappresentato da un segmento orientato caratterizzato da tre parametri:
 è un ente geometrico rappresentato da un segmento orientato caratterizzato da tre parametri:") DEFINIZIONE Un vettore (libero) è un ente geometrico rappresentato da un segmento orientato caratterizzato da tre parametri: 1. modulo: la lunghezza del segmento 2. direzione: coincidente con la direzione
DEFINIZIONE Un vettore (libero) è un ente geometrico rappresentato da un segmento orientato caratterizzato da tre parametri: 1. modulo: la lunghezza del segmento 2. direzione: coincidente con la direzione
Numero OBIETTIVI DI APPRENDIMENTO ABILITÀ CONTENUTI Scoprire e costruire la successione numerica entro la classe delle unità semplici.
 CLASSE SECONDA MATEMATICA COMPETENZE Legge, esplora e descrive la realtà attraverso un appropriata cognizione del linguaggio matematico, che come gli altri linguaggi è costituito da una struttura di forme,
CLASSE SECONDA MATEMATICA COMPETENZE Legge, esplora e descrive la realtà attraverso un appropriata cognizione del linguaggio matematico, che come gli altri linguaggi è costituito da una struttura di forme,
R. Capone Analisi Matematica Integrali multipli
 Integrali multipli Consideriamo, inizialmente il caso degli integrali doppi. Il concetto di integrale doppio è l estensione della definizione di integrale per una funzione reale di una variabile reale
Integrali multipli Consideriamo, inizialmente il caso degli integrali doppi. Il concetto di integrale doppio è l estensione della definizione di integrale per una funzione reale di una variabile reale
PIANO DI LAVORO DEL DOCENTE prof. DIMONOPOLI A.S. 2014/2015 CLASSE 2ALS MATERIA: MATEMATICA
 PIANO DI LAVORO DEL DOCENTE prof. DIMONOPOLI A.S. 2014/2015 CLASSE 2ALS MATERIA: MATEMATICA Strategie didattiche: Lelezionifrontalisarannoassociateadelleesperienzedilaboratorioperaccompagnarelateoriae
PIANO DI LAVORO DEL DOCENTE prof. DIMONOPOLI A.S. 2014/2015 CLASSE 2ALS MATERIA: MATEMATICA Strategie didattiche: Lelezionifrontalisarannoassociateadelleesperienzedilaboratorioperaccompagnarelateoriae
L hardware da solo non è sufficiente per il funzionamento dell elaboratore È necessario introdurre il software:
 Il Software L hardware da solo non è sufficiente per il funzionamento dell elaboratore È necessario introdurre il software: un insieme di programmi che permettono di trasformare un insieme di circuiti
Il Software L hardware da solo non è sufficiente per il funzionamento dell elaboratore È necessario introdurre il software: un insieme di programmi che permettono di trasformare un insieme di circuiti
PROGRAMMAZIONE ANNUALE DI MATEMATICA - SCUOLA PRIMARIA IST. COMP. DON MILANI CERNUSCO S/N -
 MATEMATICA: PROGRAMMAZIONE CLASSE PRIMA UTILIZZARE I PER PROGRAMMAZIONE ANNUALE DI MATEMATICA - SCUOLA PRIMARIA IST. COMP. DON MILANI CERNUSCO S/N - 1.1 Risolvere, a livello orale o con l aiuto di una
MATEMATICA: PROGRAMMAZIONE CLASSE PRIMA UTILIZZARE I PER PROGRAMMAZIONE ANNUALE DI MATEMATICA - SCUOLA PRIMARIA IST. COMP. DON MILANI CERNUSCO S/N - 1.1 Risolvere, a livello orale o con l aiuto di una
Argomenti Capitolo 1 Richiami
 Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
2.3 Cammini ottimi. E. Amaldi Fondamenti di R.O. Politecnico di Milano 1
 . Cammini ottimi E. Amaldi Fondamenti di R.O. Politecnico di Milano .. Cammini minimi e algoritmo di Dijkstra Dato un grafo orientato G = (N, A) con una funzione di costo c : A c ij R e due nodi s e t,
. Cammini ottimi E. Amaldi Fondamenti di R.O. Politecnico di Milano .. Cammini minimi e algoritmo di Dijkstra Dato un grafo orientato G = (N, A) con una funzione di costo c : A c ij R e due nodi s e t,
Calcolo Algebrico. Primo grado. ax 2 + bx + c = 0. Secondo grado. (a 0) Equazioni e disequazioni in una incognita e coefficienti reali: ax + b = 0
 Equazioni e disequazioni in una incognita e coefficienti reali: ax + b = 0") Calcolo Algebrico Equazioni e disequazioni in una incognita e coefficienti reali: Primo grado ax + b = 0 (a 0) x = b a Secondo grado ax 2 + bx + c = 0 (a 0) Si hanno due soluzioni che possono essere reali
Calcolo Algebrico Equazioni e disequazioni in una incognita e coefficienti reali: Primo grado ax + b = 0 (a 0) x = b a Secondo grado ax 2 + bx + c = 0 (a 0) Si hanno due soluzioni che possono essere reali
Progetto e Realizzazione di un Robot a Cinematica Parallela per Applicazioni Mediche
 Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Analisi Numerica. Debora Botturi ALTAIR. Debora Botturi. Laboratorio di Sistemi e Segnali
 Analisi Numerica ALTAIR http://metropolis.sci.univr.it Argomenti Argomenti Argomenti Rappresentazione di sistemi con variabili di stato; Tecniche di integrazione numerica Obiettivo: risolvere sistemi di
Analisi Numerica ALTAIR http://metropolis.sci.univr.it Argomenti Argomenti Argomenti Rappresentazione di sistemi con variabili di stato; Tecniche di integrazione numerica Obiettivo: risolvere sistemi di
Funzioni vettoriali di variabile scalare
 Capitolo 11 Funzioni vettoriali di variabile scalare 11.1 Curve in R n Abbiamo visto (capitolo 2) come la posizione di un punto in uno spazio R n sia individuata mediante le n coordinate di quel punto.
Capitolo 11 Funzioni vettoriali di variabile scalare 11.1 Curve in R n Abbiamo visto (capitolo 2) come la posizione di un punto in uno spazio R n sia individuata mediante le n coordinate di quel punto.
Autorità per le Garanzie nelle Comunicazioni
 Autorità per le Garanzie nelle Comunicazioni METODO PER IL RENDERING DEI DIAGRAMMI DI IRRADIAZIONE VERTICALI BASATO SUI DATI PREVISTI DALLE SPECIFICHE DI FORMATO DEL CATASTO AGCOM 1. Premessa Per calcolare
Autorità per le Garanzie nelle Comunicazioni METODO PER IL RENDERING DEI DIAGRAMMI DI IRRADIAZIONE VERTICALI BASATO SUI DATI PREVISTI DALLE SPECIFICHE DI FORMATO DEL CATASTO AGCOM 1. Premessa Per calcolare
Mediatori didattici. 1) Insiemi ed elementi di un insieme Rappresentazione degli insiemi Sottoinsiemi Operazioni con gli insiemi
 Insiemi ed elementi di un insieme Rappresentazione degli insiemi Sottoinsiemi Operazioni con gli insiemi") ISTITUTO COMPRENSIVO DI CERESARA GAZOLDO PIUBEGA SCUOLA SECONDARIA DI PIUBEGA Anno scolastico 2014-2015 PROGRAMMAZIONE DI MATEMATICA CLASSE III A Destinatari: alunni classe III Traguardo formativo generale:
ISTITUTO COMPRENSIVO DI CERESARA GAZOLDO PIUBEGA SCUOLA SECONDARIA DI PIUBEGA Anno scolastico 2014-2015 PROGRAMMAZIONE DI MATEMATICA CLASSE III A Destinatari: alunni classe III Traguardo formativo generale: