MODELLO COMPLETO PER IL CONTROLLO. D r (s) U(s) Y (s) d m (t): disturbi misurabili. d r (t): disturbi non misurabili
|
|
|
- Alberta Poggi
- 6 anni fa
- Visualizzazioni
Transcript
1 MODELLO COMPLETO PER IL CONTROLLO D m (s) D r (s) Y o (s) U(s) P (s) Y (s) d m (t): disturbi misurabili d r (t): disturbi non misurabili y o (t): andamento desiderato della variabile controllata u(t): variabile di controllo P (s): funzione di trasferimento del processo Problema del controllo: determinare l ingresso u in modo che risulti y y 0.
2 CONTROLLO IN CATENA DIRETTA Soluzione in catena diretta. Ipotesi: processo a minima rotazione di fase (poli e zeri con parte reale minore di zero). D m (s) Y o (s) + U(s) (s) P1 1 (s) P 1 (s) P 2 (s) P 1 Y (s) Legge di controllo in assenza di disturbi non misurabili U(s) = 1 P (s) Y o (s) 1 P 1 (s) D m(s)
3 CONT. IN CATENA APERTA VS. CONT. IN RETROAZIONE + Y 0 (s) H(s) C ret (s) P (s) Y (s) Y 0 (s) C dir (s) P (s) Y (s) H(s) Ipotesi: i due schemi di controllo sono stabili internamente; le funzioni di trasferimento ingresso-uscita soddisfano: C ret P H 1 + C ret P H 1 C dir P 1
4 CONTR. IN CATENA APERTA VS. CONTR. IN RETROAZIONE Effetto di un disturbo d (non misurabile) sull uscita (y d e y n sono rispettivamente la risposta al disturbo d e all uscita desiderata y 0 )): controllo in catena diretta: controllo in retroazione: Y d Y n = Y d = 1 Y n C dir P 1 C ret P H D Y 0 D Y 0 D Y 0 << D Y 0 Effetto di una variazione parametrica P dell impianto P ( y è la variazione dell uscita dovuta a P ): controllo in catena diretta: Y Y n = P P controllo in retroazione: Y Y n = 1 P 1 + C ret P H P << P P
5 SCHEMA DI CONTROLLO IN RETROAZIONE COMPLETO D pi (s) D pu (s) Y o (s) R(s) + C(s) U(s) P (s) Y (s) H(s) D h (s) Problema del controllo: determinare la funzione di trasferimento C(s) del controllore in modo che l andamento di y(t) sia ragionevolmente vicino a y o (t) per ogni configurazione ammissibile dei disturbi.
6 SPECIFICHE DI CONTROLLO Condizione fondamentale: sistema stabile internamente ad anello chiuso. Classi di specifiche: Specifiche di precisione: rapporto desiderato fra il segnale di riferimento e l uscita; errori di inseguimento a regime per segnali tipici di ingresso; errori a regime dovuti a disturbi e/o variazioni parametriche. Specifiche di stabilità: limite alla massima sovraelongazione della risposta al gradino (picco di risonanza, margine di fase, coefficiente di smorzamento dei poli dominanti) Specifiche di velocità di risposta: limite al tempo di salita della risposta al gradino (tempo di ritardo, tempo di assestamento, banda passante)
7 SINTESI PER TENTATIVI: SPECIFICHE Al blocco in catena di retroazione H(s) spetta il compito di soddisfare al rapporto ingresso-uscita desiderato: H(s) = 1 K D se y o (t) = K D r(t) Le altre specifiche sono soddisfatte dal compensatore C(s) Specifiche tipiche: 1. Tipo del sistema di controllo: definisce l ingresso canonico per il quale si ha errore generalizzato a regime limitato e non nullo. 2. Entità di tale errore di regime permanente. 3. Sovroelongazione massima ŝ max. 4. Tempo di salita desiderato t 0 s Struttura del compensatore: C(s) = K c s h C (s) C (0) = 1 Altre specifiche: limite sull ampiezza del segnale di ingresso all impianto.
8 SINTESI PER TENTATIVI: DETERMINAZIONE DI K c e h Determinazione del tipo: Ordine massimo k r dell ingresso canonico per il quale si vuole un errore di inseguimento a regime limitato Ordine massimo ki d del disturbo canonico in ingresso all impianto per il quale si vuole un errore a regime limitato Ordine massimo ku d del disturbo canonico in uscita dall impianto per il quale si vuole un errore a regime limitato N p : numero dei poli in zero dell impianto Determinazione del guadagno di Bode: k r, k d i, k d u e N p Guadagno di Bode K p dell impianto Valore K D del rapporto ingresso-uscita desiderato
9 SPECIFICHE EQUIVALENTI SUL GUADAGNO D ANELLO Specifiche nel dominio del tempo ad anello chiuso: 1. ŝ ŝ max 2. t s = t o s Specifiche equivalenti nel dominio della frequenza ad anello chiuso ( W (s) ): 1. M r M rmax (1 + ŝ max )/[0.85, 1] 2. B 3 = B o 3 3/t o s Specifiche equivalenti nel dominio della frequenza ad anello aperto ( C(s)P (s)/k D ): 1. m φ m φ (carta di Nichols) 2. ω a = ω o a [0.5, 0.8]B o 3
10 SINTESI PER TENTATIVI: DETERMINAZIONE DI C (s) Forma guadagno d anello: L(s) = C (s)l (s) dove L (s) = K c s h P (s) K D Problema: dati il margine di fase desiderato m o φ e la pulsazione di attraversamento desiderata ω o a determinare C (s) in modo che: L(jω o a) db = 0 arg[l(jω o a)] + π = m o φ ovvero C (jω o a) db = L (jω o a) db arg[c (jω o a)] = m o φ arg[l (jω o a)] π
11 PRINCIPALI RETI CORRETTRICI: ANTICIPATRICE C (s) = 1 + sτ 1 + sτ/m, m > 1 Realizzazione circuitale: Valore dei parametri: τ = R 1 C, m = R 1 + R 2 R 2
12 PRINCIPALI RETI CORRETTRICI: RITARDATRICE C (s) = 1 + sτ/m, m > sτ Realizzazione circuitale: Valore dei parametri: τ = (R 1 + R 2 )C, m = R 1 + R 2 R 2
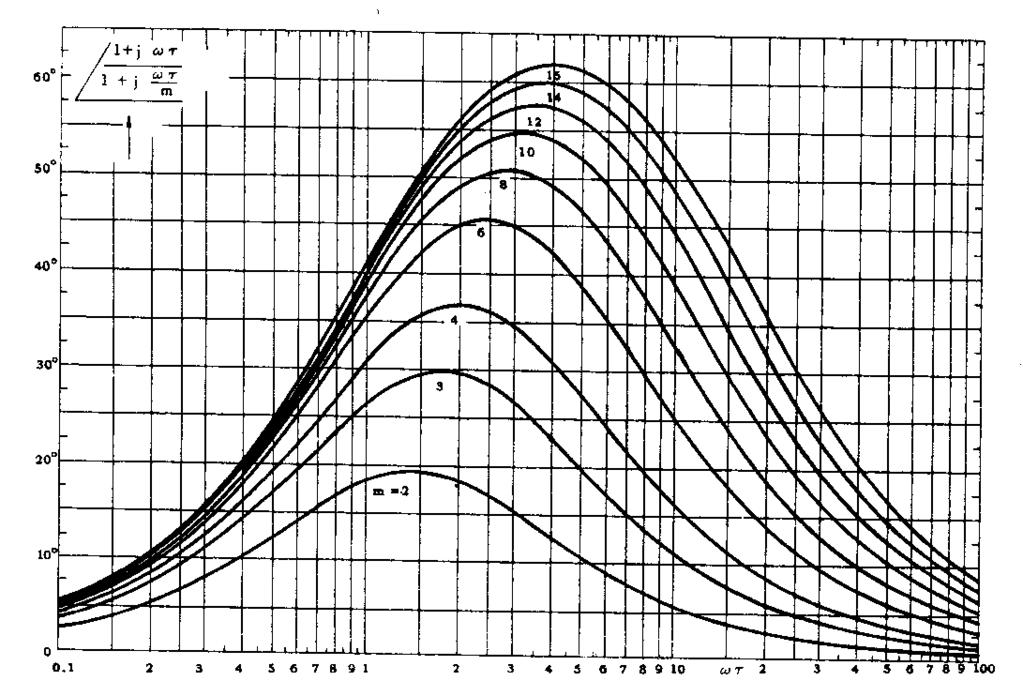

13 RETI CORRETTRICI: DIAGRAMMI DI BODE
14 IMPOSTAZIONE DI ω o a E m o φ Caso I L (jω o a) db 0 arg[l (jω o a)] + π m o φ Caso II L (jω o a) db 0 arg[l (jω o a)] + π m o φ
15 IMPOSTAZIONE DI ω o a E m o φ Caso III L (jω o a) db 0 arg[l (jω o a)] + π m o φ Caso IV L (jω o a) db 0 arg[l (jω o a)] + π m o φ
16 VERIFICA ULTERIORI SPECIFICHE Specifica sul massimo valore ammissibile per la funzione di trasferimento fra il riferimento e l ingresso dell impianto F (jω) db = C(jω) db 1 + C(jω)P (jω)h(jω) db M u Comportamento alle alte frequenze (disturbi) lim ω C(jω) db M u Specifica sull errore in uscita prodotto da disturbi sinusoidali. Disturbo sull uscita: d(t) = sin ω d t Specifica: C(jω d )P (jω d )H(jω d ) e d
17 SINTESI PER TENTATIVI: ESEMPIO θ o Potenz. + Compens. Motore Riduttore θ Potenz. Costante di trasduzione dei potenziometri: K p = 4 [V rad 1 ] Rapporto di riduzione: K r = 1 70 Motore in corrente continua a controllo di campo: P (s) = K m s(1 + sτ e )(1 + sτ m ) ; τ e = L e R e, τ m = J β, K m = K T R e β Valori parametri del motore: K m, τ e e τ m sono determinati sperimentalmente: K m = 65 [rad s 1 V 1 ]; τ m = 0.2 [s]; τ e = 0.03 [s] R e e J sono misurati direttamente: R e = 1.5 [Ω]; J = [kg m 2 ]
18 SINTESI PER TENTATIVI: ESEMPIO Specifiche di controllo: 1. l errore di inseguimento a regime corrispondente ad ingressi costanti sia nullo 2. l errore di inseguimento a regime corrispondente ad una rampa unitaria sia non superiore a e r = 0.01 [rad] 3. l errore a regime corrispondente ad un disturbo di coppia costante, sull asse del motore, di ampiezza pari a C d = 10 3 [kg m 2 s 2 ] sia non superiore a e d = 0.01 [rad] 4. il tempo di salita t o s sia approssimativamente pari a 0.2 [s] 5. il picco di risonanza sia non superiore a M rmax = 3 db Schema a blocchi C d θ o K p C(s) K r R e + sl e s(β + sj) K T θ K p Altri dati β = 10 4 [kg m 2 s 1 ]; L e = [H]; K T = [kg m 2 s 2 A 1 ]
19 SINTESI PER TENTATIVI: ESEMPIO Determinazione di K D K D è già assegnato e vale 1/K p C d θ o + 4 C(s) s s( s) 1 70 θ Il processo ha già un polo in zero per cui risulta h = 0 K c è fissato considerando le specifiche 2. e K c 3. K c Scelta: K c = 27 1 e r K p K m K r = 26.9 C d e d K p K m K r β = 3.85
20 SINTESI PER TENTATIVI: ESEMPIO θ o C (s) L (s) = s( s)( s) θ Scelta di m o φ e ω o a m o φ = 45 o ; ω o a = 10 Diagrammi di Bode di L (jω)
21 SINTESI PER TENTATIVI: ESEMPIO C (s) è data dal prodotto di una rete anticipatrice e una ritardatrice: C (s) = ( s) ( s) ( s) (1 + 5s) }{{}}{{} ANT.: m=6;τ =0.2 RIT.: m=10;τ =5 Diagrammi di Bode di L(jω) = C (jω)l (jω)
22 SINTESI PER TENTATIVI: ESEMPIO Verifica specifica sul picco di risonanza (carta di Nichols) Verifica specifica sul tempo di risposta (simulazione numerica)
23 SINTESI PER TENTATIVI: ESEMPIO Diagrammmi di Bode della W(s) Diagrammmi di Bode della funzioni di trasferimento disturbo-uscita e riferimento-ingresso
24 Luogo delle radici SINTESI PER TENTATIVI: ESEMPIO
25 TRACCIATORE GRAFICO X-Y Schema di un asse di un tracciatore grafico X-Y Dati relativi all amplificatore di tensione: G = guadagno = 5 ; d 1 = disturbo di offset sulla tensione = [V ]; Dati relativi al motore in corrente continua controllato di campo (corrente di armatura costante) e all albero: R e = resistenza dinamica del circuito eccitazione motore = 5 [Ω]; L e = induttanza del circuito eccitazione motore = 1 [H]; K T = costante di coppia del motore = 5 [N m A 1 ]; J m = momento di inerzia rotore + albero = 0.15 [Kg m 2 ]; β = coefficiente di attrito dell albero = 0.25 [N m s]; d 2 = disturbo di coppia = [N m].
26 TRACCIATORE GRAFICO X-Y Dati relativi all asse del tracciatore grafico: J p = momento di inerzia della puleggia P P = 0.05 [Kg m 2 ]; R = raggio della puleggia P P = [m]; CI = cinghia inestensibile; P U = punta tracciante. Specifiche. 1. K D = fattore di proporzionalitá riferimento-uscita = 1 [mv 1 ]; 2. e r = errore di inseguimento a regime alla rampa unitaria 0.05 [m]; 3. e d = errore a regime dovuto ai disturbi d 1 e d [m]; 4. 3 db W (jω) db 3 db per 0 ω 4 [rad s 1 ]; 5. F (jω) db 35 db per ω > 4 [rad s 1 ]. Nota: W (s) è la funzione di trasferimento fra il riferimento e la posizione di P U, mentre F (s) è la funzione di trasferimento fra il riferimento e la tensione di ingresso dell amplificatore.
27 TRACCIATORE GRAFICO X-Y Schema a blocchi dell impianto completo d 1 d 2 u G i e C m 1 ω 1 θ R e + sl e + β + sj s + ± K T R y Nota: J = J m + 2J p Schema a blocchi sistema di controllo (K D = 1) d 1 d 2 Y o + + ± + C(s) P 1 (s) P 2 (s) Y Nota: P 1 (s) = GK T R e sτ e ; P 2 (s) = R β 1 s(1 + sτ m )
28 TRACCIATORE GRAFICO X-Y Calcolo di h e K c dalle specifiche di precisione (2. e 3.): h = 0; K c 40 Determinazione della C (s) dalla specifica 4. B o 3 = 4 [rad s 1 ] = ω o a = 2.5 [rad s 1 ] M rmax = 3 db = m φ = 40 o (m o φ = 45 o ) Diagrammi di Bode guadagno d anello non compensato C (s) = ( s) ( s) }{{} ANT.: m=10; τ=1.2 (1 + 5s) (1 + 40s) }{{} RIT.: m=8; τ=40
29 TRACCIATORE GRAFICO X-Y Diagrammi di Bode guadagno d anello compensato Verifica condizioni 4. e 5. (diagrammi di Bode di W (s) e F (s))
30 INTERPRETAZIONE RETI CORRETTRICI CON IL L.D.R. Sistema di tipo 1 con polo reale (impianto tipico) L (s) = K s(1 + s/p), K, p > 0 Luogo delle radici di L (s) Luogo delle radici di C a(s)l (s) (C a(s) è definita da m a e τ a )
31 INTERPRETAZIONE RETI CORRETTRICI CON IL L.D.R. Luogo delle radici di C r(s)l (s) (C r(s) è definita da m r e τ r Effetto sui parametri della risposta al gradino del sistema ad anello chiuso delle due reti correttrici. rete anticipatrice: ζ a > ζ, ω na > ω n, aumento margine di stabilità aumento banda del sistema rete ritardatrice: ζ r < ζ, ω nr < ω n, diminuzione margine di stabilità diminuzione banda del sistema
32 EFFETTI RETE INTEGRATIVA (RITARDATRICE) Instabilità a seguito di una diminuzione del guadagno di Bode Sistemi di tipo 2: analisi con Nyquist, Bode e luogo delle radici Effetto coda: valore elevato del tempo di assestamento.
33 EFFETTI RETE DERIVATIVA (ANTICIPATRICE) Esaltazione dei disturbi in ingresso all impianto. Funzione di trasferimento riferimento-ingresso impianto: F (s) = C(s) 1 + C(s)P (s)h(s) Comportamento alle alte frequenze: lim F (jω) ω db = lim C(jω) ω db Se C(s) = K c C a(s)c r(s) risulta lim ω C(jω) db = 20 log 10 K c + 20 log 10 m a } {{ } Antic. 20 log 10 m r }{{} Ritar.
34 SINTESI PER TENTATIVI: CASI NON STANDARD Sistemi con più pulsazioni di attraversamento. Esempio: L (s) = s(1 + 10s) 1 + 2ζs + s2, ζ = 0.05 Specifiche: ω o a e m o φ (I): ω o a < 0.4 (II): ω o a > 0.4
35 SINTESI PER TENTATIVI: CASI NON STANDARD Sistemi stabili con zeri a parte reale maggiore di zero. Le relazioni per il passaggio da specifiche ad anello chiuso (tempofrequenza) a specifiche sull anello aperto hanno un grado di approssimazione minore. Esempio: L(s) = 0.5( s) s( s) }{{} C(s) (1 s) ( s) }{{} P (s) ω a 0.6; B 3 20; t s% = 2.1 Un caso speciale: sistemi con un elemento di ritardo.
36 SINTESI PER TENTATIVI: CASI NON STANDARD Dati T = 2 [s] Specifiche m o φ = 30 o ; ω o a = 1; K c = 1; Una soluzione C(s) = (1 + 3s) ( s) }{{} ANT.: m=8;τ =3 ( s) (1 + 20s) }{{} RIT.: m=3;τ =20
37 SINTESI PER TENTATIVI: CASI NON STANDARD Sistemi instabili ad anello aperto. Esempio: L (s) = 1 s(s 1) Diagramma di Nyquist e sua modifica. Diagrammi di Bode di L (s)
38 SINTESI PER TENTATIVI: CASI NON STANDARD Specifiche: ω o a = 2, m o φ = 30 o Compensatore: C(s) = s, Antic.: m = 10; τ = s Verifica diagrammi di Bode guadagno d anello compensato. Sistemi con poli e zeri a parte reale maggiore di zero: talvolta si deve ricorrere a compensatori instabili.
Per un corretto funzionamento dei sistema si progetta un controllo a retroazione secondo lo schema di figura.
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni 2001 Il candidato scelga e sviluppi una tra
Progetto del controllore
 Parte 10, 1 - Problema di progetto Parte 10, 2 Progetto del controllore Il caso dei sistemi LTI a tempo continuo Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Parte 10, 1 - Problema di progetto Parte 10, 2 Progetto del controllore Il caso dei sistemi LTI a tempo continuo Determinare in modo che il sistema soddisfi alcuni requisiti - Principali requisiti e diagrammi
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Esame di FONDAMENTI DI AUTOMATICA (9 crediti) Prova scritta 16 luglio 2014 SOLUZIONE ESERCIZIO 1. Dato il sistema con: si determinino gli autovalori della forma minima. Per determinare la forma minima
Prova scritta di Controlli Automatici e sistemi elettrici lineari
 Prova scritta di Controlli Automatici e sistemi elettrici lineari Corso di Laurea in Ingegneria Meccatronica, AA 202 203 7 Luglio 203 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta
Prova scritta di Controlli Automatici e sistemi elettrici lineari Corso di Laurea in Ingegneria Meccatronica, AA 202 203 7 Luglio 203 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta
Controlli Automatici T Regolatori PID
 Parte 10bis Aggiornamento: Settembre 2010 Parte 3, 1 Regolatori PID Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL: www-lar.deis.unibo.it/~lmarconi
Parte 10bis Aggiornamento: Settembre 2010 Parte 3, 1 Regolatori PID Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: lmarconi@deis.unibo.it URL: www-lar.deis.unibo.it/~lmarconi
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: luigi.biagiotti@unimore.it
SISTEMI AUTOMATICI ED ORGANIZZAZIONE DELLA PRODUZIONE STABILITA DEI SISTEMI CRITERIO DI BODE. ESERCIZI SUL CRITERIO DI BODE Completamente svolti
 SISTEMI AUTOMATICI ED ORGANIZZAZIONE DELLA PRODUZIONE STABILITA DEI SISTEMI CRITERIO DI BODE ESERCIZI SUL CRITERIO DI BODE Completamente svolti A cura del prof. Michele ZIMOTTI 1 Esercizi sulla stabilità
SISTEMI AUTOMATICI ED ORGANIZZAZIONE DELLA PRODUZIONE STABILITA DEI SISTEMI CRITERIO DI BODE ESERCIZI SUL CRITERIO DI BODE Completamente svolti A cura del prof. Michele ZIMOTTI 1 Esercizi sulla stabilità
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
I CONTROLLORI PID. Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi:
 I CONTROLLORI PID Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi: Blocco Proporzionale Blocco Integrale Blocco Derivativo Funzione
I CONTROLLORI PID Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi: Blocco Proporzionale Blocco Integrale Blocco Derivativo Funzione
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Sistemi Digitali di Controllo A.A. 9- p. /3 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it info@aracneeditrice.it via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
Graficazione qualitativa del luogo delle radici
 .. 5.3 1 Graficazione qualitativa del luogo delle radici Esempio. Si faccia riferimento al seguente sistema retroazionato: d(t) G(s) r(t) e(t) K 1(s 1) s(s + 1)(s + 8s + 5) y(t) Per una graficazione qualitativa
.. 5.3 1 Graficazione qualitativa del luogo delle radici Esempio. Si faccia riferimento al seguente sistema retroazionato: d(t) G(s) r(t) e(t) K 1(s 1) s(s + 1)(s + 8s + 5) y(t) Per una graficazione qualitativa
Regolatori standard LT-Cap. 11/ Appendice B
 Controllo Digitale a.a. 2006-2007 Regolatori standard LT-Cap. 11/ Appendice B Ing. Federica Pascucci Regolatori standard Regolatori: controllori che funzionano SOLO con ingressi costanti!!! Struttura fissa
Controllo Digitale a.a. 2006-2007 Regolatori standard LT-Cap. 11/ Appendice B Ing. Federica Pascucci Regolatori standard Regolatori: controllori che funzionano SOLO con ingressi costanti!!! Struttura fissa
Realizzazione digitale di controllori analogici
 Realizzazione digitale di controllori analogici Digitalizzazione di un controllore analogico Sistema di controllo r(t) uscita + - desiderata e(t) segnale di errore C(s) controllore analogico u(t) ingresso
Realizzazione digitale di controllori analogici Digitalizzazione di un controllore analogico Sistema di controllo r(t) uscita + - desiderata e(t) segnale di errore C(s) controllore analogico u(t) ingresso
OSCILLAZIONI SMORZATE E FORZATE
 OSCILLAZIONI SMORZATE E FORZATE Questo esperimento permette di studiare le oscillazioni armoniche di un pendolo e le oscillazioni smorzate e smorzate-forzate. Studiando il variare dell ampiezza dell oscillazione
OSCILLAZIONI SMORZATE E FORZATE Questo esperimento permette di studiare le oscillazioni armoniche di un pendolo e le oscillazioni smorzate e smorzate-forzate. Studiando il variare dell ampiezza dell oscillazione
Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
 Controlli Digitali Laurea Magistrale in Ingegneria Meccatronica CASO DI STUDIO: CONTROLLO DELLA TESTINA DI LETTURA/SCRITTURA DI UN HARD DISK Tel. 05 535 e-mail: secchi.cristian@unimore.it Il sistema La
Controlli Digitali Laurea Magistrale in Ingegneria Meccatronica CASO DI STUDIO: CONTROLLO DELLA TESTINA DI LETTURA/SCRITTURA DI UN HARD DISK Tel. 05 535 e-mail: secchi.cristian@unimore.it Il sistema La
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Soluzione del tema di: SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE anno scolastico 2002 2003
 Soluzione del tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE DELLA PRODUZIONE anno scolastico 2002 2003 a cura di: V. Savi P. Nasuti. Tanzi Premessa Il sistema di regolazione proposto è evidentemente di
Soluzione del tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE DELLA PRODUZIONE anno scolastico 2002 2003 a cura di: V. Savi P. Nasuti. Tanzi Premessa Il sistema di regolazione proposto è evidentemente di
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Fondamenti di Automatica - I Parte Il progetto del controllore
 Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: marcello.bonfe@unife.it pag. 1
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
buona efficacia nel controllo di molti processi industriali, in relazione a specifiche di prestazione poco stringenti
 : dispositivi ad ampia diffusione industriale che realizzano un algoritmo di controllo caratterizzato da tre azioni sull errore: Proporzionale Integrale - Derivativa Vantaggi: L algoritmo PID buona efficacia
: dispositivi ad ampia diffusione industriale che realizzano un algoritmo di controllo caratterizzato da tre azioni sull errore: Proporzionale Integrale - Derivativa Vantaggi: L algoritmo PID buona efficacia
REGOLATORI PID. Modello dei regolatori PID. Realizzazione dei regolatori PID. Metodi di taratura automatica
 REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI
REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI
Classe V specializzazione elettronica. Sistemi automatici
 Macro unità n 1 Classe V specializzazione elettronica Sistemi automatici Sistema di sviluppo Arduino e traduttori Gli studenti proseguono e approfondiscono lo studio dei sistemi a microcontrollore e del
Macro unità n 1 Classe V specializzazione elettronica Sistemi automatici Sistema di sviluppo Arduino e traduttori Gli studenti proseguono e approfondiscono lo studio dei sistemi a microcontrollore e del
Proprieta` dei sistemi in retroazione
 Proprieta` dei sistemi in retroazione Specifiche di controllo: errore a regime in risposta a disturbi costanti errore di inseguimento a regime quando il segnale di riferimento e` di tipo polinomiale sensibilita`
Proprieta` dei sistemi in retroazione Specifiche di controllo: errore a regime in risposta a disturbi costanti errore di inseguimento a regime quando il segnale di riferimento e` di tipo polinomiale sensibilita`
POLITECNICO DI MILANO
 POLITECNICO DI MILANO www.polimi.it ELETTRONICA per ingegneria BIOMEDICA prof. Alberto TOSI Sommario Caratteristiche degli OpAmp OpAmp ideali e Retroazione Offset di tensione e di corrente Alimentazione
POLITECNICO DI MILANO www.polimi.it ELETTRONICA per ingegneria BIOMEDICA prof. Alberto TOSI Sommario Caratteristiche degli OpAmp OpAmp ideali e Retroazione Offset di tensione e di corrente Alimentazione
Progetto di un sistema di controllo nel dominio della frequenza
 Contents Progetto di un sistema di controllo nel dominio della frequenza 3. Le specifiche del progetto nel dominio della frequenza......... 3.2 Sintesi del controllore........................... 6.3 Determinazione
Contents Progetto di un sistema di controllo nel dominio della frequenza 3. Le specifiche del progetto nel dominio della frequenza......... 3.2 Sintesi del controllore........................... 6.3 Determinazione
DIPLOMA A DISTANZA IN INGEGNERIA ELETTRICA CORSO DI ELETTRONICA INDUSTRIALE DI POTENZA II Lezione 36
 DIPLOMA A DISTANZA IN INGEGNERIA ELETTRICA CORSO DI ELETTRONICA INDUSTRIALE DI POTENZA II Lezione 36 Flicker e metodologie di attenuazione Paolo Mattavelli Dipartimento di Ingegneria Elettrica Universitá
DIPLOMA A DISTANZA IN INGEGNERIA ELETTRICA CORSO DI ELETTRONICA INDUSTRIALE DI POTENZA II Lezione 36 Flicker e metodologie di attenuazione Paolo Mattavelli Dipartimento di Ingegneria Elettrica Universitá
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it
Teoria dei Sistemi e Controlli Automatici M
 Teoria dei Sistemi e Controlli Automatici M 3 marzo 23 Figura : Prototipo di quadrirotore. Modello del Velivolo Si fissi un sistema di riferimento inerziale F i = {O i, i i, j i, k i } ed un sistema di
Teoria dei Sistemi e Controlli Automatici M 3 marzo 23 Figura : Prototipo di quadrirotore. Modello del Velivolo Si fissi un sistema di riferimento inerziale F i = {O i, i i, j i, k i } ed un sistema di
Prova scritta di Controlli Automatici
 Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA 2011 2012 10 Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare
Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA 2011 2012 10 Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare
Attrito statico e attrito dinamico
 Forza di attrito La presenza delle forze di attrito fa parte dell esperienza quotidiana. Se si tenta di far scorrere un corpo su una superficie, si sviluppa una resistenza allo scorrimento detta forza
Forza di attrito La presenza delle forze di attrito fa parte dell esperienza quotidiana. Se si tenta di far scorrere un corpo su una superficie, si sviluppa una resistenza allo scorrimento detta forza
FONDAMENTI DI AUTOMATICA (Ingegneria Gestionale) Prof. Matteo Corno
 Prof. Matteo Corno") POLITECNICO DI MILANO FONDAMENTI DI AUTOMATICA (Ingegneria Gestionale) Anno Accademico 2014/15 Seconda Prova in Itinere 12/02/2015 COGNOME... NOME... MATRICOLA... FIRMA.... Verificare che il fascicolo
POLITECNICO DI MILANO FONDAMENTI DI AUTOMATICA (Ingegneria Gestionale) Anno Accademico 2014/15 Seconda Prova in Itinere 12/02/2015 COGNOME... NOME... MATRICOLA... FIRMA.... Verificare che il fascicolo
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
Differenziazione sistemi dinamici
 Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
CONTROLLORI STANDARD PID. Guido Vagliasindi Controlli Automatici A.A. 06/07 Controllori Standard PID
 ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
R = 2.2 kω / 100 kω Tensione di alimentazione picco-picco ε = 2 V (R int = 600 Ω)
") Strumentazione: oscilloscopio, generatore di forme d onda (utilizzato con onde sinusoidali), 2 sonde, basetta, componenti R,L,C Circuito da realizzare: L = 2 H (±10%) con resistenza in continua di R L
Strumentazione: oscilloscopio, generatore di forme d onda (utilizzato con onde sinusoidali), 2 sonde, basetta, componenti R,L,C Circuito da realizzare: L = 2 H (±10%) con resistenza in continua di R L
ANTITRASFORMATA DI LAPLACE MODI DI UN SISTEMA
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANTITRASFORMATA DI LAPLACE MODI DI UN SISTEMA Ing. Federica Grossi Tel.
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANTITRASFORMATA DI LAPLACE MODI DI UN SISTEMA Ing. Federica Grossi Tel.
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
Servomeccanismi 1. Cassa. Albero. 1. Il motore elettrico in corrente continua
 Servomeccanismi 1 1. Il motore elettrico in corrente continua Descrizione fisica Il motore è contenuto in una cassa che in genere è cilindrica. Da una base del cilindro fuoriesce l albero motore; sulla
Servomeccanismi 1 1. Il motore elettrico in corrente continua Descrizione fisica Il motore è contenuto in una cassa che in genere è cilindrica. Da una base del cilindro fuoriesce l albero motore; sulla
Sistemi di controllo industriali
 Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Modelli di sistemi elementari. (Fondamenti di Automatica G. Ferrari Trecate)
") Modelli di sistemi elementari (Fondamenti di Automatica G. Ferrari Trecate) Circuiti elettrici Resistore R i resistenza corrente v tensione v = Ri( Induttore L i induttanza corrente v tensione L i! = v(
Modelli di sistemi elementari (Fondamenti di Automatica G. Ferrari Trecate) Circuiti elettrici Resistore R i resistenza corrente v tensione v = Ri( Induttore L i induttanza corrente v tensione L i! = v(
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 2009-2010 p. 1/50 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma1.it Lucidi tratti dal libro C. Bonivento,
Sistemi Digitali di Controllo A.A. 2009-2010 p. 1/50 SISTEMI DIGITALI DI CONTROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma1.it Lucidi tratti dal libro C. Bonivento,
Esercizi sui sistemi trifase
 Esercizi sui sistemi trifase Esercizio : Tre carichi, collegati ad una linea trifase che rende disponibile una terna di tensioni concatenate simmetrica e diretta (regime C, frequenza 50 Hz, valore efficace
Esercizi sui sistemi trifase Esercizio : Tre carichi, collegati ad una linea trifase che rende disponibile una terna di tensioni concatenate simmetrica e diretta (regime C, frequenza 50 Hz, valore efficace
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: lbiagiotti@deis.unibo.it http://www-lar.deis.unibo.it/~lbiagiotti
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
ELETTRONICA II. Prof. Dante Del Corso - Politecnico di Torino. Parte E: Circuiti misti analogici e digitali Lezione n. 23 - E - 5:
 ELETTRONICA II Prof. Dante Del Corso - Politecnico di Torino Parte E: Circuiti misti analogici e digitali Lezione n. 23 - E - 5: Oscillatori a quarzo Astabili e multivibratori Elettronica II - Dante Del
ELETTRONICA II Prof. Dante Del Corso - Politecnico di Torino Parte E: Circuiti misti analogici e digitali Lezione n. 23 - E - 5: Oscillatori a quarzo Astabili e multivibratori Elettronica II - Dante Del
Trasmissione con cinghie
 Trasmissione con cinghie La flessibilità e la leggerezza delle cinghie sono sfruttate per trasmissioni tra alberi distanti tra loro e comunque disposti. I tipi di cinghie adoperati oggi sono le cinghie
Trasmissione con cinghie La flessibilità e la leggerezza delle cinghie sono sfruttate per trasmissioni tra alberi distanti tra loro e comunque disposti. I tipi di cinghie adoperati oggi sono le cinghie
Richiami sulle oscillazioni smorzate
 Richiami sulle oscillazioni smorzate Il moto armonico è il moto descritto da un oscillatore armonico, cioè un sistema meccanico che, quando perturbato dalla sua posizione di equilibrio, è soggetto ad una
Richiami sulle oscillazioni smorzate Il moto armonico è il moto descritto da un oscillatore armonico, cioè un sistema meccanico che, quando perturbato dalla sua posizione di equilibrio, è soggetto ad una
ELETTRONICA CdS Ingegneria Biomedica
 ELEONICA CdS Ingegneria Biomedica LEZIONE A.03 Circuiti a diodi: configurazioni, analisi, dimensionamento addrizzatori a semplice e doppia semionda addrizzatori a filtro (L, C e LC) Moltiplicatori di tensione
ELEONICA CdS Ingegneria Biomedica LEZIONE A.03 Circuiti a diodi: configurazioni, analisi, dimensionamento addrizzatori a semplice e doppia semionda addrizzatori a filtro (L, C e LC) Moltiplicatori di tensione
Modellistica e controllo dei motori in corrente continua
 Modellistica e controllo dei motori in corrente continua Note per le lezioni del corso di Controlli Automatici A.A. 2008/09 Prof.ssa Maria Elena Valcher 1 Modellistica Un motore in corrente continua si
Modellistica e controllo dei motori in corrente continua Note per le lezioni del corso di Controlli Automatici A.A. 2008/09 Prof.ssa Maria Elena Valcher 1 Modellistica Un motore in corrente continua si
REGOLATORI STANDARD O PID
 REGOLATORI STANDARD O ID Consideriamo il classico esempio di compensazione in cascata riportato in figura, comprendente il plant o sistema controllato con funzione di trasferimento G (s), il regolatore
REGOLATORI STANDARD O ID Consideriamo il classico esempio di compensazione in cascata riportato in figura, comprendente il plant o sistema controllato con funzione di trasferimento G (s), il regolatore
Controllo Digitale - A. Bemporad - A.a. 2007/08
 Controllo di sistemi con saturazione (tecniche di anti-windup) controllore lineare Kx(k) saturazione Problema del Windup u(k) processo x(k) La maggior parte dei sistemi di controllo viene progettata utilizzando
Controllo di sistemi con saturazione (tecniche di anti-windup) controllore lineare Kx(k) saturazione Problema del Windup u(k) processo x(k) La maggior parte dei sistemi di controllo viene progettata utilizzando
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO
 A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
Modello fisico. Capitolo 1. 1.1 Descrizione del sistema
 Introduzione Lo scopo di questa trattazione è quello di analizzare un sistema fisico (veicolo a trazione elettrica) e progettare un adeguato sistema di controllo. Per cercare di ottenere risultati simili
Introduzione Lo scopo di questa trattazione è quello di analizzare un sistema fisico (veicolo a trazione elettrica) e progettare un adeguato sistema di controllo. Per cercare di ottenere risultati simili
L amplificatore operazionale
 L amplificatore operazionale terminali di input terminale di output Alimentazioni: massa nodo comune L amplificatore operazionale ideale Applichiamo 2 tensioni agli input 1 e 2 L amplificatore è sensibile
L amplificatore operazionale terminali di input terminale di output Alimentazioni: massa nodo comune L amplificatore operazionale ideale Applichiamo 2 tensioni agli input 1 e 2 L amplificatore è sensibile
(Link al materiale in formato html)
") Materiale didattico realizzato dal Prof. Giancarlo Fionda insegnante di elettronica. Di seguito è mostrato l'elenco degli argomenti trattati (indice delle dispense): (Link al materiale in formato html)
Materiale didattico realizzato dal Prof. Giancarlo Fionda insegnante di elettronica. Di seguito è mostrato l'elenco degli argomenti trattati (indice delle dispense): (Link al materiale in formato html)
Dr. Stefano Sarti Dipartimento di Fisica
 UNIVERSITÀ DI ROMA LA SAPIENZA FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria per l Ambiente e il Territorio ESAME DI FISICA GENERALE II DM 270) Data: 8/9/202. In un disco uniformemente carico di
UNIVERSITÀ DI ROMA LA SAPIENZA FACOLTÀ DI INGEGNERIA Corso di Laurea in Ingegneria per l Ambiente e il Territorio ESAME DI FISICA GENERALE II DM 270) Data: 8/9/202. In un disco uniformemente carico di
Criteri di stabilità (ver. 1.2)
") Criteri di stabilità (ver. 1.2) 1 1.1 Il concetto di stabilità Il concetto di stabilità è piuttosto generale e può essere definito in diversi contesti. Per i problemi di interesse nell area dei controlli
Criteri di stabilità (ver. 1.2) 1 1.1 Il concetto di stabilità Il concetto di stabilità è piuttosto generale e può essere definito in diversi contesti. Per i problemi di interesse nell area dei controlli
La corrente alternata
 La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
Indice generale. Presentazione dell edizione italiana... ix. Prefazione... xi
 Presentazione dell edizione italiana... ix Prefazione... xi Capitolo 1 Analisi di circuiti in corrente continua con PSpice... 1 Analisi di un circuito serie... 1 Legge di Kirchhoff delle tensioni per circuiti
Presentazione dell edizione italiana... ix Prefazione... xi Capitolo 1 Analisi di circuiti in corrente continua con PSpice... 1 Analisi di un circuito serie... 1 Legge di Kirchhoff delle tensioni per circuiti
I seguenti grafici rappresentano istantanee dell onda di equazione:
 Descrizione matematica di un onda armonica La descrizione matematica di un onda è data dalla seguente formula : Y ; t) A cos( k ω t + ϕ ) () ( ove ω e k, dette rispettivamente pulsazione e numero d onda,
Descrizione matematica di un onda armonica La descrizione matematica di un onda è data dalla seguente formula : Y ; t) A cos( k ω t + ϕ ) () ( ove ω e k, dette rispettivamente pulsazione e numero d onda,
Equazioni, funzioni e algoritmi: il metodo delle secanti
 Equazioni, funzioni e algoritmi: il metodo delle secanti Christian Ferrari 1 Introduzione La risoluzione di equazioni in R ci ha mostrato che solo per le equazioni polinomiali di primo e secondo grado,
Equazioni, funzioni e algoritmi: il metodo delle secanti Christian Ferrari 1 Introduzione La risoluzione di equazioni in R ci ha mostrato che solo per le equazioni polinomiali di primo e secondo grado,
Esercizio C2.1 - Acquisizione dati: specifiche dei blocchi
 Esercizio C2.1 - Acquisizione dati: specifiche dei blocchi È dato un segnale analogico avente banda 2 khz e dinamica compresa tra -2 V e 2V. Tale segnale deve essere convertito in segnale digitale da un
Esercizio C2.1 - Acquisizione dati: specifiche dei blocchi È dato un segnale analogico avente banda 2 khz e dinamica compresa tra -2 V e 2V. Tale segnale deve essere convertito in segnale digitale da un
SENSORE PER LA MISURA DEL RUMORE (IL FONOMETRO)
") SENSORE PER LA MISURA DEL RUMORE (IL FONOMETRO) Il fonometro è un dispositivo elettroacustico per la misura del livello di pressione sonora. La sua funzione principale p è quella di convertire un segnale
SENSORE PER LA MISURA DEL RUMORE (IL FONOMETRO) Il fonometro è un dispositivo elettroacustico per la misura del livello di pressione sonora. La sua funzione principale p è quella di convertire un segnale
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
Tensioni e corrente variabili
 Tensioni e corrente variabili Spesso, nella pratica, le tensioni e le correnti all interno di un circuito risultano variabili rispetto al tempo. Se questa variabilità porta informazione, si parla spesso
Tensioni e corrente variabili Spesso, nella pratica, le tensioni e le correnti all interno di un circuito risultano variabili rispetto al tempo. Se questa variabilità porta informazione, si parla spesso
Classe IV specializzazione elettronica. Elettrotecnica ed elettronica
 Macro unità n 1 Classe IV specializzazione elettronica Elettrotecnica ed elettronica Reti elettriche, segnali e diodi Leggi fondamentali: legge di Ohm, principi di Kirchhoff, teorema della sovrapposizione
Macro unità n 1 Classe IV specializzazione elettronica Elettrotecnica ed elettronica Reti elettriche, segnali e diodi Leggi fondamentali: legge di Ohm, principi di Kirchhoff, teorema della sovrapposizione
P: potenza in kw, n: numero di giri R: raggio puleggia in metri B = 1,1 b + 10 mm dove: B: larghezza corona l = B dove l : lunghezza mozzo puleggia
 ESERCIZIO Si deve provvedere all accoppiamento, con un riduttore a ruote dentate cilindriche a denti diritti, tra un motore asincrono trifase e un albero, rappresentato nello schema, che a sua volta trasmette
ESERCIZIO Si deve provvedere all accoppiamento, con un riduttore a ruote dentate cilindriche a denti diritti, tra un motore asincrono trifase e un albero, rappresentato nello schema, che a sua volta trasmette
Cuscinetti a strisciamento e a rotolamento
 Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
Cuscinetti a strisciamento e a rotolamento La funzione dei cuscinetti a strisciamento e a rotolamento è quella di interporsi tra organi di macchina in rotazione reciproca. Questi elementi possono essere
FEDELTÀ DELLA RISPOSTA DEI SISTEMI DI CONTROLLO IN RETROAZIONE: ANALISI DELLA PRECISIONE IN REGIME PERMANENTE
 FEDELTÀ DELLA RISPOSTA DEI SISTEMI DI CONTROLLO IN RETROAZIONE: ANALISI DELLA PRECISIONE IN REGIME PERMANENTE Nello studio dei sistemi di controllo in retroazione spesso si richiede che l uscita segua
FEDELTÀ DELLA RISPOSTA DEI SISTEMI DI CONTROLLO IN RETROAZIONE: ANALISI DELLA PRECISIONE IN REGIME PERMANENTE Nello studio dei sistemi di controllo in retroazione spesso si richiede che l uscita segua
Fig. 1: rotore e statore di una dinamo
 La dinamo La dinamo è una macchina elettrica rotante per la trasformazione di lavoro meccanico in energia elettrica, sotto forma di corrente continua. Costruttivamente è costituita da un sistema induttore
La dinamo La dinamo è una macchina elettrica rotante per la trasformazione di lavoro meccanico in energia elettrica, sotto forma di corrente continua. Costruttivamente è costituita da un sistema induttore
Raddrizzatore monofase a doppia semionda con filtro capacitivo
 Raddrizzatore monofase a doppia semionda con filtro capacitivo Nel caso di carichi lineari, a parità di potenza attiva erogata, la corrente (sinusoidale) assorbita dalla sorgente è minima quando la corrente
Raddrizzatore monofase a doppia semionda con filtro capacitivo Nel caso di carichi lineari, a parità di potenza attiva erogata, la corrente (sinusoidale) assorbita dalla sorgente è minima quando la corrente
Sistema dinamico a tempo continuo
 Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Integrale e derivata Integratore e derivatore - Un analisi grafica Matematica Elettronica
 Integrale e derivata Integratore e derivatore - Un analisi grafica Matematica Elettronica Percorso didattico sull integratore e il derivatore svolto in compresenza dai docenti di matematica Lucia Pinzauti
Integrale e derivata Integratore e derivatore - Un analisi grafica Matematica Elettronica Percorso didattico sull integratore e il derivatore svolto in compresenza dai docenti di matematica Lucia Pinzauti
USO DELL OSCILLOSCOPIO PER LA MISURA DELLA VELOCITA' DEL SUONO NELL ARIA
 USO DELL OSCILLOSCOPIO PER LA MISURA DELLA VELOCITA' DEL SUONO NELL ARIA B. Cottalasso R. Ferrando AIF PLS Corso Estivo di Fisica Genova 2009 1 Scopo dell esperimento Ci si propone di misurare la velocità
USO DELL OSCILLOSCOPIO PER LA MISURA DELLA VELOCITA' DEL SUONO NELL ARIA B. Cottalasso R. Ferrando AIF PLS Corso Estivo di Fisica Genova 2009 1 Scopo dell esperimento Ci si propone di misurare la velocità
Corso di Strumentazione e Misure Elettroniche 18/07/03 Prova Scritta
 Corso di Strumentazione e Misure Elettroniche 18/07/03 Per una corretta elaborazione di un segnale, è necessario conoscerne lo spettro di frequenza, cioè almeno il modulo delle componenti sinusoidali in
Corso di Strumentazione e Misure Elettroniche 18/07/03 Per una corretta elaborazione di un segnale, è necessario conoscerne lo spettro di frequenza, cioè almeno il modulo delle componenti sinusoidali in
SISTEMI DIGITALI DI CONTROLLO
 Sistemi Digitali di Controllo A.A. 9- p. /33 SISEMI DIGIALI DI CONROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Sistemi Digitali di Controllo A.A. 9- p. /33 SISEMI DIGIALI DI CONROLLO Prof. Alessandro De Luca DIS, Università di Roma La Sapienza deluca@dis.uniroma.it Lucidi tratti dal libro C. Bonivento, C. Melchiorri,
Generatore di funzioni. Modalità operative Circuito di uscita Uso del generatore di funzioni
 Generatore di funzioni Modalità operative Circuito di uscita Uso del generatore di funzioni 1 Modalità operative Il Il generatore di di funzioni è un un dispositivo in in grado di di generare segnali di
Generatore di funzioni Modalità operative Circuito di uscita Uso del generatore di funzioni 1 Modalità operative Il Il generatore di di funzioni è un un dispositivo in in grado di di generare segnali di
Sommario CAPITOLO 1 CAPITOLO 2. iii. Le grandezze elettriche... 1. I componenti circuitali... 29
 Sommario CAPITOLO 1 Le grandezze elettriche............................... 1 1-1 Progetto proposto Regolatore di flusso............................ 2 1-2 I primordi delle scienze elettriche.................................
Sommario CAPITOLO 1 Le grandezze elettriche............................... 1 1-1 Progetto proposto Regolatore di flusso............................ 2 1-2 I primordi delle scienze elettriche.................................
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 51-56025 PONTEDERA (PI)
") ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: 5AE DISCIPLINA: Sistemi Automatici - pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE A.S. 2014/2015 - CLASSE: 5AE DISCIPLINA: 5AE
ANNO SCOLASTICO 2014/2015 PROGRAMMAZIONE COORDINATA TEMPORALMENTE CLASSE: 5AE DISCIPLINA: Sistemi Automatici - pag. 1 PROGRAMMAZIONE COORDINATA TEMPORALMENTE A.S. 2014/2015 - CLASSE: 5AE DISCIPLINA: 5AE
Controllori PID, metodi di taratura e problemi d implementazione
 Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 51-56025 PONTEDERA (PI) PROGRAMMAZIONE COORDINATA TEMPORALMENTE
 PROGRAMMAZIONE COORDINATA TEMPORALMENTE") PROGRAMMAZIONE COORDINATA TEMPORALMENTE 5AE Monte ore annuo 132 ore di cui 66 di laboratorio Libro di Testo Cerri, Ortolani, Venturi CORSO DI 3, Hoepli. SETTEMBRE I trasduttori: Le caratteristiche di un
PROGRAMMAZIONE COORDINATA TEMPORALMENTE 5AE Monte ore annuo 132 ore di cui 66 di laboratorio Libro di Testo Cerri, Ortolani, Venturi CORSO DI 3, Hoepli. SETTEMBRE I trasduttori: Le caratteristiche di un
Risposta temporale: esercizi
 ...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso
 PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso Prof. Bruno Picasso LEZIONI: Introduzione al corso. Introduzione ai sistemi dinamici. I sistemi dinamici come sistemi di equazioni differenziali; variabili
PROGRAMMA SVOLTO fino al 22-06-2015 Fine del corso Prof. Bruno Picasso LEZIONI: Introduzione al corso. Introduzione ai sistemi dinamici. I sistemi dinamici come sistemi di equazioni differenziali; variabili
sensore di forza K m D L Vrif Ka Vrif r x -Vp/2 Vp/2 3URYD GL HVDPH GL )RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ 0HFFDQLFD OXJOLR
RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ 0HFFDQLFD OXJOLR") 3URYD GL HVDPH GL )RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ HFFDQLFD OXJOLR F sensore di forza 1) Il sistema in figura è un servomeccanismo in grado di facilitare la movimentazione di
3URYD GL HVDPH GL )RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ HFFDQLFD OXJOLR F sensore di forza 1) Il sistema in figura è un servomeccanismo in grado di facilitare la movimentazione di
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
Lezione 9. Prestazioni dinamiche dei sistemi di controllo
 Lezione 9 Prestazioni dinamihe dei sistemi di ontrollo Caratterizzazione delle prestazioni dinamihe Le prestazioni dinamihe fanno riferimento al omportamento del sistema di ontrollo durante i transitori,
Lezione 9 Prestazioni dinamihe dei sistemi di ontrollo Caratterizzazione delle prestazioni dinamihe Le prestazioni dinamihe fanno riferimento al omportamento del sistema di ontrollo durante i transitori,
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia piero.malcovati@unipv.it Piero Malcovati
CORSO DI TECNICA ED ECONOMIA DEI TRASPORTI A.A. 2006-07 DIAGRAMMI DEL MOTO SEMPLIFICATI
 POLITECNICO DI BARI II FACOLTA DI INGEGNERIA CORSO DI TECNICA ED ECONOMIA DEI TRASPORTI A.A. 2006-07 DIAGRAMMI DEL MOTO SEMPLIFICATI Diagrammi del moto semplificati slide 1 di 21 DESCRIZIONE DEL MOTO DI
POLITECNICO DI BARI II FACOLTA DI INGEGNERIA CORSO DI TECNICA ED ECONOMIA DEI TRASPORTI A.A. 2006-07 DIAGRAMMI DEL MOTO SEMPLIFICATI Diagrammi del moto semplificati slide 1 di 21 DESCRIZIONE DEL MOTO DI
( ) = f ( x ) o. ( ) = f ( x ). Per convenzione, davanti al periodo, utilizzeremo sempre il segno +. Il periodo di una funzione. prof. D.
 = f ( x ) o. ( ) = f ( x ). Per convenzione, davanti al periodo, utilizzeremo sempre il segno +. Il periodo di una funzione. prof. D.") Il periodo di una funzione prof. D. Benetti Definizione 1: Sia f :D R una funzione, D R e sia T un numero reale positivo. Si dice che f è periodica di periodo T se, per ogni x D e per ogni k Z, si ha (
Il periodo di una funzione prof. D. Benetti Definizione 1: Sia f :D R una funzione, D R e sia T un numero reale positivo. Si dice che f è periodica di periodo T se, per ogni x D e per ogni k Z, si ha (