Robot e Agenti Hardware
|
|
|
- Giovanna Paoli
- 8 anni fa
- Visualizzazioni
Transcript
1 Robot e Agenti Hardware Sumowar: Studio e Sviluppo di Algoritmi per la Competizione tra Agenti Robotici Stefano Cacciaguerra (scacciag@cs.unibo.it)

2 Contenuti Introduzione Esempi Caratteristiche Come Programmarli

3 Introduzione I robot stanno entrando prepotentemente nella nostra società: Il braccio robotico ha rivoluzionato l industria promuovendo precisione millimetrica in lavori pesanti. I rover della NASA ci hanno permesso di esplorare Marte. Il robot domestico Roomba è in grado di lavare i pavimenti in modalità autonoma. Diventano un evento mediatico servito alle grandi folle le competizioni tra robot che mescolano la ricerca scientifica con lo sviluppo industriale in uno show di grande effetto: La DARPA Grand Challenge 2005

4 Robot Robot una macchina capace di risolvere i compiti, percependo stimoli ed interagendo col mondo esterno. Industria: Indispensabili per affrontare problemi gravosi, in condizioni ambientali difficili dove risulta necessaria una precisione millimetrica (es: verniciatura, saldatura e montaggio). Ricerca: Nella medicina si studiano nano-tecnologie chirurgiche e robot per operazioni a distanza. Nella fisica aerospaziale, i rover della NASA spediti su Marte studiano il pianeta. Uso domestico: Roomba della IRobot pulisce i pavimenti e Ambrogio della Zucchetti taglia l erba del giardino. Intrattenimento: giocattoli tecnologici, capaci di interagire direttamente con l uomo come Aibo ERS-7 e Sdr-4x II della SONY.

5 Robot

6 Competizioni tra Robot Oggigiorno, il progresso tecnologico e l abbattimento dei costi dei materiali e dei dispositivi elettronici, permette anche a semplici amatori di costruire dei robot personalizzati. Diventa interessante promuovere i progetti migliori misurando i robot attraverso opportune competizioni: la DARPA Grand Challenge 2005, la RoboCup, la RoboCup Rescue e la SumoWar.

7 DARPA Grand Challenge 2005 La DARPA Grand Challenge 2005 è una competizione robotica, che ha promosso il confronto tra mezzi mobili, capaci di seguire un percorso lungo più di 200 km in totale autonomia, guidati da un intelligenza artificiale, da dispositivi di localizzazione GPS e di visione artificiale. Su cinquanta team partecipanti, soltanto venti hanno passato le qualificazioni preliminari e solo cinque sono arrivate alla fine del percorso.

8 Immagine e film DARPA Grand Challenge 2005

9 RobCup La RoboCup è un progetto internazionale che promuove partite di calcio tra agenti robotici. Obbiettivo: la creazione (entro il 2050) di una squadra formata da undici agenti robotici umanoidi, capaci di battere la squadra vincitrice dell ultimo campionato mondiale di calcio (regole della FIFA). progettazione del singolo agente, collaborazione tra gli agenti (gioco di squadra), calcolo di una strategia cooperativa per vincere una partita. La difficoltà risiede nella completa dinamicità del problema: l agente stesso, i suoi compagni di squadra e gli avversari, mutano il loro stato in modo imprevedibile e non deterministico.
, calcolo di una strategia cooperativa per vincere una partita.")
10 RobCup

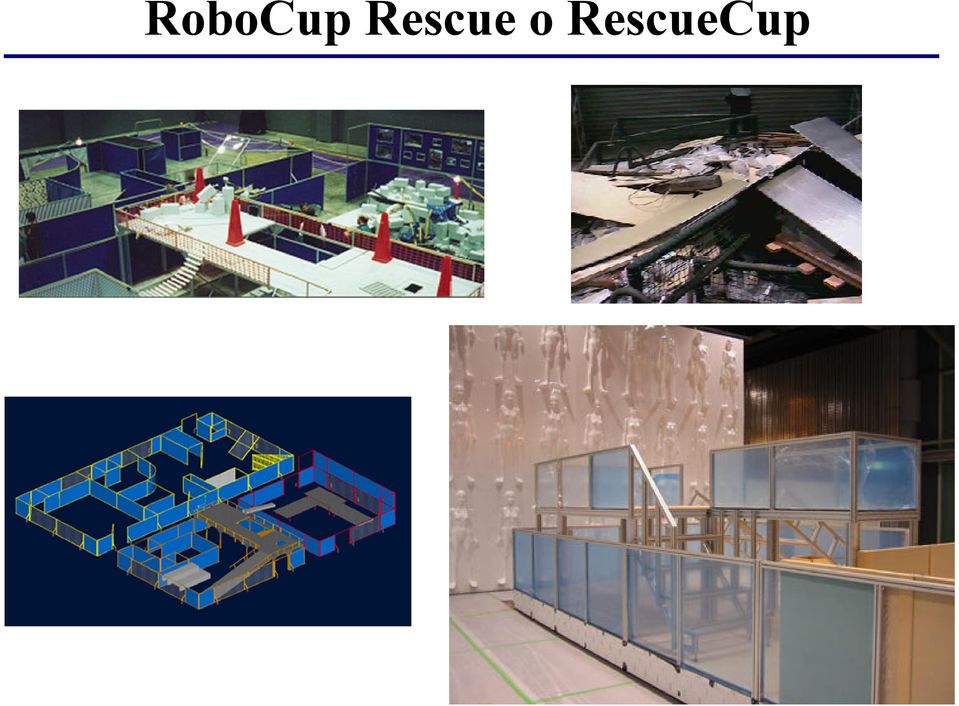
11 RoboCup Rescue o RescueCup La RoboCup Rescue è un progetto internazionale derivato dalla RoboCup Obbiettivo: promuovere lo sviluppo e la ricerca per il salvataggio di esseri umani in ambienti colpiti da catastrofi come terremoti, maremoti, tornado, attacchi nucleari ed incidenti aerei. Le squadre specializzate si avvalgono di macchine robotiche, in grado di raggiungere gli eventuali superstiti: in totale autonomia, di prestar loro il primo soccorso e condurli al più vicino centro di raccolta. Problemi da superare: la realizzazione di un sistema di visione artificiale, la ricerca di tecniche motorie per la massima mobilità e l implementazione di sistemi di interfacciamento ai parametri vitali dei superstiti per valutare la loro condizione.

12 RoboCup Rescue o RescueCup
13 SumoWar SumoWar identifica un torneo ad eliminazione diretta, basato sul regolamento internazionale delle gare di Sumo. Scontro diretto di due robot che sfruttando tutte le loro capacità cercano di buttare l avversario fuori dal ring. Scenario: un ring di forma circolare di colore nero, al cui interno sono posizionati i robot. Durata: Un match si protrae fino alla vittoria di uno dei partecipanti o allo scadere della durata massima pari a 3 minuti. Vittoria: sfida è ripetuta tre volte ed il robot che ha vinto più match sarà considerato qualificato per lo scontro successivo.

14 MiniSumo Esistono tre categorie diverse, in base al peso ed alle dimensioni: SumoWar, fino a 3 kg e 20x20 cm MiniSumo, fino a 500 g e10x10 cm MicroSumo, fino a 100 g e 5x5 cm Scenario per il MiniSumo: prevede un ring di 77cm di diametro, delimitato sul bordo da una linea bianca larga 2,5cm, in cui a 10cm dal centro sono poste due linee di partenza marroni di dimensione 1x10cm.

15 MiniSumo All inizio dell incontro i robot sono posti all interno dell arena, in una qualsiasi posizione nel semicerchio delimitato dalla propria linea di partenza e dal bordo. Al via, i robot vengono accesi e devono necessariamente rimanere immobili per 5 secondi, per permettere al team di allontanarsi dal ring. Ogni singolo match si conclude assegnando al robot vincitore uno Yuko: il robot butta fuori dal ring l'avversario con un azione legittima l'avversario esce fuori dal ring (per qualsiasi ragione) l'avversario viene squalificato.

16 MiniSumo Il robot non deve: utilizzare dispositivi che ostacolano le operazioni dell'avversario, danneggiano la superficie del ring, spruzzano liquidi, polveri o gas, arrecare alcun danno voluto al robot avversario, fissarsi alla superficie del ring.

17 MiniSumo

18 Progettazione Le grandi competizioni sottopongono gli agenti hardware ad obiettivi a lungo termine, variando le singole prove che compongono queste gare. Si cerca di costruire un agente autonomo ed intelligente capace di adattarsi all ambiente della competizione. Un robot trascorre la propria vita artificiale attraversando ciclicamente le tre seguenti fasi: sensazione: utilizza il sistema di acquisizione dati, provenienti dal mondo esterno, e crea una sua rappresentazione (sensazione) dell ambiente in cui vive; elaborazione: ottenuta una sensazione determina il comportamento da adottare, inviando le opportune informazioni (mossa o azione) agli attuatori; attuazione: concretizza la mossa attraverso gli attuatori trasformando informazioni in opportune grandezze fisiche.
 dell ambiente in cui vive; elaborazione: ottenuta una sensazione determina il comportamento da adottare, inviando le opportune informazioni (mossa o azione)")
19 Sumovore K SV,



20 Sensori I sensori possono captare frequenze sonore, luminose, radiofrequenze, e rilevare urti, forze, pressioni, spostamenti, posizioni relative e assolute.



21 Sistema di Elaborazione Il sistema di elaborazione è realizzato attraverso opportuni microprocessori, che si differenziano per velocità di calcolo, quantità e tipologia delle linee predisposte per lo I/O.
22 Attuatori Gli attuatori possono essere motori sincroni e asincroni, altoparlanti, foto emettitori a lunghezza d onda variabile, pistoni pneumatici o elettrici, relè, moduli a radiofrequenza, dispositivi di trasmissione dati seriale wireless.
23 Sumovore K SV è un Kit Sumovore K SV è un kit sviluppato per la competizione MiniSumo che sfrutta un comportamento istintivo realizzato attraverso mosse preconfigurate ottenuto dalle connessioni della rete logica che compone il suo cervello Al presentarsi di un preciso stimolo percepito nel mondo esterno reagisce in un solo ed unico modo. Non possiede un meccanismo capace di immagazzinare le sensazioni pervenute o tenere la cronologia delle mosse realizzate non è capace di capire quali nuove situazioni si verifichino e di intraprendere scelte diverse dovute all esperienza.
24 Sumovore K SV è un Kit Per aumentare la possibilità di vittoria abbiamo dotato la configurazione hardware del robot di un nuovo cervello cibernetico programmabile. È possibile: sfruttare più precisamente i sensori, elaborare azioni non previste dal kit base, eseguire manovre più sofisticate, immagazzinare le precedenti esperienze, ed evolvere la capacità mentale per riconoscere nuove situazioni comportamento maggiormente adattivo nella competizione
25 SumoWar come Applicazione Industriale La SumoWar non ha un riscontro diretto sulla realtà. Parafrasando, diviene possibile associare il comportamento di un SumoBot a quello di un applicazione commerciale come il robot lava pavimenti. SumoBot esplora il proprio ambiente per scoprire i confini del ring cerca l avversario per caricarlo trovare la posizione ottimale per spingere l avversario fuori dal ring Roomba esplora la stanza per riuscire a coprire tutta la sua superficie evita gli ostacoli ottimizzare il tempo per coprire la stanza il più velocemente possibile
26 Implementazione Il kit di base prevede l assemblamento di tre sezioni: Sense Board: ha la funzione di raccogliere i dati percepiti dai sensori infrarosso posizionati davanti e sotto il robot. Main Board: si occupa di alimentare i circuiti elettronici e di pilotare il sistema motorio composto di due motori asincroni indipendenti. Brain Board: è definita come cervello cibernetico del robot, in quanto analizza i dati percepiti dai sensori e, di conseguenza, decide il movimento da impartire al sistema motorio.
27 Implementazione La brain board è stata sostituita da una scheda utilizza del microcontrollore PIC 16F877A della Microchip che racchiude nel singolo chip diverse periferiche hardware, memorie EEPROM e una CPU RISC a 20MHz. Il software è stato scritto in ANSI C e compilato in linguaggio macchina utilizzando il compilatore PICC-LITE della HiTech. L uso del PIC migliora la valutazione dei valori dei segnali dei sensori, il sistema motorio permettendo al robot di compiere tutte le manovre possibili e di modulare la potenza sprigionata.
28 Le 4 Strategie Le strategie implementano diverse modalità di esplorazione dello spazio circostante. Individuato l avversario, la strada più breve è percorsa in moto rettilineo. Lineare: si muove in modo rettilineo ed implementa la modulazione della potenza sprigionata minimizzando la perdita di aderenza. ZigZag: compie un movimento a zigzag aumentando la porzione di spazio noto incrementando la probabilità di individuare l avversario. Roteante: sfrutta un movimento rotatorio sul proprio asse, per trovare l avversario ed è dipendente dalla posizione iniziale sul ring. Circolare: compie un movimento circolare di raggio prefissato; permette la visione di una porzione di spazio maggiore sfruttando la forma del ring.
29 Sperimentazioni Sperimentazioni in due fasi (ogni singolo test è stato condotto 30 volte): I. Robot con cervello a logica hardware vs. cibernetico programmabile. Le 4 strategie vincono al 65%, 70%, 73% e 78%. Una migliore valutazione dei valori rilevati dai sensori e da una superiore capacità motoria (una migliore tenuta sul ring e alla migliore capacità di manovra). II. È stato effettuato un girone all italiana tra le 4 strategie realizzate. Le strategie Roteante e Circolare hanno probabilità di vittoria maggiori. Le strategie Roteante e Circolare controllano una più alta porzione dello spazio noto per un periodo più lungo sfruttando un cambiamento di direzione più repentino.
30 Risultati Strategia Hardware Rettilinea ZigZag Rotazione Circolare Hardware X 65 % 70 % 73 % 78 % Rettilinea 35 % X 45 % 55 % 64 % ZigZag 30 % 55 % X 55 % 56 % Rotazione 27 % 45 % 45 % X 48 % Circolare 22 % 36 % 44 % 52 % X
31 Riferimenti [1] R. C. Arkin, 1998, Behavior-Based Robotics, The MIT Press. [2] D. Cook, 2002, Robot Building for Beginners, Apress. [3] Defense Advanced Research Projects Agency, Darpa Challenge, Ottobre 2005, [4] H. R. Everett,1995, Sensors for Mobile Robots: Theory and Application, A K Peters Ltd. [5] D. W. Gage, 1993, Randomized Search Strategies with Imperfect Sensors, Proceedings of SPIE Mobile Robots VIII, Vol. 2058, pp [6] HiTech, compilatori C per sistemi embedded, Gennaio 2006, [7] J. L. Jones, D. Roth, 2004, Robot Programming, McGraw-Hill/TAB Electronics. [8] J. Liu, C. K. Pok, H. K. Keung, 1999, Learning coordinated maneuvers in complex environments: A sumo experiment, Proceedings of the IEEE Congress on Evolutionary Computation, pp [9] D. Livingstone, 2006, Turing s test and believable AI in games, ACM Computer in Entertainment, Vol. 4, No. 1. [10] MicroChip, microcontrollori PIC, Gennaio 2006, [11] P. Miles, 2002, Robot Sumo: The Official Guide, McGraw-Hill. [12] Nanotecnologie, Febbraio 2006, [13] NASA, Sezione robotica, Febbraio 2006, [14] M. Predko, 2002, Programming and Customizing PICmicro MCU Microcontrollers, McGraw-Hill. [15] RoboCup, progetto internazione RoboCup, Dicembre 2005, [16] RoboCup Rescue, progetto internazione RoboCup sezione Rescue, Dicembre 2005, [17] Robot per operazioni chirurgiche a distanza, Febbraio 2006, [18] Solarbotics, kit di montaggio robot ed accessori, Dicembre 2005, [19] SumoWar, organizzazione internazione SumoWar, Dicembre 2005,
Dispensa di Informatica I.1
 IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
IL COMPUTER: CONCETTI GENERALI Il Computer (o elaboratore) è un insieme di dispositivi di diversa natura in grado di acquisire dall'esterno dati e algoritmi e produrre in uscita i risultati dell'elaborazione.
TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L AUTOMAZIONE INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Progettazione del robot
 Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
Progettazione del robot MINDSTORMS EV3 Anche quest anno abbiamo deciso di usare unmattoncinolegomindstormsev3.sitratta di un evoluzione dellaversione precedentenxt2.0, migliorata sotto diversi aspetti.
introduzione I MICROCONTROLLORI
 introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
introduzione I MICROCONTROLLORI Definizione Un microcontrollore è un dispositivo elettronico programmabile Può svolgere autonomamente diverse funzioni in base al programma in esso implementato Non è la
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Dispositivo di conversione di energia elettrica per aerogeneratori composto da componenti commerciali.
 Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Sede legale: Viale Vittorio Veneto 60, 59100 Prato P.IVA /CF 02110810971 Sede operativa: Via del Mandorlo 30, 59100 Prato tel. (+39) 0574 550493 fax (+39) 0574 577854 Web: www.aria-srl.it Email: info@aria-srl.it
Progetto Diogene Sicurezza delle persone malate di Alzheimer mediante geolocalizzazione
 Progetto Diogene Sicurezza delle persone malate di Alzheimer mediante geolocalizzazione La Sperimentazione è stata finanziata da Lo Scenario Lo studio ILSA del CNR sulla demenza ci porta a considerare
Progetto Diogene Sicurezza delle persone malate di Alzheimer mediante geolocalizzazione La Sperimentazione è stata finanziata da Lo Scenario Lo studio ILSA del CNR sulla demenza ci porta a considerare
Come valutare le caratteristiche aerobiche di ogni singolo atleta sul campo
 Come valutare le caratteristiche aerobiche di ogni singolo atleta sul campo Prima di organizzare un programma di allenamento al fine di elevare il livello di prestazione, è necessario valutare le capacità
Come valutare le caratteristiche aerobiche di ogni singolo atleta sul campo Prima di organizzare un programma di allenamento al fine di elevare il livello di prestazione, è necessario valutare le capacità
Università degli Studi di Salerno
 Università degli Studi di Salerno Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea in Informatica Tesi di Laurea Algoritmi basati su formule di quadratura interpolatorie per GPU ABSTRACT
Università degli Studi di Salerno Facoltà di Scienze Matematiche Fisiche e Naturali Corso di Laurea in Informatica Tesi di Laurea Algoritmi basati su formule di quadratura interpolatorie per GPU ABSTRACT
Materiali e metodi per la. sport
 Materiali e metodi per la misura di forze impulsive nello sport Genova 22 gennaio 2011 A cura di ANDREA CAMBIASO 1 FORZA IMPULSIVA Da Wikipedia, l'enciclopedia libera. Una forza impulsiva è una forza che
Materiali e metodi per la misura di forze impulsive nello sport Genova 22 gennaio 2011 A cura di ANDREA CAMBIASO 1 FORZA IMPULSIVA Da Wikipedia, l'enciclopedia libera. Una forza impulsiva è una forza che
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale. 1/6 www.ni.com
 RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
RoboTESTER Wall-E, ATE a letto d aghi per Test In-Circuit e Funzionale "L utilizzo di hardware COTS (Commercial off-the-shelf) National Instruments e di LabVIEW ha permesso al cliente finale di ottenere
COME SVILUPPARE UN EFFICACE PIANO DI INTERNET MARKETING
 Febbraio Inserto di Missione Impresa dedicato allo sviluppo pratico di progetti finalizzati ad aumentare la competitività delle imprese. COME SVILUPPARE UN EFFICACE PIANO DI INTERNET MARKETING COS E UN
Febbraio Inserto di Missione Impresa dedicato allo sviluppo pratico di progetti finalizzati ad aumentare la competitività delle imprese. COME SVILUPPARE UN EFFICACE PIANO DI INTERNET MARKETING COS E UN
TECNICHE DI SIMULAZIONE
 TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
Soluzione dell esercizio del 2 Febbraio 2004
 Soluzione dell esercizio del 2 Febbraio 2004 1. Casi d uso I casi d uso sono riportati in Figura 1. Figura 1: Diagramma dei casi d uso. E evidenziato un sotto caso di uso. 2. Modello concettuale Osserviamo
Soluzione dell esercizio del 2 Febbraio 2004 1. Casi d uso I casi d uso sono riportati in Figura 1. Figura 1: Diagramma dei casi d uso. E evidenziato un sotto caso di uso. 2. Modello concettuale Osserviamo
Sommario. Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi.
 Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
Algoritmi 1 Sommario Definizione di informatica. Definizione di un calcolatore come esecutore. Gli algoritmi. 2 Informatica Nome Informatica=informazione+automatica. Definizione Scienza che si occupa dell
SCIENZE E TECNOLOGIA
 SCIENZE E TECNOLOGIA COMPETENZE Dimostra conoscenze scientifico-tecnologiche che gli consentono di analizzare dati e fatti della realtà e di verificare l'attendibilità delle analisi quantitative e statistiche
SCIENZE E TECNOLOGIA COMPETENZE Dimostra conoscenze scientifico-tecnologiche che gli consentono di analizzare dati e fatti della realtà e di verificare l'attendibilità delle analisi quantitative e statistiche
TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE
 ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
ISTRUZIONE E FORMAZIONE TECNICA SUPERIORE SETTORE INDUSTRIA E ARTIGIANATO TECNICO SUPERIORE PER L INFORMATICA INDUSTRIALE STANDARD MINIMI DELLE COMPETENZE TECNICO PROFESSIONALI DESCRIZIONE DELLA FIGURA
Gestione della memoria centrale
 Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
Gestione della memoria centrale Un programma per essere eseguito deve risiedere in memoria principale e lo stesso vale per i dati su cui esso opera In un sistema multitasking molti processi vengono eseguiti
MODULO 01. Come è fatto un computer
 MODULO 01 Come è fatto un computer MODULO 01 Unità didattica 01 Conosciamo il computer In questa lezione impareremo: a conoscere le parti che compongono un computer e come sono definite quali sono gli
MODULO 01 Come è fatto un computer MODULO 01 Unità didattica 01 Conosciamo il computer In questa lezione impareremo: a conoscere le parti che compongono un computer e come sono definite quali sono gli
Il software di base comprende l insieme dei programmi predisposti per un uso efficace ed efficiente del computer.
 I Sistemi Operativi Il Software di Base Il software di base comprende l insieme dei programmi predisposti per un uso efficace ed efficiente del computer. Il sistema operativo è il gestore di tutte le risorse
I Sistemi Operativi Il Software di Base Il software di base comprende l insieme dei programmi predisposti per un uso efficace ed efficiente del computer. Il sistema operativo è il gestore di tutte le risorse
PROGRAMMAZIONE ANNUALE per la classe prima. Matematica
 ISTITUTO COMPRENSIVO DI SORISOLE Scuole Primarie PROGRAMMAZIONE ANNUALE per la classe prima Matematica Anno Scolastico 2015/ 2016 COMPETENZE : A -NUMERO Comprende il significato dei numeri, i modi per
ISTITUTO COMPRENSIVO DI SORISOLE Scuole Primarie PROGRAMMAZIONE ANNUALE per la classe prima Matematica Anno Scolastico 2015/ 2016 COMPETENZE : A -NUMERO Comprende il significato dei numeri, i modi per
Le diverse forme geometriche stimolano un comportamento tecnico regolato da forma e dimensione delle figure.
 GUIDA GEOMETRICA Le diverse forme geometriche stimolano un comportamento tecnico regolato da forma e dimensione delle figure. I bambini conducono la palla attorno a diverse figure geometriche. vince chi
GUIDA GEOMETRICA Le diverse forme geometriche stimolano un comportamento tecnico regolato da forma e dimensione delle figure. I bambini conducono la palla attorno a diverse figure geometriche. vince chi
Fondamenti di Informatica. Allievi Automatici A.A. 2014-15 Nozioni di Base
 Fondamenti di Informatica Allievi Automatici A.A. 2014-15 Nozioni di Base Perché studiare informatica? Perché l informatica è uno dei maggiori settori industriali, e ha importanza strategica Perché, oltre
Fondamenti di Informatica Allievi Automatici A.A. 2014-15 Nozioni di Base Perché studiare informatica? Perché l informatica è uno dei maggiori settori industriali, e ha importanza strategica Perché, oltre
CURRICOLO VERTICALE DI TECNOLOGIA NELLA SCUOLA PRIMARIA- CLASSE PRIMA
 CURRICOLO VERTICALE DI TECNOLOGIA NELLA SCUOLA PRIMARIA- CLASSE PRIMA 1a.Distinguere, descrivere con le parole e rappresentare con disegni e schemi elementi del mondo artificiale, cogliendone le differenze
CURRICOLO VERTICALE DI TECNOLOGIA NELLA SCUOLA PRIMARIA- CLASSE PRIMA 1a.Distinguere, descrivere con le parole e rappresentare con disegni e schemi elementi del mondo artificiale, cogliendone le differenze
Elettronica dei Sistemi Programmabili
 Elettronica dei Sistemi Programmabili Introduzione Stefano Salvatori Università degli Studi Roma Tre (stefano.salvatori@uniroma3.it) Università degli Studi Roma Tre Elettronica dei Sistemi Programmabili
Elettronica dei Sistemi Programmabili Introduzione Stefano Salvatori Università degli Studi Roma Tre (stefano.salvatori@uniroma3.it) Università degli Studi Roma Tre Elettronica dei Sistemi Programmabili
CORSI/EVENTI INCENTIVE
 Il Match Race, è una vera e propria guerra tra due imbarcazioni. La posta in palio: LA VITTORIA! Partendo da questo concetto abbiamo costruito un Evento in grado di rappresentare con lo sport le quotidiane
Il Match Race, è una vera e propria guerra tra due imbarcazioni. La posta in palio: LA VITTORIA! Partendo da questo concetto abbiamo costruito un Evento in grado di rappresentare con lo sport le quotidiane
DIPARTIMENTO DI STUDI UMANISTICI
 DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
IN COLLABORAZIONE CON OPTA SRL
 PROGRAMMARE LA PRODUZIONE IN MODO SEMPLICE ED EFFICACE IN COLLABORAZIONE CON OPTA SRL SOMMARIO 1. L AZIENDA E IL PRODOTTO 2. IL PROBLEMA 3. DATI DI INPUT 4. VERIFICA CARICO DI LAVORO SETTIMANALE 5. VERIFICA
PROGRAMMARE LA PRODUZIONE IN MODO SEMPLICE ED EFFICACE IN COLLABORAZIONE CON OPTA SRL SOMMARIO 1. L AZIENDA E IL PRODOTTO 2. IL PROBLEMA 3. DATI DI INPUT 4. VERIFICA CARICO DI LAVORO SETTIMANALE 5. VERIFICA
PREMESSA AUTOMAZIONE E FLESSIBILITA'
 PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
PREMESSA In questa lezione analizziamo i concetti generali dell automazione e confrontiamo le diverse tipologie di controllo utilizzabili nei sistemi automatici. Per ogni tipologia si cercherà di evidenziare
POLITECNICO DI TORINO
 NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
NEWSLETTER N2 - I dispositivi elettronici posti a protezione degli operatori E stato indicato nella precedente newsletter che la sicurezza degli operatori in un contesto industriale è affidata a una catena
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA
 IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
IL CONTROLLO AUTOMATICO: TRASDUTTORI, ATTUATORI CONTROLLO DIGITALE, ON-OFF, DI POTENZA TRASDUTTORI In un sistema di controllo automatico i trasduttori hanno il compito di misurare la grandezza in uscita
More Riordino Automatico
 Roberta Monari More Riordino Automatico La soluzione di Di.Tech per il riordino automatico da punto vendita LA SODDISFAZIONE DEL CONSUMATORE La disponibilità di prodotto a scaffale è una delle variabili
Roberta Monari More Riordino Automatico La soluzione di Di.Tech per il riordino automatico da punto vendita LA SODDISFAZIONE DEL CONSUMATORE La disponibilità di prodotto a scaffale è una delle variabili
La pista del mio studio Riflettiamo sulla pista. Guida per l insegnante
 Riflettiamo sulla pista Guida per l insegnante Obiettivi educativi generali Compito di specificazione - possiede capacità progettuale - è in grado di organizzare il proprio tempo e di costruire piani per
Riflettiamo sulla pista Guida per l insegnante Obiettivi educativi generali Compito di specificazione - possiede capacità progettuale - è in grado di organizzare il proprio tempo e di costruire piani per
Scopo della lezione. Informatica. Informatica - def. 1. Informatica
 Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
L informatica INTRODUZIONE. L informatica. Tassonomia: criteri. È la disciplina scientifica che studia
 L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
L informatica È la disciplina scientifica che studia INTRODUZIONE I calcolatori, nati in risposta all esigenza di eseguire meccanicamente operazioni ripetitive Gli algoritmi, nati in risposta all esigenza
Informazione e dato. Gabriella Trucco
 Informazione e dato Gabriella Trucco Cos è l informatica? Informatica? Trattamento automatico delle informazioni INFORMATICA Informazione Informazione: Qualcosa che quando viene fornito dissipa un dubbio,
Informazione e dato Gabriella Trucco Cos è l informatica? Informatica? Trattamento automatico delle informazioni INFORMATICA Informazione Informazione: Qualcosa che quando viene fornito dissipa un dubbio,
Corso di DISPOSITIVI E SISTEMI PER LE COMUNICAZIONI IN FIBRA OTTICA
 Università Mediterranea di Reggio Calabria - Facoltà di Ingegneria Corso di DISPOSITIVI E SISTEMI PER LE COMUNICAZIONI IN FIBRA OTTICA Prof. Ing. Riccardo Carotenuto Anno Accademico 2007/2008-1- SOMMARIO
Università Mediterranea di Reggio Calabria - Facoltà di Ingegneria Corso di DISPOSITIVI E SISTEMI PER LE COMUNICAZIONI IN FIBRA OTTICA Prof. Ing. Riccardo Carotenuto Anno Accademico 2007/2008-1- SOMMARIO
Progetto di Eccellenza - OMAROBOT -
 Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
Progetto di Eccellenza - OMAROBOT - 1 - il robot, un completo sistema di controllo 2 - il linguaggio di programmazione 3 - i sensori e i segnali d ingresso 4 - la meccanica del robot 5 - la gestione del
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA
 TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
TECNICO DELLE INDUSTRIE ELETTRONICHE Misura n.3 A.s. 2012-13 PROGETTAZIONE DI UN CONTROLLO ON-OFF CON CRITERI E METODOLOGIA Ipsia E. Fermi Catania Laboratorio di Sistemi 2012-13 mis.lab. n.2 Pag. 0 Controllo
BDX 3D-EDITOR (autore: Marco Bedulli) Scopo del software. Caratteristiche fondamentali. Linguaggi utilizzati. Navigazione 3D
 Scopo del software. Caratteristiche fondamentali. Linguaggi utilizzati. Navigazione 3D") BDX 3D-EDITOR (autore: Marco Bedulli) Scopo del software BDX 3D Editor è un programma che permette di navigare ed editare texture in un qualsiasi modello 3D.E compatibile con i software in grado di esportare
BDX 3D-EDITOR (autore: Marco Bedulli) Scopo del software BDX 3D Editor è un programma che permette di navigare ed editare texture in un qualsiasi modello 3D.E compatibile con i software in grado di esportare
Software relazione. Software di base Software applicativo. Hardware. Bios. Sistema operativo. Programmi applicativi
 Software relazione Hardware Software di base Software applicativo Bios Sistema operativo Programmi applicativi Software di base Sistema operativo Bios Utility di sistema software Software applicativo Programmi
Software relazione Hardware Software di base Software applicativo Bios Sistema operativo Programmi applicativi Software di base Sistema operativo Bios Utility di sistema software Software applicativo Programmi
GESTIONE DELLA PRODUZIONE
 25/02/2011 Pag. 1 di 5 GESTIONE DELLA PRODUZIONE 1. SCOPO... 2 2. APPLICABILITÀ... 2 3. DOCUMENTI DI RIFERIMENTO... 2 3.1. Norme... 2 3.2. Moduli / Istruzioni... 2 4. RESPONSABILITÀ... 2 5. DEFINIZIONI...
25/02/2011 Pag. 1 di 5 GESTIONE DELLA PRODUZIONE 1. SCOPO... 2 2. APPLICABILITÀ... 2 3. DOCUMENTI DI RIFERIMENTO... 2 3.1. Norme... 2 3.2. Moduli / Istruzioni... 2 4. RESPONSABILITÀ... 2 5. DEFINIZIONI...
Modellistica e Controllo di Sistemi ad Eventi Discreti
 Modellistica e Controllo di Sistemi ad Eventi Discreti Cos è l Automazione Industriale? Automazione Industriale: insieme di discipline (modelli, metodi e strumenti) che permettono di analizzare e progettare
Modellistica e Controllo di Sistemi ad Eventi Discreti Cos è l Automazione Industriale? Automazione Industriale: insieme di discipline (modelli, metodi e strumenti) che permettono di analizzare e progettare
Gli attuatori. Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo
 Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Gli attuatori Breve rassegna di alcuni modelli o dispositivi di attuatori nel processo di controllo ATTUATORI Definizione: in una catena di controllo automatico l attuatore è il dispositivo che riceve
Robotica Industiale. attività di laboratorio. Robotica Industriale Prof Claudio Melchiorri - 2009
 Robotica Industriale Prof Claudio Melchiorri - 2009 Robotica Industiale attività di laboratorio Robotica Industriale Prof Claudio Melchiorri - 2009 Contatti Mail: riccardo.falconi@unibo.it Telefono: 051
Robotica Industriale Prof Claudio Melchiorri - 2009 Robotica Industiale attività di laboratorio Robotica Industriale Prof Claudio Melchiorri - 2009 Contatti Mail: riccardo.falconi@unibo.it Telefono: 051
KEYSTONE. OM8 - EPI 2 Modulo interfaccia AS-i Manuale di istruzione. www.pentair.com/valves. Indice 1 Modulo Opzionale OM8: Interfaccia AS-i 1
 KEYSTONE Indice 1 Modulo Opzionale OM8: Interfaccia AS-i 1 2 Installazione 1 3 Dettagli sulla comunicazione 1 5 Descrizione del modulo interfaccia AS-i OM8 2 5 Protocollo interfaccia AS-i 3 6 Interfaccia
KEYSTONE Indice 1 Modulo Opzionale OM8: Interfaccia AS-i 1 2 Installazione 1 3 Dettagli sulla comunicazione 1 5 Descrizione del modulo interfaccia AS-i OM8 2 5 Protocollo interfaccia AS-i 3 6 Interfaccia
COORDINAMENTO PER MATERIE SETTEMBRE 2014 MATERIA DI NUOVA INTRODUZIONE PER EFFETTO DELLA RIFORMA
 Pagina 1 di 6 COORDINAMENTO PER MATERIE SETTEMBRE 2014 MATERIA DI NUOVA INTRODUZIONE PER EFFETTO DELLA RIFORMA AREA DISCIPLINARE Triennio, Indirizzo Informatica e Telecomunicazioni, art. TELECOM. MATERIA:
Pagina 1 di 6 COORDINAMENTO PER MATERIE SETTEMBRE 2014 MATERIA DI NUOVA INTRODUZIONE PER EFFETTO DELLA RIFORMA AREA DISCIPLINARE Triennio, Indirizzo Informatica e Telecomunicazioni, art. TELECOM. MATERIA:
In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi
 Capitolo 2 Controllo Cooperativo In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi intelligenti per gli Unmanned Aerial Vehicles (UAVs), cioè velivoli senza equipaggio
Capitolo 2 Controllo Cooperativo In questi ultimi anni ha ricoperto un grande interesse lo studio di controllori autonomi intelligenti per gli Unmanned Aerial Vehicles (UAVs), cioè velivoli senza equipaggio
9. Urti e conservazione della quantità di moto.
 9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
9. Urti e conservazione della quantità di moto. 1 Conservazione dell impulso m1 v1 v2 m2 Prima Consideriamo due punti materiali di massa m 1 e m 2 che si muovono in una dimensione. Supponiamo che i due
AURORA LUCA MARTINA GIANLUCA
 ALESSIO Team Firestorm MICHELE AURORA LUCA MARTINA GIANLUCA Quest anno il nome del robot è Rhynobot a causa del prolungamento frontale che ricorda il corno di un rinoceronte. Capitolo 1: Missioni scelte
ALESSIO Team Firestorm MICHELE AURORA LUCA MARTINA GIANLUCA Quest anno il nome del robot è Rhynobot a causa del prolungamento frontale che ricorda il corno di un rinoceronte. Capitolo 1: Missioni scelte
In quanti modi posso lanciare ed afferrare la palla? Chi riesce a?
 CARATTERISTICHE GENERALI DEI GIOCHI INDIVIDUALI CON UN ATTREZZO Gioco con l attrezzo Manipolazioni, da solo: lanciare, afferrare, Per riuscire a gestire far rotolare, l attrezzo. calciare. Per riuscire
CARATTERISTICHE GENERALI DEI GIOCHI INDIVIDUALI CON UN ATTREZZO Gioco con l attrezzo Manipolazioni, da solo: lanciare, afferrare, Per riuscire a gestire far rotolare, l attrezzo. calciare. Per riuscire
Scheduling della CPU. Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux
 Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
All interno del computer si possono individuare 5 componenti principali: SCHEDA MADRE. MICROPROCESSORE che contiene la CPU MEMORIA RAM MEMORIA ROM
 Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Il computer è un apparecchio elettronico che riceve dati di ingresso (input), li memorizza e gli elabora e fornisce in uscita i risultati (output). Il computer è quindi un sistema per elaborare informazioni
Alla ricerca dell algoritmo. Scoprire e formalizzare algoritmi.
 PROGETTO SeT Il ciclo dell informazione Alla ricerca dell algoritmo. Scoprire e formalizzare algoritmi. Scuola media Istituto comprensivo di Fagagna (Udine) Insegnanti referenti: Guerra Annalja, Gianquinto
PROGETTO SeT Il ciclo dell informazione Alla ricerca dell algoritmo. Scoprire e formalizzare algoritmi. Scuola media Istituto comprensivo di Fagagna (Udine) Insegnanti referenti: Guerra Annalja, Gianquinto
SCUOLA PRIMARIA OBIETTIVI DI APPRENDIMENTO
 SCUOLA PRIMARIA TECNOLOGIA classe 1^ COMPETENZE CHIAVE Competenza in campo scientifico-tecnologico Competenza digitale Imparare a imparare TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE L alunno: riconosce
SCUOLA PRIMARIA TECNOLOGIA classe 1^ COMPETENZE CHIAVE Competenza in campo scientifico-tecnologico Competenza digitale Imparare a imparare TRAGUARDI PER LO SVILUPPO DELLE COMPETENZE L alunno: riconosce
La gestione di un calcolatore. Sistemi Operativi primo modulo Introduzione. Sistema operativo (2) Sistema operativo (1)
 Sistema operativo (1)") La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
Durante la realizzazione di questo WP verranno anche effettuate delle sperimentazioni per verificare la bontà delle ipotesi in fase di studio.
 Allegato WP2 Il pacchetto software implementerà le seguenti funzioni specifiche del progetto allegato, così come delineato nella descrizione del WP 2 che vale come specifica generale: 1. programmazione
Allegato WP2 Il pacchetto software implementerà le seguenti funzioni specifiche del progetto allegato, così come delineato nella descrizione del WP 2 che vale come specifica generale: 1. programmazione
La gestione manageriale dei progetti
 PROGETTAZIONE Pianificazione, programmazione temporale, gestione delle risorse umane: l organizzazione generale del progetto Dimitri Grigoriadis La gestione manageriale dei progetti Per organizzare il
PROGETTAZIONE Pianificazione, programmazione temporale, gestione delle risorse umane: l organizzazione generale del progetto Dimitri Grigoriadis La gestione manageriale dei progetti Per organizzare il
Calcolatori Elettronici A a.a. 2008/2009
 Calcolatori Elettronici A a.a. 2008/2009 PRESTAZIONI DEL CALCOLATORE Massimiliano Giacomin Due dimensioni Tempo di risposta (o tempo di esecuzione): il tempo totale impiegato per eseguire un task (include
Calcolatori Elettronici A a.a. 2008/2009 PRESTAZIONI DEL CALCOLATORE Massimiliano Giacomin Due dimensioni Tempo di risposta (o tempo di esecuzione): il tempo totale impiegato per eseguire un task (include
Regolamento dei Robot "Cacciatori di Palline"
 11 novembre 2004 Regolamento dei Robot "Cacciatori di Palline" Note preliminari. Con la denominazione campo si intende sempre il campo di gara. Con la denominazione pallina si intende sempre la pallina
11 novembre 2004 Regolamento dei Robot "Cacciatori di Palline" Note preliminari. Con la denominazione campo si intende sempre il campo di gara. Con la denominazione pallina si intende sempre la pallina
Architetture Applicative
 Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
Alessandro Martinelli alessandro.martinelli@unipv.it 6 Marzo 2012 Architetture Architetture Applicative Introduzione Alcuni esempi di Architetture Applicative Architetture con più Applicazioni Architetture
ATTIVITA PROMOZIONALE 2014/2015
 ATTIVITA PROMOZIONALE 2014/2015 MANIFESTAZIONI PROVINCIALI E REGIONALI MINI-HANDBALL / GIOCHI PROPEDEUTICI / PALLAMANO / MINI BEACH CATEGORIA UNDER 6 Gioco base 4+1 Palla Re Mini Beach CATEGORIA UNDER
ATTIVITA PROMOZIONALE 2014/2015 MANIFESTAZIONI PROVINCIALI E REGIONALI MINI-HANDBALL / GIOCHI PROPEDEUTICI / PALLAMANO / MINI BEACH CATEGORIA UNDER 6 Gioco base 4+1 Palla Re Mini Beach CATEGORIA UNDER
Regime IVA Moss. Premessa normativa
 Nota Salvatempo Contabilità 13.0 15 GENNAIO 2014 Regime IVA Moss Premessa normativa La Direttiva 12 febbraio 2008, n. 2008/8/CE, art. 5 prevede che dal 1 gennaio 2015 i servizi elettronici, di telecomunicazione
Nota Salvatempo Contabilità 13.0 15 GENNAIO 2014 Regime IVA Moss Premessa normativa La Direttiva 12 febbraio 2008, n. 2008/8/CE, art. 5 prevede che dal 1 gennaio 2015 i servizi elettronici, di telecomunicazione
Il Sistema Operativo
 Il Sistema Operativo Il Sistema Operativo Il Sistema Operativo (S.O.) è un insieme di programmi interagenti che consente agli utenti e ai programmi applicativi di utilizzare al meglio le risorse del Sistema
Il Sistema Operativo Il Sistema Operativo Il Sistema Operativo (S.O.) è un insieme di programmi interagenti che consente agli utenti e ai programmi applicativi di utilizzare al meglio le risorse del Sistema
Fissate un appuntamento in questo negozio, personale altamente qualificato scioglierà i vostri dubbi e risolverà i vostri problemi in sella.
 CONCETTI Pedalare bene per ottenere prestazioni soddisfacenti senza accusare disturbi, nemmeno dopo percorsi lunghi a qualsiasi età. Un obiettivo non solo per coloro che sono impegnati in competizioni
CONCETTI Pedalare bene per ottenere prestazioni soddisfacenti senza accusare disturbi, nemmeno dopo percorsi lunghi a qualsiasi età. Un obiettivo non solo per coloro che sono impegnati in competizioni
Appunti sulla Macchina di Turing. Macchina di Turing
 Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Macchina di Turing Una macchina di Turing è costituita dai seguenti elementi (vedi fig. 1): a) una unità di memoria, detta memoria esterna, consistente in un nastro illimitato in entrambi i sensi e suddiviso
Soluzione degli esercizi sul moto rettilineo uniformemente accelerato
 Liceo Carducci Volterra - Classe 3 a B Scientifico - Francesco Daddi - 8 novembre 00 Soluzione degli esercizi sul moto rettilineo uniformemente accelerato Esercizio. Un corpo parte da fermo con accelerazione
Liceo Carducci Volterra - Classe 3 a B Scientifico - Francesco Daddi - 8 novembre 00 Soluzione degli esercizi sul moto rettilineo uniformemente accelerato Esercizio. Un corpo parte da fermo con accelerazione
Esercizi sul moto rettilineo uniformemente accelerato
 Liceo Carducci Volterra - Classe 3 a B Scientifico - Francesco Daddi - 8 novembre 010 Esercizi sul moto rettilineo uniformemente accelerato Esercizio 1. Un corpo parte da fermo con accelerazione pari a
Liceo Carducci Volterra - Classe 3 a B Scientifico - Francesco Daddi - 8 novembre 010 Esercizi sul moto rettilineo uniformemente accelerato Esercizio 1. Un corpo parte da fermo con accelerazione pari a
Piani di input e piani di calcolo reale in FaTA-e
 0 1 Piani di input e piani di calcolo reali in FaTA-e Dalla versione XX di FaTA-e è presente una nuova implementazione per il calcolo dei baricentri di massa e rigidezza. La nuova procedura consente di
0 1 Piani di input e piani di calcolo reali in FaTA-e Dalla versione XX di FaTA-e è presente una nuova implementazione per il calcolo dei baricentri di massa e rigidezza. La nuova procedura consente di
INTERFACCIA PER PC MEDIANTE PORTA SERIALE
 INTERFACCIA PER PC MEDIANTE PORTA SERIALE Scheda d interfaccia per PC da collegare alla porta seriale. Consente di controllare otto uscite a relè e di leggere otto ingressi digitali e due analogici. Un
INTERFACCIA PER PC MEDIANTE PORTA SERIALE Scheda d interfaccia per PC da collegare alla porta seriale. Consente di controllare otto uscite a relè e di leggere otto ingressi digitali e due analogici. Un
ALTERNANZA SCUOLA LAVORO CONNESSA ALLE ATTIVITA DI SOSTEGNO
 ALTERNANZA SCUOLA LAVORO CONNESSA ALLE ATTIVITA DI SOSTEGNO PREMESSA Con il presente progetto il nostro istituto vuole offrire agli allievi certificati L.104 del 1992 (sia per gli alunni che intraprendono
ALTERNANZA SCUOLA LAVORO CONNESSA ALLE ATTIVITA DI SOSTEGNO PREMESSA Con il presente progetto il nostro istituto vuole offrire agli allievi certificati L.104 del 1992 (sia per gli alunni che intraprendono
BCC Business Community Confindustria SVILUPPARE IL BUSINESS RISPARMIARE NEGLI ACQUISTI
 BCC Business Community Confindustria SVILUPPARE IL BUSINESS RISPARMIARE NEGLI ACQUISTI RELAZIONE DEL PRESIDENTE ALBERTO SCANU (12 giugno 2008) Ancora una volta Confindustria ci da l'opportunità di presentare
BCC Business Community Confindustria SVILUPPARE IL BUSINESS RISPARMIARE NEGLI ACQUISTI RELAZIONE DEL PRESIDENTE ALBERTO SCANU (12 giugno 2008) Ancora una volta Confindustria ci da l'opportunità di presentare
Torino, 8 Maggio2013
 Torino, 8 Maggio2013 O I nativi digitali O La media education O La ricerca bambini e tv O Progettare percorsi di media education O Prospettive di sviluppo Nella società odierna i media pervadono il tempo
Torino, 8 Maggio2013 O I nativi digitali O La media education O La ricerca bambini e tv O Progettare percorsi di media education O Prospettive di sviluppo Nella società odierna i media pervadono il tempo
SOLUZIONI PER IL CONTROLLO DELLA QUALITA DELL ARIA NEGLI AMBIENTI CHIUSI
 SOLUZIONI PER IL CONTROLLO DELLA QUALITA DELL ARIA NEGLI AMBIENTI CHIUSI SOLUZIONI PER IL CONTROLLO DELLA QUALITA DELL ARIA NEGLI AMBIENTI CHIUSI Fasar Elettronica presenta una nuova linea di prodotti
SOLUZIONI PER IL CONTROLLO DELLA QUALITA DELL ARIA NEGLI AMBIENTI CHIUSI SOLUZIONI PER IL CONTROLLO DELLA QUALITA DELL ARIA NEGLI AMBIENTI CHIUSI Fasar Elettronica presenta una nuova linea di prodotti
Sistema Operativo. Fondamenti di Informatica 1. Il Sistema Operativo
 Sistema Operativo Fondamenti di Informatica 1 Il Sistema Operativo Il Sistema Operativo (S.O.) è un insieme di programmi interagenti che consente agli utenti e ai programmi applicativi di utilizzare al
Sistema Operativo Fondamenti di Informatica 1 Il Sistema Operativo Il Sistema Operativo (S.O.) è un insieme di programmi interagenti che consente agli utenti e ai programmi applicativi di utilizzare al
automazione impianti produzione calcestruzzo per alimentazione vibropresse e tubiere
 Contatto: DUECI PROGETTI srl Emanuele Colombo +39 335 8339312 automazione impianti produzione calcestruzzo per alimentazione vibropresse e tubiere Realizzato con Unigest-DP PRESENTAZIONE Si tratta di un
Contatto: DUECI PROGETTI srl Emanuele Colombo +39 335 8339312 automazione impianti produzione calcestruzzo per alimentazione vibropresse e tubiere Realizzato con Unigest-DP PRESENTAZIONE Si tratta di un
Challenge Network Gamification
 Challenge Network Gamification Gamification - Premessa L introduzione di concetti come: punti, livelli e sfide all interno di un percorso formativo, incoraggia gli utenti ad investire il proprio tempo,
Challenge Network Gamification Gamification - Premessa L introduzione di concetti come: punti, livelli e sfide all interno di un percorso formativo, incoraggia gli utenti ad investire il proprio tempo,
DESIGN PATTERN ESERCITAZIONE PREPARAZIONE ALL ESAME, PARTE II INGEGNERIA DEL SOFTWARE. La soluzione corretta è la c)
") DESIGN PATTERN Barrare con una X la lettera del diagramma delle classi che fra i seguenti rappresenta in modo corretto il design pattern architetturale Model View Controller (MVC) ESERCITAZIONE PREPARAZIONE
DESIGN PATTERN Barrare con una X la lettera del diagramma delle classi che fra i seguenti rappresenta in modo corretto il design pattern architetturale Model View Controller (MVC) ESERCITAZIONE PREPARAZIONE
CAPITOLO 11 Innovazione cam i amen o
 CAPITOLO 11 Innovazione e cambiamento Agenda Ruolo strategico del cambiamento Cambiamento efficace Cambiamento tecnologico Cambiamento di prodotti e servizi i Cambiamento strategico e strutturale Cambiamento
CAPITOLO 11 Innovazione e cambiamento Agenda Ruolo strategico del cambiamento Cambiamento efficace Cambiamento tecnologico Cambiamento di prodotti e servizi i Cambiamento strategico e strutturale Cambiamento
GESFRA -GESES. Sistema per il monitoraggio remoto di Eventi Franosi ed Esondazioni GESFRA
 GESFRA -GESES Sistema per il monitoraggio remoto di Eventi Franosi ed Esondazioni 1 INDICE DOCUMENTO 1. Premesse progettuali del sistema GESFRA 2. Obiettivi già raggiunti del sistema GESFRA 3. 4. Funzionamento
GESFRA -GESES Sistema per il monitoraggio remoto di Eventi Franosi ed Esondazioni 1 INDICE DOCUMENTO 1. Premesse progettuali del sistema GESFRA 2. Obiettivi già raggiunti del sistema GESFRA 3. 4. Funzionamento
RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000
 RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 DESCRIZIONE GENERALE L espansore senza fili è un modulo
RIPETITORE DI SEGNALE WIRELESS PER SISTEMA VIA RADIO ART. 45RPT000 Leggere questo manuale prima dell uso e conservarlo per consultazioni future 1 DESCRIZIONE GENERALE L espansore senza fili è un modulo
ALGORITMI e PROGRAMMI Programmazione: Lavoro che si fa per costruire sequenze di istruzioni (operazioni) adatte a svolgere un dato calcolo
 adatte a svolgere un dato calcolo") ALGORITMI e PROGRAMMI Programmazione: Lavoro che si fa per costruire sequenze di istruzioni (operazioni) adatte a svolgere un dato calcolo INPUT: dati iniziali INPUT: x,y,z AZIONI esempio: Somma x ed y
ALGORITMI e PROGRAMMI Programmazione: Lavoro che si fa per costruire sequenze di istruzioni (operazioni) adatte a svolgere un dato calcolo INPUT: dati iniziali INPUT: x,y,z AZIONI esempio: Somma x ed y
Architettura hardware
 Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
Architettura dell elaboratore Architettura hardware la parte che si può prendere a calci Sistema composto da un numero elevato di componenti, in cui ogni componente svolge una sua funzione elaborazione
AGENTI FISICI TITOLO VIII - AGENTI FISICI CAPO I - DISPOSIZIONI GENERALI. 14.42.17 Ing. P. Pierannunzi - Medicina del lavoro 1/16
 TITOLO VIII - AGENTI FISICI CAPO I - DISPOSIZIONI GENERALI 14.42.17 Ing. P. Pierannunzi - Medicina del lavoro 1/16 Articolo 180 - Definizioni e campo di applicazione 1. Ai fini del presente decreto legislativo
TITOLO VIII - AGENTI FISICI CAPO I - DISPOSIZIONI GENERALI 14.42.17 Ing. P. Pierannunzi - Medicina del lavoro 1/16 Articolo 180 - Definizioni e campo di applicazione 1. Ai fini del presente decreto legislativo
Arduino UNO. Single board microcontroller
 Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
Arduino UNO Single board microcontroller Che cos è Arduino? Arduino è una piattaforma hardware basata su un microcontrollore, per lo sviluppo di applicazioni che possono interagire con il mondo esterno.
SVILUPPO DEL CORPO: l esercizio fisico stimola la respirazione e la circolazione, quindi le cellule sono nutrite meglio, e le loro scorie sono più
 La motricità nello sviluppo e nel comportamento del bambino Tutti gli autori sono d accordo nel riconoscere che l esercizio fisico ha un importanza fondamentale per lo sviluppo del corpo, della mente e
La motricità nello sviluppo e nel comportamento del bambino Tutti gli autori sono d accordo nel riconoscere che l esercizio fisico ha un importanza fondamentale per lo sviluppo del corpo, della mente e
LA PRIMA WEB APPLICATION PER REALIZZARE IL PIANO SPOSTAMENTI CASA-LAVORO
 LA PRIMA WEB APPLICATION PER REALIZZARE IL PIANO SPOSTAMENTI CASA-LAVORO 1 SW MOBILITY MANAGER MobilityManager permette di analizzare nel dettaglio le abitudini di mobilità dei dipendenti al fine di individuarne
LA PRIMA WEB APPLICATION PER REALIZZARE IL PIANO SPOSTAMENTI CASA-LAVORO 1 SW MOBILITY MANAGER MobilityManager permette di analizzare nel dettaglio le abitudini di mobilità dei dipendenti al fine di individuarne
leaders in engineering excellence
 leaders in engineering excellence engineering excellence Il mondo di oggi, in rapida trasformazione, impone alle imprese di dotarsi di impianti e macchinari più affidabili e sicuri, e di più lunga durata.
leaders in engineering excellence engineering excellence Il mondo di oggi, in rapida trasformazione, impone alle imprese di dotarsi di impianti e macchinari più affidabili e sicuri, e di più lunga durata.
LABORATORIO a cura di Pier Cesare Rivoltella e Andrea Garavaglia La Formazione a distanza di Terza Generazione
 LABORATORIO a cura di Pier Cesare Rivoltella e Andrea Garavaglia La Formazione a distanza di Terza Generazione Laboratorio 2 Apprendimento collaborativo in rete Laboratorio 2 Apprendimento collaborativo
LABORATORIO a cura di Pier Cesare Rivoltella e Andrea Garavaglia La Formazione a distanza di Terza Generazione Laboratorio 2 Apprendimento collaborativo in rete Laboratorio 2 Apprendimento collaborativo
PLC Programmable Logic Controller
 PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
PLC Programmable Logic Controller Sistema elettronico, a funzionamento digitale, destinato all uso in ambito industriale, che utilizza una memoria programmabile per l archiviazione di istruzioni orientate
GRAFICO DI FUNZIONI GONIOMETRICHE
 GRAFICO DI FUNZIONI GONIOMETRICHE y = A* sen x ( ω + ϕ ) Prerequisiti e Strumenti Obiettivi Tempi di lavoro Problema stimolo Descrizione consegne Verifica e valutazione Prerequisiti Prerequisiti disciplinari:
GRAFICO DI FUNZIONI GONIOMETRICHE y = A* sen x ( ω + ϕ ) Prerequisiti e Strumenti Obiettivi Tempi di lavoro Problema stimolo Descrizione consegne Verifica e valutazione Prerequisiti Prerequisiti disciplinari:
Mon Ami 3000 Produzione base Produzione articoli con distinta base e calcolo dei fabbisogni
 Prerequisiti Mon Ami 3000 Produzione base Produzione articoli con distinta base e calcolo dei fabbisogni L opzione Produzione base è disponibile per le versioni Azienda Light e Azienda Pro. Introduzione
Prerequisiti Mon Ami 3000 Produzione base Produzione articoli con distinta base e calcolo dei fabbisogni L opzione Produzione base è disponibile per le versioni Azienda Light e Azienda Pro. Introduzione
Scienze della Comunicazione Università di Salerno. UD 3.2a: Introduzione alla Programmazione
 UD 3.2a: Introduzione alla Programmazione Bibliografia Curtin, (vecchie edizioni) 12.1 Curtin (IV edizione): 11.1 Questi lucidi Il concetto di programma memorizzato Gli elettrodomestici di uso quotidiano
UD 3.2a: Introduzione alla Programmazione Bibliografia Curtin, (vecchie edizioni) 12.1 Curtin (IV edizione): 11.1 Questi lucidi Il concetto di programma memorizzato Gli elettrodomestici di uso quotidiano
Laboratorio di Algoritmi e Strutture Dati
 Laboratorio di Algoritmi e Strutture Dati Aniello Murano http://people.na.infn.it people.na.infn.it/~murano/ 1 Esercitazione di laboratorio: Problema del venditore Terza parte 2 1 Esercizio del venditore
Laboratorio di Algoritmi e Strutture Dati Aniello Murano http://people.na.infn.it people.na.infn.it/~murano/ 1 Esercitazione di laboratorio: Problema del venditore Terza parte 2 1 Esercizio del venditore
Procedure di lavoro in ambienti confinati Livello specialistico
 Procedure di lavoro in ambienti confinati Livello specialistico La formazione riferita a questo modulo formativo intende far acquisire le nozioni relative alla normativa e ai processi operativi che governano
Procedure di lavoro in ambienti confinati Livello specialistico La formazione riferita a questo modulo formativo intende far acquisire le nozioni relative alla normativa e ai processi operativi che governano
fit-up), cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il
, cioè ai problemi che si verificano all atto dell assemblaggio quando non si riescono a montare i diversi componenti del prodotto o quando il") Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
Abstract Nel presente lavoro di tesi è stata analizzata l importanza che riveste l assemblaggio meccanico nelle diverse fasi del processo produttivo, centrando l attenzione sulle fasi di progettazione
IL MANAGER COACH: MODA O REQUISITO DI EFFICACIA. Nelle organizzazioni la gestione e lo sviluppo dei collaboratori hanno una importanza fondamentale.
 IL MANAGER COACH: MODA O REQUISITO DI EFFICACIA Nelle organizzazioni la gestione e lo sviluppo dei collaboratori hanno una importanza fondamentale. Gestione e sviluppo richiedono oggi comportamenti diversi
IL MANAGER COACH: MODA O REQUISITO DI EFFICACIA Nelle organizzazioni la gestione e lo sviluppo dei collaboratori hanno una importanza fondamentale. Gestione e sviluppo richiedono oggi comportamenti diversi
Esame sezione Brevetti 2003-2004 Prova Pratica di meccanica
 Esame sezione Brevetti 2003-2004 Prova Pratica di meccanica OGGETVO: Brevettazione dl un perfezionamento riguardante I pressatori per mescolatori dl gomma Egregio dottore, Le invio una breve relazione
Esame sezione Brevetti 2003-2004 Prova Pratica di meccanica OGGETVO: Brevettazione dl un perfezionamento riguardante I pressatori per mescolatori dl gomma Egregio dottore, Le invio una breve relazione
Sistema di Sorveglianza e Ambient Intelligence per Residenze Sanitarie Assistenziali
 Sistema di Sorveglianza e Ambient Intelligence per Residenze Sanitarie Assistenziali Genova Robot s.r.l. www.genovarobot.com info@genovarobot.com Genova Robot s.r.l fornisce un sistema intelligente con
Sistema di Sorveglianza e Ambient Intelligence per Residenze Sanitarie Assistenziali Genova Robot s.r.l. www.genovarobot.com info@genovarobot.com Genova Robot s.r.l fornisce un sistema intelligente con