Architettura Software di un Sistema di Controllo per Multirotore
|
|
|
- Lucio Pizzi
- 7 anni fa
- Visualizzazioni
Transcript
1 Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici

2 Schema di Controllo Lo schema di controllo in assetto è rappresentato dalla seguente figura:

3 Schema di Controllo RCInterface, rappresenta l interfaccia hardware/software con il radio comando; l output di questo blocco è costituito dai valori di roll, pitch e yaw desiderati, nonchè dal valore della potenza di propulsione (thrust)

4 Schema di Controllo AttitudeEstimator, è l algoritmo di sensor fusion che, a partire dalle informazioni acquisite dalla IMU (Inertial Measurement Unit - giroscopi, accelerometri, magnetometri), stima l assetto effettivo del velivolo
, stima l assetto effettivo")
5 Schema di Controllo AttitudeControl, implementa i controllori di assetto (essenzialmente proporzionali), che si basano sulla differenza tra i valori desiderati e stimati degli angoli di Eulero; l output di ogni controllore è il rispettivo valore target della velocità angolare

6 Schema di Controllo RateControl, implementa i controllori di velocità (essenzialmente proporzionali-integrali), che si basano sulla differenza tra i valori desiderati ed effettivi delle velocità angolari; l output di ogni controllore è il rispettivo comando di rotazione per il blocco motori

7 Schema di Controllo Airframe Model, implementa la traduzione dei comandi di rotazione nei rispettivi comandi per i motori, basandosi sulla configurazione del velivolo (quadrotor- X, quadrotor- +, hexarotor, octarotor,...)

8 Stima dell assetto Stima dell assetto

9 Stima dell assetto La stima dell assetto è uno dei maggiori problemi dei sistemi di controllo dei multirotori. L obiettivo è ottenere i valori degli angoli di roll, pitch e yaw a partire dalle misure fornite da Giroscopi (velocità angolari) Accelerometri (accelerazioni lineari) Magnetometri (componenti campo magnetico terrestre) A tale scopo si utilizzano opportuni algoritmi di sensor fusion I più noti algoritmi sono i seguenti: DCM (Direction Cosine Matrix) Filtro complementare Filtro di Kalman
 Filtro")
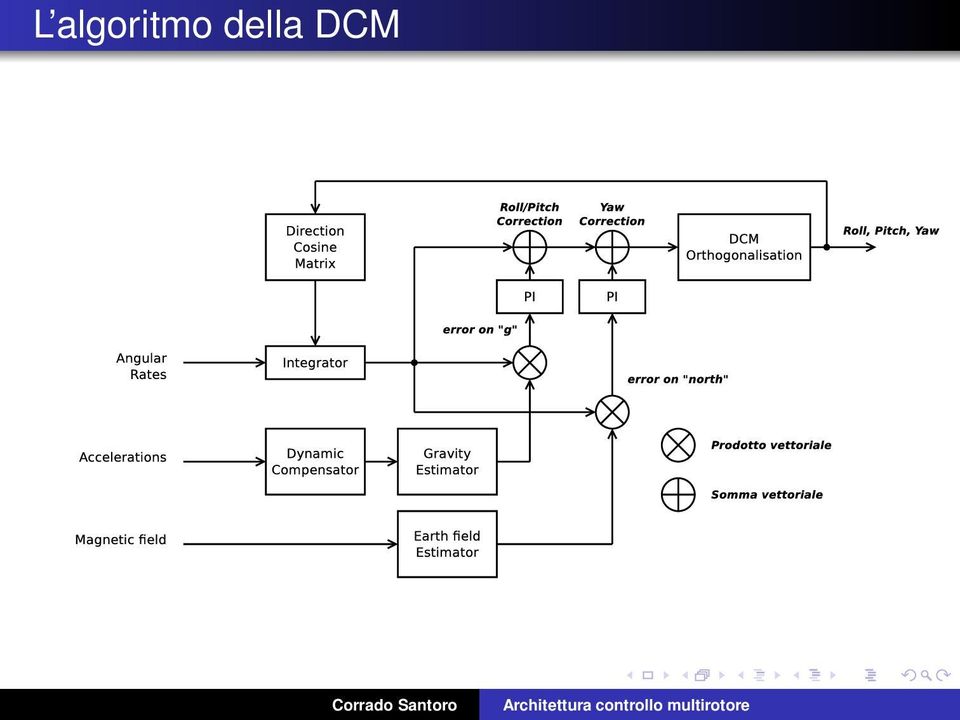
10 Direction Cosine Matrix La DCM è definita come la matrice di rotazione tra Earth reference e Body reference di un corpo rigido il cui assetto è specificato dagli angoli Eulero θ,φ,ψ Direction Cosine Matrix DCM = cθcψ sφsθcψ cφsψ cφsθcψ + sφsψ cθsψ sφsθsψ + cφcψ cφsθsψ sφcψ sθ sφcθ cφcθ s = sin, c = cos Un vettore v = (x, y, z ) in coordinate locali può essere tradotto in coordinate globali moltiplicandolo per la DCM: v = DCM v
 in coordinate locali può essere tradotto in coordinate globali moltiplicandolo per la DCM: v =")
11 Direction Cosine Matrix La DCM ha delle proprietà ben precise E ortogonale, la sua trasposta coincide con l inversa: DCM 1 DCM DCM T = DCM T = I L ortogonalità implica che le colonne (o le righe) sono vettori tra loro ortogonali il prodotto vettoriale è nullo sono vettori il cui modulo è unitario Tali proprietà vanno sempre mantenute

12 L algoritmo della DCM
13 Rappresentazione delle rotazioni in 3D La DCM è uno dei possibili modi per rappresentare le rotazioni in uno spazio 3D Un altro modo è basato sull uso dei quaternioni Quaternions Un quaternione è un numero complesso con una parte reale e tre parti immaginarie: q = q 0 + q 1 i+q 2 j+q 3 k i, j, k = imaginary units i 2 = j 2 = k 2 = ijk = 1 Se i numeri complessi permettono di rappresentare una rotazione in 3D, i quaternioni permettono di rappresentare le rotazioni in 3D

14 Rappresentazione delle rotazioni in 3D La rotazione di un vettore v con i quaternioni si ottiene dal prodotto qvq dove q è il coniugato di q e v = {0, v x, v y, v z}. Esistono opportune trasformazioni che permettono di passare dal dominio degli angoli di Eulero al dominio dei quaternioni (e viceversa): q (φ,θ,ψ) (φ,θ,ψ) q Gestire le rotazioni, nonchè le operazioni di integrazione o derivazione, nell algebra dei quaternioni è molto più semplice rispetto alla DCM (che invece richiede continue operazioni trigonometriche) I quaternioni permettono di risolvere i casi in cui la DCM diventa singolare (e quindi non invertibile) Essi sono utilizzati in altri algoritmi di sensor fusion come il Kalman Filter
 I quaternioni permettono di risolvere i casi in cui la DCM diventa singolare (e quindi non invertibile) Essi sono utilizzati in altri algoritmi di sensor")
15 Il filtro di Kalman Il blocco Kalman Gain non è altro che un semplice controllore proporzionale il cui guadagno viene però ricalcolato ad ogni iterazione, sulla base di un algoritmo che (note le covarianze degli errori di misura) permette di minimizzare l errore finale di misura
 permette di minimizzare l errore finale di")
16 Il filtro di Kalman L algoritmo si basa su calcoli matriciali e inversioni di matrici, pertanto può risultare particolarmente pesante Il Filtro di Kalman è tuttavia il miglior algoritmo di sensor fusion a oggi conosciuto ed è applicato in svariati contesti

17 Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici

Cinematica e Controllo di un robot mobile
 Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Introduzione ai filtri digitali
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Sistemi, misura e predizione
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Sistemi, misura e predizione
Cinematica e Controllo di un robot mobile
 Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Sistemi di Controllo - Il controllore proporzionale
 Sistemi di Controllo Il Controllore Proporzionale ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Sistemi di Controllo Il Controllore Proporzionale ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica diretta e inversa di un manipolatore
 Cinematica diretta e inversa di un manipolatore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica diretta e inversa di un manipolatore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Braccio Robotico (Pendolo Reale)
") Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Analisi dei Sistemi di Controllo PID
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Controllo a ciclo chiuso
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Controllo a ciclo chiuso
Sistemi Dinamici. Corrado Santoro
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Definizione di Sistema Un
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Definizione di Sistema Un
Analisi di un sistema. con Matlab/Octave
 dinamico con Matlab/Octave ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici
dinamico con Matlab/Octave ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici
Tipi di polso robotico 2 gdl
 Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
ossia può anche essere localizzato univocamente sul piano complesso con la sua forma polare.
 ALGEBRA COMPLESSA Nel corso dei secoli gli insiemi dei numeri sono andati man mano allargandosi per rispondere all esigenza di dare soluzione a equazioni e problemi sempre nuovi I numeri complessi sono
ALGEBRA COMPLESSA Nel corso dei secoli gli insiemi dei numeri sono andati man mano allargandosi per rispondere all esigenza di dare soluzione a equazioni e problemi sempre nuovi I numeri complessi sono
Sistemi di Controllo
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Massa su piano Supponiamo
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Massa su piano Supponiamo
Architettura del Motion Control. Cinematica di un Robot mobile su due ruote indipendenti
 Architettura Software del Motion Control Cinematica di un Robot mobile su due ruote indipendenti ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università
Architettura Software del Motion Control Cinematica di un Robot mobile su due ruote indipendenti ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università
Controllo PI con saturazione
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Schema controllo PI di un
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Schema controllo PI di un
4. Sottospazi vettoriali Piani e rette in E 3 O
 Indice Prefazione i Capitolo 0. Preliminari 1 1. Insiemistica e logica 1 1.1. Insiemi 1 1.2. Insiemi numerici 2 1.3. Logica matematica elementare 5 1.4. Ancora sugli insiemi 7 1.5. Funzioni 10 1.6. Composizione
Indice Prefazione i Capitolo 0. Preliminari 1 1. Insiemistica e logica 1 1.1. Insiemi 1 1.2. Insiemi numerici 2 1.3. Logica matematica elementare 5 1.4. Ancora sugli insiemi 7 1.5. Funzioni 10 1.6. Composizione
Architettura software del Motion Control
 Architettura Software del Motion Control ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi
Architettura Software del Motion Control ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi
Controllo in posizione con profilo di velocità
 con profilo di velocità ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Controllore
con profilo di velocità ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Controllore
1. Mercoledì 1/10/2014, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2014/2015 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 16 dicembre 2014 1. Mercoledì 1/10/2014, 15 17. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2014/2015 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 16 dicembre 2014 1. Mercoledì 1/10/2014, 15 17. ore:
Facoltà di Scienze Statistiche, Algebra Lineare 1 A, G. Parmeggiani - Programma
 Facoltà di Scienze Statistiche, Algebra Lineare 1 A, G. Parmeggiani - Programma Il testo di riferimento è: Appunti di Algebra Lineare, Gregorio, Parmeggiani, Salce 06/12/04 Matrici. Esempi. Tipi particolari
Facoltà di Scienze Statistiche, Algebra Lineare 1 A, G. Parmeggiani - Programma Il testo di riferimento è: Appunti di Algebra Lineare, Gregorio, Parmeggiani, Salce 06/12/04 Matrici. Esempi. Tipi particolari
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica
 CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
1. Martedì 27/09/2016, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Chimica e Meccanica 6 CFU - A.A. 2016/2017 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2016 1. Martedì 27/09/2016,
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Chimica e Meccanica 6 CFU - A.A. 2016/2017 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2016 1. Martedì 27/09/2016,
Ricordiamo brevemente come possono essere rappresentate le rette nel piano: 1) mediante un'equazione cartesiana. = ( p 1
 mediante un'equazione cartesiana. = ( p 1") Introduzione Nella computer grafica, gli oggetti geometrici sono definiti a partire da un certo numero di elementi di base chiamati primitive grafiche Possono essere punti, rette e segmenti, curve, superfici
Introduzione Nella computer grafica, gli oggetti geometrici sono definiti a partire da un certo numero di elementi di base chiamati primitive grafiche Possono essere punti, rette e segmenti, curve, superfici
1. Mercoledì 27/09/2017, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Chimica e Meccanica 6 CFU - A.A. 2017/2018 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2017 1. Mercoledì 27/09/2017,
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Chimica e Meccanica 6 CFU - A.A. 2017/2018 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2017 1. Mercoledì 27/09/2017,
Segnali Canonici e. Risposta di un sistema
 Segnali Canonici e Risposta di un Sistema ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Segnali Canonici e Risposta di un Sistema ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
1. Lunedì 26/09/2016, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2016/2017 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 13 dicembre 2016 1. Lunedì 26/09/2016, 11 13. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2016/2017 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 13 dicembre 2016 1. Lunedì 26/09/2016, 11 13. ore:
Controllo PID con saturazione
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Schema controllo PID di un
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Schema controllo PID di un
Registro di Matematica Applicata /18 - Dott.ssa L. Fermo 2
 Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2017/2018 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2017 1. Lunedì 25/09/2017, 11 13. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2017/2018 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 15 dicembre 2017 1. Lunedì 25/09/2017, 11 13. ore:
Registro di Matematica Applicata /18 - Dott.ssa L. Fermo 2
 Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2018/2019 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 19 dicembre 2018 1. Mercoledì 26/09/2018, 15 17. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2018/2019 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 19 dicembre 2018 1. Mercoledì 26/09/2018, 15 17. ore:
Matematica II, aa
 Matematica II, aa 2011-2012 Il corso si e svolto su cinque temi principali: sistemi lineari, algebra delle matrici, determinati, spazio vettoriale R n, spazio euclideo R n ; per ogni tema descrivo gli
Matematica II, aa 2011-2012 Il corso si e svolto su cinque temi principali: sistemi lineari, algebra delle matrici, determinati, spazio vettoriale R n, spazio euclideo R n ; per ogni tema descrivo gli
1. Martedì 29/09/2015, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2015/2016 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 18 dicembre 2015 1. Martedì 29/09/2015, 12 14. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2015/2016 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 18 dicembre 2015 1. Martedì 29/09/2015, 12 14. ore:
ESERCIZI VI TARATURA DI SISTEMI INERZIALI
 Esercizi VI 1 ESERCIZI VI TARATURA DI SISTEMI INERZIALI Esercizio I.1. Introduzione Lo scopo della presente esercitazione è di implementare diverse tecniche di taratura per i sensori inerziali che equipaggiano
Esercizi VI 1 ESERCIZI VI TARATURA DI SISTEMI INERZIALI Esercizio I.1. Introduzione Lo scopo della presente esercitazione è di implementare diverse tecniche di taratura per i sensori inerziali che equipaggiano
1. Martedì 1/10/2013, ore: 2(2) Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità
 Introduzione al corso: problemi ben posti, condizionamento, stabilità, complessità") Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2013/2014 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 18 dicembre 2013 1. Martedì 1/10/2013, 12 14. ore:
Registro delle lezioni di MATEMATICA APPLICATA Corsi di Laurea in Biomedica 6 CFU - A.A. 2013/2014 docente: Dott.ssa Luisa Fermo ultimo aggiornamento: 18 dicembre 2013 1. Martedì 1/10/2013, 12 14. ore:
Compito d esame 14/11/2005
 COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
B = (e 1,..., e n ) di V, e una sequenza C = ( f 1,..., f n ) di vettori di. Lezione del 21 maggio.
 di V, e una sequenza C = ( f 1,..., f n ) di vettori di. Lezione del 21 maggio.") Lezione del maggio. Il riferimento principale di questa lezione e costituito da parti di: 3 Trasformazioni ortogonali, 4 Complemento ortogonale, 5 Matrici di Gram e proiezioni ortogonali, 6 Orientazione
Lezione del maggio. Il riferimento principale di questa lezione e costituito da parti di: 3 Trasformazioni ortogonali, 4 Complemento ortogonale, 5 Matrici di Gram e proiezioni ortogonali, 6 Orientazione
SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT
 SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccanica e del Veicolo SISTEMI DI CONTROLLO CINEMATICA E DINAMICA DEI ROBOT Ing. Cristian Secchi Tel. 0522 522235 e-mail: secchi.cristian@unimore.it
Elementi di Algebra Lineare
 Elementi di Algebra Lineare Corso di Calcolo Numerico, a.a. 2009/2010 Francesca Mazzia Dipartimento di Matematica Università di Bari 13 Marzo 2006 Francesca Mazzia (Univ. Bari) Elementi di Algebra Lineare
Elementi di Algebra Lineare Corso di Calcolo Numerico, a.a. 2009/2010 Francesca Mazzia Dipartimento di Matematica Università di Bari 13 Marzo 2006 Francesca Mazzia (Univ. Bari) Elementi di Algebra Lineare
Un quaternione è un numero complesso con quattro componenti anziché due. Si scrive così :
 Un quaternione è un numero complesso con quattro componenti anziché due. Si scrive così : Q = q r + q i i + q j j + q k k ove le quantità q sono numeri reali e i, j e k sono tre unità immaginarie. Quando
Un quaternione è un numero complesso con quattro componenti anziché due. Si scrive così : Q = q r + q i i + q j j + q k k ove le quantità q sono numeri reali e i, j e k sono tre unità immaginarie. Quando
PreCorso di Matematica - PCM Corso M-Z
 PreCorso di Matematica - PCM Corso M-Z DOCENTE: M. Auteri Outline Docente: Auteri PreCorso di Matematica 2016 2 Definizione di matrice Una matrice (di numeri reali) è una tabella di m x n numeri disposti
PreCorso di Matematica - PCM Corso M-Z DOCENTE: M. Auteri Outline Docente: Auteri PreCorso di Matematica 2016 2 Definizione di matrice Una matrice (di numeri reali) è una tabella di m x n numeri disposti
Cinematica. La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane
 Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Cinematica La cinematica riguarda lo studio delle 4 funzioni che legano le variabili giunto con le variabili cartesiane Cinematica diretta di posizione Cinematica inversa di posizione Cinematica diretta
Navigazione Path Planning e Obstacle Avoidance
 Navigazione ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Cinematica, Posizione,
Navigazione ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Cinematica, Posizione,
UNIVERSITÀ DEGLI STUDI DI FIRENZE. Registro dell'insegnamento
 UNIVERSITÀ DEGLI STUDI DI FIRENZE Registro dell'insegnamento Anno accademico 2012/2013 Prof. ETTORE MINGUZZI Settore inquadramento MAT/07 - FISICA MATEMATICA Facoltà INGEGNERIA Insegnamento MECCANICA RAZIONALE
UNIVERSITÀ DEGLI STUDI DI FIRENZE Registro dell'insegnamento Anno accademico 2012/2013 Prof. ETTORE MINGUZZI Settore inquadramento MAT/07 - FISICA MATEMATICA Facoltà INGEGNERIA Insegnamento MECCANICA RAZIONALE
Algebra matriciale. Un algebra è un sistema di segni in cui sono definite delle operazioni Algebra scalare Algebra dei vettori Algebra matriciale
 Algebra matriciale Algebra Un algebra è un sistema di segni in cui sono definite delle operazioni Algebra scalare Algebra dei vettori Algebra matriciale In algebra matriciale un numero è chiamato scalare
Algebra matriciale Algebra Un algebra è un sistema di segni in cui sono definite delle operazioni Algebra scalare Algebra dei vettori Algebra matriciale In algebra matriciale un numero è chiamato scalare
Computazione per l interazione naturale: Richiami di algebra lineare
 Computazione per l interazione naturale: Richiami di algebra lineare Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it
Computazione per l interazione naturale: Richiami di algebra lineare Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it
Lezione 7.1. Introduzione al filtro di Kalman. F. Previdi - Controlli Automatici - Lez. 7.1
 Lezione 7.1 Introduzione al filtro di Kalman 1 Schema della lezione 1. Filtraggio in senso stretto ed in senso lato 2. Introduzione alla teoria di Kalman Esempio 1 : controllo di portata in un dosatore
Lezione 7.1 Introduzione al filtro di Kalman 1 Schema della lezione 1. Filtraggio in senso stretto ed in senso lato 2. Introduzione alla teoria di Kalman Esempio 1 : controllo di portata in un dosatore
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Sistemi e Tecnologie della Comunicazione
 Sistemi e Tecnologie della Comunicazione Complementi 1: numeri complessi I numeri complessi La definizione dei numeri complessi nasce dalla esigenza di trovare una soluzione alla equazione: x 1 che non
Sistemi e Tecnologie della Comunicazione Complementi 1: numeri complessi I numeri complessi La definizione dei numeri complessi nasce dalla esigenza di trovare una soluzione alla equazione: x 1 che non
Fisica 1 per studenti di chimica - Anno accademico Anna Nobili
 Fisica 1 per studenti di chimica - Anno accademico 2014-2015 - Anna Nobili 25 Settembre 2014 -Considerazioni sul metodo scientifico di Galileo su cui si basa la fisica (esempi: legge di inerzia e universalità
Fisica 1 per studenti di chimica - Anno accademico 2014-2015 - Anna Nobili 25 Settembre 2014 -Considerazioni sul metodo scientifico di Galileo su cui si basa la fisica (esempi: legge di inerzia e universalità
a. tatone corso di matematica applicata AL EX 1 Esercizi 1. Applicare l eliminazione di Gauss per risolvere il sistema di equazioni Au = v con
 a. tatone corso di matematica applicata AL EX Esercizi. Applicare l eliminazione di Gauss per risolvere il sistema di equazioni Au = v con Calcolare anche la L. 0 5 20 3 20 v := 2 5 3 5 6 2. Calcolare
a. tatone corso di matematica applicata AL EX Esercizi. Applicare l eliminazione di Gauss per risolvere il sistema di equazioni Au = v con Calcolare anche la L. 0 5 20 3 20 v := 2 5 3 5 6 2. Calcolare
Codifica a blocchi mediante trasformate
 Codifica a blocchi mediante trasformate Consideriamo una tecnica di compressione che divide un immagine in piccoli blocchi non sovrapposti di uguale dimensione (per es. 8 8) ed elabora i blocchi indipendentemente
Codifica a blocchi mediante trasformate Consideriamo una tecnica di compressione che divide un immagine in piccoli blocchi non sovrapposti di uguale dimensione (per es. 8 8) ed elabora i blocchi indipendentemente
Prova Scritta di Robotica I 9 Febbraio 2009
 Esercizio Prova Scritta di Robotica I 9 Febbraio 9 Si consideri l estensione al secondo ordine in accelerazione dello schema di controllo cinematico di traiettoria cartesiana. A tale scopo, si assuma che
Esercizio Prova Scritta di Robotica I 9 Febbraio 9 Si consideri l estensione al secondo ordine in accelerazione dello schema di controllo cinematico di traiettoria cartesiana. A tale scopo, si assuma che
Metodi computazionali per i Minimi Quadrati
 Metodi computazionali per i Minimi Quadrati Come introdotto in precedenza si considera la matrice. A causa di mal condizionamenti ed errori di inversione, si possono avere casi in cui il e quindi S sarebbe
Metodi computazionali per i Minimi Quadrati Come introdotto in precedenza si considera la matrice. A causa di mal condizionamenti ed errori di inversione, si possono avere casi in cui il e quindi S sarebbe
Daniela Lera A.A
 Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2016-2017 Richiami Algebra Lineare Spazio normato Uno spazio lineare X si dice normato se esiste una funzione
Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2016-2017 Richiami Algebra Lineare Spazio normato Uno spazio lineare X si dice normato se esiste una funzione
Corso di Fisica I per Matematica
 Corso di Fisica I per Matematica DOCENTE: Marina COBAL: marina.cobal@cern.ch Tel. 339-2326287 TESTO di RIFERIMENTO: Mazzoldi, Nigro, Voci: Elementi d fisica,meccanica e Termodinamica Ed. EdiSES FONDAMENTI
Corso di Fisica I per Matematica DOCENTE: Marina COBAL: marina.cobal@cern.ch Tel. 339-2326287 TESTO di RIFERIMENTO: Mazzoldi, Nigro, Voci: Elementi d fisica,meccanica e Termodinamica Ed. EdiSES FONDAMENTI
UNITÀ DI GOVERNO. Architettura funzionale. Ambiente di programmazione. Architettura hardware
 UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
UNITÀ DI GOVERNO Architettura funzionale Ambiente di programmazione Architettura hardware ARCHITETTURA FUNZIONALE Unità di governo abilità di muovere oggetti fisici nell ambiente di lavoro, (capacità di
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Elementi di Algebra Lineare.
 CALCOLO NUMERICO Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari 3. Elementi di Algebra Lineare. 1 Sistemi lineari Sia A IR m n, x IR n di n Ax = b è un vettore di m componenti.
CALCOLO NUMERICO Francesca Mazzia Dipartimento Interuniversitario di Matematica Università di Bari 3. Elementi di Algebra Lineare. 1 Sistemi lineari Sia A IR m n, x IR n di n Ax = b è un vettore di m componenti.
Possiamo scrivere le tre precedenti espressioni in un'unica equazione matriciale:
 A1. Considerazioni sul cambio di un sistema di riferimento cartesiano ortogonale Sia xyz un sistema di riferimento cartesiano ortogonale di origine O e di riferimento cartesiano pure di origine O. un secondo
A1. Considerazioni sul cambio di un sistema di riferimento cartesiano ortogonale Sia xyz un sistema di riferimento cartesiano ortogonale di origine O e di riferimento cartesiano pure di origine O. un secondo
Algebra lineare. Laboratorio di programmazione e calcolo CdL in Chimica. Pierluigi Amodio
 Algebra lineare Laboratorio di programmazione e calcolo CdL in Chimica Pierluigi Amodio Dipartimento di Matematica Università di Bari pierluigi.amodio@uniba.it http://dm.uniba.it/ amodio A.A. 2016/17 P.
Algebra lineare Laboratorio di programmazione e calcolo CdL in Chimica Pierluigi Amodio Dipartimento di Matematica Università di Bari pierluigi.amodio@uniba.it http://dm.uniba.it/ amodio A.A. 2016/17 P.
Cinematica differenziale inversa Statica
 Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Corso di Robotica 1 Cinematica differenziale inversa Statica Prof. Alessandro De Luca Robotica 1 1 Inversione della cinematica differenziale trovare le velocità di giunto che realizzano una velocità generalizzata
Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I)
") Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I) Luigi De Giovanni Giacomo Zambelli 1 Problemi di programmazione lineare Un problema
Metodi e Modelli per l Ottimizzazione Combinatoria Ripasso sulla Programmazione Lineare e il metodo del Simplesso (parte I) Luigi De Giovanni Giacomo Zambelli 1 Problemi di programmazione lineare Un problema
Le date si riferiscono alla prova scritta, le date delle prove orali verranno comunicate durante le prove scritte.
 Corso di Geometria (M-Z) per il corso di laurea in Ingegneria Civile, Edile e Ambientale dell Università di Firenze a.a. 2014/2015 - Prof.ssa Antonella Nannicini Programma dettagliato del corso Algebra
Corso di Geometria (M-Z) per il corso di laurea in Ingegneria Civile, Edile e Ambientale dell Università di Firenze a.a. 2014/2015 - Prof.ssa Antonella Nannicini Programma dettagliato del corso Algebra
Il principale libro di testo è il seguente: 1. [N] W. Keith Nicholson: Algebra Lineare, McGraw-Hill, 2002
![Il principale libro di testo è il seguente: 1. [N] W. Keith Nicholson: Algebra Lineare, McGraw-Hill, 2002](/thumbs/102/152612354.jpg "Il principale libro di testo è il seguente: 1. [N] W. Keith Nicholson: Algebra Lineare, McGraw-Hill, 2002") Programma di massima del corso di Geometria Corso di Laurea Telecomunicazioni Corso di Laurea Informazione per l Aerospazio AA 2007-2008 Prof. S. Capparelli Il principale libro di testo è il seguente:
Programma di massima del corso di Geometria Corso di Laurea Telecomunicazioni Corso di Laurea Informazione per l Aerospazio AA 2007-2008 Prof. S. Capparelli Il principale libro di testo è il seguente:
Esercitazione di Analisi Matematica II
 Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
ISTITUTO TECNICO INDUSTRIALE G. FERRARIS
 ISTITUTO TECNICO INDUSTRIALE G. FERRARIS EMPOLI PIANO DI LAVORO PROF. BICCI ANDREA CONSIGLIO DI CLASSE 3 SEZ. B Informatica INDIRIZZO INFORMATICO ANNO SCOLASTICO 2015-2016 MATERIE MATEMATICA (tre ore settimanali)
ISTITUTO TECNICO INDUSTRIALE G. FERRARIS EMPOLI PIANO DI LAVORO PROF. BICCI ANDREA CONSIGLIO DI CLASSE 3 SEZ. B Informatica INDIRIZZO INFORMATICO ANNO SCOLASTICO 2015-2016 MATERIE MATEMATICA (tre ore settimanali)
La trasformazione di camera
 La trasformazione di camera 1 Introduzione Per rappresentare un oggetto tridimensionale nello spazio (scena) in un piano bidimensionale (spazio delle immagini, quale il monitor o un foglio) è necessario
La trasformazione di camera 1 Introduzione Per rappresentare un oggetto tridimensionale nello spazio (scena) in un piano bidimensionale (spazio delle immagini, quale il monitor o un foglio) è necessario
Richiami di algebra lineare
 2 Richiami di algebra lineare 2.1 Prodotto scalare, prodotto vettoriale e prodotto misto Sia V lo spazio vettoriale tridimensionale ordinario, che dotiamo di una base ortonormale (e 1, e 2, e 3 ), e i
2 Richiami di algebra lineare 2.1 Prodotto scalare, prodotto vettoriale e prodotto misto Sia V lo spazio vettoriale tridimensionale ordinario, che dotiamo di una base ortonormale (e 1, e 2, e 3 ), e i
università DEGLI STUDI DI NAPOLI FEDERICO II
 università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
università DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Dettate dal Prof. Bruno SICILIANO nell Anno Accademico 2006-2007 Visto: IL PRESIDE
Esercizi Di Geometria 1 (BAER) Canale 1 Da consegnare Lunedi 19 Ottobre
 Canale 1 Da consegnare Lunedi 19 Ottobre") Esercizi Di Geometria (BAER Canale Da consegnare Lunedi 9 Ottobre SETTIMANA 3 (2 8 Ottobre Moltiplicazione di matrici Gli esercizi sono presi dal libro Intorduction to Linear Algebra di Serge Lang Esercizio
Esercizi Di Geometria (BAER Canale Da consegnare Lunedi 9 Ottobre SETTIMANA 3 (2 8 Ottobre Moltiplicazione di matrici Gli esercizi sono presi dal libro Intorduction to Linear Algebra di Serge Lang Esercizio
Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta
 - a.a. 2013/14 A. Teta") Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta 1. (1/10 Lu.) Generalità sugli insiemi, operazioni di unione, intersezione e prodotto cartesiano. Insiemi numerici: naturali,
Diario delle lezioni di Calcolo e Biostatistica (O-Z) - a.a. 2013/14 A. Teta 1. (1/10 Lu.) Generalità sugli insiemi, operazioni di unione, intersezione e prodotto cartesiano. Insiemi numerici: naturali,
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 7 Gennaio 8 Esercizio Si consideri il robot planare a tre giunti rotatori nella configurazione mostrata in figura Le lunghezze dei bracci sono l 5, l, l 3 5 [m] Si determini
Prova Scritta di Robotica I 7 Gennaio 8 Esercizio Si consideri il robot planare a tre giunti rotatori nella configurazione mostrata in figura Le lunghezze dei bracci sono l 5, l, l 3 5 [m] Si determini
Robotica I. Test 11 Novembre 2009
 Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
UNIVERSITÀ DEGLI STUDI DI PISA Facoltà di Ingegneria
 UNIVERSITÀ DEGLI STUDI DI PISA Facoltà di Ingegneria Dipartimento di Ingegneria Aerospaziale Tesi di Laurea Sviluppo di un Attitude & Heading Reference System basato su filtri di Kalman per l integrazione
UNIVERSITÀ DEGLI STUDI DI PISA Facoltà di Ingegneria Dipartimento di Ingegneria Aerospaziale Tesi di Laurea Sviluppo di un Attitude & Heading Reference System basato su filtri di Kalman per l integrazione
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
INTRODUZIONE ALL IMPIEGO DI SENSORI INERZIALI E GPS NELLA GEOREFERENZIAZIONE DIRETTA DELLE IMMAGINI IN FOTOGRAMMETRIA AEREA E TERRESTRE
 DIPARTIMENTO DI INGEGNERIA CIVILE, DELL AMBIENTE, DEL TERRITORIO ED ARCHITETTURA Università degli Studi di Parma Settore Scientifico Disciplinare: ICAR/06 Topografia e Cartografia INTRODUZIONE ALL IMPIEGO
DIPARTIMENTO DI INGEGNERIA CIVILE, DELL AMBIENTE, DEL TERRITORIO ED ARCHITETTURA Università degli Studi di Parma Settore Scientifico Disciplinare: ICAR/06 Topografia e Cartografia INTRODUZIONE ALL IMPIEGO
Le risposte vanno giustificate con chiarezza. 1) Nello spazio vettoriale V delle matrici 2 2 a coefficienti reali, considera le matrici A 1 = , A 4 =
 Nello spazio vettoriale V delle matrici 2 2 a coefficienti reali, considera le matrici A 1 = , A 4 =") Università degli Studi di Roma Tor Vergata. Corso di Laurea in Matematica Esame di Geometria 1 con Elementi di Storia Prof. F. Tovena 30 gennaio 2015 Le risposte vanno giustificate con chiarezza. 1 Nello
Università degli Studi di Roma Tor Vergata. Corso di Laurea in Matematica Esame di Geometria 1 con Elementi di Storia Prof. F. Tovena 30 gennaio 2015 Le risposte vanno giustificate con chiarezza. 1 Nello
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
Modelli di Moto. Incertezza nel movimento Modello Probabilistico Filtro Bayesiano
 Modelli di Moto Incertezza nel movimento Modello Probabilistico Filtro Bayesiano Un modello possibile sono le reti bayesiane Azioni, Osservazioni, Transizioni Localizzazione: Tassonomia Locale vs Globale:
Modelli di Moto Incertezza nel movimento Modello Probabilistico Filtro Bayesiano Un modello possibile sono le reti bayesiane Azioni, Osservazioni, Transizioni Localizzazione: Tassonomia Locale vs Globale:
0. Introduzione al linguaggio matematico
 Prof. Lidia Angeleri Università di Verona, 2014/15 Algebra Lineare ed Elementi di Geometria (Programma aggiornato in data 26 novembre 2014) 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Prof. Lidia Angeleri Università di Verona, 2014/15 Algebra Lineare ed Elementi di Geometria (Programma aggiornato in data 26 novembre 2014) 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi
Intelligenza di un robot autonomo Comportamento, ragionamento, pianificazione
 Comportamento, ragionamento, pianificazione ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Comportamento, ragionamento, pianificazione ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
il determinante che si ottiene da A, sopprimendo la i - esima riga e la j - esima colonna. Si definisce complemento algebrico dell'elemento a ij
 Determinanti Sia data la matrice quadrata a... a n a a n =...... a... a n nn Chiamiamo determinante di il numero det o che ad essa viene associato. det = a a... a... a... a n n n... a nn Un generico elemento
Determinanti Sia data la matrice quadrata a... a n a a n =...... a... a n nn Chiamiamo determinante di il numero det o che ad essa viene associato. det = a a... a... a... a n n n... a nn Un generico elemento
3. Vettori, Spazi Vettoriali e Matrici
 3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
3. Vettori, Spazi Vettoriali e Matrici Vettori e Spazi Vettoriali Operazioni tra vettori Basi Trasformazioni ed Operatori Operazioni tra Matrici Autovalori ed autovettori Forme quadratiche, quadriche e
Fisica 1 per studenti di chimica - Anno accademico Primo Semestre - Anna Nobili
 Fisica 1 per studenti di chimica - Anno accademico 2014-2015 - Primo Semestre - Anna Nobili 25 Settembre 2014 -Considerazioni sul metodo scientifico di Galileo su cui si basa la fisica (esempi: legge di
Fisica 1 per studenti di chimica - Anno accademico 2014-2015 - Primo Semestre - Anna Nobili 25 Settembre 2014 -Considerazioni sul metodo scientifico di Galileo su cui si basa la fisica (esempi: legge di
Università degli Studi di Roma Tor Vergata
 Università degli Studi di Roma Tor Vergata CANDIDATO: RELATORE: CORRELATORE: Ing. Daniele Carnevale Ing. Francesco Martinelli ATTUAZIONE DI UN SENSORE AD INFRAROSSI PER LA MAPPATURA DI AMBIENTI E L INSEGUIMENTO
Università degli Studi di Roma Tor Vergata CANDIDATO: RELATORE: CORRELATORE: Ing. Daniele Carnevale Ing. Francesco Martinelli ATTUAZIONE DI UN SENSORE AD INFRAROSSI PER LA MAPPATURA DI AMBIENTI E L INSEGUIMENTO
0. Introduzione al linguaggio matematico
 Prof. Lidia Angeleri Università di Verona, 2012/13 Algebra Lineare ed Elementi di Geometria Programma svolto nel Modulo Algebra Lineare 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi 1.2
Prof. Lidia Angeleri Università di Verona, 2012/13 Algebra Lineare ed Elementi di Geometria Programma svolto nel Modulo Algebra Lineare 0. Introduzione al linguaggio matematico 1. Insiemi 1.1 Esempi 1.2
Problemi ai minimi quadrati
 Seminario di matematica applicata avanzata Problemi ai minimi quadrati Sanna Mirko Matricola: 44464 Ingegneria elettrica ed elettronica Indice Introduzione - Il problema dei minimi quadrati - I vari tipi
Seminario di matematica applicata avanzata Problemi ai minimi quadrati Sanna Mirko Matricola: 44464 Ingegneria elettrica ed elettronica Indice Introduzione - Il problema dei minimi quadrati - I vari tipi
Controllo di impedenza
 Corso di Robotica 2 Controllo di impedenza Prof. Alessandro De Luca A. De Luca Controllo di impedenza assegna un comportamento dinamico desiderato all interazione fra end-effector e ambiente le prestazioni
Corso di Robotica 2 Controllo di impedenza Prof. Alessandro De Luca A. De Luca Controllo di impedenza assegna un comportamento dinamico desiderato all interazione fra end-effector e ambiente le prestazioni
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE
 MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
La matematica del CAD. Vettori e Matrici
 La matematica del CAD Vettori e Matrici IUAV Disegno Digitale Camillo Trevisan I programmi CAD riducono tutti i problemi geometrici in problemi analitici: la proiezione di un punto su un piano viene, ad
La matematica del CAD Vettori e Matrici IUAV Disegno Digitale Camillo Trevisan I programmi CAD riducono tutti i problemi geometrici in problemi analitici: la proiezione di un punto su un piano viene, ad
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
UNIVERSITÀ DEGLI STUDI DI FIRENZE. Registro dell'insegnamento
 UNIVERSITÀ DEGLI STUDI DI FIRENZE Registro dell'insegnamento Anno accademico 2012/2013 Prof. ELISA PRATO Settore inquadramento MAT/03 - GEOMETRIA Facoltà ARCHITETTURA Insegnamento ISTITUZIONI MATEMATICHE
UNIVERSITÀ DEGLI STUDI DI FIRENZE Registro dell'insegnamento Anno accademico 2012/2013 Prof. ELISA PRATO Settore inquadramento MAT/03 - GEOMETRIA Facoltà ARCHITETTURA Insegnamento ISTITUZIONI MATEMATICHE
Trasformata wavelet. 1 Introduzione. 2 Filtri wavelet di Daubechies
 Trasformata wavelet Introduzione L pari della trasforamta di Fourier veloce (FFT), la trasformata wavelet discreta (DWT) è un operazione veloce e lineare che opera su un vettore di dati di lunghezza pari
Trasformata wavelet Introduzione L pari della trasforamta di Fourier veloce (FFT), la trasformata wavelet discreta (DWT) è un operazione veloce e lineare che opera su un vettore di dati di lunghezza pari
Algebra Lineare Autovalori
 Algebra Lineare Autovalori Stefano Berrone Sandra Pieraccini Dipartimento di Matematica Politecnico di Torino, Corso Duca degli Abruzzi 24, 10129, Torino, Italy e-mail: sberrone@calvino.polito.it sandra.pieraccini@polito.it
Algebra Lineare Autovalori Stefano Berrone Sandra Pieraccini Dipartimento di Matematica Politecnico di Torino, Corso Duca degli Abruzzi 24, 10129, Torino, Italy e-mail: sberrone@calvino.polito.it sandra.pieraccini@polito.it
Geometria e algebra lineare Prova intermedia 30/11/2014 Corso di laurea in Ing. Elett. Tel., Ing. Inf. Org. e Informatica
 A A 1) Sia r la retta di equazioni x y =, y z = 1, e sia s la retta passante per i punti (2,, 1) e (,, ). Siano inoltre π il piano perpendicolare a r passante per ( 1,, ) e P il punto di intersezione di
A A 1) Sia r la retta di equazioni x y =, y z = 1, e sia s la retta passante per i punti (2,, 1) e (,, ). Siano inoltre π il piano perpendicolare a r passante per ( 1,, ) e P il punto di intersezione di
Esercizi di Matematica di Base Scienze biologiche e Scienze e Tecnologie dell Ambiente
 Esercizi di Matematica di Base Scienze biologiche e Scienze e Tecnologie dell Ambiente Dati i vettori di R (i) Calcolare il prodotto scalare v w, (ii) Stabilire se v e w sono ortogonali, (ii) Stabilire
Esercizi di Matematica di Base Scienze biologiche e Scienze e Tecnologie dell Ambiente Dati i vettori di R (i) Calcolare il prodotto scalare v w, (ii) Stabilire se v e w sono ortogonali, (ii) Stabilire
Sistemi di Misura Inerziali
 Sistemi di Misura Inerziali Misurano accelerazioni, lineari e angolari. Possono integrare magnetometri per la misura dell inclinazione Nell esempio riportato sensori inerziali sono usati per caratterizzare
Sistemi di Misura Inerziali Misurano accelerazioni, lineari e angolari. Possono integrare magnetometri per la misura dell inclinazione Nell esempio riportato sensori inerziali sono usati per caratterizzare
Esame di Regolazione e Controllo
 Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Localizzazione fine. Accelerometro e giroscopio. Università di Napoli Federico II
 Localizzazione fine Accelerometro e giroscopio Sensori comuni Accelerometro: misura l accelerazione* Giroscopio: misura la velocità angolare Magnetometro: misura l intensità del campo magnetico terrestre,
Localizzazione fine Accelerometro e giroscopio Sensori comuni Accelerometro: misura l accelerazione* Giroscopio: misura la velocità angolare Magnetometro: misura l intensità del campo magnetico terrestre,
Esercitazione 1: Introduzione a MATLAB
 Laboratorio di Immagini Esercitazione 1: Introduzione a MATLAB Mauro Zucchelli 09/03/2016 MATLAB Cos è MATLAB? MATLAB Cos è MATLAB? MATLAB non è un linguaggio di programmazione MATLAB Cos è MATLAB? MATLAB
Laboratorio di Immagini Esercitazione 1: Introduzione a MATLAB Mauro Zucchelli 09/03/2016 MATLAB Cos è MATLAB? MATLAB Cos è MATLAB? MATLAB non è un linguaggio di programmazione MATLAB Cos è MATLAB? MATLAB
Il programma OCTAVE per l insegnamento dell algebra lineare nella Scuola Secondaria p. 1
 Il programma OCTAVE per l insegnamento dell algebra lineare nella Scuola Secondaria R. Vitolo Dipartimento di Matematica Università di Lecce SaLUG! - Salento Linux User Group Il programma OCTAVE per l
Il programma OCTAVE per l insegnamento dell algebra lineare nella Scuola Secondaria R. Vitolo Dipartimento di Matematica Università di Lecce SaLUG! - Salento Linux User Group Il programma OCTAVE per l