Modelli di Moto. Incertezza nel movimento Modello Probabilistico Filtro Bayesiano
|
|
|
- Arianna Ferri
- 5 anni fa
- Visualizzazioni
Transcript

1 Modelli di Moto Incertezza nel movimento Modello Probabilistico Filtro Bayesiano Un modello possibile sono le reti bayesiane Azioni, Osservazioni, Transizioni
2 Localizzazione: Tassonomia Locale vs Globale: Location Tracking (posa iniziale nota; Global localization (posa iniziale non nota; kidnapped robot (riposizionamento Statica vs Dinamica: oggetti statici o dinamici Passiva vs Attiva: movimenti del robot per aiutare la localizzazione Robot vs Multi-Robot: più robot possono cooperare per localizzarsi reciprocamente
3 Localizzazione Markoviana Variante del Filtro di Bayes Richiede una mappa m Modello di misura: P(zt t, m Modello di moto: P(t ut, t-1, m Vediamo come si istanziano il modello di moto e il modello di misura
4 Configurazione di un robot mobile (posa descritta da 6 parametri. Coordinate 3D più 3 angoli di Eulero: pitch, roll, and tilt. Assumendo superficie planare lo spazio di stato è 3-dimensionale (,y,θ. Sistema di Riferimento


5 These modules require +5V and GND to power them, and provide a 0 to 5V output. They provide +5V output when they "see" white, and a 0V output when they "see" black. These disks are manufactured out of high quality laminated color plastic to offer a very crisp black to white ition. This enables a wheel encoder sensor to easily see the Source: itions. 5
6 Modelli di Moto Due tipi di modelli di moto: Basato su odometria Basato su velocità (dead reckoning Odometry-based usati se il sistema è dotato di wheel encoders. Velocity-based usati senza wheel encoders. La nuova posa calcolata con velocità e il tempo passato.
7 Modello odometrico L odometria è sensore, non controllo In questo modello si assume odometria come controllo spostamento Modello usato in diversi sistemi di localizzazione e mapping
8 Modello Odometrico Robot va dalla posa alla posa, y,, y, rot Informazione Odometrica: u Totali rot1, rot,,y, rot 1, y, Marginali ( ( y y atan( y y, rot 1 rot rot1
9 Modello Odometrico Con la funzione arcotangente modificata: 9
10 Modello di Rumore Il movimento stimato è dato dal movimento reale più un disturbo. ˆ ˆ ˆ rot1 rot1 1 rot 1 rotazione traslazione rotazione rot rot 1 rot 3 4 rot 1 rot Parametri dipendenti dal robot definiscono l errore
11 Distribuzione di probabilità 11 Normale Triangolare 1 1 ( e if ( Distribuzioni di errore tipicamente impiegate
12 Distribuzioni di Probabilità Normale prob_normal(a,b: Triangolare prob_triangular(a,b: Measurement Update 1
13 Calcolo del Post Update P(t t-1 e ut a partire da t-1 e ut 1. Algorithm motion_model_odometry(,,u ( ( y y rot 1 atan( y y, rot rot1 ˆ ( ( y y ˆ rot 1 atan( y y, ˆ ˆ rot rot 1 p ˆ ˆ ˆ 1 prob( rot1 rot1, 1 rot1 p ˆ ˆ ˆ ˆ prob(, 3 4( rot1 p prob ( ˆ, ˆ ˆ 3 rot rot 1 rot 11. return p 1 p p 3 odometry values (u spostamento odometrico values of interest (, spostamento reale rot Differenza spostamento odometrico/reale

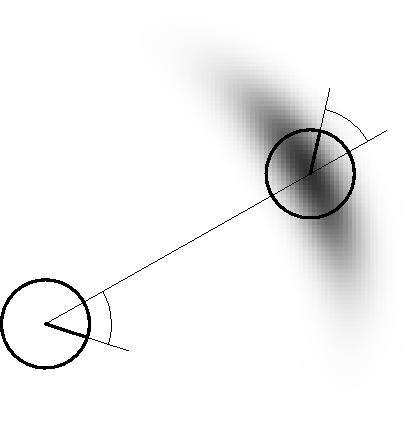
14 Applicazione Andamento tipico: Distribuzione sullo stato dopo l esecuzione delle azioni u a partire dallo stato p( u, u u
15 Campionamento dal modello Modello Odometrico 1. Algorithm sample_motion_model(u, : u ˆ rot ˆ ˆ,,,,, rot1 rot y sample( 1 rot1 1 rot1 sample( sample( ( 3 4 rot1 rot rot rot 1 rot y ˆ cos( ˆ y ˆ sin( ˆ rot1 rot1 ˆ ˆ rot 1 rot sample_normal_distribution 7. Return, y,
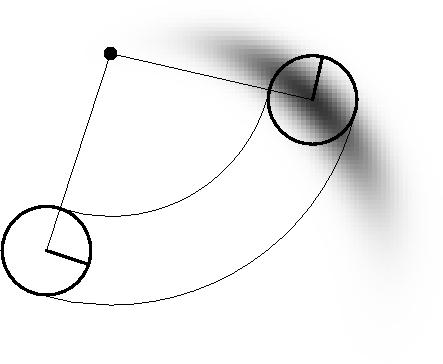
16 Campionamento dal Modello di Moto Esempio campionamento distribuzione dei campioni nel modello odometrico Start
17 Campionamento Da distribuzione normale 1. Algorithm sample_normal_distribution(b:. return Da distribuzione triangolare 1. Algorithm sample_triangular_distribution(b:. return



18 Esempi (Odometry-Based per diversi setting dei parametri Classico Errore Traslazione Errore Rotazione
19 Velocity-Based Model Sistema controllato in velocità (v,w Fisse nell intervallo (t-1,t] Mov. circolare con raggio 19
20 Dopo Δ t le nuove coordinate sono: Ma c e il rumore, quindi le coordinate reali sono: Quindi:
21 Ma errore solo per v e w (assunzione di moto circolare, introduzione di ulteriore rotazione: Occorre calcolare P(t ut e t-1
22 Modello Basato su velocità <,y > <(+ /,(y+y /> Retta passante per <(+ /, (y+y /> ed ortogonale alla retta che collega <,y> e <,y > Centro del circolo <*,y*> dove
23 Quindi centro del circolo raggio del circolo variazione angolare Rispetto a,y e,y
24 Modello Basato su velocità: Calcolo del Post, stanno per t, t-1
25 Campionamento dal Velocity Model sample genera i campioni da una dist. con la varianza specificata 5




26 Esempi distribuzioni (velocity based
27 Map-Consistent Motion Model, ( u p,, ( m u p, ( (,, ( u p m p m u p Approimation: Se si considera la mappa occorre integrare gli ostacoli. Approssimazione:
28 Però la relazione è la seguente: Approssimazione: Solo per brevi spostamenti si puo assumere:
29 Sommario Modelli di Moto Modelli basati su odometria e velocità Calcolo della posterior probability p(, u. Campionamento da p(, u. Calcolo da intervalli di tempo fissi t. Parameteri del modello devono essere appresi. Modello esteso che considera la mappa. 9
Robotica Mobile Percezione
 Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Robotica Mobile Percezione l d d bl b f b ( f lf d Materiale tratto tratto da: Introduction to Mobile Robotics, Univ. of Freiburg (Prof. Dr. Wolfram Burgard, Dr. Cyrill Stachniss, Dr. Giorgio Grisetti,
Lezione 14 Il problema della localizzazione 19 aprile
 Robotica Robot Industriali e di Servizio Lezione 14: Il problema della localizzazione Ma la domanda fondamentale è: Come si fa a sapere dove si deve andare? E ancora prima: Come si fa a sapere dove si
Robotica Robot Industriali e di Servizio Lezione 14: Il problema della localizzazione Ma la domanda fondamentale è: Come si fa a sapere dove si deve andare? E ancora prima: Come si fa a sapere dove si
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali
 Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT) Un robot mobile non può farlo, e deve: Misurare la propria
Robot Mobili su Ruote Generalità e Cinematica
 Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Lezione 3: Il problema della localizzazione
 Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Robotica Mobile Lezione 3: Il problema della localizzazione Concetti fondamentali Un robot industriale conosce la propria posizione (a meno di piccoli errori) leggendo gli encoder (ed applicando la DKT)
Robotica Probabilistica. Filtri Bayesiani
 Robotica Probabilistica Filtri Bayesiani Filtri discreti e Particle filters Filtri ad Istogrammi e Filtri Discreti - Decompongono lo spazio in regioni e rappresentano il post cumulativo di ogni regione
Robotica Probabilistica Filtri Bayesiani Filtri discreti e Particle filters Filtri ad Istogrammi e Filtri Discreti - Decompongono lo spazio in regioni e rappresentano il post cumulativo di ogni regione
Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman
 Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Incontro CIRA 21 Lecce, 12 14 Settembre 21 Stima di Posizione e Orientamento Mediante Elaborazione di Immagini con il Filtro di Kalman Fabrizio CACCAVALE Vincenzo LIPPIELLO Bruno SICILIANO Luigi VILLANI
Cinematica e Controllo di un robot mobile
 Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile
 Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Cinematica e Controllo di un robot mobile ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Lezione 19: Il problema della localizzazione
 Robotica Robot Industriali e di Servizio Lezione 19: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Robotica Robot Industriali e di Servizio Lezione 19: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Studio di tecniche per la rivelazione di traiettorie di veicoli in movimento in sequenze video
 Dipartimento di Elettronica e Telecomunicazioni Università di Firenze Laboratorio Comunicazioni & Immagini Studio di tecniche per la rivelazione di traiettorie di veicoli in movimento in sequenze video
Dipartimento di Elettronica e Telecomunicazioni Università di Firenze Laboratorio Comunicazioni & Immagini Studio di tecniche per la rivelazione di traiettorie di veicoli in movimento in sequenze video
Dinamica. INTELLIGENT AUTONOMOUS SYSTEMS LAB
 Dinamica toselloe@dei.unipd.it INTELLIGENT AUTONOMOUS SYSTEMS LAB Introduzione Obbiettivi: Multi-DOF robot DINAMICA Studio delle leggi fisiche necessarie per il moto dei corpi costituenti il robot Robovie-X
Dinamica toselloe@dei.unipd.it INTELLIGENT AUTONOMOUS SYSTEMS LAB Introduzione Obbiettivi: Multi-DOF robot DINAMICA Studio delle leggi fisiche necessarie per il moto dei corpi costituenti il robot Robovie-X
Architettura Software di un Sistema di Controllo per Multirotore
 Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it
Architettura Software di un Sistema di Controllo per Multirotore ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it
Computazione per l interazione naturale: Regressione probabilistica
 Computazione per l interazione naturale: Regressione probabilistica Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2016.html
Computazione per l interazione naturale: Regressione probabilistica Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2016.html
Indice. Prefazione. 3 Capitolo 1 Gli schemi generali del rilievo topografico e i sistemi di riferimento
 Indice IX Prefazione 3 Capitolo 1 Gli schemi generali del rilievo topografico e i sistemi di riferimento 3 1.1 Lo schema generale del rilevamento Topografico 5 1.1.1 Lo schema del rilevamento topografico
Indice IX Prefazione 3 Capitolo 1 Gli schemi generali del rilievo topografico e i sistemi di riferimento 3 1.1 Lo schema generale del rilevamento Topografico 5 1.1.1 Lo schema del rilevamento topografico
Computazione per l interazione naturale: Regressione probabilistica
 Computazione per l interazione naturale: Regressione probabilistica Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2017.html
Computazione per l interazione naturale: Regressione probabilistica Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2017.html
Lezione 22 Il problema della localizzazione 5 maggio
 Robotica Robot Industriali e di Servizio Lezione 22: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Robotica Robot Industriali e di Servizio Lezione 22: Il problema della localizzazione Sensori di campo magnetico (bussole) Il campo magnetico terrestre permette misure estremamente precise, ma: C è solo
Indice. centrale, dispersione e forma Introduzione alla Statistica Statistica descrittiva per variabili quantitative: tendenza
 XIII Presentazione del volume XV L Editore ringrazia 3 1. Introduzione alla Statistica 5 1.1 Definizione di Statistica 6 1.2 I Rami della Statistica Statistica Descrittiva, 6 Statistica Inferenziale, 6
XIII Presentazione del volume XV L Editore ringrazia 3 1. Introduzione alla Statistica 5 1.1 Definizione di Statistica 6 1.2 I Rami della Statistica Statistica Descrittiva, 6 Statistica Inferenziale, 6
Apprendimento Automatico
 Apprendimento Automatico Metodi Bayesiani Fabio Aiolli 11 Dicembre 2017 Fabio Aiolli Apprendimento Automatico 11 Dicembre 2017 1 / 19 Metodi Bayesiani I metodi Bayesiani forniscono tecniche computazionali
Apprendimento Automatico Metodi Bayesiani Fabio Aiolli 11 Dicembre 2017 Fabio Aiolli Apprendimento Automatico 11 Dicembre 2017 1 / 19 Metodi Bayesiani I metodi Bayesiani forniscono tecniche computazionali
Computazione per l interazione naturale: Regressione probabilistica
 Computazione per l interazione naturale: Regressione probabilistica Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2018.html
Computazione per l interazione naturale: Regressione probabilistica Corso di Interazione Naturale Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it boccignone.di.unimi.it/in_2018.html
Computazione per l interazione naturale: Regressione lineare Bayesiana
 Computazione per l interazione naturale: Bayesiana Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@di.unimi.it
Computazione per l interazione naturale: Bayesiana Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@di.unimi.it
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 0 Luglio 2009 Esercizio Si consideri il robot planare RP in figura, dove l è la lunghezza del primo braccio e sono indicate le coordinate generalizzate da utilizzare. Sia p
Prova Scritta di Robotica I 0 Luglio 2009 Esercizio Si consideri il robot planare RP in figura, dove l è la lunghezza del primo braccio e sono indicate le coordinate generalizzate da utilizzare. Sia p
La verità giace in un ambito molto ristretto, ma l errore è immenso... Henry St John, Reflextion on Exile
 La verità giace in un ambito molto ristretto, ma l errore è immenso... Henry St John, Reflextion on Exile APPROCCIO TRADIZIONALE APPROCCIO MODERNO Variabilità Variabilita casuale + completamente dipendente
La verità giace in un ambito molto ristretto, ma l errore è immenso... Henry St John, Reflextion on Exile APPROCCIO TRADIZIONALE APPROCCIO MODERNO Variabilità Variabilita casuale + completamente dipendente
Regolazione e controllo
 1 Regolazione e controllo Controllo ad Mikael Bianchi, Ricercatore SUPSI 19 maggio 2017 2 Tematiche Controllo ad Obiettivi Problematiche Inversione del processo con modello di riferimento Effetti dei disturbi
1 Regolazione e controllo Controllo ad Mikael Bianchi, Ricercatore SUPSI 19 maggio 2017 2 Tematiche Controllo ad Obiettivi Problematiche Inversione del processo con modello di riferimento Effetti dei disturbi
Modulo di Fisica (F-N) A.A MECCANICA
 A.A MECCANICA") Modulo di Fisica (F-N) A.A. 2016-2017 MECCANICA COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. COSA E LA MECCANICA? Viene tradizionalmente suddivisa in: CINEMATICA DINAMICA
Modulo di Fisica (F-N) A.A. 2016-2017 MECCANICA COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. COSA E LA MECCANICA? Viene tradizionalmente suddivisa in: CINEMATICA DINAMICA
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot Motion Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot Motion Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models
Soluzione Flessibile per la Misura
 Soluzione Flessibile per la Misura ad Alta Precisione OPTOFLASH Optoflash è la soluzione Marposs di ultima generazione per misure ottiche di precisione. Progettato per alberi di piccola taglia, viterie
Soluzione Flessibile per la Misura ad Alta Precisione OPTOFLASH Optoflash è la soluzione Marposs di ultima generazione per misure ottiche di precisione. Progettato per alberi di piccola taglia, viterie
trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico
 Problemi da risolvere navigazione trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico copertura passare un sensore o un attuatore su tutti i punti che
Problemi da risolvere navigazione trovare un percorso senza collisioni per passare da una configurazione ad un altra del sistema robotico copertura passare un sensore o un attuatore su tutti i punti che
Coordinate e Sistemi di Riferimento
 Coordinate e Sistemi di Riferimento Sistemi di riferimento Quando vogliamo approcciare un problema per risolverlo quantitativamente, dobbiamo per prima cosa stabilire in che sistema di riferimento vogliamo
Coordinate e Sistemi di Riferimento Sistemi di riferimento Quando vogliamo approcciare un problema per risolverlo quantitativamente, dobbiamo per prima cosa stabilire in che sistema di riferimento vogliamo
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 5 Marzo 004 Esercizio 1 Si consideri un robot mobile a due ruote ad orientamento fisso (ed una passiva riorientabile e non centrata di appoggio) comandate indipendentemente
Prova Scritta di Robotica I 5 Marzo 004 Esercizio 1 Si consideri un robot mobile a due ruote ad orientamento fisso (ed una passiva riorientabile e non centrata di appoggio) comandate indipendentemente
Prova Scritta di Robotica I
 Prova Scritta di Robotica I 11 Settembre 2008 Esercizio Si consideri il manipolatore mobile in figura, costituito da una base mobile su ruote car-like con a bordo un manipolatore 2R planare. Siano: (x,
Prova Scritta di Robotica I 11 Settembre 2008 Esercizio Si consideri il manipolatore mobile in figura, costituito da una base mobile su ruote car-like con a bordo un manipolatore 2R planare. Siano: (x,
Introduzione ai filtri digitali
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Sistemi, misura e predizione
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Sistemi, misura e predizione
a.a. : Ore: 56 Crediti totali: 6 Tipologia di insegnamento: intero Docente: Prof. Emilio Mariotti associato
 Titolo: FISICA SPERIMENTALE per geologia (I modulo, mutuato come Istituzioni di Fisica da Scienze Naturali e Scienze Ambientali) Facoltà: Scienze M.F.N. a.a. : 2004-2005 Ore: 56 Crediti totali: 6 Tipologia
Titolo: FISICA SPERIMENTALE per geologia (I modulo, mutuato come Istituzioni di Fisica da Scienze Naturali e Scienze Ambientali) Facoltà: Scienze M.F.N. a.a. : 2004-2005 Ore: 56 Crediti totali: 6 Tipologia
CORPO RIGIDO MOMENTO DI UNA FORZA EQUILIBRIO DI UN CORPO RIGIDO CENTRO DI MASSA BARICENTRO
 LEZIONE statica-1 CORPO RIGIDO MOMENTO DI UNA FORZA EQUILIBRIO DI UN CORPO RIGIDO CENTRO DI MASSA BARICENTRO GRANDEZZE SCALARI E VETTORIALI: RICHIAMI DUE SONO LE TIPOLOGIE DI GRANDEZZE ESISTENTI IN FISICA
LEZIONE statica-1 CORPO RIGIDO MOMENTO DI UNA FORZA EQUILIBRIO DI UN CORPO RIGIDO CENTRO DI MASSA BARICENTRO GRANDEZZE SCALARI E VETTORIALI: RICHIAMI DUE SONO LE TIPOLOGIE DI GRANDEZZE ESISTENTI IN FISICA
Sistemi di corpi La prossima lezione faremo esercizi con volontari alla lavagna
 Sistemi di corpi La prossima lezione faremo esercizi con volontari alla lavagna Esercizio 1 [Urti elastici] Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro
Sistemi di corpi La prossima lezione faremo esercizi con volontari alla lavagna Esercizio 1 [Urti elastici] Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro
Componenti per la robotica: Sistemi di misura e Sensori propriocettivi
 Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Freni. I freni sono dispositivi atti a creare resistenza al moto allo scopo di impedirne l inizio o per regolarne la velocità o l accelerazione.
 Generalità Freni I freni sono dispositivi atti a creare resistenza al moto allo scopo di impedirne l inizio o per regolarne la velocità o l accelerazione. A seconda del tipo di resistenza si distinguono
Generalità Freni I freni sono dispositivi atti a creare resistenza al moto allo scopo di impedirne l inizio o per regolarne la velocità o l accelerazione. A seconda del tipo di resistenza si distinguono
Confronto fra gruppi: il metodo ANOVA. Nicola Tedesco (Statistica Sociale) Confronto fra gruppi: il metodo ANOVA 1 / 23
 Confronto fra gruppi: il metodo ANOVA 1 / 23") Confronto fra gruppi: il metodo ANOVA Nicola Tedesco (Statistica Sociale) Confronto fra gruppi: il metodo ANOVA 1 / 23 1 Nella popolazione, per ciascun gruppo la distribuzione della variabile risposta
Confronto fra gruppi: il metodo ANOVA Nicola Tedesco (Statistica Sociale) Confronto fra gruppi: il metodo ANOVA 1 / 23 1 Nella popolazione, per ciascun gruppo la distribuzione della variabile risposta
Lezione 09: Sistemi di corpi
 Esercizio 1 [Urti elastici] Lezione 09: Sistemi di corpi Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro una biglia P 2 inizialmente ferma di massa m 1 =
Esercizio 1 [Urti elastici] Lezione 09: Sistemi di corpi Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro una biglia P 2 inizialmente ferma di massa m 1 =
Tipi di polso robotico 2 gdl
 Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
Tipi di polso robotico 2 gdl I polsi possono avere 2 o 3 giunti = 2 o 3 gdl I polsi sono tutti R, ma con caratteristiche diverse Per alcuni compiti bastano polsi 2R come illustrato 005/1 Tipi di polso
PROGRAMMA SVOLTO NELLA CLASSE CLASSE I B
 Anno scolastico 2015/2016 Liceo Cicerone Pollione Sezione Classica "Vitruvio Pollione" Via Div. Julia Formia Tel. 0771-771.261 PROGRAMMA SVOLTO NELLA CLASSE CLASSE I B Matematica e fisica Prof. Francesco
Anno scolastico 2015/2016 Liceo Cicerone Pollione Sezione Classica "Vitruvio Pollione" Via Div. Julia Formia Tel. 0771-771.261 PROGRAMMA SVOLTO NELLA CLASSE CLASSE I B Matematica e fisica Prof. Francesco
Rotazioni. Debora Botturi ALTAIR. Debora Botturi. Laboratorio di Sistemi e Segnali
 Rotazioni ALTAIR http://metropolis.sci.univr.it Argomenti Propietá di base della rotazione Argomenti Argomenti Propietá di base della rotazione Leggi base del moto Inerzia, molle, smorzatori, leve ed ingranaggi
Rotazioni ALTAIR http://metropolis.sci.univr.it Argomenti Propietá di base della rotazione Argomenti Argomenti Propietá di base della rotazione Leggi base del moto Inerzia, molle, smorzatori, leve ed ingranaggi
Risoluzioni di alcuni esercizi
 Risoluzioni di alcuni esercizi Reti topografiche, trasformazioni di coordinate piane In una poligonale piana il punto è nell origine delle coordinate, l angolo (in verso orario fra il semiasse positivo
Risoluzioni di alcuni esercizi Reti topografiche, trasformazioni di coordinate piane In una poligonale piana il punto è nell origine delle coordinate, l angolo (in verso orario fra il semiasse positivo
A spasso su Marte: modelli software per la cinematica di robot mobili
 A spasso su Marte: modelli software per la cinematica di robot mobili Davide Brugali Incontri Scientifici in Facoltà 30 Gennaio 2008 Didattica e Ricerca Corso di Laurea Specialistica in Ingegneria Informatica
A spasso su Marte: modelli software per la cinematica di robot mobili Davide Brugali Incontri Scientifici in Facoltà 30 Gennaio 2008 Didattica e Ricerca Corso di Laurea Specialistica in Ingegneria Informatica
Robot Mobili su Ruote Analisi, Pianificazione, Controllo
 Corso di Robotica 1 Robot Mobili su Ruote Analisi, Pianificazione, Controllo Prof. Alessandro De Luca Robotica 1 1 Sommario uso dei modelli cinematici di WMR analisi di controllabilità* (sistemi non lineari)
Corso di Robotica 1 Robot Mobili su Ruote Analisi, Pianificazione, Controllo Prof. Alessandro De Luca Robotica 1 1 Sommario uso dei modelli cinematici di WMR analisi di controllabilità* (sistemi non lineari)
Una approssimazione allo spazio della fisica classica. Spazi affini euclidei.
 Una approssimazione allo spazio della fisica classica. Spazi affini euclidei. Federico Lastaria. Analisi e Geometria 1. Una introduzione allo spazio della fisica classica. 1/20 Lo spazio E 3 (il piano
Una approssimazione allo spazio della fisica classica. Spazi affini euclidei. Federico Lastaria. Analisi e Geometria 1. Una introduzione allo spazio della fisica classica. 1/20 Lo spazio E 3 (il piano
3 - Calcolo del Punto di progetto.
 3 - Calcolo del Punto di progetto. 3.1 Il punto di progetto Scopo di questo calcolo è quello di determinare due parametri di progetto fondamentali del velivolo: il carico alare ed il rapporto spinta-peso.
3 - Calcolo del Punto di progetto. 3.1 Il punto di progetto Scopo di questo calcolo è quello di determinare due parametri di progetto fondamentali del velivolo: il carico alare ed il rapporto spinta-peso.
Regressione. Apprendimento supervisionato //Regressione. Corso di Sistemi di Elaborazione dell Informazione
 Regressione SCUOLA DI SPECIALIZZAZIONE IN FISICA MEDICA Corso di Sistemi di Elaborazione dell Informazione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it
Regressione SCUOLA DI SPECIALIZZAZIONE IN FISICA MEDICA Corso di Sistemi di Elaborazione dell Informazione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it
Progettazione e realizzazione di una base robotica bilanciante su ruote
 Politecnico di Milano Corso di Laurea in Ingegneria Elettronica Dipartimento di Elettronica e Informazione Progettazione e realizzazione di una base robotica bilanciante su ruote Martino Migliavacca AI
Politecnico di Milano Corso di Laurea in Ingegneria Elettronica Dipartimento di Elettronica e Informazione Progettazione e realizzazione di una base robotica bilanciante su ruote Martino Migliavacca AI
Pianificazione del moto tra ostacoli
 Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello
Corso di Robotica 2 Pianificazione del moto tra ostacoli Introduzione Prof. Alessandro De Luca A. De Luca Sistemi robotici KB2017 Dual arm UB Hand - II sistemi multi-articolati di corpi comandati nello
Corso di STATISTICA EGA - Classe 1 aa Docenti: Luca Frigau, Claudio Conversano
 Corso di STATISTICA EGA - Classe 1 aa 2017-2018 Docenti: Luca Frigau, Claudio Conversano Il corso è organizzato in 36 incontri, per un totale di 72 ore di lezione. Sono previste 18 ore di esercitazione
Corso di STATISTICA EGA - Classe 1 aa 2017-2018 Docenti: Luca Frigau, Claudio Conversano Il corso è organizzato in 36 incontri, per un totale di 72 ore di lezione. Sono previste 18 ore di esercitazione
Modelli tradizionali e statistici applicati alla percezione (2/2) Francesco Panerai
 Francesco Panerai") Modelli tradizionali e statistici applicati alla percezione (2/2) Francesco Panerai Modulo integrativo del corso di - Sistemi Intelligenti Naturali e Artificiali - 2002/2003 Elementi di statistica bayesiana
Modelli tradizionali e statistici applicati alla percezione (2/2) Francesco Panerai Modulo integrativo del corso di - Sistemi Intelligenti Naturali e Artificiali - 2002/2003 Elementi di statistica bayesiana
Acquisizione Dati. Introduzione
 UNIVERSITÀ DEGLI STUDI DI CAGLIARI Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali Corso di Sperimentazione sulle Macchine Acquisizione Dati Introduzione Introduzione In campo scientifico
UNIVERSITÀ DEGLI STUDI DI CAGLIARI Dipartimento di Ingegneria Meccanica, Chimica e dei Materiali Corso di Sperimentazione sulle Macchine Acquisizione Dati Introduzione Introduzione In campo scientifico
DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA
 DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA Sia dato un sistema con vincoli lisci, bilaterali e FISSI. Ricaviamo, dall equazione simbolica della dinamica, il teorema
DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA Sia dato un sistema con vincoli lisci, bilaterali e FISSI. Ricaviamo, dall equazione simbolica della dinamica, il teorema
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica
 CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
CONTROLLO E LOCALIZZAZIONE DI UN ROBOT MOBILE IN UN SISTEMA DI RIFERIMENTO ASSOLUTO Corso di Laurea in Fisica Candidato: Gianluca Deninno Relatore: Mario Bertaina Relatore aziendale: Ivano Musso (ALTEC)
Classe III Aritmetica e Algebra Dati e previsioni Geometria Geometria
 Classe III U. D. 1 Equazioni e disequazioni (ripasso) Aritmetica e Algebra Equazioni algebriche numeriche con δ 2. Disequazioni algebriche numeriche con δ 2. Sistemi di equazioni e/o disequazioni algebriche
Classe III U. D. 1 Equazioni e disequazioni (ripasso) Aritmetica e Algebra Equazioni algebriche numeriche con δ 2. Disequazioni algebriche numeriche con δ 2. Sistemi di equazioni e/o disequazioni algebriche
FM210 / MA - Seconda prova pre-esonero ( ) R cos u. dove h è una costante positiva. Oltre alla forza peso, l asta è soggetta ad una forza
 R cos u. dove h è una costante positiva. Oltre alla forza peso, l asta è soggetta ad una forza") FM10 / MA - Seconda prova pre-esonero (6-5-017) Esercizio 1. Un asta rigida omogenea AB di lunghezza R e massa M è vincolata ad avere l estremo A sull asse fisso x, orientato verticalmente verso l alto,
FM10 / MA - Seconda prova pre-esonero (6-5-017) Esercizio 1. Un asta rigida omogenea AB di lunghezza R e massa M è vincolata ad avere l estremo A sull asse fisso x, orientato verticalmente verso l alto,
Modelli cinematici. per gli studenti del corso di Stima e identificazione. Luigi Chisci, 20 Maggio 2011
 Modelli cinematici per gli studenti del corso di Stima e identificazione Luigi Chisci, Maggio Nei problemi di stima del moto (eg tracing e navigazione) si fa uso di un modello di stato del moto nella forma:
Modelli cinematici per gli studenti del corso di Stima e identificazione Luigi Chisci, Maggio Nei problemi di stima del moto (eg tracing e navigazione) si fa uso di un modello di stato del moto nella forma:
Università degli Studi di Roma Tor Vergata
 Università degli Studi di Roma Tor Vergata CANDIDATO: RELATORE: CORRELATORE: Ing. Daniele Carnevale Ing. Francesco Martinelli ATTUAZIONE DI UN SENSORE AD INFRAROSSI PER LA MAPPATURA DI AMBIENTI E L INSEGUIMENTO
Università degli Studi di Roma Tor Vergata CANDIDATO: RELATORE: CORRELATORE: Ing. Daniele Carnevale Ing. Francesco Martinelli ATTUAZIONE DI UN SENSORE AD INFRAROSSI PER LA MAPPATURA DI AMBIENTI E L INSEGUIMENTO
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE
 UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE ESAME DI MECCANICA PRIMA PARTE Corso di Laurea in Ingegneria Biomedica 2 Luglio 2018 Esercizio 1 In figura è rappresentato un dispositivo
UNIVERSITÀ DI PISA DIPARTIMENTO DI INGEGNERIA CIVILE E INDUSTRIALE ESAME DI MECCANICA PRIMA PARTE Corso di Laurea in Ingegneria Biomedica 2 Luglio 2018 Esercizio 1 In figura è rappresentato un dispositivo
x ;x Soluzione Gli intervalli di confidenza possono essere ottenuti a partire dalla seguente identità: da cui si ricava: IC x ;x = +
 ESERCIZIO 6.1 Si considerino i 0 campioni di ampiezza n = estratti da una popolazione X di N = 5 elementi distribuiti normalmente, con media µ = 13,6 e σ = 8,33. A partire dalle 0 determinazioni della
ESERCIZIO 6.1 Si considerino i 0 campioni di ampiezza n = estratti da una popolazione X di N = 5 elementi distribuiti normalmente, con media µ = 13,6 e σ = 8,33. A partire dalle 0 determinazioni della
TEORIA DEI SISTEMI E DEL CONTROLLO LM in Ingegneria Informatica e Ingegneria Elettronica
 TEORIA DEI SISTEMI E DEL CONTROLLO LM in Ingegneria Informatica e Ingegneria Elettronica http://www.dii.unimore.it/~lbiagiotti/teoriasistemicontrollo.html Stima dello stato in presenza di disturbi: il
TEORIA DEI SISTEMI E DEL CONTROLLO LM in Ingegneria Informatica e Ingegneria Elettronica http://www.dii.unimore.it/~lbiagiotti/teoriasistemicontrollo.html Stima dello stato in presenza di disturbi: il
Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza. Locomozione Bipede. Fabio Zonfrilli. Corso di Robotica II 11 Febbraio 2004
 Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza Locomozione Bipede Fabio Zonfrilli Corso di Robotica II 11 Febbraio 2004 Sommario Tipologie di sistemi bipedi Passive walkers Hopping
Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza Locomozione Bipede Fabio Zonfrilli Corso di Robotica II 11 Febbraio 2004 Sommario Tipologie di sistemi bipedi Passive walkers Hopping
Elettronica per la telematica 03/03/2006
 Unità A: Amplificatori, oscillatori, mixer Lezione A.2 Filtri Specifica funzionale e parametri uso di strumenti CAD esempi di realizzazioni con AO tecniche SC 1 Contenuto dell unità A Lezione A2 Informazioni
Unità A: Amplificatori, oscillatori, mixer Lezione A.2 Filtri Specifica funzionale e parametri uso di strumenti CAD esempi di realizzazioni con AO tecniche SC 1 Contenuto dell unità A Lezione A2 Informazioni
ESERCIZI VI TARATURA DI SISTEMI INERZIALI
 Esercizi VI 1 ESERCIZI VI TARATURA DI SISTEMI INERZIALI Esercizio I.1. Introduzione Lo scopo della presente esercitazione è di implementare diverse tecniche di taratura per i sensori inerziali che equipaggiano
Esercizi VI 1 ESERCIZI VI TARATURA DI SISTEMI INERZIALI Esercizio I.1. Introduzione Lo scopo della presente esercitazione è di implementare diverse tecniche di taratura per i sensori inerziali che equipaggiano
Corso di Radioastronomia 1
 Corso di Radioastronomia 1 Aniello (Daniele) Mennella Dipartimento di Fisica Quinta parte: interferometria Parte 5, Lezione 2 Interferometria a sintesi di apertura Il principio di ricostruzione dell immagine
Corso di Radioastronomia 1 Aniello (Daniele) Mennella Dipartimento di Fisica Quinta parte: interferometria Parte 5, Lezione 2 Interferometria a sintesi di apertura Il principio di ricostruzione dell immagine
Modellistica dei Manipolatori Industriali 01BTT Esame del 18/02/2002 Soluzione
 Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Modellistica dei Manipolatori Industriali BTT Esame del 8/2/22 Soluzione Sistemi di riferimento e cinematica di posizione In Figura a) il manipolatore è stato ridisegnato per mettere in evidenza variabili
Basi matematiche per il Machine Learning
 Basi matematiche per il Machine Learning Corso di AA, anno 2017/18, Padova Fabio Aiolli 04 Ottobre 2017 Fabio Aiolli Basi matematiche per il Machine Learning 04 Ottobre 2017 1 / 14 Probabilità Un esperimento
Basi matematiche per il Machine Learning Corso di AA, anno 2017/18, Padova Fabio Aiolli 04 Ottobre 2017 Fabio Aiolli Basi matematiche per il Machine Learning 04 Ottobre 2017 1 / 14 Probabilità Un esperimento
Indice. Prefazione. 4 Sintesi della distribuzione di un carattere La variabilità Introduzione La variabilità di una distribuzione 75
 00PrPag:I-XIV_prefazione_IAS 8-05-2008 17:56 Pagina V Prefazione XI 1 La rilevazione dei fenomeni statistici 1 1.1 Introduzione 1 1.2 Caratteri, unità statistiche e collettivo 1 1.3 Classificazione dei
00PrPag:I-XIV_prefazione_IAS 8-05-2008 17:56 Pagina V Prefazione XI 1 La rilevazione dei fenomeni statistici 1 1.1 Introduzione 1 1.2 Caratteri, unità statistiche e collettivo 1 1.3 Classificazione dei
Grandezze angolari. Lineare Angolare Relazione x θ x = rθ. m I I = mr 2 F N N = rf sin θ 1 2 mv2 1
 Grandezze angolari Lineare Angolare Relazione x θ x = rθ v ω v = ωr a α a = αr m I I = mr 2 F N N = rf sin θ 1 2 mv2 1 2 Iω 2 Energia cinetica In forma vettoriale: v = ω r questa collega la velocità angolare
Grandezze angolari Lineare Angolare Relazione x θ x = rθ v ω v = ωr a α a = αr m I I = mr 2 F N N = rf sin θ 1 2 mv2 1 2 Iω 2 Energia cinetica In forma vettoriale: v = ω r questa collega la velocità angolare
Test delle Ipotesi Parte I
 Test delle Ipotesi Parte I Test delle Ipotesi sulla media Introduzione Definizioni basilari Teoria per il caso di varianza nota Rischi nel test delle ipotesi Teoria per il caso di varianza non nota Test
Test delle Ipotesi Parte I Test delle Ipotesi sulla media Introduzione Definizioni basilari Teoria per il caso di varianza nota Rischi nel test delle ipotesi Teoria per il caso di varianza non nota Test
convertitore D/A convertitore A/D
 n bit linee digitali N =2 n livelli range o dinamica tensione analogica d'ingresso IN IN convertitore D/A convertitore A/D OUT 1 filo linea analogica la tensione v out è quantizzata OUT n bit o N livelli
n bit linee digitali N =2 n livelli range o dinamica tensione analogica d'ingresso IN IN convertitore D/A convertitore A/D OUT 1 filo linea analogica la tensione v out è quantizzata OUT n bit o N livelli
Controllo ultrasonoro mediante Phased Array di saldature alluminotermiche in rotaie ferroviarie
 Controllo ultrasonoro mediante Phased Array di saldature alluminotermiche in rotaie ferroviarie Michele CARBONI, Stefano BERETTA, Paolo TERRANOVA, FERROVIENORD del problema 2 Lunga rotaia saldata (l.r.s)
Controllo ultrasonoro mediante Phased Array di saldature alluminotermiche in rotaie ferroviarie Michele CARBONI, Stefano BERETTA, Paolo TERRANOVA, FERROVIENORD del problema 2 Lunga rotaia saldata (l.r.s)
ECONOMETRIA: Laboratorio I
 ECONOMETRIA: Laboratorio I Luca De Angelis CLASS - Università di Bologna Programma Laboratorio I Valori attesi e varianze Test di ipotesi Stima di un modello lineare attraverso OLS Valore atteso Data una
ECONOMETRIA: Laboratorio I Luca De Angelis CLASS - Università di Bologna Programma Laboratorio I Valori attesi e varianze Test di ipotesi Stima di un modello lineare attraverso OLS Valore atteso Data una
Compito d esame 14/11/2005
 COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
COGNOME NOME Compito d esame 14/11/2005 modulo 01CFI Robotica AA 2004/05 modulo 01CFI Robotica AA 2003/04 modulo 01BTT Modellistica dei manipolatori industriali modulo 01ALB Controllo dei Manipolatori
DINAMICA DELLE VIBRAZIONI LIBERE DEI SISTEMI A UN GRADO DI LIBERTÁ (SDOF)
") INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF) M. Bozza Copyright AEPRON Tutti i iritti Riservati - www.adepron.it INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF)
INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF) M. Bozza Copyright AEPRON Tutti i iritti Riservati - www.adepron.it INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF)
C.I. di Metodologia clinica
 C.I. di Metodologia clinica Modulo 5. I metodi per la sintesi e la comunicazione delle informazioni sulla salute Quali errori influenzano le stime? L errore casuale I metodi per la produzione delle informazioni
C.I. di Metodologia clinica Modulo 5. I metodi per la sintesi e la comunicazione delle informazioni sulla salute Quali errori influenzano le stime? L errore casuale I metodi per la produzione delle informazioni
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Specialistica di Ingegneria dell Automazione Dettate dal Prof.
Dinamica Rotazionale
 Dinamica Rotazionale Richiamo: cinematica rotazionale, velocità e accelerazione angolare Energia cinetica rotazionale: momento d inerzia Equazione del moto rotatorio: momento delle forze Leggi di conservazione
Dinamica Rotazionale Richiamo: cinematica rotazionale, velocità e accelerazione angolare Energia cinetica rotazionale: momento d inerzia Equazione del moto rotatorio: momento delle forze Leggi di conservazione
ELABORAZIONE E CODIFICA DI IMMAGINI BITONALI
 Università degli Studi di Trieste Corso di Elaborazione Elettronica di Immagini II ELABORAZIONE E CODIFICA DI IMMAGINI BITONALI Sommario Parte 1 1 2 3 Parte 2 4 Codifica CCITT Fax 5 Codifica JBIG2 Proprietà
Università degli Studi di Trieste Corso di Elaborazione Elettronica di Immagini II ELABORAZIONE E CODIFICA DI IMMAGINI BITONALI Sommario Parte 1 1 2 3 Parte 2 4 Codifica CCITT Fax 5 Codifica JBIG2 Proprietà
5 DETERMINAZIONE DELL'INCERTEZZA TIPO COMPOSTA Grandezze d'ingresso incorrelate Grandezze d'ingresso correlate...
 INDICE PREMESSA 1 0 INTRODUZIONE 3 1 SCOPO E CAMPO DI APPLICAZIONE 4 DEFINIZIONI 5.1 Termini metrologici generali... 5. Il termine "incertezza"... 6.3 Termini specifici della presente Guida... 6 3 CONCETTI
INDICE PREMESSA 1 0 INTRODUZIONE 3 1 SCOPO E CAMPO DI APPLICAZIONE 4 DEFINIZIONI 5.1 Termini metrologici generali... 5. Il termine "incertezza"... 6.3 Termini specifici della presente Guida... 6 3 CONCETTI
I MOTI NEL PIANO. Vettore posizione e vettore spostamento
 I MOTI NEL IANO Vettore posizione e vettore spostamento Si parla di moto in un piano quando lo spostamento non avviene lungo una retta, ma in un piano, e può essere descritto usando un sistema di riferimento
I MOTI NEL IANO Vettore posizione e vettore spostamento Si parla di moto in un piano quando lo spostamento non avviene lungo una retta, ma in un piano, e può essere descritto usando un sistema di riferimento
Application Notes AP 1114
 Application Notes AP 1114 Misura Laser Senza Contatto dell Errore di Rotazione del Mandrino. I. Quale è il problema da risolvere? Nel mondo produttivo moderno, vengono frequentemente richieste macchine
Application Notes AP 1114 Misura Laser Senza Contatto dell Errore di Rotazione del Mandrino. I. Quale è il problema da risolvere? Nel mondo produttivo moderno, vengono frequentemente richieste macchine
CANALE STAZIONARIO CANALE TEMPO INVARIANTE
 CANALE STAZIONARIO Si parla di un Canale Stazionario quando i fenomeni che avvengono possono essere modellati da processi casuali e le proprietà statistiche di tali processi sono indipendenti dal tempo.
CANALE STAZIONARIO Si parla di un Canale Stazionario quando i fenomeni che avvengono possono essere modellati da processi casuali e le proprietà statistiche di tali processi sono indipendenti dal tempo.
Informazioni logistiche e organizzative Applicazione di riferimento. caratteristiche e tipologie di moduli. Circuiti con operazionali reazionati
 Elettronica per telecomunicazioni Contenuto dell unità A Informazioni logistiche e organizzative Applicazione di riferimento caratteristiche e tipologie di moduli Circuiti con operazionali reazionati amplificatori
Elettronica per telecomunicazioni Contenuto dell unità A Informazioni logistiche e organizzative Applicazione di riferimento caratteristiche e tipologie di moduli Circuiti con operazionali reazionati amplificatori
Architettura del Motion Control. Cinematica di un Robot mobile su due ruote indipendenti
 Architettura Software del Motion Control Cinematica di un Robot mobile su due ruote indipendenti ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università
Architettura Software del Motion Control Cinematica di un Robot mobile su due ruote indipendenti ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 1 Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, M. Ermidoro 1 Introduzione all automazione industriale Università degli
Corso di Automazione industriale Lezione 1 Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2018/2019, M. Ermidoro 1 Introduzione all automazione industriale Università degli
Argomenti della lezione: Campionamento Stima Distribuzione campionaria Campione Popolazione Sottoinsieme degli elementi (o universo) dell '
 dell '") Lezione 2 Argomenti della lezione: La statistica inferenziale: concetti di base Campionamento Stima Distribuzione campionaria Popolazione (o universo) Insieme di tutti gli elementi cui si rivolge il ricercatore
Lezione 2 Argomenti della lezione: La statistica inferenziale: concetti di base Campionamento Stima Distribuzione campionaria Popolazione (o universo) Insieme di tutti gli elementi cui si rivolge il ricercatore
Modelli Statistici per l Economia. Regressione lineare con un singolo regressore (terza parte)
") Modelli Statistici per l Economia Regressione lineare con un singolo regressore (terza parte) 1 Verifica di ipotesi su β 1 H 0 : β 1 = β 1,0 H 1 : β 1 β 1,0 Se è vera H 0 (cioè sotto H 0 ) e n è grande,
Modelli Statistici per l Economia Regressione lineare con un singolo regressore (terza parte) 1 Verifica di ipotesi su β 1 H 0 : β 1 = β 1,0 H 1 : β 1 β 1,0 Se è vera H 0 (cioè sotto H 0 ) e n è grande,
Dinamica del corpo rigido
 Dinamica del corpo rigido Antonio Pierro Definizione di corpo rigido Moto di un corpo rigido Densità Momento angolare Momento d'inerzia Per consigli, suggerimenti, eventuali errori o altro potete scrivere
Dinamica del corpo rigido Antonio Pierro Definizione di corpo rigido Moto di un corpo rigido Densità Momento angolare Momento d'inerzia Per consigli, suggerimenti, eventuali errori o altro potete scrivere
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina
 Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si consideri un cilindro rigido libero in moto rispetto a un osservatore. Sia O il punto occupato
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si consideri un cilindro rigido libero in moto rispetto a un osservatore. Sia O il punto occupato
Classificazione Mario Guarracino Data Mining a.a. 2010/2011
 Classificazione Mario Guarracino Data Mining a.a. 2010/2011 Introduzione I modelli di classificazione si collocano tra i metodi di apprendimento supervisionato e si rivolgono alla predizione di un attributo
Classificazione Mario Guarracino Data Mining a.a. 2010/2011 Introduzione I modelli di classificazione si collocano tra i metodi di apprendimento supervisionato e si rivolgono alla predizione di un attributo
Sensori 3D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Sensori 3D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Map representations Point cloud Elevation map Multi-level Surface map Octree (occupancy grid) 2 from Wurm et al., OctoMap:
Sensori 3D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Map representations Point cloud Elevation map Multi-level Surface map Octree (occupancy grid) 2 from Wurm et al., OctoMap:
Prefazione Ringraziamenti dell'editore Il sito web dedicato al libro Test online: la piattaforma McGraw-Hill Education Guida alla lettura
 INDICE GENERALE Prefazione Ringraziamenti dell'editore Il sito web dedicato al libro Test online: la piattaforma McGraw-Hill Education Guida alla lettura XI XIV XV XVII XVIII 1 LA RILEVAZIONE DEI FENOMENI
INDICE GENERALE Prefazione Ringraziamenti dell'editore Il sito web dedicato al libro Test online: la piattaforma McGraw-Hill Education Guida alla lettura XI XIV XV XVII XVIII 1 LA RILEVAZIONE DEI FENOMENI
Programma svolto di Matematica classe 4F a.s Prof. Giacomo Di Iorio
 Programma svolto di Matematica classe 4F a.s. 2018-19 Prof. Giacomo Di Iorio Studio individuale e di ricapitolazione Funzione esponenziale: proprietà. Equazioni esponenziali Disequazioni esponenziali.
Programma svolto di Matematica classe 4F a.s. 2018-19 Prof. Giacomo Di Iorio Studio individuale e di ricapitolazione Funzione esponenziale: proprietà. Equazioni esponenziali Disequazioni esponenziali.
STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
 Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Università del Salento Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Meccanica Tesi di Laurea in Meccanica del Veicolo STUDIO DI UN SISTEMA DI TRAZIONE INTEGRALE PER UN VEICOLO MOBILE
Ingegneria Elettrica Politecnico di Torino. Luca Carlone. ControlliAutomaticiI LEZIONE I
 Ingegneria Elettrica Politecnico di Torino Luca Carlone ControlliAutomaticiI LEZIONE I Sommario LEZIONE I Introduzione al concetto di sistema Notazione e tassonomia Rappresentazione in variabili di stato
Ingegneria Elettrica Politecnico di Torino Luca Carlone ControlliAutomaticiI LEZIONE I Sommario LEZIONE I Introduzione al concetto di sistema Notazione e tassonomia Rappresentazione in variabili di stato
Robotica I. Test 11 Novembre 2009
 Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Esercizio 1 Robotica I Test 11 Novembre 009 Si consideri una rappresentazione minimale dell orientamento data dalla seguente sequenza di angoli definiti rispetto a assi fissi: α intorno a Y ; β intorno
Il campionamento e l inferenza. Il campionamento e l inferenza
 Il campionamento e l inferenza Popolazione Campione Dai dati osservati mediante scelta campionaria si giunge ad affermazioni che riguardano la popolazione da cui essi sono stati prescelti Il campionamento
Il campionamento e l inferenza Popolazione Campione Dai dati osservati mediante scelta campionaria si giunge ad affermazioni che riguardano la popolazione da cui essi sono stati prescelti Il campionamento