Fondamenti di Automatica 5 Febbraio 2018 Teoria dei Sistemi 5 Febbraio 2018
|
|
|
- Antonia Ambra Venturini
- 4 anni fa
- Visualizzazioni
Transcript
, Reddito (R) e Consumi (C) a livello nazionale. L ingresso di controllo, S, rappresenta la Spesa Pubblica.")
1 Fondamenti di Automatica 5 Febbraio 2018 Teoria dei Sistemi 5 Febbraio 2018 Ia figura rappresenta la dinamica semplificata di un sistema macroeconomico keynesiano, determinato dall interazione fra Produzione (P), Reddito (R) e Consumi (C) a livello nazionale. L ingresso di controllo, S, rappresenta la Spesa Pubblica. Ciclicamente, il sistema è soggetto a variazioni sui livelli di consumo il cui effetto è rappresentato dalla variabile C D, che rappresenta un disturbo rispetto alla normale evoluzione del sistema. Inoltre, il modello è soggetto ad un disturbo costante che rappresenta l effetto del debito pregresso. Le equazioni che descrivono il modello sono: P = βs 2 πc Ċ = λ R δln( P P 0 ) + C D Ṙ = ρp ηc dove β è il fattore di scala sull ingresso mentre π, λ, δ, ρ, η sono i parametri che regolano l influenza reciproca fra i sottosistemi. Tutte le variabili ed i coefficienti coinvolti sono da considerarsi espressi secondo l opportuna unità di misura. La scala temporale è espressa in unità arbitrarie. Si assuma che gli analisti siano in grado di stimare il rapporto fra i valori di Reddito e di Consumo y = R C 1 Si determini la condizione di equilibrio del sistema in funzione di un valore di Reddito costante R = R e considerando nullo il disturbo C D. 2 Si determini una rappresentazione del sistema linearizzato in forma di stato attorno alla generica configurazione di equilibrio individuata al punto 1, considerando l ingresso S all equilibrio > 0 3 Si considerino i seguenti valori numerici per i parametri del modello: P 0 = 0.1; β = 3; π = 7; λ = 10; δ = 20; ρ = 40; η = 0.1; R = 10;. ˆ Si scrivano le matrici numeriche del sistema linearizzato in forma di stato; ˆ si ricavino le funzioni di trasferimento tra gli ingressi (di controllo S e di disturbo C D ) e l uscita y; ˆ si discuta circa la stabilità del sistema. Verificare che le funzioni di trasferimento abbiano approssimativamente la forma (s ) G(s) = (s )(s 16.14)(s 1.551) (s s ) G d (s) = (s )(s 16.14)(s 1.551) in caso negativo, per i punti successivi, è possibile utilizzare le funzioni di trasferimento qui fornite. 4 Si sintetizzi un controllore che, agendo sull ingresso S, e considerando condizioni iniziali per il sistema pari a quelle di equilibrio (ȳ = 0.05), rispetti le seguenti specifiche: 1
2 Si desidera che, imposto un riferimento a rampa per la spesa pubblica del tipo d(t) = 1t, l inseguimento si rifletta a regime in un errore massimo sull uscita di 0.1 unità. Si richiede inoltre che il sistema macroeconomico porti esattamente l uscita ad un valore di 1.05 senza mai superare il valore di Si consideri inoltre che, trascorso un intervallo di tempo pari a 1 unità temporale (ut), l uscita entri in un intervallo di [1, 1.1] senza mai uscirne. Si desidera reiettare completamente un disturbo costante di tipo C D = 10. Si desidera inoltre attenuare l effetto di un disturbo agente sul consumo C D = 100 sin (ω d t) agente per pulsazioni ω d < 0.1 rad/ut affinché le oscillazioni indotte sull uscita y siano caratterizzate da un ampiezza minore di In presenza di un rumore di misura - che modella l incertezza con cui gli analisti stimano l uscita - caratterizzato da pulsazioni ω ν > 100rad/ut, si richiede che l ampiezza dell effetto sull uscita sia inferiore al 10% del rumore stesso. Si riportino quindi, giustificando opportunamente tutti i passaggi: le specifiche tradotte nel dominio della frequenza e visualizzate sul diagramma di Bode, il procedimento di progettazione del controllore illustrato con diagrammi a blocchi, la funzione di trasferimento del controllore progettato, i diagrammi di Bode delle funzioni di trasferimento nelle diverse fasi del progetto (mostrando il raggiungimento delle specifiche e giustificando le scelte progettuali), la risposta al gradino del sistema controllato riportando le caratteristiche più significative e la verifica del soddisfacimento delle specifiche. Al fine di valutare quanto svolto al computer lo studente deve salvare ogni progetto del controllore effettuato con sisotool attraverso il comando Save Session che si trova nel sisotool stesso. Il nome del file da salvare deve essere nella forma CognomeMatricola i.mat con i numero del controllore progettato. Il numero del controllore progettato deve essere coerente con quanto scritto nel foglio. La versione elettronica del controllore verrà considerata solo nel caso di corrispondenza con quanto scritto nel foglio e pertanto NON sostituisce la descrizione cartacea del progetto del controllore richiesta nel compito. La valutazione dell esame è basata su quanto scritto sui fogli consegnati. OGNI passaggio ed ogni scelta di progettazione devono essere opportunamente giustificati su questi. 2
3
4
5
6


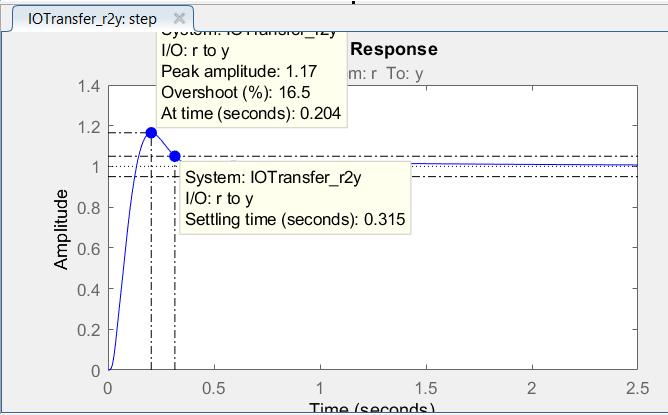
7 Bode, rlocus e step del sistema controllato
Fondamenti di Automatica 14 gennaio 2019 Teoria dei Sistemi 14 gennaio 2019
 Fondamenti di Automatica 14 gennaio 019 Teoria dei Sistemi 14 gennaio 019 Nel sistema di figura, che è disposto in un piano verticale, la piastra quadrata di lato l e massa M scorre senza attrito lungo
Fondamenti di Automatica 14 gennaio 019 Teoria dei Sistemi 14 gennaio 019 Nel sistema di figura, che è disposto in un piano verticale, la piastra quadrata di lato l e massa M scorre senza attrito lungo
Fondamenti di Automatica 24 luglio 2017 Teoria dei Sistemi 24 luglio 2017
 Fondamenti di Automatica 24 luglio 2017 Teoria dei Sistemi 24 luglio 2017 In una riserva naturale, si considerino una popolazione di antilopi ed una di gazzelle. Le rispettive numerosità (numero di individui)
Fondamenti di Automatica 24 luglio 2017 Teoria dei Sistemi 24 luglio 2017 In una riserva naturale, si considerino una popolazione di antilopi ed una di gazzelle. Le rispettive numerosità (numero di individui)
Fondamenti di Automatica 12 giugno 2017
 Fondamenti di Automatica 12 giugno 2017 Si consideri il sistema in figura che rappresenta una guida lineare vincolata a ruotare attorno all asse verticale r passante per uno dei suoi due estremi ed inclinata
Fondamenti di Automatica 12 giugno 2017 Si consideri il sistema in figura che rappresenta una guida lineare vincolata a ruotare attorno all asse verticale r passante per uno dei suoi due estremi ed inclinata
Fondamenti di Automatica 3 luglio 2017 Teoria dei Sistemi 3 luglio 2017
 Fondamenti di Automatica 3 luglio 2017 Teoria dei Sistemi 3 luglio 2017 x L R L/2 F d θ mg τ/r h = Lsin(θ) τ Le moto categoria MotoGP sono caratterizzate da coppie talmente elevate che possono portare
Fondamenti di Automatica 3 luglio 2017 Teoria dei Sistemi 3 luglio 2017 x L R L/2 F d θ mg τ/r h = Lsin(θ) τ Le moto categoria MotoGP sono caratterizzate da coppie talmente elevate che possono portare
Teoria dei Sistemi
 Teoria dei Sistemi 13-06-2016 Esercizio 1 In Figura sono riportati un sottomarino telecomandato da remoto (ROV) ed il suo modello nel piano di pitch (beccheggio). Il sistema ha massa M e momento di inerzia
Teoria dei Sistemi 13-06-2016 Esercizio 1 In Figura sono riportati un sottomarino telecomandato da remoto (ROV) ed il suo modello nel piano di pitch (beccheggio). Il sistema ha massa M e momento di inerzia
Fondamenti di Automatica
 Fondamenti di Automatica 23-2-216 In Figura 1 é riportata una rappresentazione concettuale del sistema dinamico costituito da una gamba con applicato un esoscheletro per aumentare la coppia disponibile
Fondamenti di Automatica 23-2-216 In Figura 1 é riportata una rappresentazione concettuale del sistema dinamico costituito da una gamba con applicato un esoscheletro per aumentare la coppia disponibile
Fondamenti di Automatica
 Fondamenti di Automatica 16-01-2017 In Figura è illustrato il modello dell infezione da HIV, in particolare si mostra come le cellule CD4+ sane interagiscono con quelle infette e con il virus libero (virus
Fondamenti di Automatica 16-01-2017 In Figura è illustrato il modello dell infezione da HIV, in particolare si mostra come le cellule CD4+ sane interagiscono con quelle infette e con il virus libero (virus
Teoria dei Sistemi
 Teoria dei Sistemi 25-07-206 In Figura è riportato il modello di un dispositivo rootico per l interazione con amienti virtuali. Si desidera infatti controllare una massa virtuale ( slave ) per mezzo di
Teoria dei Sistemi 25-07-206 In Figura è riportato il modello di un dispositivo rootico per l interazione con amienti virtuali. Si desidera infatti controllare una massa virtuale ( slave ) per mezzo di
(b) Falange con schematizzazione sistema elastico
 Falange con schematizzazione sistema elastico") Teoria dei Sistemi 04-0-06 La Pisa/IIT SoftHand (figura (c)) è una mano sottoattuata ad un grado di attuazione e 9 gradi di libertà, capace di afferrare una vasta gamma di oggetti grazie alle sue capacità
Teoria dei Sistemi 04-0-06 La Pisa/IIT SoftHand (figura (c)) è una mano sottoattuata ad un grado di attuazione e 9 gradi di libertà, capace di afferrare una vasta gamma di oggetti grazie alle sue capacità
Teoria dei Sistemi
 Teoria dei Sistemi 3--6 A In Figura è riportata una rappresentazione concettuale del sistema dinamico costituito da una gamba con applicato un esoscheletro per aumentare la coppia disponibile all articolazione
Teoria dei Sistemi 3--6 A In Figura è riportata una rappresentazione concettuale del sistema dinamico costituito da una gamba con applicato un esoscheletro per aumentare la coppia disponibile all articolazione
Teoria dei Sistemi s + 1 (s + 1)(s s + 100)
(s s + 100)") Teoria dei Sistemi 03-07-2015 A Dato il sistema dinamico rappresentato dalla funzione di trasferimento 10s + 1 (s + 1)(s 2 + 16s + 100) A.1 Si disegnino i diagrammi di Bode, Nyquist e i luoghi delle radici.
Teoria dei Sistemi 03-07-2015 A Dato il sistema dinamico rappresentato dalla funzione di trasferimento 10s + 1 (s + 1)(s 2 + 16s + 100) A.1 Si disegnino i diagrammi di Bode, Nyquist e i luoghi delle radici.
INGEGNERIA INFORMATICA
 ESERCIZIO Si consideri il seguente sistema S. INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 7/06/09 Prof. Marcello Farina TESTO DEGLI ESERCIZI E SOLUZIONI x = u (sin(πx)) A. Si scrivano le equazioni
ESERCIZIO Si consideri il seguente sistema S. INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 7/06/09 Prof. Marcello Farina TESTO DEGLI ESERCIZI E SOLUZIONI x = u (sin(πx)) A. Si scrivano le equazioni
Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 2006
 Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 26 Numero di matricola = 1α 1 = 1β 1 Si consideri lo schema di azionamento di una valvola rotativa riportato in fig1 Il sistema è costituito da tre
Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 26 Numero di matricola = 1α 1 = 1β 1 Si consideri lo schema di azionamento di una valvola rotativa riportato in fig1 Il sistema è costituito da tre
Regolazione e Controllo 15 Febbraio 2007
 Regolazione e Controllo 15 Febbraio 27 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 Si consideri lo schema di principio di apparato sperimentale riportato in fig.1. Figure 1: Muscolo Artificiale Il principale
Regolazione e Controllo 15 Febbraio 27 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 Si consideri lo schema di principio di apparato sperimentale riportato in fig.1. Figure 1: Muscolo Artificiale Il principale
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2010/ gennaio 2012
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2010/2011 10 gennaio 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2010/2011 10 gennaio 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
Regolazione e Controllo dei Sistemi Meccanici 9 Giugno 2005
 Regolazione e Controllo dei Sistemi Meccanici 9 Giugno 25 Numero di matricola =1α 1 =1β 1 =1γ 1 Si consideri il sistema riportato in fig.1 costituito da un rotore interno di inerzia I i e attuato da una
Regolazione e Controllo dei Sistemi Meccanici 9 Giugno 25 Numero di matricola =1α 1 =1β 1 =1γ 1 Si consideri il sistema riportato in fig.1 costituito da un rotore interno di inerzia I i e attuato da una
Fondamenti di Automatica
 Fondamenti di Automatica (Prof. Rocco) Anno accademico 2017/2018 Appello del 5 Settembre 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
Fondamenti di Automatica (Prof. Rocco) Anno accademico 2017/2018 Appello del 5 Settembre 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
1. Si individuino tutti i valori del parametro α per i quali il sistema assegnato è asintoticamente stabile.
 Appello di Fondamenti di Automatica (Gestionale) a.a. 2017-18 7 Settembre 2018 Prof. SILVIA STRADA Tempo a disposizione: 2 h. ESERCIZIO 1 Si consideri il sistema dinamico lineare invariante a tempo continuo
Appello di Fondamenti di Automatica (Gestionale) a.a. 2017-18 7 Settembre 2018 Prof. SILVIA STRADA Tempo a disposizione: 2 h. ESERCIZIO 1 Si consideri il sistema dinamico lineare invariante a tempo continuo
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff e le formule di base
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff e le formule di base
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 218 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 218 - Quiz Per ciascuno
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada 16 Luglio 2014
 a.a Prof. Silvia Strada 16 Luglio 2014") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2013-14 Prof. Silvia Strada 16 Luglio 2014 Nome e Cognome:........................... Matricola........................... Firma............................................................................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2013-14 Prof. Silvia Strada 16 Luglio 2014 Nome e Cognome:........................... Matricola........................... Firma............................................................................
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ giugno Soluzione
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 giugno 24 Esercizio In riferimento allo schema a blocchi in figura. y r s s s2 y 2 K s dove Domanda.. Determinare una realizzazione in equazioni di
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 giugno 24 Esercizio In riferimento allo schema a blocchi in figura. y r s s s2 y 2 K s dove Domanda.. Determinare una realizzazione in equazioni di
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ luglio Soluzione
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
Figura 1: Sistema dinamico e rappresentazione schematica della tendenza al parallelismo.
 Fondamenti di Automatica 15-1-216 Si consideri il sistema di Figura 1. Esso è composto da tre corpi: all estremità di un pendolo inverso è incernierato un telaio nel quale alloggia una ruota giroscopica.
Fondamenti di Automatica 15-1-216 Si consideri il sistema di Figura 1. Esso è composto da tre corpi: all estremità di un pendolo inverso è incernierato un telaio nel quale alloggia una ruota giroscopica.
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Appello del 24 Settembre 2015
 a.a Prof. Silvia Strada Appello del 24 Settembre 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Appello del 24 Settembre 2015 Nome e Cognome:........................... Matricola...........................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Appello del 24 Settembre 2015 Nome e Cognome:........................... Matricola...........................
Fondamenti di Automatica K L. Figura 1: Sistema meccanico
 Fondamenti di Automatica 14-1-14 Si consideri il sistema meccanico rappresentato in figura 1. y ω g λ θ K T K L A b T L x Figura 1: Sistema meccanico Il sistema meccanico è costituito da un cilindro di
Fondamenti di Automatica 14-1-14 Si consideri il sistema meccanico rappresentato in figura 1. y ω g λ θ K T K L A b T L x Figura 1: Sistema meccanico Il sistema meccanico è costituito da un cilindro di
INGEGNERIA INFORMATICA
 INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 29/06/2017 Prof. Marcello Farina SOLUZIONI ESERCIZIO 1 Si consideri il sistema descritto dalle seguenti equazioni: A. Scrivere le equazioni del sistema linearizzato
INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 29/06/2017 Prof. Marcello Farina SOLUZIONI ESERCIZIO 1 Si consideri il sistema descritto dalle seguenti equazioni: A. Scrivere le equazioni del sistema linearizzato
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/ giugno 2012
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 5 giugno 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 5 giugno 2012 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
Figura 1: Sistema dinamico.
 Teoria dei Sistemi 1-1-216 Si consideri il sistema di Figura 1. Esso è composto da tre corpi: all estremità di un pendolo inverso è incernierato un telaio nel quale alloggia una ruota giroscopica. Si indichi
Teoria dei Sistemi 1-1-216 Si consideri il sistema di Figura 1. Esso è composto da tre corpi: all estremità di un pendolo inverso è incernierato un telaio nel quale alloggia una ruota giroscopica. Si indichi
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 1/13 1 giugno 13 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si ritengono
Fondamenti di Controlli Automatici - A.A. 1/13 1 giugno 13 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si ritengono
Fondamenti di Automatica Ingegneria Industriale
 Fondamenti di Automatica Ingegneria Industriale Prof. D.M. Raimondo Prova scritta - 24 Giugno 2019 Cognome.............................. Nome.............................. Matricola..............................
Fondamenti di Automatica Ingegneria Industriale Prof. D.M. Raimondo Prova scritta - 24 Giugno 2019 Cognome.............................. Nome.............................. Matricola..............................
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 17 Febbraio 2016
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 17 Febbraio 216 Esercizio 1. [1 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 17 Febbraio 216 Esercizio 1. [1 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2013/ giugno 2014
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2013/2014 30 giugno 2014 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2013/2014 30 giugno 2014 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
Fondamenti di Automatica
 Fondamenti di Automatica (Prof. Rocco) Anno accademico 2016/2017 Appello del 23 Febbraio 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
Fondamenti di Automatica (Prof. Rocco) Anno accademico 2016/2017 Appello del 23 Febbraio 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 febbraio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello del 10 settembre 2008: testo e soluzione. y = x 2. x 1 = 1 x 2 = 1
 Appello del 10 settembre 2008: testo e soluzione. y = x 2. x 1 = 1 x 2 = 1") AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello del 1 settembre 28: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema non lineare descritto dalle seguenti equazioni: ẋ 1
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello del 1 settembre 28: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema non lineare descritto dalle seguenti equazioni: ẋ 1
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. / Ingegneria Gestionale Luglio - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali temporali
Controlli Automatici - A.A. / Ingegneria Gestionale Luglio - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali temporali
Cognome Nome Matricola Corso di Laurea
 Fondamenti di Controlli Automatici A.A. 213/14 7 gennaio 215 Quiz di Teoria Cognome Nome Matricola Corso di Laurea Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici A.A. 213/14 7 gennaio 215 Quiz di Teoria Cognome Nome Matricola Corso di Laurea Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici - Prima parte 18 Aprile 216 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti
Controlli Automatici - Prima parte 18 Aprile 216 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti
SOLUZIONE. Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015
 a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.24-5 Prof. Silvia Strada Seconda prova intermedia 2 Febbraio 25 SOLUZIONE ESERCIZIO punti: 8 su 32 Si consideri un sistema dinamico,
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.24-5 Prof. Silvia Strada Seconda prova intermedia 2 Febbraio 25 SOLUZIONE ESERCIZIO punti: 8 su 32 Si consideri un sistema dinamico,
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015
 a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015 Nome e Cognome:........................... Matricola...........................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015 Nome e Cognome:........................... Matricola...........................
Sistemi di controllo
 Cognome, Nome, N. Matr.: Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 17 settembre 2009 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome, Nome, N. Matr.: Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 17 settembre 2009 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.casy.deis.unibo.it/care ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Luca Gentili
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.casy.deis.unibo.it/care ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Luca Gentili
Regolazione e Controllo dei Sistemi Meccanici 23 Novembre 2005
 Regolazione e Controllo dei Sistemi Meccanici 23 Novembre 25 Numero di matricola A) Si consideri la risposta al gradino unitario riportata in fig. e si determini qualitativamente la funzione di trasferimento
Regolazione e Controllo dei Sistemi Meccanici 23 Novembre 25 Numero di matricola A) Si consideri la risposta al gradino unitario riportata in fig. e si determini qualitativamente la funzione di trasferimento
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 19 Luglio 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 9 Luglio 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = (s + )
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 9 Luglio 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = (s + )
Fondamenti di Automatica
 Fondamenti di Automatica 19-02-2015 Si consideri il sistema meccanico rappresentato in figura 1. Figura 1: Schema di un carrello che trasporta materiale fuso (ispirato da elaborato di L. Brasile) Il sistema
Fondamenti di Automatica 19-02-2015 Si consideri il sistema meccanico rappresentato in figura 1. Figura 1: Schema di un carrello che trasporta materiale fuso (ispirato da elaborato di L. Brasile) Il sistema
Esercizi per il corso di Fondamenti di Automatica (Mod. I) PARTE II
 PARTE II") Esercizi per il corso di Fondamenti di Automatica (Mod. I) PARTE II 20 dicembre 2018 Esercizio 1. (Stabilita ) Si consideri un sistema LTI retto dalla seguente f.d.t.: s + a s(s + b) 1. Si discuta la stabilità
Esercizi per il corso di Fondamenti di Automatica (Mod. I) PARTE II 20 dicembre 2018 Esercizio 1. (Stabilita ) Si consideri un sistema LTI retto dalla seguente f.d.t.: s + a s(s + b) 1. Si discuta la stabilità
Prova TIPO C per: ESERCIZIO 1.
 Prova TIPO C per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta multipla (v. ultime
Prova TIPO C per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta multipla (v. ultime
INGEGNERIA INFORMATICA
 INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 21/09/2016 - Soluzioni Prof Marcello Farina Anno Accademico 2015/2016 ESERCIZIO 1 Si consideri il sistema descritto dalle seguenti equazioni: A Spiegare
INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 21/09/2016 - Soluzioni Prof Marcello Farina Anno Accademico 2015/2016 ESERCIZIO 1 Si consideri il sistema descritto dalle seguenti equazioni: A Spiegare
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici A 22 Giugno 11 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici A 22 Giugno 11 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
SOLUZIONE della Prova TIPO E per:
 SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
FONDAMENTI DI AUTOMATICA (Ingegneria Biomedica) Appello del 16 febbraio 2010: testo e soluzione. y = x 1
 Appello del 16 febbraio 2010: testo e soluzione. y = x 1") FONDAMENTI DI AUTOMATICA (Ingegneria Biomedica) Appello del 16 febbraio 21: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema descritto dalle seguenti equazioni: ẋ 1 = x 2 2 + x 1 ẋ 2 =
FONDAMENTI DI AUTOMATICA (Ingegneria Biomedica) Appello del 16 febbraio 21: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema descritto dalle seguenti equazioni: ẋ 1 = x 2 2 + x 1 ẋ 2 =
Regolazione e Controllo dei Sistemi Meccanici 31 gennaio Numero di matricola = 10α 1 = 10β 1 = 10γ 1. Figure 1: Modello del sistema
 Regolazione e Controllo dei Sistemi Meccanici 31 gennaio 25 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 Figure 1: Modello del sistema Si consideri il sistema riportato in fig.1 in cui un corpo di massa m
Regolazione e Controllo dei Sistemi Meccanici 31 gennaio 25 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 Figure 1: Modello del sistema Si consideri il sistema riportato in fig.1 in cui un corpo di massa m
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 6/7 Marzo 7 - Esercizi Compito B Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t) = sin(3
Fondamenti di Controlli Automatici - A.A. 6/7 Marzo 7 - Esercizi Compito B Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t) = sin(3
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) SOLUZIONE
 SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 20 giugno 2017 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema di sorveglianza costituito da una flotta di droni di tipologia quadricottero.
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 20 giugno 2017 SOLUZIONE ESERCIZIO 1. Si vuole realizzare un sistema di sorveglianza costituito da una flotta di droni di tipologia quadricottero.
Controlli Automatici L-B - A.A. 2002/2003 Esercitazione 16/06/2003
 Controlli Automatici L-B - A.A. 22/23 Esercitazione 16/6/23 1. Si consideri lo schema a blocchi di figura. x(t) e(t) R(s) u(t) G(s) y(t) - R(s) = K τ zs + 1 τ p s + 1, G(s) = (s + 5) s(s + 5)(s + 1) Assumendo
Controlli Automatici L-B - A.A. 22/23 Esercitazione 16/6/23 1. Si consideri lo schema a blocchi di figura. x(t) e(t) R(s) u(t) G(s) y(t) - R(s) = K τ zs + 1 τ p s + 1, G(s) = (s + 5) s(s + 5)(s + 1) Assumendo
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 settembre 219 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 5 settembre 219 - Quiz Per ciascuno
Prova TIPO D per: ESERCIZIO 1.
 Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 3 luglio 19 - Quiz Per ciascuno dei
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 3 luglio 19 - Quiz Per ciascuno dei
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello dell 8 luglio 2008: testo e soluzione
 Appello dell 8 luglio 2008: testo e soluzione") AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello dell 8 luglio 8: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema con ingresso u ed uscita y descritto dalle seguenti equazioni:
AUTOMATICA I (Ingegneria Biomedica - Allievi da L a Z) Appello dell 8 luglio 8: testo e soluzione Prof. Maria Prandini 1. Si consideri il sistema con ingresso u ed uscita y descritto dalle seguenti equazioni:
Fondamenti di Automatica
 Fondamenti di Automatica Corso di Laurea in Ingegneria Gestionale Prof. Silvia Strada Anno accademico 2018/2019 Appello del 15 Gennaio 2019 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo
Fondamenti di Automatica Corso di Laurea in Ingegneria Gestionale Prof. Silvia Strada Anno accademico 2018/2019 Appello del 15 Gennaio 2019 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo
Regolazione e Controllo dei Sistemi Meccanici 13 Gennaio 2005
 Regolazione e Controllo dei Sistemi Meccanici 13 Gennaio 25 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 = 1δ 1 Si consideri il sistema idraulico costituito da due serbatoi accoppiati rappresentato in fig.1.
Regolazione e Controllo dei Sistemi Meccanici 13 Gennaio 25 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 = 1δ 1 Si consideri il sistema idraulico costituito da due serbatoi accoppiati rappresentato in fig.1.
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 8 settembre 2017 SOLUZIONE ESERCIZIO 1. Si consideri il seguente circuito elettrico passivo: Applicando le leggi di Kirchhoff
Controlli Automatici
 Compito del 23 marzo 24 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte corrette, e si considerano superati quando
Compito del 23 marzo 24 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte corrette, e si considerano superati quando
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 18 Settembre 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 8 Settembre 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo e causale descritto dalla seguente equazione differenziale:
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 8 Settembre 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo e causale descritto dalla seguente equazione differenziale:
SOLUZIONE della Prova TIPO E per:
 SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 CFU): 6 degli 8 esercizi numerici + 4 delle 5 domande a risposta multipla (v. ultime due pagine) NOTA: nell effettiva prova d esame
SOLUZIONE della Prova TIPO E per: Esame di FONDAMENTI DI AUTOMATICA (9 CFU): 6 degli 8 esercizi numerici + 4 delle 5 domande a risposta multipla (v. ultime due pagine) NOTA: nell effettiva prova d esame
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/ gennaio 2013
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 14 gennaio 2013 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2011/2012 14 gennaio 2013 nome e cognome: numero di matricola: prova d esame da CFU : 6 CFU 9 CFU Note: Scrivere le risposte negli spazi appositi. Non consegnare
Prof. SILVIA STRADA Cognomi LF - PO
 Politecnico di Milano Prof. SILVIA STRADA Cognomi LF - PO A.A. 2015/16 Appello di Fondamenti di Automatica (CL Ing. Gestionale) 1 Marzo 2016 Tempo a disposizione: 2.00 h. Nome e Cognome:... Matricola...
Politecnico di Milano Prof. SILVIA STRADA Cognomi LF - PO A.A. 2015/16 Appello di Fondamenti di Automatica (CL Ing. Gestionale) 1 Marzo 2016 Tempo a disposizione: 2.00 h. Nome e Cognome:... Matricola...
Fondamenti di automatica
 Fondamenti di automatica (Prof. Rocco) Anno accademico 2015/2016 Appello del 9 Febbraio 2017 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa
Fondamenti di automatica (Prof. Rocco) Anno accademico 2015/2016 Appello del 9 Febbraio 2017 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 212/13 9 novembre 212 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Fondamenti di Controlli Automatici - A.A. 212/13 9 novembre 212 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
COMPITO DI CONTROLLI AUTOMATICI 26 Settembre 2008
 COMPITO DI CONTROLLI AUTOMATICI 26 Settembre 28 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a d2 y(t) 2 con a parametro reale.
COMPITO DI CONTROLLI AUTOMATICI 26 Settembre 28 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a d2 y(t) 2 con a parametro reale.
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 8 giugno 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 8 giugno 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI SOLUZIONE
 / CONTROLLI AUTOMATICI SOLUZIONE") Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (6 CFU) / CONTROLLI AUTOMATICI Prova scritta 13 luglio 2017 SOLUZIONE ESERCIZIO 1. I moderni robot industriali con funzionalità collaborative (i.e. co-esistenza e interazione
Esame di FONDAMENTI DI AUTOMATICA (9 CFU)
") Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 20 giugno 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema di sorveglianza costituito da una flotta di droni di tipologia
Esame di FONDAMENTI DI AUTOMATICA (9 CFU) Prova scritta 20 giugno 2017 COGNOME e NOME: MATRICOLA: ESERCIZIO 1. Si vuole realizzare un sistema di sorveglianza costituito da una flotta di droni di tipologia
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Federica
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Federica
Cognome Nome: Matricola: Corso di Laurea: Fondamenti di Controlli Automatici - A.A. 2011/12 20 settembre Domande Teoriche
 Fondamenti di Controlli Automatici - A.A. / settembre - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. / settembre - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Esame di Regolazione e Controllo
 Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Cognome Nome Matricola Corso
 Fondamenti di Controlli Automatici - A.A. 23/4 23 luglio 24 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Fondamenti di Controlli Automatici - A.A. 23/4 23 luglio 24 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Fondamenti di automatica
 Fondamenti di automatica (Prof. Bascetta) Anno accademico 2015/2016 Appello del 7 Settembre 2016 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa
Fondamenti di automatica (Prof. Bascetta) Anno accademico 2015/2016 Appello del 7 Settembre 2016 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8 pagine (compresa
FONDAMENTI DI AUTOMATICA I - Ingegneria Elettronica Appello del 15 luglio 2015
 FONDAMENTI DI AUTOMATICA I - Ingegneria Elettronica Appello del 15 luglio 2015 Prof.ssa Mara Tanelli 1. Si consideri il sistema dinamico non lineare con ingresso u ed uscita y descritto dalle seguenti
FONDAMENTI DI AUTOMATICA I - Ingegneria Elettronica Appello del 15 luglio 2015 Prof.ssa Mara Tanelli 1. Si consideri il sistema dinamico non lineare con ingresso u ed uscita y descritto dalle seguenti
SOLUZIONE della Prova TIPO F per:
 SOLUZIONE della Prova TIPO F per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
SOLUZIONE della Prova TIPO F per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) + domande a risposta
Esame di Controlli Automatici 4 Febbraio 2016
 Esame di Controlli Automatici 4 Febbraio 26. (7) Si consideri il seguente sistema non lineare ẋ αx 3 2( + x 2 + x 2 2) ẋ 2 βx 3 ( + x 2 + x 2 2) () e si studi la stabilità dell equilibrio nell origine
Esame di Controlli Automatici 4 Febbraio 26. (7) Si consideri il seguente sistema non lineare ẋ αx 3 2( + x 2 + x 2 2) ẋ 2 βx 3 ( + x 2 + x 2 2) () e si studi la stabilità dell equilibrio nell origine
5. Per ω = 1/τ il diagramma reale di Bode delle ampiezze della funzione G(jω) =
 =") Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 06/09/2016 SOLUZIONI. Prof. Marcello Farina
 INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 6/9/26 SOLUZIONI Prof. Marcello Farina f(x,) ESERCIZIO Si consideri il sistema descritto dalle seguenti equazioni: A. Scrivere l equazione del sistema linearizzato
INGEGNERIA INFORMATICA FONDAMENTI DI AUTOMATICA 6/9/26 SOLUZIONI Prof. Marcello Farina f(x,) ESERCIZIO Si consideri il sistema descritto dalle seguenti equazioni: A. Scrivere l equazione del sistema linearizzato
Nome: Nr. Mat. Firma: Info. Elet. Telec. Altro.
 Controlli Automatici A Compito Completo Dicembre 7 - Esercizi Compito A Nr. a = Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. Negli esercizi che seguono, si sostituisca ad a il valore assegnato
Controlli Automatici A Compito Completo Dicembre 7 - Esercizi Compito A Nr. a = Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. Negli esercizi che seguono, si sostituisca ad a il valore assegnato
Sesto test di autovalutazione di CONTROLLI AUTOMATICI A.A. 2015/2016
 Sesto test di autovalutazione di CONTROLLI AUTOMATICI A.A. 25/26 Data: 8 Novembre 25. Con riferimento alle seguenti funzioni di trasferimento (a) W (s) = (b) W (s) = s + 9 (s + )(s + ) ; s + (s + 2)(s
Sesto test di autovalutazione di CONTROLLI AUTOMATICI A.A. 25/26 Data: 8 Novembre 25. Con riferimento alle seguenti funzioni di trasferimento (a) W (s) = (b) W (s) = s + 9 (s + )(s + ) ; s + (s + 2)(s
COMPITO DI CONTROLLI AUTOMATICI 7 Gennaio 2003
 COMPITO DI CONTROLLI AUTOMATICI 7 Gennaio 003 Esercizio. Si consideri il sistema a tempo discreto ( ) y(t) + a y(t ) + a y(t ) = u(t) u(t ), t Z +, dove a è un parametro reale. i) Calcolare, al variare
COMPITO DI CONTROLLI AUTOMATICI 7 Gennaio 003 Esercizio. Si consideri il sistema a tempo discreto ( ) y(t) + a y(t ) + a y(t ) = u(t) u(t ), t Z +, dove a è un parametro reale. i) Calcolare, al variare
Fondamenti di Automatica
 Fondamenti di Automatica (Prof. Rocco) Anno accademico 2017/2018 Appello del 13 Luglio 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
Fondamenti di Automatica (Prof. Rocco) Anno accademico 2017/2018 Appello del 13 Luglio 2018 Nome: Matricola: Firma:... Avvertenze: Il presente fascicolo si compone di 10 pagine (compresa la copertina).
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 1 Febbraio 2016
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 1 Febbraio 16 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 1 Febbraio 16 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 21 Febbraio 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 21 Febbraio 212 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 21 Febbraio 212 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1
Fondamenti di automatica
 Fondamenti di automatica (Prof. Rocco) Prima prova scritta intermedia Anno accademico 015/016 3 Maggio 016 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8
Fondamenti di automatica (Prof. Rocco) Prima prova scritta intermedia Anno accademico 015/016 3 Maggio 016 Cognome:... Nome:... Matricola:... Firma:... Avvertenze: Il presente fascicolo si compone di 8
= 2000) Controlli automatici LB 16/1/ Il regolatore
 Controlli automatici LB 16/1/ Il regolatore") Quiz A 1. La compensazione del segnale di riferimento in anello aperto: viene effettuata filtrando opportunamente l uscita misurata viene effettuata progettando un filtro che cancella totalmente la dinamica
Quiz A 1. La compensazione del segnale di riferimento in anello aperto: viene effettuata filtrando opportunamente l uscita misurata viene effettuata progettando un filtro che cancella totalmente la dinamica
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ gennaio 2004
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/2004 4 gennaio 2004 nome e cognome: numero di matricola: Note: Scrivere le risposte negli spazi appositi. Non consegnare fogli aggiuntivi. La chiarezza
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/2004 4 gennaio 2004 nome e cognome: numero di matricola: Note: Scrivere le risposte negli spazi appositi. Non consegnare fogli aggiuntivi. La chiarezza
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 2009/10 6 Settembre 2010 - Esercizi Compito Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t):
Fondamenti di Controlli Automatici - A.A. 2009/10 6 Settembre 2010 - Esercizi Compito Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t):
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 29 - Quiz Per ciascuno dei
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 9 gennaio 29 - Quiz Per ciascuno dei
Scrivere il numero della risposta sopra alla corrispondente domanda. (voti: 2,0,-1, min=14 sulle prime 10) , C = [3 2 2], D =
![Scrivere il numero della risposta sopra alla corrispondente domanda. (voti: 2,0,-1, min=14 sulle prime 10) , C = [3 2 2], D =](/thumbs/67/56407198.jpg "Scrivere il numero della risposta sopra alla corrispondente domanda. (voti: 2,0,-1, min=14 sulle prime 10) , C = [3 2 2], D =") n. 101 cognome nome corso di laurea Analisi e Simulazione di Sistemi Dinamici 18/11/2003 Risposte Domande 1 2 3 4 5 6 7 8 9 10 N. matricola Scrivere il numero della risposta sopra alla corrispondente domanda.
n. 101 cognome nome corso di laurea Analisi e Simulazione di Sistemi Dinamici 18/11/2003 Risposte Domande 1 2 3 4 5 6 7 8 9 10 N. matricola Scrivere il numero della risposta sopra alla corrispondente domanda.
Esame di Controlli Automatici - 30 Giugno 2009
 Esame di Controlli Automatici - 3 Giugno 29 Esercizio 1 Si consideri il processo di produzione di tubo in vetro riportato in figura 1, la cui descrizione è fornita nel testo d esame di Regolazione e Controllo
Esame di Controlli Automatici - 3 Giugno 29 Esercizio 1 Si consideri il processo di produzione di tubo in vetro riportato in figura 1, la cui descrizione è fornita nel testo d esame di Regolazione e Controllo
COMPITO DI CONTROLLI AUTOMATICI 25 Giugno 2007
 COMPITO DI CONTROLLI AUTOMATICI 25 Giugno 27 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a 2d2 y(t) 2 con a parametro reale.
COMPITO DI CONTROLLI AUTOMATICI 25 Giugno 27 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a 2d2 y(t) 2 con a parametro reale.