Laboratorio del corso di Progettazione dei Sistemi di Controllo. Prof. Roberto Oboe
|
|
|
- Geraldo Lorenzi
- 4 anni fa
- Visualizzazioni
Transcript
1 Laboratorio del corso di Progettazione dei Sistemi di Controllo Prof. Roberto Oboe
2 Organizzazione Faremo 6 sessioni di laboratorio. Il 4/6 rilevazione sulla qualità della didattica. 10 gruppi da 3 studenti ciascuno La prova finale consisterà in un orale, in cui si discuterà anche il contenuto di una relazione sull attività di laboratorio. La relazione sarà di gruppo, ma non l orale La relazione dovrà descrivere gli apparati (sommariamente), gli esperimenti effettuati, le tecniche utilizzate e riportare i dati sperimentali. Non dovrà essere più lunga di 10 pagine, formato doppia colonna (vedi Zigliotto) Dovrà essere presentata al docente almeno 3 giorni prima dell appello.
3 Strumenti Useremo: PC con scheda di acquisizione (Sensoray 626) Motore CC con pilotaggio in corrente e lettura posizione con encoder. Carichi meccanici puramente inerziali e con elasticità Matlab, Simulink e Real Time Windows Target


4 Strumenti Motore con encoder Morsettiera Cavo Scheda 626 PC con Simulink Amplificatore di corrente
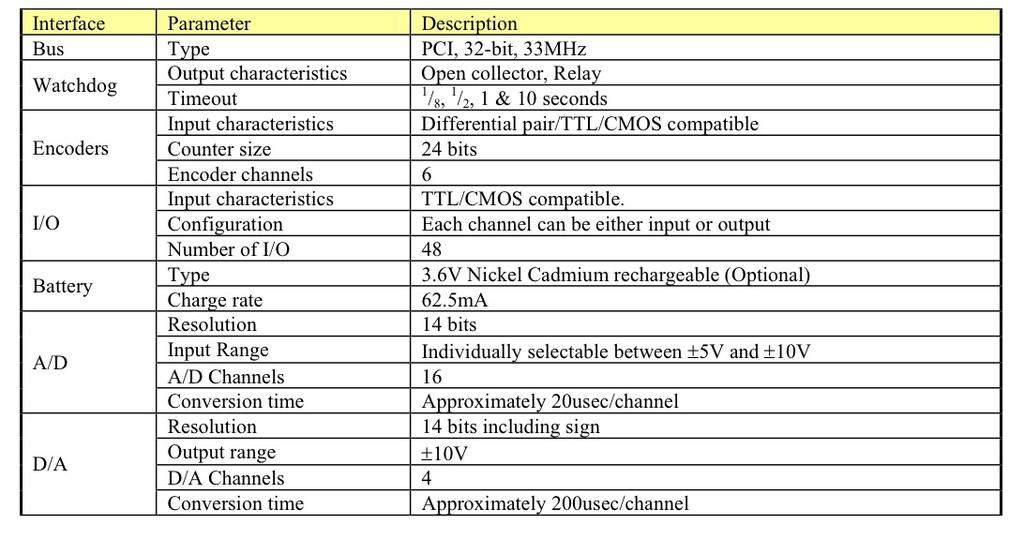
5 Scheda di acquisizione La scheda consente di interfacciare il PC con il mondo esterno: Ingressi analogici (16x, 14 bit) Uscite analogiche (4x, 13 bit) I/O digitali (48 totali) Watchdog timer Ingressi encoder (6x, conteggio quadruplicato, con U/D e zero)
6 Scheda di acquisizione
7 Scheda di acquisizione La scheda viene connessa al sistema da controllare attraverso un flat cable e una morsettiera, non accessibile agli studenti. Il comando alle uscite e la lettura degli ingressi avviene attraverso degli speciali blocchetti di Simulink (li vedremo dopo)
8 Motore c.c. con encoder Il motore utilizzato presenta le seguenti caratteristiche: Costante di coppia: 0.071Nm/A Inerzia rotorica: Kg m^2 Resistenza avvolgimenti: 3.85 ohm Coppia di attrito statico: Nm Tensione max: 60V Coeff. d attrito viscoso: 1.4 e-5 Nm/s
9 Motore c.c. con encoder Sul motore è montato un encoder incrementale: 500 impulsi/giro Il conteggio verrà moltiplicato per 4 Ha la tacca di zero (che non useremo ) Se voglio la misura dello spostamento angolare in gradi, devo moltiplicare il conteggio per: 360/2000
10 Amplificatore di corrente L amplificatore è in grado di comandare il motore con una corrente proporzionale al riferimento in tensione: Ki=2 A/V Con i nostri alimentatori: Max tensione = 30V Max Corrente = 6A Bisogna limitare il riferimento a +/- 3V!! La corrente max si ha fino a circa 100 rad/s (perché??)
11 Pendolo di Furuta Sul motore è montato un braccio che sostiene un pendolo inverso I segni degli angoli sono diversi dalmodello visto a lezione Angoli positivi ORARI Ciò è dovuto a come sono stati montati gli encoder Valgono le note fornite a lezione dal Dott. Antonello

12 Pendolo di Furuta J2 ϑ 1 ϑ 2 Nota: Ad un comando di coppia positivo, corrisponde un movimento positivo J1 Encoder pendolo Encoder motore
13 Carico meccanico con elasticità % Dai lucidi del Dott. Antonello J1 = ; J2 = 4.15e 5; l1 = 0.16; l2 = 0.15/2; m2 = ; g = 9.81; gam = J1*J2 + J1*m2*l2^2 + J2*m2*l1^2; a32 = m2^2*l1*l2^2*g / gam; a42 = m2*l2*g*(j1 + m2*l1^2) / gam; b31 = (J2 + m2*l2^2) / gam; b32 = m2*l1*l2 / gam; b41 = m2*l1*l2 A=[ a a42 0 0]; B= [0 0 b31 b41]; Q = diag([.1, 1,.1,.1]); r = 1; [Kinf, Pinf, lam] = lqr(a, B, Q, r);
14 Simulink E un pacchetto SW che consente la simulazione di sistemi dinamici, rappresentati graficamente mediante connessione di blocchi elementari. Attraverso l uso di un particolare toolbox (Real Time Windows Target) è possibile interfacciarsi col mondo esterno e controllare dispositivi in tempo reale
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms
 Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
Sviluppo di sistemi di controllo su piattaforma LEGO Mindstorms Candidati: Iacopo Finocchi Niccolò Monni Relatore: Ing. Michele Basso Correlatori: Dott. Franco Quercioli Dott. Massimo Vassalli Contesto
1.1 Modellizzazione di un sistema massa molla smorzatore
 11 Modellizzazione di un sistema massa molla smorzatore Sia dato il sistema in figura (11), composto da una massa m connessa ad un elemento elastico di costante k ed uno smorzatore di costante d Alla massa
11 Modellizzazione di un sistema massa molla smorzatore Sia dato il sistema in figura (11), composto da una massa m connessa ad un elemento elastico di costante k ed uno smorzatore di costante d Alla massa
LABORATORIO DI ROBOTICA SCORBOT-ER. Appunti per laboratorio didattico
 LABORATORIO DI ROBOTICA SCORBOT-ER Appunti per laboratorio didattico Claudio Mattoccia Rev. Maggio 1996 Lo SCORBOT-ER è un robot a 5 gradi di libertà fornito di una pinza motorizzata come strumento di
LABORATORIO DI ROBOTICA SCORBOT-ER Appunti per laboratorio didattico Claudio Mattoccia Rev. Maggio 1996 Lo SCORBOT-ER è un robot a 5 gradi di libertà fornito di una pinza motorizzata come strumento di
Figura 1: Plotter cartesiano
 Modellazione, Simulazione e Controllo di un Plotter Cartesiano - Introduzione Sistemi Meccatronici II - a.a. 2017-2018 - Universita degli Studi di Bergamo Descrizione del progetto Obiettivo del progetto
Modellazione, Simulazione e Controllo di un Plotter Cartesiano - Introduzione Sistemi Meccatronici II - a.a. 2017-2018 - Universita degli Studi di Bergamo Descrizione del progetto Obiettivo del progetto
Cablaggio della barra Previsione teorica del comportamento della barra Misure del segnale sotto flessione e sotto trazione Analisi dei risultati
 Laboratorio di misure Applicazioni del ponte di Wheatstone Barra di torsione Scopo Compiti Prerequisiti Riferimenti Utilizzare il ponte di Wheatstone per misurare la torsione di una barra Verificare l'insensibilità
Laboratorio di misure Applicazioni del ponte di Wheatstone Barra di torsione Scopo Compiti Prerequisiti Riferimenti Utilizzare il ponte di Wheatstone per misurare la torsione di una barra Verificare l'insensibilità
FONDAMENTI DI AUTOMATICA Corso di laurea in Ingegneria Matematica Prof. C. Piccardi Appello del 7/9/2016
 FONDAMENTI DI AUTOMATICA Corso di laurea in Ingegneria Matematica Prof. C. Piccardi Appello del 7/9/2016 COGNOME: NOME: MATRICOLA o CODICE PERSONA: FIRMA: Visto del docente: Voto totale 6 6 6 6 3 3 2 32
FONDAMENTI DI AUTOMATICA Corso di laurea in Ingegneria Matematica Prof. C. Piccardi Appello del 7/9/2016 COGNOME: NOME: MATRICOLA o CODICE PERSONA: FIRMA: Visto del docente: Voto totale 6 6 6 6 3 3 2 32
Esame di Regolazione e Controllo
 Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
15000 A 3000 rpm TIPO - Type
 SERVOMOTORI C.C. SERIE Series ESA DATI MOTORE - MOTOR RATINGS 2S COPPIA - Nm 0.32 TIPO DI AVVOLGIMENTO Type of winding 1 2 VELOCITA NOMINALE - Rated speed n [ rpm ] 3000 3000 COPPIA ROTORE BLOCCATO - Continuos
SERVOMOTORI C.C. SERIE Series ESA DATI MOTORE - MOTOR RATINGS 2S COPPIA - Nm 0.32 TIPO DI AVVOLGIMENTO Type of winding 1 2 VELOCITA NOMINALE - Rated speed n [ rpm ] 3000 3000 COPPIA ROTORE BLOCCATO - Continuos
A.S. 2018/19 PIANO DI LAVORO SVOLTO CLASSE 3Ai
 A.S. 2018/19 PIANO DI LAVORO SVOLTO CLASSE 3Ai Docenti Evangelista D., Marino B. Disciplina TELECOMUNICAZIONI (per INFORMATICA) Competenze disciplinari di riferimento Il percorso formativo si prefigge
A.S. 2018/19 PIANO DI LAVORO SVOLTO CLASSE 3Ai Docenti Evangelista D., Marino B. Disciplina TELECOMUNICAZIONI (per INFORMATICA) Competenze disciplinari di riferimento Il percorso formativo si prefigge
LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale
 LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093024 email: crossi@deis.unibo.it Procedura di sintesi Guida alla sintesi del controllo
LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093024 email: crossi@deis.unibo.it Procedura di sintesi Guida alla sintesi del controllo
Controllo di un Braccio Robotico (Pendolo Reale)
") Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione rotativa.
 EasyROT package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione rotativa. Pacchetto composto da : o Attuatore rotante Rotac o servo attuatore Servorotac
EasyROT package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione rotativa. Pacchetto composto da : o Attuatore rotante Rotac o servo attuatore Servorotac
01EKU - Tecnologia dei sistemi di controllo automatici Verres
 01EKU - Tecnologia dei sistemi di controllo automatici Verres Esercitazioni di Laboratorio hardware A.A. 2010/11 Premessa: descrizione del sistema da controllare e relative caratteristiche nominali Schema
01EKU - Tecnologia dei sistemi di controllo automatici Verres Esercitazioni di Laboratorio hardware A.A. 2010/11 Premessa: descrizione del sistema da controllare e relative caratteristiche nominali Schema
Componenti per la robotica: Sistemi di misura e Sensori propriocettivi
 Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
Corso di Robotica 1 Componenti per la robotica: Sistemi di misura e Sensori propriocettivi Prof. Alessandro De Luca Robotica 1 1 Caratteristiche dei sistemi di misura - 1 accuratezza (accuracy) conformità
FM574. Azionamento vettoriale PMSM e ACIM. Specifiche tecniche
 Codice progetto/prodotto: Descrizione: FM Azionamento vettoriale PMSM e ACIM Tipo di documento: Specifiche tecniche Versioni di riferimento: Hardware FM C FRANCESCHI MARINA S. ELETTRONICA INDUSTRIALE Via
Codice progetto/prodotto: Descrizione: FM Azionamento vettoriale PMSM e ACIM Tipo di documento: Specifiche tecniche Versioni di riferimento: Hardware FM C FRANCESCHI MARINA S. ELETTRONICA INDUSTRIALE Via
I trasduttori Classificazione dei trasduttori
 I trasduttori 1 Classificazione dei trasduttori Segnale Politecnico di Torino 1 Classificazione per segnale Digitale registrazione con incrementi finiti elevata precisione grazie alla misura direttamente
I trasduttori 1 Classificazione dei trasduttori Segnale Politecnico di Torino 1 Classificazione per segnale Digitale registrazione con incrementi finiti elevata precisione grazie alla misura direttamente
Lez. 9 Moto armonico
 Lez. 9 Moto armonico Prof. 1 Dott., PhD Dipartimento Scienze Fisiche Università di Napoli Federico II Compl. Univ. Monte S.Angelo Via Cintia, I-80126, Napoli mettivier@na.infn.it +39-081-676137 2 1 Un
Lez. 9 Moto armonico Prof. 1 Dott., PhD Dipartimento Scienze Fisiche Università di Napoli Federico II Compl. Univ. Monte S.Angelo Via Cintia, I-80126, Napoli mettivier@na.infn.it +39-081-676137 2 1 Un
U N I V E R S I T A D E G L I S T U D I D E L L A B A S I L I C A T A Esame di MECCANICA APPLICATA ALLE MACCHINE 13/03/2013 RISPOSTE
 U N I V E R S I T A D E G L I S T U D I D E L L A B A S I L I C A T A Esame di MECCANICA APPLICATA ALLE MACCHINE 13/03/013 Cognome: Nome: matr.: MAM 6 CFU MAM 9 CFU RISPOSTE Quesito 1 Quesito Quesito 3
U N I V E R S I T A D E G L I S T U D I D E L L A B A S I L I C A T A Esame di MECCANICA APPLICATA ALLE MACCHINE 13/03/013 Cognome: Nome: matr.: MAM 6 CFU MAM 9 CFU RISPOSTE Quesito 1 Quesito Quesito 3
Laboratorio di Controlli Lab n.1: Controllo di un motore elettrico tramite PID
 Laboratorio di Controlli Lab n.1: Controllo di un motore elettrico tramite PID Luca Schenato Email: schenato@dei.unipd.it 30 Marzo 015 1 Scopo L obiettivo di questo laboratorio è di procedere alla progettazione
Laboratorio di Controlli Lab n.1: Controllo di un motore elettrico tramite PID Luca Schenato Email: schenato@dei.unipd.it 30 Marzo 015 1 Scopo L obiettivo di questo laboratorio è di procedere alla progettazione
Descrivere principio
 Docente: LASEN SERGIO Classe: 5MAT Materia: Tecnologie Elettrico Elettroniche, Automazione e Applicazioni MODULO 1 - MACCHINE ELETTRICHE ASINCRONE sistemi trifase. Descrivere il principio di un m.a.t.
Docente: LASEN SERGIO Classe: 5MAT Materia: Tecnologie Elettrico Elettroniche, Automazione e Applicazioni MODULO 1 - MACCHINE ELETTRICHE ASINCRONE sistemi trifase. Descrivere il principio di un m.a.t.
Modelli di sistemi elementari. (Fondamenti di Automatica G. Ferrari Trecate)
") Modelli di sistemi elementari (Fondamenti di Automatica G. Ferrari Trecate) Circuiti elettrici Resistore R i resistenza corrente v tensione v = Ri( Induttore L i induttanza corrente v tensione L i! = v(
Modelli di sistemi elementari (Fondamenti di Automatica G. Ferrari Trecate) Circuiti elettrici Resistore R i resistenza corrente v tensione v = Ri( Induttore L i induttanza corrente v tensione L i! = v(
UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO. in ambiente Matlab/Simulink. dott. G. Fenu Tecnologie per l automazione
 UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO in ambiente Matlab/Simulink dott. G. Fenu Tecnologie per l automazione Argomenti Presentazione del laboratorio e del sistema da controllare
UTILIZZO DI UNA SCHEDA DSP PER LO SVILUPPO DI SISTEMI DI CONTROLLO in ambiente Matlab/Simulink dott. G. Fenu Tecnologie per l automazione Argomenti Presentazione del laboratorio e del sistema da controllare
SE22 Small Encoder. Manuale istruzioni. Encoder ottico incrementale Alimentazione 8 13V Uscita push-pull
 SE22 Small Encoder Manuale istruzioni Encoder ottico incrementale Alimentazione 8 13V Uscita push-pull Descrizione SE22 è un encoder ottico incrementale ad albero cavo con ottime prestazioni, costo contenuto,
SE22 Small Encoder Manuale istruzioni Encoder ottico incrementale Alimentazione 8 13V Uscita push-pull Descrizione SE22 è un encoder ottico incrementale ad albero cavo con ottime prestazioni, costo contenuto,
SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato
 SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato Automazione industriale 1- Disegnare lo schema di un semplice alimentatore di tensione continua da 24 volt mettendo in evidenza
SISTEMI E AUTOMAZIONE: esempi di domande e esercizi per III prova esame di stato Automazione industriale 1- Disegnare lo schema di un semplice alimentatore di tensione continua da 24 volt mettendo in evidenza
Laboratorio di Sistemi e Automazione (A020-C320) esperienza competenze Competenze trasversali
 esperienza competenze Competenze trasversali") DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
DISCIPLINA: Sistemi e Automazione (A020-C320) QUADRO ORARIO Articolazione Meccanica e Meccatronica Secondo Biennio terzo anno: 4 (2) quarto anno: 3 (2) Quinto anno: 3 (2) Articolazione Energia Secondo
Parte 4 Modellazione a Parametri Concentrati
 Meccanica delle Vibrazioni II modulo 4 1 Meccanica delle Vibrazioni II modulo 4 2 Meccanica delle Vibrazioni II modulo 4 3 Meccanica delle Vibrazioni II modulo 4 4 Meccanica delle Vibrazioni II modulo
Meccanica delle Vibrazioni II modulo 4 1 Meccanica delle Vibrazioni II modulo 4 2 Meccanica delle Vibrazioni II modulo 4 3 Meccanica delle Vibrazioni II modulo 4 4 Meccanica delle Vibrazioni II modulo
Introduzione a Simulink
 Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 (CASY) Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi 1 Cosa è Simulink Simulink: un ambiente grafico per la simulazione
Traslazioni. Debora Botturi ALTAIR. Debora Botturi. Laboratorio di Sistemi e Segnali
 Traslazioni ALTAIR http://metropolis.sci.univr.it Argomenti Velocitá ed accelerazione di una massa che trasla Esempio: massa che trasla con condizioni iniziali date Argomenti Argomenti Velocitá ed accelerazione
Traslazioni ALTAIR http://metropolis.sci.univr.it Argomenti Velocitá ed accelerazione di una massa che trasla Esempio: massa che trasla con condizioni iniziali date Argomenti Argomenti Velocitá ed accelerazione
Prova Scritta del 24/02/2012
 Prova Scritta del 4/0/01 Esame di FISICA (Compito A) Corso di Studi: Informatica Prof. A. Sgarlata Problema n.1 La bacchetta omogenea in figura, lunga L =.0m econmassam =1.5kg puó ruotare intorno a un
Prova Scritta del 4/0/01 Esame di FISICA (Compito A) Corso di Studi: Informatica Prof. A. Sgarlata Problema n.1 La bacchetta omogenea in figura, lunga L =.0m econmassam =1.5kg puó ruotare intorno a un
Attuatori. Gli attuatori costituiscono gli elementi che controllano e permettono il movimento delle parti
 Attuatori Gli attuatori costituiscono gli elementi che controllano e permettono il movimento delle parti meccaniche di una macchina automatica. Sono una componente della parte operativa di una macchina
Attuatori Gli attuatori costituiscono gli elementi che controllano e permettono il movimento delle parti meccaniche di una macchina automatica. Sono una componente della parte operativa di una macchina
Lezione 09: Sistemi di corpi
 Esercizio 1 [Urti elastici] Lezione 09: Sistemi di corpi Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro una biglia P 2 inizialmente ferma di massa m 1 =
Esercizio 1 [Urti elastici] Lezione 09: Sistemi di corpi Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro una biglia P 2 inizialmente ferma di massa m 1 =
I n s e g n a m e n t o d i BIOMECCANICA
 A A 2014-2015 U N I V E R S I T A D E G L I S T U D I DI R O M A T O R V E R G AT A F A C O LT A DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
A A 2014-2015 U N I V E R S I T A D E G L I S T U D I DI R O M A T O R V E R G AT A F A C O LT A DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
PRESENTAZIONE DEL CORSO
 PRESENTAZIONE DEL CORSO Davide Giglio E-mail: Davide.Giglio@unige.it CORSO DI LAUREA IN INGEGNERIA INFORMATICA Obiettivo del Corso Lo studente al termine del corso sarà in grado di: modellare come sistemi
PRESENTAZIONE DEL CORSO Davide Giglio E-mail: Davide.Giglio@unige.it CORSO DI LAUREA IN INGEGNERIA INFORMATICA Obiettivo del Corso Lo studente al termine del corso sarà in grado di: modellare come sistemi
I n s e g n a m e n t o d i BIOMECCANICA
 A A 2 0 1 3-2014 U N I V E R S I TA D E G L I S T U D I DI R O M A T O R V E R G ATA F A C O LTA DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
A A 2 0 1 3-2014 U N I V E R S I TA D E G L I S T U D I DI R O M A T O R V E R G ATA F A C O LTA DI M E D I C I N A E C H I R U R G I A L A U R E A T R I E N N A L E I N S C I E N Z E M O T O R I E I n
Controlli automatici
 Controlli automatici Informazioni sul corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Informazioni generali (1/2) Corso di
Controlli automatici Informazioni sul corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Informazioni generali (1/2) Corso di
Meccanica 17 Aprile 2019 Problema 1 (1 punto) Soluzione , F r Problema 2 (2 punti) Soluzione
 Soluzione , F r Problema 2 (2 punti) Soluzione") Meccanica 17 Aprile 019 Problema 1 (1 punto) Una massa puntiforme di valore m= 1.5 kg, posta nell origine, viene sottoposta all azione di una forza F= 3i + j N, dove i e j sono i versori degli assi del
Meccanica 17 Aprile 019 Problema 1 (1 punto) Una massa puntiforme di valore m= 1.5 kg, posta nell origine, viene sottoposta all azione di una forza F= 3i + j N, dove i e j sono i versori degli assi del
Lab 1: Controllo di un motore elettrico tramite PID (10+1 punti)
") Lab 1: Controllo di un motore elettrico tramite PID (101 punti) Luca Schenato Email: schenato@dei.unipd.it 8 Gennaio 006 1 Scopo L obiettivo di questo laboratorio è di procedere alla progettazione di un
Lab 1: Controllo di un motore elettrico tramite PID (101 punti) Luca Schenato Email: schenato@dei.unipd.it 8 Gennaio 006 1 Scopo L obiettivo di questo laboratorio è di procedere alla progettazione di un
Robot IMI e sistema di controllo industriale basato su OpenDSP. Tutorial
 /12/2002 Robot IMI Tutorial Robot IMI e sistema di controllo industriale basato su OpenDSP Tutorial Nicola SMALDONE /12/2002 Robot IMI Tutorial Il manipolatore planare IMI Comando e resolver Fine corsa
/12/2002 Robot IMI Tutorial Robot IMI e sistema di controllo industriale basato su OpenDSP Tutorial Nicola SMALDONE /12/2002 Robot IMI Tutorial Il manipolatore planare IMI Comando e resolver Fine corsa
Invert. a PWM. abc. Figura 1: Schema azionamento
 ESERCIZIO Si consideri il controllo di coppia di figura che fa uso di un azionamento a corrente alternata con un motore sincrono a magneti permanenti con rotore isotropo avente i seguenti dati di targa:
ESERCIZIO Si consideri il controllo di coppia di figura che fa uso di un azionamento a corrente alternata con un motore sincrono a magneti permanenti con rotore isotropo avente i seguenti dati di targa:
I S T I T U T O T E C N I C O I N D U S T R I A L E S T A T A L E V E R O N A
 I S T I T U T O T E C N I C O I N D U S T R I A L E S T A T A L E G U G L I E L M O M A R C O N I V E R O N A PROGRAMMA PREVENTIVO A.S. 2015/2016 CLASSE 4Ac MATERIA: Elettrotecnica, elettronica e automazione
I S T I T U T O T E C N I C O I N D U S T R I A L E S T A T A L E G U G L I E L M O M A R C O N I V E R O N A PROGRAMMA PREVENTIVO A.S. 2015/2016 CLASSE 4Ac MATERIA: Elettrotecnica, elettronica e automazione
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
PROVE SU UNA MACCHINA ASINCRONA TRIFASE
 LABORATORIO DI MACCHINE ELETTRICHE PROVE SU UNA MACCHINA ASINCRONA TRIFASE PROVA A CARICO: METODO DEL DINAMOMETRO scopo della prova; metodo del dinamometro; schema del circuito di misura; strumenti utilizzati;
LABORATORIO DI MACCHINE ELETTRICHE PROVE SU UNA MACCHINA ASINCRONA TRIFASE PROVA A CARICO: METODO DEL DINAMOMETRO scopo della prova; metodo del dinamometro; schema del circuito di misura; strumenti utilizzati;
Meccanica Applicata alle Macchine
 Meccanica Applicata alle Macchine 06-11-013 TEMA A 1. Un cilindro ed una sfera omogenei di uguale massa m ed uguale raggio r sono collegati tra loro da un telaio di massa trascurabile mediante coppie rotoidali
Meccanica Applicata alle Macchine 06-11-013 TEMA A 1. Un cilindro ed una sfera omogenei di uguale massa m ed uguale raggio r sono collegati tra loro da un telaio di massa trascurabile mediante coppie rotoidali
MACCHINE ELETTRICHE-OPENLAB-0.2 kw
 VERSIONE AUTOMATICA IL SISTEMA DL 10280 È COSTITUITO DA UN KIT DI COMPONENTI ADATTO PER ASSEMBLARE LE MACCHINE ELETTRICHE ROTANTI, SIA PER CORRENTE CONTINUA CHE PER CORRENTE ALTERNATA. CONSENTE ALLO STUDENTE
VERSIONE AUTOMATICA IL SISTEMA DL 10280 È COSTITUITO DA UN KIT DI COMPONENTI ADATTO PER ASSEMBLARE LE MACCHINE ELETTRICHE ROTANTI, SIA PER CORRENTE CONTINUA CHE PER CORRENTE ALTERNATA. CONSENTE ALLO STUDENTE
Politecnico di Milano
 Politecnico di Milano FONDAMENTI DI AUTOMATICA Corso di laurea in Ingegneria Gestionale sez. A-D Prof. C. Piccardi Appello del 3/9/8 COGNOME: NOME: MATRICOLA: AVVERTENZA In base alla normativa in vigore,
Politecnico di Milano FONDAMENTI DI AUTOMATICA Corso di laurea in Ingegneria Gestionale sez. A-D Prof. C. Piccardi Appello del 3/9/8 COGNOME: NOME: MATRICOLA: AVVERTENZA In base alla normativa in vigore,
CONTROLLI AUTOMATICI Ingegneria Meccatronica
 CONTROLLI AUTOMATICI Ingegneria Meccatronica CONTROLLI AUTOMATICI INTRODUZIONE SIMULINK Ing. Tel. 0522 522234 e-mail: secchi.cristian@unimore.it http://www.ingre.unimore.it/staff/secchi Simulink Simulink
CONTROLLI AUTOMATICI Ingegneria Meccatronica CONTROLLI AUTOMATICI INTRODUZIONE SIMULINK Ing. Tel. 0522 522234 e-mail: secchi.cristian@unimore.it http://www.ingre.unimore.it/staff/secchi Simulink Simulink
Elementi di Modellistica
 Elementi di Modellistica Obiettivo: Sviluppare un modello matematico di un sistema fisico per il progetto di controllori. Un modello fisico per il controllo deve essere: descrittivo: in grado di catturare
Elementi di Modellistica Obiettivo: Sviluppare un modello matematico di un sistema fisico per il progetto di controllori. Un modello fisico per il controllo deve essere: descrittivo: in grado di catturare
Controllo cinematico Controllo dinamico di un singolo asse
 Corso di Robotica 1 Controllo cinematico Controllo dinamico di un singolo asse Prof. Alessandro De Luca Robotica 1 1 Controllo del moto si vuole realizzare effettivamente un moto desiderato regolazione
Corso di Robotica 1 Controllo cinematico Controllo dinamico di un singolo asse Prof. Alessandro De Luca Robotica 1 1 Controllo del moto si vuole realizzare effettivamente un moto desiderato regolazione
Descrizione caratteristiche cilindri elettrici serie ECC+
 Descrizione caratteristiche cilindri elettrici serie ECC+ Tipologie e potenzialità nuovo cilindro elettrico in cc 12/24V della famiglia EASY tipo ECC + Caratteristiche generali del sistema: Alimentazione
Descrizione caratteristiche cilindri elettrici serie ECC+ Tipologie e potenzialità nuovo cilindro elettrico in cc 12/24V della famiglia EASY tipo ECC + Caratteristiche generali del sistema: Alimentazione
MOTORI STEPPER NEMA23
 MOTORI STEPPER NEMA23 MOTORI STEPPER NEMA24 Cod. RTI-M1243042BR disponibile con freno da 1,5 Nm MOTORI STEPPER NEMA 34 Cod. RTI-M1343051BR disponibile con freno da 15 Nm MOTORI BRUSHLESS B05 Il B05 accompagna
MOTORI STEPPER NEMA23 MOTORI STEPPER NEMA24 Cod. RTI-M1243042BR disponibile con freno da 1,5 Nm MOTORI STEPPER NEMA 34 Cod. RTI-M1343051BR disponibile con freno da 15 Nm MOTORI BRUSHLESS B05 Il B05 accompagna
Modellistica dei Sistemi Meccanici
 1 Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 016/17 Corso di Fondamenti di Automatica A.A. 016/17 odellistica dei Sistemi eccanici Prof. Carlo Cosentino Dipartimento di edicina Sperimentale e
1 Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 016/17 Corso di Fondamenti di Automatica A.A. 016/17 odellistica dei Sistemi eccanici Prof. Carlo Cosentino Dipartimento di edicina Sperimentale e
Tecnologie Digitali. Laboratorio per il Terzo anno
 Tecnologie Digitali Laboratorio per il Terzo anno La prima parte del corso introduce alla fisica dei dispositivi a semiconduttore, con l'obiettivo di apprendere le tecnologie alla base della strumentazione
Tecnologie Digitali Laboratorio per il Terzo anno La prima parte del corso introduce alla fisica dei dispositivi a semiconduttore, con l'obiettivo di apprendere le tecnologie alla base della strumentazione
 Come pilotare un relè con Arduino Il relè è un dispositivo elettromeccanico costituito da un avvolgimento e da uno o più contatti meccanici, è utilizzato per operazione di interruzione e commutazione di
Come pilotare un relè con Arduino Il relè è un dispositivo elettromeccanico costituito da un avvolgimento e da uno o più contatti meccanici, è utilizzato per operazione di interruzione e commutazione di
CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE
 51 CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE In questo capitolo vengono presentate le prove sperimentali per l identificazione della coppia dovuta
51 CAPITOLO 5 PROCESSO DI IDENTIFICAZIONE E COMPENSAZIONE DELLA COPPIA GRAVITAZIONALE INTRODUZIONE In questo capitolo vengono presentate le prove sperimentali per l identificazione della coppia dovuta
Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione lineare.
 EasyLIN package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione lineare. Pacchetto composto da : o Unità lineare o attuatore lineare o Motorizzazione
EasyLIN package Sistema modulare integrati in un pacchetto per coprire applicazioni di posizionamento o movimentazione lineare. Pacchetto composto da : o Unità lineare o attuatore lineare o Motorizzazione
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
Introduzione e modellistica dei sistemi
 Introduzione e modellistica dei sistemi Modellistica dei sistemi dinamici meccanici Sistemi meccanici in traslazione: elementi base Sistemi in traslazione: equazioni del moto Sistemi in traslazione: rappresentazione
Introduzione e modellistica dei sistemi Modellistica dei sistemi dinamici meccanici Sistemi meccanici in traslazione: elementi base Sistemi in traslazione: equazioni del moto Sistemi in traslazione: rappresentazione
Indicazioni su come preparare la relazione su un esperienza di laboratorio
 Indicazioni su come preparare la relazione su un esperienza di laboratorio Riportare all inizio: nome e cognome; numero di matricola; anno in cui si è seguito il corso; gruppo con cui si è realizzata l
Indicazioni su come preparare la relazione su un esperienza di laboratorio Riportare all inizio: nome e cognome; numero di matricola; anno in cui si è seguito il corso; gruppo con cui si è realizzata l
Apparecchiatura Kit KS.ino2.1 Preliminare 0.1c
 Apparecchiatura Kit KS.ino2.1 Preliminare 0.1c Pagina 1 L apparecchiatura KS.ino2.1 è un Kit realizzato a scopo didattico, sperimentale; si presta ottimamente anche all utilizzo di automazioni casalinghe
Apparecchiatura Kit KS.ino2.1 Preliminare 0.1c Pagina 1 L apparecchiatura KS.ino2.1 è un Kit realizzato a scopo didattico, sperimentale; si presta ottimamente anche all utilizzo di automazioni casalinghe
Introduzione 2. Serie P20 4. Serie P28 6. Serie P35 8. Serie P Serie P Serie P Serie P Serie P85 18.
 INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Motori con Encoder 22 Azionamento Passo Passo 25 Codifica 26 Note
INDICE Introduzione 2 Serie P20 4 Serie P28 6 Serie P35 8 Serie P39 10 Serie P42 12 Serie P57 14 Serie P60 16 Serie P85 18 Serie P110 20 Motori con Encoder 22 Azionamento Passo Passo 25 Codifica 26 Note
INTERROLL MOTOTAMBURO 80D SENZA OLIO
 Descrizione del prodotto Tipi di materiale Applicazioni Caratteristiche Il mototamburo senza olio è ideale per applicazioni altamente dinamiche, impianti trasportatori nel settore della trasformazione
Descrizione del prodotto Tipi di materiale Applicazioni Caratteristiche Il mototamburo senza olio è ideale per applicazioni altamente dinamiche, impianti trasportatori nel settore della trasformazione
Lezione 1 17 Gennaio
 LabCont1: Laboratorio di Controlli 1 II Trim. 2007 Lezione 1 17 Gennaio Docente: Luca Schenato Stesori: Luca Schenato 1.1 Motore CC con motoriduttore e carica IPOTESI Figura 1.1. Schema meccanico dell
LabCont1: Laboratorio di Controlli 1 II Trim. 2007 Lezione 1 17 Gennaio Docente: Luca Schenato Stesori: Luca Schenato 1.1 Motore CC con motoriduttore e carica IPOTESI Figura 1.1. Schema meccanico dell
FORZE E PRINCIPI DELLA DINAMICA (1/29)
") FORZE E PRINCIPI DELLA DINAMICA (1/29) una forza applicata ad un corpo, libero di muoversi, lo mette in movimento o lo arresta (effetto dinamico della forza); una forza, applicata ad un corpo vincolato,
FORZE E PRINCIPI DELLA DINAMICA (1/29) una forza applicata ad un corpo, libero di muoversi, lo mette in movimento o lo arresta (effetto dinamico della forza); una forza, applicata ad un corpo vincolato,
Introduzione a Matlab e Simulink
 Introduzione a Matlab e Simulink Fondamenti di Automatica 1 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento,
Introduzione a Matlab e Simulink Fondamenti di Automatica 1 Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni? del sistema Come analizzare il comportamento,
Motivazioni: problema di analisi. Introduzione a Matlab e Simulink. Dove trovare altre informazioni? A cosa serve questa presentazione
 Introduzione a Matlab e Simulink Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni del sistema? Come analizzare il comportamento, l evoluzione di
Introduzione a Matlab e Simulink Motivazioni: problema di analisi Modello del sistema dinamico parametri Segnali d eccitazione Prestazioni del sistema? Come analizzare il comportamento, l evoluzione di
PIANO DI LAVORO DEI DOCENTI
 Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Pag. 1 di 5 Docente: Materia insegnamento: SISTEMI ELETTRONICI AUTOMATICI Dipartimento: ELETTRONICA Classe Anno scolastico: 1 Livello di partenza (test di ingresso, livelli rilevati) Per il modulo di automazione
Fondamenti di biomeccanica del movimento. Prof. Francesco Sgrò Associate Professor
 Università degli Studi Kore di Enna Facoltà di Scienze dell uomo e della società Corso di Laurea in Scienze delle attività motorie e sportive Fondamenti di biomeccanica del movimento Prof. Francesco Sgrò
Università degli Studi Kore di Enna Facoltà di Scienze dell uomo e della società Corso di Laurea in Scienze delle attività motorie e sportive Fondamenti di biomeccanica del movimento Prof. Francesco Sgrò
Serie MTS: motori Stepper con flangia di fissaggio Nema 23 o 24 Serie MTB: motori Brushless con potenze da 100, 400 e 750 W
 C_Electrics > 206 > Motori per l attuazione elettrica Serie MTS e MTB Motori per l attuazione elettrica Serie MTS e MTB Novità Serie MTS: motori Stepper con flangia di fissaggio Nema 23 o 24 Serie MTB:
C_Electrics > 206 > Motori per l attuazione elettrica Serie MTS e MTB Motori per l attuazione elettrica Serie MTS e MTB Novità Serie MTS: motori Stepper con flangia di fissaggio Nema 23 o 24 Serie MTB:
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria
 UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello DM 509/99 e DM 270/04 e Diploma Universitario)
UNIVERSITA DEGLI STUDI DI BRESCIA Facoltà di Ingegneria ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello DM 509/99 e DM 270/04 e Diploma Universitario)
Fondamenti di Automatica
 Fondamenti di Automatica Esempi applicativi Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Esempi applicativi TESTINA
Fondamenti di Automatica Esempi applicativi Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: marcello.bonfe@unife.it pag. 1 Esempi applicativi TESTINA
Indicazioni su come preparare la relazione su un esperienza di laboratorio
 Indicazioni su come preparare la relazione su un esperienza di laboratorio Riportare all inizio: nome e cognome; numero di matricola; anno in cui si è seguito il corso; gruppo con cui si è realizzata l
Indicazioni su come preparare la relazione su un esperienza di laboratorio Riportare all inizio: nome e cognome; numero di matricola; anno in cui si è seguito il corso; gruppo con cui si è realizzata l
Sistemi Dinamici a Tempo Continuo
 Parte 2 Aggiornamento: Febbraio 2012 Parte 2, 1 T Sistemi Dinamici a Tempo Continuo Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi
Parte 2 Aggiornamento: Febbraio 2012 Parte 2, 1 T Sistemi Dinamici a Tempo Continuo Ing. Roberto Naldi DEIS-Università di Bologna Tel. 051 2093876 Email: roberto.naldi@unibo.it URL: www-lar.deis.unibo.it/~rnaldi
Controllo del robot Pendubot
 Università di Roma La Sapienza Corso di Laurea in Ingegneria Elettronica Corso di Fondamenti di Automatica Controllo del robot Pendubot Ing. Massimo Cefalo I sistemi meccanici sottoattuati Il sistema Quanser
Università di Roma La Sapienza Corso di Laurea in Ingegneria Elettronica Corso di Fondamenti di Automatica Controllo del robot Pendubot Ing. Massimo Cefalo I sistemi meccanici sottoattuati Il sistema Quanser
Facoltà di Ingegneria Prova intermedia 2 di Meccanica applicata alle macchine. 20 Dicembre 2018, durata 120 minuti.
 Facoltà di Ingegneria Prova intermedia 2 di Meccanica applicata alle macchine. 20 Dicembre 2018, durata 120 minuti. Matricola: 1. Si consideri il sistema motore-riduttore-utilizzatore in Figura 1. La coppia
Facoltà di Ingegneria Prova intermedia 2 di Meccanica applicata alle macchine. 20 Dicembre 2018, durata 120 minuti. Matricola: 1. Si consideri il sistema motore-riduttore-utilizzatore in Figura 1. La coppia
Indice Introduzione Capitolo 1 Pendolo inverso con volano
 1 Introduzione XV Capitolo 1 Pendolo inverso con volano 1 1.1 Descrizione del sistema 1 1.1.1 Asta 2 1.1.2 Base 3 1.1.3 Motore 3 1.1.4 Volano 5 1.1.5 Sensore 5 1.1.6 Box di controllo e comando 6 1.1.7
1 Introduzione XV Capitolo 1 Pendolo inverso con volano 1 1.1 Descrizione del sistema 1 1.1.1 Asta 2 1.1.2 Base 3 1.1.3 Motore 3 1.1.4 Volano 5 1.1.5 Sensore 5 1.1.6 Box di controllo e comando 6 1.1.7
INTERROLL MOTOTAMBURO 80D
 Descrizione del prodotto Tipi di materiale Applicazioni Caratteristiche Il mototamburo è ideale per applicazioni altamente dinamiche, impianti trasportatori nel settore della trasformazione alimentare,
Descrizione del prodotto Tipi di materiale Applicazioni Caratteristiche Il mototamburo è ideale per applicazioni altamente dinamiche, impianti trasportatori nel settore della trasformazione alimentare,
Dispositivi Minimamente Invasivi
 Dispositivi Minimamente Invasivi per Diagnosi, Monitoraggio e Terapia Esercitazione 10 Alessandro Tognetti Nicola Carbonaro a.tognetti@centropiaggio.unipi.it tti@ t i i i i it nicola.carbonaro@centropiaggio.unipi.it
Dispositivi Minimamente Invasivi per Diagnosi, Monitoraggio e Terapia Esercitazione 10 Alessandro Tognetti Nicola Carbonaro a.tognetti@centropiaggio.unipi.it tti@ t i i i i it nicola.carbonaro@centropiaggio.unipi.it
L adozione di MATLAB e Simulink nei Corsi di Ingegneria al Politecnico di Milano. Maurizio Magarini MATLAB EXPO Milano, 4 novembre 2014
 L adozione di MATLAB e Simulink nei Corsi di Ingegneria al Politecnico di Milano MATLAB EXPO Milano, 4 novembre 2014 Sommario Introduzione. Il ruolo dei laboratori informatici nella didattica, formazione
L adozione di MATLAB e Simulink nei Corsi di Ingegneria al Politecnico di Milano MATLAB EXPO Milano, 4 novembre 2014 Sommario Introduzione. Il ruolo dei laboratori informatici nella didattica, formazione
SISTEMA DI POSIZIONAMENTO MICROMETRICO PER APPLICAZIONI CON FASCI DI PARTICELLE
 UNIVERSITA DEGLI STUDI DI CATANIA FACOLTA DI INGEGNERIA ISTITUTO NAZIONALE DI FISICA NUCLEARE LABORATORI NAZIONALI DEL SUD Corso di Laurea di I livello in Ingegneria Informatica SISTEMA DI POSIZIONAMENTO
UNIVERSITA DEGLI STUDI DI CATANIA FACOLTA DI INGEGNERIA ISTITUTO NAZIONALE DI FISICA NUCLEARE LABORATORI NAZIONALI DEL SUD Corso di Laurea di I livello in Ingegneria Informatica SISTEMA DI POSIZIONAMENTO
PROGRAMMA SVOLTO. Materia insegnata Tecnologie Informatiche. Classe I A - indirizzo elettronica ed elettrotecnica Istituto VOLTA
 PROGRAMMA SVOLTO Docente Prof.ssa De Filippis Marianna ITP Prof. Antonello Antonelli Materia insegnata Tecnologie Informatiche Classe I A - indirizzo elettronica ed elettrotecnica Istituto VOLTA Anno scolastico
PROGRAMMA SVOLTO Docente Prof.ssa De Filippis Marianna ITP Prof. Antonello Antonelli Materia insegnata Tecnologie Informatiche Classe I A - indirizzo elettronica ed elettrotecnica Istituto VOLTA Anno scolastico
Complementi di Controlli Automatici. Controllo del Robot Pendubot
 Università di Roma Tre A.A. 25/6 Complementi di Controlli Automatici Controllo del Robot Pendubot Marilena Vendittelli DIS, Università di Roma La Sapienza Sommario Il sistema Quanser Pendubot Obiettivi
Università di Roma Tre A.A. 25/6 Complementi di Controlli Automatici Controllo del Robot Pendubot Marilena Vendittelli DIS, Università di Roma La Sapienza Sommario Il sistema Quanser Pendubot Obiettivi
MACCHINE ELETTRICHE-OPENLAB-0.2 kw
 IL SISTEMA DL 10280 È COSTITUITO DA UN KIT DI COMPONENTI ADATTO PER ASSEMBLARE LE MACCHINE ELETTRICHE ROTANTI, SIA PER CORRENTE CONTINUA CHE PER CORRENTE ALTERNATA. CONSENTE ALLO STUDENTE UNA REALIZZAZIONE
IL SISTEMA DL 10280 È COSTITUITO DA UN KIT DI COMPONENTI ADATTO PER ASSEMBLARE LE MACCHINE ELETTRICHE ROTANTI, SIA PER CORRENTE CONTINUA CHE PER CORRENTE ALTERNATA. CONSENTE ALLO STUDENTE UNA REALIZZAZIONE
Sistemi di corpi La prossima lezione faremo esercizi con volontari alla lavagna
 Sistemi di corpi La prossima lezione faremo esercizi con volontari alla lavagna Esercizio 1 [Urti elastici] Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro
Sistemi di corpi La prossima lezione faremo esercizi con volontari alla lavagna Esercizio 1 [Urti elastici] Una biglia P 1 di massa m 1 = 100 g e velocità v 0,1 di modulo 2 m/s urta elasticamente contro
Prot. n del 20/04/ [UOR: 10 - Classif. X/4]
![Prot. n del 20/04/ [UOR: 10 - Classif. X/4]](/thumbs/91/106685838.jpg "Prot. n del 20/04/ [UOR: 10 - Classif. X/4]") Prot. n. 0039992 del 20/04/2018 - [UOR: 10 - Classif. X/4] Avviso di consultazione del mercato per confermare i presupposti al ricorso di una procedura negoziata senza previa pubblicazione di bando di
Prot. n. 0039992 del 20/04/2018 - [UOR: 10 - Classif. X/4] Avviso di consultazione del mercato per confermare i presupposti al ricorso di una procedura negoziata senza previa pubblicazione di bando di
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n PONTEDERA (PI) ANNO SCOLASTICO 2005/2006 CORSO SPERIMENTALE LICEO TECNICO
 ANNO SCOLASTICO 2005/2006 CORSO SPERIMENTALE LICEO TECNICO") ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 2-56025 PONTEDERA (PI) 0587 53566/55390 - Fax: 0587 57411 - : iti@marconipontedera.it - Sito WEB: www.marconipontedera.it ANNO SCOLASTICO
ISTITUTO TECNICO INDUSTRIALE STATALE "G. MARCONI" Via Milano n. 2-56025 PONTEDERA (PI) 0587 53566/55390 - Fax: 0587 57411 - : iti@marconipontedera.it - Sito WEB: www.marconipontedera.it ANNO SCOLASTICO
Fondamenti di Informatica e Programmazione
 Fondamenti di Informatica e Programmazione Introduzione al Corso Prof. Marco Lombardi A.A. 2018/19 Informazioni sul Corso 1/6 8 CFU 80 ore di lezione, suddivise in Lezioni frontali Esercitazioni pratiche
Fondamenti di Informatica e Programmazione Introduzione al Corso Prof. Marco Lombardi A.A. 2018/19 Informazioni sul Corso 1/6 8 CFU 80 ore di lezione, suddivise in Lezioni frontali Esercitazioni pratiche
UNIVERSITÀ DEGLI STUDI DI BRESCIA
 UNIVERSITÀ DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Prima
UNIVERSITÀ DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Prima
MECCANICA APPLICATA. Esercizi di ALLE MACCHINE I POLITECNICO DI BARI. PhD Student: Ing. Ilario De Vincenzo
 POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
Facoltà di Ingegneria Esame di Meccanica applicata alle macchine. 10 Gennaio 2019, durata 120 minuti.
 Facoltà di Ingegneria Esame di Meccanica applicata alle macchine. 10 Gennaio 2019, durata 120 minuti. Matricola: 1. Si consideri il meccanismo a glifo in Figura 1. L asta (1) schematizza la manovella di
Facoltà di Ingegneria Esame di Meccanica applicata alle macchine. 10 Gennaio 2019, durata 120 minuti. Matricola: 1. Si consideri il meccanismo a glifo in Figura 1. L asta (1) schematizza la manovella di
INDICE KIT PER TRASFORMATORI E MOTORI KIT PER IL MONTAGGIO DI 2 TRASFORMATORI DL 2106
 INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI BOBINATRICE PER MOTORI E TRASFORMATORI BOBINATRICE DIDATTICA PER MOTORI DL 1010B DL 1010D DL
INDICE BOBINATRICI BOBINATRICE MATASSATRICE MANUALE COLONNA PORTAROCCHE CON TENDIFILO BOBINATRICE PER MOTORI BOBINATRICE PER MOTORI E TRASFORMATORI BOBINATRICE DIDATTICA PER MOTORI DL 1010B DL 1010D DL
UNIVERSITA DEGLI STUDI DI BRESCIA
 UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
UNIVERSITA DEGLI STUDI DI BRESCIA ESAME DI STATO DI ABILITAZIONE ALL'ESERCIZIO DELLA PROFESSIONE DI INGEGNERE (Lauree di primo livello D.M. 509/99 e D.M. 270/04 e Diploma Universitario) SEZIONE B - Seconda
BANCO PROVA PER MACCHINE ELETTRICHE DL EM-TEST
 BANCO PROVA PER DL EM-TEST Il DL EM-TEST è un banco multifunzione per lo studio delle macchine elettriche della serie Eurolab (0.3 kw) e Unilab (1.1 kw) utilizzando un approccio di test automatizzato.
BANCO PROVA PER DL EM-TEST Il DL EM-TEST è un banco multifunzione per lo studio delle macchine elettriche della serie Eurolab (0.3 kw) e Unilab (1.1 kw) utilizzando un approccio di test automatizzato.
LAUREA IN INGEGNERIA MECCATRONICA
 LAUREA IN INGEGNERIA MECCATRONICA Relatore: prof. Diego Dainese Laureando : Francesco Domenico Rigon POSIZIONAMENTO ACCURATO MEDIANTE I MOTORI PASSO-PASSO I motori passo-passo hanno particolarità che spesso
LAUREA IN INGEGNERIA MECCATRONICA Relatore: prof. Diego Dainese Laureando : Francesco Domenico Rigon POSIZIONAMENTO ACCURATO MEDIANTE I MOTORI PASSO-PASSO I motori passo-passo hanno particolarità che spesso
LMR 03 ATTUATORE A VITE TRAPEZIA. DIMENSIONI DI INGOMBRO La = Lc + Corsa. Lunghezza cavo motore 0.3 m. ( motore con encoder) LUNGHEZZA Lc [mm] La [mm]
![LMR 03 ATTUATORE A VITE TRAPEZIA. DIMENSIONI DI INGOMBRO La = Lc + Corsa. Lunghezza cavo motore 0.3 m. ( motore con encoder) LUNGHEZZA Lc [mm] La [mm]](/thumbs/56/38053848.jpg "LMR 03 ATTUATORE A VITE TRAPEZIA. DIMENSIONI DI INGOMBRO La = Lc + Corsa. Lunghezza cavo motore 0.3 m. ( motore con encoder) LUNGHEZZA Lc [mm] La [mm]") ATTUATORE A VITE TRAPEZIA LMR 03 Corsa DIMENSIONI DI INGOMBRO La = Lc + Corsa Lc T Lunghezza cavo motore 0.3 m CODICE CORSA CORSA [mm] LUNGHEZZA Lc [mm] La [mm] MASSA [kg] C100 100 230 330 2.6 C150 150
ATTUATORE A VITE TRAPEZIA LMR 03 Corsa DIMENSIONI DI INGOMBRO La = Lc + Corsa Lc T Lunghezza cavo motore 0.3 m CODICE CORSA CORSA [mm] LUNGHEZZA Lc [mm] La [mm] MASSA [kg] C100 100 230 330 2.6 C150 150
MechLav - Elenco su base funzionale delle attrezzature disponibili con relative modalità di utilizzo
 MechLav - Elenco su base funzionale delle attrezzature disponibili con relative modalità di utilizzo Descrizione attrezzatura Accelerometri monoassiali, triassiali, miniaturizzati, alta sensibilità, shock,
MechLav - Elenco su base funzionale delle attrezzature disponibili con relative modalità di utilizzo Descrizione attrezzatura Accelerometri monoassiali, triassiali, miniaturizzati, alta sensibilità, shock,
Poichési conserva l energia meccanica, il lavoro compiuto dal motore è pari alla energia potenziale accumulata all equilibrio:
 Meccanica 24 Aprile 2018 Problema 1 (1 punto) Un blocco di mass M=90 kg è attaccato tramite una molla di costante elastiìca K= 2 10 3 N/m, massa trascurabile e lunghezza a riposo nulla, a una fune inestensibile
Meccanica 24 Aprile 2018 Problema 1 (1 punto) Un blocco di mass M=90 kg è attaccato tramite una molla di costante elastiìca K= 2 10 3 N/m, massa trascurabile e lunghezza a riposo nulla, a una fune inestensibile
Un ponte tra scuola e impresa. Robotica e Innovazioni nell Educazione Modena, novembre
 Un ponte tra scuola e impresa Robotica e Innovazioni nell Educazione Modena, 18-19 novembre 2013 1 Somm mario La nascita Il laboratorio Il percorso di visita Summer School Simulazione e modellizzazionee
Un ponte tra scuola e impresa Robotica e Innovazioni nell Educazione Modena, 18-19 novembre 2013 1 Somm mario La nascita Il laboratorio Il percorso di visita Summer School Simulazione e modellizzazionee
MECCANICA QUANTISTICA
 La Meccanica MECCANICA: Studio del moto di un corpo in tutti i suoi aspetti. Si divide in: STATICA: Forze e Equilibrio. Studia delle condizioni per l equilibrio (corpi fermi). CINEMATICA: Descrizione il
La Meccanica MECCANICA: Studio del moto di un corpo in tutti i suoi aspetti. Si divide in: STATICA: Forze e Equilibrio. Studia delle condizioni per l equilibrio (corpi fermi). CINEMATICA: Descrizione il
Laboratorio di Automazione. Azionamenti Elettrici: Generalità e Motore DC
 Laboratorio di Automazione Azionamenti Elettrici: Generalità e Motore DC Ing. Andrea Tilli DEIS - Università degli Studi di Bologna E-Mail: atilli@deis.unibo.it Indice Definizione Struttura Modello del
Laboratorio di Automazione Azionamenti Elettrici: Generalità e Motore DC Ing. Andrea Tilli DEIS - Università degli Studi di Bologna E-Mail: atilli@deis.unibo.it Indice Definizione Struttura Modello del