Riconoscimento del volto
|
|
|
- Leonora Rostagno
- 8 anni fa
- Visualizzazioni
Transcript
1 Riconoscimento del volto Tecniche 3D e 3D+2D Annalisa Franco annalisa.franco@unibo.it Dario Maio dario.maio@unibo.it Variabilità intra-classe 2 Alcuni contenuti sono in parte ripresi dalla presentazione

2 FRVT 2002 FRVT2002 ha dimostrato che le performance degli algoritmi 2D sono drasticamente ridotte se si usano immagini dello stesso soggetto prese con illuminazioni molto diverse tra loro (immagini indoor & outdoor prese nello stesso giorno). 3 FRVT FRVT2000 and FRVT2002 show that one of the more difficult tasks for modern facial recognition systems is recognising faces in non-frontal images. Most facial recognition systems perform well when all of the images are frontal. But, as a subject becomes more and more off angle (both horizontally and vertically), performance decreases. Source: Face Recognition Vendor Test 2002, Overview and Summary, March2003.

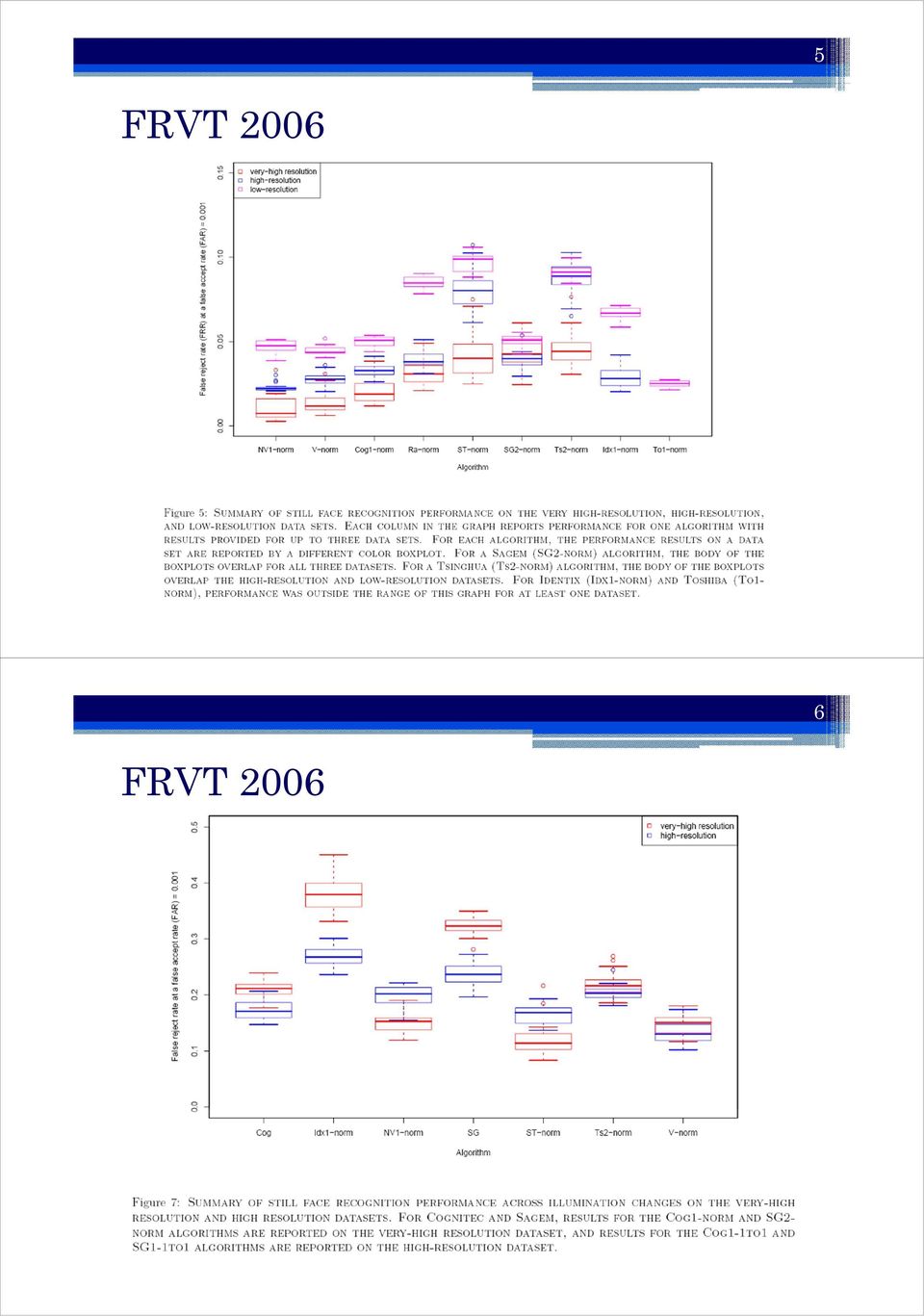
3 5 FRVT FRVT 2006
4 7 FRVT Invarianza rispetto alle variazioni del volto Fattori Shape (3D) Appearance (2D) Posa Sì No Illuminazione Sì No Espressione No No Invecchiamento No No Makeup Sì No Accessori No No Né i modelli 2D né quelli 3D offrono un invarianza rispetto a tutte le possibili variazioni del volto

5 9 Rappresentazione di un volto 2D Intensity Image: un immagine bidimensionale in cui il valore di ogni pixel rappresenta l intensità della luce riflessa sul quel punto. Il colore di un pixel è dipende da come la luce è riflessa sulla superficie. 2.5D Range Image: un immagine bidimensionale in cui il valore associato a ogni pixel rappresenta la distanza tra la sorgente e il punto 3D Shaded Model: una struttura di punti e poligoni connessi tra loro in uno spazio a tre dimensioni 2D 2.5D 3D 10 Il riconoscimento 3D Vantaggi: Le tecniche 3D sono più efficaci di quelle 2D poiché il modello 3D è molto più ricco di informazioni. Un sistema di riconoscimento 3D è più robusto rispetto a cambiamenti di posa e illuminazione. Il modello 3D permette anche la generazione di pose virtuali (es. con diverse espressioni del volto). Svantaggi: I dispositivi d acquisizione 3D sono costosi (il costo aumenta con la precisione di acquisizione). Alcuni sistemi di acquisizione 3D sono invasivi: Tempi di acquisizione lunghi Alcuni sistemi possono essere pericolosi per la retina (laser scanner) Sostituire in un organizzazione i dispositivi 2D (macchine fotografiche, videocamere, ecc.) con nuove apparecchiature 3D è un processo che richiede tempo e costi elevati

6 11 Rendering 3D (1) Vertici Un vertice specifica la locazione di un punto Non ha dimensione È definito da una terna di coordinate (x,y,z) Vettori liberi Un vettore è caratterizzato da una direzione e una magnitudine (lunghezza) Non ha locazione Una terna di valori (dx, dy, dz) indica la direzione e il verso del vettore (x,y,z) (dx,dy,dz) origine 12 Rendering 3D (2) Segmenti Un segmento è un percorso lineare che unisce due vertici Poligoni Un poligono è costituito da una sequenza complanare di punti uniti da segmenti (x 2,y 2,z 2 ) (x 1,y 1,z 1 ) origine
 (x 1,y 1,z 1 )")
7 13 Rendering 3D (3) Mesh poligonale Una mesh poligonale è un insieme di poligoni che godono di alcune proprietà tra cui: ogni lato appartiene almeno ad una poligono ogni vertice ha almeno due lati origine 14 Rendering 3D (4) Normali Una normale di un poligono è un vettore perpendicolare a un piano o a un poligono utile per comprendere la posa e l orientamento di un poligono La normale di un vertice è la risultante della somma delle normali dei poligoni a cui il vertice appartiene utile per comprendere la posa e l orientamento di un vertice v 1 n v 3 v 2 Normale al vertice v 0 Normale a una superficie v 0 origine

8 15 Rendering 3D (5) Texture mapping Una texture aggiunge dettagli alla superficie di un oggetto 3D Problema: come assegnare i pixel della texture? 16 Rendering 3D (6) È possibile assegnare un colore ad un poligono; il poligono ha un singolo colore, uniforme, lungo la sua superficie. È possibile assegnare un colore a un vertice; il colore del poligono è la combinazione dei colori dei suoi vertici, che può essere di diversi tipi, es: flat: il colore del poligono è uno ed è la somma dei colori dei vertici smooth: il colore del poligono non è uniforme ma cambia all avvicinarsi dei suoi vertici. Un altro modo per assegnare i colori a una mesh consiste nel mappare un immagine 2D lungo la superficie della mesh. Texture: indica le mappe (immagini bitmap o shader procedurali) che sono applicate sulle superfici dei poligoni degli oggetti 3D. Texture Mapping: consiste nella procedura utilizzata per calcolare la posizione e l orientamento di una tessitura sulla superficie dell oggetto 3D. Queste immagini in fase di rendering rappresentano il colore, la luminosità, la riflessione, ecc. delle superfici 3D.

9 17 Rendering 3D (7) La mappatura di tipo planare consiste in una specie di proiezione piana dell immagine bitmap sulla superficie del modello 3D. È impiegata per oggetti che sono relativamente piatti o totalmente visibili attraverso un angolo qualsiasi della camera La proiezione è basata sulla forma del cilindro che avvolge completamente il modello 3D. È impiegata per modelli 3D che possono essere completamente inclusi all interno della forma del cilindro. Planar mapping Cylindrical mapping 18 Rendering 3D (8) Valgono considerazioni analoghe al cylindrical mapping ma con riferimento ad altre forme geometriche Box mapping Spherical mapping
 Valgono considerazioni analoghe al cylindrical mapping ma con riferimento ad altre forme geometriche Box")
10 19 Rendering 3D (9) Rendering (presentazione fotorealistica) : processo di generazione di un immagine bidimensionale a partire da una descrizione (mesh) degli oggetti tridimensionali. Il rendering di un modello 3D genera un immagine bidimensionale (frame) che rappresenta il modello da un preciso punto di vista. Modelli del volto: possibili scenari 20 Query/Test 2D 3D Template 2D 3D Uso di modelli 3D per reperire immagini 2D!

11 21 Fasi del riconoscimento 3D Acquisizione Pre-processing Estrazione feature Identificazione/ verifica 22 Acquisizione 3D: camere stereoscopiche Acquisiscono un volto con due (o più) camere stereoscopiche. La superficie 3D risultante è generata a partire dalla coppia di immagini. Sono sensibili alle variazioni d illuminazione. Costo: basso. Qualità d acquisizione: media. Tempo d acquisizione: real-time. Algoritmo di ricostruzione 1. Trovare le feature in una delle due immagini 2. Cercare le stesse feature nell altra immagine 3. Calcolare la corrispondenza tra la coppia di feature per trovare la coordinata z.

12 23 Acquisizione 3D: Structured-Light Scanners (1) Gli scanner a luce strutturata tipicamente proiettano un pattern luminoso sul volto. La sorgente luminosa è solitamente una luce alogena ordinaria, quindi non causa problemi alla retina. Leggermente sensibili alle variazioni d illuminazione Costo: medio-elevato Qualità d acquisizione: medio-elevata Tempo d acquisizione: 3-8 secondi 24 Acquisizione 3D: Structured-Light Scanners (2) Il pattern luminoso è distorto a causa della superficie del volto. Possono essere utilizzati differenti pattern luminosi (griglie, linee, cerchi, sinusoidi, ecc.). Gli scanner a luce strutturata catturano una superficie completa da un particolare punto di vista. I dati provenienti da punti di vista multipli possono essere combinati per creare un modello 3D completo della testa.
.")
13 25 Acquisizione 3D: Laser scanner Gli scanner laser proiettano un singolo fascio laser sul volto. L algoritmo di generazione del modello 3D è simile a quello utilizzato dagli scanner a luce strutturata. La sorgente laser è invasiva e pericolosa per la retina. Non sono sensibili alle variazioni d illuminazione. Costo: medio-elevato La qualità d acquisizione è elevata Tempo d acquisizione: 6-30 secondi. 26 Dispositivi di acquisizione 3D Enrollment Station a structured light system Door Access Control uses invisible nearinfrared light

14 27 Dispositivi di acquisizione 3D Minolta Vivid 910 scanner Acquisition time ~ 1sec. 320x240 image size Depth resolution < 0.1 mm Intensity image 2.5D Range image Rendered image Immagini 2.5D vs. modelli 3D (1) Una Range Image (o immagine 2.5D) è una immagine bidimensionale che contiene al proprio interno informazioni tridimensionali. Ogni pixel rappresenta un punto dello spazio il cui colore indica la profondità del punto dalla sorgente (scanner). Lo spazio colore può essere a toni di grigio o RGB (Red, Green, Blue). 28
.")
 dove le coordinate x e y sono equidistanti mentre il valore della coordinata z varia in dipendenza del colore del pixel (z rappresenta infatti la")
15 Immagini 2.5D vs. modelli 3D (2) La generazione della mesh 3D avviene in due fasi: 1. generazione della nuvola di vertici (x,y,z) dove le coordinate x e y sono equidistanti mentre il valore della coordinata z varia in dipendenza del colore del pixel (z rappresenta infatti la profondità) 2. Triangolarizzazione della nuvola dei punti (mesh di triangoli adiacenti) 29 Immagini 2.5D vs. modelli 3D (3) 30
 2.")
16 Morphable models (1) Un sistema d acquisizione atipico è quello che sfrutta una tecnica tradizionale della computer graphics, il morphing. A partire da un modello 3D iniziale si ottiene un altro modello 3D finale. I morphable model sono dunque rappresentazioni dinamiche della superficie del volto, che contengono informazioni sulla struttura dinamica (ad esempio muscolatura facciale) in aggiunta alle informazioni sulla geometria. Sono sensibili alle variazioni d illuminazione costo : basso, qualità d acquisizione: media, tempo d acquisizione: > 1 minuto. Generazione del modello 3D finale 1. Si acquisiscono due o tre immagini fotografiche del volto (frontale, laterale, diagonale) 2. Si cambiano la forma e i colori di un modello generico di volto (morphable model) in accordo al contenuto delle immagini. 3. Si genera la texture combinando le due o tre immagini. 31 Morphable models (2) I morphable model consentono di generare differenti espressioni facciali sintetiche che possono essere sfruttate al fine di prevedere le espressioni facciali reali che un individuo può avere durante il processo di acquisizione. Facegen Modeller ( è uno strumento commerciale in grado di modellare diverse espressioni facciali nonché molteplici aspetti diversi tra cui: 32 gender morphing age morphing race morphing

17 Pre-processing (1) I sistemi di scansione tridimensionale sono affetti da errori di acquisizione per cui si rende necessario operare alcuni accorgimenti: Noise removal: spikes (filters), clutter(manually), noise(medianfilter) Holes filling (Gaussian smoothing, linear interpolation, symmetrical interpolation) 33 Pre-processing (2) sub-sampling Mesh poligonali molto accurate possano essere computazionalmente onerose da gestire, dunque è spesso necessario operare una semplificazione Usualmente si applica un algoritmo incrementale che rimuove un vertice alla volta e ripara il buco lasciato. Obiettivo: rimuovere il maggior numero possibile di vertici facendo in modo che la risultante maglia semplificata sia una buona approssimazione della mesh originale. 34

18 Pre-processing (3) smoothing Operazione che consente di levigare gli angoli tra i poligoni al fine di creare una superficie più liscia. Tipico algoritmo: Calcolare la curvatura locale α tra un insieme di vertici vicini. Se α contiene un punto p di massimo o di minimo più grande di un valore di soglia t smussare la superficie sostituendo p con il valore medio dei punti adiacenti. 35 prima e dopo lo smoothing Pre-processing (4) allineamento Principali punti di repere nell anatomia di un volto 36 I punti possono essere localizzati sulle immagini 2D oppure direttamente sul modello 3D acquisito. 1. localizzare un numero finito di punti caratteristici di un volto (es. angolo degli occhi, punta del naso, centro della bocca); 2. allineare (rotazione, traslazione, scala) i volti riducendo la distanza tra punti corrispondenti al minimo
 allineamento Principali punti di repere nell anatomia di un volto 36 I punti possono essere localizzati sulle immagini 2D oppure direttamente sul")
19 37 Estrazione feature (1) Alcuni metodi d estrazione e analisi delle feature 3D sono indipendenti dall orientamento; non è richiesto in tal caso alcun allineamento. Gli algoritmi di riconoscimento facciale 3D operano spesso sull analisi della curvatura locale e globale del modello del volto. 38 Estrazione feature (2) analisi curvatura Crest Lines: si individuano le zone a maggior curvatura Local Curvature: si rappresenta la curvatura locale con un colore Local Features: il volto è segmentato in alcune zone d interesse
 analisi curvatura Crest Lines: si individuano le zone a maggior curvatura Local Curvature: si")
20 39 Classificazione e verifica I metodi di classificazione hanno l obiettivo di archiviare, organizzare e indicizzare i modelli 3D in un database. I metodi sono analoghi a quelli applicati per il 2D ma adattati al caso 3D (PCA, non-linear PCA, Fisher mapping, ). La verifica d identità si ottiene misurando la distanza (euclidea, di Manhattan, di Chebychev,..) tra coppie di feature facciali e fissando un valore di soglia. 40
. La verifica d identità si ottiene misurando la distanza (euclidea, di Manhattan, di Chebychev,.")
21 41 Il sistema di riconoscimento 3D 1. X. Lu, D. Colbry, A.K. Jain, Three-Dimensional Model Based Face Recognition, In Proc. International Conference on Pattern Recognition, X. Lu, A.K. Jain, D. Colbry, Matching 2.5D Face Scans to 3D Models, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 28, no. 1, pp , Costruzione del modello 3D 2.5D Scans 3D Model 42 Creazione del modello 3D a partire da 5 immagini 2.5D utilizzando software commerciali (Geomagic Studio e Rapid Form); Rimozione del rumore e riempimento dei buchi Semplificazione del modello (riduzione a poligoni).
22 43 Rappresentazione del modello 3D Mesh associata Modello 3D con texture 44 Matching di superfici
23 Estrazione dei feature point A partire da un immagine 2.5D sono individuati 3 feature point che permettono: di calcolare la trasformazione rigida per l allineamento dell immagine 2.5D e il modello 3D; di allineare una griglia di punti di controllo usata poi per l allineamento finale. La localizzazione dei feature point avviene sulla base di un indice di forma (shape index), valutato in ogni punto dell immagine 2.5D. Lo shape index nel punto p è definito usando il valore massimo (k 1 ) e quello minimo (k 2 ) della curvatura locale. S( p) = tan π 1 κ1( p) + κ 2( p) κ ( p) κ ( p) Lo shape index assume valori nell intervallo [0,1]. Il valore calcolato è indipendente dal sistema di coordinate e può quindi essere usato per la ricerca di punti simili in immagini 2.5D con pose diverse Shape index 46

24 47 Localizzazione dei feature point Gli angoli interni degli occhi hanno un valore di shape index molto vicino a 0 I feature point sono usati per un allineamento approssimativo 48 Allineamento approssimativo La trasformazione rigida T è approssimata sulla base della corrispondenza di tre feature point: T = T R Θ dove c t p p A C a T è la trasformazione totale dal set di punti a al set p; T C-a : traslazione che porta il centroide del triangolo a nell origine degli assi; R a : rotazione nel piano xy; : rotazione ottimale ai fini dell allineamento dei vertici nel piano xy; R p t rotazione al di fuori del piano xy nel sistema di coordinate di p; T Cp traslazione dei vertici in modo che i R centroidi dei due set coincidano. T D. M. Weinstein, The Analytic 3-D Transform for the Least-Squared Fit of Three Pairs of Corresponding Points, School of Computing Technical Report, no. UUCS , Univ. of Utah, 1998.
 che, estratte dai volumi da correlare, sono poi descritte come un insieme di")
25 49 Allineamento preciso L allineamento è effettuato usando l algoritmo Iterative Closest Point (ICP). L algoritmo prevede l uso combinato di caratteristiche geometriche di tipo differente (punti, superfici, linee, curve) che, estratte dai volumi da correlare, sono poi descritte come un insieme di punti. Per ogni punto di riferimento è identificato il punto del volume da registrare geometricamente più vicino ed è poi calcolata la trasformazione che minimizza ai minimi quadrati la distanza tra le coppie di punti. Si applica la trasformazione identificata e si ripete la procedura di allineamento fino a convergenza. 1. P. Besl, N. McKay, A Method for Registration of 3D Shapes, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 14, no. 2, pp , Y. Chen, G. Medoni, Object Modeling by Registration of Multiple Range Images, Image and Vision Computing, vol. 10, no. 3, pp , Selezione dei punti di controllo 50 Right profile Frontal scan Left profile Caratteristiche dei punti di controllo: regioni meno deformabili a causa di espressioni del volto; nel complesso offrono la maggior copertura possibile del volto.
26 51 Esempi di allineamento (1) Test scan Matching con modello vero Matching con impostore 52 Esempi di allineamento (2) Test scan Matching con modello vero Matching con impostore
27 Matching Per il matching si utilizza la distanza minimizzata dall algoritmo ICP in fase di allineamento: MD ICP = 1 N N c i = 1 c ( Ψ( p ), S ) d(.,.) è la metrica di distanza di un punto da un piano; Ψ(.) è la trasformazione rigida applicata a ciascun punto di controllo p i nell immagine 2.5D di test; S i è il piano tangente corrispondente a p i nel modello 3D N c è il numero di punti di controllo. Inoltre a ogni punto di controllo è associato un valore di shape index. Lo score finale si ottiene correlando i valore di shape index tra i due set di punti di controllo e la distanza ottenuta dall algoritmo ICP, normalizzando opportunamente i valori e usando la regola della somma per la fusione. d 2 i i 53 Risultati sperimentali: database 54 Training scans for 3D model construction Test scans 100 modelli 3D Scansioni del volto multi-view Espressioni del volto variabili (es. sorriso) 598 immagini 2.5D di test
28 55 Risultati sperimentali Immagini di test (con espressione variabile e dati mancanti) Categoria immagine di test Accuratezza Frontale, espressione naturale (99) 98% (2) Profilo, espressione naturale (213) 97% (7) Frontale, sorridente (98) 71% (28) Profilo, sorridente (188) 78% (41) Accuratezza complessiva 87% Correct Matches Test scans (top row), and the corresponding 3D models correctly matched. The 3D model is shown in a pose similar to the corresponding test scan
29 Matching Errors Test scans (top row), and the corresponding 3D models. The 3D model is shown in a pose similar to the corresponding test scan 58

, ma il riconoscimento è molto efficiente poiché basato su immagini 2D. A. Franco, D.")
30 59 Riconoscimento 3D-2D Idea di base: Usare il modello 3D solo in fase di training per la generazione di immagini del volto con pose e illuminazioni variabili. Il riconoscimento avviene solo sulla base di immagini 2D. Vantaggi: L uso del modello 3D in fase di training permette la creazione di un template molto robusto. Il riconoscimento è basato su semplici immagini 2D che non richiedono particolari apparecchiature di acquisizione. La creazione del template degli utenti ha una complessità elevata (confrontabile con quella di altri metodi 3D), ma il riconoscimento è molto efficiente poiché basato su immagini 2D. A. Franco, D. Maio, D. Maltoni, 2D Face Recognition based on Supervised Subspace Learning from 3D Models, Pattern Recognition, vol.41, no.12, pp , Enrollment Generazione di immagini 2D virtuali Partizionamento delle immagini virtuali Acquisizione di 3 immagini 2D e creazione del modello 3D Creazione sottospazi KL Estrazione di feature
31 61 Riconoscimento Acquisizione di una singola immagine 2D Riconoscimento in base alla minima distanza dallo spazio Estrazione di feature { Iα, β, γ, i = 1,..., npo, j = 1,..., npv, k = 1,..., nlo, l = 1,..., nlv} I = i j k θl 62 Generazione delle immagini virtuali (1) La generazione delle immagini virtuali è controllata da 4 parametri: Posa: Yaw e Pitch Illuminazione: Azimuth e Zenith Per ogni individuo viene generato un insieme di immagini I variando con passo discreto i 4 parametri. z r Yaw Zenith y Pitch Azimuth x
32 { Iα, β, γ, i = 1,..., npo, j = 1,..., npv, k = 1,..., nlo, l = 1,..., nlv} I = i j k θl 63 Generazione delle immagini virtuali (2) L insieme di immagini di training generate è: I { I i = 1,..., npo, j = 1,..., npv, k = 1,..., nlo, l 1,..., nlv} = α, β, γ, θ = i j k l I parametri α e β controllano le variazioni di posa e rappresentano rispettivamente i valori di Yaw e Pitch. npo e npv indicano rispettivamente il numero di angoli considerati per Yaw e Pitch. i parametri γ e θ controllano le variazioni di illuminazione e rappresentano rispettivamente i valori di Azimuth e Zenith. nlo e nlv indicano rispettivamente il numero di angoli considerati per Azimuth e Zenith. Un generico angolo α i,i=2,...,npo, è dato da αi = α1 + ( i 1) α dove α è il passo d incremento. { Iα, β, γ, i = 1,..., npo, j = 1,..., npv, k = 1,..., nlo, l = 1,..., nlv} I = i j k θl 64 Definizione dei sottoinsiemi di immagini Le immagini di training vengono organizzate in s sottoinsiemi (non necessariamente disgiunti): P po, pv, lo, lv = X α, β, γ, θ i j k l i = po,..., po + d 1, j = pv,..., pv + d 1, k = lo,..., lo + d 1, l = lv,..., lv + d 1 po [ 1,..., npo d + 1] pv [ 1,..., npv d + 1] lo [ 1,..., nlo d + 1] lv [ 1,..., nlv d + 1] dove d rappresenta il numero di pose/illuminazioni consecutive considerate. nlv lv+d-1 lv d= lo lo+d-1 nlo
33 65 I sottoinsiemi Il numero totale di sottoinsiemi per ogni soggetto è determinato dal parametro d e dalla sovrapposizione (ov) tra sottoinsiemi adiacenti: s = npo d ov ov npv d ov ov nlo d ov ov nlv d ov ov 66 Prove sperimentali: database MIT-CBCL 59 immagini 2D a elevata risoluzione, alcune delle quali usate per la creazione dei modelli 3D immagini 2D virtuali (324 per ogni individuo) generate dai modelli 3D immagini 2D di test, con notevoli cambiamenti di posa, scala e illuminazione. Per la localizzazione del volto è stato usato il localizzatore di Viola/Jones.
34 67 Risultati sperimentali k KL_2D MKLU_2D KL_3D MKLU_3D MKLS_3D ,0010 0,0100 0,1000 1,0000 KL_2D MKLU_2D KL_3D MKLU_3D MKLS_3D FAR FRR 1,000 0,100 0,010 Accuratezza Curva DET 68 Prove sperimentali ID RR EER Immagini di test acquisite 6 mesi dopo il training
Processo di rendering
 Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
Processo di rendering Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione 2 Rendering nello spazio 2D Il processo di rendering (visualizzazione)
3DE Modeling Color. E il modulo che si occupa della costruzione di modelli 3D con tessitura a colori.
 3DE Modeling Color E il modulo che si occupa della costruzione di modelli 3D con tessitura a colori. E spesso necessario che alle informazioni geometriche di forma siano abbinate informazioni di colore
3DE Modeling Color E il modulo che si occupa della costruzione di modelli 3D con tessitura a colori. E spesso necessario che alle informazioni geometriche di forma siano abbinate informazioni di colore
Librerie digitali. Video. Gestione di video. Caratteristiche dei video. Video. Metadati associati ai video. Metadati associati ai video
 Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
Video Librerie digitali Gestione di video Ogni filmato è composto da più parti Video Audio Gestito come visto in precedenza Trascrizione del testo, identificazione di informazioni di interesse Testo Utile
3DE Modeling Professional
 3DE Modeling Professional 3DE Modeling Professional è la parte di 3DE Modeling Suite che si occupa della modellazione 3D automatica di oggetti ed edifici a partire da nuvole di punti ottenute con scanner
3DE Modeling Professional 3DE Modeling Professional è la parte di 3DE Modeling Suite che si occupa della modellazione 3D automatica di oggetti ed edifici a partire da nuvole di punti ottenute con scanner
Martina Agazzi. Corso di Tecniche plastiche contemporanee. Prof. Carlo Lanzi
 Martina Agazzi Corso di Tecniche plastiche contemporanee Prof. Carlo Lanzi RILEVAMENTO 3D DI UN OGGETTO ARTISTICO (SCULTURA) Luce strutturata Dispositivo portatile, facilmente trasportabile digitalizzazione
Martina Agazzi Corso di Tecniche plastiche contemporanee Prof. Carlo Lanzi RILEVAMENTO 3D DI UN OGGETTO ARTISTICO (SCULTURA) Luce strutturata Dispositivo portatile, facilmente trasportabile digitalizzazione
IMMAGINE BITMAP E VETTORIALI
 BITMAP VETTORIALE VETTORIALE BITMAP IMMAGINE BITMAP è una immagine costituita da una matrice di Pixel. PIXEL (picture element) indica ciascuno degli elementi puntiformi che compongono la rappresentazione
BITMAP VETTORIALE VETTORIALE BITMAP IMMAGINE BITMAP è una immagine costituita da una matrice di Pixel. PIXEL (picture element) indica ciascuno degli elementi puntiformi che compongono la rappresentazione
Capitolo V : Il colore nelle immagini digitali
 Capitolo V : Il colore nelle immagini digitali Lavorare con il colore nelle immagini digitali L uso dei colori nella visione computerizzata e nella computer grafica implica l incorrere in determinate problematiche
Capitolo V : Il colore nelle immagini digitali Lavorare con il colore nelle immagini digitali L uso dei colori nella visione computerizzata e nella computer grafica implica l incorrere in determinate problematiche
IsoStereo 3D: il sistema generale ed automatizzato per ricostruzione tridimensionale
 IsoStereo 3D: il sistema generale ed automatizzato per ricostruzione tridimensionale Isomorph srl, Giugno 2008 Caratteristiche del programma: IsoStereo 3D elabora immagini stereoscopiche e ricostruisce
IsoStereo 3D: il sistema generale ed automatizzato per ricostruzione tridimensionale Isomorph srl, Giugno 2008 Caratteristiche del programma: IsoStereo 3D elabora immagini stereoscopiche e ricostruisce
IL LASER SCANNER E IL TERRITORIO: applicazioni, metodologie operative, potenzialità del rilevamento con laser-scanner terrestre
 INN.TEC. srl Consorzio per l Innovazione Tecnologica Università degli Studi di Brescia IL LASER SCANNER E IL TERRITORIO: applicazioni, metodologie operative, potenzialità del rilevamento con laser-scanner
INN.TEC. srl Consorzio per l Innovazione Tecnologica Università degli Studi di Brescia IL LASER SCANNER E IL TERRITORIO: applicazioni, metodologie operative, potenzialità del rilevamento con laser-scanner
Applicazioni 3D avanzate
 Azienda Ospedaliera Card. G. Panico Applicazioni 3D avanzate VR e segmentazione delle articolazioni: campi applicativi Indice Applicazioni 3D avanzate Articolazioni e grandi macchine 1. Definizioni 2.
Azienda Ospedaliera Card. G. Panico Applicazioni 3D avanzate VR e segmentazione delle articolazioni: campi applicativi Indice Applicazioni 3D avanzate Articolazioni e grandi macchine 1. Definizioni 2.
3DEverywhere S.r.l. sito web: http://www.3deverywhere.com
 3DE Modeling Analyzer 3DE Modeling Analyzer permette di effettuare un'analisi accurata dei modelli ottenuti con 3DE Modeling Professional. 3DE Modeling Analyzer consente: il caricamento di singole viste
3DE Modeling Analyzer 3DE Modeling Analyzer permette di effettuare un'analisi accurata dei modelli ottenuti con 3DE Modeling Professional. 3DE Modeling Analyzer consente: il caricamento di singole viste
IL RILIEVO TOPOGRAFICO CON LASER SCANNER
 IL RILIEVO TOPOGRAFICO CON LASER SCANNER fb.m. s.r.l. 1 Il continuo sviluppo della tecnica di rilievo e la ricerca continua del miglior risultato ore-lavoro, ha prodotto la strumentazione per il rilievo
IL RILIEVO TOPOGRAFICO CON LASER SCANNER fb.m. s.r.l. 1 Il continuo sviluppo della tecnica di rilievo e la ricerca continua del miglior risultato ore-lavoro, ha prodotto la strumentazione per il rilievo
Immagini vettoriali. Immagini raster
 Immagini vettoriali Le immagini vettoriali sono caratterizzate da linee e curve definite da entità matematiche chiamate vettori. I vettori sono segmenti definiti da un punto di origine, una direzione e
Immagini vettoriali Le immagini vettoriali sono caratterizzate da linee e curve definite da entità matematiche chiamate vettori. I vettori sono segmenti definiti da un punto di origine, una direzione e
Luci/Ombre. YAFARAY motore di rendering Open Source. Federico Frittelli aka fredfrittella. SUTURA-studio di progettazione.
 Luci/Ombre YAFARAY motore di rendering Open Source Federico Frittelli aka fredfrittella SUTURA-studio di progettazione LinuxDay, 2010 fredfrittella (SUTURA-studio di progettazione) Luci/Ombre 23 Ottobre
Luci/Ombre YAFARAY motore di rendering Open Source Federico Frittelli aka fredfrittella SUTURA-studio di progettazione LinuxDay, 2010 fredfrittella (SUTURA-studio di progettazione) Luci/Ombre 23 Ottobre
RETTE, PIANI, SFERE, CIRCONFERENZE
 RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
RETTE, PIANI, SFERE, CIRCONFERENZE 1. Esercizi Esercizio 1. Dati i punti A(1, 0, 1) e B(, 1, 1) trovare (1) la loro distanza; () il punto medio del segmento AB; (3) la retta AB sia in forma parametrica,
Ricostruzione stereo. Il nostro obiettivo. Ricostruzione del Cenacolo Vinciano. Ricostruire la profondità. d Y
 Il nostro obiettivo Daniele Marini Ricostruzione stereo Ricostruire scenari 3D da più immagini per inserire oggetti di sintesi Ricostruire la profondità Ricostruzione del Cenacolo Vinciano Solo se abbiamo
Il nostro obiettivo Daniele Marini Ricostruzione stereo Ricostruire scenari 3D da più immagini per inserire oggetti di sintesi Ricostruire la profondità Ricostruzione del Cenacolo Vinciano Solo se abbiamo
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Una immagine (digitale) permette di percepire solo una rappresentazione 2D del mondo La visione 3D si pone lo scopo di percepire il mondo per come è in 3 dimensioni
Le immagini digitali. Le immagini digitali. Caterina Balletti. Caterina Balletti. Immagini grafiche. Trattamento di immagini digitali.
 1 Le immagini digitali Le immagini digitali Università IUAV di venezia Trattamento di immagini digitali immagini grafiche immagini raster immagini vettoriali acquisizione trattamento geometrico trattamento
1 Le immagini digitali Le immagini digitali Università IUAV di venezia Trattamento di immagini digitali immagini grafiche immagini raster immagini vettoriali acquisizione trattamento geometrico trattamento
Un prototipo di 3D scanner
 Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Un prototipo di 3D scanner Visual Computing Group 1999 Visual Computing Group 1 Obiettivi Progettazione e realizzazione di uno 3d scanner a basso costo, a partire da hardware comune: una foto camera /
Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei patrimoni
 CONVEGNO FACILITY MANAGEMENT: LA GESTIONE INTEGRATA DEI PATRIMONI PUBBLICI GENOVA FACOLTA DI ARCHITETTURA 06.07.2010 Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei
CONVEGNO FACILITY MANAGEMENT: LA GESTIONE INTEGRATA DEI PATRIMONI PUBBLICI GENOVA FACOLTA DI ARCHITETTURA 06.07.2010 Le strumentazioni laser scanning oriented per i processi di censimento anagrafico dei
Sistema di ripresa con fotocamera digitale fissa Calibrazione
 Sistema di ripresa con fotocamera digitale fissa Calibrazione TUTORIAL CALIBRAZIONE FOTOCAMERA Sommario 1. Interfacciamento PC... 3 2. Collocamento fotocamera... 4 3. Distanza di ripresa... 5 4. Interfacciamento
Sistema di ripresa con fotocamera digitale fissa Calibrazione TUTORIAL CALIBRAZIONE FOTOCAMERA Sommario 1. Interfacciamento PC... 3 2. Collocamento fotocamera... 4 3. Distanza di ripresa... 5 4. Interfacciamento
ELABORAZIONE DI DATI TRIDIMENSIONALI - RELAZIONE HOMEWORK 2
 DAVIDE ZANIN 1035601 ELABORAZIONE DI DATI TRIDIMENSIONALI - RELAZIONE HOMEWORK 2 SOMMARIO Elaborazione di dati tridimensionali - Relazione Homework 2... 1 Obiettivo... 2 Descrizione della procedura seguita...
DAVIDE ZANIN 1035601 ELABORAZIONE DI DATI TRIDIMENSIONALI - RELAZIONE HOMEWORK 2 SOMMARIO Elaborazione di dati tridimensionali - Relazione Homework 2... 1 Obiettivo... 2 Descrizione della procedura seguita...
Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine
 Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine di Philip Cheng Per molti anni la camera a pellicola aerotrasportata è stata la miglior scelta per l acquisizione di foto
Correzione di immagini da camera Vexcel UltraCam utilizzando Geomatica OrthoEngine di Philip Cheng Per molti anni la camera a pellicola aerotrasportata è stata la miglior scelta per l acquisizione di foto
Il campionamento. La digitalizzazione. Teoria e pratica. La rappresentazione digitale delle immagini. La rappresentazione digitale delle immagini
 ACQUISIZIONE ED ELABORAZIONE DELLE IMMAGINI Teoria e pratica La digitalizzazione La digitalizzazione di oggetti legati a fenomeni di tipo analogico, avviene attraverso due parametri fondamentali: Il numero
ACQUISIZIONE ED ELABORAZIONE DELLE IMMAGINI Teoria e pratica La digitalizzazione La digitalizzazione di oggetti legati a fenomeni di tipo analogico, avviene attraverso due parametri fondamentali: Il numero
4. Proiezioni del piano e dello spazio
 4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
4. Proiezioni del piano e dello spazio La visualizzazione di oggetti tridimensionali richiede di ottenere una vista piana dell'oggetto. Questo avviene mediante una sequenza di operazioni. Innanzitutto,
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Multimedia. Creazione di Modelli 3D usando ARC3D
 Multimedia Creazione di Modelli 3D usando ARC3D - The 3D models are created by the ARC 3D webservice, developed by the VISICS research group of the KULeuven in Belgium - Presentazione a cura di Filippo
Multimedia Creazione di Modelli 3D usando ARC3D - The 3D models are created by the ARC 3D webservice, developed by the VISICS research group of the KULeuven in Belgium - Presentazione a cura di Filippo
Le ombre in OpenGl. Daniele Varin LS Ing. Informatica Corso di Elementi di Grafica Digitale http://varindaniele.altervista.org
 Le ombre in OpenGl Daniele Varin LS Ing. Informatica Corso di Elementi di Grafica Digitale http://varindaniele.altervista.org Punto di partenza In OpenGl le luci non proiettano ombre 2 Perché si introducono
Le ombre in OpenGl Daniele Varin LS Ing. Informatica Corso di Elementi di Grafica Digitale http://varindaniele.altervista.org Punto di partenza In OpenGl le luci non proiettano ombre 2 Perché si introducono
PointCloud 7.0 Anno 2011
 PointCloud 7.0 Anno 2011 Compatibilità con AutoCAD 2007-2012 ed AutoCAD 2007-2012 Supporto del formato nativo delle nuvole di punti di AutoCAD (PCG) e miglioramento delle performance riguardo la velocità
PointCloud 7.0 Anno 2011 Compatibilità con AutoCAD 2007-2012 ed AutoCAD 2007-2012 Supporto del formato nativo delle nuvole di punti di AutoCAD (PCG) e miglioramento delle performance riguardo la velocità
UNIVERSITÀ DEGLI STUDI GUGLIELMO MARCONI
 UNIVERSITÀ DEGLI STUDI GUGLIELMO MARCONI FACOLTÀ DI SCIENZE E TECNOLOGIE APPLICATE CORSO DI LAUREA IN SCIENZE GEO-CARTOGRAFICHE, ESTIMATIVE ED EDILIZIE TECNICHE DI MODELLAZIONE 3D A PARTIRE DA DATI RILEVATI
UNIVERSITÀ DEGLI STUDI GUGLIELMO MARCONI FACOLTÀ DI SCIENZE E TECNOLOGIE APPLICATE CORSO DI LAUREA IN SCIENZE GEO-CARTOGRAFICHE, ESTIMATIVE ED EDILIZIE TECNICHE DI MODELLAZIONE 3D A PARTIRE DA DATI RILEVATI
Sistema automatico di acquisizione e modellazione 3D a basso costo
 Sistema automatico di acquisizione e modellazione 3D a basso costo Titolo progetto Unità di Brescia Sviluppo, realizzazione e caratterizzazione metrologica di digitalizzatore a basso costo basato su proiezione
Sistema automatico di acquisizione e modellazione 3D a basso costo Titolo progetto Unità di Brescia Sviluppo, realizzazione e caratterizzazione metrologica di digitalizzatore a basso costo basato su proiezione
La Visione Artificiale. La vis ione delle macchine La vis ione umana Acquis izione di immag ine
 La Visione Artificiale La vis ione delle macchine La vis ione umana Acquis izione di immag ine Copyright Alcune slide sono tratte dal testo: Digital Image Processing Materiale didattico relativo si trova
La Visione Artificiale La vis ione delle macchine La vis ione umana Acquis izione di immag ine Copyright Alcune slide sono tratte dal testo: Digital Image Processing Materiale didattico relativo si trova
TRASFORMAZIONI GEOMETRICHE NEL PIANO. Parte 1
 TRASFORMAZIONI GEOMETRICHE NEL PIANO Parte 1 La geometria è la scienza che studia la forma e l estensione dei corpi e le trasformazioni che questi possono subire. In generale per trasformazione geometrica
TRASFORMAZIONI GEOMETRICHE NEL PIANO Parte 1 La geometria è la scienza che studia la forma e l estensione dei corpi e le trasformazioni che questi possono subire. In generale per trasformazione geometrica
gestione e modifica di immagini fotografiche digitali
 gestione e modifica di immagini fotografiche digitali il colore e le immagini la gestione delle immagini Il computer è in grado di gestire le immagini in formato digitale. Gestire vuol dire acquisirle,
gestione e modifica di immagini fotografiche digitali il colore e le immagini la gestione delle immagini Il computer è in grado di gestire le immagini in formato digitale. Gestire vuol dire acquisirle,
RILIEVO CON TECNOLOGIA LASER SCANNER
 RILIEVO CON TECNOLOGIA LASER SCANNER LA SCANSIONE LASER 3D CONSENTE DI PENSARE IN UN MODO NUOVO ALLE ATTIVITA DI ACQUISIZIONE, ANALISI ED ARCHIVIAZIONE DATI, INDIPENDENTEMENTE DAL SETTORE APPLICATIVO IN
RILIEVO CON TECNOLOGIA LASER SCANNER LA SCANSIONE LASER 3D CONSENTE DI PENSARE IN UN MODO NUOVO ALLE ATTIVITA DI ACQUISIZIONE, ANALISI ED ARCHIVIAZIONE DATI, INDIPENDENTEMENTE DAL SETTORE APPLICATIVO IN
Capitolo 1 La misura di entità geometriche 1. 1.1 Interazione tra misuratore e misurato...1
 Libro_v11b.pdf 9-09-2009 16:34:44-1 - ( ) Indice Capitolo 1 La misura di entità geometriche 1 1.1 Interazione tra misuratore e misurato...1 1.2 Natura della luce...3 Teoria corpuscolare della luce...3
Libro_v11b.pdf 9-09-2009 16:34:44-1 - ( ) Indice Capitolo 1 La misura di entità geometriche 1 1.1 Interazione tra misuratore e misurato...1 1.2 Natura della luce...3 Teoria corpuscolare della luce...3
3DCARTO: GESTIONE DEL MONDO VIRTUALE IN 3D
 3DCARTO: GESTIONE DEL MONDO VIRTUALE IN 3D La base di partenza per la creazione del mondo virtuale è l aerofotogrammetria e/o I rilievi fotografici con scansioni laser. Il prodotto così ottenuto, è lo
3DCARTO: GESTIONE DEL MONDO VIRTUALE IN 3D La base di partenza per la creazione del mondo virtuale è l aerofotogrammetria e/o I rilievi fotografici con scansioni laser. Il prodotto così ottenuto, è lo
DETERMINAZIONE DI V S30 ReMi software
 DETERMINAZIONE DI V S30 ReMi software Il calcolo di questo parametro dinamico può essere effettuato attraverso le classiche prove sismiche in foro del tipo DOWN-HOLE oppure con metodi innovativi indiretti.
DETERMINAZIONE DI V S30 ReMi software Il calcolo di questo parametro dinamico può essere effettuato attraverso le classiche prove sismiche in foro del tipo DOWN-HOLE oppure con metodi innovativi indiretti.
Verifica delle tolleranze attraverso Reverse Engineering: sviluppo di algoritmi per l'analisi di superfici cilindriche
 Laurea Magistrale in Ingegneria Meccanica aa 13-14 Verifica delle tolleranze attraverso Reverse Engineering: sviluppo di algoritmi per l'analisi di superfici cilindriche Candidato: Alessio Trifirò Relatore:
Laurea Magistrale in Ingegneria Meccanica aa 13-14 Verifica delle tolleranze attraverso Reverse Engineering: sviluppo di algoritmi per l'analisi di superfici cilindriche Candidato: Alessio Trifirò Relatore:
Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE. Operare con i numeri
 COMPETENZA CHIAVE MATEMATICA Fonte di legittimazione Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE L alunno utilizza il calcolo scritto e mentale con i numeri
COMPETENZA CHIAVE MATEMATICA Fonte di legittimazione Raccomandazione del Parlamento europeo 18/12/2006 CLASSE PRIMA COMPETENZE ABILITÀ CONOSCENZE L alunno utilizza il calcolo scritto e mentale con i numeri
Interazione luce - materia
 Interazione luce - materia 1 Modelli di illuminazione Il modello di illuminazione descrive l interazione tra la luce e gli oggetti della scena Descrive i fattori che determinano il colore di un punto della
Interazione luce - materia 1 Modelli di illuminazione Il modello di illuminazione descrive l interazione tra la luce e gli oggetti della scena Descrive i fattori che determinano il colore di un punto della
Principi e Metodologie della Progettazione Meccanica
 Principi e Metodologie della Progettazione Meccanica Corso del II anno della laurea magistrale in ingegneria meccanica ing. F. Campana Modellazione di superfici: introduzione Curve parametriche di Hermite
Principi e Metodologie della Progettazione Meccanica Corso del II anno della laurea magistrale in ingegneria meccanica ing. F. Campana Modellazione di superfici: introduzione Curve parametriche di Hermite
Trasformazioni Geometriche 1 Roberto Petroni, 2011
 1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
1 Trasformazioni Geometriche 1 Roberto etroni, 2011 Trasformazioni Geometriche sul piano euclideo 1) Introduzione Def: si dice trasformazione geometrica una corrispondenza biunivoca che associa ad ogni
Corso di Visione Artificiale. Stereopsi. Samuel Rota Bulò
 Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Corso di Visione Artificiale Stereopsi Samuel Rota Bulò Introduzione La stereopsi è il processo di inferenza della struttura 3D da una coppia di immagini di una stessa scena catturate da posizioni diverse.
Algoritmi di clustering
 Algoritmi di clustering Dato un insieme di dati sperimentali, vogliamo dividerli in clusters in modo che: I dati all interno di ciascun cluster siano simili tra loro Ciascun dato appartenga a uno e un
Algoritmi di clustering Dato un insieme di dati sperimentali, vogliamo dividerli in clusters in modo che: I dati all interno di ciascun cluster siano simili tra loro Ciascun dato appartenga a uno e un
3D e Realtà Virtuale
 3D e Realtà Virtuale Modello 3D La costruzione di un modello 3D, così come la realizzazione di un plastico tradizionale, necessita di grande precisione e attenzione conoscitiva. Tale modello convoglia
3D e Realtà Virtuale Modello 3D La costruzione di un modello 3D, così come la realizzazione di un plastico tradizionale, necessita di grande precisione e attenzione conoscitiva. Tale modello convoglia
Ricerca di outlier. Ricerca di Anomalie/Outlier
 Ricerca di outlier Prof. Matteo Golfarelli Alma Mater Studiorum - Università di Bologna Ricerca di Anomalie/Outlier Cosa sono gli outlier? L insieme di dati che sono considerevolmente differenti dalla
Ricerca di outlier Prof. Matteo Golfarelli Alma Mater Studiorum - Università di Bologna Ricerca di Anomalie/Outlier Cosa sono gli outlier? L insieme di dati che sono considerevolmente differenti dalla
Database. Si ringrazia Marco Bertini per le slides
 Database Si ringrazia Marco Bertini per le slides Obiettivo Concetti base dati e informazioni cos è un database terminologia Modelli organizzativi flat file database relazionali Principi e linee guida
Database Si ringrazia Marco Bertini per le slides Obiettivo Concetti base dati e informazioni cos è un database terminologia Modelli organizzativi flat file database relazionali Principi e linee guida
Processo di rendering
 Processo di rendering 1 Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione I parametri della vista 3D I sistemi di coordinate 2 I parametri
Processo di rendering 1 Trasformazioni di vista Trasformazioni di vista Il processo di visione in tre dimensioni Le trasformazioni di proiezione I parametri della vista 3D I sistemi di coordinate 2 I parametri
UNIVERSITÀ DEGLI STUDI DI SIENA
 UNIVERSITÀ DEGLI STUDI DI SIENA FACOLTÀ DI INGEGNERIA Corso di Laurea Specialistica in Ingegneria Informatica, orientamento Robotica ed Automazione Tesi di Laurea Interazione Visuo-Aptica con Oggetti Deformabili
UNIVERSITÀ DEGLI STUDI DI SIENA FACOLTÀ DI INGEGNERIA Corso di Laurea Specialistica in Ingegneria Informatica, orientamento Robotica ed Automazione Tesi di Laurea Interazione Visuo-Aptica con Oggetti Deformabili
Sommario DEL BUON USO DEGLI STRUMENTI 10 2 UNA PIPELINE PER L'ACQUISIZIONE DI DATI 3D 38 3 IL PROGETTO DEL RILIEVO 64~ 1 INTRODUZIONE 16~
 Sommario DEL BUON USO DEGLI STRUMENTI 10 Pier Giovanni Guzzo 1 INTRODUZIONE 16~ Benedetto Benedetti, Marco Galani, Fabio Remondino 1.1 II contesto 20_ 1.2 Un framework per la ceazione e l'utilizzo di modelli
Sommario DEL BUON USO DEGLI STRUMENTI 10 Pier Giovanni Guzzo 1 INTRODUZIONE 16~ Benedetto Benedetti, Marco Galani, Fabio Remondino 1.1 II contesto 20_ 1.2 Un framework per la ceazione e l'utilizzo di modelli
Corso SIRI 2014. Dott. Ing. Stefano Tonello
 Corso SIRI 2014 Dott. Ing. Stefano Tonello IT+Robotics Spin-off dell Università di Padova fondata nel 2005 IAS-LAB (Intelligent and Autonomous Systems Laboratory) Attiva nei campi della robotica e visione
Corso SIRI 2014 Dott. Ing. Stefano Tonello IT+Robotics Spin-off dell Università di Padova fondata nel 2005 IAS-LAB (Intelligent and Autonomous Systems Laboratory) Attiva nei campi della robotica e visione
Le texture. Informatica Grafica I. Le texture. Le texture. Le texture. Le texture. Le texture
 Informatica Grafica I Per rendere realistici gli oggetti modellati occorre definire accuratamente l'aspetto delle loro superfici. Il modo piu' semplice consiste nel sovrapporre immagini alle superfici.
Informatica Grafica I Per rendere realistici gli oggetti modellati occorre definire accuratamente l'aspetto delle loro superfici. Il modo piu' semplice consiste nel sovrapporre immagini alle superfici.
Morphological Image processing
 Morphological Image processing Morfologia matematica La parola morfologia comunemente denota una parte della biologia che tratta con la forma e la struttura di organismi In analogia al termine biologico
Morphological Image processing Morfologia matematica La parola morfologia comunemente denota una parte della biologia che tratta con la forma e la struttura di organismi In analogia al termine biologico
SCHEDA M MOSAICI CLASSIFICARE CON LA SIMMETRIA
 SCHEDA M MOSAICI CLASSIFICARE CON LA SIMMETRIA Qui sotto avete una griglia, che rappresenta una normale quadrettatura, come quella dei quaderni a quadretti; nelle attività che seguono dovrete immaginare
SCHEDA M MOSAICI CLASSIFICARE CON LA SIMMETRIA Qui sotto avete una griglia, che rappresenta una normale quadrettatura, come quella dei quaderni a quadretti; nelle attività che seguono dovrete immaginare
Corso di Grafica Computazionale
 Corso di Grafica Computazionale Premesse Teoriche Docente: Massimiliano Corsini Laurea Specialistica in Ing. Informatica Università degli Studi di Siena Overview Premesse Teoriche Mini-ripasso geometria
Corso di Grafica Computazionale Premesse Teoriche Docente: Massimiliano Corsini Laurea Specialistica in Ing. Informatica Università degli Studi di Siena Overview Premesse Teoriche Mini-ripasso geometria
Claudio Gussini Programma dei Corsi I e II Livello
 Claudio Gussini Programma dei Corsi I e II Livello Livello I - Modellazione Base - In questi primi tre giorni di corso, gli allievi impareranno a disegnare e modificare accuratamente modelli in NURBS-3D.
Claudio Gussini Programma dei Corsi I e II Livello Livello I - Modellazione Base - In questi primi tre giorni di corso, gli allievi impareranno a disegnare e modificare accuratamente modelli in NURBS-3D.
3D Scanning. Multimedia
 3D Scanning 3D Scanning Di cosa si tratta? Si vuole campionare, attraverso una nuvola di punti (point cloud), la superficie dell oggetto / soggetto. Cosa si fa con la nuvola di punti? (Quali applicazioni)
3D Scanning 3D Scanning Di cosa si tratta? Si vuole campionare, attraverso una nuvola di punti (point cloud), la superficie dell oggetto / soggetto. Cosa si fa con la nuvola di punti? (Quali applicazioni)
Sistemi Operativi. 5 Gestione della memoria
 Gestione della memoria Compiti del gestore della memoria: Tenere traccia di quali parti della memoria sono libere e quali occupate. Allocare memoria ai processi che ne hanno bisogno. Deallocare la memoria
Gestione della memoria Compiti del gestore della memoria: Tenere traccia di quali parti della memoria sono libere e quali occupate. Allocare memoria ai processi che ne hanno bisogno. Deallocare la memoria
PROGETTO ESCAVATORE VIRTUALE
 PROGETTO ESCAVATORE VIRTUALE Facoltà di Ingegneria Industriale Corso di Laurea in Ingegneria Meccanica Anno Accademico 2011-2012 Matteo Condoleo 1 OBBIETTIVI Il presente progetto è stato realizzato per
PROGETTO ESCAVATORE VIRTUALE Facoltà di Ingegneria Industriale Corso di Laurea in Ingegneria Meccanica Anno Accademico 2011-2012 Matteo Condoleo 1 OBBIETTIVI Il presente progetto è stato realizzato per
HDS Software Technodigit 3D Reshaper Caratteristiche e benefici
 HDS Software Technodigit 3D Reshaper Caratteristiche e benefici Software dedicato alla modellazione 3D mesh di nuvole di punti provenienti da qualunque tipo di hardware (laser scanner terrestri, CMM bracci
HDS Software Technodigit 3D Reshaper Caratteristiche e benefici Software dedicato alla modellazione 3D mesh di nuvole di punti provenienti da qualunque tipo di hardware (laser scanner terrestri, CMM bracci
COMUNE DI RAVENNA GUIDA ALLA VALUTAZIONE DELLE POSIZIONI (FAMIGLIE, FATTORI, LIVELLI)
") COMUNE DI RAVENNA Il sistema di valutazione delle posizioni del personale dirigente GUIDA ALLA VALUTAZIONE DELLE POSIZIONI (FAMIGLIE, FATTORI, LIVELLI) Ravenna, Settembre 2004 SCHEMA DI SINTESI PER LA
COMUNE DI RAVENNA Il sistema di valutazione delle posizioni del personale dirigente GUIDA ALLA VALUTAZIONE DELLE POSIZIONI (FAMIGLIE, FATTORI, LIVELLI) Ravenna, Settembre 2004 SCHEMA DI SINTESI PER LA
APPUNTI DI MATEMATICA GEOMETRIA \ GEOMETRIA EUCLIDEA \ GEOMETRIA DEL PIANO (1)
") GEOMETRIA \ GEOMETRIA EUCLIDEA \ GEOMETRIA DEL PIANO (1) Un ente (geometrico) è un oggetto studiato dalla geometria. Per descrivere gli enti vengono utilizzate delle definizioni. Una definizione è una
GEOMETRIA \ GEOMETRIA EUCLIDEA \ GEOMETRIA DEL PIANO (1) Un ente (geometrico) è un oggetto studiato dalla geometria. Per descrivere gli enti vengono utilizzate delle definizioni. Una definizione è una
Computer Graphics. La disciplina fornisce metodi per creare elaborare memorizzare visualizzare. immagini di oggetti o scene mediante un computer
 Computer Graphics La disciplina fornisce metodi per creare elaborare memorizzare visualizzare immagini di oggetti o scene mediante un computer Image Processing La disciplina fornisce metodi per acquisire
Computer Graphics La disciplina fornisce metodi per creare elaborare memorizzare visualizzare immagini di oggetti o scene mediante un computer Image Processing La disciplina fornisce metodi per acquisire
RILIEVO E MODELLAZIONE 3D PER I BENI CULTURALI
 RILIEVO E MODELLAZIONE 3D PER I BENI CULTURALI PERCHE' 3D? Documentazione e analisi di contesti archeologici Conservazione digitale e tutela Divulgazione (filmati / realtà virtuale) GIS RILIEVO 3D Misura
RILIEVO E MODELLAZIONE 3D PER I BENI CULTURALI PERCHE' 3D? Documentazione e analisi di contesti archeologici Conservazione digitale e tutela Divulgazione (filmati / realtà virtuale) GIS RILIEVO 3D Misura
Rappresentazione di oggetti 3D
 Rappresentazione di oggetti 3D 1 Modellazione geometrica La modellazione geometrica riguarda le tecniche di rappresentazione di curve e superfici Surface modeling Rappresentazione della superficie di un
Rappresentazione di oggetti 3D 1 Modellazione geometrica La modellazione geometrica riguarda le tecniche di rappresentazione di curve e superfici Surface modeling Rappresentazione della superficie di un
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2013-14. Pietro Frasca.
 Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2013-14 Pietro Frasca Lezione 11 Martedì 12-11-2013 1 Tecniche di allocazione mediante free list Generalmente,
Università di Roma Tor Vergata Corso di Laurea triennale in Informatica Sistemi operativi e reti A.A. 2013-14 Pietro Frasca Lezione 11 Martedì 12-11-2013 1 Tecniche di allocazione mediante free list Generalmente,
Introduzione. 001_007_pagine_iniziali.indd 7 22/01/14 11.21
 7 Introduzione Questo volume si propone di riorganizzare i percorsi di aritmetica e di geometria del corso principale adattandoli a studenti con esigenze specifiche. Il progetto grafico originale del corso
7 Introduzione Questo volume si propone di riorganizzare i percorsi di aritmetica e di geometria del corso principale adattandoli a studenti con esigenze specifiche. Il progetto grafico originale del corso
Dalla TOPOGRAFIA alla GEOMATICA
 SEMINARIO 2b Dalla TOPOGRAFIA alla GEOMATICA SCANSIONE LASER E RILIEVI PER IMMAGINI Paolo Aminti - Valentina Bonora - Andrea Lingua Fulvio Rinaudo - CS SIFET SOCIETA ITALIANA DI FOTOGRAMMETRIA E TOPOGRAFIA
SEMINARIO 2b Dalla TOPOGRAFIA alla GEOMATICA SCANSIONE LASER E RILIEVI PER IMMAGINI Paolo Aminti - Valentina Bonora - Andrea Lingua Fulvio Rinaudo - CS SIFET SOCIETA ITALIANA DI FOTOGRAMMETRIA E TOPOGRAFIA
Sistema Informativo Geografico:
 Sistemi Informativi Geografici Sistema Informativo Geografico: È un sistema informativo che tratta informazioni spaziali georeferenziate, ne consente la gestione e l'analisi. Informazioni spaziali: dati
Sistemi Informativi Geografici Sistema Informativo Geografico: È un sistema informativo che tratta informazioni spaziali georeferenziate, ne consente la gestione e l'analisi. Informazioni spaziali: dati
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Spline Nurbs. IUAV Disegno Digitale. Camillo Trevisan
 Spline Nurbs IUAV Disegno Digitale Camillo Trevisan Spline e Nurbs Negli anni 70 e 80 del secolo scorso nelle aziende si è iniziata a sentire l esigenza di concentrare in un unica rappresentazione gestita
Spline Nurbs IUAV Disegno Digitale Camillo Trevisan Spline e Nurbs Negli anni 70 e 80 del secolo scorso nelle aziende si è iniziata a sentire l esigenza di concentrare in un unica rappresentazione gestita
Presentazione acquisto nuova macchina Raggi -X. Chiusanico 03/03/15
 Presentazione acquisto nuova macchina Raggi -X Chiusanico 03/03/15 Macchina X-Ray attualmente presente in CLAS CLAS possiede attualmente una Eagle-Tall serie III Che, seppur datata (installazione nel 2003)
Presentazione acquisto nuova macchina Raggi -X Chiusanico 03/03/15 Macchina X-Ray attualmente presente in CLAS CLAS possiede attualmente una Eagle-Tall serie III Che, seppur datata (installazione nel 2003)
Funzioni funzione dominio codominio legge argomento variabile indipendente variabile dipendente
 Funzioni In matematica, una funzione f da X in Y consiste in: 1. un insieme X detto dominio di f 2. un insieme Y detto codominio di f 3. una legge che ad ogni elemento x in X associa uno ed un solo elemento
Funzioni In matematica, una funzione f da X in Y consiste in: 1. un insieme X detto dominio di f 2. un insieme Y detto codominio di f 3. una legge che ad ogni elemento x in X associa uno ed un solo elemento
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi.
 IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
IL RISPARMIO ENERGETICO E GLI AZIONAMENTI A VELOCITA VARIABILE L utilizzo dell inverter negli impianti frigoriferi. Negli ultimi anni, il concetto di risparmio energetico sta diventando di fondamentale
CONI, CILINDRI, SUPERFICI DI ROTAZIONE
 CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
CONI, CILINDRI, SUPERFICI DI ROTAZIONE. Esercizi x + z = Esercizio. Data la curva x, calcolare l equazione del cilindro avente γ y = 0 come direttrice e con generatrici parallele al vettore v = (, 0, ).
IR(3): Illuminazione Globale
: Illuminazione Globale") IR(3): Illuminazione Globale Alessandro Martinelli alessandro.martinelli@unipv.it 21 Dicembre 2011 IR(3): Illuminazione Globale Illuminazione e Rendering: Principi di Illuminazione Rendering Real-Time
IR(3): Illuminazione Globale Alessandro Martinelli alessandro.martinelli@unipv.it 21 Dicembre 2011 IR(3): Illuminazione Globale Illuminazione e Rendering: Principi di Illuminazione Rendering Real-Time
REVERSE ENGINEERING. Reverse Engineering 22/12/2008. paolo.magni@kaemart.it 1. Contenuto della lezione. Reverse Engineering
 Corso di Laboratorio Progettuale di Disegno Assistito da Calcolatore Knowledge Aided Engineering Manufacturing and Related Technologies REVERSE ENGINEERING Contenuto della lezione Metodologia Tecnologie
Corso di Laboratorio Progettuale di Disegno Assistito da Calcolatore Knowledge Aided Engineering Manufacturing and Related Technologies REVERSE ENGINEERING Contenuto della lezione Metodologia Tecnologie
LE TRASFORMAZIONI GEOMETRICHE NEL PIANO
 LE TRASFORMAZIONI GEOMETRICHE NEL PIANO Una trasformazione geometrica è una funzione che fa corrispondere a ogni punto del piano un altro punto del piano stesso Si può pensare come MOVIMENTO di punti e
LE TRASFORMAZIONI GEOMETRICHE NEL PIANO Una trasformazione geometrica è una funzione che fa corrispondere a ogni punto del piano un altro punto del piano stesso Si può pensare come MOVIMENTO di punti e
RILIEVO LASER SCANNER PARETE MARMOREA XXXXXXXXXXXXX
 RILIEVO LASER SCANNER PARETE MARMOREA XXXXXXXXXXXXXXXXXX PROVA n. 3651/XX Committente: Relatore: XXXXXXXXXXXXX ing. Georg Schiner Vista della parete di intarsio marmoreo XX/88/09/mt Bolzano, 9 Settembre
RILIEVO LASER SCANNER PARETE MARMOREA XXXXXXXXXXXXXXXXXX PROVA n. 3651/XX Committente: Relatore: XXXXXXXXXXXXX ing. Georg Schiner Vista della parete di intarsio marmoreo XX/88/09/mt Bolzano, 9 Settembre
SqueezeX. Macchina per il controllo dimensionale e dei difetti superficiali
 SqueezeX Macchina per il controllo dimensionale e dei difetti superficiali SqueezeX Macchina per il controllo dimensionale e dei difetti superficiali SQUEEZEX è una macchina d ispezione visiva per il
SqueezeX Macchina per il controllo dimensionale e dei difetti superficiali SqueezeX Macchina per il controllo dimensionale e dei difetti superficiali SQUEEZEX è una macchina d ispezione visiva per il
Produzione e collaudo di cartografia tecnica numerica verso i DB topografici
 Ufficio Cartografico Servizio Cartografia e Gis della Provincia di Brescia Produzione e collaudo di cartografia tecnica numerica verso i DB topografici Ing. Antonio Trebeschi L attività dell Ufficio Cartografico
Ufficio Cartografico Servizio Cartografia e Gis della Provincia di Brescia Produzione e collaudo di cartografia tecnica numerica verso i DB topografici Ing. Antonio Trebeschi L attività dell Ufficio Cartografico
Lezione 16: La luce strutturata
 Robotica A Lezione 16: La luce strutturata Modificare la luce per semplificare i calcoli Con una sola telecamera In generale, non si possono misurare le distanze. Non tutti gli oggetti possono essere assimilati
Robotica A Lezione 16: La luce strutturata Modificare la luce per semplificare i calcoli Con una sola telecamera In generale, non si possono misurare le distanze. Non tutti gli oggetti possono essere assimilati
Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione. Raffaele Cappelli raffaele.cappelli@unibo.it
 Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione Raffaele Cappelli raffaele.cappelli@unibo.it Contenuti Estrazione dei bordi Calcolo del gradiente Operatori di Roberts Operatori
Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione Raffaele Cappelli raffaele.cappelli@unibo.it Contenuti Estrazione dei bordi Calcolo del gradiente Operatori di Roberts Operatori
INFORMATICA E GRAFICA PER IL WEB
 INFORMATICA E GRAFICA PER IL WEB Psicologia e comunicazione A.A. 2013/2014 Università degli studi Milano-Bicocca docente: Diana Quarti INFORMATICA E GRAFICA PER IL WEB A.A. 2013/2014 docente: Diana Quarti
INFORMATICA E GRAFICA PER IL WEB Psicologia e comunicazione A.A. 2013/2014 Università degli studi Milano-Bicocca docente: Diana Quarti INFORMATICA E GRAFICA PER IL WEB A.A. 2013/2014 docente: Diana Quarti
UNIVERSITÀ DEGLI STUDI DI PADOVA Facoltà di Ingegneria sede di Vicenza A.A. 2007/08
 UNIVERSITÀ DEGLI STUDI DI PADOVA Facoltà di Ingegneria sede di Vicenza Corso di Disegno Tecnico Industriale per il Corso di Laurea triennale in Ingegneria Meccanica e in Ingegneria Meccatronica Tolleranze
UNIVERSITÀ DEGLI STUDI DI PADOVA Facoltà di Ingegneria sede di Vicenza Corso di Disegno Tecnico Industriale per il Corso di Laurea triennale in Ingegneria Meccanica e in Ingegneria Meccatronica Tolleranze
Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e
 Alberi di decisione Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e lanciarlo con i parametri di default.
Alberi di decisione Aprire WEKA Explorer Caricare il file circletrain.arff Selezionare random split al 66% come modalità di test Selezionare J48 come classificatore e lanciarlo con i parametri di default.
APPUNTI DI MATEMATICA ALGEBRA \ INSIEMISTICA \ TEORIA DEGLI INSIEMI (1)
") ALGEBRA \ INSIEMISTICA \ TEORIA DEGLI INSIEMI (1) Un insieme è una collezione di oggetti. Il concetto di insieme è un concetto primitivo. Deve esistere un criterio chiaro, preciso, non ambiguo, inequivocabile,
ALGEBRA \ INSIEMISTICA \ TEORIA DEGLI INSIEMI (1) Un insieme è una collezione di oggetti. Il concetto di insieme è un concetto primitivo. Deve esistere un criterio chiaro, preciso, non ambiguo, inequivocabile,
Il rendering fotorealistico. Conferimento ad oggetti 3D di un aspetto particolarmente fotorealistico
 Il rendering fotorealistico Conferimento ad oggetti 3D di un aspetto particolarmente fotorealistico Rendering fotorealistico Gli oggetti sottoposti a rendering devono essere facce 3D o essere tridimensionali.
Il rendering fotorealistico Conferimento ad oggetti 3D di un aspetto particolarmente fotorealistico Rendering fotorealistico Gli oggetti sottoposti a rendering devono essere facce 3D o essere tridimensionali.
Dopo il successo di SoundPLAN 7.0, Spectra è lieta di annunciare la pubblicazione della nuova versione di SoundPLAN 7.1.
 Dopo il successo di SoundPLAN 7.0, Spectra è lieta di annunciare la pubblicazione della nuova versione di SoundPLAN 7.1. Ecco alcune delle novità in anteprima: SoundPLAN 7.1 è gratuito per coloro che hanno
Dopo il successo di SoundPLAN 7.0, Spectra è lieta di annunciare la pubblicazione della nuova versione di SoundPLAN 7.1. Ecco alcune delle novità in anteprima: SoundPLAN 7.1 è gratuito per coloro che hanno
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica
 Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica Terzo Appello del corso di Geometria e Algebra II Parte - Docente F. Flamini, Roma, 7/09/2007 SVOLGIMENTO COMPITO III APPELLO
Universita degli Studi di Roma Tor Vergata Facolta di Ingegneria Elettronica Terzo Appello del corso di Geometria e Algebra II Parte - Docente F. Flamini, Roma, 7/09/2007 SVOLGIMENTO COMPITO III APPELLO
FUNZIONE REALE DI UNA VARIABILE
 FUNZIONE REALE DI UNA VARIABILE Funzione: legge che ad ogni elemento di un insieme D (Dominio) tale che D R, fa corrispondere un elemento y R ( R = Codominio ). f : D R : f () = y ; La funzione f(): A
FUNZIONE REALE DI UNA VARIABILE Funzione: legge che ad ogni elemento di un insieme D (Dominio) tale che D R, fa corrispondere un elemento y R ( R = Codominio ). f : D R : f () = y ; La funzione f(): A
 1 Il Laser 2 Il laser quindi non è altro che una radiazione elettromagnetica, ovvero un'onda luminosa, avente particolari caratteristiche: deve essere composta da luce di una sola frequenza (monocromaticità).
1 Il Laser 2 Il laser quindi non è altro che una radiazione elettromagnetica, ovvero un'onda luminosa, avente particolari caratteristiche: deve essere composta da luce di una sola frequenza (monocromaticità).
Scheduling della CPU. Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux
 Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Scheduling della CPU Sistemi multiprocessori e real time Metodi di valutazione Esempi: Solaris 2 Windows 2000 Linux Sistemi multiprocessori Fin qui si sono trattati i problemi di scheduling su singola
Realizza i tuoi progetti con grande facilità. Con KomPonGo ti basteranno pochi click per creare nuovi schemi di pallettizzazione.
 KomPonGo 3D Software for palletizing solutions Creare schemi di pallettizzazione non è mai stato così semplice. KomPonGo è un software innovativo che consente di soddisfare le esigenze produttive della
KomPonGo 3D Software for palletizing solutions Creare schemi di pallettizzazione non è mai stato così semplice. KomPonGo è un software innovativo che consente di soddisfare le esigenze produttive della
Introduzione all analisi dei segnali digitali.
 Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
Introduzione all analisi dei segnali digitali. Lezioni per il corso di Laboratorio di Fisica IV Isidoro Ferrante A.A. 2001/2002 1 Segnali analogici Si dice segnale la variazione di una qualsiasi grandezza
La codifica delle immagini
 La codifica delle immagini La digitalizzazione La digitalizzazione di oggetti legati a fenomeni di tipo analogico, avviene attraverso due parametri fondamentali: 1. Il numero dei campionamenti o di misurazioni
La codifica delle immagini La digitalizzazione La digitalizzazione di oggetti legati a fenomeni di tipo analogico, avviene attraverso due parametri fondamentali: 1. Il numero dei campionamenti o di misurazioni
READY-TO-GO PRODUZIONE
 READY-TO-GO PRODUZIONE Modulo Standard QlikView OBIETTIVO Le aziende che fabbricano prodotti hanno la necessità di avere un controllo efficiente delle loro attività produttive e di assemblaggio. Questo,
READY-TO-GO PRODUZIONE Modulo Standard QlikView OBIETTIVO Le aziende che fabbricano prodotti hanno la necessità di avere un controllo efficiente delle loro attività produttive e di assemblaggio. Questo,
VRay Map: VRayEdgesTex
 VRay Map: VRayEdgesTex INTRODUZIONE Uno dei classici impieghi della VRayEdgeTex consiste nella simulazione dell effetto filo di ferro, effetto simile a quello generato tramite l attivazione dell opzione
VRay Map: VRayEdgesTex INTRODUZIONE Uno dei classici impieghi della VRayEdgeTex consiste nella simulazione dell effetto filo di ferro, effetto simile a quello generato tramite l attivazione dell opzione
HDRI (High Digital Range Images)
") HDRI (High Digital Range Images) Un punto d incontro tra la fotografia digitale, la fisica e la realtà virtuale Marcello Seri Università di Bologna Cosa L High Dynamic Range Imaging, è una tecnica utilizzata
HDRI (High Digital Range Images) Un punto d incontro tra la fotografia digitale, la fisica e la realtà virtuale Marcello Seri Università di Bologna Cosa L High Dynamic Range Imaging, è una tecnica utilizzata