Diagrammi polari, di Nyquist e di Nichols
|
|
|
- Silvano Lombardi
- 10 anni fa
- Просмотров:
Транскрипт
1 Diagrammi polari, di Nyquist e di Nichols

2 Definizione (1/2) Il diagramma di Nichols (DdNic) di una fdt consiste nella rappresentazione grafica di G(s) s= jω = G(jω) = M( ω)e jϕ( ω), per ω (, ) sul piano cartesiano ϕ M gradi db 2
e jϕ( ω), per ω (, ) sul piano")
3 Definizione (2/2) Nel DdNic la variabile indipendente ω diventa la coordinata curvilinea (un punto sul piano ϕ M per ciascun valore di ω) Per ovvi motivi i valori dell ascissa possono essere limitati (ma non è obbligatorio) tra 18 e +18 oppure tra e +36 oppure tra 36 e ; nel prosieguo si opterà preferibilmente per l intervallo 36 3

4 Esempio 1 (1/2) Modulo (db) (s +.1) G(s) = 2 s(s +.2s + 1)(s + 1) A D B C ω + ω Fase ( ) 4

5 Esempio 1 in Matlab 5

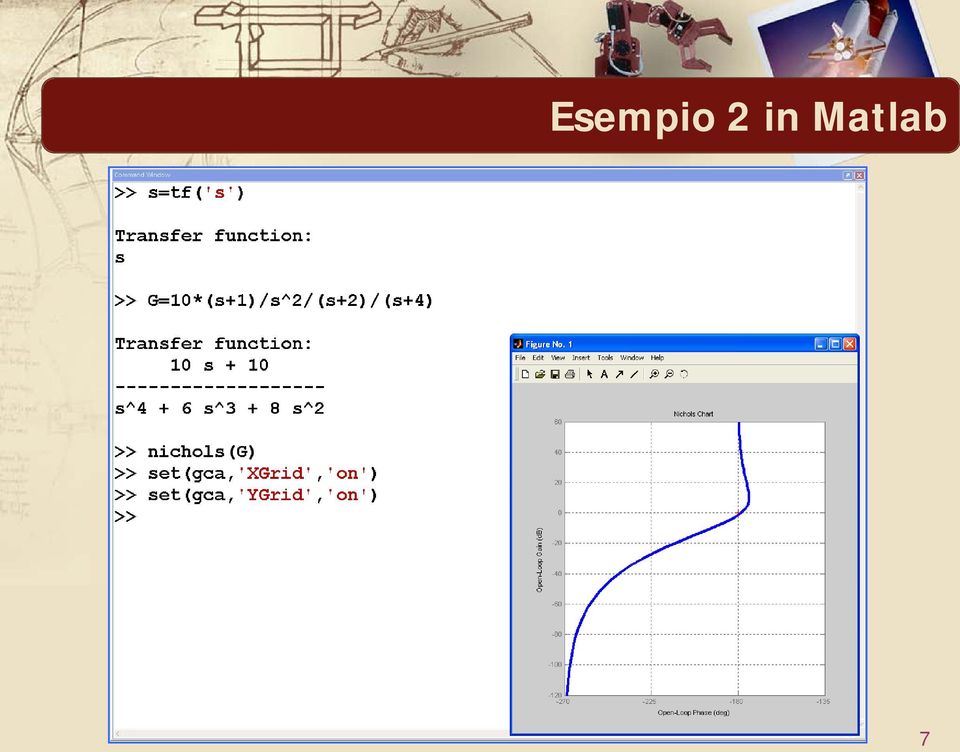
6 1 1(s + 1) G(s) = 2 s (s + 2)(s + Esempio 2 (1/2) 4) 5 Modulo (db) Fase ( ) 6

7 Esempio 2 in Matlab 7
8 Lettura di m G sul DdNic Il margine di guadagno può essere letto anche sul diagramma di Nichols di G a (jω), osservando che il punto A corrisponde all intersezione del diagramma con l asse verticale a fase -18 o 4 2 Nichols Chart n i,a = m G,dB Open-Loop Gain (db) A R /m G Open-Loop Phase (deg) ω π 8
 -2-4 -6 A R -8-1 1/m G -12-27 -225-18 -135-9 Open-Loop Phase")
9 Lettura di m ϕ sul DdNic Il margine di fase può essere letto anche sul diagramma di Nichols di G a (jω), osservando che il punto C corrisponde all intersezione del diagramma con l asse orizzontale a db 4 2 Nichols Chart m ϕ n i,a = Open-Loop Gain (db) m ϕ R = 1-8 C R Open-Loop Phase (deg) ω c 9
 -2-4 -6 m ϕ R = 1-8 C R -1-12 -27-225 -18-135 -9 Open-Loop Phase (deg)")
10 Margini di stabilità
11 La carta di Nichols (1/2) I luoghi a M (modulo) costante e a N (fase) costante possono essere tracciati anche sul piano di Nichols: il loro insieme costituisce la carta di Nichols 4 Generata in Matlab con il comando: ngrid( new ) db.5 db 1 db 3 db 6 db db -1 db -3 db -6 db db -2-2 db
 3 2 1.25 db.")
12 La carta di Nichols (2/2) Sovrapponendo alla carta di Nichols il diagramma di Nichols della funzione d anello G a (jω), è possibile ricavare il valore di modulo e fase di W y (jω) per ogni ω Sono di particolare interesse i luoghi a modulo costante, poiché permettono di trovare un legame fra M r e m ϕ e fra M r e m G 12

13 I luoghi a M costante sul piano di Nichols 2 M = -3dB M = 3dB M =

14 Legame fra M r e m ϕ (1/3) M r,lim M < M r,lim DdNic di G a esterno alla curva M r,lim 2 db 3 db 1 db G a 2 db < M r < 3 db

15 Legame fra M r e m ϕ (2/3) M < M r,lim 2 m ϕ > m ϕ,lim 15 M r,lim m ϕ,lim -2 G a m ϕ 15

16 Legame fra M r e m ϕ (3/3) La condizione che il diagramma di Nichols di G a (jω) risulti esterno alla curva M = M r,lim è necessaria e sufficiente a garantire M r < M r,lim La condizione m ϕ > m ϕ,lim (ove m ϕ,lim è il margine di fase letto in corrispondenza della curva M = M r,lim ) è necessaria ma non sufficiente per garantire M r < M r,lim Se il DdNic di G a (jω) interseca la curva M = M r,lim a pulsazioni inferiori alla ω c (alla quale viene letto m ϕ ), la W y (jω) presenta M r > M r,lim anche quando m ϕ > m ϕ,lim 16
, la W y (jω) presenta M r > M r,lim")
17 Un esempio (1/3) 2 2(s + 5)(s + 12) (1 +.7s) F(s) = ; C(s) = 1 s(s + 4)(s + 7.2s + 16) ( s) 2 2 Si vorrebbe ottenere in catena chiusa: M r < 2 db Magnitude (db) DdB della fdt d anello: G a (s) = C(s)F(s) Phase (deg) -135 o m ϕ Frequency (rad/sec) 17
 = C(s)F(s) Phase")
18 Un esempio (2/3) 2 2(s + 5)(s + 12) (1 +.7s) F(s) = ; C(s) = 1 s(s + 4)(s + 7.2s + 16) ( s) 2 2 m ϕ soddisfa la condizione necessaria per avere M r < 2 db: m ϕ > 48 o Nonostante ciò, il DdNic di Ga(jω) interseca la curva M = 2 db Open-Loop Gain (db) db Open-Loop Phase (deg) m ϕ m ϕ,lim = 48 o G a 18
 interseca la curva M = 2 db Open-Loop Gain (db) 2 15 1")
19 Un esempio (3/3) 2 2(s + 5)(s + 12) (1 +.7s) F(s) = ; C(s) = 1 s(s + 4)(s + 7.2s + 16) ( s) 2 2 Il picco di risonanza della fdt in catena chiusa è superiore a 2 db Magnitude (db) M r = 2.23 db Bode Diagram -45 Phase (deg) Frequency (rad/sec) 19
 1-1 -2-3 -4-5 -6-7 -8 M r = 2.")
20 Legame fra M r e m G (1/4) M < M r,lim 2 DdNic di G a esterno alla curva M r,lim 15 M r,lim G a

21 Legame fra M r e m G (2/4) M < M r,lim 2 m G > m G,lim 15 M r,lim 1 5 m G,lim -5 m G G a
22 Legame fra M r e m G (3/4) La condizione m G > m G,lim (ove m G,lim è il margine di guadagno letto in corrispondenza della curva M = M r,lim ) è necessaria ma non sufficiente per garantire M r < M r,lim Se il DdNic di G a (jω) interseca la curva M = M r,lim a pulsazioni inferiori alla ω π (alla quale viene letto m G ), la W y (jω) presenta M r > M r,lim anche quando m G > m G,lim 22
23 Legame fra M r e m G (4/4) Poiché m G,lim risulta contenuto anche per piccoli valori di M r,lim, il soddisfacimento di m G > m G,lim risulta spesso insufficiente a garantire M r < M r,lim Nell esempio precedente il margine di guadagno era infinito e quindi superiore a qualunque m G,lim considerato, indipendentemente dall effettivo picco di risonanza N.B.: Nella pratica dinamiche di alta frequenza trascurate nel modello e vincoli tecnologici impediscono al margine di guadagno di essere infinito 23
24 Relazioni numeriche fra margini e M r I legami fra picco di risonanza e margini di stabilità ricavati dalla carta di Nichols possono essere espressi numericamente come: 2 4Mr,lim 1 Mr,lim mϕ,lim = arctan, m 2 G,lim = 2Mr,lim 1 Mr,lim + 1 con m ϕ,lim in rad, M r,lim e m G,lim in unità naturali o ( mϕ ) 6 5 gradi ( M ) ( mg,lim ) 6.4 ( Mr,lim ),lim r,lim db db db Approssimazioni valide per db < M r,lim <6dB 24
25 Osservazioni conclusive La condizione M r < M r,lim, se rispettata, garantisce una buona robustezza della stabilità, con soddisfacenti margini di fase e di guadagno (rispettivamente pari almeno a m ϕ,lim e m G,lim ) Le condizioni m ϕ > m ϕ,lim e m G > m G,lim non garantiscono con assoluta certezza che il picco di risonanza risulti inferiore a M r,lim, anche se il suo valore è comunque contenuto in presenza di buoni margini di stabilità 25
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
Stabilità dei sistemi di controllo in retroazione Margini di stabilità Indicatori di robustezza della stabilità Margine di guadagno Margine di fase Stabilità regolare e marginale ed estensioni delle definizioni
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
Fondamenti di Automatica
 Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. Analisi
Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. Analisi
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: [email protected]
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: [email protected]
Principali comandi MATLAB utili per il corso di Controlli Automatici
 Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Diagrammi di Bode. I Diagrammi di Bode sono due: 1) il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione
 il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione") 0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
sensore di forza K m D L Vrif Ka Vrif r x -Vp/2 Vp/2 3URYD GL HVDPH GL )RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ 0HFFDQLFD OXJOLR
RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ 0HFFDQLFD OXJOLR") 3URYD GL HVDPH GL )RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ HFFDQLFD OXJOLR F sensore di forza 1) Il sistema in figura è un servomeccanismo in grado di facilitare la movimentazione di
3URYD GL HVDPH GL )RQGDPHQWL GL $XWRPDWLFD &RUVL GL /DXUHD LQ (OHWWURQLFD H LQ HFFDQLFD OXJOLR F sensore di forza 1) Il sistema in figura è un servomeccanismo in grado di facilitare la movimentazione di
Esercizio 1. Si consideri la funzione di trasferimento. G(s) = K 1 + st
 = K 1 + st") Esercizio. Si consideri la funzione di trasferimento G(s) = K + st + sτ. Si dimostri che, qualunque siano i valori dei parametri reali K, T e τ, il relativo diagramma di Nyquist è una circonferenza. Si
Esercizio. Si consideri la funzione di trasferimento G(s) = K + st + sτ. Si dimostri che, qualunque siano i valori dei parametri reali K, T e τ, il relativo diagramma di Nyquist è una circonferenza. Si
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [[email protected]]
![Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]](/thumbs/24/2724545.jpg "Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]") Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [[email protected]] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [[email protected]] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
Diagrammi polari, di Nyquist e di Nichols
 Diagrammi polari, di Nyquist e di Nichols Diagramma polare La risposta in frequenza si analizza tramite G(s) s jω G(jω) M( ω) e G(jω) jϕ( ω) e ω < Un altra rappresentazione grafica di G(jω) si ottiene
Diagrammi polari, di Nyquist e di Nichols Diagramma polare La risposta in frequenza si analizza tramite G(s) s jω G(jω) M( ω) e G(jω) jϕ( ω) e ω < Un altra rappresentazione grafica di G(jω) si ottiene
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Fondamenti di Automatica - I Parte Il progetto del controllore
 Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
Fondamenti di Automatica - I Parte Il progetto del controllore Antonio Bicchi, Giordano Greco Università di Pisa 1 INDICE 2 Indice 1 Introduzione 3 2 Approssimazioni della f.d.t. in anello chiuso 5 3 Metodi
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Introduzione. Margine di ampiezza... 2 Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di Bode... 6
 ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
ppunti di Controlli utomatici Capitolo 7 parte II Margini di stabilità Introduzione... Margine di ampiezza... Margine di fase... 5 Osservazione... 6 Margini di stabilità e diagrammi di ode... 6 Introduzione
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Principali reti di compensazione
 Principali reti di compensazione Caratteristiche delle reti attenuatrici (1/5) Una rete attenuatrice o integrativa è descritta da una fdt della forma R (s) i = τ + mi 1+τs i 1 s i con τ >, m > 1 i i La
Principali reti di compensazione Caratteristiche delle reti attenuatrici (1/5) Una rete attenuatrice o integrativa è descritta da una fdt della forma R (s) i = τ + mi 1+τs i 1 s i con τ >, m > 1 i i La
Rappresentazione grafica di un sistema retroazionato
 appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
appresentazione grafica di un sistema retroazionato La f.d.t. di un.o. ha generalmente alcune decine di poli Il costruttore compensa il dispositivo in maniera da dotarlo di un singolo polo (polo dominante).
Criteri di stabilità (ver. 1.2)
") Criteri di stabilità (ver. 1.2) 1 1.1 Il concetto di stabilità Il concetto di stabilità è piuttosto generale e può essere definito in diversi contesti. Per i problemi di interesse nell area dei controlli
Criteri di stabilità (ver. 1.2) 1 1.1 Il concetto di stabilità Il concetto di stabilità è piuttosto generale e può essere definito in diversi contesti. Per i problemi di interesse nell area dei controlli
Il criterio di Nyquist
 0.0. 4.5 1 Il criterio di Nyquist IlcriteriodiNyquistconsentedistabilireseunsistema,delqualesiconosce la risposta armonica ad anello aperto, sia stabile o meno una volta chiuso in retroazione: r(t) e(t)
0.0. 4.5 1 Il criterio di Nyquist IlcriteriodiNyquistconsentedistabilireseunsistema,delqualesiconosce la risposta armonica ad anello aperto, sia stabile o meno una volta chiuso in retroazione: r(t) e(t)
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. 1
Corso Tecnologie dei Sistemi di Controllo. Tecniche di taratura di un PID
 Corso Tecniche di taratura di un PID Ing. Valerio Scordamaglia Università Mediterranea di Reggio Calabria, Loc. Feo di Vito, 89060, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica
Corso Tecniche di taratura di un PID Ing. Valerio Scordamaglia Università Mediterranea di Reggio Calabria, Loc. Feo di Vito, 89060, RC, Italia D.I.M.E.T. : Dipartimento di Informatica, Matematica, Elettronica
Controlli Automatici 2 22/06/05 Compito a
 Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
Esercizi di Matematica. Funzioni e loro proprietà
 www.pappalardovincenzo.3.it Esercizi di Matematica Funzioni e loro proprietà www.pappalardovincenzo.3.it ESERCIZIO www.pappalardovincenzo.3.it ESERCIZIO ESERCIZIO www.pappalardovincenzo.3.it ESERCIZIO
www.pappalardovincenzo.3.it Esercizi di Matematica Funzioni e loro proprietà www.pappalardovincenzo.3.it ESERCIZIO www.pappalardovincenzo.3.it ESERCIZIO ESERCIZIO www.pappalardovincenzo.3.it ESERCIZIO
Diagrammi Di Bode. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Diagrammi Di Bode Prof. Laura Giarré [email protected] https://giarre.wordpress.com/ca/ Diagrammi di Bode e polari Problema della rappresentazione grafica di funzioni complesse di variabile reale
Diagrammi Di Bode Prof. Laura Giarré [email protected] https://giarre.wordpress.com/ca/ Diagrammi di Bode e polari Problema della rappresentazione grafica di funzioni complesse di variabile reale
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo. DIAGRAMMI DI BODE
 CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html DIAGRAMMI DI BODE Ing. e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html DIAGRAMMI DI BODE Ing. e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
Esercizi sul luogo delle radici
 Esercizi sul luogo delle radici Gli esercizi che seguono faranno riferimento allo schema a blocchi riportato di seguito. r k G(s) y Esercizio. Sia data la seguente funzione di trasferimento s(s+). Verificare
Esercizi sul luogo delle radici Gli esercizi che seguono faranno riferimento allo schema a blocchi riportato di seguito. r k G(s) y Esercizio. Sia data la seguente funzione di trasferimento s(s+). Verificare
Chi non risolve esercizi non impara la matematica.
 .6 esercizi 3 Esercizio 8. Stabilisci se la funzione = 4 è pari o dispari. Soluzione. Sostituiamo al posto di in f(): f( ) = ( ) 4 ( ) = 4 = f() La funzione è pari. Vedi le figure 4f e 30f..6 esercizi
.6 esercizi 3 Esercizio 8. Stabilisci se la funzione = 4 è pari o dispari. Soluzione. Sostituiamo al posto di in f(): f( ) = ( ) 4 ( ) = 4 = f() La funzione è pari. Vedi le figure 4f e 30f..6 esercizi
SPECIFICHE DI UN SISTEMA IN ANELLO CHIUSO
 SPECIFICHE DI UN SISTEMA IN ANELLO CHIUSO Consideriamo il classico esempio di compensazione in cascata riportato in figura, comprendente il plant o sistema controllato con funzione di trasferimento G P
SPECIFICHE DI UN SISTEMA IN ANELLO CHIUSO Consideriamo il classico esempio di compensazione in cascata riportato in figura, comprendente il plant o sistema controllato con funzione di trasferimento G P
Considerazioni sulle specifiche.
 # SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
# SINTESI PER TENTATIVI IN ω PER GLI ASSERVIMENTI # Considerazioni sulle specifiche. Come accennato in precedenza, prima di avviare la prima fase della sintesi di un sistema di asservimento, e cioe la
Anno 5 Funzioni inverse e funzioni composte
 Anno 5 Funzioni inverse e funzioni composte 1 Introduzione In questa lezione impareremo a definire e ricercare le funzioni inverse e le funzioni composte. Al termine di questa lezione sarai in grado di:
Anno 5 Funzioni inverse e funzioni composte 1 Introduzione In questa lezione impareremo a definire e ricercare le funzioni inverse e le funzioni composte. Al termine di questa lezione sarai in grado di:
Margine di fase e margine di guadagno
 Margine di fase e margine di guadagno Prendiamo in considerazione sistemi per i uali la funzione ad anello aperto, L(s), sia stabile e non presenti dunue, poli a parte reale positiva. In tal caso il criterio
Margine di fase e margine di guadagno Prendiamo in considerazione sistemi per i uali la funzione ad anello aperto, L(s), sia stabile e non presenti dunue, poli a parte reale positiva. In tal caso il criterio
CORSO DI ORDINAMENTO. Tema di: SISTEMI, AUTOMAZIONE E ORGANIZZAZIONE DELLA PRODUZIONE
 Sessione ordinaria 211 Seconda prova scritta M48 - ESAME DI STATO DI ISTITUTO PROFESSIONALE ORSO DI ORDINAMENTO Indirizzo: TENIO DELLE INDUSTRIE ELETTRIHE Tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE
Sessione ordinaria 211 Seconda prova scritta M48 - ESAME DI STATO DI ISTITUTO PROFESSIONALE ORSO DI ORDINAMENTO Indirizzo: TENIO DELLE INDUSTRIE ELETTRIHE Tema di: SISTEMI, AUTOMAZIONE E ORANIZZAZIONE
2 FUNZIONI REALI DI VARIABILE REALE
 2 FUNZIONI REALI DI VARIABILE REALE 2.1 CONCETTO DI FUNZIONE Definizione 2.1 Siano A e B due insiemi. Una funzione (o applicazione) f con dominio A a valori in B è una legge che associa ad ogni elemento
2 FUNZIONI REALI DI VARIABILE REALE 2.1 CONCETTO DI FUNZIONE Definizione 2.1 Siano A e B due insiemi. Una funzione (o applicazione) f con dominio A a valori in B è una legge che associa ad ogni elemento
CONTROLLORI STANDARD PID. Guido Vagliasindi Controlli Automatici A.A. 06/07 Controllori Standard PID
 ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected]
Fondamenti di Automatica Funzioni di trasferimento: robustezza e prestazioni Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected]
Soluzione degli esercizi del Capitolo 9
 Soluzione degli esercizi del Capitolo 9 Soluzione dell Esercizio 9.1 Il diagramma polare associato alla funzione L(s) = µ/s, µ > comprende l intero semiasse reale negativo. È quindi immediato concludere
Soluzione degli esercizi del Capitolo 9 Soluzione dell Esercizio 9.1 Il diagramma polare associato alla funzione L(s) = µ/s, µ > comprende l intero semiasse reale negativo. È quindi immediato concludere
LA RETTA. Retta per l'origine, rette orizzontali e verticali
 Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Retta per l'origine, rette orizzontali e verticali LA RETTA Abbiamo visto che l'equazione generica di una retta è del tipo Y = mx + q, dove m ne rappresenta la pendenza e q il punto in cui la retta incrocia
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected] pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected] pag. 1
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO
 A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
A.S. 2008/2009 CLASSE 5BEA SISTEMI AUTOMATICI SINTESI DEL CORSO Sono stati trattati gli elementi base per l'analisi e il dimensionamento dei sistemi di controllo nei processi continui. E' quindi importante:
Definizione DEFINIZIONE
 Definizione Funzione reale di due variabili reali Indichiamo con R 2 l insieme di tutti i vettori bidimensionali. Dato un sottoinsiemed R 2, una funzione f: D R è una legge che assegna a ogni punto (x,
Definizione Funzione reale di due variabili reali Indichiamo con R 2 l insieme di tutti i vettori bidimensionali. Dato un sottoinsiemed R 2, una funzione f: D R è una legge che assegna a ogni punto (x,
Dalle misure eseguite con un segnale sinusoidale su di un impianto si è verificato che esso:
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
Sistemi di controllo industriali
 Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
Definisci il Campo di Esistenza ( Dominio) di una funzione reale di variabile reale e, quindi, determinalo per la funzione:
 di una funzione reale di variabile reale e, quindi, determinalo per la funzione:") Verso l'esame di Stato Definisci il Campo di Esistenza ( Dominio) di una funzione reale di variabile reale e, quindi, determinalo per la funzione: y ln 5 6 7 8 9 0 Rappresenta il campo di esistenza determinato
Verso l'esame di Stato Definisci il Campo di Esistenza ( Dominio) di una funzione reale di variabile reale e, quindi, determinalo per la funzione: y ln 5 6 7 8 9 0 Rappresenta il campo di esistenza determinato
1 Appunti a cura di prof.ssa MINA Maria Letizia integrati e pubblicati in data 12/10/10
 FUNZIONE OMOGRAFICA ASINTOTO VERTICALE: ASINTOTO ORIZZONTALE: 1 abbiamo verificato che, applicando all iperbole equilatera base, la dilatazione verticale di coefficiente 7 e la traslazione di vettore di
FUNZIONE OMOGRAFICA ASINTOTO VERTICALE: ASINTOTO ORIZZONTALE: 1 abbiamo verificato che, applicando all iperbole equilatera base, la dilatazione verticale di coefficiente 7 e la traslazione di vettore di
Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Lezione 19. Stabilità robusta. F. Previdi - Fondamenti di Automatica - Lez. 19 1
 Lezione 19. Stabilità robusta F. Previdi - Fondamenti di Automatica - Lez. 19 1 Schema 1. Stabilità & incertezza 2. Indicatori di stabilità robusta 3. Margine di guadagno 4. Margine di fase 5. Criterio
Lezione 19. Stabilità robusta F. Previdi - Fondamenti di Automatica - Lez. 19 1 Schema 1. Stabilità & incertezza 2. Indicatori di stabilità robusta 3. Margine di guadagno 4. Margine di fase 5. Criterio
Regime permanente e transitorio
 Regime permanente e transitorio Tipicità dei disturbi Effetti sull uscita in regime permanente di disturbi polinomiali Effetti sull uscita in regime permanente di disturbi sinusoidali Implicazioni sul
Regime permanente e transitorio Tipicità dei disturbi Effetti sull uscita in regime permanente di disturbi polinomiali Effetti sull uscita in regime permanente di disturbi sinusoidali Implicazioni sul
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Regime permanente e transitorio
 Regime permanente e transitorio Analisi del comportamento in regime permanente e verifica in simulazione Analisi del comportamento nel dominio della frequenza e in transitorio 2 27 Politecnico di Torino
Regime permanente e transitorio Analisi del comportamento in regime permanente e verifica in simulazione Analisi del comportamento nel dominio della frequenza e in transitorio 2 27 Politecnico di Torino
.y 6. .y 4. .y 5. .y 2.y 3 B C C B. B f A B f -1
 Funzioni FUNZIONI Una funzione è una relazione fra due insiemi non vuoti e, che associa ad ogni elemento uno e un solo elemento. In simboli si scrive: = oppure. x 1. x..y B C.y 5 x 4..y 4 L elemento è
Funzioni FUNZIONI Una funzione è una relazione fra due insiemi non vuoti e, che associa ad ogni elemento uno e un solo elemento. In simboli si scrive: = oppure. x 1. x..y B C.y 5 x 4..y 4 L elemento è
Prof. A. Bemporad, Ing. S. Di Cairano 26 Maggio 2005. Esercitazione di Tecnologia dei Sistemi di Controllo
 Università degli Studi di Siena Prof. A. Bemporad, Ing. S. Di Cairano 26 Maggio 2005 Esercitazione di Tecnologia dei Sistemi di Controllo Implementazione di controllori con xpc target Questa esercitazione
Università degli Studi di Siena Prof. A. Bemporad, Ing. S. Di Cairano 26 Maggio 2005 Esercitazione di Tecnologia dei Sistemi di Controllo Implementazione di controllori con xpc target Questa esercitazione
INTRODUZIONE ALLO STUDIO DEI SISTEMI DI CONTROLLLO AUTOMATICO: APPROCCIO CLASSICO APPROCCIO MODERNO
 INTRODUZIONE ALLO STUDIO DEI SISTEMI DI CONTROLLLO AUTOMATICO: APPROCCIO CLASSICO APPROCCIO MODERNO CARATTERISTICHE DELLE METODOLOGIE E DELL APPROCCIO CLASSICO : a) Fa riferimento essenzialmente al dominio
INTRODUZIONE ALLO STUDIO DEI SISTEMI DI CONTROLLLO AUTOMATICO: APPROCCIO CLASSICO APPROCCIO MODERNO CARATTERISTICHE DELLE METODOLOGIE E DELL APPROCCIO CLASSICO : a) Fa riferimento essenzialmente al dominio
DOMINIO E LIMITI. Esercizio 3 Studiare gli insiemi di livello della funzione f, nei seguenti casi: 1) f(x,y) = y2 x 2 + y 2.
 f(x,y) = y2 x 2 + y 2.") FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
FUNZIONI DI DUE VARIABILI 1 DOMINIO E LIMITI Domini e disequazioni in due variabili. Insiemi di livello. Elementi di topologia (insiemi aperti, chiusi, limitati, convessi, connessi per archi; punti di
Tecniche di progetto di controllori
 Tecniche di progetto di controllori (ver..2) In questo capitolo sarà descritta una tecnica di progetto classica di controllori denominata sintesi per tentativi. Abbiamo visto precedentemente come calcolare
Tecniche di progetto di controllori (ver..2) In questo capitolo sarà descritta una tecnica di progetto classica di controllori denominata sintesi per tentativi. Abbiamo visto precedentemente come calcolare
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it [email protected] via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it [email protected] via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7