Grafica al calcolatore Computer Graphics
|
|
|
- Cosima Giglio
- 5 anni fa
- Visualizzazioni
Transcript
1 Grafica al calcolatore Computer Graphics 5 - Modellazione 1
2 Modellazione Definiamo ora possibili strutture dati per modellare gli oggetti nello spazio. Poi vedremo come modellare anche la formazione delle immagini attraverso il rendering mondo reale, modello matematico, artista 3D... acquisizione 3D (scansione) simulazione (elementi finiti) modellazione (3DStudioMax, Maya) Geometria preprocessing (modelling) rendering Immagine/i applicazione interattiva 2
3 Geometria analitica Premessa: prima di vedere come si modellano gli oggetti, ricordiamo come si definiscono nello spazio Euclideo 3D le figure geometriche importanti dal punto di vista della modellazione grafica e del rendering Rette: sono identificabili da un punto qualsiasi Q che giaccia sulla retta e da una direzione data da un versore u. E facile vedere che sono il luogo dei punti dati da P = Q + tu t IR In termini di componenti si vede facilmente che vale la seguente equazione Se si vuole specificare una retta dati due punti R e Q, basta usare le formule date qui sopra tenendo conto che il versore che identica la retta e dato da u=(r-q)/ R-Q Grafica
4 Geometria analitica Semiretta: basta aggiungere il vincolo t>= 0 Segmenti: dati i punti iniziale e finale P e Q possiamo scriverli come P = Q + t(r-q) t [0; 1] Sfere: dato centro O e raggio r, i punti della superficie sferica sono dati dall'equazione P = O + ru con u versore generico. Si dimostra facilmente che, in termini delle coordinate, la superficie sferica è data dall'equazione (x-x0)2 +(y-y0)2+(z-z0)2 = r2 Piani: dati 3 punti non allineati P, Q ed R il luogo dei punti che descrive il piano che li comprende è la combinazione affine S = αp + βq + γr α,β,γ IR α+β+γ=1 Alternativamente si puo definire un piano a partire da un punto Q che vi appartiene e da un vettore u che ne identica la normale come il luogo dei punti P tali che (P - Q) u = 0 Grafica
5 Geometria analitica In termini di coordinate abbiamo (x-x')ux + (y-y')uy + (z-z')uz = 0 Per passare dalla prima alla seconda rappresentazione basta prendere come punto Q e come vettore u = (P-Q) X (R-Q) Semispazi: il piano di cui sopra identica due semispazi, uno positivo ed uno negativo: (P-Q) u > 0 (P-Q) u < 0 Grafica
6 Poligoni Un poligono P è un insieme finito di segmenti (spigoli) di IR 2, in cui ogni estremo (vertice) e comune a esattamente due segmenti, che si dicono adiacenti. Un poligono è detto semplice se ogni coppia di spigoli non adiacenti ha intersezione vuota. Teorema di Jordan: Un poligono semplice P divide il piano in due regioni o facce, una limitata (detta interno di P) ed una illimitata (detta esterno di P). Per convenzione, un poligono viene rappresentato dalla sequenza dei suoi vertici P1...Pn ordinati in modo che l'interno del poligono giaccia alla sinistra della retta orientata da Pi a Pi+1, ovvero i vertici sono ordinati in senso antiorario. Grafica

7 Poliedri In IR3 un poliedro semplice e denito da un insieme finito di poligoni (facce) tali che ciascuno spigolo di una faccia e condiviso da esattamente un'altra faccia e le facce non si intersecano che negli spigoli. Grafica
8 Rappresentazione degli oggetti Gli oggetti che si vogliono rappresentare in una applicazione grafica hanno di solito caratteristiche particolari Sono finiti Sono chiusi (non sempre) Sono continui Le rappresentazioni di oggetti (regioni dello spazio, in generale) si suddividono in basate sul contorno (boundary): descrivono una regione in termini della superficie che a delimita (boundary representation, o b-rep). basate sullo spazio occupato (o volumetriche). 8
9 Rappresentazione comune: maglie (mesh) di triangoli E' la rappresentazione più usata nella grafica interattiva per motivi di efficienza La pipeline delle schede grafiche è ottimizzata per il rendering dei triangoli x v0 =( x0, y0, z0 ) v1 =( x1, y1, z1 ) v2 =( x2, y2, z2 ) y z 9
10 Esistono però alternative Boundary Superfici parametriche (lisce, non hanno problemi di tessellazione cioè visibilità degli spigoli tra le facce) Volumetriche Rappresentazione voxellizata (a cubetti) Geometria costruttiva solida Image based rendering: Non si modella effettivamente la scena, ma si memorizzano campionamenti della luce, renedendo però possibile una visualizzazione da più punti di vista, interattiva Light fields 10
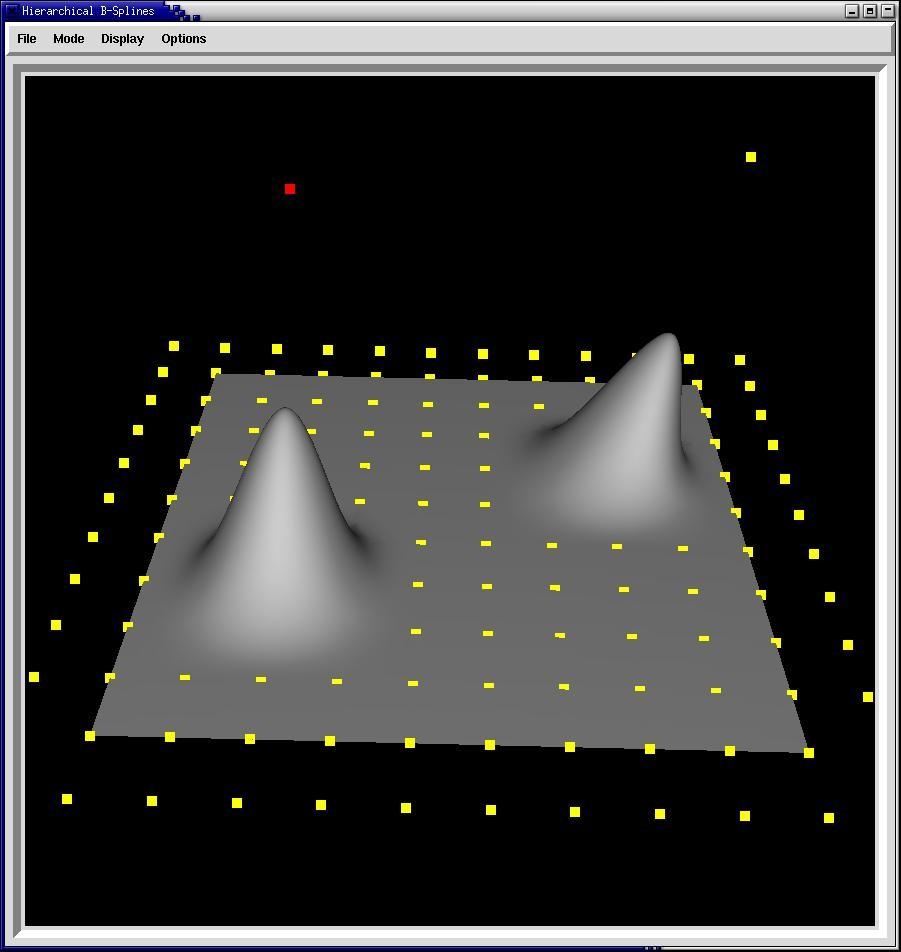
11 Curve e superfici liscie Il vantaggio principale nell uso di superfici per modellare un oggetto sarebbe l assenza del problema della tessellazione visibile (cioè approssimo una superficie lisca coi triangoli, ma vedo poi i triangoli evidenti, effetto ridotto di solito con trucchi opportuni nel rendering) Uso di superfici parametriche pesante per applicazioni in tempo reale; per lo più utilizzate in fase di modellazione o per rendering non interattivo Negli ultimi tempi le cose sono cambiate ed oggi cominciano ad apparire applicazioni di grafica avanzata che usano superfici curve anche in tempo reale 11

12 Curve e superfici liscie Esempio: curve/superfici di Bezier Dati N punti di controllo la curva la curva passa per il primo e l'ultimo e approssima gli altri con una funzione da essi dipendente Con una griglia si generano superfici 12
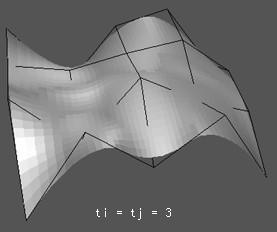
13 Superfici parametriche - Esempi 13

14 Geometria costruttiva solida (CSG) Altra rappresentazione particolarmente adatta per il modeling (diffusa nel settore CAD), ma poco efficiente per il rendering. Si tratta, essenzialmente, di costruire degli oggetti geometrici complessi a partire da modelli base con operazioni booleane 14
15 Operazioni Unione: l unione A B è l insieme dei punti che appartengono ad almeno uno dei due solidi (or non esclusivo) Differenza: la differenza A B è l insieme dei punti che appartengono ad A, ma non a B Intersezione: l intersezione A B è l insieme dei punti che appartengono ad A ed a B (and) Le operazioni CSG possono essere descritte tramite un albero (gerarchia) Ciascun nodo di un albero che non sia una foglia contiene una delle tre operazioni elementari, o Ciascuna foglia contiene una primitiva 15

16 Esempio A B 16
17 Geometria costruttiva solida Riassumendo: operazioni Unione, Intersezione, Differenza Forme base (primitive) tipicamente cuboidi, sfere, cilindri, piramidi, prismi (dipende dal software) Possibile creare / modificare in modo procedurale i modelli I software possono in genere esportare poi modelli triangolati per il rendering interattivo Garanzia sul fatto che la superficie risultante rappresenti effettivamente il bordo di un oggetto 3D (sia watertight) Supportata da molte tipologie di software (CAD, modellazione per giochi, rendering non interattivo, ecc.) 17
18 Acquisizione dal vero: point clouds Un modo per generare modelli 3D per mondi virtuali è acquisire dal vero Scansione 3D, oggi tecnologia matura con diverse tecnologie Laser Luce strutturata Visione computazionale Gli scanner (esattamente come le macchine fotografiche in 2D) di fatto non acquisiscono un modello del mondo, ma campionano la geometria (con eventuali attributi, es. colore) in una serie di punti discreti: si parla di nuvole di punti (point clouds) 18

 Una rappresentazione di una scena complessa ad alta risoluzione richiederebbe l impiego di un numero enorme numero di voxel, per cui")
19 Partizionamento spaziale (voxel) Lo spazio viene suddiviso in celle adiacenti dette in 3D voxel (equivalente dei pixel delle immagini): una cella è piena se ha intersezione non vuota con la regione, è detta vuota in caso contrario. Oppure contiene un valore di densità (tipico dei dati diagnostici es. TAC) Una rappresentazione di una scena complessa ad alta risoluzione richiederebbe l impiego di un numero enorme numero di voxel, per cui questa rappresentazione è in genere limitata a singoli oggetti. Ma le cose stanno cambiando grazie a progressi nell'hw e nel SW 19
 conversione da voxel a rappresentazione per superfici")

20 Partizionamento spaziale (voxel) Rendering di modelli voxel-based: algoritmi ad hoc (tecniche direct volume rendering) conversione da voxel a rappresentazione per superfici (triangle- based) Da una rappresentazione volumetrica voxelizzata si può passare efficientemente a una rappresentazione poligonale della superficie mediante l algoritmo detto marching cubes. 20
21 Rappresentazioni compatte Se ho solo i valori pieno/vuoto, posso rappresentare in modo compatto il volume con una struttura octree Si parte con un cubo contenente la regione e si suddivide ricorsivamente. Ci si ferma ogni volta che un ottante contiene tutte celle piene o tutte celle vuote. Più economica rispetto alla enumerazione delle singole celle, poiché grandi aree uniformi (piene o vuote) vengono rappresentate con una sola foglia (anche se nel caso peggiore il numero delle foglie è pari a quello delle celle) 21
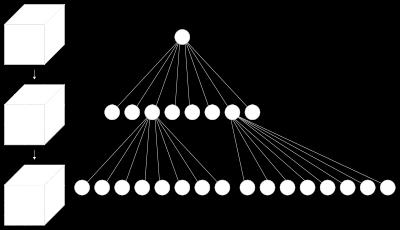
22 Octree 22

23 Octree Le strutture di partizionamento spaziale sono anche utili per contenere le geometrie poligonali: come vedremo consente di rendere più semplice la ricerca di intersezioni tra oggetti e con i raggi ottici. Vedremo 23
24 Maglie poligonali (mesh) 24
25 Poligoni e triangoli Nella grafica 3D interattiva si usa quasi sempre la modellazione basata su approssimazione poligonale degli oggetti (del loro contorno: è una boundary representation). Si tratta di approssimare una superficie 2D con un insieme di poligoni convessi opportunamente connessi gli uni agli altri. Nella pipeline di rendering si lavora in genere con i soli triangoli tutte le altre rappresentazioni eventualmente usate nel programma sono convertite prima del rendering in triangoli Possiamo usare la geometria per definire rigorosamente le proprietà dei modelli triangolati 25
26 Varietà Una varietà k-dimensionale X è un sottoinsieme di IR d in cui ogni punto ha un intorno omeomorfo alla sfera aperta di IR k. In generale le superifici degli oggetti solidi (sfere, poliedri, ecc.) sono varietà bidimensionali. Omeomorfismo: applicazione biiettiva, continua, con inversa continua. Intuizione: trasformazione senza strappi. In una varietà k-dimensionale con bordo ogni punto ha un intorno omeomorfo alla sfera aperta o alla semisfera aperta di IRk. Il bordo di X è l insieme dei punti che hanno un intorno omeomorfo alla semisfera aperta. Una varietà è sempre una varietà con bordo, eventualmente vuoto. Il bordo, se non è vuoto, è a sua volta una varietà k-1 dimensionale senza bordo. 26
27 Mesh poligonali Una maglia (mesh) triangolare è 2-complesso simpliciale puro che è anche una varietà bidimensionale con bordo. I triangoli della maglia si chiamano anche facce. La condizione di essere varietà si traduce nei seguenti vincoli ulteriori sulla struttura del complesso simpliciale: uno spigolo appartiene al massimo a due triangoli (quelli eventuali che appartengono ad uno solo formano il bordo della maglia) se due triangoli incidono sullo stesso vertice allora devono appartenere alla chiusura transitiva della relazione di 1-adiacenza, ovvero devono formare un ventaglio o un ombrello. Si usa il termine condizione 2-manifold (varietà) 27
28 Condizione 2-manifold NO SI NO SI 28
.")
29 Orientazione Il bordo della maglia consiste di uno o più anelli (sequenza chiusa di spigoli) o loop. Se non esistono spigoli di bordo la maglia è chiusa (come quelle che rappresentano la superficie di una sfera). L orientazione di una faccia è data dall ordine ciclico (orario o antiorario) dei suoi vertici incidenti. L orientazione determina il fronte ed il retro della faccia. La convenzione (usata anche da OpenGL) è che la faccia mostra il fronte 29

30 Mesh orientabili L orientazione di due facce adiacenti è compatibile se i due vertici del loro spigolo in comune sono in ordine inverso. Vuol dire che l orientazione non cambia attraversando lo spigolo in comune. La maglia si dice orientabile se esiste una scelta dell orientazione delle facce che rende compatibili tutte le coppie di facce adiacenti. Non tutte le mesh 2-manifold sono orientabili (es. anello di Moebius) 30
31 Maglie/Mesh generiche Abbiamo definito la maglia triangolare. In maniera analoga si può estendere la definizione a maglie poligonali generiche Maglie poligonali generiche: i poligoni possono avere qualsiasi numero di spigoli e non è detto che ci sia un solo tipo di poligono. Sono raramente utilizzate in grafica al calcolatore Quadrangolari (quad meshes): gli elementi poligonali sono tutti quadrilateri. Sono alle volte usate, per esempio se si vuole fare il rendering di un terreno descritto da un array di altezze. In una maglia quadrangolare bisogna imporre un vincolo aggiuntivo di planarità per ogni quadrilatero che la compone. OpenGL consente di descrivere maglie poligonali generiche, ma per disegnarle li suddivide usualmente in triangoli. 31
 Il genere di una superficie determina")
32 Equazione di Eulero Se V è il numero di vertici, L il numero di spigoli ed F il numero di facce della maglia poligonale orientabile chiusa di genere G, allora vale la Formula di Eulero V - L + F = 2-2G Una superficie ha genere G se può essere tagliata lungo G linee semplici chiuse senza disconnetterla (intuitivamente, ma non rigorosamente numero di buchi ) Il genere di una superficie determina la sua topologia; per una sfera, per esempio, G = 0, mentre per un toro (una ciambella) G = 1. Più in generale, per una maglia poligonale orientabile (e varietà bidimensionale) vale la formula V - L + F = 2(S G) B S numero di componenti connesse, B è il numero di anelli di bordo 32
33 Mesh di triangoli Nella pratica sono il tipo di modello dominante Usato nella gran parte delle applicazioni interattive Dato che il rendering è ottimizzato in hardware 33



 Il numero di")

34 Mesh di triangoli Generate da modellazione CAD, acquisizione con scanner, ricostruzione da immagini (Computer Vision) Il numero di poligoni determina il dettaglio, ma il costo in memoria può essere notevole 34


35 Costruzione della mesh triangolare Conversione da altri formati: Poligoni Triangoli Superf. Quadriche Triangoli Campi di altezze o Punti Triangoli 35
36 Mesh triangolare - Attributi Posso definirli: per vertice esplicito un attributo per ogni vertice per faccia esplicito un attributo per ogni faccia per wedge (vertice di faccia) esplicito tre attributi per ogni faccia Attributi più comuni: colore coordinate texture normali 36


 by M.")
37 Mesh triangolare - Limiti Non è sempre semplice modellare le entità da rappresentare con triangoli... Esempi: Nuvole Fiamme Capelli, pelliccia by Niniane Wang (non real time) by N. Adabala Florida Uni (non real time) by M. Turitzin and J. Jacobs Stanford Uni (real time!) 37
38 Evitare ridondanze Quando si devono disegnare due triangoli con uno spigolo in comune, questo viene disegnato due volte. Questo introduce un certo grado di ridondanza che può incidere sulle prestazioni Si preferisce quindi raggruppare i triangoli di una maglia in opportuni gruppi che possono essere elaborati in maniere più efficiente. Si possono ad esempio utilizzare Fan di triangoli: è un gruppo di triangoli che hanno in comune un vertice. Il primo viene specificato completamente, per i successivi basta dare il nuovo vertice. Efficiente, ma i triangoli che incidono su un vertice sono in genere pochi Strip di triangoli: gruppo di triangoli che posseggono a due a due uno spigolo in comune. Di nuovo il primo triangolo viene specificato normalmente, per i successivi basta specificare il nuovo vertice. Meno efficiente, ma le strip in genere contengono più triangoli delle fan 38
39 Strip e fan Esistono algoritmi per creare queste rappresentazioni dalle mesh 39
40 Mesh e rendering Per determinare l effetto di una qualsiasi trasformazione affine su un oggetto (traslazione, rotazione, scalatura, composizioni varie di queste), basta applicare la trasformazione ai vertici (che sono punti); le informazioni connettive date dagli spigoli non cambiano in questo tipo di trasformazioni Questo rende piuttosto semplice il rendering di oggetti descritti in termini di maglie poligonali. qualsiasi trasformazione viene eseguita sui vertici, cioè si tratta di applicare trasformazioni affini su punti L affermazione precedente è vera anche per la proiezione; per vedere come si proietta la forma di una maglia su un piano (l immagine), basta seguire la proiezione dei vertici. 40
41 Memorizzazione Alla creazione dei modelli vengono in genere generati nodi, connettività e attributi. Gli algoritmi di processing e rendering devono accedere in vario modo a tale informazione Diversi modi di rappresentare questa informazione Nei programmi applicativi sono quindi necessarie delle procedure per convertire una rappresentazione in un altra Progettare ed implementare tali procedure è un ottimo modo per capire nel dettaglio le varie rappresentazioni utilizzate per descrivere maglie poligonali Nei disegni e negli esempi ci concentreremo sul caso di maglia triangolare, ma il discorso è valido in generale per tutti i poligoni convessi 41
42 Elementi base Vertici: sono gli elementi 0 dimensionali e sono identificabili con punti nello spazio 3D (essenzialmente tre coordinate); alle volte può essere utile associare ai vertici altre caratteristiche oltre alla posizione (tipo il colore) Spigoli: sono elementi 1 dimensionali e rappresentano un segmento che unisce due vertici. Di solito non contengono altre informazioni. Facce: sono i poligoni bidimensionali, formati da un certo numero di spigoli e di vertici (dimostrare che sono in numero uguale). I vertici o gli spigoli si usano per identificare la faccia; possono contenere altre informazioni (tipo il colore) 42



43 Elementi base Normali: è fondamentale sapere quale è l esterno della superficie e quale l interno, e qual è l'orientazione locale della superficie; a tal scopo si associa spesso ad una maglia poligonale anche l informazione sulla normale uscente. La normale n ad una faccia è data dal prodotto vettore di due suoi spigoli consecutivi non collineari attenti al verso: la normale è uscente dal fronte della faccia Per un triangolo (V1,V2,V3) si ha: n = (V3-V2)x(V1-V2). 43
44 Normali sui vertici Posso fare una media (pesata) delle normali delle facce. Pesi? Uniformi? ( 1) Area? T Angolo? AIDV 2015/16 44
45 Normali e trasformazioni Attenzione (vedremo in lab): ci servono le normali per calcolare il modello di Phong. Le possiamo calcolare per i modelli, cui poi sono applicate le trasformazioni geometriche e di proiezione Ma se applichiamo trasformazioni generiche ai modelli queste trasformazioni non preservano necessariamente l'ortogonalità di normale e superficie. P n MP Mn 45
46 Dovremo... Per trasformare senza questo problema le normali possiamo trasformarle con una matrice diversa Consideriamo un vettore tangente t alla superficie ntt =0 nm-1mt=0-1 T (M ) nmt=0 Quindi la normale trasformato da (M-1)Tn è perpendicolare alla superficie trasformata. Cioè per evitare problemi si trasformeranno le normali con l'inversa trasposta della matrice di trasformazione del modello 46
47 Struttura della mesh I vertici danno informazioni di tipo posizionale, gli spigoli informazioni di tipo connettivo (non c'è informazione spaziale) Gli spigoli connettono i vertici, permettendo di introdurre un concetto di vicinanza tra vertici e dando le informazioni di tipo topologico (ovvero definiscono un grafo) Le facce sono determinate una volta dati i vertici e gli spigoli, quindi non introducono nulla Al più possono avere associati attributi, anche se è raro 47
48 Strutture dati per le mesh Ci sono vari modi di conservare le informazioni sui modelli. Questi possono differire per Memoria occupata Complessità di implementazione di operazioni di ricerca (es. ricerche di adiacenza Quali sono i vertici vicini a uno dato? Quali sono gli spigoli che contengono un vertice dato? Quali sono le facce che contengono uno spigolo? Possibilità di controllo sulla qualità delle superfici (es. manifoldness) 48
49 Strutture semplici: lista triangoli e indexed Immediata: specificare tutte le facce della maglia come terne di triplette di coordinate cartesiane Spreco di memoria: duplico le coordinate. Meglio usare una struttura indicizzata, con la lista dei vertici e la lista delle facce con i puntatori ai vertici (indici) Normalmente usate in opengl per il rendering Non ottimali per le ricerche typedef struct { float v1[3]; float v2[3]; float v3[3];} faccia; typedef struct { float x,y,z; } vertice; typedef struct { vertice* v1,v2,v3; } faccia; 49
50 Winged edge (Baugmart 1975) Si aggiungono dei puntatori allo spigolo per rendere più semplice l analisi delle incidenze. L elemento base è lo spigolo (edge) con le typedef sue due facce incidenti (wings) Lo spigolo l2 contiene un puntatore ai due vertici su cui incide (b; c), alle due facce su cui incide (T1, T2) ed ai due spigoli uscenti da ciascun vertice Un vertice contiene un puntatore ad uno degli spigoli che incide su di esso, più le coordinate (ed altro) La faccia contiene un puntatore ad uno degli spigoli che vi incide (ed altro). La struttura assume che ogni spigolo non di bordo abbia due facce incidenti (manifold) struct { we_vertice* v_ini, v_fin; we_spigolo* vi_sin, vi_dstr; we_spigolo* vf_sin, vf_dstr; we_faccia* f_sin, f_dstr; } we_spigolo; typedef struct { float x, y, z; we_spigolo* spigolo; } we_vertice; typedef struct { we_spigolo* spigolo; 50 } we_faccia;
51 Half edge Ogni spigolo viene diviso in due spigoli orientati in modo opposto Ciascun mezzo spigolo contiene un puntatore al vertice iniziale, alla faccia a cui appartiene, al mezzo spigolo successivo (seguendo l ordinamento) ed al mezzo spigolo gemello Ogni vertice, oltre alle coordinate (e attributi) contiene un puntatore ad uno qualsiasi dei mezzi spigoli che esce da tale vertice Ogni faccia contiene uno dei suoi mezzi spigoli (oltre ad altre caratteristiche quali, ad esempio, la normale) Efficiente per le ricerche ed elegante typedef struct { he_vertice* origine; he_spigolo* gemello; he_faccia* faccia; he_spigolo* successivo; } he_spigolo; typedef struct { float x, y, z; he_spigolo* spigolo; } he_vertice; typedef struct { he_spigolo* spigolo; } he_faccia; 51
52 Note La stessa applicazione grafica può far uso di più di una struttura dati La rappresentazione con la lista di vertici essendo semplice e leggera è tipicamente usata come formato per i file contenenti la geometria di oggetti Le applicazioni grafiche in genere caricano tali file ed usano l informazione contenuta in essi per riempire una struttura dati più utile ai fini algoritmici (per esempio la half-edge) 52
53 Esercizi descrivere una procedura che, data una rappresentazione winged-edge di una maglia triangolare, stampi tutti le facce incidenti su un dato vertice v, assumendo data una procedura stampafaccia(we faccia *f) descrivere una procedura che, data una rappresentazione halfedge di una maglia triangolare, stampi tutti i mezzi-spigoli uscenti dal vertice v con una procedura stampaspigolo(he spigolo *l) 53

54 Formati per mesh Esempio.off, obj,.ply,.wrl, x3d,.mesh Possono supportare anche diversi tipi di primitive, scene graph Esempio.off OFF

55 Qualità delle mesh Manifoldness Risoluzione. Numero di triangoli/poligoni Accuratezza nell'approssimazione Attenzione: se la geometria sottostante è semplice, i triangoli possono essere inutili Algoritmi di semplificazione Curvature e normali La loro qualità influirà poi sugli algoritmi di illuminazione 55

56 Meshlab Strumento open source ottimo per il processing di mesh con algoritmi di analisi e processing moderni 56
57 Riferimenti Wikipedia voce polygon mesh Angel cap
58 Domande di verifica Cosa si intende per Constructive Solid Geometry? Cos'è una mesh di poligoni? Cosa si intende per mesh orientabile? Cosa si intende per varietà (2-manifold) Come si può ridurre la complessità di una mesh? 58
Fondamenti di Grafica al calcolatore
 Fondamenti di Grafica al calcolatore 2b Modellazione (cenni) 1 Cose da fare Modellare lo spazio Modellare gli oggetti nello spazio Modellare la telecamera virtuale Modellare l'interazione luce-materia
Fondamenti di Grafica al calcolatore 2b Modellazione (cenni) 1 Cose da fare Modellare lo spazio Modellare gli oggetti nello spazio Modellare la telecamera virtuale Modellare l'interazione luce-materia
Grafica al calcolatore - Computer Graphics
 Grafica al calcolatore - Computer Graphics 4 - Modellazione 20/10/12 Grafica 2013 1 Geometria Ci interessa definire nello spazio le figure geometriche importanti dal punto di vista della modellazione grafica
Grafica al calcolatore - Computer Graphics 4 - Modellazione 20/10/12 Grafica 2013 1 Geometria Ci interessa definire nello spazio le figure geometriche importanti dal punto di vista della modellazione grafica
RUOLO DELLA MODELLAZIONE GEOMETRICA PARTE IN QUESTA LEZIONE E LIVELLI DI MODELLAZIONE. Prof. Daniele Regazzoni
 RUOLO DELLA MODELLAZIONE GEOMETRICA E LIVELLI DI MODELLAZIONE PARTE 2 Prof. Daniele Regazzoni... IN QUESTA LEZIONE Modelli 2D/3D Modelli 3D/3D Dimensione delle primitive di modellazione Dimensione dell
RUOLO DELLA MODELLAZIONE GEOMETRICA E LIVELLI DI MODELLAZIONE PARTE 2 Prof. Daniele Regazzoni... IN QUESTA LEZIONE Modelli 2D/3D Modelli 3D/3D Dimensione delle primitive di modellazione Dimensione dell
Grafica al Calcolatore Modelllazione geometrica - 1
 Grafica al Calcolatore Modelllazione geometrica - 1 Ora che abbiamo a disposizione gli strumenti matematici, geometrici ed algoritmici necessari, iniziamo a occuparci con questo capitolo di grafica 3D
Grafica al Calcolatore Modelllazione geometrica - 1 Ora che abbiamo a disposizione gli strumenti matematici, geometrici ed algoritmici necessari, iniziamo a occuparci con questo capitolo di grafica 3D
Grafica al calcolatore Computer Graphics
 Grafica al calcolatore Computer Graphics 4 - Modellazione 1 Modellazione Definiamo ora possibili strutture dati per modellare gli oggetti nello spazio. Poi vedremo come modellare anche la formazione delle
Grafica al calcolatore Computer Graphics 4 - Modellazione 1 Modellazione Definiamo ora possibili strutture dati per modellare gli oggetti nello spazio. Poi vedremo come modellare anche la formazione delle
Computer Graphics. Digital representation of 3D objects. 3D Rendering. Scena 3D rendering image. Marco Tarini - univ insubria AA 2016/2017
 Computer Graphics Digital representation of 3D objects Università dell Insubria Facoltà di Scienze MFN di Varese Corso di Laurea in Informatica Anno Accademico 2016/17 Marco Tarini 3D Rendering Scena 3D
Computer Graphics Digital representation of 3D objects Università dell Insubria Facoltà di Scienze MFN di Varese Corso di Laurea in Informatica Anno Accademico 2016/17 Marco Tarini 3D Rendering Scena 3D
Modellazione. Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale.
 Modellazione Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale. Rappresentazione poligonale Curve e superfici Geometria Solida Costruttiva Suddivisione
Modellazione Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale. Rappresentazione poligonale Curve e superfici Geometria Solida Costruttiva Suddivisione
Modelllazione geometrica
 Modelllazione geometrica Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale. Rappresentazione poligonale Curve e superfici Geometria Costruttiva
Modelllazione geometrica Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale. Rappresentazione poligonale Curve e superfici Geometria Costruttiva
Grafica al calcolatore. Computer Graphics. 4 - Modellazione 21/10/13
 Grafica al calcolatore Computer Graphics 4 - Modellazione 1 Modellazione Definiamo ora possibili strutture dati per modellare gli oggetti nello spazio. Poi vedremo come modellare anche la formazione delle
Grafica al calcolatore Computer Graphics 4 - Modellazione 1 Modellazione Definiamo ora possibili strutture dati per modellare gli oggetti nello spazio. Poi vedremo come modellare anche la formazione delle
Corso di Grafica Computazionale
 Corso di Grafica Computazionale Rappresentazione di Oggetti Tridimensionali Docente: Massimiliano Corsini Laurea Specialistica in Ing. Informatica Università degli Studi di Siena Superfici di Suddivisione
Corso di Grafica Computazionale Rappresentazione di Oggetti Tridimensionali Docente: Massimiliano Corsini Laurea Specialistica in Ing. Informatica Università degli Studi di Siena Superfici di Suddivisione
Fondamenti di Grafica al calcolatore
 Fondamenti di Grafica al calcolatore 3 - Modellazione di oggetti e scene andrea.giachetti@univr.it FCG Master CGD 2018 1 Modellazione Due problemi da affrontare nelle applicazioni grafiche Modellazione
Fondamenti di Grafica al calcolatore 3 - Modellazione di oggetti e scene andrea.giachetti@univr.it FCG Master CGD 2018 1 Modellazione Due problemi da affrontare nelle applicazioni grafiche Modellazione
Geometria euclidea. Alessio del Vigna
 Geometria euclidea Alessio del Vigna La geometria euclidea è una teoria fondata su quattro enti primitivi e sulle relazioni che tra essi intercorrono. I quattro enti primitivi in questione sono il punto,
Geometria euclidea Alessio del Vigna La geometria euclidea è una teoria fondata su quattro enti primitivi e sulle relazioni che tra essi intercorrono. I quattro enti primitivi in questione sono il punto,
Geometria euclidea. Alessio del Vigna. Lunedì 15 settembre
 Geometria euclidea Alessio del Vigna Lunedì 15 settembre La geometria euclidea è una teoria fondata su quattro enti primitivi e sulle relazioni che tra essi intercorrono. I quattro enti primitivi in questione
Geometria euclidea Alessio del Vigna Lunedì 15 settembre La geometria euclidea è una teoria fondata su quattro enti primitivi e sulle relazioni che tra essi intercorrono. I quattro enti primitivi in questione
Prisma retto. Generatrice. Direttrice. Prisma obliquo. Nel caso le generatrici non siano parallele. Generatrice
 Oggetti (identificati) nello spazio Una porzione di piano delimitata da una linea spezzata chiusa si chiama poligono, un solido delimitato da un numero finito di facce piane si chiama poliedro. In un poliedro
Oggetti (identificati) nello spazio Una porzione di piano delimitata da una linea spezzata chiusa si chiama poligono, un solido delimitato da un numero finito di facce piane si chiama poliedro. In un poliedro
Lezione 11: Solidi, superfici e proiezioni. Le proiezioni. Le proiezioni. Le proiezioni. Le proiezioni. Le proiezioni
 Le proiezioni Lezione 11: Solidi, superfici e proiezioni Lo schermo del calcolatore e' in grado di visualizzare immagini bidimensionali. In grafica 3D si modellano oggetti in tre dimensioni. Le proiezioni
Le proiezioni Lezione 11: Solidi, superfici e proiezioni Lo schermo del calcolatore e' in grado di visualizzare immagini bidimensionali. In grafica 3D si modellano oggetti in tre dimensioni. Le proiezioni
Geometria Solida Costruttiva (CSG)
") Geometria Solida Costruttiva (CSG) Seminario di Elementi di Grafica Digitale 25/05/2005 Davide Prade Geometria Solida Costruttiva (CSG) 1 Introduzione Oggetti reali e virtuali possono essere rappresentati
Geometria Solida Costruttiva (CSG) Seminario di Elementi di Grafica Digitale 25/05/2005 Davide Prade Geometria Solida Costruttiva (CSG) 1 Introduzione Oggetti reali e virtuali possono essere rappresentati
Corso di Grafica Computazionale
 Corso di Grafica Computazionale Real-Time Rendering Introduzione all hardware grafico Docente: Massimiliano Corsini Laurea Specialistica in Ing. Informatica Università degli Studi di Siena Hardware Grafico
Corso di Grafica Computazionale Real-Time Rendering Introduzione all hardware grafico Docente: Massimiliano Corsini Laurea Specialistica in Ing. Informatica Università degli Studi di Siena Hardware Grafico
ISTITUTO SAN GABRIELE CLASSI 4 S - 4 SA PROF. ANDREA PUGLIESE GEOMETRIA EUCLIDEA NELLO SPAZIO
 ISTITUTO SAN GABRIELE CLASSI 4 S - 4 SA PROF. ANDREA PUGLIESE GEOMETRIA EUCLIDEA NELLO SPAZIO GEOMETRIA NELLO SPAZIO Gli enti fondamentali sono punto, retta, piano, e spazio. Con le lettere maiuscole (A,B,C,...)
ISTITUTO SAN GABRIELE CLASSI 4 S - 4 SA PROF. ANDREA PUGLIESE GEOMETRIA EUCLIDEA NELLO SPAZIO GEOMETRIA NELLO SPAZIO Gli enti fondamentali sono punto, retta, piano, e spazio. Con le lettere maiuscole (A,B,C,...)
Geometria della programmazione lineare
 Geometria della programmazione lineare p. 1/39 Geometria della programmazione lineare Mariantonia Cotronei Facoltà di Ingegneria Università degli Studi Mediterranea di Reggio Calabria Geometria della programmazione
Geometria della programmazione lineare p. 1/39 Geometria della programmazione lineare Mariantonia Cotronei Facoltà di Ingegneria Università degli Studi Mediterranea di Reggio Calabria Geometria della programmazione
Basi di Dati Spaziali
 Corso di Basi di Dati Spaziali Rappresentazione di oggetti spaziali Angelo Montanari Donatella Gubiani Modelli dei dati spaziali e modi di rappresentazione Esistono varie modalità di modellazione e rappresentazione
Corso di Basi di Dati Spaziali Rappresentazione di oggetti spaziali Angelo Montanari Donatella Gubiani Modelli dei dati spaziali e modi di rappresentazione Esistono varie modalità di modellazione e rappresentazione
Modellizzazione di dati geografici
 Paolo Zatelli Dipartimento di Ingegneria Civile e Ambientale Università di Trento 1/51 Dato geografico aspetto spaziale (geometria/topologia) coordinate+primitive geometriche (sist. di rif.+proiez.+scala
Paolo Zatelli Dipartimento di Ingegneria Civile e Ambientale Università di Trento 1/51 Dato geografico aspetto spaziale (geometria/topologia) coordinate+primitive geometriche (sist. di rif.+proiez.+scala
Quando si parla di diedro tra due semipiani, si intende. quello convesso (che non contiene il prolungamento. sono paralleli i rispettivi piani
 Diedri Siano dati due semipiani nello spazio, α e β, aventi per origine la stessa retta r. Essi dividono lo spazio in due regioni, ciascuna delle quali si chiama diedro. I due semipiani sono le facce del
Diedri Siano dati due semipiani nello spazio, α e β, aventi per origine la stessa retta r. Essi dividono lo spazio in due regioni, ciascuna delle quali si chiama diedro. I due semipiani sono le facce del
Rappresentazione di oggetti 3D
 Rappresentazione di oggetti 3D 1 Modellazione geometrica La modellazione geometrica riguarda le tecniche di rappresentazione di curve e superfici Surface modeling Rappresentazione della superficie di un
Rappresentazione di oggetti 3D 1 Modellazione geometrica La modellazione geometrica riguarda le tecniche di rappresentazione di curve e superfici Surface modeling Rappresentazione della superficie di un
Grafica al Calcolatore Rendering volumetrico - 1. Introduzione
 Grafica al Calcolatore Rendering volumetrico - 1 Introduzione Grafica al Calcolatore Rendering volumetrico - 2 Studieremo sono due tecniche base per la visualizzazione di dati volumetrici: Rendering volumetrico
Grafica al Calcolatore Rendering volumetrico - 1 Introduzione Grafica al Calcolatore Rendering volumetrico - 2 Studieremo sono due tecniche base per la visualizzazione di dati volumetrici: Rendering volumetrico
La modellazione tridimensionale
 La modellazione tridimensionale Uso delle tecniche di grafica al calcolatore (Computer Graphics) per rappresentare in modo tridimensionale un oggetto o manufatto. 1/31 La rappresentazione 3D e la simulazione
La modellazione tridimensionale Uso delle tecniche di grafica al calcolatore (Computer Graphics) per rappresentare in modo tridimensionale un oggetto o manufatto. 1/31 La rappresentazione 3D e la simulazione
Esercizi di Geometria e Algebra per Ingegneria Aerospaziale (nuovo ordinamento)
") Esercizi di Geometria e Algebra per Ingegneria Aerospaziale (nuovo ordinamento) Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile per 17
Esercizi di Geometria e Algebra per Ingegneria Aerospaziale (nuovo ordinamento) Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile per 17
METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA. Lezione n 11
 METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA Lezione n 11 In questa lezione percorriamo gli argomenti della geometria che interessano la scuola primaria, in modo essenziale, o meglio ancora
METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA Lezione n 11 In questa lezione percorriamo gli argomenti della geometria che interessano la scuola primaria, in modo essenziale, o meglio ancora
RETTE E PIANI NELLO SPAZIO
 VETTORI E GEOMETRIA ANALITICA 1 RETTE E PIANI NELLO SPAZIO Rette e piani in forma cartesiana e parametrica. Parallelismo e perpendicolarità, posizioni reciproche tra rette e piani, distanze. Esercizio
VETTORI E GEOMETRIA ANALITICA 1 RETTE E PIANI NELLO SPAZIO Rette e piani in forma cartesiana e parametrica. Parallelismo e perpendicolarità, posizioni reciproche tra rette e piani, distanze. Esercizio
Modellazione. Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale.
 Modellazione Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale. Rappresentazione poligonale Curve e superfici Gometria Solida Costruttiva Suddivisione
Modellazione Dove si delineano le principali tecniche per descrivere e rappresentare oggetti in uno spazio tridimensionale. Rappresentazione poligonale Curve e superfici Gometria Solida Costruttiva Suddivisione
Esercizi complementari
 Esercizi complementari (tratti dagli esercizi del prof. Alberto Del Fra) Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile per 17 x, y
Esercizi complementari (tratti dagli esercizi del prof. Alberto Del Fra) Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile per 17 x, y
Intersezioni e collisioni
 Intersezioni e collisioni Dove si descrivono i principali algoritmi per verificare l intersezione tra oggetti geometrici o rilevarne la collisione Introduzione Richiami di geometria analitica Intersezioni
Intersezioni e collisioni Dove si descrivono i principali algoritmi per verificare l intersezione tra oggetti geometrici o rilevarne la collisione Introduzione Richiami di geometria analitica Intersezioni
Soluzioni esercizi complementari
 Soluzioni esercizi complementari Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile per 17 x, y Z xry x y X, Y sottoinsiemi di un insieme
Soluzioni esercizi complementari Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile per 17 x, y Z xry x y X, Y sottoinsiemi di un insieme
DIEDRI. Un diedro è convesso se è una figura convessa, concavo se non lo è.
 DIEDRI Si definisce diedro ciascuna delle due parti di spazio delimitate da due semipiani che hanno la stessa origine, compresi i semipiani stessi. I due semipiani prendono il nome di facce del diedro
DIEDRI Si definisce diedro ciascuna delle due parti di spazio delimitate da due semipiani che hanno la stessa origine, compresi i semipiani stessi. I due semipiani prendono il nome di facce del diedro
ma... Computer Graphics Rasterization-based HW-supported rendering Lezione 3: modellare con triangoli Tutto sia composto da triangoli (3D)
") Computer Graphics Leione 3: modellare con triangoli Università dell Insubria Facoltà di Sciene MFN di Varese Corso di Laurea in Informatica Anno Accademico 01/13 Rasteriation-based HW-supported rendering
Computer Graphics Leione 3: modellare con triangoli Università dell Insubria Facoltà di Sciene MFN di Varese Corso di Laurea in Informatica Anno Accademico 01/13 Rasteriation-based HW-supported rendering
Grafica al calcolatore - Computer Graphics
 Grafica al calcolatore - Computer Graphics 5 - Rendering 29/10/12 Grafica 2013 1 Rendering Il termine rendering indica la serie di algoritmi, geometrici e non, a cui si sottopone una data descrizione di
Grafica al calcolatore - Computer Graphics 5 - Rendering 29/10/12 Grafica 2013 1 Rendering Il termine rendering indica la serie di algoritmi, geometrici e non, a cui si sottopone una data descrizione di
ma... Computer Graphics Rasterization-based HW-supported rendering Lezione 3: modellare con triangoli Tutto sia composto da triangoli (3D)
") Computer Graphics Leione : modellare con triangoli Università dell Insubria Facoltà di Sciene MFN di Varese Corso di Laurea in Informatica Anno Accademico 011/1 Rasteriation-based HW-supported rendering
Computer Graphics Leione : modellare con triangoli Università dell Insubria Facoltà di Sciene MFN di Varese Corso di Laurea in Informatica Anno Accademico 011/1 Rasteriation-based HW-supported rendering
rappresenta il piano perpendicolare al vettore è il piano perpendicolare al vettore
 SUPERFICI NOTEVOLI PIANO Una qualunque equazione lineare nello spazio ax by cz d rappresenta il piano perpendicolare al vettore rappresenta un piano. In particolare l equazione abc,, che interseca gli
SUPERFICI NOTEVOLI PIANO Una qualunque equazione lineare nello spazio ax by cz d rappresenta il piano perpendicolare al vettore rappresenta un piano. In particolare l equazione abc,, che interseca gli
Grafica al Calcolatore Fondamenti - 1. Spazi vettoriali ed affini
 Grafica al Calcolatore Fondamenti - 1 Spazi vettoriali ed affini Grafica al Calcolatore Fondamenti - 2 Scalari Grafica al Calcolatore Fondamenti - 3 Vettori Grafica al Calcolatore Fondamenti - 4 Un esempio
Grafica al Calcolatore Fondamenti - 1 Spazi vettoriali ed affini Grafica al Calcolatore Fondamenti - 2 Scalari Grafica al Calcolatore Fondamenti - 3 Vettori Grafica al Calcolatore Fondamenti - 4 Un esempio
Sistemi Informativi Territoriali
 ANNO ACCADEMICO 2002-2003 SISTEMI INFORMATIVI GEOGRAFICI (SIT) GEOGRAPHICAL INFORMATION SYSTEMS (GIS) Sistemi Informativi Territoriali 2. La progettazione concettuale: il modello GEO-ER ALBERTO BELUSSI
ANNO ACCADEMICO 2002-2003 SISTEMI INFORMATIVI GEOGRAFICI (SIT) GEOGRAPHICAL INFORMATION SYSTEMS (GIS) Sistemi Informativi Territoriali 2. La progettazione concettuale: il modello GEO-ER ALBERTO BELUSSI
ENTI GEOMETRICI FONDAMENTALI
 ENTI GEOMETRICI FONDAMENTALI Gli enti geometrici fondamentali sono tre: il punto, la retta ed il piano. I punti vengono indicate con le lettere dell alfabeto maiuscole (A,B,C, ), le rette con le lettere
ENTI GEOMETRICI FONDAMENTALI Gli enti geometrici fondamentali sono tre: il punto, la retta ed il piano. I punti vengono indicate con le lettere dell alfabeto maiuscole (A,B,C, ), le rette con le lettere
Eulero e i poliedri V + F - S = 2. è nota la relazione. V = numero dei vertici. F = numero delle facce. S = numero degli spigoli. perché?
 1 Eulero e i poliedri è nota la relazione V + F - S = 2 V = numero dei vertici F = numero delle facce S = numero degli spigoli perché? per quali poliedri? conseguenze? 2 Perché V + F - S = 2? Vari modi
1 Eulero e i poliedri è nota la relazione V + F - S = 2 V = numero dei vertici F = numero delle facce S = numero degli spigoli perché? per quali poliedri? conseguenze? 2 Perché V + F - S = 2? Vari modi
matematico funzioni parametriche parametro
 Definizione di curve Si usano quindi delle reali curve (in senso matematico): funzioni parametriche di tipo analitico le funzioni parametriche hanno un valore che varia al variare di un parametro t al
Definizione di curve Si usano quindi delle reali curve (in senso matematico): funzioni parametriche di tipo analitico le funzioni parametriche hanno un valore che varia al variare di un parametro t al
GEOMETRIA ANALITICA NELLO SPAZIO (3D Geometry)
") GEOMETRIA ANALITICA NELLO SPAZIO (3D Geometry) SISTEMA DI RIFERIMENTO NELLO SPAZIO La geometria analitica dello spazio è molto simile alla geometria analitica del piano. Per questo motivo le formule sono
GEOMETRIA ANALITICA NELLO SPAZIO (3D Geometry) SISTEMA DI RIFERIMENTO NELLO SPAZIO La geometria analitica dello spazio è molto simile alla geometria analitica del piano. Per questo motivo le formule sono
Grafica al Calcolatore Tecniche di mappatura - 1. Introduzione
 Grafica al Calcolatore Tecniche di mappatura - 1 Introduzione Grafica al Calcolatore Tecniche di mappatura - 2 Texture mapping Grafica al Calcolatore Tecniche di mappatura - 3 La texture può essere applicata
Grafica al Calcolatore Tecniche di mappatura - 1 Introduzione Grafica al Calcolatore Tecniche di mappatura - 2 Texture mapping Grafica al Calcolatore Tecniche di mappatura - 3 La texture può essere applicata
Matematica per Analisi dei Dati,
 Matematica per Analisi dei Dati, 230209 1 Spazio vettoriale R n Sia n un intero positivo fissato Lo spazio vettoriale R n e l insieme delle n ple ordinate di numeri reali, che rappresenteremo sempre come
Matematica per Analisi dei Dati, 230209 1 Spazio vettoriale R n Sia n un intero positivo fissato Lo spazio vettoriale R n e l insieme delle n ple ordinate di numeri reali, che rappresenteremo sempre come
FONDAMENTI DI GEOMETRIA
 1 FONDAMENTI DI GEOMETRIA (Fundamental geometrical concepts) La geometria [ghè (terra) metron (misura)] è una parte della matematica che studia lo spazio, la forma, l estensione, la trasformazione delle
1 FONDAMENTI DI GEOMETRIA (Fundamental geometrical concepts) La geometria [ghè (terra) metron (misura)] è una parte della matematica che studia lo spazio, la forma, l estensione, la trasformazione delle
La Retta Ogni funzione di primo grado rappresenta, graficamente, una retta. L equazione della retta può essere scritta in due modi
 La Retta Ogni funzione di primo grado rappresenta, graficamente, una retta. L equazione della retta può essere scritta in due modi Forma implicita Forma esplicita a x b y c 0 y m x q a c y x b b Esempio
La Retta Ogni funzione di primo grado rappresenta, graficamente, una retta. L equazione della retta può essere scritta in due modi Forma implicita Forma esplicita a x b y c 0 y m x q a c y x b b Esempio
Lezione 6 Richiami di Geometria Analitica
 1 Piano cartesiano Lezione 6 Richiami di Geometria Analitica Consideriamo nel piano due rette perpendicolari che si intersecano in un punto O Consideriamo ciascuna di queste rette come retta orientata
1 Piano cartesiano Lezione 6 Richiami di Geometria Analitica Consideriamo nel piano due rette perpendicolari che si intersecano in un punto O Consideriamo ciascuna di queste rette come retta orientata
LA GEOMETRIA DELLO SPAZIO: CENNI DI TEORIA ED ESERCIZI
 LA GEOMETRIA DELLO SPAZIO: CENNI DI TEORIA ED ESERCIZI SPAZIO: l insieme di tutti i punti. PUNTI ALLINEATI: punti che appartengono alla stessa retta PUNTI COMPLANARI: punti che appartengono allo stesso
LA GEOMETRIA DELLO SPAZIO: CENNI DI TEORIA ED ESERCIZI SPAZIO: l insieme di tutti i punti. PUNTI ALLINEATI: punti che appartengono alla stessa retta PUNTI COMPLANARI: punti che appartengono allo stesso
Vettori e geometria analitica in R 3 1 / 25
 Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
Vettori e geometria analitica in R 3 1 / 25 Sistemi di riferimento in R 3 e vettori 2 / 25 In fisica, grandezze fondamentali come forze, velocità, campi elettrici e magnetici vengono convenientemente descritte
METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA. Lezione n 10
 METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA Lezione n 10 In questa lezione percorriamo gli argomenti della geometria che interessano la scuola primaria, in modo essenziale, o meglio ancora
METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA Lezione n 10 In questa lezione percorriamo gli argomenti della geometria che interessano la scuola primaria, in modo essenziale, o meglio ancora
Non solo mesh. Height Map. Or: Height Field Or: 2.5 Dataset. Non di sole mesh vive la CG. Curisosità: physical height maps.
 Non solo mesh Non di sole mesh vive la CG Height Map Or: Height Field Or: 2.5 Dataset float[resx][resy] heightmap; Height Map Curisosità: physical height maps (CGI) (real) Gray-scale image, interpreted
Non solo mesh Non di sole mesh vive la CG Height Map Or: Height Field Or: 2.5 Dataset float[resx][resy] heightmap; Height Map Curisosità: physical height maps (CGI) (real) Gray-scale image, interpreted
Geometria razionale (o euclidea)
") Geometria razionale (o euclidea) La geometria studia le figure geometriche e le loro proprietà. E una scienza che ha origini antichissime: civiltà egiziane e babilonesi La parola significa misura della
Geometria razionale (o euclidea) La geometria studia le figure geometriche e le loro proprietà. E una scienza che ha origini antichissime: civiltà egiziane e babilonesi La parola significa misura della
ˆ b, si usa la convenzione di prendere. come verso positivo quello antiorario e come verso negativo quello orario.
 Capitolo 4 Le rotazioni 4.1 Richiami di teoria E' opportuno ricordare che, dato un angolo orientato ao ˆ b, si usa la convenzione di prendere come verso positivo quello antiorario e come verso negativo
Capitolo 4 Le rotazioni 4.1 Richiami di teoria E' opportuno ricordare che, dato un angolo orientato ao ˆ b, si usa la convenzione di prendere come verso positivo quello antiorario e come verso negativo
Geometria euclidea dello spazio Presentazione n. 5 Poliedri Prof. Daniele Ippolito Liceo Scientifico Amedeo di Savoia di Pistoia
 Geometria euclidea dello spazio Presentazione n. 5 Poliedri Prof. Daniele Ippolito Liceo Scientifico Amedeo di Savoia di Pistoia Poliedri Un poliedro è un solido delimitato da una superficie formata da
Geometria euclidea dello spazio Presentazione n. 5 Poliedri Prof. Daniele Ippolito Liceo Scientifico Amedeo di Savoia di Pistoia Poliedri Un poliedro è un solido delimitato da una superficie formata da
Kangourou della Matematica 2012 finale nazionale italiana Mirabilandia, 7 maggio 2012
 Kangourou della Matematica 2012 finale nazionale italiana Mirabilandia, 7 maggio 2012 LIVELLO STUDENT S1. (5 punti ) Assegnati tre punti non allineati nello spazio, quante sfere passano per questi tre
Kangourou della Matematica 2012 finale nazionale italiana Mirabilandia, 7 maggio 2012 LIVELLO STUDENT S1. (5 punti ) Assegnati tre punti non allineati nello spazio, quante sfere passano per questi tre
Geometria BAER Canale I Esercizi 10
 Geometria BAER Canale I Esercizi 10 Esercizio 1. Data la retta x = t r : y = t z = 1 si trovi il punto A di r tale che l angolo di r con il vettore AO sia π/2, e il punto B di r tale che l angolo di r
Geometria BAER Canale I Esercizi 10 Esercizio 1. Data la retta x = t r : y = t z = 1 si trovi il punto A di r tale che l angolo di r con il vettore AO sia π/2, e il punto B di r tale che l angolo di r
Piano cartesiano e retta
 Piano cartesiano e retta Il punto, la retta e il piano sono concetti primitivi di cui non si da una definizione rigorosa, essi sono i tre enti geometrici fondamentali della geometria euclidea. Osservazione
Piano cartesiano e retta Il punto, la retta e il piano sono concetti primitivi di cui non si da una definizione rigorosa, essi sono i tre enti geometrici fondamentali della geometria euclidea. Osservazione
1 Punti, linee e piani nello spazio
 1 Punti, linee e piani nello spazio DEFINIZIONE. La geometria dello spazio o geometria dei solidi o ancora geometria solida è il settore della geometria che si occupa dei corpi a tre dimensioni (lunghezza,
1 Punti, linee e piani nello spazio DEFINIZIONE. La geometria dello spazio o geometria dei solidi o ancora geometria solida è il settore della geometria che si occupa dei corpi a tre dimensioni (lunghezza,
VETTORIALE E PRODOTTO MISTO. PIANI E RETTE DI
 Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Esercizi GEOMETRIA (Edile-Architettura e dell Edilizia) PRODOTTO VETTORIALE E PRODOTTO MISTO. PIANI E RETTE DI R 3. FASCI E STELLE. FORMULE
Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Esercizi GEOMETRIA (Edile-Architettura e dell Edilizia) PRODOTTO VETTORIALE E PRODOTTO MISTO. PIANI E RETTE DI R 3. FASCI E STELLE. FORMULE
Modellazione poligonale in Maya
 Informatica Grafica ][ Modellazione poligonale in Maya La tecnica di modellazione poligonale permette di costruire oggetti tridimensionali basati su poligoni. Malgrado gli oggetti poligonali siano spigolosi
Informatica Grafica ][ Modellazione poligonale in Maya La tecnica di modellazione poligonale permette di costruire oggetti tridimensionali basati su poligoni. Malgrado gli oggetti poligonali siano spigolosi
Corso di Matematica B - Ingegneria Informatica Testi di Esercizi. A1. Siano u, v, w vettori. Quali tra le seguenti operazioni hanno senso?
 A. Languasco - Esercizi Matematica B - 4. Geometria 1 A: Vettori geometrici Corso di Matematica B - Ingegneria Informatica Testi di Esercizi A1. Siano u, v, w vettori. Quali tra le seguenti operazioni
A. Languasco - Esercizi Matematica B - 4. Geometria 1 A: Vettori geometrici Corso di Matematica B - Ingegneria Informatica Testi di Esercizi A1. Siano u, v, w vettori. Quali tra le seguenti operazioni
Soluzioni agli Esercizi di Geometria e Algebra per Ingegneria Aerospaziale (nuovo ordinamento)
") Soluzioni agli Esercizi di Geometria e Algebra per Ingegneria Aerospaziale (nuovo ordinamento) Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile
Soluzioni agli Esercizi di Geometria e Algebra per Ingegneria Aerospaziale (nuovo ordinamento) Relazioni 1) Quali delle seguenti relazioni sono di equivalenza? x, y R {0} xry x/y Q x, y Z xry x + y è divisibile
Esercizi di geometria analitica negli spazi affini Giorgio Ottaviani
 Esercizi di geometria analitica negli spazi affini Giorgio Ottaviani Percorse a cavallo duemila chilometri di steppa russa, superó gli Urali, entró in Siberia, viaggió per quaranta giorni fino a raggiungere
Esercizi di geometria analitica negli spazi affini Giorgio Ottaviani Percorse a cavallo duemila chilometri di steppa russa, superó gli Urali, entró in Siberia, viaggió per quaranta giorni fino a raggiungere
GEOMETRIA ANALITICA. Il Piano cartesiano
 GEOMETRIA ANALITICA La geometria analitica consente di studiare e rappresentare per via algebrica informazioni di tipo geometrico. Lo studio favorisce una più immediata visualizzazione di informazioni,
GEOMETRIA ANALITICA La geometria analitica consente di studiare e rappresentare per via algebrica informazioni di tipo geometrico. Lo studio favorisce una più immediata visualizzazione di informazioni,
Superfici e solidi di rotazione. Cilindri indefiniti
 Superfici e solidi di rotazione Consideriamo un semipiano α, delimitato da una retta a, e sul semipiano una curva g; facendo ruotare il semipiano in un giro completo attorno alla retta a, la curva g descrive
Superfici e solidi di rotazione Consideriamo un semipiano α, delimitato da una retta a, e sul semipiano una curva g; facendo ruotare il semipiano in un giro completo attorno alla retta a, la curva g descrive
La retta nel piano cartesiano
 La retta nel piano cartesiano Se proviamo a disporre, sul piano cartesiano, una retta vediamo che le sue possibili posizioni sono sei: a) Coincidente con l asse delle y; b) Coincidente con l asse delle
La retta nel piano cartesiano Se proviamo a disporre, sul piano cartesiano, una retta vediamo che le sue possibili posizioni sono sei: a) Coincidente con l asse delle y; b) Coincidente con l asse delle
CONCETTI e ENTI PRIMITIVI
 CONCETTI e ENTI PRIMITIVI Sono Concetti e Enti primitivi ciò che non può essere definito in modo più elementare, il significato è noto a priori, cioè senza alcun'altra specificazione. es. es. movimento
CONCETTI e ENTI PRIMITIVI Sono Concetti e Enti primitivi ciò che non può essere definito in modo più elementare, il significato è noto a priori, cioè senza alcun'altra specificazione. es. es. movimento
Geometria analitica: rette e piani
 Geometria analitica: rette e piani parametriche Allineamento nel piano nello spazio Angoli tra rette e distanza 2 2006 Politecnico di Torino 1 Esempio 2 Sia A = (1, 2). Per l interpretazione geometrica
Geometria analitica: rette e piani parametriche Allineamento nel piano nello spazio Angoli tra rette e distanza 2 2006 Politecnico di Torino 1 Esempio 2 Sia A = (1, 2). Per l interpretazione geometrica
Geometria 2. Università degli Studi di Trento Corso di Laurea in Matematica A.A. 2011/ settembre 2012
 Geometria 2 Università degli Studi di Trento Corso di Laurea in Matematica A.A. 2011/2012 06 settembre 2012 Si svolgano i seguenti esercizi. Esercizio 1. Sia P 3 R il 3-spazio proiettivo reale dotato del
Geometria 2 Università degli Studi di Trento Corso di Laurea in Matematica A.A. 2011/2012 06 settembre 2012 Si svolgano i seguenti esercizi. Esercizio 1. Sia P 3 R il 3-spazio proiettivo reale dotato del
Definizione Chiamiamo poliedro la regione di spazio limitata che ha per bordo una superficie poliedrale.
 1 Poliedri Definizione Un sottoinsieme connesso dello spazio è detto superficie poliedrale se è l unione di un numero finito di poligoni P j (poligoni che si diranno facce del poliedro) in modo che risultino
1 Poliedri Definizione Un sottoinsieme connesso dello spazio è detto superficie poliedrale se è l unione di un numero finito di poligoni P j (poligoni che si diranno facce del poliedro) in modo che risultino
Precorso di Matematica
 UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTA DI ARCHITETTURA Precorso di Matematica Anna Scaramuzza Anno Accademico 2005-2006 17-24 Ottobre 2005 INDICE 1. GEOMETRIA EUCLIDEA........................ 2 1.1 Triangoli...............................
UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTA DI ARCHITETTURA Precorso di Matematica Anna Scaramuzza Anno Accademico 2005-2006 17-24 Ottobre 2005 INDICE 1. GEOMETRIA EUCLIDEA........................ 2 1.1 Triangoli...............................
Introduzione alla programmazione lineare
 Introduzione alla programmazione lineare struttura del problema di PL forme equivalenti rappresentazione e soluzione grafica rif. Fi 1.2; BT 1.1, 1.4 Problema di programmazione lineare Dati: un vettore
Introduzione alla programmazione lineare struttura del problema di PL forme equivalenti rappresentazione e soluzione grafica rif. Fi 1.2; BT 1.1, 1.4 Problema di programmazione lineare Dati: un vettore
APPUNTI DI GEOMETRIA SOLIDA
 APPUNTI DI GEOMETRIA SOLIDA Geometria piana: (planimetria) studio delle figure i cui punti stanno tutti su un piano Geometria solida: (stereometria) studio delle figure i cui punti non giacciono tutti
APPUNTI DI GEOMETRIA SOLIDA Geometria piana: (planimetria) studio delle figure i cui punti stanno tutti su un piano Geometria solida: (stereometria) studio delle figure i cui punti non giacciono tutti
La congettura di Poincaré
 La congettura di Poincaré Francesco Paoli Filosofia della scienza, 2017-18 Francesco Paoli (Filosofia della scienza, 2017-18) La congettura di Poincaré 1 / 33 Una domanda semplice... Che forma ha la Terra?
La congettura di Poincaré Francesco Paoli Filosofia della scienza, 2017-18 Francesco Paoli (Filosofia della scienza, 2017-18) La congettura di Poincaré 1 / 33 Una domanda semplice... Che forma ha la Terra?
Abilità Informatiche. Lezione II. Creazione di modelli 3D. arch. Gabriella Rendina
 Abilità Informatiche Lezione II Creazione di modelli 3D arch. Gabriella Rendina Modellazione 3D La modellazione 3D consente di creare progetti utilizzando modelli di solidi, superfici e mesh. Un modello
Abilità Informatiche Lezione II Creazione di modelli 3D arch. Gabriella Rendina Modellazione 3D La modellazione 3D consente di creare progetti utilizzando modelli di solidi, superfici e mesh. Un modello
METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA. Lezione n 12
 METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA Lezione n 12 PARTE SECONDA GEOMETRIA SOLIDA UNA PREMESSA Diversi esperti di Didattica della Matematica ritengono che l approccio migliore, per la
METODI E TECNOLOGIE PER L INSEGNAMENTO DELLA MATEMATICA Lezione n 12 PARTE SECONDA GEOMETRIA SOLIDA UNA PREMESSA Diversi esperti di Didattica della Matematica ritengono che l approccio migliore, per la
NUMERI NATURALI: - Ripetizione dei numeri naturali e delle quattro operazioni con relative proprieta
 PROGRAMMA DI MATEMATICA PER LA CLASSE 1^B/ 1C DEL LICEO SCIENTIFICO MALPIGHI SEZIONE ASSOCIATA DELL I.I.S. VIA SILVESTRI 301 ANNO SCOLASTICO 2018-2019 INSEGNANTE: NEGRI MARINA ALGEBRA NUMERI NATURALI:
PROGRAMMA DI MATEMATICA PER LA CLASSE 1^B/ 1C DEL LICEO SCIENTIFICO MALPIGHI SEZIONE ASSOCIATA DELL I.I.S. VIA SILVESTRI 301 ANNO SCOLASTICO 2018-2019 INSEGNANTE: NEGRI MARINA ALGEBRA NUMERI NATURALI:
Programmazione Lineare
 Programmazione Lineare Andrea Scozzari a.a. 2012-2013 March 14, 2013 Andrea Scozzari (a.a. 2012-2013) Programmazione Lineare March 14, 2013 1 / 18 Metodo del Simplesso Dato un problema di PL in forma standard
Programmazione Lineare Andrea Scozzari a.a. 2012-2013 March 14, 2013 Andrea Scozzari (a.a. 2012-2013) Programmazione Lineare March 14, 2013 1 / 18 Metodo del Simplesso Dato un problema di PL in forma standard
(i) Determinare l equazione cartesiana dell unica circonferenza C passante per i tre punti dati.
 Determinare l equazione cartesiana dell unica circonferenza C passante per i tre punti dati.") Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Edile/Architettura Esercizi per il corso di GEOMETRIA - a.a. 7/8 Docente: Prof. F. Flamini - Tutore: Dott. M. Paganin FOGLIO - Esercizi
Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Edile/Architettura Esercizi per il corso di GEOMETRIA - a.a. 7/8 Docente: Prof. F. Flamini - Tutore: Dott. M. Paganin FOGLIO - Esercizi
ax 1 + bx 2 + c = 0, r : 2x 1 3x 2 + 1 = 0.
 . Rette in R ; circonferenze. In questo paragrafo studiamo le rette e le circonferenze in R. Ci sono due modi per descrivere una retta in R : mediante una equazione cartesiana oppure mediante una equazione
. Rette in R ; circonferenze. In questo paragrafo studiamo le rette e le circonferenze in R. Ci sono due modi per descrivere una retta in R : mediante una equazione cartesiana oppure mediante una equazione
ESERCIZI. 1.2 Dire quali dei seguenti insiemi sono vuoti e descriverne il complementare nell insieme dei numeri reali: C:= {x R x 1 3 e x 1 2 };
 ESERCIZI. INSIEMISTICA. Sia l insieme dei punti dello spazio, Γ una sfera e N il suo polo nord. Quali delle seguenti relazioni sono corrette? N Γ; N ; Γ ; Γ ; N ; Γ N.. Dire quali dei seguenti insiemi
ESERCIZI. INSIEMISTICA. Sia l insieme dei punti dello spazio, Γ una sfera e N il suo polo nord. Quali delle seguenti relazioni sono corrette? N Γ; N ; Γ ; Γ ; N ; Γ N.. Dire quali dei seguenti insiemi
PIANO CARTESIANO e RETTE classi 2 A/D 2009/2010
 PIANO CARTESIANO e RETTE classi 2 A/D 2009/2010 1) PIANO CARTESIANO serve per indicare, identificare, chiamare... ogni PUNTO del piano (ente geometrico) con una coppia di valori numerici (detti COORDINATE).
PIANO CARTESIANO e RETTE classi 2 A/D 2009/2010 1) PIANO CARTESIANO serve per indicare, identificare, chiamare... ogni PUNTO del piano (ente geometrico) con una coppia di valori numerici (detti COORDINATE).
Geometria e Topologia I - 15 lug 2008 (14:30 - U1-02) 1/10. Cognome:... Nome:... Matricola:...
 1/10. Cognome:... Nome:... Matricola:...") Geometria e Topologia I - 5 lug 2008 (4:0 - U-02) /0 Cognome:................ Nome:................ Matricola:................ (Dare una dimostrazione esauriente di tutte le risposte.) () Si determinino
Geometria e Topologia I - 5 lug 2008 (4:0 - U-02) /0 Cognome:................ Nome:................ Matricola:................ (Dare una dimostrazione esauriente di tutte le risposte.) () Si determinino
LA PERPENDICOLARITA NELLO SPAZIO. Nello spazio si definiscono la perpendicolarità sia tra una retta e un piano sia tra due piani.
 1 LA PERPENDICOLARITA NELLO SPAZIO Nello spazio si definiscono la perpendicolarità sia tra una retta e un piano sia tra due piani. 2.1 La perpendicolarità retta piano Nel piano la perpendicolarità tra
1 LA PERPENDICOLARITA NELLO SPAZIO Nello spazio si definiscono la perpendicolarità sia tra una retta e un piano sia tra due piani. 2.1 La perpendicolarità retta piano Nel piano la perpendicolarità tra
Alessandra Raffaetà. La rappresentazione vettoriale
 Lezione 0 S.I.T. PER LA VALUTAZIONE E GESTIONE DEL TERRITORIO Corso di Laurea Magistrale in Scienze Ambientali Alessandra Raffaetà Dipartimento di Informatica Università Ca Foscari Venezia La rappresentazione
Lezione 0 S.I.T. PER LA VALUTAZIONE E GESTIONE DEL TERRITORIO Corso di Laurea Magistrale in Scienze Ambientali Alessandra Raffaetà Dipartimento di Informatica Università Ca Foscari Venezia La rappresentazione
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Rette
 Analisi Matematica 1 e Matematica 1 Geometria Analitica: Rette Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Nel Piano
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Rette Annalisa Amadori e Benedetta Pellacci amadori@uniparthenope.it pellacci@uniparthenope.it Università di Napoli Parthenope Contenuti Nel Piano
Geometria analitica pagina 1 di 5
 Geometria analitica pagina 1 di 5 GEOMETRIA LINEARE NEL PIANO È fissato nel piano un sistema di coordinate cartesiane ortogonali monometriche Oxy. 01. Scrivere due diverse rappresentazioni parametriche
Geometria analitica pagina 1 di 5 GEOMETRIA LINEARE NEL PIANO È fissato nel piano un sistema di coordinate cartesiane ortogonali monometriche Oxy. 01. Scrivere due diverse rappresentazioni parametriche
Strutture dati e loro organizzazione. Gabriella Trucco
 Strutture dati e loro organizzazione Gabriella Trucco Introduzione I linguaggi di programmazione di alto livello consentono di far riferimento a posizioni nella memoria principale tramite nomi descrittivi
Strutture dati e loro organizzazione Gabriella Trucco Introduzione I linguaggi di programmazione di alto livello consentono di far riferimento a posizioni nella memoria principale tramite nomi descrittivi
Geometria BAER Canale I Esercizi 12
 Geometria BAER Canale I Esercizi Esercizio. x = 0 x = Date le rette r : y = t e s : y = t, si verifichi che sono sghembe e si scrivano le equazioni z = t z = t parametriche di una retta r ortogonale ed
Geometria BAER Canale I Esercizi Esercizio. x = 0 x = Date le rette r : y = t e s : y = t, si verifichi che sono sghembe e si scrivano le equazioni z = t z = t parametriche di una retta r ortogonale ed
MODULI DI MATEMATICA (PRIMO BIENNIO)
") DIPARTIMENTO SCIENTIFICO Asse* Matematico Scientifico - tecnologico Biennio dell obbligo MODULI DI MATEMATICA (PRIMO BIENNIO) SUPERVISORE DI AREA Prof. FRANCESCO SCANDURRA MODULO N. 1 MATEMATICA Matematico
DIPARTIMENTO SCIENTIFICO Asse* Matematico Scientifico - tecnologico Biennio dell obbligo MODULI DI MATEMATICA (PRIMO BIENNIO) SUPERVISORE DI AREA Prof. FRANCESCO SCANDURRA MODULO N. 1 MATEMATICA Matematico
ax 1 + bx 2 + c = 0, r : 2x 1 3x = 0.
 . Rette in R ; circonferenze. In questo paragrafo studiamo le rette e le circonferenze in R. Ci sono due modi per descrivere una retta in R : mediante una equazione cartesiana oppure mediante una equazione
. Rette in R ; circonferenze. In questo paragrafo studiamo le rette e le circonferenze in R. Ci sono due modi per descrivere una retta in R : mediante una equazione cartesiana oppure mediante una equazione
Geometria e Topologia I (U1-4) 2006-mag-10 61
 2006-mag-10 61") Geometria e Topologia I (U1-4) 2006-mag-10 61 (15.9) Teorema. Consideriamo il piano affine. Se A A 2 (K) è un punto e r una retta che non passa per A, allora esiste unica la retta per A che non interseca
Geometria e Topologia I (U1-4) 2006-mag-10 61 (15.9) Teorema. Consideriamo il piano affine. Se A A 2 (K) è un punto e r una retta che non passa per A, allora esiste unica la retta per A che non interseca
Geometria analitica - Testo pagina 1 di 5 67
 Geometria analitica - Testo pagina di 5 67 5. GEOMETRI NLITI: Geometria lineare nel piano È fissato nel piano un sistema di coordinate cartesiane ortogonali monometriche Oxy. 50. 502. 503. 504. Scrivere
Geometria analitica - Testo pagina di 5 67 5. GEOMETRI NLITI: Geometria lineare nel piano È fissato nel piano un sistema di coordinate cartesiane ortogonali monometriche Oxy. 50. 502. 503. 504. Scrivere
3^A - MATEMATICA compito n d. l'equazione della mediana BM, verificando che il baricentro le appartenga;
 ^ - TETI compito n 2-2014-2015 1 Il triangolo ha come lati le rette r : y=x 2, s: x 4=0, t : x y 22=0 Disegna le rette r, s, t e determina: a le coordinate dei vertici =r s, =s t, =t r ; b l'area del triangolo;
^ - TETI compito n 2-2014-2015 1 Il triangolo ha come lati le rette r : y=x 2, s: x 4=0, t : x y 22=0 Disegna le rette r, s, t e determina: a le coordinate dei vertici =r s, =s t, =t r ; b l'area del triangolo;
Geometria 3 A.A Esercizi
 Geometria 3 A.A. 2012 2013 Esercizi Omotopia di applicazioni contiue. Si dimostri che lo spazio X = {x R 2 : x 1} è connesso. Siano x, y punti di uno spazio topologico X. Si dimostri che le applicazioni
Geometria 3 A.A. 2012 2013 Esercizi Omotopia di applicazioni contiue. Si dimostri che lo spazio X = {x R 2 : x 1} è connesso. Siano x, y punti di uno spazio topologico X. Si dimostri che le applicazioni
= (cioè le due terne di numeri direttori ( devono essere ) proporzionali). Tale uguaglianza non è verificata, poiché risulta ρ
 proporzionali). Tale uguaglianza non è verificata, poiché risulta ρ") Alcuni esercizi sullo spazio euclideo R Nel seguito R indicherà lo spazio euclideo tridimensionale standard, dotato del riferimento cartesiano naturale (pag 56-57 del libro Nota: gli esercizi proposti
Alcuni esercizi sullo spazio euclideo R Nel seguito R indicherà lo spazio euclideo tridimensionale standard, dotato del riferimento cartesiano naturale (pag 56-57 del libro Nota: gli esercizi proposti