Algoritmo di best-fit (o fitting) sinusoidale a 3 parametri ( ) ( )
|
|
|
- Giulia Zani
- 8 anni fa
- Просмотров:
Транскрипт
1 Algoritmo di best-it (o itting) sinusoidale a 3 parametri Supponiamo di disporre della versione digitalizzata di un segnale sinusoidale di ampiezza di pio A, requenza nota, ase assoluta ϕ e on omponente ontinua spuria (oset) C: = Asin ( 2 π t + ϕ) + C t = =, =, 1, 2,... N 1 (1) Ove: - ed sono rispettivamente il periodo e la requenza di ampionamento; - t = = è il -esimo istante di ampionamento; - N è la lunghezza del reord del segnale digitalizzato (numero di ampioni); N.B.: Si noti he in realtà la ostante C non a parte del modello di un segnale sinusoidale ideale; essa viene introdotta nella (1) al solo sopo di portare in onto l errore di oset introdotto dal digitalizzatore di segnale utilizzato per aquisire il vettore dei ampioni. La (1) può anhe essere risritta nella orma = Asin 2π + ϕ + C = Asin ( 2πF+ ϕ) + C = Asin ( Ω + ϕ) + C (2) Avendo posto: F = = requenza normalizzata del segnale Ω = 2 π F = pulsazione normalizzata del segnale Sruttando la ben nota relazione sin ( α β) sin ( α) os( β) os( α) sin ( β) (2) nella orma: + = + possiamo srivere la ( ) ( ϕ) ( ) ( ϕ) ( ) ( ) sin os os sin 1sin 2os (3) = A Ω + Ω + C = A Ω + A Ω + C avendo posto: A = Aos ( ϕ), A = Asin ( ϕ) 1 2 Se deiniamo i vettori, e la matrie D ome segue:
2 ( ) ( ) ( ) ( ) ( ) ( ) sin os 1 sin Ω os Ω 1 1 A1 =., D= sin 2Ω os 2Ω 1, = A 2. C sin 1 (( N 1) ) os( ( N 1) ) 1 N Ω Ω possiamo srivere la (3) in orma vettoriale: = D (4) ove il punto india il omune prodotto righe per olonne deinito nell algebra matriiale. La (4) i ornise un modo semplie per ostruire un segnale sinusoidale di parametri (pulsazione, ampiezza, ase ed oset) noti; a partire da essi sarà inatti suiiente ostruire la matrie D ed il vettore, quindi, eseguendo il prodotto preedente, alolare il vettore dei ampioni. Osserviamo he la matrie D è, almeno nella maggior parte dei asi, rettangolare alta, ossia ha dimensione N 3, on N (numero di righe = numero di ampioni) generalmente >> 3. Se disponiamo del vettore dei ampioni (ottenuto, ad esempio, da un osillosopio digitale o da un qualsiasi altro dispositivo digitalizzatore di segnale), possiamo pensare di ottenere i parametri A1, A2 e C (quindi anhe A e ϕ ) risolvendo il sistema (4) di N equazioni in 3 inognite. ale sistema è normalmente ortemente sovradeterminato, proprio in quanto il numero delle equazioni disponibili (N) è molto maggiore del numero delle inognite (3). Un modo di ottenere una soluzione di tale sistema è quello di riorrere ad un semplie artiiio; osserviamo he = D D = D D essendo D la trasposta di D. Se esiste l inversa della matrie ome: ( ) 1 DD D DD (matrie quadrata di dimensioni 3 3) è possibile riavare = (5) La matrie ( ) 1 DD D è detta pseudo-inversa di Moore-Penrose o matrie inversa generalizzat. MALAB è in grado di alolare la pseudo-inversa di Moore-Penrose grazie alla unzione pinv; si rinvia alla doumentazione di tale unzione per maggiori dettagli sulle proprietà di questa matrie. Se D non ha rango massimo (ossia 3), la (5) non è l unia soluzione del sistema (4); le (ininite) soluzioni del sistema sono quelle he rendono minima la q.tà A -b ; in questo aso MALAB è in grado di trovare un altra soluzione al preedente sistema di equazioni ortemente
3 sovradeterminato utilizzando l operatore \ al quale già si riorre per la soluzioni dei normali sistemi di equazioni lineari. Quando si usa l istruzione 1 = D\ on D avente le aratteristihe di ui sopra, MALAB riera la migliore soluzione nel senso dei minimi quadrati, trovando proprio un minimo (loale) della quantità A -b. 1 Sia sia 1 soddisano il sistema di equazioni (5) nel senso dei minimi quadrati, ossia entrambi garantisono un errore quadratio medio residuo dell ordine dell errore di arrotondamento del sistema di alolo ma, generalmente, sono tra loro diverse; in partiolare, oltre a minimizzare lo sarto quadratio medio tra le misure e la sinusoide interpolante, ha anhe il minimo numero di elementi non nulli. Ottenuto è possibile riavare la migliore sinusoide interpolante i dati nel senso dei minimi quadrati alolando le quantità: A= A + A ϕ A 2 = artan A1 e valutando il vettore ~ = Asin ( 2 π t + ϕ) + C t = =, =, 1, 2,... N 1 Alternativamente si può ottenere ~ ome ~ = D Esempio di appliazione del itting sinusoidale a 3 parametri ad un segnale sinusoidale ideale di parametri nominali A = 1, ϕ = π, C =.25, sporato da rumore gaussiano biano additivo di 3 deviazione standard σ N =.1:
4 Nel titolo della igura sono riportati i parametri della sinusoide interpolante individuati dalla proedura di itting sinusoidale a 3 parametri; ome si può notare essi dierisono leggermente da quelli nominali. Un indiatore della bontà della stima dei parametri restituiti dal metodo è l errore quadratio medio (erms nel titolo della igura preedente), deinito ome: 1 e A Ft N 1 2 RMS = ( *sin ( 2π + ϕ) ) (6) N = Estensione al aso multiarmonio Il metodo di stima preedente può essere esteso ailmente alla riera del itting di un segnale multiseno, ossia ostituito dalla sovrapposizione di 2 o più armonihe di requenza diversa; detti i,, Ai, ϕi (i =, 1,, M-1) i parametri di tali armonihe, il modello del segnale è: M 1 = A sin ( 2 π,t + ϕ ) + C t = =, =, 1, 2,... N 1 (7) i i i i= Che possiamo anhe risrivere ome: M 1 M 1 sin (, ) os( ϕ ) os(, ) sin ( ϕ ) 1, sin (, ) 2, os(, ) (8) = A Ω + Ω + C = A Ω + A Ω + C i i i i i i i i i i= i= avendo posto: A = A os ( ϕ ), A = A sin ( ϕ ) 1, i i i 2, i i i
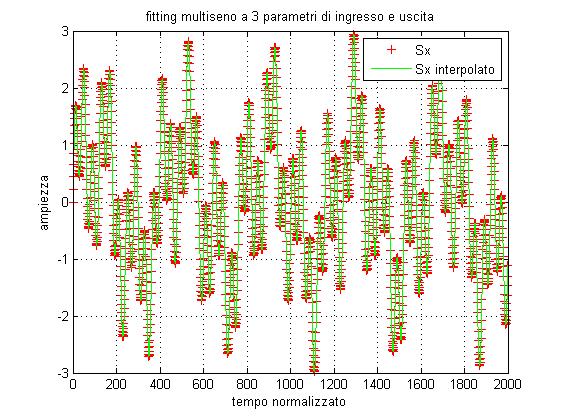
5 Anhe questa volta possiamo srivere: = D Ma D è ora una matrie N (2*M + 1) e è un vettore olonna on 2*M + 1 righe: sin ( Ω, ) os( Ω, ) sin ( Ω1) os ( Ω1) sin ( Ω, M 1 ) os( Ω, M 1 ) 1 D = sin (( N 1) Ω, ) os( ( N 1) Ω, ) sin (( N 1) Ω1, ) os( ( N 1 ) Ω1, ) sin (( N 1) ΩM 1) os( ( N 1) Ω, M 1 ) 1 A1, A 2, A 1,1 A2,1 = A 1, M 1 A2, M 1 C Anhe in questo aso il miglior vettore dei oeiienti può essere alolato riorrendo alla pseudoinversa di Moore-Penrose. Esempio di appliazione della stima multiseno a 3 parametri per un segnale dato dalla somma di tre armonihe di uguale ampiezza e ase:
6
CAMPIONAMENTO E RICOSTRUZIONE DI SEGNALI. 1 Fondamenti Segnali e Trasmissione
 CAMPIONAMENTO E RICOSTRUZIONE DI SEGNALI Fondamenti Segnali e Trasmissione Numerizzazione dei segnali Nei moderni sistemi di memorizzazione e trasmissione i segnali in ingresso sono di tipo numerio, normalmente
CAMPIONAMENTO E RICOSTRUZIONE DI SEGNALI Fondamenti Segnali e Trasmissione Numerizzazione dei segnali Nei moderni sistemi di memorizzazione e trasmissione i segnali in ingresso sono di tipo numerio, normalmente
TEOREMA DEL CAMPIONAMENTO
 1 TEOREMA DEL CAMPIONAMENTO nota per il orso di Teleomuniazioni a ura di F. Benedetto G. Giunta 1. Introduzione Il proesso di ampionamento è di enorme importanza ai fini della realizzazione dei dispositivi
1 TEOREMA DEL CAMPIONAMENTO nota per il orso di Teleomuniazioni a ura di F. Benedetto G. Giunta 1. Introduzione Il proesso di ampionamento è di enorme importanza ai fini della realizzazione dei dispositivi
16 L INTEGRALE INDEFINITO
 9. Integrali immediati 6 L INTEGRALE INDEFINITO Riassumiamo le puntate preedenti: si die INTEGRALE INDEFINITO di una funzione f ( ), la famiglia di tutte e sole quelle funzioni la ui derivata è uguale
9. Integrali immediati 6 L INTEGRALE INDEFINITO Riassumiamo le puntate preedenti: si die INTEGRALE INDEFINITO di una funzione f ( ), la famiglia di tutte e sole quelle funzioni la ui derivata è uguale
Spin. La hamiltoniana classica di una particella di massa m e carica q in presenza di un potenziale elettromagnetico (Φ, A) si scrive.
 si scrive.") Spin La hamiltoniana lassia di una partiella di massa m e aria q in presenza di un potenziale elettromagnetio Φ, A si srive Sviluppando il quadrato si ha H = H = p q A 2 + qφ p 2 + A 2 2q A p + qφ 2 Se
Spin La hamiltoniana lassia di una partiella di massa m e aria q in presenza di un potenziale elettromagnetio Φ, A si srive Sviluppando il quadrato si ha H = H = p q A 2 + qφ p 2 + A 2 2q A p + qφ 2 Se
Lezioni di acustica. Analisi del segnale sonoro
 Lezioni di acustica Analisi del segnale sonoro ONDA SINUSOIDALE sin 2 sin 2 sin A è l'ampiezza ω è la pulsazione (o velocità angolare, indica quanti periodi ci sono in un intervallo di 2π) è la requenza,
Lezioni di acustica Analisi del segnale sonoro ONDA SINUSOIDALE sin 2 sin 2 sin A è l'ampiezza ω è la pulsazione (o velocità angolare, indica quanti periodi ci sono in un intervallo di 2π) è la requenza,
Sistemi sovradeterminati
 Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione lineare di
Sistemi sovradeterminati Sia A una matrice m n ove m > n sia b R m trovare una soluzione del sistema sovradeterminato Ax = b significa cercare di esprimere un vettore di R m come combinazione lineare di
Metodo dei minimi quadrati e matrice pseudoinversa
 Scuola universitaria professionale della Svizzera italiana Dipartimento Tecnologie Innovative Metodo dei minimi quadrati e matrice pseudoinversa Algebra Lineare Semestre Estivo 2006 Metodo dei minimi quadrati
Scuola universitaria professionale della Svizzera italiana Dipartimento Tecnologie Innovative Metodo dei minimi quadrati e matrice pseudoinversa Algebra Lineare Semestre Estivo 2006 Metodo dei minimi quadrati
I Segnali nella comunicazione
 I Segnali nella comunicazione Nella lingua italiana il termine segnale indica una convenzione, la cui unzione è quella di comunicare qualcosa ( segnale di Partenza, segnale di aiuto, segnale stradale ecc.).
I Segnali nella comunicazione Nella lingua italiana il termine segnale indica una convenzione, la cui unzione è quella di comunicare qualcosa ( segnale di Partenza, segnale di aiuto, segnale stradale ecc.).
Esercizi sulle reti elettriche in corrente continua
 serizi sulle reti elettrihe in orrente ontinua serizio 1: eterminare la P erogata generatore, e la P R assorita resistore R del iruito in figura 4 Ω Ω Ω 15 Ω 5 Ω Ω R Ω 10 Ω Soluzione: P = 150 W P R =.08
serizi sulle reti elettrihe in orrente ontinua serizio 1: eterminare la P erogata generatore, e la P R assorita resistore R del iruito in figura 4 Ω Ω Ω 15 Ω 5 Ω Ω R Ω 10 Ω Soluzione: P = 150 W P R =.08
Confronto fra i sistemi di modulazione AM, DSB e SSB
 ngelo rotopapa - IK0VVG Conronto ra i sistemi di modulazione M, B e B 1. Introduzione Chi si oupa di autoostruzione avrà siuramente notato he aluni progetti sono relativi a operanti in banda laterale unia
ngelo rotopapa - IK0VVG Conronto ra i sistemi di modulazione M, B e B 1. Introduzione Chi si oupa di autoostruzione avrà siuramente notato he aluni progetti sono relativi a operanti in banda laterale unia
GEOMETRIA ANALITICA 8 LE CONICHE
 GEOMETRIA ANALITICA 8 LE CONICHE Tra tutte le urve, ne esistono quattro partiolari he vengono hiamate onihe perhé sono ottenute tramite l intersezione di una superfiie i-onia on un piano. A seonda della
GEOMETRIA ANALITICA 8 LE CONICHE Tra tutte le urve, ne esistono quattro partiolari he vengono hiamate onihe perhé sono ottenute tramite l intersezione di una superfiie i-onia on un piano. A seonda della
TRASFORMATA DI HILBERT
 TRASFORMATA DI ILBERT La Trasformata di ilbert è una partiolare rappresentazione he, ontrariamente ad altre trasformate (Fourier, Laplae, Z, ) non realizza un ambiamento del dominio di definizione. In
TRASFORMATA DI ILBERT La Trasformata di ilbert è una partiolare rappresentazione he, ontrariamente ad altre trasformate (Fourier, Laplae, Z, ) non realizza un ambiamento del dominio di definizione. In
Spazi vettoriali euclidei.
 Spazi vettoriali euclidei Prodotto scalare, lunghezza e ortogonalità in R n Consideriamo lo spazio vettoriale R n = { =,,, n R}, n con la somma fra vettori e il prodotto di un vettore per uno scalare definiti
Spazi vettoriali euclidei Prodotto scalare, lunghezza e ortogonalità in R n Consideriamo lo spazio vettoriale R n = { =,,, n R}, n con la somma fra vettori e il prodotto di un vettore per uno scalare definiti
1) Entropia di variabili aleatorie continue. 2) Esempi di variabili aleatorie continue. 3) Canali di comunicazione continui. 4) Canale Gaussiano
 Entropia di variabili aleatorie continue. 2) Esempi di variabili aleatorie continue. 3) Canali di comunicazione continui. 4) Canale Gaussiano") Argomenti della Lezione 1) Entropia di variabili aleatorie continue ) Esempi di variabili aleatorie continue 3) Canali di comunicazione continui 4) Canale Gaussiano 5) Limite di Shannon 1 Entropia di una
Argomenti della Lezione 1) Entropia di variabili aleatorie continue ) Esempi di variabili aleatorie continue 3) Canali di comunicazione continui 4) Canale Gaussiano 5) Limite di Shannon 1 Entropia di una
Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari
 Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017 Elementi di Algebra Lineare
Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017 Elementi di Algebra Lineare
Analisi di segnali campionati
 Analisi nel dominio della frequenza Analisi di segnali ampionati - 1 Analisi di segnali ampionati 1 Analisi dei segnali nel dominio della frequenza I prinipali metodi di analisi dei segnali di misura possono
Analisi nel dominio della frequenza Analisi di segnali ampionati - 1 Analisi di segnali ampionati 1 Analisi dei segnali nel dominio della frequenza I prinipali metodi di analisi dei segnali di misura possono
1 Distanza di un punto da una retta (nel piano)
") Esercizi 26/10/2007 1 Distanza di un punto da una retta (nel piano) Sia r = {ax + by + c = 0} una retta. Sia P = (p 1, p 2 ) R 2 un punto che non sta sulla retta r. Vogliamo vedere se si può parlare di
Esercizi 26/10/2007 1 Distanza di un punto da una retta (nel piano) Sia r = {ax + by + c = 0} una retta. Sia P = (p 1, p 2 ) R 2 un punto che non sta sulla retta r. Vogliamo vedere se si può parlare di
Proprietà globali delle funzioni continue
 Proprietà globali delle funzioni ontinue Tramite i limiti, abbiamo studiato il omportamento di una funzione nell intorno di un punto (proprietà loali). Ora i oupiamo di funzioni ontinue su tutto un intervallo,
Proprietà globali delle funzioni ontinue Tramite i limiti, abbiamo studiato il omportamento di una funzione nell intorno di un punto (proprietà loali). Ora i oupiamo di funzioni ontinue su tutto un intervallo,
FFT (FAST FOURIER TRANSFORM ALGORITHM) ALGORITMI VELOCI per la TRASFORMATA DISCRETA DI FOURIER. Slide 1
 ALGORITMI VELOCI per la TRASFORMATA DISCRETA DI FOURIER. Slide 1") FFT (FAST FOURIER TRANSFORM ALGORITHM ALGORITMI VELOCI per la TRASFORMATA DISCRETA DI FOURIER Slide Introduzione / Gli algoritmi noti ome Fast Fourier Transorm hanno rivoluzionato l'analisi di segnali
FFT (FAST FOURIER TRANSFORM ALGORITHM ALGORITMI VELOCI per la TRASFORMATA DISCRETA DI FOURIER Slide Introduzione / Gli algoritmi noti ome Fast Fourier Transorm hanno rivoluzionato l'analisi di segnali
RISPOSTA IN FREQUENZA DEI SISTEMI LINEARI TEMPO INVARIANTI
 RISPOSTA IN FREQUENZA DEI SISTEMI LINEARI TEMPO INVARIANTI 1 Fondamenti di segnali Fondamenti e trasmissione TLC Introduzione Se il segnale d ingresso di un sistema Lineare Tempo-Invariante (LTI e un esponenziale
RISPOSTA IN FREQUENZA DEI SISTEMI LINEARI TEMPO INVARIANTI 1 Fondamenti di segnali Fondamenti e trasmissione TLC Introduzione Se il segnale d ingresso di un sistema Lineare Tempo-Invariante (LTI e un esponenziale
IL TORNANTE RETTIFILO CONTROCURVA RETTIFILO
 IL TORNANTE il tornante è quella partiolare urva, esterna ai rettifili, he onsente un inversione della direzione dell asse, onsentendo di prendere quota all interno di una fasia di terreno relativamente
IL TORNANTE il tornante è quella partiolare urva, esterna ai rettifili, he onsente un inversione della direzione dell asse, onsentendo di prendere quota all interno di una fasia di terreno relativamente
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Potenza in regime sinusoidale
 26 Con riferimento alla convenzione dell utilizzatore, la potenza istantanea p(t) assorbita da un bipolo è sempre definita come prodotto tra tensione v(t) e corrente i(t): p(t) = v(t) i(t) Considerando
26 Con riferimento alla convenzione dell utilizzatore, la potenza istantanea p(t) assorbita da un bipolo è sempre definita come prodotto tra tensione v(t) e corrente i(t): p(t) = v(t) i(t) Considerando
I. Foglio di esercizi su vettori linearmente dipendenti e linearmente indipendenti. , v 2 = α v 1 + β v 2 + γ v 3. α v 1 + β v 2 + γ v 3 = 0. + γ.
 ESERCIZI SVOLTI DI ALGEBRA LINEARE (Sono svolti alcune degli esercizi proposti nei fogli di esercizi su vettori linearmente dipendenti e vettori linearmente indipendenti e su sistemi lineari ) I. Foglio
ESERCIZI SVOLTI DI ALGEBRA LINEARE (Sono svolti alcune degli esercizi proposti nei fogli di esercizi su vettori linearmente dipendenti e vettori linearmente indipendenti e su sistemi lineari ) I. Foglio
Lezione 15. Stabilità di sistemi retroazionati. F. Previdi - Automatica - Lez. 15 1
 ezione 15. Stabilità di sistemi retroazionati F. Previdi Automatia ez. 15 1 Shema 1. Stabilità di sistemi retroazionati 2. Stabilità & inertezza 3. Margine di guadagno 4. Margine di fase 5. Criterio di
ezione 15. Stabilità di sistemi retroazionati F. Previdi Automatia ez. 15 1 Shema 1. Stabilità di sistemi retroazionati 2. Stabilità & inertezza 3. Margine di guadagno 4. Margine di fase 5. Criterio di
ossia può anche essere localizzato univocamente sul piano complesso con la sua forma polare.
 ALGEBRA COMPLESSA Nel corso dei secoli gli insiemi dei numeri sono andati man mano allargandosi per rispondere all esigenza di dare soluzione a equazioni e problemi sempre nuovi I numeri complessi sono
ALGEBRA COMPLESSA Nel corso dei secoli gli insiemi dei numeri sono andati man mano allargandosi per rispondere all esigenza di dare soluzione a equazioni e problemi sempre nuovi I numeri complessi sono
Argomenti Capitolo 1 Richiami
 Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
Argomenti Capitolo 1 Richiami L insieme dei numeri reali R si rappresenta geometricamente con l insieme dei punti di una retta orientata su cui sia stato fissato un punto 0 e un segmento unitario. L insieme
Corso di Laurea in Fisica. Geometria. a.a Canale 3 Prof. P. Piazza Magiche notazioni
 Corso di Laurea in Fisica. Geometria. a.a. 23-4. Canale 3 Prof. P. Piazza Magiche notazioni Siano V e W due spazi vettoriali e sia T : V W un applicazione lineare. Fissiamo una base B per V ed una base
Corso di Laurea in Fisica. Geometria. a.a. 23-4. Canale 3 Prof. P. Piazza Magiche notazioni Siano V e W due spazi vettoriali e sia T : V W un applicazione lineare. Fissiamo una base B per V ed una base
Unità Didattica 1. Sistemi di Numerazione
 Unità Didattia Sistemi di Numerazione Sistemi di Numerazione Posizionali Criterio per la rappresentazione di un insieme infinito di numeri mediante un insieme limitato di simoli. Un sistema di numerazione
Unità Didattia Sistemi di Numerazione Sistemi di Numerazione Posizionali Criterio per la rappresentazione di un insieme infinito di numeri mediante un insieme limitato di simoli. Un sistema di numerazione
1. Calcolo del Momento di plasticizzazione per una sezione tubolare in acciaio.
 1. Calolo del Momento di plastiizzazione per una sezione tubolare in aiaio. La sezione presa in onsiderazione è la seguente: Shema di riferimento per il alolo del momento di plastiizzazione della sezione
1. Calolo del Momento di plastiizzazione per una sezione tubolare in aiaio. La sezione presa in onsiderazione è la seguente: Shema di riferimento per il alolo del momento di plastiizzazione della sezione
Corso di Fondamenti di Telecomunicazioni
 Corso di Fondaeni di Teleouniazioni 6 - SEGNALI IN BANDA PASSANTE E MODULAZIONI Pro. Mario Barbera [are 3] 1 Fondaeni di TLC - Pro. M. Barbera Modulazione d angolo Modulazione d angolo (o angolare) Inviluo
Corso di Fondaeni di Teleouniazioni 6 - SEGNALI IN BANDA PASSANTE E MODULAZIONI Pro. Mario Barbera [are 3] 1 Fondaeni di TLC - Pro. M. Barbera Modulazione d angolo Modulazione d angolo (o angolare) Inviluo
TEORIA SUI LIMITI DEFINIZIONE DI LIMITE FINITO DI UNA FUNZIONE PER X CHE TENDE AD UN VALORE FINITO
 TEORIA SUI LIMITI DEFINIZIONE DI LIMITE FINITO DI UNA FUNZIONE PER X CHE TENDE AD UN VALORE FINITO Si die he, per he tende a, la funzione y=f() ha per ite l e si srive: l = l I( ) ESEMPIO DI VERIFICA DI
TEORIA SUI LIMITI DEFINIZIONE DI LIMITE FINITO DI UNA FUNZIONE PER X CHE TENDE AD UN VALORE FINITO Si die he, per he tende a, la funzione y=f() ha per ite l e si srive: l = l I( ) ESEMPIO DI VERIFICA DI
x 1 Fig.1 Il punto P = P =
 Geometria di R 2 In questo paragrafo discutiamo le proprietà geometriche elementari del piano Per avere a disposizione delle coordinate nel piano, fissiamo un punto, che chiamiamo l origine Scegliamo poi
Geometria di R 2 In questo paragrafo discutiamo le proprietà geometriche elementari del piano Per avere a disposizione delle coordinate nel piano, fissiamo un punto, che chiamiamo l origine Scegliamo poi
La corrente alternata
 La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
La corrente alternata Corrente continua e corrente alternata Le correnti continue sono dovute ad un generatore i cui poli hanno sempre lo stesso segno e pertanto esse percorrono un circuito sempre nello
9. Sistemi di Modulazione Numerica in banda traslata. Modulo TLC:TRASMISSIONI Modulazione numerica in banda traslata
 1 9. Sistemi di Modulazione Numerica in banda traslata Modulazione QAM (analogica) 2 Modulazione QAM (Quadrature Amplitude Modulation; modulazione di ampiezza con portanti in quadratura) è un tipo di modulazione
1 9. Sistemi di Modulazione Numerica in banda traslata Modulazione QAM (analogica) 2 Modulazione QAM (Quadrature Amplitude Modulation; modulazione di ampiezza con portanti in quadratura) è un tipo di modulazione
CHIMICA FISICA I. Le leggi dei gas
 A.A. 2014-2015 Corso di Laurea in CHIMICA INDUSTRIALE CHIMICA FISICA I Le leggi dei gas Lezioni di Chimia Fisia I A.A. 2014-2015 Leggi dei gas - Pagina 1 Un sistema ostituito da un gas puro si omporta
A.A. 2014-2015 Corso di Laurea in CHIMICA INDUSTRIALE CHIMICA FISICA I Le leggi dei gas Lezioni di Chimia Fisia I A.A. 2014-2015 Leggi dei gas - Pagina 1 Un sistema ostituito da un gas puro si omporta
CALENDARIO BOREALE 2 AMERICHE 2015 QUESITO 1
 www.matefilia.it Indirizzi: LI0, EA0 SCIENTIFICO; LI0 - SCIENTIFICO - OPZIONE SCIENZE APPLICATE CALENDARIO BOREALE AMERICHE 0 QUESITO Determinare il volume del solido generato dalla rotazione attorno alla
www.matefilia.it Indirizzi: LI0, EA0 SCIENTIFICO; LI0 - SCIENTIFICO - OPZIONE SCIENZE APPLICATE CALENDARIO BOREALE AMERICHE 0 QUESITO Determinare il volume del solido generato dalla rotazione attorno alla
Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari
 Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari 4 maggio Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ) Esercizio Siano 3 6 8 6 4 3 3 ) determinare
Esercizi su algebra lineare, fattorizzazione LU e risoluzione di sistemi lineari 4 maggio Nota: gli esercizi più impegnativi sono contrassegnati dal simbolo ( ) Esercizio Siano 3 6 8 6 4 3 3 ) determinare
Corso di Matematica Generale M-Z Dipartimento di Economia Universitá degli Studi di Foggia ALGEBRA LINEARE. Giovanni Villani
 Corso di Matematica Generale M-Z Dipartimento di Economia Universitá degli Studi di Foggia ALGEBRA LINEARE Giovanni Villani Matrici Definizione 1 Si definisce matrice di tipo m n una funzione che associa
Corso di Matematica Generale M-Z Dipartimento di Economia Universitá degli Studi di Foggia ALGEBRA LINEARE Giovanni Villani Matrici Definizione 1 Si definisce matrice di tipo m n una funzione che associa
ESEMPI DI PIASTRE SOTTILI PIANE E CURVE. Corso di Meccanica delle Strutture- ing. Elena Benvenuti
 PIASTRE ESEMPI DI PIASTRE SOTTILI PIANE E CURVE Corso di Meania delle Strutture- ing. Elena Benvenuti Elementi di piastra Disuteremo solo EF piastra (plate) volti a modellare solo il omportamento flessionale
PIASTRE ESEMPI DI PIASTRE SOTTILI PIANE E CURVE Corso di Meania delle Strutture- ing. Elena Benvenuti Elementi di piastra Disuteremo solo EF piastra (plate) volti a modellare solo il omportamento flessionale
Le matrici. Sia K un campo con elemento neutro dell addizione 0 ed elemento neutro della moltiplicazione 1.
 Le matrici Sia K un campo con elemento neutro dell addizione 0 ed elemento neutro della moltiplicazione 1. Siano m, n N\{0}. Una matrice m n a coefficienti in K è una tabella di m n elementi di K disposti
Le matrici Sia K un campo con elemento neutro dell addizione 0 ed elemento neutro della moltiplicazione 1. Siano m, n N\{0}. Una matrice m n a coefficienti in K è una tabella di m n elementi di K disposti
Moto vario elastico: fenomeno del colpo d ariete
 Moto vario elastio: fenomeno del olpo d ariete 1. Desrizione del fenomeno Si onsideri un semplie impianto ostituito da un serbatoio di grande ampiezza in modo tale he in esso il livello di ario rimanga
Moto vario elastio: fenomeno del olpo d ariete 1. Desrizione del fenomeno Si onsideri un semplie impianto ostituito da un serbatoio di grande ampiezza in modo tale he in esso il livello di ario rimanga
misura. Adesso, ad un arbitrario punto P dello spazio associamo una terna di numeri reali x
 4. Geometria di R 3. Questo paragrafo è molto simile al paragrafo : tratta infatti delle proprietà geometriche elementari dello spazio R 3. Per assegnare delle coordinate nello spazio, fissiamo innanzitutto
4. Geometria di R 3. Questo paragrafo è molto simile al paragrafo : tratta infatti delle proprietà geometriche elementari dello spazio R 3. Per assegnare delle coordinate nello spazio, fissiamo innanzitutto
1 Applicazioni lineari
 1 Applicazioni lineari 1 Applicazioni lineari 1.1 Definizione Si considerino lo spazio tridimensionale euclideo E e lo spazio vettoriale V ad esso associato. Definizione. 1.1. Sia A una applicazione di
1 Applicazioni lineari 1 Applicazioni lineari 1.1 Definizione Si considerino lo spazio tridimensionale euclideo E e lo spazio vettoriale V ad esso associato. Definizione. 1.1. Sia A una applicazione di
MODELLI DI CANALI TRASMISSIVI
 MODELLI DI CANALI RASMISSIVI CANALI RASMISSIVI Canali rasmissivi Canale trasmissivo In un Sistema di Comunicazione, per Canale rasmissivo si intende, normalmente, l insieme di: - mezzo isico (mezzo trasmissivo)
MODELLI DI CANALI RASMISSIVI CANALI RASMISSIVI Canali rasmissivi Canale trasmissivo In un Sistema di Comunicazione, per Canale rasmissivo si intende, normalmente, l insieme di: - mezzo isico (mezzo trasmissivo)
Lezione 7: Il Teorema di Rouché-Capelli
 Lezione 7: Il Teorema di Rouché-Capelli In questa lezione vogliamo rivisitare i sistemi lineari e dare alcuni risultati che ci permettono di determinare dato un sistema lineare se ammette soluzioni e da
Lezione 7: Il Teorema di Rouché-Capelli In questa lezione vogliamo rivisitare i sistemi lineari e dare alcuni risultati che ci permettono di determinare dato un sistema lineare se ammette soluzioni e da
Valutazione della capacità dissipativa di un sistema strutturale
 Tecniche innovative per l identificazione delle caratteristiche dinamiche delle strutture e del danno Valutazione della capacità dissipativa di un sistema strutturale Prof. Ing. Felice Carlo PONZO - Ing.
Tecniche innovative per l identificazione delle caratteristiche dinamiche delle strutture e del danno Valutazione della capacità dissipativa di un sistema strutturale Prof. Ing. Felice Carlo PONZO - Ing.
1 Equazioni parametriche e cartesiane di sottospazi affini di R n
 2 Trapani Dispensa di Geometria, Equazioni parametriche e cartesiane di sottospazi affini di R n Un sottospazio affine Σ di R n e il traslato di un sottospazio vettoriale. Cioe esiste un sottospazio vettoriale
2 Trapani Dispensa di Geometria, Equazioni parametriche e cartesiane di sottospazi affini di R n Un sottospazio affine Σ di R n e il traslato di un sottospazio vettoriale. Cioe esiste un sottospazio vettoriale
SPAZI EUCLIDEI, APPLICAZIONI SIMMETRICHE, FORME QUADRATICHE
 SPAZI EUCLIDEI, APPLICAZIONI SIMMETRICHE, FORME QUADRATICHE. Esercizi Esercizio. In R calcolare il modulo dei vettori,, ),,, ) ed il loro angolo. Esercizio. Calcolare una base ortonormale del sottospazio
SPAZI EUCLIDEI, APPLICAZIONI SIMMETRICHE, FORME QUADRATICHE. Esercizi Esercizio. In R calcolare il modulo dei vettori,, ),,, ) ed il loro angolo. Esercizio. Calcolare una base ortonormale del sottospazio
LEGGE DI OHM. Inizieremo a trattare il caso in cui il circuito elettrico risulta schematizzabile con soli parametri in serie :
 EGGE D OHM nizieremo a trattare il caso in cui il circuito elettrico risulta schematizzabile con soli parametri in serie : Supponiamo nota la corrente e quindi incognita la tensione da applicare al circuito.
EGGE D OHM nizieremo a trattare il caso in cui il circuito elettrico risulta schematizzabile con soli parametri in serie : Supponiamo nota la corrente e quindi incognita la tensione da applicare al circuito.
LA TRASFORMATA DI FOURIER, PROPRIETA ED ESEMPI (2) 12 Fondamenti Segnali e Trasmissione
 12 Fondamenti Segnali e Trasmissione") LA RASFORMAA DI FOURIER, PROPRIEA ED ESEMPI () Fondamenti Segnali e rasmissione Proprieta della DF (5) Moltiplicazione nelle requenze: la DF inversa del prodotto delle DF di due segnali e uguale all integrale
LA RASFORMAA DI FOURIER, PROPRIEA ED ESEMPI () Fondamenti Segnali e rasmissione Proprieta della DF (5) Moltiplicazione nelle requenze: la DF inversa del prodotto delle DF di due segnali e uguale all integrale
S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie. Cap. 2. Cinematica del punto
 SBarbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie Cap 2 Cinematica del punto 21 - Posizione, velocitá e accelerazione di una particella La posizione di una particella puó essere definita, ad
SBarbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie Cap 2 Cinematica del punto 21 - Posizione, velocitá e accelerazione di una particella La posizione di una particella puó essere definita, ad
Applicazioni delle leggi della meccanica: moto armnico
 Applicazioni delle leggi della meccanica: moto armnico Discutiamo le caratteristiche del moto armonico utilizzando l esempio di una molla di costante k e massa trascurabile a cui è fissato un oggetto di
Applicazioni delle leggi della meccanica: moto armnico Discutiamo le caratteristiche del moto armonico utilizzando l esempio di una molla di costante k e massa trascurabile a cui è fissato un oggetto di
SISTEMI LINEARI. x y + 2t = 0 2x + y + z t = 0 x z t = 0 ; S 3 : ; S 5x 2y z = 1 4x 7y = 3
 SISTEMI LINEARI. Esercizi Esercizio. Verificare se (,, ) è soluzione del sistema x y + z = x + y z = 3. Trovare poi tutte le soluzioni del sistema. Esercizio. Scrivere un sistema lineare di 3 equazioni
SISTEMI LINEARI. Esercizi Esercizio. Verificare se (,, ) è soluzione del sistema x y + z = x + y z = 3. Trovare poi tutte le soluzioni del sistema. Esercizio. Scrivere un sistema lineare di 3 equazioni
Elementi di Algebra Lineare. Spazio Vettoriale (lineare)
") Elementi di Algebra Lineare Spazio Vettoriale (lineare) Uno spazio vettoriale su un corpo F è una quadrupla (X, F, +, ) costituita da: un insieme di elementi X, detti vettori, un corpo F, i cui elementi
Elementi di Algebra Lineare Spazio Vettoriale (lineare) Uno spazio vettoriale su un corpo F è una quadrupla (X, F, +, ) costituita da: un insieme di elementi X, detti vettori, un corpo F, i cui elementi
Fig. 1 Schema statico della trave Fig. 2 Sezione trasversale della trave (IPE 400)
") Eseritazione n.3 La trave ontinua rappresentata nella seguente Fig.1 onsta di due ampate uguali di lue L 8 m. La Fig. mostra le aratteristihe dimensionali della sezione trasversale in ui la soletta è realizzata
Eseritazione n.3 La trave ontinua rappresentata nella seguente Fig.1 onsta di due ampate uguali di lue L 8 m. La Fig. mostra le aratteristihe dimensionali della sezione trasversale in ui la soletta è realizzata
Corso di Calcolo Numerico
 Corso di Laurea in Ingegneria Gestionale Sede di Fermo Corso di 7 - CALCOLO NUMERICO CON MATRICI Richiami teorici Operazioni fondamentali Siano A = {a ij } e B = {b ij }, i = 1,..., m, j = 1,..., n due
Corso di Laurea in Ingegneria Gestionale Sede di Fermo Corso di 7 - CALCOLO NUMERICO CON MATRICI Richiami teorici Operazioni fondamentali Siano A = {a ij } e B = {b ij }, i = 1,..., m, j = 1,..., n due
La Trasformata di Fourier
 La Trasformata di Fourier Preliminari: Spazi di Hilbert Da Wikipedia In matematica uno spazio di Hilbert è uno spazio vettoriale che generalizza la nozione di spazio euclideo. Gli spazi di Hilbert sono
La Trasformata di Fourier Preliminari: Spazi di Hilbert Da Wikipedia In matematica uno spazio di Hilbert è uno spazio vettoriale che generalizza la nozione di spazio euclideo. Gli spazi di Hilbert sono
2. Risolvere con il metodo di eliminazione di Gauss con pivoting parziale il seguente sistema lineare:
 Esercizi sui metodi diretti per la risoluzione di sistemi lineari 1. Data la matrice 1 0 2 1 3 1 5 2 1 determinare la sua fattorizzazione P LR. Risolvere il sistema Ax = b con b = (3, 5, 6) T mediante
Esercizi sui metodi diretti per la risoluzione di sistemi lineari 1. Data la matrice 1 0 2 1 3 1 5 2 1 determinare la sua fattorizzazione P LR. Risolvere il sistema Ax = b con b = (3, 5, 6) T mediante
CAMPO MAGNETICO ROTANTE
 CAPO AGNETICO ROTANTE Un solo avvolgimento percorso da corrente comunque variabile nel tempo sostiene una distribuzione di f.m.m. (e quindi di induzione) fissa nello spazio e con asse di simmetria diretto
CAPO AGNETICO ROTANTE Un solo avvolgimento percorso da corrente comunque variabile nel tempo sostiene una distribuzione di f.m.m. (e quindi di induzione) fissa nello spazio e con asse di simmetria diretto
Elementi di Algebra e di Matematica Discreta Numeri interi, divisibilità, numerazione in base n
 Elementi di Algebra e di Matematica Discreta Numeri interi, divisibilità, numerazione in base n Cristina Turrini UNIMI - 2016/2017 Cristina Turrini (UNIMI - 2016/2017) Elementi di Algebra e di Matematica
Elementi di Algebra e di Matematica Discreta Numeri interi, divisibilità, numerazione in base n Cristina Turrini UNIMI - 2016/2017 Cristina Turrini (UNIMI - 2016/2017) Elementi di Algebra e di Matematica
Fisica dei mezzi trasmissivi Prof. G. Macchiarella Prova del 28 Febbraio 2013
 Fisia dei mezzi trasmissivi Prof. G. Mahiarella Prova del 8 Febbraio 013 1 3 4 non srivere nella zona soprastante COGNOME E NOME MTRICO FIRM Eserizio 1 Un generatore, la ui tensione varia nel tempo ome
Fisia dei mezzi trasmissivi Prof. G. Mahiarella Prova del 8 Febbraio 013 1 3 4 non srivere nella zona soprastante COGNOME E NOME MTRICO FIRM Eserizio 1 Un generatore, la ui tensione varia nel tempo ome
Annamaria Mazzia. Corso di Metodi Numerici per l Ingegneria dispense e altro materiale su
 Soluzione di un sistema non lineare con la Regula Falsi generalizzata per la determinazione degli angoli conico di taglio ed elicoidale di taglio di una cremagliera Annamaria Mazzia Dipartimento di Metodi
Soluzione di un sistema non lineare con la Regula Falsi generalizzata per la determinazione degli angoli conico di taglio ed elicoidale di taglio di una cremagliera Annamaria Mazzia Dipartimento di Metodi