Operazioni sulle immagini. Multimedia
|
|
|
- Aniella Pieri
- 6 anni fa
- Visualizzazioni
Transcript
1 Operazioni sulle immagini
2 Semplificazione: toni di grigio Per semplificare la trattazione del problema lavoreremo solo su immagini a toni di grigio. Le medesime operazioni descritte per tali immagini si estendono alle immagini RGB operando separatamente sui tre canali (piani) R, G e B e trattando ciascuno di essi come una immagine a toni di grigio indipendente dagli altri canali (soluzione non sempre apprezzata in ambito della ricerca).
3 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione standard, quartili, percentili... Particolarmente importante è la conoscenza della distribuzione delle frequenze dei toni di grigio: l istogramma.
4 Istogramma Per ogni livello di grigio, riporta il numero di pixel di quel colore. Per una immagine I[m,n] si ha H(k)= numero di pixel di valore k E la somma di tutti gli H è esattamente mxn L istogramma è utile a comprendere in maniera immediata le caratteristiche dell immagine.
5 Istogramma 5

6 Immagini diverse potrebbero avere istogrammi simili! L istogramma non tiene conto della distribuzione spaziale 6 dei pixel!
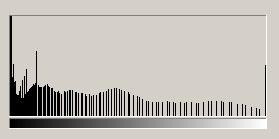
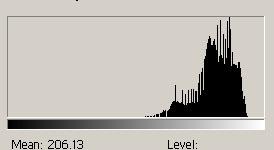
7 Immagine chiara: istogramma più denso a destra 7
8 Immagine scura: istogramma più denso a sinistra 8
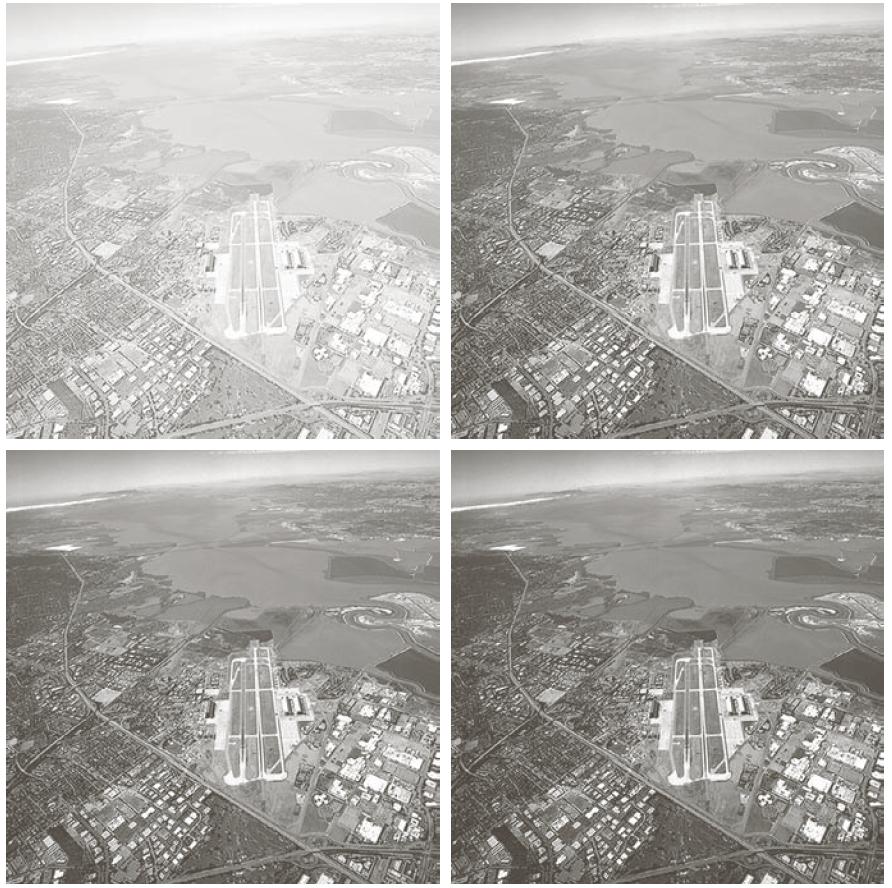
9 Immagine sottoesposta 9
10 Immagine sovraesposta 10
11 Operazioni sulle immagini 11
12 Operazioni sulle immagini Sono operazioni alterano i valori dei pixel di una immagine. L immagine finale apparirà differente da quella iniziale. Questi operatori lavorano sia su immagini a colori che su immagini a toni di grigio. 12
13 Operazione su una immagine Le elaborazioni nel dominio spaziale possono essere espresse come: g ( x, y) = T[ f ( x, y)] essendo f l immagine di ingresso alla elaborazione, g quella di uscita e T un operatore su f definito in un intorno di (x,y). 13
14 Tipi di operazioni La dimensione dell intorno di (x,y) definisce il carattere della elaborazione: puntuale (l intorno coincide con il pixel stesso); locale (per esempio una piccola regione quadrata centrata sul pixel); globale (l intorno coincide con l intera f). 14
15 Operatori puntuali 15
16 Operatori puntuali Si dice operatore puntuale, un operatore che preso in input il valore di un pixel ne restituisce uno cambiato che dipende esclusivamente dal valore del pixel in ingresso. 16
17 Tipiche operazioni puntuali: aggiunta o sottrazione di una costante a tutti i pixel (per compensare sotto o sovraesposizioni); inversione della scala dei grigi (negativo); espansione del contrasto; modifica (equalizzazione o specifica) dell'istogramma; presentazione in falsi colori. 17
18 Operatori puntuali Un operatore puntuale può essere rappresentato da una funzione che preso in input un valore x lo modifica in un valore y=f(x) con x,y appartenenti allo stesso campo di definizione (es. entrambi tra 0 e 255). Poiché un operatore puntuale dipende solo dal valore del pixel esso è completamente descritto da una tabella come quella che segue: IN OUT f(0) f(1) f(2) f(3) f(4) f(5) f(6) f(7) 18
19 Questa è universalmente l interfaccia che tutti i programmi commerciali di immagini offrono per la visualizzazione e gestione delle operazioni puntuali OUT f(x) 8 7 X X X 6 X 5 X 4 X 3 X X 2 X x IN
20 LUT Questo tipo di grafico si chiama look-up tables (LUT). 20

21 In Photoshop: aggiusta curve 21

22 Negativo E la più semplice operazione puntuale. Consiste nell associare al valore x del pixel il valore 255-x 22


23 Negativo Come cambia la curva? 23

24 Negativo Cosa cambia nell istogramma? 24

25 Esempio (a) Mammografia digitale (b) Negativo dell immagine ottenuta usando la trasformazione negativo


26 Incupimento dell immagine Come devo modificare la mia curva? 26

27 Incupimento dell immagine Cosa è cambiato nell istogramma? 27


28 Schiarimento dell immagine Come devo modificare la curva? 28

29 Schiarimento dell immagine Come è cambiato l istogramma? 29
30 Trasformazione logaritmica Si tratta di una trasformazione che consente di comprimere la gamma dinamica, permettendo la memorizzazione o la visualizzazione, con una scala dei grigi usuale, di immagini caratterizzate da escursioni di intensità molto ampie. Può essere espressa come: s = clog( 1+ r Dove c è una costante positiva che serve a normalizzare il risultato tra 0 e 255. ) 30
31 31

32 Trasformazione logaritmica 32
33 Trasformazione di potenza La trasformazione di potenza può essere espressa come: γ s = cr dove c e γ sono costanti positive. La costante c è scelta di volta in volta in modo da normalizzare i valori di s nell intervallo [0, 255]. Come vedremo, per valori di γ minori di 1 la trasformazione ha effetti analoghi alla trasformazione logaritmica (espansione della dinamica per bassi valori di r, compressione della dinamica per alti valori di r), mentre per valori di γ maggiori di 1 la trasformazione ha esattamente gli effetti opposti. 33
34 LUT al variare di gamma 34

35 35

36 Esempi Originale Gamma=3 Gamma=10 36 Gamma=17


37 37

38 38
39 Applicazione di gamma alla resa dei monitor Su un monitor CRT (con γ= 2.5) si può applicare una correzione pre-processando l input con la corrispondente funzione inversa: s = r 1/2.5 = r


40 40

41 Binarizzazione Produce una immagine che ha solo due livelli: nero e bianco. Si ottiene scegliendo una soglia T e mettendo a nero tutti i pixel il cui valore è minore a T e a bianco tutti gli altri. 41

42 Binarizzazione Come si agisce sulla curva? 42

43 Binarizzazione Come cambia l istogramma? 43
44 Variazioni di contrasto Aumentare il contrasto, significa rendere più evidenti le differenze di colore. Ciò si ottiene andando a cambiare il valore di un pixel con un altro che sia più scuro o più chiaro. 44
45 Aumento del contrasto 45

46 Aumento del contrasto Come si deve cambiare la curva? 46
47 47

48 Aumento del contrasto Cosa cambia nell istogramma? 48

49 Contrast Enhancement

50 Altro esempio 50
51 Diminuizione di contrasto 52

52 Diminuizione del contrasto Come cambio la curva? 53

53 Diminuizione del contrasto Come cambia l istogramma? 54

54 Curve non monotone È possibile fare delle variazioni alle curve in modo che questa diventi non monotona. Un esempio è la solarizzazione 55

55 Curve non monotone Ecco come si deve cambiare la curva: 56

56 Curve non monotone Ecco come è cambiato l istogramma: 57
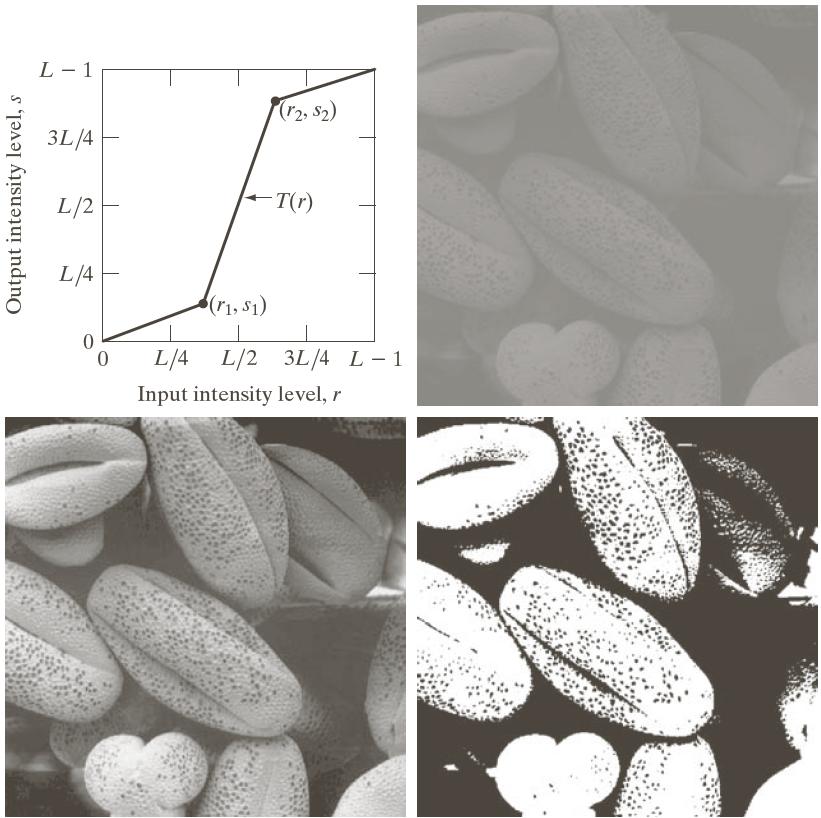
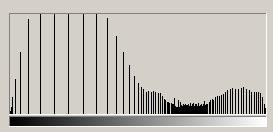
57 Espansione del contrasto (contrast stretching) Serve per aumentare la dinamica di un immagine il cui istogramma è concentrato su un intervallo limitato dei valori possibili. Si ottiene spostando (con appositi algoritmi) i valori di un bin dell istogramma verso un altro bin non utilizzato. L istogramma apparirà in maniera differente, tipo pettine. Ciò è fatto per mettere in risalto che i bin mancanti sono stati distribuiti lungo altri livelli. 58


58 Contrast stretching Immagine originale Immagine corretta Toni non usati
59 Aritmetica sulle immagini Operando aritmeticamente può accadere che un pixel abbia: a) Un valore negativo; b) Un valore maggiore del massimo (tipicamente 255); c) Un valore non intero (facilmente risolubile con una approssimazione o un troncamento); 60
60 Normalizzazione I problemi a) e b) della precedente slide si chiamano problemi di range. Due le soluzioni più comuni: Settare a 0 (nero) i valori negativi e a 255 (bianco) i valori maggiori di 255. Ri-normalizzare il range trasformando ciascun valore secondo la equazione: v nuovo = 255 * (v vecchio min osservato ) (max osservato min osservato ) 61
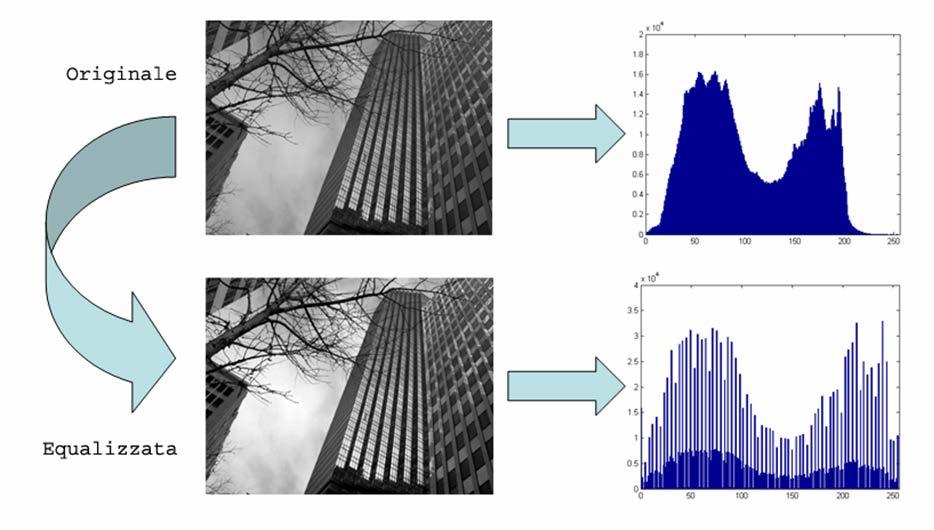
61 Equalizzazione Si parla di immagine equalizzata quando il contributo di ogni differente tonalità di grigio è pressappoco eguale. Si parla anche di istogramma uniforme o appiattito. L equalizzazione si ottiene usando appositi algoritmi Attenzione non sempre la equalizzazione migliora l immagine! 62

62 Immagine equalizzata


63 Immagine equalizzata 64
64 65
65 Algoritmo di Equalizzazione Se r k è un livello di grigio e n k il numero di pixel nell immagine MxN di quel livello di grigio, si può definire Se facciamo il plot di r k versus p r (r k ) quello che si ottiene è l istogramma dell immagine. 66
66 Algoritmo di Equalizzazione I nuovi valori di grigio dell istogramma sono così definiti: 67
67 Algoritmo di Equalizzazione: Esempio Sia data una immagine a 3 bit (L=8) con 64x64 pixel (MN=4096) con la seguente distribuzione di intensità: 68
68 Algoritmo di Equalizzazione: Esempio Applicando la formula si ha: Arrotondando: 69

69 Algoritmo di Equalizzazione: Esempio 70
70 Algoritmo di Equalizzazione: Esempio 71


71 Equalizzazione: un esempio
72 Equalizzazione dell Istogramma Come si può notare, l istogramma della immagine equalizzata non è piatto. D altro canto, l uniformità della p s (s) è stata verificata solo nel caso continuo, e non nel caso discreto. Tuttavia, i livelli di grigio dell immagine equalizzata spaziano su tutta la dinamica possibile (anche se alcuni livelli possono non essere presenti), ed in particolare raggiungono sempre il bianco. Al conseguente incremento del contrasto si possono aggiungere effetti sgradevoli quali lo sgranamento dell immagine, la comparsa di false regioni, ecc., soprattutto quando il contrasto dell immagine originale è molto basso. L apparenza dell immagine può essere migliorata anche con altre tecniche di modifica del contrasto, ma l equalizzazione dell istogramma ha il vantaggio di essere completamente automatica.
73 Bit-plane Un immagine con una profondità colore di N bit può essere rappresentata da N piani di bit (bit-planes), ciascuno dei quali può essere vista come una singola immagine binaria. In particolare si può indurre un ordine che varia dal Most Significant Bit (MSB) fino al Least Significant Bit (LSB). 91

74 Bit-plane 92
 Least Significant bit (LSB)")
75 Bit-planes Most Significant bit (MSB) Least Significant bit (LSB) 93


76 Bit-planes 94
77 Bit-planes: Osservazioni I piani di bit più significativi contengono informazioni sulla struttura dell immagine, mentre quelli via via meno significativi forniscono i dettagli sempre più piccoli. Si noti che solo i piani dal 7 al 3 contengono dati significativi dal punto di vista visuale. Il rumore delle immagini e gli errori di acquisizione sono più evidenti nei piani bassi. 95

78 Bit-planes 96

79 Bit-plane 97
80 Esempio: Questo genere di scomposizione è molto utile per eliminare tutti i valori compresi in un certo range. Ad esempio, se si vogliono eliminare tutti i grigi compresi tra 32 e 64, è necessario porre a 0 il quinto bit, e quindi tutto il piano 5. 98

81 Bit-plane 99

82 100
83 Operatori locali 101
84 Operazioni locali Il valore d uscita di ogni pixel dipende da un limitato intorno del corrispondente punto in input. Sono usati per migliorare la qualità delle immagini o per estrarre delle informazioni dall immagine. Si possono pensare come filtraggi dell immagine. Un filtraggio è ottenuto facendo la convoluzione tra l immagine ed una matrice. 102
85 Operatori Lineari Un operatore F : V W si dice LINEARE se per ogni coppia di vettori v 1 e v 2 in V e per ogni coppia di scalari a,b si ha che: F(a v 1 + b v 2 ) = a F(v 1 ) + b F(v 2 ) Conseguenza: se conosco una base di V ed il comportamento dell operatore F su ogni elemento di tale base, posso calcolare il comportamento di F su ogni elemento di V. 103
86 Esempi Sia F l operatore da R 3 a R 3 che trasforma ogni vettore (x,y,z) in (x/2, y/3, z/4). Esso è lineare ed è completamente descritto una volta che si descrive il suo comportamento su ogni elemento della base canonica: F((1,0,0)) = (1/2, 0, 0); F((0,1,0)) = (0, 1/3, 0); F((0,0,1)) = (0, 0, 1/4). L operatore puntuale negativo NON E LINEARE perché F((x,y,z)) = (255-x, 255-y, 255-z); È diverso da x*f((1,0,0))+y* F((0,1,0)) z* F((0,0,1)) = x*(255-1, 0, 0)+y* (0, 255-1, 0)+z*(0, 0, 255-1) = x*(255-1)+y* (255-1)+z*(255-1) 104
87 NON invariante per traslazione L esempio nella slide precedente ha un comportamento che non è lo stesso su tutti gli elementi della base canonica di R N. Infatti: il comportamento varia da elemento ad elemento a seconda della posizione all interno della immagine. Questo è un operatore NON invariante per traslazioni! Per descrivere questi operatori, dobbiamo conoscere il suo comportamento su ciascun impulso in ciascuna locazione delle immagini! Attenzione: questi operatori non sono cattivi ma solo difficili da studiare 105
88 Operatori invarianti per traslazione Un operatore si dice invariante per traslazione (shift invariant) quando il suo comportamento sulle immagini impulsive è sempre il medesimo indipendentemente dalla posizione in cui si trova il pixel. Tutti gli operatori puntuali sono invarianti per traslazione (anche se non sono lineari). 106
89 Riassumendo: Se F è lineare per descriverlo basta conoscere il comportamento su tutte le immagini impulsive Se F è shift invariant si comporta allo stesso modo su tutti gli impulsi, indipendentemente dalla loro posizione Se F è sia lineare che shift invariant per descriverlo basta conoscere come si comporta su un solo impulso. La risposta all impulso o point spread function di F è la carta di indentità di tale operatore. 107
90 Ad un operatore lineare e shift invariante corrisponde una maschera ma vale anche il viceversa: ad una maschera corrisponde un simile operatore ESEMPIO Si consideri l operazione che preso un impulso: lo trasforma in: Tale risposta all impulso o PSF definisce completamente un operatore lineare e invariante per traslazioni F. Spesso un operatore su una immagine prende il nome di filtro. La matrice che descrive la risposta all impulso si chiama anche kernel o maschera dell operatore. Essa è detta anche maschera di convoluzione di F per ragioni che vedremo tra breve. 108
91 prima dopo 109
92 Kernel finiti o infiniti e complessità La grandezza del kernel può variare fino ad essere infinita Per ragioni pratiche, però, si usano solo kernel con dimensioni finite. Le dimensioni del kernel influenzano la complessità della operazione di filtraggio. Tale complessità dipende ovviamente anche dal numero dei pixel di una immagine. 110
93 Perché filtri convolutivi? I filtri lineari e invarianti per traslazione vengono chiamati anche filtri convolutivi. Dobbiamo studiare la operazione di convoluzione per capire meglio come un filtro può essere calcolato. Inoltre la convoluzione è un fenomeno estremamente importante per ogni tipo di signal processing e per la descrizione di numerosi eventi fisici. 111
94 Convoluzione: proprietà Per indicare l operazione di convoluzione si usa la notazione h = f g La convoluzione è commutativa f g = g f La convoluzione è associativa (f g) h = f (g h) 112
95 g f 113
96 Nel caso finito (1) Se il kernel f ha dimensioni kxh la formula va riscritta nella seguente maniera h k 2 = k / 1 h / 2 1 m, n = * i 2 j= h / 2 ( f ) i, j gm+ i, n+ j a b c d e f g h i Se gli indici del kernel sono disposti in modo da avere il punto di coordinate (0,0) nella posizione centrale. 114
97 Nel caso finito (2) h Se il kernel f ha dimensioni kxh la formula va riscritta nella seguente maniera k, h = m, n fi, j * i= 1, j= 1 g m+ ( i k + k / 2 ), n+ ( j h+ h / 2 Se gli indici del kernel sono disposti partendo da 1 fino ad arrivare ad h o k. ) a b c d e f g h i 115
98 Esempio
99 Esempio
100 Esempio
101 Esempio
102 Convoluzione e filtraggio Applicare un filtro lineare e shift invariante ad una immagine è equivalente a calcolare la convoluzione del kernel del filtro con l immagine. 120
103 Nell implementazione Un problema è quello dei bordi: come fare la convoluzione e il filtraggio ai bordi? POSSIBILI SOLUZIONI: a) Filtrare solo le zone centrali dell immagine b) Supporre che tutto intorno all immagine ci sia 0 c) Assumere una topologia toroidale : quando si sfora a destra si rientra a sinistra, quando si sfora in basso di rientra in alto e viceversa; d) Aggiungere una riga all inizio uguale alle riga precedente, una riga alla fine uguale all ultima riga, una colonna all inizio uguale alla colonna iniziale, e una colonna alla fine uguale alla colonna finale. 121
104 a) Filtrare solo le zone centrali dell immagine input Le aree in grigio non verranno calcolate output
105 b) Supporre che tutto intorno all immagine di input ci sia lo 0 input output
106 c) Riempire le righe e le colonne aggiunte in maniera toroidale input output
107 d) Riempire le righe e le colonne aggiunte con i valori più vicini input output
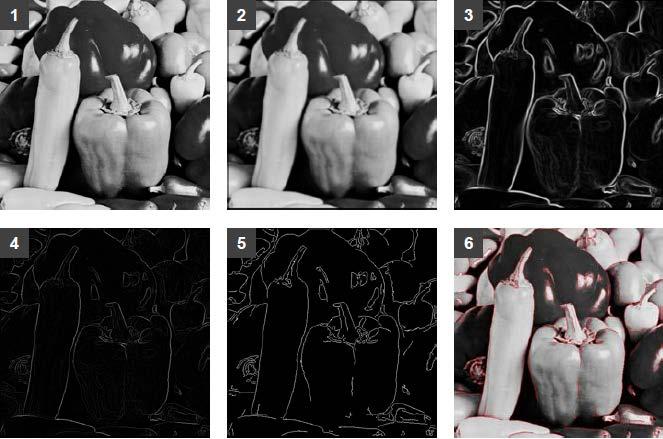
108 Estrazione di contorni 126
109 Caratteristiche di immagini In Visione Computazionale il termine feature di immagini si può riferire a due entità possibili: Una proprietà globale di un immagine o una regione (es. il livello di grigio medio, la distribuzione di colore,...); Una parte dell immagine con alcune proprietà speciali (es. una linea, un ellisse,...) Le caratteristiche o proprietà di cui devono godere tali features, per poter essere utilizzate in maniera robusta dipendono dal contesto applicativo
110 Feature Tipicamente le feature hanno una dimensione molto ridotta rispetto ai dati di origine (ad esempio da un immagine di alcuni MB si potrebbero voler estrarre solo poche decine di valori). Sono generalmente (ma non necessariamente) costituite da una serie di dati numerici, rappresentabile come un vettore multidimensionale. Esempi di finalità specifiche che la fase di feature extraction si può prefiggere (per esempio per migliorare il successivo riconoscimento): Riduzione del rumore e di altre informazioni non utili Estrazione di dati invarianti per determinate trasformazioni (es. rotazione e scala) Normalizzazione dei dati per renderli maggiormente confrontabili
111 Feature globali Le feature globali (per immagini non opportunamente segmentate) sono inefficaci se l oggetto cercato non è separato dal background L orientazione corrente è utilizzare feature locali che in genere dipendono sia dalla forma che dalla texture degli oggetti presenti nella scena
112 Feature locali Un passo importante dell elaborazione visiva consiste nell identificare feature locali che siano utili ad interpretare l immagine. Le feature locali sono parti dell immagine facilmente rilevabili, che possono corrispondere o meno a parti della scena. Ci occuperemo nell ordine di Edge.

113 Edge Detection L estrazione dei contorni (edge) è sicuramente uno degli argomenti che hanno ricevuto più attenzione nella letteratura sull image processing. Il contorno di un oggetto rappresenta infatti la separazione tra l oggetto e lo sfondo o tra l oggetto ed altri oggetti, per cui la sua estrazione è molto spesso il primo passo verso l individuazione dell oggetto.


114 Edge su Lena
115 Origine degli edge surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity
116 Edge Detection Un edge si presenta in una immagine come il confine tra due regioni caratterizzate da proprietà dei livelli di grigio in qualche modo distinguibili. Ipotizziamo inizialmente che le regioni in questione siano sufficientemente omogenee, di modo che la determinazione della transizione tra le due regioni sia possibile sulla sola base della discontinuità dei valori di grigio. Le prime tecniche di edge detection che analizziamo sono basate sull applicazione di un operatore locale di derivata.
117 Edge Detection: Teoria Consideriamo il comportamento delle derivate in corrispondenza a particolari andamenti del livello di grigio f(x): andamento costante (segmento piatto nel caso 1-D) e discontinuità, sia a gradino che a rampa, che possono modellare punti isolati, linee ed edge in una immagine. Le derivate di una funzione digitale possono essere definite in termini delle differenze tra i valori assunti dalla funzione in punti vicini. Qualunque sia il modo con cui si utilizzano queste differenze, devono essere soddisfatti i seguenti requisiti. La derivata prima deve essere nulla nelle zone piatte non nulla in presenza di una discontinuità non nulla lungo una rampa
118 Estrazione dei contorni Gli operatori locali ci aiutano ad estrarre i contorni da una immagine. I contorni sono definiti come delle discontinuità locali della luminanza. Gli edge detector forniscono immagini in cui sono preservate le variazioni di luminanza ed eliminate tutte le altre informazioni. 136
119 Esempi di lato in 1D 137

120 Edge in pratica

121 Direzione del gradiente
122 Edge detector basati sulla derivata prima Se ho un segnale monodimensionale e calcolo la derivata prima, scopro che i lati sono i corrispondenza dei massimi della derivata. Quindi i filtri devono calcolare la derivata in direzione x quella in direzione y e poi combinarle insieme. 140
123 Filtri basati sul gradiente L implementazione di queste equazioni può essere effettuata usando le seguenti maschere 2x2 dette anche operatori di Roberts: I valori assoluti delle risposte delle due maschere vengono sommati per determinare f. Più comune è tuttavia l impiego di maschere 3x3, che rendono più semplici le operazioni di filtraggio:

124 Operatori di Roberts: Esempi
125 Filtri basati sul Gradiente Gli operatori di gradiente sicuramente più diffusi, in grado di effettuare simultaneamente la differenziazione lungo una direzione e una media spaziale lungo la direzione ortogonale, che riduce la sensibilità al rumore, sono: Prewitt Sobel
126 Kernel notevoli: lati orizzontali Ne esistono molti, ne presentiamo due: X-Prewitt 144
127 Sobel x 145

128 Prewitt x 146

129 Dopo l applicazione di X-Prewitt e un passo di equalizzazione Dopo l applicazione di x-sobel e un passo di equalizzazione
130 Kernel notevoli: lati verticali La situazione è identica al caso dei lati orizzontali, i filtri sono solo ruotati di 90 gradi. 148
131 Sobel y 149
132 Prewitt y 150

133 Dopo l applicazione di Y-Prewitt e un passo di equalizzazione Dopo l applicazione di y-sobel e un passo di equalizzazione
134 Migliori risultati Si ottengono con algoritmi più sofisticati (non lineari) per il calcolo della grandezza del gradiente (somma del quadrato della risposta di un edge finder orizzontale e del quadrato della risposta di un edge finder verticale) Si ottengono con strategie più intelligenti (algoritmo di Canny, algoritmi fuzzy, tecniche di backtracking eccetera) 152
135 Edge detector basati sulla derivata seconda Se ho un segnale monodimensionale e calcolo la derivata seconda, scopro che in corrispondenza del lato essa passa per lo zero. 153
136 Kernel notevoli: Laplaciano Il filtro più diffuso per calcolare la derivata seconda è detto Laplaciano, ed è definito dalla maschera: 154
137 Laplaciano 155

138 Laplaciano 156

139 Zero-crossing Dopo aver applicato l operatore Laplaciano è necessario che si verifichi la condizione di Zero-crossing. Cioè, deve sempre accadere che rispetto al punto in questione ci sia nel suo intorno un valore positivo e un valore negativo. 157
140 Filtri di sharpening Sono filtri il cui scopo è quello di incrementare la nitidezza di una immagine aumentando il contrasto locale. Questa è una operazione opposta allo sfocamento. Per ottenere tale effetto si può adottare una maschera che, derivata dal Laplaciano, rinforza i lati presenti nell immagine. Purtroppo essa rinforza anche il rumore presente nella immagine! 158

141 Filtro di sharpening 159
142 Unsharp mask: un algoritmo non lineare L uso del kernel derivato dal Laplaciano per fare edge enhancing ha un difetto: esso viene applicato SEMPRE a tutti i pixel dell immagine. Come conseguenza esso accentua i dettagli anche nelle zone omogene mettendo in evidenza i difetti ed il rumore. Sono stati proposti vari algoritmi per evitare questo fenomeno. La famiglia di algoritmi chiamata unsharp mask è la più famosa usata per questo scopo. Noi non vedremo i dettagli di questo algoritmo. 160

143 Edge Detection in pratica

144 Ancora Noise Gli operatori di gradiente risultano quindi poco efficaci in presenza di rumore. Per esempio, applicando gli operatori di Sobel ad una versione rumorosa dell immagine di test si ottiene: Il problema può essere alleviato estendendo l area di calcolo del gradiente, il che consente una migliore azione di media (Farlo per esercizio). Più in generale, possono essere presi in considerazione degli operatori composti, nei quali una operazione di smoothing per la riduzione del rumore è compiuta prima dell operazione di differenziazione.
145 Operatore DroG Un esempio molto noto di operatore di gradiente composto è la Derivata della Gaussiana (DroG), nel quale l operazione di smoothing utilizza una funzione gaussiana. La gaussiana è una funzione a simmetria rotazionale la cui equazione nel caso 2-D continuo è la seguente: h( x, y) = e 2 x + y 2 2σ 2 = e 2 r 2σ 2 Il valore di σ determina l apertura della Gaussiana (ovvero la deviazione standard ossia ossia il valore di r per il quale h si riduce a 1/ e del massimo), che aumenta al crescere di σ.
146 Operatore DroG In figura una funzione gaussiana in cui h è rappresentata, per diversi valori di σ, al variare di r, quindi in un piano passante per il suo asse di simmetria. Dalla risposta impulsiva è possibile ricavare i coefficienti del relativo kernel di convoluzione attraverso un opportuno campionamento della funzione continua, a partire dalla origine, che rappresenta il punto di applicazione della maschera. Nel caso della gaussiana il ruolo di σ è determinante nella definizione dei pesi della maschera: se l apertura è maggiore, l azione di filtraggio può riguardare un intorno più ampio del punto centrale. A tal fine, σ è normalmente espresso in pixel.
 Per quanto riguarda l operatore DroG, le risposte impulsive lungo le due direzioni, che lo caratterizzano completamente, si possono determinare effettuando la")
147 Gaussiana con Kernel 3x3, 5x5 (sigma = 0.5) Per quanto riguarda l operatore DroG, le risposte impulsive lungo le due direzioni, che lo caratterizzano completamente, si possono determinare effettuando la convoluzione delle due componenti del gradiente, nella formulazione preferita, con la maschera precedente che caratterizza la gaussiana.
148 Operatore DroG In alternativa, si può procedere al calcolo delle derivate della gaussiana rispetto a x e a y, che rappresentano le componenti dell operatore DroG nel caso continuo: h x = 2 x + y 2 2σ 2 x + y 2σ 2 2 x y 2 σ 2 e Le corrispondenti maschere si possono ottenere campionando le due funzioni. Per esempio, per la componente lungo x si ha la seguente situazione, sempre nell ipotesi σ = 0.5: h y = σ 2 e

149 Operatore DroG
150 Operatori basati sul Laplaciano La determinazione degli zero crossing della derivata seconda della f(x,y) localizza con precisione i contorni dell immagine, mentre il segno della derivata seconda permette di stabilire l appartenenza di un pixel al versante scuro o al versante chiaro di un contorno. Un modo molto comune di effettuare le operazioni di derivata seconda di una f(x,y) in un punto è quello di calcolare il laplaciano in quel punto. Ricordiamo che data una funzione f(x,y), il laplaciano di f in (x,y) è definito come: L( x, y) = 2 f = 2 f 2 x + 2 f 2 y
151 OPERATORE LAPLACIANO Con la traslazione di un pixel in orizzontale, ottenuta sostituendo j con j-1 si calcola il valore approssimato del laplaciano nel punto (i,j) definito da: 2 f 2 = f ( i, j + 1) 2 f ( i, j) + f ( i, j 1) x operando in modo analogo per la componente verticale si ottiene: 2 f 2 = f ( i + 1, j) 2 f ( i, j) + f ( i 1, j) y Queste approssimazioni conducono alle corrispondenti maschere di convoluzione orizzontale e verticale: 1 h R = [ 1 2 1] h C = 2 1 Dalla combinazione delle componenti orizzontali e verticali si ottiene una singola maschera di convoluzione del laplaciano: h( i, j) = =
152 Operatori basati sul Laplaciano Il modo più semplice di approssimare il laplaciano nel caso discreto consiste nel calcolo delle differenze delle derivate prime lungo i due assi: L(x,y)=[f(x,y)-f(x-1,y)]-[f(x+1,y)-f(x,y)]+[f(x,y)-f(x,y-1)]-[f(x,y+1)- f(x,y)] Pertanto L(x,y)=4 f(x,y)-f(x-1,y)-f(x+1,y)-f(x,y -1)- f(x,y+1) Il Laplaciano si può quindi implementare come un filtro la cui risposta impulsiva è:
153 Operatori basati sul Laplaciano La versione normalizzata prevede un fattore moltiplicativo pari a ¼ Una versione (normalizzate) del laplaciano riferito agli 8-vicini, quindi con le differenze delle derivate prime mediate su tre righe e tre colonne, è: In questo caso il fattore moltiplicativo è pari a 1/8. Il laplaciano è eccessivamente sensibile al rumore (in quanto operatore di derivata seconda) ed è incapace di rilevare la direzione del contorno (in quanto entità scalare). Per tali motivi, il laplaciano è raramente usato da solo per l edge detection.
154 Laplacian of Gaussian Di Marr e Hildreth è stata l idea di utilizzare il laplaciano in connessione con un filtro di smoothing, ancora una volta una gaussiana, realizzando un operatore detto Laplaciano della Gaussiana o LoG (in figura una sezione trasversale ottenuta per σ=1) + = = = ), ( σ σ σ σ σ r r y x e r h e e y x h

155 LoG in 2D Si tratta quindi di una funzione a simmetria circolare, con ZC per r=±σ Si può dimostrare che il valor medio della funzione è 0, e lo stesso avviene per il risultato della sua convoluzione con una immagine. La tipica forma a sombrero indica inoltre che la convoluzione dell operatore LoG con una immagine provoca un blurring (di entità proporzionale a σ) dell immagine stessa, e quindi ha un effetto positivo in termini di riduzione del rumore.

156 LoG Il vantaggio principale offerto dall operatore LoG resta comunque quello legato alla presenza degli ZC. All immagine in alto a sinistra viene applicato l operatore LoG, con il risultato mostrato in alto a destra come immagine di intensità, nella quale i neri rappresentano i valori più negativi, i bianchi i valori più positivi. Dopo la binarizzazione: valori negativi a 0 e i valori positivi a 1 (in basso a sinistra). Gli ZC, cioè i confini tra zone nere e bianche nell immagine binaria, sono ora facilmente individuabili (in basso a destra)

157 Laplaciano e Zero Crossing

158 Edge Linking
159 Metodo di Canny Un approccio analitico è stato invece seguito da J. Canny, che ha studiato in dettaglio il comportamento dell operatore gradiente applicato ad un contorno rumoroso. Il modello di bordo considerato è un fronte ripido monodimensionale b(x) cui è aggiunto rumore Gaussiano bianco. Si assume che l individuazione del bordo sia realizzata tramite una convoluzione con un filtro f(x) avente risposta impulsiva h(x) antisimmetrica e nulla al di fuori di un intervallo [-W,W]. Un bordo è individuato da un massimo locale della convoluzione tra l immagine ed il filtro. Il filtro è scelto sulla base di tre criteri di efficacia definiti da Canny.
160 Criteri di Canny Buona capacità di individuazione: l operatore ha una bassa probabilità di non individuare un bordo reale (elevata sensibilità falsi negativi) ed una bassa probabilità di individuare falsi bordi (elevata specificità falsi positivi) Buona capacità di localizzazione: i punti evidenziati dall operatore dovrebbero essere quanto più vicini possibile al centro del bordo reale Unicità della risposta: l operatore dovrebbe fornire una sola risposta in corrispondenza di un bordo reale
161 Canny edge detector Immagine Input (Lena)

162 Canny edge detector Norma del gradiente

163 Canny edge detector thresholding

164 Canny edge detector Thinning (non-maximum suppression)
165 Canny Step 1 Calcolo Gradiente (Drog): magnitudo e direzione Step 2 Eliminazione dei punti il cui valore del gradiente non è superiore ai valori dei vicini (interpolazione lineare) nella direzione del gradiente Step 3 Sogliatura con Isteresi mediante 2 soglie T1 e T2 Step 4 Edge linking per legare gli strong edge individuati con eventuali weak edge adiacenti
166 Canny Primo Step L Individuazione (detection) dell edge, si realizza attraverso la massimizzazione del rapporto segnale-rumore (delle ampiezze) del gradiente. L espressione adoperata per il rapporto s/r è: dove h E è l ampiezza del gradino mentre σ n è la deviazione standard del rumore.
167 Canny Step 2 I punti riconosciuti come di edge dovrebbero essere il più possibile vicini al centro dell edge effettivo. A tal fine è definito un fattore di localizzazione (h è la derivata di h):
168 Canny Step 3 Per quanto riguarda l unicità della risposta dell operatore la distanza x m tra due picchi del gradiente, in presenza solo di rumore, è supposta uguale ad una frazione k della larghezza W dell operatore: x m =kw Canny ha combinato i tre criteri, cercando il massimo del prodotto S(h)L(h) soggetto al vincolo espresso dalla condizione di cui sopra
169 Canny - Discussioni Anche se la complessità della formulazione impedisce la determinazione di una soluzione analitica, è possibile procedere alla ricerca del massimo con metodi numerici. La figura mostra i profili di diversi valori della risposta impulsiva del filtro di Canny al crescere di x m. Si può notare come per grandi valori di x m l operatore di Canny è ben approssimato dall operatore DroG. In effetti, il filtro adoperato nelle implementazioni del metodo di Canny è proprio di questo tipo.
170 Canny: Non-Maximum Suppression L'immagine di risposta all'operatore, se vista come una superfice 3D, è caratterizzata da valli (valleys) e rilievi. Le curve di massimo dei rilievi, le creste, sono detti ridges. Per ottenere una risposta univoca dall'edge detector è necessario un algoritmo che sopprima tutti i responsi multipli, ovvero i pixel che sono caratterizzati da valori alti di risposta all'operatore ma che non sono massimi locali per esso. La non-maximum suppression si ottiene cercando i pixel che sono di massimo per la magnitudo lungo la direzione del gradiente. Si tengono solo i ridges sopprimendo tutti gli altri punti che non sono all'altezza massima locale.
171 Non-maximum suppression Si verifica l esistenza di un massimo locale lungo la direzione del gradiente. Ciò richiede l interpolazione dei pixel mancanti (pixel p ed r in figura)
172 Canny: Thresholding La qualità dei risultati ottenibili con il metodo di Canny, superiore a quella di tutti gli altri operatori di gradiente, si giustifica con il fatto che il metodo utilizza due soglie, una per la individuazione degli edge più netti, l altra per l individuazione degli edge più deboli. Questi ultimi sono però presi in considerazione solo se risultano connessi ad edge netti. Ruolo fondamentale nell'algoritmo di Canny gioca anche la scelta di sostituire il tradizionale approccio di sogliatura (thresholding) a soglia singola con una tecnica a doppia soglia detta histeresys thresholding.
173 Canny: Thresholding La doppia sogliatura (Histeresys thresholding) viene operata dopo l'applicazione della non-maximum suppression. Si fissano due soglie T1 e T2 con T1>T2 Tutti i punti di valore maggiore di T1 sono di edge; Tutti i punti di valore compreso fra T1 e T2 sono detti weak edges. Un weak edge diventa edge solo se è contiguo ad un edge.
174 Canny Diminuisce pertanto l influenza del rumore, ed aumenta la probabilità di rivelare veri edge deboli. In tutti i metodi di edge detection basati sul gradiente, occorre confrontare il risultato dell operazione di derivazione in ogni punto dell immagine con uno (o più) valori di soglia, per determinare se si tratta di un punto di edge. Il valore di soglia determina direttamente la sensibilità dell edge detector. Per immagini non rumorose, la soglia può essere scelta in modo che le discontinuità di ampiezza, anche relative a zone a basso contrasto, siano interpretate come edge. Nelle immagini rumorose la scelta del valore di soglia è molto più critica, diventando un elemento di tradeoff tra la possibilità di rivelare falsi contorni (indotti dal rumore) e la possibilità di mancare contorni veri (relativi a piccoli dettagli).
 e si usa questa informazione per predire il successivo punto (in questo caso r o s) (Forsyth & Ponce)")
175 Edge Linking Individuato il punto di edge si costruisce la tangente alla curva (normale al gradiente in quel punto) e si usa questa informazione per predire il successivo punto (in questo caso r o s) (Forsyth & Ponce)
176 Canny Integrando la fase di thresholding con quella di linking il metodo ne guadagna in robustezza e versatilità.
177 Canny Step 1 Calcolo Gradiente (Drog): magnitudo e direzione Step 2 Eliminazione dei punti il cui valore del gradiente non è superiore ai valori dei vicini (interpolazione lineare) nella direzione del gradiente Step 3 Sogliatura con Isteresi mediante 2 soglie T1 e T2 Step 4 Edge linking per legare gli strong edge individuati con eventuali weak edge adiacenti
 Input Canny con σ=1 Canny con σ=2 La")


178 Impatto del parametro σ (Gaussian kernel size) Input Canny con σ=1 Canny con σ=2 La scelta di σ impatta sulla detection dei relativi edge come segue: Alti valori di σ permettono di trovare edge a scale più grandi Piccoli valori di σ permettono di scovare I dettagli più fini
179 Esempi
L istogramma. Interazione & Multimedia 2
 Istogramma 1 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione
Istogramma 1 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione
Sharpening mediante filtraggio spaziale
 Sharpening mediante filtraggio spaziale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Sharpening Il termine sharpening
Sharpening mediante filtraggio spaziale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Sharpening Il termine sharpening
Operatori locali su immagini digitali
 Operatori locali su immagini digitali Definizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali Definizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali
 Operatori locali su immagini digitali Deinizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali Deinizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Elaborazione di immagini digitali: trasformare e migliorare
 Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Elaborazione di Immagini e Suoni / Riconoscimento e Visioni Artificiali 12 c.f.u. Anno Accademico 2009/2010 Docente: ing. Salvatore
Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Elaborazione di Immagini e Suoni / Riconoscimento e Visioni Artificiali 12 c.f.u. Anno Accademico 2009/2010 Docente: ing. Salvatore
ELABORAZIONE DELLE IMMAGINI:
 Università degli Studi di Catania Facoltà di Scienze Matematiche,Fisiche e Naturali Corso di Laurea in Informatica, Secondo Livello ELABORAZIONE DELLE IMMAGINI: EDGE DETECTION Corso di Analisi Numerica
Università degli Studi di Catania Facoltà di Scienze Matematiche,Fisiche e Naturali Corso di Laurea in Informatica, Secondo Livello ELABORAZIONE DELLE IMMAGINI: EDGE DETECTION Corso di Analisi Numerica
Istogramma dei livelli di grigio
 Capitolo 4 - Operatori Puntuali 1 Istogramma dei livelli di grigio L istogramma dei livelli di grigio di un immagine è una funzione che associa a ciascun livello il numero di pixel dell immagine aventi
Capitolo 4 - Operatori Puntuali 1 Istogramma dei livelli di grigio L istogramma dei livelli di grigio di un immagine è una funzione che associa a ciascun livello il numero di pixel dell immagine aventi
Operatori locali. Operatori locali. Q=f(P,w)
") Operatori locali Operatori locali P(i,j) Gli operatori locali associano ad ogni piel ( i,j) della immagine di output Q un valore calcolato in un intorno o finestra w centrata nel piel P(i,j) Q=f(P,w) Operatori
Operatori locali Operatori locali P(i,j) Gli operatori locali associano ad ogni piel ( i,j) della immagine di output Q un valore calcolato in un intorno o finestra w centrata nel piel P(i,j) Q=f(P,w) Operatori
Operazioni sulle immagini digitali
 Operazioni sulle immagini digitali Categorie di operatori L istogramma dei livelli di grigio Trasformazioni puntuali Equalizzazione Operazioni su immagini digitali I tipi di operazioni che si possono realizzare
Operazioni sulle immagini digitali Categorie di operatori L istogramma dei livelli di grigio Trasformazioni puntuali Equalizzazione Operazioni su immagini digitali I tipi di operazioni che si possono realizzare
Istogramma dei livelli di grigio
 Istogramma dei livelli di grigio Uno degli strumenti più semplici e più utili nell elaborazione delle immagini l istogramma dei livelli di grigio contenuti in una immagine. istogramma di una immagine contiene
Istogramma dei livelli di grigio Uno degli strumenti più semplici e più utili nell elaborazione delle immagini l istogramma dei livelli di grigio contenuti in una immagine. istogramma di una immagine contiene
Elaborazione nel dominio delle frequenze. Elaborazione delle immagini digitali 1
 Elaborazione nel dominio delle frequenze Elaborazione delle immagini digitali 1 Serie di Fourier Elaborazione delle immagini digitali 2 Introduzione alla trasformata di Fourier Una funzione periodica può
Elaborazione nel dominio delle frequenze Elaborazione delle immagini digitali 1 Serie di Fourier Elaborazione delle immagini digitali 2 Introduzione alla trasformata di Fourier Una funzione periodica può
Elementi di grafica raster
 Elementi di grafica raster Segnali mono-bidimensionali Segnale: variazione di una grandezza fisica rispetto al tempo e/o allo spazio cioè Valore della grandezza ad ogni istante di tempo (spazio) Un segnale
Elementi di grafica raster Segnali mono-bidimensionali Segnale: variazione di una grandezza fisica rispetto al tempo e/o allo spazio cioè Valore della grandezza ad ogni istante di tempo (spazio) Un segnale
Operazioni sulle immagini digitali
 Operazioni sulle immagini digitali Categorie di operatori L istogramma dei livelli di grigio Trasformazioni puntuali Equalizzazione Operazioni su immagini digitali I tipi di operazioni che si possono realizzare
Operazioni sulle immagini digitali Categorie di operatori L istogramma dei livelli di grigio Trasformazioni puntuali Equalizzazione Operazioni su immagini digitali I tipi di operazioni che si possono realizzare
Image segmentation. Elaborazione intermedia
 Image segmentation Edge detection Elaborazione intermedia elaborazione intermedia si occupa di ottenere una descrizione signiicativa della scena mediante la segmentazione suddivisione della immagine in
Image segmentation Edge detection Elaborazione intermedia elaborazione intermedia si occupa di ottenere una descrizione signiicativa della scena mediante la segmentazione suddivisione della immagine in
PIXEL. Il valore quantizzato misurato da ciascun sensore diventa un. PICTURE ELEMENT = PIXEL dell immagine. Interazione & Multimedia
 La risoluzione PIXEL Il valore quantizzato misurato da ciascun sensore diventa un PICTURE ELEMENT = PIXEL dell immagine La risoluzione Definizione: si dice risoluzione il numero di pixel per unità di misura.
La risoluzione PIXEL Il valore quantizzato misurato da ciascun sensore diventa un PICTURE ELEMENT = PIXEL dell immagine La risoluzione Definizione: si dice risoluzione il numero di pixel per unità di misura.
Trasformazioni di intensità Filtraggio spaziale. 31/03/2010 Francesca Pizzorni Ferrarese
 Trasformazioni di intensità Filtraggio spaziale 31/03/2010 Francesca Pizzorni Ferrarese Istogrammi L istogramma è la rappresentazione grafica della quantità di pixel presenti nell immagine per ciascun
Trasformazioni di intensità Filtraggio spaziale 31/03/2010 Francesca Pizzorni Ferrarese Istogrammi L istogramma è la rappresentazione grafica della quantità di pixel presenti nell immagine per ciascun
SCHEDA DIDATTICA N 7
 FACOLTA DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA CIVILE CORSO DI IDROLOGIA PROF. PASQUALE VERSACE SCHEDA DIDATTICA N 7 LA DISTRIBUZIONE NORMALE A.A. 01-13 La distribuzione NORMALE Uno dei più importanti
FACOLTA DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA CIVILE CORSO DI IDROLOGIA PROF. PASQUALE VERSACE SCHEDA DIDATTICA N 7 LA DISTRIBUZIONE NORMALE A.A. 01-13 La distribuzione NORMALE Uno dei più importanti
Cenno al trattamento delle immagini digitali. Cartografia numerica e GIS Domenico Sguerso
 Cenno al trattamento delle immagini digitali Cartografia numerica e GIS Domenico Sguerso Digital Image Processing: Preprocessing (Memorizzazione) analysis Trattamento dell immagine: - ricampionamento necessario
Cenno al trattamento delle immagini digitali Cartografia numerica e GIS Domenico Sguerso Digital Image Processing: Preprocessing (Memorizzazione) analysis Trattamento dell immagine: - ricampionamento necessario
MATEMATICA. a.a. 2014/15
 MATEMATICA a.a. 2014/15 3. DERIVATE E STUDIO DI FUNZIONE (II parte): Massimi, minimi e derivata prima. Flessi e derivata seconda. Schema per lo studio qualitativo completo di una funzione y=f(x) Crescenza
MATEMATICA a.a. 2014/15 3. DERIVATE E STUDIO DI FUNZIONE (II parte): Massimi, minimi e derivata prima. Flessi e derivata seconda. Schema per lo studio qualitativo completo di una funzione y=f(x) Crescenza
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul
Automazione industriale dispense del corso (a.a. 2008/2009) 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul
ESERCITAZIONE SUI PUNTI STAZIONARI DI FUNZIONI LIBERE E SULLE FUNZIONI OMOGENEE
 ESERCITAZIONE SUI PUNTI STAZIONARI DI FUNZIONI LIBERE E SULLE FUNZIONI OMOGENEE 1 Funzioni libere I punti stazionari di una funzione libera di più variabili si ottengono risolvendo il sistema di equazioni
ESERCITAZIONE SUI PUNTI STAZIONARI DI FUNZIONI LIBERE E SULLE FUNZIONI OMOGENEE 1 Funzioni libere I punti stazionari di una funzione libera di più variabili si ottengono risolvendo il sistema di equazioni
3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI
 3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI ESISTENZA DI UN PUNTO DI OTTIMO VINCOLATO Il problema di ottimizzazione vincolata introdotto nel paragrafo precedente può essere formulato nel modo seguente:
3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI ESISTENZA DI UN PUNTO DI OTTIMO VINCOLATO Il problema di ottimizzazione vincolata introdotto nel paragrafo precedente può essere formulato nel modo seguente:
Sistemi lineari. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
HISTOGRAM MATCHING Di Raimondo Graziano - Nicolosi Salvatore Multimedia A.A
 HISTOGRAM MATCHING Di Raimondo Graziano - Nicolosi Salvatore Multimedia A.A 2013-2014 Introduzione Un istogramma è un grafico che mostra la distribuzione delle varie tonalità di una data immagine digitale
HISTOGRAM MATCHING Di Raimondo Graziano - Nicolosi Salvatore Multimedia A.A 2013-2014 Introduzione Un istogramma è un grafico che mostra la distribuzione delle varie tonalità di una data immagine digitale
Corso di Informatica Generale (C. L. Economia e Commercio) Ing. Valerio Lacagnina Rappresentazione dei numeri relativi
 Ing. Valerio Lacagnina Rappresentazione dei numeri relativi") Codice BCD Prima di passare alla rappresentazione dei numeri relativi in binario vediamo un tipo di codifica che ha una certa rilevanza in alcune applicazioni: il codice BCD (Binary Coded Decimal). È un
Codice BCD Prima di passare alla rappresentazione dei numeri relativi in binario vediamo un tipo di codifica che ha una certa rilevanza in alcune applicazioni: il codice BCD (Binary Coded Decimal). È un
ISTOGRAMMI E DISTRIBUZIONI:
 ISTOGRAMMI E DISTRIBUZIONI: i 3 4 5 6 7 8 9 0 i 0. 8.5 3 0 9.5 7 9.8 8.6 8. bin (=.) 5-7. 7.-9.4 n k 3 n k 6 5 n=0 =. 9.4-.6 5 4.6-3.8 3 Numero di misure nell intervallo 0 0 4 6 8 0 4 6 8 30 ISTOGRAMMI
ISTOGRAMMI E DISTRIBUZIONI: i 3 4 5 6 7 8 9 0 i 0. 8.5 3 0 9.5 7 9.8 8.6 8. bin (=.) 5-7. 7.-9.4 n k 3 n k 6 5 n=0 =. 9.4-.6 5 4.6-3.8 3 Numero di misure nell intervallo 0 0 4 6 8 0 4 6 8 30 ISTOGRAMMI
MATRICI E SISTEMI LINEARI
 1 Rappresentazione di dati strutturati MATRICI E SISTEMI LINEARI Gli elementi di una matrice, detti coefficienti, possono essere qualsiasi e non devono necessariamente essere omogenei tra loro; di solito
1 Rappresentazione di dati strutturati MATRICI E SISTEMI LINEARI Gli elementi di una matrice, detti coefficienti, possono essere qualsiasi e non devono necessariamente essere omogenei tra loro; di solito
Lezione 4 1. Introduzione
 Lezione 4 1 Introduzione Le curve di domanda ed offerta servono per determinare possibili scenari futuri in seguito a cambiamenti delle condizioni. Ad esempio, la diminuzione della offerta di petrolio
Lezione 4 1 Introduzione Le curve di domanda ed offerta servono per determinare possibili scenari futuri in seguito a cambiamenti delle condizioni. Ad esempio, la diminuzione della offerta di petrolio
Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari
 Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017 Elementi di Algebra Lineare
Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017 Elementi di Algebra Lineare
La distribuzione delle frequenze. T 10 (s)
") 1 La distribuzione delle frequenze Si vuole misurare il periodo di oscillazione di un pendolo costituito da una sferetta metallica agganciata a un filo (fig. 1). A Figura 1 B Ricordiamo che il periodo
1 La distribuzione delle frequenze Si vuole misurare il periodo di oscillazione di un pendolo costituito da una sferetta metallica agganciata a un filo (fig. 1). A Figura 1 B Ricordiamo che il periodo
Lez. 7 Immagini Digitali. Prof. Pasquale De Michele (Gruppo 2) e Raffaele Farina (Gruppo 1) 1
 e Raffaele Farina (Gruppo 1) 1") Lez. 7 Immagini Digitali Prof. Pasquale De Michele (Gruppo 2) e Raffaele Farina (Gruppo 1) 1 Dott. Pasquale De Michele Dott. Raffaele Farina Dipartimento di Matematica e Applicazioni Università di Napoli
Lez. 7 Immagini Digitali Prof. Pasquale De Michele (Gruppo 2) e Raffaele Farina (Gruppo 1) 1 Dott. Pasquale De Michele Dott. Raffaele Farina Dipartimento di Matematica e Applicazioni Università di Napoli
Morfologia Matematica su immagini in scala di grigio
 Morfologia Matematica su immagini in scala di grigio Dilation, erosion, opening, closing Top-Hat, Bottom-Hat Algoritmi Morfologici in scala di grigio Dalle immagini binarie alle immagini in scala di grigio
Morfologia Matematica su immagini in scala di grigio Dilation, erosion, opening, closing Top-Hat, Bottom-Hat Algoritmi Morfologici in scala di grigio Dalle immagini binarie alle immagini in scala di grigio
Elementi di matematica - dott. I. GRASSI
 Gli assi cartesiani e la retta. Il concetto di derivata. È ormai d uso comune nei libri, in televisione, nei quotidiani descrivere fenomeni di varia natura per mezzo di rappresentazioni grafiche. Tali
Gli assi cartesiani e la retta. Il concetto di derivata. È ormai d uso comune nei libri, in televisione, nei quotidiani descrivere fenomeni di varia natura per mezzo di rappresentazioni grafiche. Tali
Unità aritmetica e logica
 Aritmetica del calcolatore Capitolo 9 Unità aritmetica e logica n Esegue le operazioni aritmetiche e logiche n Ogni altra componente nel calcolatore serve questa unità n Gestisce gli interi n Può gestire
Aritmetica del calcolatore Capitolo 9 Unità aritmetica e logica n Esegue le operazioni aritmetiche e logiche n Ogni altra componente nel calcolatore serve questa unità n Gestisce gli interi n Può gestire
Note sull implementazione in virgola fissa di filtri numerici
 Note sull implementazione in virgola fissa di filtri numerici 4 settembre 2006 1 Introduction Nonostante al giorno d oggi i processori con aritmetica in virgola mobili siano molto comuni, esistono contesti
Note sull implementazione in virgola fissa di filtri numerici 4 settembre 2006 1 Introduction Nonostante al giorno d oggi i processori con aritmetica in virgola mobili siano molto comuni, esistono contesti
Argomento 7. Studio di funzione
 Argomento 7 Studio di funzione Studiare una funzione significa ottenere, mediante strumenti analitici (iti, derivate, ecc.) informazioni utili a disegnare un grafico qualitativo della funzione data. I
Argomento 7 Studio di funzione Studiare una funzione significa ottenere, mediante strumenti analitici (iti, derivate, ecc.) informazioni utili a disegnare un grafico qualitativo della funzione data. I
Sperimentazioni di Fisica I mod. A Statistica - Lezione 2
 Sperimentazioni di Fisica I mod. A Statistica - Lezione 2 A. Garfagnini M. Mazzocco C. Sada Dipartimento di Fisica G. Galilei, Università di Padova AA 2014/2015 Elementi di Statistica Lezione 2: 1. Istogrammi
Sperimentazioni di Fisica I mod. A Statistica - Lezione 2 A. Garfagnini M. Mazzocco C. Sada Dipartimento di Fisica G. Galilei, Università di Padova AA 2014/2015 Elementi di Statistica Lezione 2: 1. Istogrammi
Stabilire se il punto di coordinate (1,1) appartiene alla circonferenza centrata nell origine e di raggio 1.
 appartiene alla circonferenza centrata nell origine e di raggio 1.") Definizione di circonferenza e cerchio. Equazione della circonferenza centrata in O e di raggio R. Esercizi. La circonferenza e il cerchio Definizioni: dato un punto C nel piano cartesiano e dato un numero
Definizione di circonferenza e cerchio. Equazione della circonferenza centrata in O e di raggio R. Esercizi. La circonferenza e il cerchio Definizioni: dato un punto C nel piano cartesiano e dato un numero
SISTEMI LINEARI. x y + 2t = 0 2x + y + z t = 0 x z t = 0 ; S 3 : ; S 5x 2y z = 1 4x 7y = 3
 SISTEMI LINEARI. Esercizi Esercizio. Verificare se (,, ) è soluzione del sistema x y + z = x + y z = 3. Trovare poi tutte le soluzioni del sistema. Esercizio. Scrivere un sistema lineare di 3 equazioni
SISTEMI LINEARI. Esercizi Esercizio. Verificare se (,, ) è soluzione del sistema x y + z = x + y z = 3. Trovare poi tutte le soluzioni del sistema. Esercizio. Scrivere un sistema lineare di 3 equazioni
La variabilità. Dott. Cazzaniga Paolo. Dip. di Scienze Umane e Sociali
 Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it Introduzione [1/2] Gli indici di variabilità consentono di riassumere le principali caratteristiche di una distribuzione (assieme alle medie) Le
Dip. di Scienze Umane e Sociali paolo.cazzaniga@unibg.it Introduzione [1/2] Gli indici di variabilità consentono di riassumere le principali caratteristiche di una distribuzione (assieme alle medie) Le
Processamento di immagini
 Processamento di immagini Applicazioni Immagini biomediche Modifica di immagini Confronto e registrazione... Formazione Ogge=o in - > Immagine out Processamento Immagine in - > Immagine out Analisi Immagine
Processamento di immagini Applicazioni Immagini biomediche Modifica di immagini Confronto e registrazione... Formazione Ogge=o in - > Immagine out Processamento Immagine in - > Immagine out Analisi Immagine
Calcolo numerico e programmazione Rappresentazione dei numeri
 Calcolo numerico e programmazione Rappresentazione dei numeri Tullio Facchinetti 16 marzo 2012 10:54 http://robot.unipv.it/toolleeo Rappresentazione dei numeri nei calcolatori
Calcolo numerico e programmazione Rappresentazione dei numeri Tullio Facchinetti 16 marzo 2012 10:54 http://robot.unipv.it/toolleeo Rappresentazione dei numeri nei calcolatori
Università degli studi di Catania Facoltà di scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Magistrale
 Università degli studi di Catania Facoltà di scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Magistrale Alessandro Ortis Estensione del software ImageJ con l implementazione di un
Università degli studi di Catania Facoltà di scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Magistrale Alessandro Ortis Estensione del software ImageJ con l implementazione di un
Modellazione di sistemi ingegneristici (parte 2 di 2)
") Corso di Teoria dei Sistemi Modellazione di sistemi ingegneristici (parte 2 di 2) Prof. Ing. Daniele Testi DESTeC, Dipartimento di Ingegneria dell Energia, dei Sistemi, del Territorio e delle Costruzioni
Corso di Teoria dei Sistemi Modellazione di sistemi ingegneristici (parte 2 di 2) Prof. Ing. Daniele Testi DESTeC, Dipartimento di Ingegneria dell Energia, dei Sistemi, del Territorio e delle Costruzioni
Le trasformazioni geometriche nel piano cartesiano. x = ϕ(x', y') τ 1 : G(x', y') = 0. la sua inversa.
 τ 1 : G(x', y') = 0. la sua inversa.") τ : P P' oppure P'=τ(P) P immagine di P trasformato di P secondo τ se α è una figura geometrica α =τ(α) è la figura geometrica trasformata x' = f (x, y) τ : y' = g(x, y) espressione analitica della trasformazione
τ : P P' oppure P'=τ(P) P immagine di P trasformato di P secondo τ se α è una figura geometrica α =τ(α) è la figura geometrica trasformata x' = f (x, y) τ : y' = g(x, y) espressione analitica della trasformazione
PROBABILITÀ - SCHEDA N. 3 VARIABILI ALEATORIE CONTINUE E SIMULAZIONE
 PROBABILITÀ - SCHEDA N. 3 VARIABILI ALEATORIE CONTINUE E SIMULAZIONE (da un idea di M. Impedovo Variabili aleatorie continue e simulazione Progetto Alice n. 15, ) 1. La simulazione Nelle schede precedenti
PROBABILITÀ - SCHEDA N. 3 VARIABILI ALEATORIE CONTINUE E SIMULAZIONE (da un idea di M. Impedovo Variabili aleatorie continue e simulazione Progetto Alice n. 15, ) 1. La simulazione Nelle schede precedenti
Introduzione all elaborazione di immagini Part II
 Introduzione all elaborazione di immagini Part II Obiettivi delle tecniche di elaborazione di immagini: miglioramento di qualità (image enhancement) ripristino di qualità o restauro (image restoration)
Introduzione all elaborazione di immagini Part II Obiettivi delle tecniche di elaborazione di immagini: miglioramento di qualità (image enhancement) ripristino di qualità o restauro (image restoration)
N.B. Per la risoluzione dei seguenti esercizi, si fa riferimento alle Tabelle riportate alla fine del documento.
 N.B. Per la risoluzione dei seguenti esercizi, si fa riferimento alle Tabelle riportate alla fine del documento. Esercizio 1 Un chimico che lavora per una fabbrica di batterie, sta cercando una batteria
N.B. Per la risoluzione dei seguenti esercizi, si fa riferimento alle Tabelle riportate alla fine del documento. Esercizio 1 Un chimico che lavora per una fabbrica di batterie, sta cercando una batteria
Appunti di matematica per le Scienze Sociali Parte 1
 Appunti di matematica per le Scienze Sociali Parte 1 1 Equazioni 1.1 Definizioni preliminari 1.1.1 Monomi Si definisce monomio ogni prodotto indicato di fattori qualsiasi, cioè uguali o diseguali, numerici
Appunti di matematica per le Scienze Sociali Parte 1 1 Equazioni 1.1 Definizioni preliminari 1.1.1 Monomi Si definisce monomio ogni prodotto indicato di fattori qualsiasi, cioè uguali o diseguali, numerici
Analogico vs. Digitale. LEZIONE II La codifica binaria. Analogico vs digitale. Analogico. Digitale
 Analogico vs. Digitale LEZIONE II La codifica binaria Analogico Segnale che può assumere infiniti valori con continuità Digitale Segnale che può assumere solo valori discreti Analogico vs digitale Il computer
Analogico vs. Digitale LEZIONE II La codifica binaria Analogico Segnale che può assumere infiniti valori con continuità Digitale Segnale che può assumere solo valori discreti Analogico vs digitale Il computer
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI. (Visione 3D)
") ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
ESTRAZIONE DI DATI 3D DA IMMAGINI DIGITALI () Calibrazione intrinseca Spesso risulta utile calibrare la sola componente intrinseca di un sistema di visione (matrice K), e non si dispone di oggetti di forma
Esercizi sulle coniche (prof.ssa C. Carrara)
") Esercizi sulle coniche prof.ssa C. Carrara Alcune parti di un esercizio possono ritrovarsi in un altro esercizio, insieme a parti diverse. È un occasione per affrontarle da un altra angolazione.. Determinare
Esercizi sulle coniche prof.ssa C. Carrara Alcune parti di un esercizio possono ritrovarsi in un altro esercizio, insieme a parti diverse. È un occasione per affrontarle da un altra angolazione.. Determinare
Programmazione con Foglio di Calcolo Cenni di Statistica Descrittiva
 Fondamenti di Informatica Ester Zumpano Programmazione con Foglio di Calcolo Cenni di Statistica Descrittiva Lezione 5 Statistica descrittiva La statistica descrittiva mette a disposizione il calcolo di
Fondamenti di Informatica Ester Zumpano Programmazione con Foglio di Calcolo Cenni di Statistica Descrittiva Lezione 5 Statistica descrittiva La statistica descrittiva mette a disposizione il calcolo di
Somma di numeri binari
 Fondamenti di Informatica: Codifica Binaria dell Informazione 1 Somma di numeri binari 0 + 0 = 0 0 + 1 = 1 1 + 0 = 1 1 + 1 = 10 Esempio: 10011011 + 00101011 = 11000110 in base e una base Fondamenti di
Fondamenti di Informatica: Codifica Binaria dell Informazione 1 Somma di numeri binari 0 + 0 = 0 0 + 1 = 1 1 + 0 = 1 1 + 1 = 10 Esempio: 10011011 + 00101011 = 11000110 in base e una base Fondamenti di
Teoria e tecniche dei test. Concetti di base
 Teoria e tecniche dei test Lezione 2 2013/14 ALCUNE NOZIONI STATITICHE DI BASE Concetti di base Campione e popolazione (1) La popolazione è l insieme di individui o oggetti che si vogliono studiare. Questi
Teoria e tecniche dei test Lezione 2 2013/14 ALCUNE NOZIONI STATITICHE DI BASE Concetti di base Campione e popolazione (1) La popolazione è l insieme di individui o oggetti che si vogliono studiare. Questi
Istituto d Istruzione Superiore A. Tilgher Ercolano (Na)
") LO STUDIO DI FUNZIONE Lo studio di funzione è una delle parti più interessanti dell analisi perché permette di utilizzare le numerose conoscenze acquisite nel corso degli anni in un unico elaborato. Se
LO STUDIO DI FUNZIONE Lo studio di funzione è una delle parti più interessanti dell analisi perché permette di utilizzare le numerose conoscenze acquisite nel corso degli anni in un unico elaborato. Se
04 - Numeri Complessi
 Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 04 - Numeri Complessi Anno Accademico 2013/2014 M. Tumminello, V. Lacagnina e
Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 04 - Numeri Complessi Anno Accademico 2013/2014 M. Tumminello, V. Lacagnina e
Esercitazione: La distribuzione NORMALE
 Esercitazione: La distribuzione NORMALE Uno dei più importanti esempi di distribuzione di probabilità continua è dato dalla distribuzione Normale (curva normale o distribuzione Gaussiana); è una delle
Esercitazione: La distribuzione NORMALE Uno dei più importanti esempi di distribuzione di probabilità continua è dato dalla distribuzione Normale (curva normale o distribuzione Gaussiana); è una delle
I.4 Rappresentazione dell informazione
 I.4 Rappresentazione dell informazione Università di Ferrara Dipartimento di Economia e Management Insegnamento di Informatica Ottobre 13, 2015 Argomenti Introduzione 1 Introduzione 2 3 L elaboratore Introduzione
I.4 Rappresentazione dell informazione Università di Ferrara Dipartimento di Economia e Management Insegnamento di Informatica Ottobre 13, 2015 Argomenti Introduzione 1 Introduzione 2 3 L elaboratore Introduzione
Tecniche di enfatizzazione
 Tecniche di enfatizzazione Cosa è l enfatizzazione delle immagini L enfatizzazione o enhancement delle immagini è un insieme di tecniche che vengono utilizzate per migliorare l aspetto delle immagini al
Tecniche di enfatizzazione Cosa è l enfatizzazione delle immagini L enfatizzazione o enhancement delle immagini è un insieme di tecniche che vengono utilizzate per migliorare l aspetto delle immagini al
LA DISTRIBUZIONE NORMALE (Vittorio Colagrande)
") LA DISTRIBUZIONE NORMALE (Vittorio Colagrande) Allo scopo di interpolare un istogramma di un carattere statistico X con una funzione continua (di densità), si può far ricorso nell analisi statistica alla
LA DISTRIBUZIONE NORMALE (Vittorio Colagrande) Allo scopo di interpolare un istogramma di un carattere statistico X con una funzione continua (di densità), si può far ricorso nell analisi statistica alla
Rappresentazione dei numeri interi in un calcolatore
 Corso di Calcolatori Elettronici I Rappresentazione dei numeri interi in un calcolatore Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle
Corso di Calcolatori Elettronici I Rappresentazione dei numeri interi in un calcolatore Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica e delle
Sistemi II. Sistemi II. Elisabetta Colombo
 Corso di Approfondimenti di Matematica per Biotecnologie, Anno Accademico 2011-2012, http://users.mat.unimi.it/users/colombo/programmabio.html 1 2 3 con R.C.+ o 1.10 Rango massimo e determinante con R.C.+
Corso di Approfondimenti di Matematica per Biotecnologie, Anno Accademico 2011-2012, http://users.mat.unimi.it/users/colombo/programmabio.html 1 2 3 con R.C.+ o 1.10 Rango massimo e determinante con R.C.+
1 Ampliamento del piano e coordinate omogenee
 1 Ampliamento del piano e coordinate omogenee Vogliamo dare una idea, senza molte pretese, dei concetti che stanno alla base di alcuni calcoli svolti nella classificazione delle coniche. Supponiamo di
1 Ampliamento del piano e coordinate omogenee Vogliamo dare una idea, senza molte pretese, dei concetti che stanno alla base di alcuni calcoli svolti nella classificazione delle coniche. Supponiamo di
Sistemi ottici come sistemi lineari
 Sistemi ottici come sistemi lineari Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it http://boccignone.di.unimi.it/pmp_2017.html
Sistemi ottici come sistemi lineari Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it http://boccignone.di.unimi.it/pmp_2017.html
Le immagini digitali
 Le immagini digitali immagini raster immagini vettoriali Immagini raster Dette pittoriche o pixel oriented dividono l immagine in una griglia uniforme. Ciascuna cella della griglia ha uguale dimensione.
Le immagini digitali immagini raster immagini vettoriali Immagini raster Dette pittoriche o pixel oriented dividono l immagine in una griglia uniforme. Ciascuna cella della griglia ha uguale dimensione.
Rappresentazione dei Dati
 Parte II I computer hanno una memoria finita. Quindi, l insieme dei numeri interi e reali che si possono rappresentare in un computer è necessariamente finito 2 Codifica Binaria Tutti i dati usati dagli
Parte II I computer hanno una memoria finita. Quindi, l insieme dei numeri interi e reali che si possono rappresentare in un computer è necessariamente finito 2 Codifica Binaria Tutti i dati usati dagli
Il contrasto. La percezione del contrasto. Contrasto e filling-in. Il contrasto simultaneo. Le distribuzioni di luminanza (ii)
") 20 Aprile 2006 Corso di Laurea in Informatica Multimediale Facoltà di Scienze MMFFNN Università di Verona Il contrasto La percezione del contrasto Chiara Della Libera DSNV Università di Verona Sezione
20 Aprile 2006 Corso di Laurea in Informatica Multimediale Facoltà di Scienze MMFFNN Università di Verona Il contrasto La percezione del contrasto Chiara Della Libera DSNV Università di Verona Sezione
Statistica. Matematica con Elementi di Statistica a.a. 2015/16
 Statistica La statistica è la scienza che organizza e analizza dati numerici per fini descrittivi o per permettere di prendere delle decisioni e fare previsioni. Statistica descrittiva: dalla mole di dati
Statistica La statistica è la scienza che organizza e analizza dati numerici per fini descrittivi o per permettere di prendere delle decisioni e fare previsioni. Statistica descrittiva: dalla mole di dati
Rappresentazione dei numeri interi in un calcolatore
 Corso di Calcolatori Elettronici I A.A. 2012-2013 Rappresentazione dei numeri interi in un calcolatore Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica
Corso di Calcolatori Elettronici I A.A. 2012-2013 Rappresentazione dei numeri interi in un calcolatore Prof. Roberto Canonico Università degli Studi di Napoli Federico II Dipartimento di Ingegneria Elettrica
Derivazione numerica. Introduzione al calcolo numerico. Derivazione numerica (II) Derivazione numerica (III)
 Derivazione numerica (III)") Derivazione numerica Introduzione al calcolo numerico Il calcolo della derivata di una funzione in un punto implica un processo al limite che può solo essere approssimato da un calcolatore. Supponiamo
Derivazione numerica Introduzione al calcolo numerico Il calcolo della derivata di una funzione in un punto implica un processo al limite che può solo essere approssimato da un calcolatore. Supponiamo
Introduzione al Metodo agli Elementi Finiti (FEM) (x, y) Γ Tale formulazione viene detta Formulazione forte del problema.
 (x, y) Γ Tale formulazione viene detta Formulazione forte del problema.") Introduzione al Metodo agli Elementi Finiti (FEM) Consideriamo come problema test l equazione di Poisson 2 u x 2 + 2 u = f(x, y) u = f y2 definita su un dominio Ω R 2 avente come frontiera la curva Γ,
Introduzione al Metodo agli Elementi Finiti (FEM) Consideriamo come problema test l equazione di Poisson 2 u x 2 + 2 u = f(x, y) u = f y2 definita su un dominio Ω R 2 avente come frontiera la curva Γ,
MATEMATICA CORSO A II COMPITINO (Tema 1) 5 Aprile 2013
 5 Aprile 2013") MATEMATICA CORSO A II COMPITINO (Tema 1) 5 Aprile 2013 Soluzioni 1. Due sperimentatori hanno rilevato rispettivamente 25 e 5 misure di una certa grandezza lineare e calcolato le medie che sono risultate
MATEMATICA CORSO A II COMPITINO (Tema 1) 5 Aprile 2013 Soluzioni 1. Due sperimentatori hanno rilevato rispettivamente 25 e 5 misure di una certa grandezza lineare e calcolato le medie che sono risultate
Esercizi sulle coniche (prof.ssa C. Carrara)
") Esercizi sulle coniche prof.ssa C. Carrara Alcune parti di un esercizio possono ritrovarsi in un altro esercizio, insieme a parti diverse. È un occasione per affrontarle più volte.. Stabilire il tipo di
Esercizi sulle coniche prof.ssa C. Carrara Alcune parti di un esercizio possono ritrovarsi in un altro esercizio, insieme a parti diverse. È un occasione per affrontarle più volte.. Stabilire il tipo di
Telerilevamento e Modellistica Forestale
 Telerilevamento e Modellistica Forestale Lezione 6 Esplorazione, enfatizzazioni e filtri Dario Papale Contributi: Vern Vanderbilt, TA- Quinn Hart, CCRS Cosa è l enfatizzazione delle immagini L enfatizzazione
Telerilevamento e Modellistica Forestale Lezione 6 Esplorazione, enfatizzazioni e filtri Dario Papale Contributi: Vern Vanderbilt, TA- Quinn Hart, CCRS Cosa è l enfatizzazione delle immagini L enfatizzazione
10 - Applicazioni del calcolo differenziale
 Università degli Studi di Palermo Facoltà di Economia CdS Sviuppo Economico e Cooperazione Internazionale Appunti del corso di Matematica 10 - Applicazioni del calcolo differenziale Anno Accademico 2015/2016
Università degli Studi di Palermo Facoltà di Economia CdS Sviuppo Economico e Cooperazione Internazionale Appunti del corso di Matematica 10 - Applicazioni del calcolo differenziale Anno Accademico 2015/2016
1) Hamming bound, coset, codici equivalenti
 Hamming bound, coset, codici equivalenti") Argomenti della Lezione ) Hamming bound, coset, codici equivalenti 2) Esercizi sui codici lineari a blocchi Osservazione () Per effettuare la decodifica a rivelazione di errore si può seguire una delle
Argomenti della Lezione ) Hamming bound, coset, codici equivalenti 2) Esercizi sui codici lineari a blocchi Osservazione () Per effettuare la decodifica a rivelazione di errore si può seguire una delle
NOTE DI ALGEBRA LINEARE v = a 1 v a n v n, w = b 1 v b n v n
 NOTE DI ALGEBRA LINEARE 2- MM 9 NOVEMBRE 2 Combinazioni lineari e generatori Sia K un campo e V uno spazio vettoriale su K Siano v,, v n vettori in V Definizione Un vettore v V si dice combinazione lineare
NOTE DI ALGEBRA LINEARE 2- MM 9 NOVEMBRE 2 Combinazioni lineari e generatori Sia K un campo e V uno spazio vettoriale su K Siano v,, v n vettori in V Definizione Un vettore v V si dice combinazione lineare
Matematica. Funzioni. Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica
 Matematica Funzioni Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica Le Funzioni e loro caratteristiche Introduzione L analisi di diversi fenomeni della natura o la risoluzione di problemi
Matematica Funzioni Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica Le Funzioni e loro caratteristiche Introduzione L analisi di diversi fenomeni della natura o la risoluzione di problemi
DIPARTIMENTO DI ELETTRONICA E INFORMAZIONE. Numeri in virgola. Marco D. Santambrogio Ver. aggiornata al 10 Novembre 2015
 Numeri in virgola Marco D. Santambrogio marco.santambrogio@polimi.it Ver. aggiornata al 10 Novembre 2015 Numeri in virgola fissa Fino a questo punto abbiamo assunto che Un vettore di bit rappresentasse
Numeri in virgola Marco D. Santambrogio marco.santambrogio@polimi.it Ver. aggiornata al 10 Novembre 2015 Numeri in virgola fissa Fino a questo punto abbiamo assunto che Un vettore di bit rappresentasse
Le Funzioni. Modulo Esponenziali Logaritmiche. Prof.ssa Maddalena Dominijanni
 Le Funzioni Modulo Esponenziali Logaritmiche Definizione di modulo o valore assoluto Se x è un generico numero reale, il suo modulo o valore assoluto è: x = x se x 0 -x se x
Le Funzioni Modulo Esponenziali Logaritmiche Definizione di modulo o valore assoluto Se x è un generico numero reale, il suo modulo o valore assoluto è: x = x se x 0 -x se x
Esercitazione di Analisi Matematica II
 Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
EQUAZIONE DELLA RETTA
 EQUAZIONE DELLA RETTA EQUAZIONE DEGLI ASSI L equazione dell asse x è 0. L equazione dell asse y è 0. EQUAZIONE DELLE RETTE PARALLELE AGLI ASSI L equazione di una retta r parallela all asse x è cioè è uguale
EQUAZIONE DELLA RETTA EQUAZIONE DEGLI ASSI L equazione dell asse x è 0. L equazione dell asse y è 0. EQUAZIONE DELLE RETTE PARALLELE AGLI ASSI L equazione di una retta r parallela all asse x è cioè è uguale
Corso di Visione Artificiale. Features. Samuel Rota Bulò
 Corso di Visione Artificiale Features Samuel Rota Bulò Features Le features (caratteristiche) sono parti di un'immagine che sono: locali: caratteristica locale di un'immagine, significativi: sono interessanti
Corso di Visione Artificiale Features Samuel Rota Bulò Features Le features (caratteristiche) sono parti di un'immagine che sono: locali: caratteristica locale di un'immagine, significativi: sono interessanti
2 2 2 A = Il Det(A) = 2 quindi la conica è non degenere, di rango 3.
 = 2 quindi la conica è non degenere, di rango 3.") Studio delle coniche Ellisse Studiare la conica di equazione 2x 2 + 4xy + y 2 4x 2y + 2 = 0. Per prima cosa dobbiamo classificarla. La matrice associata alla conica è: 2 2 2 A = 2 2 2 Il DetA = 2 quindi
Studio delle coniche Ellisse Studiare la conica di equazione 2x 2 + 4xy + y 2 4x 2y + 2 = 0. Per prima cosa dobbiamo classificarla. La matrice associata alla conica è: 2 2 2 A = 2 2 2 Il DetA = 2 quindi
ORDINAMENTO SESSIONE SUPPLETIVA QUESTIONARIO QUESITO 1
 www.matefilia.it ORDINAMENTO 2003 - SESSIONE SUPPLETIVA QUESTIONARIO QUESITO Tra i rettangoli aventi la stessa area di 6 m 2 trovare quello di perimetro minimo. Indicate con x ed y le misure della base
www.matefilia.it ORDINAMENTO 2003 - SESSIONE SUPPLETIVA QUESTIONARIO QUESITO Tra i rettangoli aventi la stessa area di 6 m 2 trovare quello di perimetro minimo. Indicate con x ed y le misure della base
Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione. Raffaele Cappelli raffaele.cappelli@unibo.it
 Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione Raffaele Cappelli raffaele.cappelli@unibo.it Contenuti Estrazione dei bordi Calcolo del gradiente Operatori di Roberts Operatori
Fondamenti di Elaborazione di Immagini Estrazione dei Bordi e Segmentazione Raffaele Cappelli raffaele.cappelli@unibo.it Contenuti Estrazione dei bordi Calcolo del gradiente Operatori di Roberts Operatori
RAPPRESENTAZIONE DELLE INFORMAZIONI
 RAPPRESENTAZIONE DELLE INFORMAZIONI 1 RAPPRESENTAZIONE DELLE INFORMAZIONI Le informazioni gestite dai sistemi di elaborazione devono essere codificate per poter essere memorizzate, elaborate, scambiate,
RAPPRESENTAZIONE DELLE INFORMAZIONI 1 RAPPRESENTAZIONE DELLE INFORMAZIONI Le informazioni gestite dai sistemi di elaborazione devono essere codificate per poter essere memorizzate, elaborate, scambiate,
Ricordiamo brevemente come possono essere rappresentate le rette nel piano: 1) mediante un'equazione cartesiana. = ( p 1
 mediante un'equazione cartesiana. = ( p 1") Introduzione Nella computer grafica, gli oggetti geometrici sono definiti a partire da un certo numero di elementi di base chiamati primitive grafiche Possono essere punti, rette e segmenti, curve, superfici
Introduzione Nella computer grafica, gli oggetti geometrici sono definiti a partire da un certo numero di elementi di base chiamati primitive grafiche Possono essere punti, rette e segmenti, curve, superfici
Restauro di immagini. Prof. Filippo Stanco. Multimedia
 Restauro di immagini Prof. Filippo Stanco Restauro di immagini Il principale obiettivo delle tecniche di restauro è quello di rendere migliore un immagine cercando di ripristinarne il contenuto informativo
Restauro di immagini Prof. Filippo Stanco Restauro di immagini Il principale obiettivo delle tecniche di restauro è quello di rendere migliore un immagine cercando di ripristinarne il contenuto informativo
0 altimenti 1 soggetto trova lavoroentro 6 mesi}
 Lezione n. 16 (a cura di Peluso Filomena Francesca) Oltre alle normali variabili risposta che presentano una continuità almeno all'interno di un certo intervallo di valori, esistono variabili risposta
Lezione n. 16 (a cura di Peluso Filomena Francesca) Oltre alle normali variabili risposta che presentano una continuità almeno all'interno di un certo intervallo di valori, esistono variabili risposta
FACOLTA DI INGEGNERIA INGEGNERIA INFORMATICA A.A. 2008/2009. Corso VISIONE E PERCEZIONE. Docente. Prof. FIORA PIRRI. Tutor MATIA PIZZOLI
 FACOLTA DI INGEGNERIA INGEGNERIA INFORMATICA A.A. 2008/2009 Corso VISIONE E PERCEZIONE Docente Prof. FIORA PIRRI Tutor MATIA PIZZOLI MAPPA DI DISPARITA Studente Redjan Shabani (1013173) 0 Definizione di
FACOLTA DI INGEGNERIA INGEGNERIA INFORMATICA A.A. 2008/2009 Corso VISIONE E PERCEZIONE Docente Prof. FIORA PIRRI Tutor MATIA PIZZOLI MAPPA DI DISPARITA Studente Redjan Shabani (1013173) 0 Definizione di
ESPONENZIALI E LOGARITMI. chiameremo logaritmica (e si legge il logaritmo in base a di c è uguale a b ).
.") ESPONENZIALI E LOGARITMI Data una espressione del tipo a b = c, che chiameremo notazione esponenziale (e dove a>0), stabiliamo di scriverla anche in un modo diverso: log a c = b che chiameremo logaritmica
ESPONENZIALI E LOGARITMI Data una espressione del tipo a b = c, che chiameremo notazione esponenziale (e dove a>0), stabiliamo di scriverla anche in un modo diverso: log a c = b che chiameremo logaritmica
Corso di laurea magistrale in Informatica Multimedia - Prof. F.Stanco. Segmentazione. A cura di Andrea Tambone
 Corso di laurea magistrale in Informatica Multimedia - Prof. F.Stanco Segmentazione A cura di Andrea Tambone Introduzione Lo scopo della segmentazione è suddividere un immagine in regioni contenenti pixel
Corso di laurea magistrale in Informatica Multimedia - Prof. F.Stanco Segmentazione A cura di Andrea Tambone Introduzione Lo scopo della segmentazione è suddividere un immagine in regioni contenenti pixel
Vettori applicati. Capitolo Richiami teorici. Definizione 1.1 Un sistema di vettori applicati Σ è un insieme
 Capitolo 1 Vettori applicati 1.1 Richiami teorici Definizione 1.1 Un sistema di vettori applicati Σ è un insieme {(P i,v i ), P i E, v i V, i = 1,...,N}, (1.1) dove P i è detto punto di applicazione del
Capitolo 1 Vettori applicati 1.1 Richiami teorici Definizione 1.1 Un sistema di vettori applicati Σ è un insieme {(P i,v i ), P i E, v i V, i = 1,...,N}, (1.1) dove P i è detto punto di applicazione del
Cos è una wavelet? Applicazioni della trasformata wavelet. Analisi multirisoluzione
 Cos è una wavelet? Applicazioni della trasformata wavelet Analisi multirisoluzione Tre tecniche: Piramidi di immagine Trasformata di Haar Codifica per sottobande Il numero totale di pixel nel caso di una
Cos è una wavelet? Applicazioni della trasformata wavelet Analisi multirisoluzione Tre tecniche: Piramidi di immagine Trasformata di Haar Codifica per sottobande Il numero totale di pixel nel caso di una
SISTEMI LINEARI MATRICI E SISTEMI 1
 MATRICI E SISTEMI SISTEMI LINEARI Sistemi lineari e forma matriciale (definizioni e risoluzione). Teorema di Rouché-Capelli. Sistemi lineari parametrici. Esercizio Risolvere il sistema omogeneo la cui
MATRICI E SISTEMI SISTEMI LINEARI Sistemi lineari e forma matriciale (definizioni e risoluzione). Teorema di Rouché-Capelli. Sistemi lineari parametrici. Esercizio Risolvere il sistema omogeneo la cui
Conversione di base. Conversione decimale binario. Si calcolano i resti delle divisioni per due
 Conversione di base Dato N>0 intero convertirlo in base b dividiamo N per b, otteniamo un quoto Q 0 ed un resto R 0 dividiamo Q 0 per b, otteniamo un quoto Q 1 ed un resto R 1 ripetiamo finché Q n < b
Conversione di base Dato N>0 intero convertirlo in base b dividiamo N per b, otteniamo un quoto Q 0 ed un resto R 0 dividiamo Q 0 per b, otteniamo un quoto Q 1 ed un resto R 1 ripetiamo finché Q n < b
UNIVERSITA DEGLI STUDI DI BRESCIA-FACOLTA DI MEDICINA E CHIRURGIA CORSO DI LAUREA IN INFERMIERISTICA SEDE DI DESENZANO dg STATISTICA MEDICA.
 Lezione 4 DISTRIBUZIONE DI FREQUENZA 1 DISTRIBUZIONE DI PROBABILITA Una variabile i cui differenti valori seguono una distribuzione di probabilità si chiama variabile aleatoria. Es:il numero di figli maschi
Lezione 4 DISTRIBUZIONE DI FREQUENZA 1 DISTRIBUZIONE DI PROBABILITA Una variabile i cui differenti valori seguono una distribuzione di probabilità si chiama variabile aleatoria. Es:il numero di figli maschi