Trisections of 4-manifolds
|
|
|
- Matteo Costanzo
- 9 anni fa
- Просмотров:
Транскрипт
1 Università di Pisa Corso di Laurea Magistrale in Matematica A.A. 2015/2016 Trisections of 4-manifolds Candidato Agnese Barbensi Relatore Prof. Paolo Lisca 15 Luglio 2016 Controrelatore Prof. Bruno Martelli
2 1 Introduzione 2 Trisezioni 3 Dimostrazione Teorema di esistenza 4 Il caso con bordo
3 Introduzione Tutte le varietà e le mappe sono lisce e orientate. In topologia è comune studiare le varietà a partire da pezzi semplici: n-varietà: Decomposizione in manici 3-varietà: Decomposizione di Heegaard 4-varietà: Diagrammi di Kirby
4 Introduzione Tutte le varietà e le mappe sono lisce e orientate. In topologia è comune studiare le varietà a partire da pezzi semplici: n-varietà: Decomposizione in manici 3-varietà: Decomposizione di Heegaard 4-varietà: Diagrammi di Kirby

5 Introduzione Tutte le varietà e le mappe sono lisce e orientate. In topologia è comune studiare le varietà a partire da pezzi semplici: n-varietà: Decomposizione in manici 3-varietà: Decomposizione di Heegaard 4-varietà: Diagrammi di Kirby

6 Introduzione Tutte le varietà e le mappe sono lisce e orientate. In topologia è comune studiare le varietà a partire da pezzi semplici: n-varietà: Decomposizione in manici 3-varietà: Decomposizione di Heegaard 4-varietà: Diagrammi di Kirby
7 1 Introduzione 2 Trisezioni 3 Dimostrazione Teorema di esistenza 4 Il caso con bordo
8 Trisezioni Nel 2013 David Gay e Robion Kirby introducono una nuova descrizione per 4-varietà lisce chiuse. Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione.
9 Trisezioni Nel 2013 David Gay e Robion Kirby introducono una nuova descrizione per 4-varietà lisce chiuse. Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione.
10 Trisezioni Nel 2013 David Gay e Robion Kirby introducono una nuova descrizione per 4-varietà lisce chiuse. Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione.
11 Trisezioni Nel 2013 David Gay e Robion Kirby introducono una nuova descrizione per 4-varietà lisce chiuse. Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione.
12 Trisezioni Nel 2013 David Gay e Robion Kirby introducono una nuova descrizione per 4-varietà lisce chiuse. Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione.
13 Trisezioni Nel 2013 David Gay e Robion Kirby introducono una nuova descrizione per 4-varietà lisce chiuse. Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione.
14 Definizione: Dati due interi 0 k g, una (g, k)-trisezione per una 4-varietà X è una decomposizione X = X 1 X 2 X 3 tale che: 1 X i = k (S 1 D 3 ) per ogni i = 1, 2, 3; 2 H i,j := X i X j = g (S 1 D 2 ) per ogni i j; 3 Σ g = X 1 X 2 X 3 è una superficie chiusa di genere g. Chiameremo g il genere della trisezione. Nella tesi utilizziamo la definizione più generale di trisezione unbalanced, in cui i tre handlebody 4-dimensionali X i non hanno necessariamente lo stesso genere.
15 Rappresentazione schematica di una trisezione
16 H i,j H l,i è una decomposizione di Heegaard di genere g per X i = k (S 1 S 2 )

17 H i,j H l,i è una decomposizione di Heegaard di genere g per X i = k (S 1 S 2 )
18 H i,j H l,i è una decomposizione di Heegaard di genere g per X i = k (S 1 S 2 )
19 Osservazione Se una 4-varietà X ammette una (g, k)-trisezione, la sua caratteristica di Eulero è uguale a: χ(x) = 2 + g 3k
20 Diagrammi di trisezione Definizione Un (g, k)-diagramma di trisezione è una 4-upla (Σ g, α, β, γ) tale che ognuna delle triple (Σ g, α, β), (Σ g, β, γ), e (Σ g, γ, α) è un diagramma di Heegaard di genere g per k S 1 S 2. Da un diagramma di trisezione si ottiene una 4-varietà chiusa X(Σ g, α, β, γ)
21 Diagrammi di trisezione Definizione Un (g, k)-diagramma di trisezione è una 4-upla (Σ g, α, β, γ) tale che ognuna delle triple (Σ g, α, β), (Σ g, β, γ), e (Σ g, γ, α) è un diagramma di Heegaard di genere g per k S 1 S 2. Da un diagramma di trisezione si ottiene una 4-varietà chiusa X(Σ g, α, β, γ)

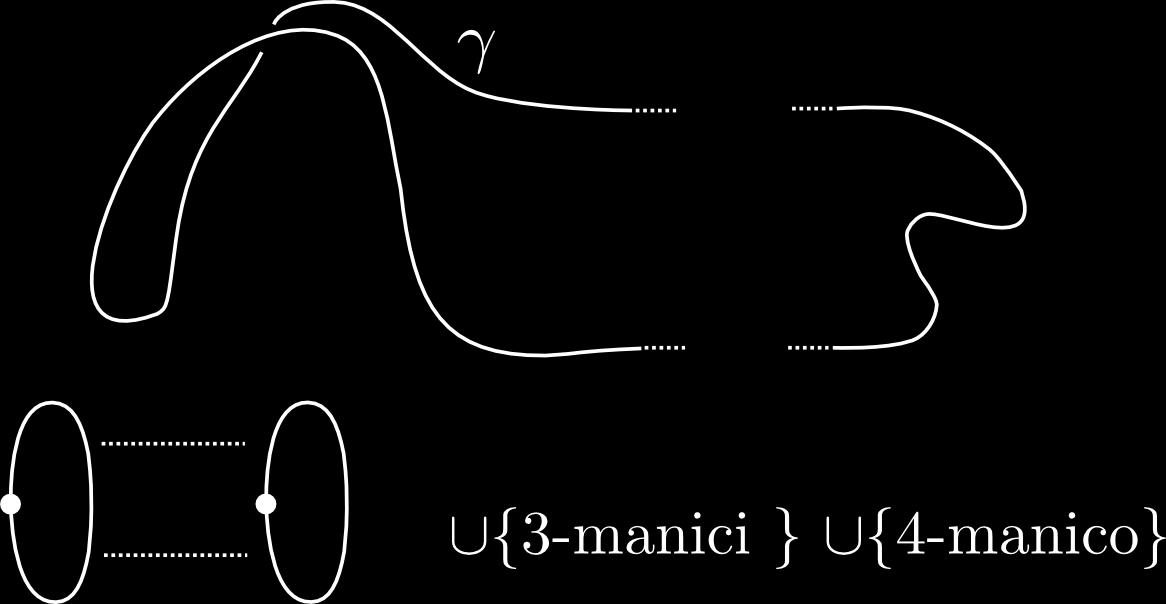
22 Da un diagramma di trisezione si ottiene una 4-varietà chiusa X(Σ g, α, β, γ) attaccando 3g 2-manici 4-dimensionali al prodotto Σ g D 2 lungo le α, β e γ con framing indotti da Σ g e tappando con 3- e 4-manici la varietà ottenuta.
23 Un diagramma di trisezione per S 4. In rosso le curve α, in blu le beta β e in verde le γ.
24 Cancellando le curve γ otteniamo un diagramma di Heegaard di genere 3 per S 1 S 2.
25 Tramite handle slides, ognuno tra (Σ g, α, β), (Σ g, β, γ), e (Σ g, γ, α) può essere trasformato nel diagramma standard di Heegaard di genere g per k S 1 S 2. In figura, un diagramma di trisezione in cui (Σ g, α, β) è reso standard. Solo una delle curve γ è disegnata.
 è reso standard.")
26 Tramite handle slides, ognuno tra (Σ g, α, β), (Σ g, β, γ), e (Σ g, γ, α) può essere trasformato nel diagramma standard di Heegaard di genere g per k S 1 S 2. In figura, un diagramma di trisezione in cui (Σ g, α, β) è reso standard. Solo una delle curve γ è disegnata.

27 Grazie a questa osservazione, possiamo produrre un diagramma di Kirby per X(Σ, α, β, γ).
28
29 Le varietà che ammettono trisezioni con genere g 2 sono state classificate: Teorema g = 1 (Gay Kirby, 2013) Se X ammette una trisezione di genere 1, allora è diffeomorfa a una tra: CP 2, CP 2 e S 1 S 3 ; g = 2 (Meier Zupan, 2014) Se X ammette una trisezione di genere 2, allora è diffeomorfa a S 2 S 2, o somma connessa di CP 2, CP 2 e S 1 S 3.
 Se X ammette una trisezione di genere 2, allora è diffeomorfa a S 2 S 2, o somma connessa di CP 2, CP 2 e S 1 S 3.")
30 Le varietà che ammettono trisezioni con genere g 2 sono state classificate: Teorema g = 1 (Gay Kirby, 2013) Se X ammette una trisezione di genere 1, allora è diffeomorfa a una tra: CP 2, CP 2 e S 1 S 3 ; g = 2 (Meier Zupan, 2014) Se X ammette una trisezione di genere 2, allora è diffeomorfa a S 2 S 2, o somma connessa di CP 2, CP 2 e S 1 S 3.
 Se X ammette una trisezione di genere 2, allora è diffeomorfa a S 2 S 2, o somma connessa di CP 2, CP 2 e S 1 S 3.")
31 Le varietà che ammettono trisezioni con genere g 2 sono state classificate: Teorema g = 1 (Gay Kirby, 2013) Se X ammette una trisezione di genere 1, allora è diffeomorfa a una tra: CP 2, CP 2 e S 1 S 3 ; g = 2 (Meier Zupan, 2014) Se X ammette una trisezione di genere 2, allora è diffeomorfa a S 2 S 2, o somma connessa di CP 2, CP 2 e S 1 S 3.
32 Stabilizzazioni Data una trisezione per X, ne possiamo ottenere infinite altre tramite mosse di stabilizzazione. Definizione La stabilizzazione di una trisezione per X con diagramma (Σ g, α, β, γ) è la trisezione che ammette per diagramma la somma connessa di (Σ g, α, β, γ) con il diagramma di genere 3 rappresentante S 4.
 è la trisezione che ammette per diagramma la somma connessa di (Σ g, α, β, γ)")
33 Stabilizzazioni Data una trisezione per X, ne possiamo ottenere infinite altre tramite mosse di stabilizzazione. Definizione La stabilizzazione di una trisezione per X con diagramma (Σ g, α, β, γ) è la trisezione che ammette per diagramma la somma connessa di (Σ g, α, β, γ) con il diagramma di genere 3 rappresentante S 4.
34 Teorema di esistenza e unicità Teorema, (Gay Kirby, 2014) Ogni 4-varietà liscia, chiusa e orientabile ammette una trisezione; Due trisezioni di una stessa 4-varietà X sono isotope a meno di stabilizzare entrambe un numero finito di volte.
35 Teorema di esistenza e unicità Teorema, (Gay Kirby, 2014) Ogni 4-varietà liscia, chiusa e orientabile ammette una trisezione; Due trisezioni di una stessa 4-varietà X sono isotope a meno di stabilizzare entrambe un numero finito di volte.
36 1 Introduzione 2 Trisezioni 3 Dimostrazione Teorema di esistenza 4 Il caso con bordo
 (t, g t (p)) con g t omotopia generica tra funzioni di Morse g 0, g 1 : M 3 [0, 1].")
37 2-funzione di Morse Una 2-funzione di Morse su una 4-varietà X è una mappa liscia G : X R 2 che localmente può essere pensata come (t, p) (t, g t (p)) con g t omotopia generica tra funzioni di Morse g 0, g 1 : M 3 [0, 1].
, prendiamo G 1 come il prodotto della funzione di Morse standard su i 1 S 1 D 2, con un solo minimo e i 1 punti critici di indice 1.")
38 Dimostrazione del Teorema di esistenza Costruiamo una 2-funzione di Morse G 1 sull unione X 1 di 0- e 1-manici di X. X 1 = i 1 S 1 D 3 = I ( i 1 S 1 D 2 ), prendiamo G 1 come il prodotto della funzione di Morse standard su i 1 S 1 D 2, con un solo minimo e i 1 punti critici di indice 1. In figura, sul lato destro del disco, ritroviamo una decomposizione di Heegaard di genere i 1 per i 1 S 1 S 2, con superficie Σ.

39 Per estendere G 1 ai 2-manici, proiettiamo il link di attaccamento L su Σ, ottenendo una curva immersa con solo incroci per singolarità. Risolviamo ogni incrocio stabilizzando Σ, come in figura, poi attacchiamo i 2-manici. Abbiamo esteso G 1 a una funzione G 2 sull unione X 2 di 0-, 1- e 2-manici.

40 Procediamo sull unione X 3 di 3- e 4-manici come su X 1, producendo una 2-funzione di Morse G 3 su X 3. Le due funzioni danno due funzioni di Morse su X 2 = X3, che connettiamo con un grafico di Cerf.
41 A questo punto, modifico la 2-funzione di Morse definita su tutto X fino a ottenerne una come in figura. Le controimmagini dei settori circolari sono gli handlebodies 4-dimensionali X i, e verificano le condizioni di trisezione.
42 1 Introduzione 2 Trisezioni 3 Dimostrazione Teorema di esistenza 4 Il caso con bordo
.")
43 Il caso con bordo (work in progress, Nick Castro e Juanita Pinzon-Caicedo) Consideriamo Y k = k (S 1 S 2 ), e sia (Σ, H 1, H 2 ) il suo diagramma di Heegaard standard di genere g. Sia P Σ una superficie compatta di genere minore o uguale al genere di Σ \ int(p ). Se chiamiamo N(P ) := I P e Y k (P ) := Y k \ int(i P ), vale Y k = Y k (P ) Id N(P )
 = I P.")
44 Una (g, k)-trisezione per una 4-varietà compatta X è una decomposizione X = X 1 X 2 X 3 come in figura, dove X i = k (S 1 D 3 ), e S, P sono superfici compatte. Ogni arco rosso è il prodotto N(P ) = I P. Ogni coppia di linee verdi rappresenta un Heegaard splitting per Y k (P ) := Y k \ int(i P ).
45 Grazie per l attenzione!
Corso di Laurea in Matematica Geometria 2. Foglio di esercizi n. 2 a.a Soluzioni
 Corso di Laurea in Matematica Geometria 2 Foglio di esercizi n. 2 a.a. 2015-16 Soluzioni Gli esercizi sono presi dal libro di Manetti. Per svolgere questi esercizi, studiare con cura i paragrafi 3.5, 3.6,
Corso di Laurea in Matematica Geometria 2 Foglio di esercizi n. 2 a.a. 2015-16 Soluzioni Gli esercizi sono presi dal libro di Manetti. Per svolgere questi esercizi, studiare con cura i paragrafi 3.5, 3.6,
Vi prego di segnalare ogni inesattezza o errore tipografico a Spazi metrici, spazi topologici, applicazioni continue ed omeomorfismi
 ESERCIZI DI GEOMETRIA 3 Vi prego di segnalare ogni inesattezza o errore tipografico a [email protected] Spazi metrici, spazi topologici, applicazioni continue ed omeomorfismi Esercizio 1. Sia (X, d) uno spazio
ESERCIZI DI GEOMETRIA 3 Vi prego di segnalare ogni inesattezza o errore tipografico a [email protected] Spazi metrici, spazi topologici, applicazioni continue ed omeomorfismi Esercizio 1. Sia (X, d) uno spazio
Geometria I- Diario delle lezioni L. Stoppino, Università dell Insubria, a.a. 2015/2016
 Geometria I- Diario delle lezioni L. Stoppino, Università dell Insubria, a.a. 2015/2016 Martedì 29 settembre (2 ore). Introduzione del corso. Definizione di spazio topologico. Primi esempi: 1) topologia
Geometria I- Diario delle lezioni L. Stoppino, Università dell Insubria, a.a. 2015/2016 Martedì 29 settembre (2 ore). Introduzione del corso. Definizione di spazio topologico. Primi esempi: 1) topologia
Corso di Laurea in Matematica Geometria 2. Foglio di esercizi n. 5 a.a Soluzioni
 Corso di Laurea in Matematica Geometria 2 Foglio di esercizi n. 5 a.a. 2015-16 Soluzioni Gli esercizi sono presi dal libro di Manetti. Per svolgere questi esercizi, studiare con cura i paragrafi 10.1,
Corso di Laurea in Matematica Geometria 2 Foglio di esercizi n. 5 a.a. 2015-16 Soluzioni Gli esercizi sono presi dal libro di Manetti. Per svolgere questi esercizi, studiare con cura i paragrafi 10.1,
Eulero e i poliedri V + F - S = 2. è nota la relazione. V = numero dei vertici. F = numero delle facce. S = numero degli spigoli. perché?
 1 Eulero e i poliedri è nota la relazione V + F - S = 2 V = numero dei vertici F = numero delle facce S = numero degli spigoli perché? per quali poliedri? conseguenze? 2 Perché V + F - S = 2? Vari modi
1 Eulero e i poliedri è nota la relazione V + F - S = 2 V = numero dei vertici F = numero delle facce S = numero degli spigoli perché? per quali poliedri? conseguenze? 2 Perché V + F - S = 2? Vari modi
Corso di Analisi Matematica Limiti di funzioni
 Corso di Analisi Matematica Limiti di funzioni Laurea in Informatica e Comunicazione Digitale A.A. 2013/2014 Università di Bari ICD (Bari) Analisi Matematica 1 / 39 1 Definizione di ite 2 Il calcolo dei
Corso di Analisi Matematica Limiti di funzioni Laurea in Informatica e Comunicazione Digitale A.A. 2013/2014 Università di Bari ICD (Bari) Analisi Matematica 1 / 39 1 Definizione di ite 2 Il calcolo dei
PREPARAZIONE ALLE GARE DI MATEMATICA - CORSO BASE
 Liceo Scientifico Gullace PREPARAZIONE ALLE GARE DI MATEMATICA - CORSO BASE Aritmetica 014-15 1 Lezione 1 DIVISIBILITÀ, PRIMI E FATTORIZZAZIONE Definizioni DIVISIBILITÀ': dati due interi a e b, diciamo
Liceo Scientifico Gullace PREPARAZIONE ALLE GARE DI MATEMATICA - CORSO BASE Aritmetica 014-15 1 Lezione 1 DIVISIBILITÀ, PRIMI E FATTORIZZAZIONE Definizioni DIVISIBILITÀ': dati due interi a e b, diciamo
A.A CORSO DI ALGEBRA 1. PROFF. P. PIAZZA, E. SPINELLI. SOLUZIONE ESERCIZI FOGLIO 5.
 A.A. 2015-2016. CORSO DI ALGEBRA 1. PROFF. P. PIAZZA, E. SPINELLI. SOLUZIONE ESERCIZI FOGLIO 5. Esercizio 5.1. Determinare le ultime tre cifre di n = 13 1625. (Suggerimento. Sfruttare il Teorema di Eulero-Fermat)
A.A. 2015-2016. CORSO DI ALGEBRA 1. PROFF. P. PIAZZA, E. SPINELLI. SOLUZIONE ESERCIZI FOGLIO 5. Esercizio 5.1. Determinare le ultime tre cifre di n = 13 1625. (Suggerimento. Sfruttare il Teorema di Eulero-Fermat)
Il Gioco dell'evasione Fiscale
 Il Gioco dell'evasione Fiscale Laureando Matteo Galliani Relatore Raffaele Mosca Il ruolo della Teoria Dei Giochi Un gioco è una situazione in cui: 1)ogni individuo può scegliere un certo comportamento
Il Gioco dell'evasione Fiscale Laureando Matteo Galliani Relatore Raffaele Mosca Il ruolo della Teoria Dei Giochi Un gioco è una situazione in cui: 1)ogni individuo può scegliere un certo comportamento
Corso di Geometria III - A.A. 2016/17 Esercizi
 Corso di Geometria III - A.A. 216/17 Esercizi (ultimo aggiornamento del file: 2 ottobre 215) Esercizio 1. Calcolare (1 + 2i) 3, ( ) 2 + i 2, (1 + i) n + (1 i) n. 3 2i Esercizio 2. Sia z = x + iy. Determinare
Corso di Geometria III - A.A. 216/17 Esercizi (ultimo aggiornamento del file: 2 ottobre 215) Esercizio 1. Calcolare (1 + 2i) 3, ( ) 2 + i 2, (1 + i) n + (1 i) n. 3 2i Esercizio 2. Sia z = x + iy. Determinare
ESERCIZI SVOLTI SUL CALCOLO INTEGRALE
 ESERCIZI SVOLTI SUL CALCOLO INTEGRALE * Tratti dagli appunti delle lezioni del corso di Matematica Generale Dipartimento di Economia - Università degli Studi di Foggia Prof. Luca Grilli Dott. Michele Bisceglia
ESERCIZI SVOLTI SUL CALCOLO INTEGRALE * Tratti dagli appunti delle lezioni del corso di Matematica Generale Dipartimento di Economia - Università degli Studi di Foggia Prof. Luca Grilli Dott. Michele Bisceglia
LA MATEMATICA DELLE RELAZIONI SOCIALI
 LA MATEMATICA DELLE RELAZIONI SOCIALI ALESSIO TORTI SILVIA LAZZARI FRANCESCA GERACE FLAVIA VICICONTE ABSTRACT. Nell articolo si analizzano, utilizzando la teoria dei grafi, le diverse configurazioni che
LA MATEMATICA DELLE RELAZIONI SOCIALI ALESSIO TORTI SILVIA LAZZARI FRANCESCA GERACE FLAVIA VICICONTE ABSTRACT. Nell articolo si analizzano, utilizzando la teoria dei grafi, le diverse configurazioni che
Grafi e gruppo fondamentale di un grafo
 Grafi e gruppo fondamentale di un grafo Note per il corso di Geometria IV (relative alla parte dei 6 crediti) Milano, 2010-2011, M.Dedò Come trovare un grafo omotopicamente equivalente all'oggetto 3d raffigurato
Grafi e gruppo fondamentale di un grafo Note per il corso di Geometria IV (relative alla parte dei 6 crediti) Milano, 2010-2011, M.Dedò Come trovare un grafo omotopicamente equivalente all'oggetto 3d raffigurato
Precorso di Matematica
 UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTA DI ARCHITETTURA Precorso di Matematica Anna Scaramuzza Anno Accademico 2005-2006 4-10 Ottobre 2005 INDICE 1. ALGEBRA................................. 3 1.1 Equazioni
UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTA DI ARCHITETTURA Precorso di Matematica Anna Scaramuzza Anno Accademico 2005-2006 4-10 Ottobre 2005 INDICE 1. ALGEBRA................................. 3 1.1 Equazioni
LA CARATTERISTICA DI EULERO
 LA CARATTERISTICA DI EULERO Triangolazioni Definizione. Una triangolazione di una superficie compatta S è data da una famiglia finita di suoi sottospazi chiusi {T 1,..., T n } che ricoprano S e da una
LA CARATTERISTICA DI EULERO Triangolazioni Definizione. Una triangolazione di una superficie compatta S è data da una famiglia finita di suoi sottospazi chiusi {T 1,..., T n } che ricoprano S e da una
Il teorema di rappresentazione
 APITOLO 6 Il teorema di rappresentazione. Introduzione Lemma.. Sia una circonferenza e sia A il cerchio racchiuso: riesce 2π i Dimostrazione. Primo caso: z / A = 0 se z / A se z A La funzione = é analitica
APITOLO 6 Il teorema di rappresentazione. Introduzione Lemma.. Sia una circonferenza e sia A il cerchio racchiuso: riesce 2π i Dimostrazione. Primo caso: z / A = 0 se z / A se z A La funzione = é analitica
Complementi di Analisi Matematica Ia. Carlo Bardaro
 Complementi di Analisi Matematica Ia Carlo Bardaro Capitolo 1 Elementi di topologia della retta reale 1.1 Intorni, punti di accumulazione e insiemi chiusi Sia x 0 IR un fissato punto di IR. Chiameremo
Complementi di Analisi Matematica Ia Carlo Bardaro Capitolo 1 Elementi di topologia della retta reale 1.1 Intorni, punti di accumulazione e insiemi chiusi Sia x 0 IR un fissato punto di IR. Chiameremo
0.1 Spazi Euclidei in generale
 0.1. SPAZI EUCLIDEI IN GENERALE 1 0.1 Spazi Euclidei in generale Sia V uno spazio vettoriale definito su R. Diremo, estendendo una definizione data in precedenza, che V è uno spazio vettoriale euclideo
0.1. SPAZI EUCLIDEI IN GENERALE 1 0.1 Spazi Euclidei in generale Sia V uno spazio vettoriale definito su R. Diremo, estendendo una definizione data in precedenza, che V è uno spazio vettoriale euclideo
CURRICULUM VITAE di Paola Cristofori
 CURRICULUM VITAE di Paola Cristofori 15 novembre 1988: laurea con lode in Matematica presso l'università degli Studi di Ferrara, tesi dal titolo "Algoritmi di semplificazione per triangolazioni di varieta`
CURRICULUM VITAE di Paola Cristofori 15 novembre 1988: laurea con lode in Matematica presso l'università degli Studi di Ferrara, tesi dal titolo "Algoritmi di semplificazione per triangolazioni di varieta`
Forme indeterminate e limiti notevoli
 Forme indeterminate e iti notevoli Limiti e continuità Forme indeterminate e iti notevoli Forme indeterminate Teorema di sostituzione Limiti notevoli Altre forme indeterminate 2 2006 Politecnico di Torino
Forme indeterminate e iti notevoli Limiti e continuità Forme indeterminate e iti notevoli Forme indeterminate Teorema di sostituzione Limiti notevoli Altre forme indeterminate 2 2006 Politecnico di Torino
Curve e lunghezza di una curva
 Curve e lunghezza di una curva Definizione 1 Si chiama curva il luogo geometrico dello spazio di equazioni parametriche descritto da punto p, chiuso e limitato. Definizione 2 Si dice che il luogo C è una
Curve e lunghezza di una curva Definizione 1 Si chiama curva il luogo geometrico dello spazio di equazioni parametriche descritto da punto p, chiuso e limitato. Definizione 2 Si dice che il luogo C è una
Esercitazione 6 - Soluzione
 Anno Accademico 28-29 Corso di Algebra Lineare e Calcolo Numerico per Ingegneria Meccanica Esercitazione 6 - Soluzione Immagine, nucleo. Teorema di Rouché-Capelli. Esercizio Sia L : R 3 R 3 l applicazione
Anno Accademico 28-29 Corso di Algebra Lineare e Calcolo Numerico per Ingegneria Meccanica Esercitazione 6 - Soluzione Immagine, nucleo. Teorema di Rouché-Capelli. Esercizio Sia L : R 3 R 3 l applicazione
Università degli Studi di Palermo Facoltà di Economia. Dipartimento di Scienze Economiche, Aziendali e Statistiche. Appunti del corso di Matematica
 Università degli Studi di Palermo Facoltà di Economia Dipartimento di Scienze Economiche, Aziendali e Statistiche Appunti del corso di Matematica 03 - I Numeri Reali Anno Accademico 2015/2016 M. Tumminello,
Università degli Studi di Palermo Facoltà di Economia Dipartimento di Scienze Economiche, Aziendali e Statistiche Appunti del corso di Matematica 03 - I Numeri Reali Anno Accademico 2015/2016 M. Tumminello,
Superfici. V. Tibullo, rev.1, 04/04/2006.
 uperfici. Tibullo, rev.1, 04/04/2006. 1 Integrali di superficie Consideriamo una superficie nello spazio tridimensionale R 3. Il concetto di superficie è noto dalla geometria elementare e non se ne darà
uperfici. Tibullo, rev.1, 04/04/2006. 1 Integrali di superficie Consideriamo una superficie nello spazio tridimensionale R 3. Il concetto di superficie è noto dalla geometria elementare e non se ne darà
1 Primitive e integrali indefiniti
 Analisi Matematica 2 CORSO DI STUDI IN SMID CORSO DI ANALISI MATEMATICA 2 CAPITOLO 2 CALCOLO INTEGRALE Primitive e integrali indefiniti. Definizione di primitiva e di integrale indefinito Data una funzione
Analisi Matematica 2 CORSO DI STUDI IN SMID CORSO DI ANALISI MATEMATICA 2 CAPITOLO 2 CALCOLO INTEGRALE Primitive e integrali indefiniti. Definizione di primitiva e di integrale indefinito Data una funzione
Giuseppe Accascina. Note del corso di Geometria e Algebra
 Giuseppe Accascina Note del corso di Geometria e Algebra Corso di Laurea Specialistica in Ingegneria Gestionale Anno Accademico 26-27 ii Istruzioni per l uso Faremo spesso riferimento a ciò che è stato
Giuseppe Accascina Note del corso di Geometria e Algebra Corso di Laurea Specialistica in Ingegneria Gestionale Anno Accademico 26-27 ii Istruzioni per l uso Faremo spesso riferimento a ciò che è stato
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche
 Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche Annalisa Amadori e Benedetta Pellacci [email protected] [email protected] Università di Napoli Parthenope Contenuti Coniche
Analisi Matematica 1 e Matematica 1 Geometria Analitica: Coniche Annalisa Amadori e Benedetta Pellacci [email protected] [email protected] Università di Napoli Parthenope Contenuti Coniche
F 2. i = F n F n+1. i=1 F 2 1 = 1 = F 1 F 2. Per n 1, supponiamo vero per n, dimostriamo per n + 1. F 2i+1 = F 2n+2. i=0
 1 ESERCIZI 1 Esercizi 1.1 Fibonacci1 Dimostrare che F 2 i = F n F n+1. Dimostrazione. Per induzione su n. Per n = 1 si ha F 2 1 = 1 = F 1 F 2. Per n 1, supponiamo vero per n, dimostriamo per n + 1. n+1
1 ESERCIZI 1 Esercizi 1.1 Fibonacci1 Dimostrare che F 2 i = F n F n+1. Dimostrazione. Per induzione su n. Per n = 1 si ha F 2 1 = 1 = F 1 F 2. Per n 1, supponiamo vero per n, dimostriamo per n + 1. n+1
misura. Adesso, ad un arbitrario punto P dello spazio associamo una terna di numeri reali x
 4. Geometria di R 3. Questo paragrafo è molto simile al paragrafo : tratta infatti delle proprietà geometriche elementari dello spazio R 3. Per assegnare delle coordinate nello spazio, fissiamo innanzitutto
4. Geometria di R 3. Questo paragrafo è molto simile al paragrafo : tratta infatti delle proprietà geometriche elementari dello spazio R 3. Per assegnare delle coordinate nello spazio, fissiamo innanzitutto
CORSO DI LAUREA IN FISICA
 CORSO DI LAUREA IN FISICA ANALISI MATEMATICA I BREVI RICHIAMI DELLA TEORIA DEI LIMITI. Confronto di infinitesimi. Sia A sottoinsieme di R, sia 0 punto di accumulazione di A nella topologia di R quindi
CORSO DI LAUREA IN FISICA ANALISI MATEMATICA I BREVI RICHIAMI DELLA TEORIA DEI LIMITI. Confronto di infinitesimi. Sia A sottoinsieme di R, sia 0 punto di accumulazione di A nella topologia di R quindi
1.4 Geometria analitica
 1.4 Geometria analitica IL PIANO CARTESIANO Per definire un riferimento cartesiano nel piano euclideo prendiamo: Un punto detto origine i Due rette orientate passanti per. ii Due punti e per definire le
1.4 Geometria analitica IL PIANO CARTESIANO Per definire un riferimento cartesiano nel piano euclideo prendiamo: Un punto detto origine i Due rette orientate passanti per. ii Due punti e per definire le
SUPERFICI CONICHE. Rappresentazione di coni e cilindri
 SUPERFICI CONICHE Rappresentazione di coni e cilindri Si definisce CONO la superficie che si ottiene proiettando tutti i punti di una curva, detta DIRETTRICE, da un punto proprio, non appartenente al piano
SUPERFICI CONICHE Rappresentazione di coni e cilindri Si definisce CONO la superficie che si ottiene proiettando tutti i punti di una curva, detta DIRETTRICE, da un punto proprio, non appartenente al piano
La circonferenza e il cerchio
 La circonferenza e il cerchio Considerazioni generali Prof. Angela Gay 14 novembre 2009 pagine 196-200 del libro di testo I luoghi geometrici Un luogo geometrico è l insieme di tutti e soli i punti del
La circonferenza e il cerchio Considerazioni generali Prof. Angela Gay 14 novembre 2009 pagine 196-200 del libro di testo I luoghi geometrici Un luogo geometrico è l insieme di tutti e soli i punti del
Le simmetrie dei poliedri regolari
 Le simmetrie dei poliedri regolari Le isometrie del piano e dello spazio sono state classificate da due illustri matematici. Per quanto riguarda il piano, il teorema di Chasles, del 8, afferma che nel
Le simmetrie dei poliedri regolari Le isometrie del piano e dello spazio sono state classificate da due illustri matematici. Per quanto riguarda il piano, il teorema di Chasles, del 8, afferma che nel
I. Foglio di esercizi su vettori linearmente dipendenti e linearmente indipendenti. , v 2 = α v 1 + β v 2 + γ v 3. α v 1 + β v 2 + γ v 3 = 0. + γ.
 ESERCIZI SVOLTI DI ALGEBRA LINEARE (Sono svolti alcune degli esercizi proposti nei fogli di esercizi su vettori linearmente dipendenti e vettori linearmente indipendenti e su sistemi lineari ) I. Foglio
ESERCIZI SVOLTI DI ALGEBRA LINEARE (Sono svolti alcune degli esercizi proposti nei fogli di esercizi su vettori linearmente dipendenti e vettori linearmente indipendenti e su sistemi lineari ) I. Foglio
ESAME DI STATO DI LICEO SCIENTIFICO Corso Sperimentale P.N.I. Tema di MATEMATICA - 17 giugno 2004
 ESAME DI STATO DI LICEO SCIENTIFICO 00-004 Corso Sperimentale PNI Tema di MATEMATICA - 7 giugno 004 Svolgimento a cura della profssa Sandra Bernecoli e del prof Luigi Tomasi (luigitomasi@liberoit) RISOLUZIONE
ESAME DI STATO DI LICEO SCIENTIFICO 00-004 Corso Sperimentale PNI Tema di MATEMATICA - 7 giugno 004 Svolgimento a cura della profssa Sandra Bernecoli e del prof Luigi Tomasi (luigitomasi@liberoit) RISOLUZIONE
Algebra lineare Geometria 1 11 luglio 2008
 Algebra lineare Geometria 1 11 luglio 2008 Esercizio 1. Si considerino la funzione: { R f : 3 R 3 (α, β, γ) ( 2β α γ, (k 1)β + (1 k)γ α, 3β + (k 2)γ ) dove k è un parametro reale, e il sottospazio U =
Algebra lineare Geometria 1 11 luglio 2008 Esercizio 1. Si considerino la funzione: { R f : 3 R 3 (α, β, γ) ( 2β α γ, (k 1)β + (1 k)γ α, 3β + (k 2)γ ) dove k è un parametro reale, e il sottospazio U =
Anno 1. Criteri di uguaglianza dei triangoli
 Anno 1 Criteri di uguaglianza dei triangoli 1 Introduzione Di fondamentale importanza per la dimostrazione di numerose proprietà dei triangoli sono i criteri di congruenza. Questi si possono utilizzare
Anno 1 Criteri di uguaglianza dei triangoli 1 Introduzione Di fondamentale importanza per la dimostrazione di numerose proprietà dei triangoli sono i criteri di congruenza. Questi si possono utilizzare
1 Formula di Gauss-Green
 Politecnico di Milano. Facoltà di Ingegneria Industriale. Corso di Analisi e Geometria 2. (ocente: Federico Lastaria. Giugno 2011 1 Formula di Gauss-Green Teorema 1.1 (Formula di Gauss-Green nel piano.
Politecnico di Milano. Facoltà di Ingegneria Industriale. Corso di Analisi e Geometria 2. (ocente: Federico Lastaria. Giugno 2011 1 Formula di Gauss-Green Teorema 1.1 (Formula di Gauss-Green nel piano.
Esercizi sulle funzioni di due variabili: parte II
 ANALISI MATEMATICA T- (C.d.L. Ing. per l ambiente e il territorio) A.A.009-00 - Università di Bologna - Prof. G.Cupini Esercizi sulle funzioni di due variabili: parte II (Grazie agli studenti del corso
ANALISI MATEMATICA T- (C.d.L. Ing. per l ambiente e il territorio) A.A.009-00 - Università di Bologna - Prof. G.Cupini Esercizi sulle funzioni di due variabili: parte II (Grazie agli studenti del corso
3. Successioni di insiemi.
 3. Successioni di insiemi. Per evitare incongruenze supponiamo, in questo capitolo, che tutti gli insiemi considerati siano sottoinsiemi di un dato insieme S (l insieme ambiente ). Quando occorrerà considerare
3. Successioni di insiemi. Per evitare incongruenze supponiamo, in questo capitolo, che tutti gli insiemi considerati siano sottoinsiemi di un dato insieme S (l insieme ambiente ). Quando occorrerà considerare
Matematica 1 per Ottici e Orafi. I Numeri Reali
 Matematica 1 per Ottici e Orafi I Numeri Reali Indichiamo con N l insieme dei numeri naturali 1, 2, 3,.... Su N sono definite due operazioni : e + che soddisfano le seguenti proprietá formali : a, b, c
Matematica 1 per Ottici e Orafi I Numeri Reali Indichiamo con N l insieme dei numeri naturali 1, 2, 3,.... Su N sono definite due operazioni : e + che soddisfano le seguenti proprietá formali : a, b, c
IL TEOREMA FONDAMENTALE DELL ARITMETICA: DIMOSTRAZIONE VELOCE.
 IL TEOREMA FONDAMENTALE DELL ARITMETICA: DIMOSTRAZIONE VELOCE. PH. ELLIA Indice Introduzione 1 1. Divisori di un numero. 1 2. Il Teorema Fondamentale dell Aritmetica. 2 3. L insieme dei numeri primi è
IL TEOREMA FONDAMENTALE DELL ARITMETICA: DIMOSTRAZIONE VELOCE. PH. ELLIA Indice Introduzione 1 1. Divisori di un numero. 1 2. Il Teorema Fondamentale dell Aritmetica. 2 3. L insieme dei numeri primi è
Matematica. Funzioni. Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica
 Matematica Funzioni Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica Le Funzioni e loro caratteristiche Introduzione L analisi di diversi fenomeni della natura o la risoluzione di problemi
Matematica Funzioni Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica Le Funzioni e loro caratteristiche Introduzione L analisi di diversi fenomeni della natura o la risoluzione di problemi
Matematica. Corso integrato di. per le scienze naturali ed applicate. Materiale integrativo. Paolo Baiti 1 Lorenzo Freddi 1
 Corso integrato di Matematica per le scienze naturali ed applicate Materiale integrativo Paolo Baiti 1 Lorenzo Freddi 1 1 Dipartimento di Matematica e Informatica, Università di Udine, via delle Scienze
Corso integrato di Matematica per le scienze naturali ed applicate Materiale integrativo Paolo Baiti 1 Lorenzo Freddi 1 1 Dipartimento di Matematica e Informatica, Università di Udine, via delle Scienze
Appunti su Indipendenza Lineare di Vettori
 Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
Appunti su Indipendenza Lineare di Vettori Claudia Fassino a.a. Queste dispense, relative a una parte del corso di Matematica Computazionale (Laurea in Informatica), rappresentano solo un aiuto per lo
ALGEBRA LINEARE PARTE II
 DIEM sez. Matematica Finanziaria Marina Resta Università degli studi di Genova Dicembre 005 Indice PREMESSA INVERSA DI UNA MATRICE DETERMINANTE. DETERMINANTE DI MATRICI ELEMENTARI................. MATRICI
DIEM sez. Matematica Finanziaria Marina Resta Università degli studi di Genova Dicembre 005 Indice PREMESSA INVERSA DI UNA MATRICE DETERMINANTE. DETERMINANTE DI MATRICI ELEMENTARI................. MATRICI
Prodotto scalare e ortogonalità
 Prodotto scalare e ortogonalità 12 Novembre 1 Il prodotto scalare 1.1 Definizione Possiamo estendere la definizione di prodotto scalare, già data per i vettori del piano, ai vettori dello spazio. Siano
Prodotto scalare e ortogonalità 12 Novembre 1 Il prodotto scalare 1.1 Definizione Possiamo estendere la definizione di prodotto scalare, già data per i vettori del piano, ai vettori dello spazio. Siano
Esercizi e complementi di Analisi Complessa - 2
 Esercizi e complementi di Analisi Complessa - 2 Samuele Mongodi - [email protected] 16 maggio 2011 1 Varietà complesse Consideriamo uno spazio topologico X, che sia una varietà reale di dimensione 2, paracompatto
Esercizi e complementi di Analisi Complessa - 2 Samuele Mongodi - [email protected] 16 maggio 2011 1 Varietà complesse Consideriamo uno spazio topologico X, che sia una varietà reale di dimensione 2, paracompatto
LA PERPENDICOLARITA NELLO SPAZIO. Nello spazio si definiscono la perpendicolarità sia tra una retta e un piano sia tra due piani.
 1 LA PERPENDICOLARITA NELLO SPAZIO Nello spazio si definiscono la perpendicolarità sia tra una retta e un piano sia tra due piani. 2.1 La perpendicolarità retta piano Nel piano la perpendicolarità tra
1 LA PERPENDICOLARITA NELLO SPAZIO Nello spazio si definiscono la perpendicolarità sia tra una retta e un piano sia tra due piani. 2.1 La perpendicolarità retta piano Nel piano la perpendicolarità tra
(5 sin x + 4 cos x)dx [9]
![(5 sin x + 4 cos x)dx [9]](/thumbs/53/32581225.jpg "(5 sin x + 4 cos x)dx [9]") FACOLTÀ DI SCIENZE MM. FF. NN. CORSO DI LAUREA IN SCIENZE NATURALI II Modulo di Matematica con elementi di statistica. Esercitazioni A.A. 009.00. Tutor: Mauro Soro, [email protected] Integrali definiti Risolvere
FACOLTÀ DI SCIENZE MM. FF. NN. CORSO DI LAUREA IN SCIENZE NATURALI II Modulo di Matematica con elementi di statistica. Esercitazioni A.A. 009.00. Tutor: Mauro Soro, [email protected] Integrali definiti Risolvere
Appendice A. Temi d esame Topologia. 1. Anno accademico 2011/12.
 Appendice A Temi d esame Topologia 1. Anno accademico 2011/12. 1.1. prima prova parziale. (a) Dare la definizione di omotopia e di nullomotopia per funzioni continue. (b) Dimostrare che due funzioni continue
Appendice A Temi d esame Topologia 1. Anno accademico 2011/12. 1.1. prima prova parziale. (a) Dare la definizione di omotopia e di nullomotopia per funzioni continue. (b) Dimostrare che due funzioni continue
Geometria Superiore Esercizi 1 (da consegnare entro... )
") Geometria Superiore Esercizi 1 (da consegnare entro... ) In questi esercizi analizziamo il concetto di paracompattezza per uno spazio topologico e vediamo come questo implichi l esistenza di partizioni
Geometria Superiore Esercizi 1 (da consegnare entro... ) In questi esercizi analizziamo il concetto di paracompattezza per uno spazio topologico e vediamo come questo implichi l esistenza di partizioni
Teorema di Ceva. Tesina per il corso di Didattica dell algebra e della geometria. Francesco Biccari 23 gennaio 2013
 Teorema di Ceva Tesina per il corso di Didattica dell algebra e della geometria Francesco Biccari 23 gennaio 2013 Il teorema di Ceva è un teorema di geometria euclidea piana dimostrato nel 1678 dall italiano
Teorema di Ceva Tesina per il corso di Didattica dell algebra e della geometria Francesco Biccari 23 gennaio 2013 Il teorema di Ceva è un teorema di geometria euclidea piana dimostrato nel 1678 dall italiano
LIMITI E DERIVATE DI UNA FUNZIONE
 LIMITI E DERIVATE DI UNA FUNZIONE INTRODUZIONE In generale, abbiamo un idea chiara del significato di pendenza quando viene utilizzata in contesti concernenti l esperienza quotidiana, ad esempio quando
LIMITI E DERIVATE DI UNA FUNZIONE INTRODUZIONE In generale, abbiamo un idea chiara del significato di pendenza quando viene utilizzata in contesti concernenti l esperienza quotidiana, ad esempio quando
Anno 2. Equazioni di secondo grado
 Anno Equazioni di secondo grado 1 Introduzione In questa lezione impareremo a utilizzare le equazioni di secondo grado. Al termine di questa lezione sarai in grado di: descrivere le equazioni di secondo
Anno Equazioni di secondo grado 1 Introduzione In questa lezione impareremo a utilizzare le equazioni di secondo grado. Al termine di questa lezione sarai in grado di: descrivere le equazioni di secondo
Funzioni derivabili (V. Casarino)
") Funzioni derivabili (V. Casarino) Esercizi svolti 1) Applicando la definizione di derivata, calcolare la derivata in = 0 delle funzioni: a) 5 b) 3 4 c) + 1 d) sin. ) Scrivere l equazione della retta tangente
Funzioni derivabili (V. Casarino) Esercizi svolti 1) Applicando la definizione di derivata, calcolare la derivata in = 0 delle funzioni: a) 5 b) 3 4 c) + 1 d) sin. ) Scrivere l equazione della retta tangente
Esercizi di Matematica per la prova di ammissione alla Scuola Galileiana /16
 Esercizi di Matematica per la prova di ammissione alla Scuola Galileiana - 015/16 Esercizio 1 Per quali valori n Z \ {0} l espressione è un numero intero positivo? (n + 5)(n + 6) 6n Soluzione. Il problema
Esercizi di Matematica per la prova di ammissione alla Scuola Galileiana - 015/16 Esercizio 1 Per quali valori n Z \ {0} l espressione è un numero intero positivo? (n + 5)(n + 6) 6n Soluzione. Il problema
GLI INSIEMI PROF. WALTER PUGLIESE
 GLI INSIEMI PROF. WALTER PUGLIESE INSIEME DEFINIZIONE UN RAGGRUPPAMENTO DI OGGETTI RAPPRESENTA UN INSIEME IN SENSO MATEMATICO SE ESISTE UN CRITERIO OGGETTIVO CHE PERMETTE DI DECIDERE UNIVOCAMENTE SE UN
GLI INSIEMI PROF. WALTER PUGLIESE INSIEME DEFINIZIONE UN RAGGRUPPAMENTO DI OGGETTI RAPPRESENTA UN INSIEME IN SENSO MATEMATICO SE ESISTE UN CRITERIO OGGETTIVO CHE PERMETTE DI DECIDERE UNIVOCAMENTE SE UN
Didattica della Matematica 1 e Didattica della Matematica e della Fisica - classi A047 e A049 Trasformazioni geometriche
 Didattica della Matematica 1 e Didattica della Matematica e della Fisica - classi A047 e A049 Trasformazioni geometriche anno acc. 2013/2014 Univ. degli Studi di Milano Cristina Turrini (Univ. degli Studi
Didattica della Matematica 1 e Didattica della Matematica e della Fisica - classi A047 e A049 Trasformazioni geometriche anno acc. 2013/2014 Univ. degli Studi di Milano Cristina Turrini (Univ. degli Studi
Anno 4 Matrice inversa
 Anno 4 Matrice inversa 1 Introduzione In questa lezione parleremo della matrice inversa di una matrice quadrata: definizione metodo per individuarla Al termine della lezione sarai in grado di: descrivere
Anno 4 Matrice inversa 1 Introduzione In questa lezione parleremo della matrice inversa di una matrice quadrata: definizione metodo per individuarla Al termine della lezione sarai in grado di: descrivere
I punti di inizio e di fine della spezzata prendono il nome di estremi della spezzata. lati
 I Poligoni Spezzata C A cosa vi fa pensare una spezzata? Qualcosa che si rompe in tanti pezzi A me dà l idea di un spaghetto che si rompe Se noi rompiamo uno spaghetto e manteniamo uniti i vari pezzi per
I Poligoni Spezzata C A cosa vi fa pensare una spezzata? Qualcosa che si rompe in tanti pezzi A me dà l idea di un spaghetto che si rompe Se noi rompiamo uno spaghetto e manteniamo uniti i vari pezzi per
CORSO DI ANALISI MATEMATICA 2 SOLUZIONI ESERCIZI PROPOSTI 18/03/2013
 CORSO DI ANALISI MATEMATICA SOLUZIONI ESERCIZI PROPOSTI 8/03/03 D.BARTOLUCCI, D.GUIDO. La continuità uniforme I ESERCIZIO: Dimostrare che la funzione f(x) = x 3, x A = (, ] non è uniformemente continua
CORSO DI ANALISI MATEMATICA SOLUZIONI ESERCIZI PROPOSTI 8/03/03 D.BARTOLUCCI, D.GUIDO. La continuità uniforme I ESERCIZIO: Dimostrare che la funzione f(x) = x 3, x A = (, ] non è uniformemente continua
LEZIONE 4. { x + y + z = 1 x y + 2z = 3
 LEZIONE 4 4.. Operazioni elementari di riga. Abbiamo visto, nella precedente lezione, quanto sia semplice risolvere sistemi di equazioni lineari aventi matrice incompleta fortemente ridotta per righe.
LEZIONE 4 4.. Operazioni elementari di riga. Abbiamo visto, nella precedente lezione, quanto sia semplice risolvere sistemi di equazioni lineari aventi matrice incompleta fortemente ridotta per righe.
8. Completamento di uno spazio di misura.
 8. Completamento di uno spazio di misura. 8.1. Spazi di misura. Spazi di misura completi. Definizione 8.1.1. (Spazio misurabile). Si chiama spazio misurabile ogni coppia ordinata (Ω, A), dove Ω è un insieme
8. Completamento di uno spazio di misura. 8.1. Spazi di misura. Spazi di misura completi. Definizione 8.1.1. (Spazio misurabile). Si chiama spazio misurabile ogni coppia ordinata (Ω, A), dove Ω è un insieme
Insiemi, Numeri, Terminologia. Prof. Simone Sbaraglia
 Insiemi, Numeri, Terminologia Prof. Simone Sbaraglia Corso Rapido di Logica Matematica La logica formale definisce le regole cui deve obbedire qualsiasi teoria deduttiva. Una proposizione e` una affermazione
Insiemi, Numeri, Terminologia Prof. Simone Sbaraglia Corso Rapido di Logica Matematica La logica formale definisce le regole cui deve obbedire qualsiasi teoria deduttiva. Una proposizione e` una affermazione
2x 5y +4z = 3 x 2y + z =5 x 4y +6z = A =
 Esercizio 1. Risolvere il sistema lineare 2x 5y +4z = x 2y + z =5 x 4y +6z =10 (1) Soluz. La matrice dei coefficienti è 1 4 6, calcoliamone il rango. Il determinante di A è (applico la regola di Sarrus):
Esercizio 1. Risolvere il sistema lineare 2x 5y +4z = x 2y + z =5 x 4y +6z =10 (1) Soluz. La matrice dei coefficienti è 1 4 6, calcoliamone il rango. Il determinante di A è (applico la regola di Sarrus):
Capitolo IV SPAZI VETTORIALI EUCLIDEI
 Capitolo IV SPAZI VETTORIALI EUCLIDEI È ben noto che in VO 3 si possono considerare strutture più ricche di quella di spazio vettoriale; si pensi in particolare all operazioni di prodotto scalare di vettori.
Capitolo IV SPAZI VETTORIALI EUCLIDEI È ben noto che in VO 3 si possono considerare strutture più ricche di quella di spazio vettoriale; si pensi in particolare all operazioni di prodotto scalare di vettori.
Rilevazione degli apprendimenti
 Rilevazione degli apprendimenti Anno Scolastico 00-0 PROVA DI MATEMATICA Scuola secondaria di II grado Classe... Studente... Simulazioni di prove costruite secondo il Quadro di riferimento Invalsi pubblicato
Rilevazione degli apprendimenti Anno Scolastico 00-0 PROVA DI MATEMATICA Scuola secondaria di II grado Classe... Studente... Simulazioni di prove costruite secondo il Quadro di riferimento Invalsi pubblicato
Si consideri il sistema a coefficienti reali di m equazioni lineari in n incognite
 3 Sistemi lineari 3 Generalità Si consideri il sistema a coefficienti reali di m equazioni lineari in n incognite ovvero, in forma matriciale, a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n x
3 Sistemi lineari 3 Generalità Si consideri il sistema a coefficienti reali di m equazioni lineari in n incognite ovvero, in forma matriciale, a x + a 2 x 2 + + a n x n = b a 2 x + a 22 x 2 + + a 2n x
MATEMATICA LA CIRCONFERENZA GSCATULLO
 MATEMATICA LA CIRCONFERENZA GSCATULLO La Circonferenza La circonferenza e la sua equazione Introduzione e definizione La circonferenza è una conica, ovvero quella figura ottenuta tagliando un cono con
MATEMATICA LA CIRCONFERENZA GSCATULLO La Circonferenza La circonferenza e la sua equazione Introduzione e definizione La circonferenza è una conica, ovvero quella figura ottenuta tagliando un cono con
Calcolo integrale. Regole di integrazione
 Calcolo integrale Linearità dell integrale Integrazione per parti Integrazione per sostituzione Integrazione di funzioni razionali 2 2006 Politecnico di Torino Proprietà Siano e funzioni integrabili su
Calcolo integrale Linearità dell integrale Integrazione per parti Integrazione per sostituzione Integrazione di funzioni razionali 2 2006 Politecnico di Torino Proprietà Siano e funzioni integrabili su
2. Calcola, enunciando, descrivendo e applicando la definizione, la derivata della 2
 Domande di matematica per l esame di stato per il liceo classico Analisi matematica 1. Spiega quando una funzione è un infinitesimo e quando è un infinito per x che tende a x 0. Quali sono i possibili
Domande di matematica per l esame di stato per il liceo classico Analisi matematica 1. Spiega quando una funzione è un infinitesimo e quando è un infinito per x che tende a x 0. Quali sono i possibili
GEOMETRIA B Esercizi
 GEOMETRIA B 2016-17 BARBARA NELLI A.A. 2016-17 Alcuni degli esercizi sono presi dal libro DC [1]. 1. Esercizi Esercizio 1.1. Sia α : I R 3 una curva parametrizzata e sia v R 3 un vettore fissato. Assumiamo
GEOMETRIA B 2016-17 BARBARA NELLI A.A. 2016-17 Alcuni degli esercizi sono presi dal libro DC [1]. 1. Esercizi Esercizio 1.1. Sia α : I R 3 una curva parametrizzata e sia v R 3 un vettore fissato. Assumiamo
Presentazione di gruppi
 Presentazione di gruppi Sia G un gruppo e X un suo sottoinsieme non vuoto, indichiamo con Gp(X) = {x ɛ 1 1 x ɛ 2 2... x ɛ n n x i X, ɛ i = ±1} dove gli elementi di questo insieme sono da intendersi come
Presentazione di gruppi Sia G un gruppo e X un suo sottoinsieme non vuoto, indichiamo con Gp(X) = {x ɛ 1 1 x ɛ 2 2... x ɛ n n x i X, ɛ i = ±1} dove gli elementi di questo insieme sono da intendersi come
Soluzione dei sistemi lineari con metodo grafico classe 2H
 Soluzione dei sistemi lineari con metodo grafico classe H (con esempi di utilizzo del software open source multipiattaforma Geogebra e calcolatrice grafica Texas Instruments TI-89) Metodo grafico Il metodo
Soluzione dei sistemi lineari con metodo grafico classe H (con esempi di utilizzo del software open source multipiattaforma Geogebra e calcolatrice grafica Texas Instruments TI-89) Metodo grafico Il metodo
Circonferenze del piano
 Circonferenze del piano 1 novembre 1 Circonferenze del piano 1.1 Definizione Una circonferenza è il luogo dei punti equidistanti da un punto fisso, detto centro. La distanza di un qualunque punto della
Circonferenze del piano 1 novembre 1 Circonferenze del piano 1.1 Definizione Una circonferenza è il luogo dei punti equidistanti da un punto fisso, detto centro. La distanza di un qualunque punto della
DISPENSE SU TEORIA DEGLI INSIEMI E NUMERI
 FACOLTA' DI ECONOMIA UNIVERSITA DELLA CALABRIA Corso di Modelli Matematici per l Azienda a.a. 2011-2012 DISPENSE SU TEORIA DEGLI INSIEMI E NUMERI Prof. Fabio Lamantia INSIEMI INSIEME= gruppo di oggetti
FACOLTA' DI ECONOMIA UNIVERSITA DELLA CALABRIA Corso di Modelli Matematici per l Azienda a.a. 2011-2012 DISPENSE SU TEORIA DEGLI INSIEMI E NUMERI Prof. Fabio Lamantia INSIEMI INSIEME= gruppo di oggetti
R. Capone Analisi Matematica Integrali multipli
 Integrali multipli Consideriamo, inizialmente il caso degli integrali doppi. Il concetto di integrale doppio è l estensione della definizione di integrale per una funzione reale di una variabile reale
Integrali multipli Consideriamo, inizialmente il caso degli integrali doppi. Il concetto di integrale doppio è l estensione della definizione di integrale per una funzione reale di una variabile reale
1 La lunghezza della circonferenza
 1 La lunghezza della circonferenza Ricordiamo che per misurare una grandezza bisogna scegliere un unità di misura e stabilire quante volte quest ultima è contenuta nella prima. Nel caso della circonferenza
1 La lunghezza della circonferenza Ricordiamo che per misurare una grandezza bisogna scegliere un unità di misura e stabilire quante volte quest ultima è contenuta nella prima. Nel caso della circonferenza
Esercizi sulle superfici - aprile 2009
 Esercizi sulle superfici - aprile 009 Ingegneria meccanica 008/009 Esercizio 1. Scrivere l equazione della superficie ottenuta ruotando la retta s : x = y, y =z attorno alla retta r : x = y, x =3z. Soluzione:
Esercizi sulle superfici - aprile 009 Ingegneria meccanica 008/009 Esercizio 1. Scrivere l equazione della superficie ottenuta ruotando la retta s : x = y, y =z attorno alla retta r : x = y, x =3z. Soluzione:
si tratta del test del chi-quadro di adattamento e di quello di indipendenza. 1 l ipotesi che la popolazione segua una legge fissata;
 di : dado : normale Finora abbiamo visto test d ipotesi per testare ipotesi differenti, ma tutte concernenti il valore atteso di una o due popolazioni. In questo capitolo vediamo come testare 1 l ipotesi
di : dado : normale Finora abbiamo visto test d ipotesi per testare ipotesi differenti, ma tutte concernenti il valore atteso di una o due popolazioni. In questo capitolo vediamo come testare 1 l ipotesi
Spinta delle terre Teoria di Coulomb o del prisma di massima spinta
 Spinta delle terre Teoria di Coulomb o del prisma di massima spinta La valutazione in intensità, verso, punto di applicazione della spinta del terreno su un muro di sostegno presenta tutt ora difficoltà
Spinta delle terre Teoria di Coulomb o del prisma di massima spinta La valutazione in intensità, verso, punto di applicazione della spinta del terreno su un muro di sostegno presenta tutt ora difficoltà