Agenti intelligenti. Maria Simi a.a. 2014/2015
|
|
|
- Annunziata Marinelli
- 8 anni fa
- Visualizzazioni
Transcript
1 Agenti intelligenti Maria Simi a.a. 2014/2015

2 Riassunto Intelligenza come capacità diverse Capacità di simulare il comportamento umano? Capacità di ragionamento logico/matematico? Intelligenza come competenza da esperto? Intelligenza come buon senso (senso comune)? Capacità di interagire con un ambiente? Capacità sociali, di comunicazione e coordinamento? Capacità di comprendere e provare emozioni? Capacità di immagazzinare esperienza?

3 Agenti intelligenti L approccio moderno all IA: costruzione di agenti intelligenti La visione ad agenti ci offre un quadro di riferimento e una prospettiva diversa all analisi dei sistemi software

4 Caratteristiche degli agenti Gli agenti sono situati ricevono percezioni da un ambiente agiscono sull ambiente mediante azioni Gli agenti hanno abilità sociale sono capaci di comunicare, collaborare, difendersi da altri agenti Gli agenti hanno credenze, obiettivi, intenzioni... Gli agenti sono embodied: hanno un corpo e provano emozioni

5 Sommario (cap. 2, AIMA) Agenti razionali Proprietà degli ambienti La struttura degli agenti Agenti reattivi semplici Agenti basati su modello Agenti con obiettivo Agenti con funzione di utilità Agenti che apprendono

6 Agenti secondo AIMA Ciclo percezione- azione
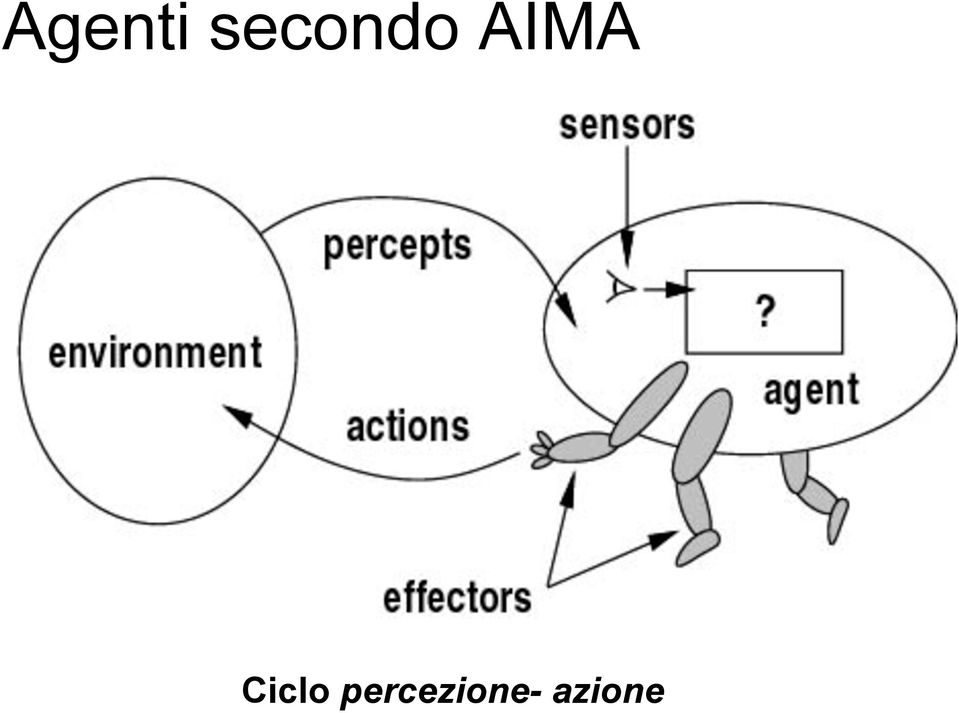
7 Percezioni e azioni Percezione: input da sensori Sequenza percettiva: storia completa delle percezioni La scelta dell azione è funzione unicamente della sequenza percettiva Funzione agente: definisce l azione da compiere per ogni seguenza percettiva. Implementata da un programma agente

8 Agente e ambiente

9 Agente finanziario (trading agent) Rates News Stock market Bonds Commo -dities Trades

10 Agente robotico Camera Microfono Touch Motori Voce

11 Game agent Mosse avversario AVVERSARIO Mosse agente

12 Agente diagnostico in medicina Sintomi Analisi PATIENT Diagnosi DOCTOR

13 IA e web: motore di ricerca Crawling agent Web pages User queries WEB Search results

14 Agenti razionali Un agente razionale interagisce con il suo ambiente in maniera efficace (fa la cosa giusta ). Serve un criterio di valutazione oggettivo dell effetto delle azioni dell agente (della sequenza di stati dell ambiente)

15 Valutazione della prestazione Misura di prestazione Esterna (come vogliamo che il mondo evolva?) Scelta dal progettista a seconda del problema considerando una evoluzione desiderabile del mondo Valutazione su ambienti diversi

16 Agente razionale: definizione La razionalità è relativa a: la misura di prestazioni le conoscenze pregressa dell ambiente le percezioni presenti e passate le capacità dell agente Agente razionale: per ogni sequenza di percezioni compie l azione che massimizza il valore atteso della misura delle prestazioni, considerando le sue percezioni passate e la sua conoscenza pregressa.

17 Razionalità non onniscienza Non si pretendono perfezione e capacità predittive, basta massimizzare il risultato atteso Ma potrebbe essere necessarie azioni di acquisizione di informazioni o esplorative Razionalità non onnipotenza Le capacità dell'agente possono essere limitate

18 Razionalità e apprendimento Raramente tutta la conoscenza sull ambiente può essere fornita a priori. L agente razionale deve essere in grado di modificare il proprio comportamento con l esperienza (le percezioni passate).

19 Agenti autonomi Agente autonomo: un agente è autonomo nella misura in cui il suo comportamento dipende dalla sua esperienza. Un agente il cui comportamento fosse determinato solo dalla sua conoscenza built-in, sarebbe non autonomo e poco flessibile

20 Ambienti Definire un problema per un agente significa caratterizzare l ambiente in cui l agente opera (ambiente operativo). Agente razionale=soluzione Descrizione PEAS dei problemi P erformance prestazione E nvironment ambiente A ctuators attuatori S ensors sensori

21 Agente guidatore di taxi Prestazione Ambiente Attuatori Sensori Arrivare alla destinazione, sicuro, veloce, ligio alla legge, viaggio confortevole, minimo consumo di benzina, profitti massimi Strada, altri veicoli, pedoni, clienti Sterzo, acceleratore, freni, frecce, clacson, schermo di interfaccia o sintesi vocale Telecamere, sensori a infrarossi e sonar, tachimetro, GPS, contachilometri, acelerometro, sensori sullo stato del motore, tastiera o microfono
22 Formulazione PEAS dei problemi Problema P E A S Diagnosi medica Diagnosi corretta, cura del paziente Robot selezionatore % delle parti correttamente classificate Pazienti, ospedale Nastro trasportatore Domande, suggerimenti test, diagnosi Raccogliere le parti e metterle nei cestini Sintomi, Test clinici, risposte paziente Immagini (pixel di varia intensità) Giocatore di calcio Fare più goal dell avversario Altri giocatori, campo di calcio, porte Dare calci al pallone, correre Locazione pallone altri giocatori, porte Bibliotecario Information broker Insegnante di inglese
23 Proprietà dell ambiente-problema Completamente/parzialmente osservabile Agente singolo/multi-agente Deterministico/stocastico/non deterministico Episodico/sequenziale Statico/dinamico Discreto/continuo
24 Osservabilità Ambiente completamente osservabile L apparato percettivo è in grado di dare una conoscenza completa dell ambiente o almeno tutto quello che serve a decidere l azione Non c è bisogno di mantenere uno stato del mondo Ambiente parzialmente osservabile Sono presenti limiti o inaccuratezze dell apparato sensoriale.
25 Ambiente singolo/multiagente Distinzione agente/non agente Il mondo può anche cambiare per eventi, non necessariamente per azioni di agenti. Ambiente multi-agente competitivo Comportamento randomizzato Ambiente multi-agente cooperativo (o benigno) Stesso obiettivo Comunicazione
26 Predicibilità Deterministico Se lo stato successivo è completamente determinato dallo stato corrente e dall azione. Esempio: scacchi Stocastico Esistono elementi di incertezza con associata probabilità. Esempi: guida, tiro in porta Non deterministico Se gli stati possibili sono equiprobabili
27 Episodico/sequenziale Episodico L esperienza dell agente è divisa in episodi atomici indipendenti. In ambienti episodici non c è bisogno di pianificare. Sequenziale Ogni decisione influenza le successive
28 Statico/dinamico Statico il mondo non cambia mentre l agente decide l azione Dinamico tardare equivale a non agire Semi-dinamico L ambiente non cambia ma la valutazione dell agente sì. Esempio: Scacchi con timer.
29 Discreto/continuo Possono assumere valori discreti o continui lo stato: solo un numero finito di stati il tempo le percezioni le azioni La guida del taxi è un problema con stato e tempo continui
30 Noto/ignoto Distinzione riferita allo stato di conoscenza dell agente L agente conosce l ambiente oppure deve compiere azioni esplorative? Noto diverso da osservabile Ambienti reali: parzialmente osservabili, stocastici, sequenziali, dinamici, continui, multi-agente, ignoti
31 Tipologie di ambiente Osservabile/ no Deterministico/ stocastico Episodico/ sequenziale Statico/ dinamico Discreto/ continuo Mono/multiagente? Gioco 15 Osservabile Deterministico Sequenziale Statico Discreto Mono Briscola Scacchi Scacchi con tempo limitato Sudoku Taxi driver
32 Simulatore di ambienti Uno strumento software che si occupa di: generare stimoli per gli agenti raccogliere le azioni in risposta aggiornare lo stato dell ambiente [attivare altri processi che influenzano l ambiente] valutare le prestazioni degli agenti
33 Simulatore function Run-Eval-Environment (state, Update-Fn, agents, Performance-Fn) returns scores local variables: scores (a vector of size = #agents, all 0) repeat for each agent in agents do Percept[agent] Get-Percept(agent, state) end for each agent in agents do Action[agent] Program[agent](Percept[agent]) end state Update-Fn(actions, agents, state) scores Performance-Fn(scores, agents, state) until termination(state) return scores
34 Struttura di un agente Agente = Architettura + Programma Ag: P Az percezioni azioni Il programma dell agente implementa la funzione Ag
35 Programma agente function Skeleton-Agent (percept) returns action static: memory, the agent s memory of the world memory UpdateMemory(memory, percept) action Choose-Best-Action(memory) memory UpdateMemory(memory, action) return action
36 Agente basato su tabella La scelta dell azione è un accesso a una tabella che associa un azione ad ogni possibile sequenza di percezioni. Problemi: 1. Per giocare a scacchi tabella con righe! 2. Difficile da costruire 3. Nessuna autonomia 4. Di difficile aggiornamento, apprendimento complesso.
37 Agenti reattivi semplici Agiscono per riflesso e sono dotati di regole condizione azione
38 Agenti reattivi - programma function Agente-Reattivo-Semplice (percezione) returns azione persistent: regole, un insieme di regole condizione-azione stato Interpreta-Input(percezione) regola Regola-Corrispondente(stato, regole) azione regola.azione return azione
39 Agenti basati su modello
40 Agenti basati su modello function Agente-Basato-su-Modello (percezione) returns azione persistent: stato, una descrizione dello stato corrente modello, conoscenza del mondo regole, un insieme di regole condizione-azione azione, l azione più recente stato Aggiorna-Stato(stato, azione, percezione, modello) regola Regola-Corrispondente(stato, regole) azione regola.azione return azione
41 Agenti con obiettivo
42 Agenti con obiettivo Sono guidati da un obiettivo nella scelta dell azione A volte l azione migliore dipende da qual è l'obiettivo da raggiungere (es. da che parte devo girare?). Devono pianificare una sequenza di azioni per raggiungere l obiettivo. Meno efficienti ma più flessibili di un agente reattivo
43 Agenti con valutazione di utilità
44 Agenti con valutazione di utilità Obiettivi alternativi l agente deve decidere verso quali di questi muoversi. necessaria una funzione di utilità (che associa ad uno stato obiettivo un numero reale). Obiettivi più facilmente raggiungibili di altri la funzione di utilità tiene conto anche della probabilità di successo: utilità attesa
45 Agenti che apprendono
46 Agenti che apprendono 1. Componente di apprendimento Produce cambiamenti al programma agente 2. Elemento esecutivo Il programma agente 3. Elemento critico Osserva e dà feedback sul comportamento 4. Generatore di problemi Suggerisce nuove situazioni da esplorare
47 Tipi di rappresentazione B C B C (a) Atomic (b) Factored (b) Structured Rappresentazione atomica Rappresentazione fattorizzata Rappresentazione strutturata
48 Conclusioni Agenti e programmi agente Misure di prestazioni Classificazione degli ambienti operativi Diverse architetture di complessità crescente per i programmi agente Tutti gli agenti possono migliorarsi con l apprendimento
IA debole vs IA forte. Agenti intelligenti. Agenti intelligenti: la prospettiva di AIMA. In questa lezione (cap 2 AIMA) Percezioni e azioni
 Percezioni e azioni") IA debole vs IA forte Agenti intelligenti Maria Simi a.a. 2011/2012 IA debole: le macchine posso agire in maniera intelligente? (come se lo fossero) IA forte: le macchine possono veramente pensare? (come
IA debole vs IA forte Agenti intelligenti Maria Simi a.a. 2011/2012 IA debole: le macchine posso agire in maniera intelligente? (come se lo fossero) IA forte: le macchine possono veramente pensare? (come
Riassunto. Agenti intelligenti. Agenti intelligenti. Agenti secondo AIMA. Sommario (cap. 2, AIMA) Caratteristiche degli agenti
 Caratteristiche degli agenti") Riassunto Agenti intelligenti Maria Simi a.a. 2013/2014 Intelligenza come capacità diverse Capacità di simulare il comportamento umano? Capacità di ragionamento logico/matematico? Intelligenza come competenza
Riassunto Agenti intelligenti Maria Simi a.a. 2013/2014 Intelligenza come capacità diverse Capacità di simulare il comportamento umano? Capacità di ragionamento logico/matematico? Intelligenza come competenza
Agenti intelligenti. Agenti intelligenti. Agenti intelligenti: la prospettiva di AIMA. Percezioni e azioni. Sommario (cap.
 Agenti intelligenti Agenti intelligenti Maria Simi a.a. 2012/2013 Intelligenza come capacità diverse L approccio moderno all IA: costruzione di agenti intelligenti La visione ad agenti ci offre un quadro
Agenti intelligenti Agenti intelligenti Maria Simi a.a. 2012/2013 Intelligenza come capacità diverse L approccio moderno all IA: costruzione di agenti intelligenti La visione ad agenti ci offre un quadro
Agenti intelligenti. Alessio Micheli a.a. 2015/2016. Credits: Maria Simi Russell-Norvig
 Agenti intelligenti Alessio Micheli a.a. 2015/2016 Credits: Maria Simi Russell-Norvig Riassunto (da lezione 1) Intelligenza come capacità diverse Capacità di simulare il comportamento umano? Capacità di
Agenti intelligenti Alessio Micheli a.a. 2015/2016 Credits: Maria Simi Russell-Norvig Riassunto (da lezione 1) Intelligenza come capacità diverse Capacità di simulare il comportamento umano? Capacità di
Agente Artificiale Intelligente (razionale)
") Agente Artificiale Intelligente (razionale) Percezioni attraverso sensori AMBIENTE AGENTE Azioni attraverso attuatori (bracci meccanici, ruote, ecc.) Quando un Agente Artificiale è Razionale? Quando fa
Agente Artificiale Intelligente (razionale) Percezioni attraverso sensori AMBIENTE AGENTE Azioni attraverso attuatori (bracci meccanici, ruote, ecc.) Quando un Agente Artificiale è Razionale? Quando fa
Automazione Industriale (scheduling+mms) scheduling+mms. adacher@dia.uniroma3.it
 scheduling+mms. adacher@dia.uniroma3.it") Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Automazione Industriale (scheduling+mms) scheduling+mms adacher@dia.uniroma3.it Introduzione Sistemi e Modelli Lo studio e l analisi di sistemi tramite una rappresentazione astratta o una sua formalizzazione
Ambienti più realistici. Ricerca online. Azioni non deterministiche L aspirapolvere imprevedibile. Soluzioni più complesse. Alberi di ricerca AND-OR
 Ambienti più realistici Ricerca online Maria Simi a.a. 2011/2012 Gli agenti risolutori di problemi classici assumono: Ambienti completamente osservabili e deterministici il piano generato può essere generato
Ambienti più realistici Ricerca online Maria Simi a.a. 2011/2012 Gli agenti risolutori di problemi classici assumono: Ambienti completamente osservabili e deterministici il piano generato può essere generato
Corso di Aggiornamento Obbligatorio per Medici di Medicina Generale Le Cure Palliative in Medicina Generale L etica dell accompagnamento
 Corso di Aggiornamento Obbligatorio per Medici di Medicina Generale Le Cure Palliative in Medicina Generale L etica dell accompagnamento Arezzo, 18 marzo 2006 Ordine dei Medici, Viale Giotto 134 Dott.
Corso di Aggiornamento Obbligatorio per Medici di Medicina Generale Le Cure Palliative in Medicina Generale L etica dell accompagnamento Arezzo, 18 marzo 2006 Ordine dei Medici, Viale Giotto 134 Dott.
TECNICHE DI SIMULAZIONE
 TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
TECNICHE DI SIMULAZIONE INTRODUZIONE Francesca Mazzia Dipartimento di Matematica Università di Bari a.a. 2004/2005 TECNICHE DI SIMULAZIONE p. 1 Introduzione alla simulazione Una simulazione è l imitazione
Appendice III. Competenza e definizione della competenza
 Appendice III. Competenza e definizione della competenza Competenze degli psicologi Lo scopo complessivo dell esercizio della professione di psicologo è di sviluppare e applicare i principi, le conoscenze,
Appendice III. Competenza e definizione della competenza Competenze degli psicologi Lo scopo complessivo dell esercizio della professione di psicologo è di sviluppare e applicare i principi, le conoscenze,
SCIENZE E TECNOLOGIA
 SCIENZE E TECNOLOGIA COMPETENZE Dimostra conoscenze scientifico-tecnologiche che gli consentono di analizzare dati e fatti della realtà e di verificare l'attendibilità delle analisi quantitative e statistiche
SCIENZE E TECNOLOGIA COMPETENZE Dimostra conoscenze scientifico-tecnologiche che gli consentono di analizzare dati e fatti della realtà e di verificare l'attendibilità delle analisi quantitative e statistiche
PROJECT MANAGEMENT SERVIZI DI PROJECT MANAGEMENT DI ELEVATA PROFESSIONALITÀ
 PROJECT MANAGEMENT SERVIZI DI PROJECT MANAGEMENT DI ELEVATA PROFESSIONALITÀ SERVIZI DI PROJECT MANAGEMENT CENTRATE I VOSTRI OBIETTIVI LA MISSIONE In qualità di clienti Rockwell Automation, potete contare
PROJECT MANAGEMENT SERVIZI DI PROJECT MANAGEMENT DI ELEVATA PROFESSIONALITÀ SERVIZI DI PROJECT MANAGEMENT CENTRATE I VOSTRI OBIETTIVI LA MISSIONE In qualità di clienti Rockwell Automation, potete contare
I principi di Anffas Onlus sul tema della presa in carico precoce Michele Imperiali comitato tecnico anffas onlus
 I principi di Anffas Onlus sul tema della presa in carico precoce Michele Imperiali comitato tecnico anffas onlus Partire dalla culla.. Esiste un rapporto diretto tra il tempismo con cui ha luogo il processo
I principi di Anffas Onlus sul tema della presa in carico precoce Michele Imperiali comitato tecnico anffas onlus Partire dalla culla.. Esiste un rapporto diretto tra il tempismo con cui ha luogo il processo
leaders in engineering excellence
 leaders in engineering excellence engineering excellence Il mondo di oggi, in rapida trasformazione, impone alle imprese di dotarsi di impianti e macchinari più affidabili e sicuri, e di più lunga durata.
leaders in engineering excellence engineering excellence Il mondo di oggi, in rapida trasformazione, impone alle imprese di dotarsi di impianti e macchinari più affidabili e sicuri, e di più lunga durata.
Indice generale. OOA Analisi Orientata agli Oggetti. Introduzione. Analisi
 Indice generale OOA Analisi Orientata agli Oggetti Introduzione Analisi Metodi d' analisi Analisi funzionale Analisi del flusso dei dati Analisi delle informazioni Analisi Orientata agli Oggetti (OOA)
Indice generale OOA Analisi Orientata agli Oggetti Introduzione Analisi Metodi d' analisi Analisi funzionale Analisi del flusso dei dati Analisi delle informazioni Analisi Orientata agli Oggetti (OOA)
MESA PROJECT ITIS G. Cardano Pavia New Curriculum
 MESA PROJECT ITIS G. Cardano Pavia New Curriculum L'impatto delle innovazioni educative del Progetto MESA ha portato alcuni cambiamenti significativi e miglioramenti nel curriculum dei seguenti argomenti:
MESA PROJECT ITIS G. Cardano Pavia New Curriculum L'impatto delle innovazioni educative del Progetto MESA ha portato alcuni cambiamenti significativi e miglioramenti nel curriculum dei seguenti argomenti:
Piazza dei Martiri, 1/2-40121 Bologna
 Piazza dei Martiri, 1/2-40121 Bologna Tolmezzo 09 Settembre 2011 TECNICI (NEUROPSICHIATRI, PSICOLOGI, LOGOPEDISTI INSEGNANTI DI OGNI ORDINE E GRADO GENITORI E DISLESSICI ADULTI Sensibilizzare il mondo
Piazza dei Martiri, 1/2-40121 Bologna Tolmezzo 09 Settembre 2011 TECNICI (NEUROPSICHIATRI, PSICOLOGI, LOGOPEDISTI INSEGNANTI DI OGNI ORDINE E GRADO GENITORI E DISLESSICI ADULTI Sensibilizzare il mondo
I nuovi strumenti per la didattica delle discipline scientifiche. Giovanni Tarantino
 I nuovi strumenti per la didattica delle discipline scientifiche Giovanni Tarantino I diversi aspetti dell orientamento Conoscersi per orientarsi: quali obiettivi per l orientamento formativo in ambito
I nuovi strumenti per la didattica delle discipline scientifiche Giovanni Tarantino I diversi aspetti dell orientamento Conoscersi per orientarsi: quali obiettivi per l orientamento formativo in ambito
COME SVILUPPARE UN EFFICACE PIANO DI INTERNET MARKETING
 Febbraio Inserto di Missione Impresa dedicato allo sviluppo pratico di progetti finalizzati ad aumentare la competitività delle imprese. COME SVILUPPARE UN EFFICACE PIANO DI INTERNET MARKETING COS E UN
Febbraio Inserto di Missione Impresa dedicato allo sviluppo pratico di progetti finalizzati ad aumentare la competitività delle imprese. COME SVILUPPARE UN EFFICACE PIANO DI INTERNET MARKETING COS E UN
ALLINEARSI: IL DRIVER PER UNA INNOVAZIONE DI SUCCESSO!
 ALLINEARSI: IL DRIVER PER UNA INNOVAZIONE DI SUCCESSO! L allineamento del team esecutivo è definibile come l accordo dei membri del team in merito a: 1. Allineamento personale -consapevolezza dell impatto
ALLINEARSI: IL DRIVER PER UNA INNOVAZIONE DI SUCCESSO! L allineamento del team esecutivo è definibile come l accordo dei membri del team in merito a: 1. Allineamento personale -consapevolezza dell impatto
PROGRAMMAZIONE COMPETENZE CHIAVE DI CITTADINANZA
 PROGRAMMAZIONE COMPETENZE CHIAVE DI CITTADINANZA COMPETENZA 1 IMPARARE AD IMPARARE Abilità/ Capacità Organizzare il proprio lavoro autonomamente - Rispettare le consegne - Mettere in atto strategie appropriate
PROGRAMMAZIONE COMPETENZE CHIAVE DI CITTADINANZA COMPETENZA 1 IMPARARE AD IMPARARE Abilità/ Capacità Organizzare il proprio lavoro autonomamente - Rispettare le consegne - Mettere in atto strategie appropriate
CHI SIAMO. BeOn è una società di consulenza italiana ad alta specializzazione in ambito di valutazione, sviluppo e formazione delle risorse umane.
 www.beon-dp.com Operiamo in ambito di: Sviluppo Assessment e development Center Valutazione e feedback a 360 Formazione Coaching CHI SIAMO BeOn è una società di consulenza italiana ad alta specializzazione
www.beon-dp.com Operiamo in ambito di: Sviluppo Assessment e development Center Valutazione e feedback a 360 Formazione Coaching CHI SIAMO BeOn è una società di consulenza italiana ad alta specializzazione
STATUTO PER IL SITO INTERNET DELL ENCJ
 STATUTO PER IL SITO INTERNET DELL ENCJ Introduzione Il sito www.encj.net è il sito internet della Rete Europea dei Consigli di Giustizia (ENCJ). È stato stilato uno statuto redazionale al fine di regolare
STATUTO PER IL SITO INTERNET DELL ENCJ Introduzione Il sito www.encj.net è il sito internet della Rete Europea dei Consigli di Giustizia (ENCJ). È stato stilato uno statuto redazionale al fine di regolare
IL CORPO E IL MOVIMENTO. INDICATORI OBIETTIVI di APPRENDIMENTO STANDARD PER LA VALUTAZIONE DELLE COMPETENZE DELL ALUNNO
 SCUOLA DELL INFANZIA IL CORPO E IL MOVIMENTO POTENZIARE LE ATTIVITÀ MOTORIE ALLE ATTIVITÀ DI GIOCO MOTORIO/ SPORTIVO DENOMINARE E INDIVIDUARE LE PARTI DEL CORPO CONTROLLANDOLE GLOBALMENTE. DISCRIMINARE
SCUOLA DELL INFANZIA IL CORPO E IL MOVIMENTO POTENZIARE LE ATTIVITÀ MOTORIE ALLE ATTIVITÀ DI GIOCO MOTORIO/ SPORTIVO DENOMINARE E INDIVIDUARE LE PARTI DEL CORPO CONTROLLANDOLE GLOBALMENTE. DISCRIMINARE
RICERCA-AZIONE. l insegnamento riflessivo. Caterina Bortolani-2009
 RICERCA-AZIONE ovvero l insegnamento riflessivo Gli insegnanti sono progettisti.. riflettono sul contesto nel quale devono lavorare sugli obiettivi che vogliono raggiungere decidono quali contenuti trattare
RICERCA-AZIONE ovvero l insegnamento riflessivo Gli insegnanti sono progettisti.. riflettono sul contesto nel quale devono lavorare sugli obiettivi che vogliono raggiungere decidono quali contenuti trattare
COACHING. Bocconi Alumni Association. Presentazione
 COACHING Bocconi Alumni Association Presentazione INDICE Perché il Coaching? Coaching e Mentoring: le differenze Ruoli, competenze e comportamenti del Coach e del Coachee (cliente) Regole del rapporto
COACHING Bocconi Alumni Association Presentazione INDICE Perché il Coaching? Coaching e Mentoring: le differenze Ruoli, competenze e comportamenti del Coach e del Coachee (cliente) Regole del rapporto
I PROCESSI GESTITI DALLA FUNZIONE DI MARKETING. Prof. Giancarlo Ferrero Corso di marketing Università di Urbino
 2 I PROCESSI GESTITI DALLA FUNZIONE DI MARKETING 1 IL PROCESSO DI CREAZIONE DEL VALORE Finalità del marketing: la creazione di valore per il cliente e per l impresa. Le fasi del processo di creazione del
2 I PROCESSI GESTITI DALLA FUNZIONE DI MARKETING 1 IL PROCESSO DI CREAZIONE DEL VALORE Finalità del marketing: la creazione di valore per il cliente e per l impresa. Le fasi del processo di creazione del
I modelli normativi. I modelli per l eccellenza. I modelli di gestione per la qualità. ! I modelli normativi. ! I modelli per l eccellenza
 1 I modelli di gestione per la qualità I modelli normativi I modelli per l eccellenza Entrambi i modelli si basano sull applicazione degli otto principi del TQM 2 I modelli normativi I modelli normativi
1 I modelli di gestione per la qualità I modelli normativi I modelli per l eccellenza Entrambi i modelli si basano sull applicazione degli otto principi del TQM 2 I modelli normativi I modelli normativi
La ricerca empirica in educazione
 La ricerca empirica in educazione Alberto Fornasari Docente di Pedagogia Sperimentale Dipartimento di Scienze della Formazione, Psicologia, Comunicazione Il ricercatore ha il compito di trovare relazioni
La ricerca empirica in educazione Alberto Fornasari Docente di Pedagogia Sperimentale Dipartimento di Scienze della Formazione, Psicologia, Comunicazione Il ricercatore ha il compito di trovare relazioni
Capitolo 4 - Teoria della manutenzione: la gestione del personale
 Capitolo 4 - Teoria della manutenzione: la gestione del personale Con il presente capitolo si chiude la presentazione delle basi teoriche della manutenzione. Si vogliono qui evidenziare alcune problematiche
Capitolo 4 - Teoria della manutenzione: la gestione del personale Con il presente capitolo si chiude la presentazione delle basi teoriche della manutenzione. Si vogliono qui evidenziare alcune problematiche
* Obiettivi trasversali con tecnologia
 Ministero dell istruzione, dell università e della ricerca Istituto Comprensivo Giulio Bevilacqua Via Cardinale Giulio Bevilacqua n 8 25046 Cazzago San Martino (Bs) telefono 030 / 72.50.53 - fax 030 /
Ministero dell istruzione, dell università e della ricerca Istituto Comprensivo Giulio Bevilacqua Via Cardinale Giulio Bevilacqua n 8 25046 Cazzago San Martino (Bs) telefono 030 / 72.50.53 - fax 030 /
Azione di sistema per l'obbligo di istruzione e la continuità fra Secondarie di I e II grado - Fase 2- USP Torino"
 Azione di sistema per l'obbligo di istruzione e la continuità fra Secondarie di I e II grado - Fase 2- USP Torino" Competenze d asse e di cittadinanza Docenti: Cipriani Anna, Ist. Mag. Berti - TO Del Sonno
Azione di sistema per l'obbligo di istruzione e la continuità fra Secondarie di I e II grado - Fase 2- USP Torino" Competenze d asse e di cittadinanza Docenti: Cipriani Anna, Ist. Mag. Berti - TO Del Sonno
LA CONOSCENZA DEL MONDO
 SCUOLA DELL INFANZIA INDICATORI LA CONOSCENZA OBIETTIVI DI APPRENDIMENTO 3 anni 4 anni 5 anni. DEL MONDO FISICO E.. Esplorare con curiosità attraverso i sensi. Manipolare materiali diversi. Sperimentare
SCUOLA DELL INFANZIA INDICATORI LA CONOSCENZA OBIETTIVI DI APPRENDIMENTO 3 anni 4 anni 5 anni. DEL MONDO FISICO E.. Esplorare con curiosità attraverso i sensi. Manipolare materiali diversi. Sperimentare
L evoluzione della PA locale: Trasparenza e Benchmark per creare valore
 #costruireefficienza L evoluzione della PA locale: Trasparenza e Benchmark per creare valore Maria Teresa Monteduro Dirigente Generale - Dipartimento delle Finanze #FPA2015 - Roma, 27 maggio 2015 Dal 2009
#costruireefficienza L evoluzione della PA locale: Trasparenza e Benchmark per creare valore Maria Teresa Monteduro Dirigente Generale - Dipartimento delle Finanze #FPA2015 - Roma, 27 maggio 2015 Dal 2009
PROGETTAZIONE FORMATIVA ANNUALE PROGETTAZIONE ANNUALE DIDATTICA:
 PROGETTAZIONE FORMATIVA ANNUALE Docente Plesso Classe.. Disciplina/Macroarea/Campo d esperienza Laura Colombini. S.Infanzia G.Giusti... Sezione Gruppo intersezione bambini di 3 anni.. La conoscenza del
PROGETTAZIONE FORMATIVA ANNUALE Docente Plesso Classe.. Disciplina/Macroarea/Campo d esperienza Laura Colombini. S.Infanzia G.Giusti... Sezione Gruppo intersezione bambini di 3 anni.. La conoscenza del
IL MANAGER COACH: MODA O REQUISITO DI EFFICACIA. Nelle organizzazioni la gestione e lo sviluppo dei collaboratori hanno una importanza fondamentale.
 IL MANAGER COACH: MODA O REQUISITO DI EFFICACIA Nelle organizzazioni la gestione e lo sviluppo dei collaboratori hanno una importanza fondamentale. Gestione e sviluppo richiedono oggi comportamenti diversi
IL MANAGER COACH: MODA O REQUISITO DI EFFICACIA Nelle organizzazioni la gestione e lo sviluppo dei collaboratori hanno una importanza fondamentale. Gestione e sviluppo richiedono oggi comportamenti diversi
TOLLO CH -VIA CAVOUR N.2
 TOLLO CH -VIA CAVOUR N.2 Tel. 0871. 961126-961587 Fax 0871 961126 email chic81300t@istruzione.it chic81300t@pec.istruzione.it www.istitutocomprensivotollo.it CHIC81300T Cod. Fisc. 80003000694 PROGETTO
TOLLO CH -VIA CAVOUR N.2 Tel. 0871. 961126-961587 Fax 0871 961126 email chic81300t@istruzione.it chic81300t@pec.istruzione.it www.istitutocomprensivotollo.it CHIC81300T Cod. Fisc. 80003000694 PROGETTO
In quanti modi posso lanciare ed afferrare la palla? Chi riesce a?
 CARATTERISTICHE GENERALI DEI GIOCHI INDIVIDUALI CON UN ATTREZZO Gioco con l attrezzo Manipolazioni, da solo: lanciare, afferrare, Per riuscire a gestire far rotolare, l attrezzo. calciare. Per riuscire
CARATTERISTICHE GENERALI DEI GIOCHI INDIVIDUALI CON UN ATTREZZO Gioco con l attrezzo Manipolazioni, da solo: lanciare, afferrare, Per riuscire a gestire far rotolare, l attrezzo. calciare. Per riuscire
Dalla Diagnosi Funzionale al PEI. Valutazione delle abilità attraverso l osservazione del comportamento e i test
 Dalla Diagnosi Funzionale al PEI Valutazione delle abilità attraverso l osservazione del comportamento e i test Effetti del non Valutare Sopravvalutare Problemi di comportamento (isolamento) Sottovalutare
Dalla Diagnosi Funzionale al PEI Valutazione delle abilità attraverso l osservazione del comportamento e i test Effetti del non Valutare Sopravvalutare Problemi di comportamento (isolamento) Sottovalutare
Orientamento in uscita - Università
 ISTITUTO ISTRUZIONE SUPERIORE G. FALCONE - ASOLA (MN) Orientamento in uscita - Università prof. Ruggero Remaforte A.S.. 2012/2013 Premettendo che per orientare bisogna attivare non solo strumenti ma anche
ISTITUTO ISTRUZIONE SUPERIORE G. FALCONE - ASOLA (MN) Orientamento in uscita - Università prof. Ruggero Remaforte A.S.. 2012/2013 Premettendo che per orientare bisogna attivare non solo strumenti ma anche
Accogliere e trattenere i volontari in associazione. Daniela Caretto Lecce, 27-28 aprile
 Accogliere e trattenere i volontari in associazione Daniela Caretto Lecce, 27-28 aprile Accoglienza Ogni volontario dovrebbe fin dal primo incontro con l associazione, potersi sentire accolto e a proprio
Accogliere e trattenere i volontari in associazione Daniela Caretto Lecce, 27-28 aprile Accoglienza Ogni volontario dovrebbe fin dal primo incontro con l associazione, potersi sentire accolto e a proprio
PIANO BIENNALE PER I DIRITTI DELLE PERSONE CON DISABILITÀ
 PIANO BIENNALE PER I DIRITTI DELLE PERSONE CON DISABILITÀ 15 novembre 2014 Daniela Sangiovanni Comunicazione e Ufficio stampa Policlinico S,Orsola ACCESSIBILITÀ Gli Stati dovrebbero riconoscere l importanza
PIANO BIENNALE PER I DIRITTI DELLE PERSONE CON DISABILITÀ 15 novembre 2014 Daniela Sangiovanni Comunicazione e Ufficio stampa Policlinico S,Orsola ACCESSIBILITÀ Gli Stati dovrebbero riconoscere l importanza
La Pianificazione Operativa o Master Budget
 La Pianificazione Operativa o Master Budget Questo corso è destinato ai vari imprenditori e manager delle piccole e medie imprese, che desiderano conoscere un sistema pratico e semplice per fare il piano
La Pianificazione Operativa o Master Budget Questo corso è destinato ai vari imprenditori e manager delle piccole e medie imprese, che desiderano conoscere un sistema pratico e semplice per fare il piano
Seminario di Formazione Sales & Marketing Alberghiero SALES & MORE CONSULTING FORMAZIONE
 Seminario di Formazione Sales & Marketing Alberghiero SALES & MORE CONSULTING FORMAZIONE Marketing Strategico L'analisi attenta del mercato di riferimento può aprire nuove prospettive al business alberghiero:
Seminario di Formazione Sales & Marketing Alberghiero SALES & MORE CONSULTING FORMAZIONE Marketing Strategico L'analisi attenta del mercato di riferimento può aprire nuove prospettive al business alberghiero:
UTILIZZATORI A VALLE: COME RENDERE NOTI GLI USI AI FORNITORI
 UTILIZZATORI A VALLE: COME RENDERE NOTI GLI USI AI FORNITORI Un utilizzatore a valle di sostanze chimiche dovrebbe informare i propri fornitori riguardo al suo utilizzo delle sostanze (come tali o all
UTILIZZATORI A VALLE: COME RENDERE NOTI GLI USI AI FORNITORI Un utilizzatore a valle di sostanze chimiche dovrebbe informare i propri fornitori riguardo al suo utilizzo delle sostanze (come tali o all
IL PERCORSO DI COACHING
 IL PERCORSO DI COACHING UNA RISORSA PER IL CAMBIAMENTO PROFESSIONALE E IL POTENZIAMENTO PERSONALE Non c èc nulla che spaventi di più l uomo che prendere coscienza dell immensit immensità di cosa è capace
IL PERCORSO DI COACHING UNA RISORSA PER IL CAMBIAMENTO PROFESSIONALE E IL POTENZIAMENTO PERSONALE Non c èc nulla che spaventi di più l uomo che prendere coscienza dell immensit immensità di cosa è capace
SPUNTI DI RIFLESSIONE per TECNICI DI CALCIO
 SPUNTI DI RIFLESSIONE per TECNICI DI CALCIO Casalmaiocco, 04 MARZO 2013 Marco prof. Manzotti E-mail: m.manzotti@alice.it IL GIOCO DEL CALCIO SPORT DI SQUADRA SPORT DI CONFRONTO SPORT CON ATTREZZO SPORT
SPUNTI DI RIFLESSIONE per TECNICI DI CALCIO Casalmaiocco, 04 MARZO 2013 Marco prof. Manzotti E-mail: m.manzotti@alice.it IL GIOCO DEL CALCIO SPORT DI SQUADRA SPORT DI CONFRONTO SPORT CON ATTREZZO SPORT
PROTOCOLLO PER L ACCOGLIENZA ALUNNI DIVERSAMENTE ABILI
 Ministero dell Istruzione dell Università e della Ricerca Istituto Comprensivo NORD 2 - Brescia Via Costalunga, 15-25123 BRESCIA Cod. Min. BSIC88400D - Cod.Fisc. 80049710173 Tel.030307858-0308379448-9
Ministero dell Istruzione dell Università e della Ricerca Istituto Comprensivo NORD 2 - Brescia Via Costalunga, 15-25123 BRESCIA Cod. Min. BSIC88400D - Cod.Fisc. 80049710173 Tel.030307858-0308379448-9
Lezione 4. Controllo di gestione. Il controllo direzionale
 Lezione 4 Il controllo direzionale Sistema di pianificazione e controllo PIANIFICAZIONE STRATEGICA PIANO 1 2 OBIETTIVI OBIETTIVI ATTIVITA 3 DI LUNGO PERIODO DI BREVE PERIODO OPERATIVA 5 BUDGET FEED-BACK
Lezione 4 Il controllo direzionale Sistema di pianificazione e controllo PIANIFICAZIONE STRATEGICA PIANO 1 2 OBIETTIVI OBIETTIVI ATTIVITA 3 DI LUNGO PERIODO DI BREVE PERIODO OPERATIVA 5 BUDGET FEED-BACK
Professional Coaching:
 Professional Coaching: un supporto alla crescita della Persona per lo sviluppo di Imprese, Imprenditori e Professionisti 22 Novembre 2011 - ItaliaProfessioni - Unione Confcommercio Milano 1 IL COACHING
Professional Coaching: un supporto alla crescita della Persona per lo sviluppo di Imprese, Imprenditori e Professionisti 22 Novembre 2011 - ItaliaProfessioni - Unione Confcommercio Milano 1 IL COACHING
AUTISMO E SPORT: ASPETTI LUDICI ED EDUCATIVI. Dott.ssa Sara Ambrosetto Psicologa e Psicoterapeuta Cognitivo Comportamentale
 AUTISMO E SPORT: ASPETTI LUDICI ED EDUCATIVI Dott.ssa Sara Ambrosetto Psicologa e Psicoterapeuta Cognitivo Comportamentale Che cos è lo sport? Lo sport viene definito come l'insieme delle attività, individuali
AUTISMO E SPORT: ASPETTI LUDICI ED EDUCATIVI Dott.ssa Sara Ambrosetto Psicologa e Psicoterapeuta Cognitivo Comportamentale Che cos è lo sport? Lo sport viene definito come l'insieme delle attività, individuali
Project Cycle Management La programmazione della fase di progettazione esecutiva. La condivisione dell idea progettuale.
 Project Cycle Management La programmazione della fase di progettazione esecutiva. La condivisione dell idea progettuale. Il presente materiale didattico costituisce parte integrante del percorso formativo
Project Cycle Management La programmazione della fase di progettazione esecutiva. La condivisione dell idea progettuale. Il presente materiale didattico costituisce parte integrante del percorso formativo
03. Il Modello Gestionale per Processi
 03. Il Modello Gestionale per Processi Gli aspetti strutturali (vale a dire l organigramma e la descrizione delle funzioni, ruoli e responsabilità) da soli non bastano per gestire la performance; l organigramma
03. Il Modello Gestionale per Processi Gli aspetti strutturali (vale a dire l organigramma e la descrizione delle funzioni, ruoli e responsabilità) da soli non bastano per gestire la performance; l organigramma
Calcolo delle probabilità
 Calcolo delle probabilità Laboratorio di Bioinformatica Corso A aa 2005-2006 Statistica Dai risultati di un esperimento si determinano alcune caratteristiche della popolazione Calcolo delle probabilità
Calcolo delle probabilità Laboratorio di Bioinformatica Corso A aa 2005-2006 Statistica Dai risultati di un esperimento si determinano alcune caratteristiche della popolazione Calcolo delle probabilità
Lezione 1 Introduzione
 Lezione 1 Introduzione Argomenti Cosa è l Economia politica I principi fondamentali dell Economia politica Cosa studia l Economia politica Perché studiare l Economia politica 1.1 COSA È L ECONOMIA POLITICA
Lezione 1 Introduzione Argomenti Cosa è l Economia politica I principi fondamentali dell Economia politica Cosa studia l Economia politica Perché studiare l Economia politica 1.1 COSA È L ECONOMIA POLITICA
La Guida per l Organizzazione degli Studi professionali
 La Guida per l Organizzazione degli Studi professionali Gianfranco Barbieri Senior Partner di Barbieri & Associati Dottori Commercialisti Presidente dell Associazione Culturale Economia e Finanza gianfranco.barbieri@barbierieassociati.it
La Guida per l Organizzazione degli Studi professionali Gianfranco Barbieri Senior Partner di Barbieri & Associati Dottori Commercialisti Presidente dell Associazione Culturale Economia e Finanza gianfranco.barbieri@barbierieassociati.it
CHE COS E IL PROGETTO ALTERNANZA SCUOLA - LAVORO?
 CHE COS E IL PROGETTO ALTERNANZA SCUOLA - LAVORO? Le finalità del Dlgs. 77/2005 I percorsi di formazione in Alternanza Scuola-Lavoro sono realizzati con l obiettivo di: attuare modalità di apprendimento
CHE COS E IL PROGETTO ALTERNANZA SCUOLA - LAVORO? Le finalità del Dlgs. 77/2005 I percorsi di formazione in Alternanza Scuola-Lavoro sono realizzati con l obiettivo di: attuare modalità di apprendimento
LABORATORIO DI SISTEMI
 ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
ALUNNO: Fratto Claudio CLASSE: IV B Informatico ESERCITAZIONE N : 1 LABORATORIO DI SISTEMI OGGETTO: Progettare e collaudare un circuito digitale capace di copiare le informazioni di una memoria PROM in
MANUALE DELLA QUALITÀ Pag. 1 di 6
 MANUALE DELLA QUALITÀ Pag. 1 di 6 INDICE GESTIONE DELLE RISORSE Messa a disposizione delle risorse Competenza, consapevolezza, addestramento Infrastrutture Ambiente di lavoro MANUALE DELLA QUALITÀ Pag.
MANUALE DELLA QUALITÀ Pag. 1 di 6 INDICE GESTIONE DELLE RISORSE Messa a disposizione delle risorse Competenza, consapevolezza, addestramento Infrastrutture Ambiente di lavoro MANUALE DELLA QUALITÀ Pag.
La repubblica riconosce la funzione sociale della cooperazione a carattere di mutualità e senza fini di speculazione privata.
 Cooperativa è... COOPERATIVA è... Art. 45 della Costituzione Italiana La repubblica riconosce la funzione sociale della cooperazione a carattere di mutualità e senza fini di speculazione privata. La legge
Cooperativa è... COOPERATIVA è... Art. 45 della Costituzione Italiana La repubblica riconosce la funzione sociale della cooperazione a carattere di mutualità e senza fini di speculazione privata. La legge
DESCRITTORI DELLA SCHEDA DI VALUTAZIONE DELLA SCUOLA PRIMARIA
 DESCRITTORI DELLA SCHEDA DI VALUTAZIONE DELLA SCUOLA PRIMARIA Scuola Primaria G. Sordini Istituto Comprensivo Spoleto 2 Indicatori per la scheda di valutazione della classe I ITALIANO: Narrare brevi esperienze
DESCRITTORI DELLA SCHEDA DI VALUTAZIONE DELLA SCUOLA PRIMARIA Scuola Primaria G. Sordini Istituto Comprensivo Spoleto 2 Indicatori per la scheda di valutazione della classe I ITALIANO: Narrare brevi esperienze
Alternanza scuola lavoro: che cosa significa
 Alternanza scuola lavoro: che cosa significa È una modalità didattica realizzata in collaborazione fra scuole e imprese per offrire ai giovani competenze spendibili nel mercato del lavoro e favorire l
Alternanza scuola lavoro: che cosa significa È una modalità didattica realizzata in collaborazione fra scuole e imprese per offrire ai giovani competenze spendibili nel mercato del lavoro e favorire l
Le funzioni educative del consultorio familiare
 Le funzioni educative del consultorio familiare Consultori familiari Legge quadro n. 405/1975: ai consultori è affidata la funzione di aiutare la famiglia ad affrontare nel modo migliore i propri stadi
Le funzioni educative del consultorio familiare Consultori familiari Legge quadro n. 405/1975: ai consultori è affidata la funzione di aiutare la famiglia ad affrontare nel modo migliore i propri stadi
DIMENSIONI CRITERI INDICATORI
 Allegato 4 - Manerbio META EDUCATIVA: autonomia in ambito scolastico (classe 4/5 scuola primaria) DIMENSIONI CRITERI INDICATORI GESTIONALE OPERATIVA Uso degli strumenti Conoscere gli strumenti necessari
Allegato 4 - Manerbio META EDUCATIVA: autonomia in ambito scolastico (classe 4/5 scuola primaria) DIMENSIONI CRITERI INDICATORI GESTIONALE OPERATIVA Uso degli strumenti Conoscere gli strumenti necessari
DIPARTIMENTO DI STUDI UMANISTICI
 DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
DIPARTIMENTO DI STUDI UMANISTICI Corso di Laurea Interdipartimentale in Scienze della Formazione Primaria( Ind.Primaria) A.A 2013/2014 REPORT SULL ELABORAZIONE DI UN AGENTE ARITIFICIALE TEORIA E METODOLOGIA
IL MINIBASKET in ITALIA :
 IL MINIBASKET in ITALIA : l Emozione, la Scoperta e il Gioco. I primi intervento per l angolo tecnico del nostro sito li voglio prendere da una delle esperienze professionalmente più gratificanti della
IL MINIBASKET in ITALIA : l Emozione, la Scoperta e il Gioco. I primi intervento per l angolo tecnico del nostro sito li voglio prendere da una delle esperienze professionalmente più gratificanti della
Il tirocinio extracurriculare. come, quando, dove e perché
 Il tirocinio extracurriculare come, quando, dove e perché Contenuti Cos è un tirocinio Le finalità del tirocinio extracurriculare La legislazione che lo regola Come cercare informazioni Prima di iniziare
Il tirocinio extracurriculare come, quando, dove e perché Contenuti Cos è un tirocinio Le finalità del tirocinio extracurriculare La legislazione che lo regola Come cercare informazioni Prima di iniziare
Piattaforma software mfp
 Piattaforma software mfp MANUALE UTENTE DELL APPLICATIVO VDE Introduzione Q uesto modulo di mfp si occupa della valutazione della domanda espressa dal cliente. E uno strumento di INTAKE e quindi come tale
Piattaforma software mfp MANUALE UTENTE DELL APPLICATIVO VDE Introduzione Q uesto modulo di mfp si occupa della valutazione della domanda espressa dal cliente. E uno strumento di INTAKE e quindi come tale
OSSERVAZIONI TEORICHE Lezione n. 4
 OSSERVAZIONI TEORICHE Lezione n. 4 Finalità: Sistematizzare concetti e definizioni. Verificare l apprendimento. Metodo: Lettura delle OSSERVAZIONI e risoluzione della scheda di verifica delle conoscenze
OSSERVAZIONI TEORICHE Lezione n. 4 Finalità: Sistematizzare concetti e definizioni. Verificare l apprendimento. Metodo: Lettura delle OSSERVAZIONI e risoluzione della scheda di verifica delle conoscenze
La leadership sanitaria:
 La leadership sanitaria: una nuova dimensione per le professioni sanitarie Dott. Alessandro Rovetta Leadership SAPER CREARE UN MONDO AL QUALE LE PERSONE DESIDERINO APPARTENERE 1 Perchè servono professionisti
La leadership sanitaria: una nuova dimensione per le professioni sanitarie Dott. Alessandro Rovetta Leadership SAPER CREARE UN MONDO AL QUALE LE PERSONE DESIDERINO APPARTENERE 1 Perchè servono professionisti
IL CURRICOLO DI SCUOLA ARTE E IMMAGINE
 IL CURRICOLO DI SCUOLA ARTE E IMMAGINE SCUOLA DELL INFANZIA CAMPI DI ESPERIENZA - IMMAGINI.SUONI, COLORI SCUOLAPRIMARIA DISCIPLINE: - ARTE E IMMAGINE SCUOLA SECONDARIA I GRADO DISCIPLINE: - ARTE E IMMAGINE
IL CURRICOLO DI SCUOLA ARTE E IMMAGINE SCUOLA DELL INFANZIA CAMPI DI ESPERIENZA - IMMAGINI.SUONI, COLORI SCUOLAPRIMARIA DISCIPLINE: - ARTE E IMMAGINE SCUOLA SECONDARIA I GRADO DISCIPLINE: - ARTE E IMMAGINE
11. Evoluzione del Software
 11. Evoluzione del Software Andrea Polini Ingegneria del Software Corso di Laurea in Informatica (Ingegneria del Software) 11. Evoluzione del Software 1 / 21 Evoluzione del Software - generalità Cosa,
11. Evoluzione del Software Andrea Polini Ingegneria del Software Corso di Laurea in Informatica (Ingegneria del Software) 11. Evoluzione del Software 1 / 21 Evoluzione del Software - generalità Cosa,
Modulo: Scarsità e scelta
 In queste pagine è presentato un primo modello di conversione di concetti, schemi e argomentazioni di natura teorica relativi all argomento le scelte di consumo (presentato preliminarmente in aula e inserito
In queste pagine è presentato un primo modello di conversione di concetti, schemi e argomentazioni di natura teorica relativi all argomento le scelte di consumo (presentato preliminarmente in aula e inserito
SISTEMI MULTIAGENTE. Esercizio
 Esercizio SISTEMI MULTIAGENTE Nello studio dei sistemi dinamici complessi la simulazione al computer ha un ruolo importante dal momento che presenta molti vantaggi rispetto ai metodi sperimentali più tradizionali;
Esercizio SISTEMI MULTIAGENTE Nello studio dei sistemi dinamici complessi la simulazione al computer ha un ruolo importante dal momento che presenta molti vantaggi rispetto ai metodi sperimentali più tradizionali;
La valutazione nella didattica per competenze
 Nella scuola italiana il problema della valutazione delle competenze è particolarmente complesso, infatti la nostra scuola è tradizionalmente basata sulla trasmissione di saperi e saper fare ed ha affrontato
Nella scuola italiana il problema della valutazione delle competenze è particolarmente complesso, infatti la nostra scuola è tradizionalmente basata sulla trasmissione di saperi e saper fare ed ha affrontato
Che cos è l intelligenza e come funzionano i test del Q.I.
 Che cos è l intelligenza e come funzionano i test del Q.I. Non esiste, al giorno d oggi, un parere unanime della comunità scientifica sulla definizione di intelligenza. In generale, potremmo dire che è
Che cos è l intelligenza e come funzionano i test del Q.I. Non esiste, al giorno d oggi, un parere unanime della comunità scientifica sulla definizione di intelligenza. In generale, potremmo dire che è
Strutturazione logica dei dati: i file
 Strutturazione logica dei dati: i file Informazioni più complesse possono essere composte a partire da informazioni elementari Esempio di una banca: supponiamo di voler mantenere all'interno di un computer
Strutturazione logica dei dati: i file Informazioni più complesse possono essere composte a partire da informazioni elementari Esempio di una banca: supponiamo di voler mantenere all'interno di un computer
Le figure professionali di riferimento per l Ingegneria Biomedica
 Quali sono le attività ità di un laureato in Ingegneria Biomedica? Ingegnere biomedico junior inserito in una azienda di progetto e/o produzione di dispositivi medici Tecnico delle apparecchiature biomediche
Quali sono le attività ità di un laureato in Ingegneria Biomedica? Ingegnere biomedico junior inserito in una azienda di progetto e/o produzione di dispositivi medici Tecnico delle apparecchiature biomediche
UNITÀ APPRENDIMENTO Scuola Primaria di Bellano / classi 4ª A 4ª B a.s. 2014/15
 OBIETTIVI GENERALI APPROFONDIRE LA CONOSCENZA DELLE PRINCIPALI NORME DI ALIMENTAZIONE, IGIENE E SICUREZZA PERSONALE - Conoscere le modalità d uso d attrezzi, strumenti e ambienti in cui si vive e le norme
OBIETTIVI GENERALI APPROFONDIRE LA CONOSCENZA DELLE PRINCIPALI NORME DI ALIMENTAZIONE, IGIENE E SICUREZZA PERSONALE - Conoscere le modalità d uso d attrezzi, strumenti e ambienti in cui si vive e le norme
Scaletta della lezione:
 NATURA DELLA CONTABILITA DIREZIONALE Scaletta della lezione: 1. L approccio di Anthony al controllo di gestione 2. Natura e fini delle informazioni - informazioni per l esterno - informazioni per l interno
NATURA DELLA CONTABILITA DIREZIONALE Scaletta della lezione: 1. L approccio di Anthony al controllo di gestione 2. Natura e fini delle informazioni - informazioni per l esterno - informazioni per l interno
COME COSTRUIRE UNA UDA: INDICAZIONI METODOLOGICHE
 COME COSTRUIRE UNA UDA: INDICAZIONI METODOLOGICHE Riunione Collegio Docenti, 30 Ottobre 2012 A cura della Prof.ssa Valentina Zocco, Figura Strumentale al Riordino e Aggiornamento Per un lessico comune
COME COSTRUIRE UNA UDA: INDICAZIONI METODOLOGICHE Riunione Collegio Docenti, 30 Ottobre 2012 A cura della Prof.ssa Valentina Zocco, Figura Strumentale al Riordino e Aggiornamento Per un lessico comune
Socio/relazionale: partecipazione attiva al gioco, in forma agonistica, collaborando con gli altri
 Federazione Italiana Pallacanestro Settore Giovanile Minibasket e Scuola Lezioni Integrate Minibasket I Fondamentali con palla Traguardi di Competenza. Partiamo dalle linee guida: Motorio/funzionale padronanza,
Federazione Italiana Pallacanestro Settore Giovanile Minibasket e Scuola Lezioni Integrate Minibasket I Fondamentali con palla Traguardi di Competenza. Partiamo dalle linee guida: Motorio/funzionale padronanza,
DEPLOY YOUR BUSINESS
 DEPLOY YOUR BUSINESS COS É ARROCCO? E uno strumento online per lo sviluppo del Piano Economico-Finanziario del Business Plan. Arrocco è uno strumento online appositamente progettato per lo sviluppo di
DEPLOY YOUR BUSINESS COS É ARROCCO? E uno strumento online per lo sviluppo del Piano Economico-Finanziario del Business Plan. Arrocco è uno strumento online appositamente progettato per lo sviluppo di
CRM: IL FUTURO DEL MARKETING ATTRAVERSO LA CONOSCENZA DEL CLIENTE
 UNIVERSITÁ DEGLI STUDI DI UDINE FACOLTÁ DI ECONOMIA Corso di Laurea in Economia Aziendale Esame di Laurea CRM: IL FUTURO DEL MARKETING ATTRAVERSO LA CONOSCENZA DEL CLIENTE Tutore: Prof. Maria Chiarvesio
UNIVERSITÁ DEGLI STUDI DI UDINE FACOLTÁ DI ECONOMIA Corso di Laurea in Economia Aziendale Esame di Laurea CRM: IL FUTURO DEL MARKETING ATTRAVERSO LA CONOSCENZA DEL CLIENTE Tutore: Prof. Maria Chiarvesio
organizzazioni di volontariato
 Il bilancio sociale per le organizzazioni di volontariato Modena, 1 Ottobre 2009 Bilancio sociale Cosa ci viene in mente? Rendere conto Perché fare un bilancio? La relazione di fiducia Ti dico chiaramente
Il bilancio sociale per le organizzazioni di volontariato Modena, 1 Ottobre 2009 Bilancio sociale Cosa ci viene in mente? Rendere conto Perché fare un bilancio? La relazione di fiducia Ti dico chiaramente
La quotazione delle PMI su AIM Italia e gli investitori istituzionali nel capitale. Bologna 31 marzo 2015
 1 La quotazione delle PMI su AIM Italia e gli investitori istituzionali nel capitale Bologna 1 marzo 2015 2 L'AIM Italia (Alternative Investment Market) è il mercato di Borsa Italiana dedicato alle piccole
1 La quotazione delle PMI su AIM Italia e gli investitori istituzionali nel capitale Bologna 1 marzo 2015 2 L'AIM Italia (Alternative Investment Market) è il mercato di Borsa Italiana dedicato alle piccole
VADEMECUM PER L INSEGNANTE DI SOSTEGNO
 VADEMECUM PER L INSEGNANTE DI SOSTEGNO a cura di Irene Baratella Funzione Strumentale per l Integrazione dell I.C. B. Bizio di Longare (VI) - a.s. 2006-2007 aggiornato dalle Funzioni Strumentali delle
VADEMECUM PER L INSEGNANTE DI SOSTEGNO a cura di Irene Baratella Funzione Strumentale per l Integrazione dell I.C. B. Bizio di Longare (VI) - a.s. 2006-2007 aggiornato dalle Funzioni Strumentali delle
Il servizio di registrazione contabile. che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili
 Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
Il servizio di registrazione contabile che consente di azzerare i tempi di registrazione delle fatture e dei relativi movimenti contabili Chi siamo Imprese giovani e dinamiche ITCluster nasce a Torino
Cos è il Software Didattico
 Cos è il Software Didattico Per poter utilizzare efficacemente il software didattico è necessario innanzitutto capire che cosa si intende con questo termine e quali sono le sue principali caratteristiche.
Cos è il Software Didattico Per poter utilizzare efficacemente il software didattico è necessario innanzitutto capire che cosa si intende con questo termine e quali sono le sue principali caratteristiche.
Un gioco con tre dadi
 Un gioco con tre dadi Livello scolare: biennio Abilità interessate Costruire lo spazio degli eventi in casi semplici e determinarne la cardinalità. Valutare la probabilità in diversi contesti problematici.
Un gioco con tre dadi Livello scolare: biennio Abilità interessate Costruire lo spazio degli eventi in casi semplici e determinarne la cardinalità. Valutare la probabilità in diversi contesti problematici.
La gestione di un calcolatore. Sistemi Operativi primo modulo Introduzione. Sistema operativo (2) Sistema operativo (1)
 Sistema operativo (1)") La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
La gestione di un calcolatore Sistemi Operativi primo modulo Introduzione Augusto Celentano Università Ca Foscari Venezia Corso di Laurea in Informatica Un calcolatore (sistema di elaborazione) è un sistema
Scopo della lezione. Informatica. Informatica - def. 1. Informatica
 Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Scopo della lezione Informatica per le lauree triennali LEZIONE 1 - Che cos è l informatica Introdurre i concetti base della materia Definire le differenze tra hardware e software Individuare le applicazioni
Psicologia dell orientamento scolastico e professionale. Indice
 INSEGNAMENTO DI PSICOLOGIA DELL ORIENTAMENTO SCOLASTICO E PROFESSIONALE LEZIONE I ORIENTAMENTO E PSICOLOGIA PROF.SSA ANNAMARIA SCHIANO Indice 1 L orientamento: significato e tipologie ---------------------------------------------------------------
INSEGNAMENTO DI PSICOLOGIA DELL ORIENTAMENTO SCOLASTICO E PROFESSIONALE LEZIONE I ORIENTAMENTO E PSICOLOGIA PROF.SSA ANNAMARIA SCHIANO Indice 1 L orientamento: significato e tipologie ---------------------------------------------------------------
Le competenze dell infermiere in tutte le fasi del PDTA per pazienti con tumore della prostata I bisogni del paziente nelle varie fasi del percorso
 Le competenze dell infermiere in tutte le fasi del PDTA per pazienti con tumore della prostata I bisogni del paziente nelle varie fasi del percorso Anna Rita De Luigi e Rita Reggiani 10 dicembre 2014 Perché
Le competenze dell infermiere in tutte le fasi del PDTA per pazienti con tumore della prostata I bisogni del paziente nelle varie fasi del percorso Anna Rita De Luigi e Rita Reggiani 10 dicembre 2014 Perché
Strumenti avanzati per lo studio della sicurezza stradale
 Strumenti avanzati per lo studio della sicurezza stradale Francesco Frendo, Riccardo Bartolozzi, Francesco Bucchi Dipartimento di ingegneria Meccanica, Nucleare e della Produzione (DIMNP) - Università
Strumenti avanzati per lo studio della sicurezza stradale Francesco Frendo, Riccardo Bartolozzi, Francesco Bucchi Dipartimento di ingegneria Meccanica, Nucleare e della Produzione (DIMNP) - Università
Archivio WebQuest I Grafi e le Reti
 Archivio WebQuest I Grafi e le Reti Spazi applicativi di grafi e reti La teoria dei grafi nata quasi come esclusivo "oggetto matematico" ha tratto notorietà e importanza dalla capacità di rendere topologicamente
Archivio WebQuest I Grafi e le Reti Spazi applicativi di grafi e reti La teoria dei grafi nata quasi come esclusivo "oggetto matematico" ha tratto notorietà e importanza dalla capacità di rendere topologicamente
Che cosa e come valutano le prove di matematica e con quali risultati. nell A.S. 2008 2009
 Che cosa e come valutano le prove di matematica e con quali risultati nell A.S. 2008 2009 Presentazione a cura di Roberta Michelini Casalpusterlengo, 8 gennaio 2010 http://www.invalsi.it/esamidistato0809/
Che cosa e come valutano le prove di matematica e con quali risultati nell A.S. 2008 2009 Presentazione a cura di Roberta Michelini Casalpusterlengo, 8 gennaio 2010 http://www.invalsi.it/esamidistato0809/
Sistema di misurazione e valutazione della performance individuale del personale dell Ente Foreste della Sardegna Allegati
 Sistema di misurazione e valutazione della performance individuale del personale dell Ente Foreste della Sardegna (Approvati con Delibera del Consiglio di Amministrazione n. 145 del 11.09.2014, sulla base
Sistema di misurazione e valutazione della performance individuale del personale dell Ente Foreste della Sardegna (Approvati con Delibera del Consiglio di Amministrazione n. 145 del 11.09.2014, sulla base
LO SVILUPPO DI COMPETENZE PERSONALI: NUMERO E SPAZIO
 LO SVILUPPO DI COMPETENZE PERSONALI: NUMERO E SPAZIO Il corpo è il mezzo attraverso il quale il bambino è capace di effettuare conoscenze, di esprimere emozioni, di attuare continui confronti in rapporto
LO SVILUPPO DI COMPETENZE PERSONALI: NUMERO E SPAZIO Il corpo è il mezzo attraverso il quale il bambino è capace di effettuare conoscenze, di esprimere emozioni, di attuare continui confronti in rapporto