FISICA. CdS Scienze Biologiche. Stefania Spagnolo. Dip. di Matematica e Fisica Ennio De Giorgi
|
|
|
- Agnella Mancuso
- 5 anni fa
- Visualizzazioni
Transcript
1 FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia) Diario del programma e delle lezioni svolte Stefania Spagnolo
2 INTRODUZIONE: fissiamo le idee Esercizi 2

 45")
 (1.")

3 INTRODUZIONE: fissiamo le idee 1 yard = m a) 45 x 10-5 m = 0.45mm b) (1.06/2.40) 3 x =0.86 x
4 CINEMATICA DEL PUNTO MATERIALE Definizione di Velocità numerose definizioni. Definizione di Accelerazione. un paio di definizioni moto rettilineo uniforme moto rettilineo uniformemente accelerato 4
5 CINEMATICA DEL PUNTO MATERIALE spostamento = A d = lunghezza del percorso (tratteggiato) A r(t) Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, impiega il tempo Δt = tb - ta percorre il percorso tratteggiato in figura, che ha lunghezza d lo spostamento del punto materiale è il vettore A O Conoscere la traiettoria del punto materiale significa conoscere il suo vettore di posizione ad ogni istante di tempo r(t) il vettore spostamento ci fornisce solo un informazione riassuntiva (globale) sul moto la posizione istantanea r(t), nota istante per istante, descrive completamente il moto 5
6 CINEMATICA DEL PUNTO MATERIALE spostamento = A d = lunghezza del percorso (tratteggiato) A Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, impiega il tempo Δt = tb - ta percorre il percorso tratteggiato in figura, che ha lunghezza d lo spostamento del punto materiale è il vettore A Definizioni velocità scalare media vs,m = d / Δt quantità scalare che tiene conto dell intero percorso effettivo e ci da velocità media vm = A / Δt = Δr / Δt dove un indicazione Δr = rb - ra del valore medio del modulo della velocità istante per velocità istantanea v ( t ) = d r(t) / dt istante; ci fornisce un informazione accelerazione media am = Δv / dt riassuntiva (globale) sul moto accelerazione istantanea a ( t ) = d v(t )/ dt 6
7 CINEMATICA DEL PUNTO MATERIALE spostamento = A d = lunghezza del percorso (tratteggiato) ra x z O y A rb Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, impiega il tempo Δt = tb - ta percorre il percorso tratteggiato in figura, che ha lunghezza d lo spostamento del punto materiale è il vettore A Definizioni velocità scalare media vs,m = d / Δt velocità media vm = A / Δt = Δr / Δt dove Δr = rb - ra velocità istantanea v ( t ) = d r(t) / dt quantità vettoriale; è un vettore parallelo al vettore spostamento; accelerazione media am = Δv / dt tiene conto solo del punto iniziale e accelerazione istantanea a ( t ) = d v(t )/ dt del punto finale del percorso; ci fornisce un informazione riassuntiva (globale) sul moto 7
8 CINEMATICA DEL PUNTO MATERIALE spostamento = A d = lunghezza del percorso (tratteggiato) Definizioni velocità scalare media velocità media velocità istantanea accelerazione media vs,m = d / Δt vm = A / Δt = Δr / Δt dove Δr = rb - ra v ( t ) = d r(t) / dt am = Δv / dt accelerazione istantanea a ( t ) = d v(t )/ dt x z O y A r(t+dt) r(t) Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, dr(t)/dt impiega = v(t) il tempo Δt = tb - ta dr(t) percorre il percorso tratteggiato in figura, che ha lunghezza d lo spostamento del punto materiale è il vettore A La velocità istantanea, dipende dal punto sulla traiettoria, cioè dipende dal tempo; quantità vettoriale; è un vettore tangente alla traiettoria in ogni suo punto (orientato concordemente con il verso del moto); rappresenta la variazione (in modulo direzione e verso) della posizione del punto materiale in un intervallo di tempo infinitesimo di tempo diviso per la durata dell intervallo (infinitesimo) stesso; ci fornisce un informazione istantanea (dipendente dal punto/tempo) sul moto 8
9 CINEMATICA DEL PUNTO MATERIALE vb va x z O y A Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, impiega il tempo Δt = tb - ta percorre il percorso tratteggiato in figura, che ha lunghezza d lo spostamento del punto materiale è il vettore A Definizioni velocità scalare media vs,m = d / Δt L accelerazione media è una quantità vettoriale; tiene conto solo velocità media vm = A / Δt = Δr / Δt dove della velocità Δr = rb - iniziale ra e finale e rappresenta la variazione totale di velocità istantanea v ( t ) = d r(t) / dt velocità nel percorso (vb-va) divisa accelerazione media am = Δv / Δt per la durata complessiva del moto. Ci fornisce un informazione accelerazione istantanea a ( t ) = d v(t )/ dt riassuntiva (globale) sul moto 9
10 CINEMATICA DEL PUNTO MATERIALE va x z O y A v(t+dt) a(t) v(t) Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, impiega il tempo Δt = tb - ta percorre il percorso tratteggiato in figura, che ha lunghezza d lo spostamento del punto materiale è il vettore A Definizioni L accelerazione istantanea è una velocità scalare media vs,m = d / Δt quantità vettoriale; descrive la rapidità con cui cambia la velocità velocità media vm = A / Δt = Δr / Δt punto Δr = per rb - punto ra (cioè ad ogni istante velocità istantanea v ( t ) = dr(t) / dt di tempo). Ci fornisce accelerazione media am = Δv / Δt un informazione istantanea (dipendente dal punto/tempo) sul accelerazione istantanea a ( t ) = dv(t ) / dt moto 10
11 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE x ^ A Un punto materiale si sposta dal punto A al punto B parte al tempo ta e arriva al tempo tb, impiega il tempo Δt = tb - ta percorre un percorso rettilineo arbitrario tra A e B, che ha lunghezza d (può procedere andando avanti e poi tornando indietro e ancora avanti, per esempio) lo spostamento del punto materiale è il vettore A Definizioni velocità scalare media vs,m = d / Δt velocità media vm = A / Δt = (Δx / Δt) x ^ Δx = xb - xa vm = vm x= ^ Δx / Δt velocità istantanea v ( t ) = v(t) x ^ = ( dx(t) / dt ) x ^ accelerazione media am = Δv / Δt accelerazione istantanea a ( t ) = a(t) x ^ = ( dv(t ) / dt ) x^ 11
 > v ( t ) = dx( t ) / dt v(t) è la pendenza della retta tangente alla curva (funzione) x(t) in funzione di t")
12 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE velocità istantanea v ( t ) = v(t) x ^ = ( dx(t) / dt ) x ^ componente x (nella direzione del moto) > v ( t ) = dx( t ) / dt v(t) è la pendenza della retta tangente alla curva (funzione) x(t) in funzione di t 12
13 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE velocità media in una dimensione 13

14 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE velocità istantanea in una dimensione 14
15 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE accelerazione media in una dimensione 15

16 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE accelerazione istantanea in una dimensione 16
17 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Consideriamo casi semplici: Velocità costante: v(t) = v0 per ogni istante di tempo t cioè la velocità istantanea non cambia mai ne modulo ne velocità ne verso la velocità scalare media = v0 la velocità media (componente sull asse del moto) è v0 in tempi uguali il punto materiale percorre distanze uguali x(t) = xa + v0 (t - ta) moto rettilineo uniforme NOTA: velocità costante SIGNIFICA accelerazione nulla 17
18 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Consideriamo casi semplici: Velocità costante: v(t) = v0 per ogni istante di tempo t x(t) = xa + v0 (t - ta) moto rettilineo uniforme 18
19 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Consideriamo casi semplici: Accelerazione costante: a(t) = a0 per ogni istante di tempo t cioè l accelerazione istantanea non cambia mai ne modulo ne velocità ne verso la velocità non è costante ma cresce in modo uniforme in tempi uguali la velocità del punto materiale cambia per quantità uguali v(t) = va + a0 (t - ta) x(t) = xa +va (t-ta) +(1/2) a0 (t - ta) 2 moto rettilineo uniformemente accelerato per ta =0 19
20 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE DIMOSTRAZIONE NOTA: questo non è un passaggio banale, vedi la dimostrazione nella prossima slide 20
, tra t0 e t è uguale allo spostamento totale lungo l asse x.")
21 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Consideriamo casi semplici: Accelerazione costante: a(t) = a0 per ogni istante di tempo t v f (v f +v 0) /2 v(t) = va + a0 (t - ta) NOTA: l area sotto la curva v(t), tra t0 e t è uguale allo spostamento totale lungo l asse x. Infatti, dividendo il tempo t-t0 in intervallini infinitesimi l area sotto la curva risulta uguale alla somma (integrale) delle aree di rettangolini di base (infinitesima) dt e altezza v. L area sotto la curva v(t) è la somma dei dx(area del rettangolino) = vdt per tutti i rettangolini; perciò risulta uguale a x totale L area sotto la curva v(t) [A], d altra parte, può essere calcolata come somma dell area di un rettangolo (di lati v0 e t-t0) e di un triangolo reattangolo con cateti vf-v0 e t-t0: A = v0 x (t-t0) x (vf -v0)x(t-t0) = = 0.5 x (v0 + vf) = media aritmetica del valore iniziale e finale della velocità per (t-t0). PERTANTO: x = (v0+vf)(t-t0)/2 => Abbiamo dimostrato che in un moto uniformemente accelerato vmedia = media aritmetica di velocità iniziale e finale. 21
22 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Accelerazione costante: a(t) = a0 per ogni istante di tempo t v(t) = va + a0 (t - ta) x(t) = xa +va (t-ta) +(1/2) a0 (t - ta) 2 moto rettilineo uniformemente accelerato 22
 2) x(t) = xa +va (t-ta) +(1/2) a0 (t - ta) 2 moto rettilineo uniformemente accelerato DIMOSTRAZIONE 1) 2)")
23 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Accelerazione costante: a(t) = a0 per ogni istante di tempo t 1) v(t) = va + a0 (t - ta) 2) x(t) = xa +va (t-ta) +(1/2) a0 (t - ta) 2 moto rettilineo uniformemente accelerato DIMOSTRAZIONE 1) 2) 23
24 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Esempio di moto rettilineo uniformemente accelerato: corpi in caduta libera ^ g=-gy asse y Le osservazioni di Galileo dimostrarono che tutti i corpi (indipendentemente dalla loro massa ) lasciati cadere sono soggetti alla stessa accelerazione COSTANTE diretta verso la terra g asse x 24
25 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Esempio di moto rettilineo uniformemente accelerato: corpi in caduta libera fissato il sistema di riferimento come in figura (asse y verticale che punta verso l alto) la traiettoria di un corpo in caduta libera è y(t) = y0 + v0 t - (1/2) g t 2 y0 è la posizione y iniziale del corpo v = v0 y ^ è la velocità iniziale del corpo asse y g asse x 25
 = -g tt = - ( 2hg ) ^ y0 = h; v0 = -v0 y y(t) = h - v0t - gt 2 /2 la mela raggiunte la terra ( y(tt)=0 ) at tempo tt 0 = h - v0tt - gtt 2 /2 tt = [-v0 ± ( v0 2 +2hg )]/g velocità all impatto")
26 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Esercizi y0 = h; v0 = 0 y(t) = h - gt 2 /2 la mela raggiunte la terra ( y(tt)=0 ) at tempo tt 0 = h - gtt 2 /2 => tt = ( 2h/g ) velocità all impatto v(tt) = -g tt = - ( 2hg ) ^ y0 = h; v0 = -v0 y y(t) = h - v0t - gt 2 /2 la mela raggiunte la terra ( y(tt)=0 ) at tempo tt 0 = h - v0tt - gtt 2 /2 tt = [-v0 ± ( v0 2 +2hg )]/g velocità all impatto v(tt) = -v0 - g tt = - ( v0 2 +2hg) ^ y0 = h; v0 = v0 y y(t) = h + v0t - gt 2 /2 la mela raggiunte la terra ( y(tt)=0 ) at tempo tt 0 = h - v0tt - gtt 2 /2 tt = [+v0 ± ( v0 2 +2hg )]/g velocità all impatto v(tt) = v0 - g tt = - ( v0 2 +2hg) quota massima at tymax, in cui v(tymax)=0= v0 -g tymax tymax = v0/g ymax = y(tymax) = h + v0 2 /2g asse y h g v0 = 0 asse y h g v0 asse y h g v0 asse x asse x asse x 26

27 MOTO IN DUE DIMENSIONI: PROIETTILE proiettile: corpo lanciato con una velocità iniziale che ha una componente verticale e una orizzontale asse y v0x x0 asse x asse y h g v0y asse x 27
28 MOTO IN DUE DIMENSIONI: PROIETTILE proiettile: corpo lanciato con una velocità iniziale che ha una componente verticale e una orizzontale vx(t) = v0x x(t) = x0 + v0x t v0 = v0 cosθ ^ x +v0 sinθ ^ y v0 = ^ v0x x ^ +v0y y v0x vy(t) = v0y - g t y(t) = y0 + v0y t - (1/2) g t 2 tempo dell impatto tt = [+v0y + ( v0y 2 +2hg )]/g asse y h g v0 asse y = moto rett. x0 unif. in X θ x0 asse x moto rett. unif. acc. in Y modulo della velocità all impatto v(tt) = [ v0x 2 + ( v0y 2 +2hg) ] quota massima at tymax, in cui vy(tymax)=0= v0y -g tymax tymax = v0y / g ymax = y(tymax) = h + v0y 2 /2g asse x asse y h g v0y x all impatto (gittata del proiettile) x (tt)= x0 + v0x tt = x0 + v0x [v0y + ( v0y 2 +2hg )]/g asse x 28
29 MOTO IN DUE DIMENSIONI: PROIETTILE proiettile: corpo lanciato con una velocità iniziale che ha una componente verticale e una orizzontale x0 = 0 h=0 29

30 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Esercizi 30
31 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Esercizi Ricorda che [analisi] il valore della derivata prima di una funzione f(x) in un certo punto (x0) rappresenta la pendenza della retta del piano x,y che nel punto (x0,f(x0)) risulta tangente alla curva del piano i cui punti hanno coordinate (x,y=f(x)), cioè alla curva che rappresenta il grafico della funzione f(x) 31
32 CINEMATICA DEL PUNTO MATERIALE IN UNA DIMENSIONE Esercizi 32

33 MOTO IN DUE DIMENSIONI: PROIETTILE Esercizi 33
34 Forze e Leggi della Dinamica M. Taiuti, M.T. Tuccio Appunti di Fisica per Biologia in (Università di Genova) 34
 = kg m s -2 Una forza che agisce su un corpo implica la presenza di un secondo corpo responsabile di applicare la")
35 FORZE E LEGGI DELLA DINAMICA Le forze che agiscono su un corpo si sommano vettorialmente M (massa inerziale) è una proprietà intrinseca del corpo su cui agiscono le forze Unità di misura della forza è il N (Newton) = kg m s -2 Una forza che agisce su un corpo implica la presenza di un secondo corpo responsabile di applicare la forza 35


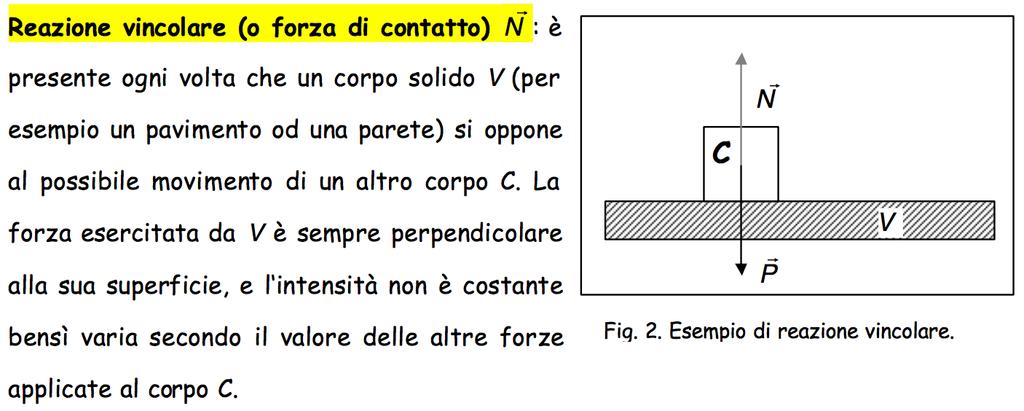
36 FORZE 36
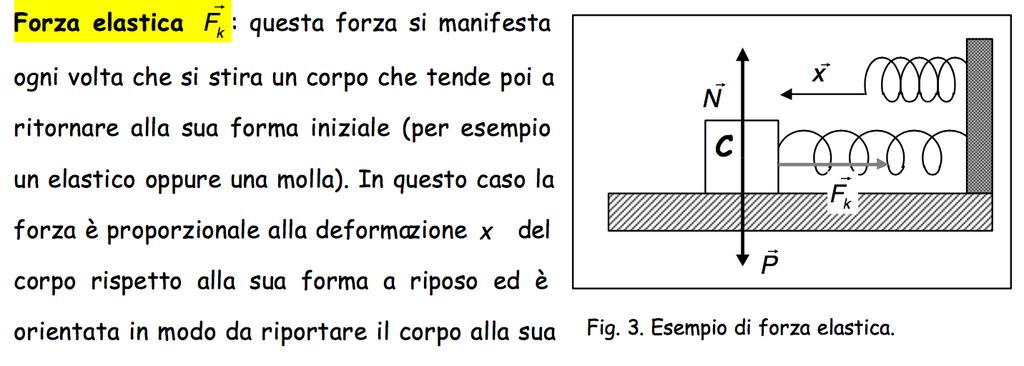
37 FORZE 37

38 FORZE quiete finché F// < μs N μs coeff. di attrito statico μd coeff. di attrito dinamico 38


39 FORZE F= ^ -G M1M2 r / r 2 z M2 r^ y x M1 R T = 6.37 x 10 6 m 39

40 FORZE F= k ^ q1q2 r / r 2 z q2 ^ r x q1 y 40

41 FORZE Esercizi 41
42 FORZE Esercizi 42
43 MOTO CIRCOLARE UNIFORME un arco di lunghezza s è percorso nel tempo t il periodo T è il tempo necessario a percorrere l intera circonferenza 2 π R = v T frequenza: ν = 1/Τ pulsazione: 2 π ν = ω 43

 = ( Δv / v )(v / Δt) = ( Δr / r )(v / Δt) = ( Δr / Δt ) v/r = v 2")
44 MOTO CIRCOLARE UNIFORME vf è perpendicolare a rf DIMOSTRAZIONE il triangolo rosso è simile al triangolo nero (perché Δθ è uguale nei due triangoli e due lati sono in rapporti uguali: rf/vf = ri/vi ) allora Δr / r = Δv / v => vi è perpendicolare a ri quindi l angolo tra vf e vi è uguale all angolo tra rf e ri ac = (Δv / Δt) = ( Δv / v )(v / Δt) = ( Δr / r )(v / Δt) = ( Δr / Δt ) v/r = v 2 / r 44
45 MOTO CIRCOLARE UNIFORME s(t) = vt; ds = v dt un punto sulla circonferenza ha coordinate cartesiane x,y polari (ρ, θ) con ρ costante ΝΟΤΑ: ds = Rdθ => v = ds/dt = R dθ/dt => dθ/dt = ω quindi, velocità tangenziale v costante in modulo significa velocità angolare costante ω Le equazioni del moto sono quindi ρ(t) = R θ(t) = θ0+ω(t -t0) x(t) = R cos( ω (t-t0) + θ0 ) y(t) = R sin( ω (t-t0) + θ0 ) coordinate polari coordinate cartesiane ω = velocità angolare istantanea un arco di lunghezza s è percorso nel tempo t s(t) = vt il periodo T è il tempo necessario a percorrere l intera circonferenza 2 π R = v T frequenza: ν = 1/Τ pulsazione: 2 π ν = ω 45

46 MOTO CIRCOLARE UNIFORME Esercizi 46
47 MOTO CIRCOLARE UNIFORME Esercizi 47

48 FORZE Forza d attrito viscoso: F = - b v pallina che cade in un fluido (liquido o gas) v parte dal valore iniziale 0 aumenta (a causa di g) vettore accelerazione il modulo diminuisce fino ad annullarsi quando v aumenta, diminuisce ay F = -mg - bv = mdvy/dt vettore velocità il modulo aumenta e raggiunge un valore limite 48
49 FORZE Forza d attrito viscoso: F = - b v pallina che cade in un fluido (liquido o gas) velocità limite = mg/b F = -mg - bv = mdvy/dt costante di tempo τ = m/b -mg - b v = m dv/dt => dv / (bv + mg) = -dt/m (1/b) ln ( bv + mg ) = -t/m ( bv + mg )/mg = exp( -tb/m ) v( t ) = (mg/b) ( exp (-bt/m) - 1 ) NOTA v( 0 ) = 0 v( inf ) -mg/b [rivolta verso il basso naturalmente] 49
FISICA. CdS Scienze Biologiche. Stefania Spagnolo. Dip. di Matematica e Fisica Ennio De Giorgi
 FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi http://www.dmf.unisalento.it/~spagnolo stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia)
FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi http://www.dmf.unisalento.it/~spagnolo stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia)
S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie. Cap. 2. Cinematica del punto
 SBarbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie Cap 2 Cinematica del punto 21 - Posizione, velocitá e accelerazione di una particella La posizione di una particella puó essere definita, ad
SBarbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie Cap 2 Cinematica del punto 21 - Posizione, velocitá e accelerazione di una particella La posizione di una particella puó essere definita, ad
Cinematica in due o più dimensioni
 Cinematica in due o più dimensioni Le grandezze cinematiche fondamentali: posizione, velocità, accelerazione, sono dei vettori nello spazio a due o tre dimensioni, dotati di modulo, direzione, verso. In
Cinematica in due o più dimensioni Le grandezze cinematiche fondamentali: posizione, velocità, accelerazione, sono dei vettori nello spazio a due o tre dimensioni, dotati di modulo, direzione, verso. In
parametri della cinematica
 Cinematica del punto Consideriamo il moto di una particella: per particella si intende sia un corpo puntiforme (ad es. un elettrone), sia un qualunque corpo esteso che si muove come una particella, ovvero
Cinematica del punto Consideriamo il moto di una particella: per particella si intende sia un corpo puntiforme (ad es. un elettrone), sia un qualunque corpo esteso che si muove come una particella, ovvero
FISICA. CdS Scienze Biologiche. Stefania Spagnolo. Dip. di Matematica e Fisica Ennio De Giorgi
 FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi http://www.dmf.unisalento.it/~spagnolo stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia)
FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi http://www.dmf.unisalento.it/~spagnolo stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia)
Cinematica. A.Solano - Fisica - CTF
 Cinematica Posizione, spostamento, traiettoria Velocità media e istantanea Accelerazione media e istantanea Moto rettilineo uniforme Moto rettilineo uniformemente accelerato Oggetti in caduta libera Moto
Cinematica Posizione, spostamento, traiettoria Velocità media e istantanea Accelerazione media e istantanea Moto rettilineo uniforme Moto rettilineo uniformemente accelerato Oggetti in caduta libera Moto
Introduzione alla Meccanica: Cinematica
 Introduzione alla Meccanica: Cinematica La Cinematica si occupa della descrizione geometrica del moto, senza riferimento alle sue cause. E invece compito della Dinamica mettere in relazione il moto con
Introduzione alla Meccanica: Cinematica La Cinematica si occupa della descrizione geometrica del moto, senza riferimento alle sue cause. E invece compito della Dinamica mettere in relazione il moto con
Università del Sannio
 Università del Sannio Corso di Fisica 1 Lezione 4 Prof.ssa Stefania Petracca 1 Vettore posizione Per poter generalizzare i concetti introdotti nella lezione precedente al caso bidimensionale, e successivamente
Università del Sannio Corso di Fisica 1 Lezione 4 Prof.ssa Stefania Petracca 1 Vettore posizione Per poter generalizzare i concetti introdotti nella lezione precedente al caso bidimensionale, e successivamente
Introduzione alla Meccanica: Cinematica
 Introduzione alla Meccanica: Cinematica La Cinematica si occupa della descrizione geometrica del moto, senza riferimento alle sue cause. E invece compito della Dinamica mettere in relazione il moto con
Introduzione alla Meccanica: Cinematica La Cinematica si occupa della descrizione geometrica del moto, senza riferimento alle sue cause. E invece compito della Dinamica mettere in relazione il moto con
a = a = costante v x = v t = v x a x = Δv Δt = v v x x t
 Moto uniformemente accelerato(1) Se un corpo si muove con accelerazione costante il suo moto si dice uniformemente accelerato a = a = costante In un moto uniformemente accelerato Ø L accelerazione media
Moto uniformemente accelerato(1) Se un corpo si muove con accelerazione costante il suo moto si dice uniformemente accelerato a = a = costante In un moto uniformemente accelerato Ø L accelerazione media
Equazioni del moto in 1 dimensione:
 Equazioni del moto in 1 dimensione: O Velocità media come rapporto incrementale tra spazio percorso e tempo In generale la velocità varia istante per istante 1 Velocità istantanea: limite del rapporto
Equazioni del moto in 1 dimensione: O Velocità media come rapporto incrementale tra spazio percorso e tempo In generale la velocità varia istante per istante 1 Velocità istantanea: limite del rapporto
Lezione 2 - Lo studio del moto
 Lezione 2 - Lo studio del moto Tradizionalmente lo studio del moto viene diviso in cinematica e dinamica Cinematica pura descrizione del moto Dinamica investigazione sulle cause del moto con l applicazione
Lezione 2 - Lo studio del moto Tradizionalmente lo studio del moto viene diviso in cinematica e dinamica Cinematica pura descrizione del moto Dinamica investigazione sulle cause del moto con l applicazione
x(t) = R 0 + R(t) dx(t) dt v(t) = = dr(t) dt Moto circolare uniforme Principi della dinamica
 = R 0 + R(t) dx(t) dt v(t) = = dr(t) dt Moto circolare uniforme Principi della dinamica") Il moto con velocità scalare costante si dice moto. La traiettoria è una circonferenza, caratterizzata dunque da un punto centrale e da un raggio, e giacente su un piano. Si tratta quindi di un moto bidimensionale.
Il moto con velocità scalare costante si dice moto. La traiettoria è una circonferenza, caratterizzata dunque da un punto centrale e da un raggio, e giacente su un piano. Si tratta quindi di un moto bidimensionale.
τ (τ vettore tangente al posto di u) ^ ^ G. Bracco - Appunti di Fisica Generale
 ^ ^ G. Bracco - Appunti di Fisica Generale") Consideriamo ancora l accelerazione scomposta in comp.tang e radiale e vediamo di ricavare analiticamente le relazioni già incontrate. u(t+δt) Δθ Δu Ricordiamo che la derivata di un vettore w=(x,y,z) in
Consideriamo ancora l accelerazione scomposta in comp.tang e radiale e vediamo di ricavare analiticamente le relazioni già incontrate. u(t+δt) Δθ Δu Ricordiamo che la derivata di un vettore w=(x,y,z) in
GRANDEZZA FISICA. EQUAZIONI DIMENSIONALI controllo omogeneità relazioni COSTANTI FONDAMENTALI
 MECCANICA parte I a - GRANDEZZE FISICHE E DIMENSIONI - SISTEMI DI UNITA DI MISURA - SCALARI E VETTORI - SPOSTAMENTO, VELOCITA, ACCELERAZIONE - PRINCIPI DELLA DINAMICA - FORZA GRAVITAZIONALE - MASSA, PESO,
MECCANICA parte I a - GRANDEZZE FISICHE E DIMENSIONI - SISTEMI DI UNITA DI MISURA - SCALARI E VETTORI - SPOSTAMENTO, VELOCITA, ACCELERAZIONE - PRINCIPI DELLA DINAMICA - FORZA GRAVITAZIONALE - MASSA, PESO,
Cinematica del punto. Moto nel piano. Dott.ssa Elisabetta Bissaldi
 Cinematica del punto Moto nel piano Dott.ssa Elisabetta Bissaldi Elisabetta Bissaldi (Politecnico di Bari) A.A. 2018-2019 2 Si consideri un punto materiale che si muove nello spazio descrivendo nel caso
Cinematica del punto Moto nel piano Dott.ssa Elisabetta Bissaldi Elisabetta Bissaldi (Politecnico di Bari) A.A. 2018-2019 2 Si consideri un punto materiale che si muove nello spazio descrivendo nel caso
Analisi del moto dei proietti
 Moto dei proietti E il moto di particelle che vengono lanciate con velocità iniziale v 0 e sono soggette alla sola accelerazione di gravità g supposta costante. La pallina rossa viene lasciata cadere da
Moto dei proietti E il moto di particelle che vengono lanciate con velocità iniziale v 0 e sono soggette alla sola accelerazione di gravità g supposta costante. La pallina rossa viene lasciata cadere da
Cinematica del punto. Moto rettilineo. Dott.ssa Elisabetta Bissaldi
 Cinematica del punto Moto rettilineo Dott.ssa Elisabetta Bissaldi Elisabetta Bissaldi (Politecnico di Bari) A.A. 2018-2019 2 La meccanica Studia il MOTO DEI CORPI Spiega la relazione tra le CAUSE che generano
Cinematica del punto Moto rettilineo Dott.ssa Elisabetta Bissaldi Elisabetta Bissaldi (Politecnico di Bari) A.A. 2018-2019 2 La meccanica Studia il MOTO DEI CORPI Spiega la relazione tra le CAUSE che generano
La descrizione del moto
 Professoressa Corona Paola Classe 1 B anno scolastico 2016-2017 La descrizione del moto Il moto di un punto materiale La traiettoria Sistemi di riferimento Distanza percorsa Lo spostamento La legge oraria
Professoressa Corona Paola Classe 1 B anno scolastico 2016-2017 La descrizione del moto Il moto di un punto materiale La traiettoria Sistemi di riferimento Distanza percorsa Lo spostamento La legge oraria
Fisica per Medicina. Lezione 2 - Matematica e Cinematica. Dr. Cristiano Fontana
 Fisica per Medicina Lezione - Matematica e Cinematica Dr. Cristiano Fontana Dipartimento di Fisica ed Astronomia Galileo Galilei Università degli Studi di Padova 17 ottobre 17 Indice Richiami di matematica
Fisica per Medicina Lezione - Matematica e Cinematica Dr. Cristiano Fontana Dipartimento di Fisica ed Astronomia Galileo Galilei Università degli Studi di Padova 17 ottobre 17 Indice Richiami di matematica
Moto uniforme. Moto dei proiettili
 Un corpo in assenza di accelerazione compie un moto detto. Come avviene di regola il moto di un corpo è determinato una volta note la posizione e la velocità iniziali e l accelerazione durante il moto.
Un corpo in assenza di accelerazione compie un moto detto. Come avviene di regola il moto di un corpo è determinato una volta note la posizione e la velocità iniziali e l accelerazione durante il moto.
FISICA. CdS Scienze Biologiche. Stefania Spagnolo. Dip. di Matematica e Fisica Ennio De Giorgi
 FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi http://www.dmf.unisalento.it/~spagnolo stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia)
FISICA CdS Scienze Biologiche Stefania Spagnolo Dip. di Matematica e Fisica Ennio De Giorgi http://www.dmf.unisalento.it/~spagnolo stefania.spagnolo@le.infn.it (please, usate oggetto/subject: CdSBiologia)
Lezione 3 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Concetto di Forza Leggi di Newton
 Corsi di Laurea in Scienze motorie - Classe L-22 (D.M. 270/04) Dr. Andrea Malizia 1 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Concetto di Forza Leggi di Newton Sistemi
Corsi di Laurea in Scienze motorie - Classe L-22 (D.M. 270/04) Dr. Andrea Malizia 1 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Concetto di Forza Leggi di Newton Sistemi
Lezione 3 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Concetto di Forza Leggi di Newton
 Corsi di Laurea dei Tronchi Comuni 2 e 4 Dr. Andrea Malizia 1 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Concetto di Forza Leggi di Newton Lezione 2 Sistemi di riferimento
Corsi di Laurea dei Tronchi Comuni 2 e 4 Dr. Andrea Malizia 1 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Concetto di Forza Leggi di Newton Lezione 2 Sistemi di riferimento
Il Corso di Fisica per Scienze Biologiche
 Il Corso di Fisica per Scienze Biologiche Ø Prof. Attilio Santocchia Ø Ufficio presso il Dipartimento di Fisica (Quinto Piano) Tel. 075-585 2708 Ø E-mail: attilio.santocchia@pg.infn.it Ø Web: http://cms.pg.infn.it/santocchia/
Il Corso di Fisica per Scienze Biologiche Ø Prof. Attilio Santocchia Ø Ufficio presso il Dipartimento di Fisica (Quinto Piano) Tel. 075-585 2708 Ø E-mail: attilio.santocchia@pg.infn.it Ø Web: http://cms.pg.infn.it/santocchia/
Esercizi di Cinematica
 Esercizio 1 Esercizi di Cinematica Esercitazioni di Fisica LA per ingegneri - A.A. 2009-2010 Data la legge oraria: s(t) = a t 3 b t + c (con a = 3 ms 3, b = 2 ms 1, c = 1 m) calcolare la posizione e la
Esercizio 1 Esercizi di Cinematica Esercitazioni di Fisica LA per ingegneri - A.A. 2009-2010 Data la legge oraria: s(t) = a t 3 b t + c (con a = 3 ms 3, b = 2 ms 1, c = 1 m) calcolare la posizione e la
Cinematica nello Spazio
 Cinematica nello Spazio Abbiamo introdotto, nelle precedenti lezioni, le grandezze fisiche: 1) Spostamento; 2) Velocità; 3) Accelerazione; 4) Tempo. Abbiamo ricavato le equazioni per i moti: a) uniforme;
Cinematica nello Spazio Abbiamo introdotto, nelle precedenti lezioni, le grandezze fisiche: 1) Spostamento; 2) Velocità; 3) Accelerazione; 4) Tempo. Abbiamo ricavato le equazioni per i moti: a) uniforme;
CINEMATICA. Prof Giovanni Ianne
 CINEMATICA Il moto e la velocità L accelerazione Moto rettilineo uniforme Moto rettilineo uniformemente accelerato Moti periodici e composti il moto e la velocità Un corpo è in moto quando la sua posizione
CINEMATICA Il moto e la velocità L accelerazione Moto rettilineo uniforme Moto rettilineo uniformemente accelerato Moti periodici e composti il moto e la velocità Un corpo è in moto quando la sua posizione
Cinematica del punto materiale
 Cinematica del punto materiale E ` la parte piu` elementare della meccanica: studia il moto dei corpi senza riferimento alle sue cause Il moto e` determinato se e` nota la posizione del corpo in funzione
Cinematica del punto materiale E ` la parte piu` elementare della meccanica: studia il moto dei corpi senza riferimento alle sue cause Il moto e` determinato se e` nota la posizione del corpo in funzione
Applicazioni delle leggi della meccanica: moto armnico
 Applicazioni delle leggi della meccanica: moto armnico Discutiamo le caratteristiche del moto armonico utilizzando l esempio di una molla di costante k e massa trascurabile a cui è fissato un oggetto di
Applicazioni delle leggi della meccanica: moto armnico Discutiamo le caratteristiche del moto armonico utilizzando l esempio di una molla di costante k e massa trascurabile a cui è fissato un oggetto di
Cinematica. Descrizione dei moti
 Cinematica Descrizione dei moti Moto di un punto materiale Nella descrizione del moto di un corpo (cinematica) partiamo dal caso più semplice: il punto materiale, che non ha dimensioni proprie. y. P 2
Cinematica Descrizione dei moti Moto di un punto materiale Nella descrizione del moto di un corpo (cinematica) partiamo dal caso più semplice: il punto materiale, che non ha dimensioni proprie. y. P 2
Moti rotatori. Definizioni delle grandezze rotazionali
 Moti rotatori Definizioni delle grandezze rotazionali Moti dei corpi rigidi n Un corpo rigido ha generalmente un moto complesso (vedi un bastone lanciato in aria). n In realtà qualunque moto può essere
Moti rotatori Definizioni delle grandezze rotazionali Moti dei corpi rigidi n Un corpo rigido ha generalmente un moto complesso (vedi un bastone lanciato in aria). n In realtà qualunque moto può essere
Modulo di Fisica (F-N) A.A MECCANICA
 A.A MECCANICA") Modulo di Fisica (F-N) A.A. 2016-2017 MECCANICA COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. COSA E LA MECCANICA? Viene tradizionalmente suddivisa in: CINEMATICA DINAMICA
Modulo di Fisica (F-N) A.A. 2016-2017 MECCANICA COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. COSA E LA MECCANICA? Viene tradizionalmente suddivisa in: CINEMATICA DINAMICA
La lezione di oggi. La cinematica Velocità Accelerazione. Il moto del proiettile Salto verticale
 1 La lezione di oggi La cinematica Velocità Accelerazione Il moto del proiettile Salto erticale Meccanica e cinematica! Meccanica: studio del moto gli oggetti! forze esterne! dimensioni! massa! distribuzione
1 La lezione di oggi La cinematica Velocità Accelerazione Il moto del proiettile Salto erticale Meccanica e cinematica! Meccanica: studio del moto gli oggetti! forze esterne! dimensioni! massa! distribuzione
MECCANICA. Si occupa dei fenomeni connessi al MOVIMENTO dei corpi. CINEMATICA: movimento senza preoccuparsi delle cause MECCANICA
 MECCANICA Si occupa dei fenomeni connessi al MOVIMENTO dei corpi CINEMATICA: movimento senza preoccuparsi delle cause MECCANICA DINAMICA: causa del movimento = Forza F STATICA: fenomeni di non alterazione
MECCANICA Si occupa dei fenomeni connessi al MOVIMENTO dei corpi CINEMATICA: movimento senza preoccuparsi delle cause MECCANICA DINAMICA: causa del movimento = Forza F STATICA: fenomeni di non alterazione
Cinematica del punto materiale
 Cinematica del punto materiale Punto materiale Velocità e accelerazione Moto rettilineo uniforme Moto naturalmente accelerato Moto parabolico Moto armonico Antonio Pierro Per consigli, suggerimenti, eventuali
Cinematica del punto materiale Punto materiale Velocità e accelerazione Moto rettilineo uniforme Moto naturalmente accelerato Moto parabolico Moto armonico Antonio Pierro Per consigli, suggerimenti, eventuali
COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. Fisica con Elementi di Matematica 1
 COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. Fisica con Elementi di Matematica 1 COSA E LA MECCANICA? Viene tradizionalmente suddivisa in: CINEMATICA DINAMICA STATICA
COSA E LA MECCANICA? Studio del MOTO DEI CORPI e delle CAUSE che lo DETERMINANO. Fisica con Elementi di Matematica 1 COSA E LA MECCANICA? Viene tradizionalmente suddivisa in: CINEMATICA DINAMICA STATICA
Meccanica del punto materiale
 Meccanica del punto materiale Princìpi della dinamica. Forze. Momento angolare. Antonio Pierro @antonio_pierro_ (https://twitter.com/antonio_pierro_) Per consigli, suggerimenti, eventuali errori o altro
Meccanica del punto materiale Princìpi della dinamica. Forze. Momento angolare. Antonio Pierro @antonio_pierro_ (https://twitter.com/antonio_pierro_) Per consigli, suggerimenti, eventuali errori o altro
Esercizi di Cinematica
 Esercizio 1 Esercizi di Cinematica Esercitazioni di Fisica LA per ingegneri - A.A. 2007-2008 Data la legge oraria: s(t) = a t 3 b t + c (con a = 3 ms 3, b = 2 ms 1, c = 1 m) calcolare la posizione e la
Esercizio 1 Esercizi di Cinematica Esercitazioni di Fisica LA per ingegneri - A.A. 2007-2008 Data la legge oraria: s(t) = a t 3 b t + c (con a = 3 ms 3, b = 2 ms 1, c = 1 m) calcolare la posizione e la
FISICA. MECCANICA: La Cinematica bidimensionale. Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica
 FISICA MECCANICA: La Cinematica bidimensionale Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica Il moto nel piano INTRODUZIONE I moti possono svolgersi anche su un piano, in due dimensioni
FISICA MECCANICA: La Cinematica bidimensionale Autore: prof. Pappalardo Vincenzo docente di Matematica e Fisica Il moto nel piano INTRODUZIONE I moti possono svolgersi anche su un piano, in due dimensioni
Oscillazioni. Si produce un oscillazione quando un sistema viene perturbato rispetto a una posizione di equilibrio stabile
 Oscillazioni Si produce un oscillazione quando un sistema viene perturbato rispetto a una posizione di equilibrio stabile Caratteristica più evidente del moto oscillatorio è di essere un moto periodico,
Oscillazioni Si produce un oscillazione quando un sistema viene perturbato rispetto a una posizione di equilibrio stabile Caratteristica più evidente del moto oscillatorio è di essere un moto periodico,
Forza centrifuga. Funi e molle. Equazioni del moto
 La forza è un particolare tipo di forza apparente, presente quando il sistema non inerziale (SNI) è in moto rototraslatorio rispetto ad un sistema di riferimento inerziale (SI). Nel moto rototraslatorio
La forza è un particolare tipo di forza apparente, presente quando il sistema non inerziale (SNI) è in moto rototraslatorio rispetto ad un sistema di riferimento inerziale (SI). Nel moto rototraslatorio
Forza viscosa. Abbiamo visto che la forza di attrito in un fluido può essere modellizzata come: F A = kv legge di Stokes (1) F = kv 2 v v
 F = kv 2 v v") Forza viscosa 1 / 44 Abbiamo visto che la forza di attrito in un fluido può essere modellizzata come: F A = kv legge di Stokes (1) F = kv 2 v v attrito turbolento (2) Per entrambi i modelli l equazione
Forza viscosa 1 / 44 Abbiamo visto che la forza di attrito in un fluido può essere modellizzata come: F A = kv legge di Stokes (1) F = kv 2 v v attrito turbolento (2) Per entrambi i modelli l equazione
(d) mostrare che l energia meccanica si conserva; (e) utilizzando la conservazione dell energia calcolare l altezza massima dal suolo;
 mostrare che l energia meccanica si conserva; (e) utilizzando la conservazione dell energia calcolare l altezza massima dal suolo;") 1 Esercizio Un sasso di massa m.5 Kg viene lanciato dalla cima di una torre alta h 2 m con velocità iniziale di modulo v 12 m/s, ad un angolo ϕ 6 o rispetto all orizzontale. La torre si trova in prossimità
1 Esercizio Un sasso di massa m.5 Kg viene lanciato dalla cima di una torre alta h 2 m con velocità iniziale di modulo v 12 m/s, ad un angolo ϕ 6 o rispetto all orizzontale. La torre si trova in prossimità
Oscillazioni. Si produce un oscillazione quando un sistema viene perturbato rispetto a una posizione di equilibrio stabile
 Oscillazioni Si produce un oscillazione quando un sistema viene perturbato rispetto a una posizione di equilibrio stabile Caratteristica più evidente del moto oscillatorio è di essere un moto periodico,
Oscillazioni Si produce un oscillazione quando un sistema viene perturbato rispetto a una posizione di equilibrio stabile Caratteristica più evidente del moto oscillatorio è di essere un moto periodico,
CINEMATICA DEL PUNTO MATERIALE: MOTI RETTILINEI E INTRODUZIONE AL MOTO IN PIÙ DIMENSIONI PROF. FRANCESCO DE PALMA
 CINEMATICA DEL PUNTO MATERIALE: MOTI RETTILINEI E INTRODUZIONE AL MOTO IN PIÙ DIMENSIONI PROF. FRANCESCO DE PALMA Sommario INTRODUZIONE ALLA CINEMATICA... 3 MOTO RETTILINEO UNIFORMEMENTE ACCELERATO...
CINEMATICA DEL PUNTO MATERIALE: MOTI RETTILINEI E INTRODUZIONE AL MOTO IN PIÙ DIMENSIONI PROF. FRANCESCO DE PALMA Sommario INTRODUZIONE ALLA CINEMATICA... 3 MOTO RETTILINEO UNIFORMEMENTE ACCELERATO...
Esercizio 5. Risoluzione
 Esercizio 1 Un sasso viene lasciato cadere da fermo in un pozzo; il rumore dell impatto con l acqua giunge all orecchio del lanciatore dopo un intervallo di tempo t* = 10s. Sapendo che il suono si propaga
Esercizio 1 Un sasso viene lasciato cadere da fermo in un pozzo; il rumore dell impatto con l acqua giunge all orecchio del lanciatore dopo un intervallo di tempo t* = 10s. Sapendo che il suono si propaga
Cinematica: considerazioni generali
 Cinematica: considerazioni generali La cinematica studia la descrizione del moto dei corpi (cioè la posizione di un oggetto nello spazio e nel tempo) senza considerare le cause che hanno prodotto il moto.
Cinematica: considerazioni generali La cinematica studia la descrizione del moto dei corpi (cioè la posizione di un oggetto nello spazio e nel tempo) senza considerare le cause che hanno prodotto il moto.
Lezione 3 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Accelerazione di gravità Moto di un proiettile
 Corsi di Laurea in Scienze motorie - Classe L- (D.M. 70/04) Prof. Maria Giovanna Guerrisi Dr. Andrea Malizia 1 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Accelerazione
Corsi di Laurea in Scienze motorie - Classe L- (D.M. 70/04) Prof. Maria Giovanna Guerrisi Dr. Andrea Malizia 1 Cinematica Velocità Moto uniforme Accelerazione Moto uniformemente accelerato Accelerazione
Cinematica. Descrizione dei moti
 Cinematica Descrizione dei moti Moto di un punto materiale Nella descrizione del moto di un corpo (cinematica) partiamo dal caso più semplice: il punto materiale, che non ha dimensioni proprie. y. P 2
Cinematica Descrizione dei moti Moto di un punto materiale Nella descrizione del moto di un corpo (cinematica) partiamo dal caso più semplice: il punto materiale, che non ha dimensioni proprie. y. P 2
Esempi Esercizi dʼesame
 Esempi Esercizi dʼesame Calcolo vettoriale 1) Dati i due versori â ed ˆb formanti un angolo θ ab = 45 si calcoli il prodotto scalare dei vettori v 1 = â 3 ˆb e v 2 = 2â + ˆb. (R: 1 5 2 2 ) 2) Dati i due
Esempi Esercizi dʼesame Calcolo vettoriale 1) Dati i due versori â ed ˆb formanti un angolo θ ab = 45 si calcoli il prodotto scalare dei vettori v 1 = â 3 ˆb e v 2 = 2â + ˆb. (R: 1 5 2 2 ) 2) Dati i due
Biomeccanica. Cinematica Dinamica Statica dei corpi rigidi Energia e principi di conservazione
 Biomeccanica Cinematica Dinamica Statica dei corpi rigidi Energia e principi di conserazione Cinematica: posizione e traiettoria z Posizione: definita da : modulo, direzione, erso ettore s unità di misura
Biomeccanica Cinematica Dinamica Statica dei corpi rigidi Energia e principi di conserazione Cinematica: posizione e traiettoria z Posizione: definita da : modulo, direzione, erso ettore s unità di misura
Introduzione MOTO V T T OIN RTRE I DIMENSIONI g. bonomi fisica sperimentale (mecc., elettrom.)
") Introduzione La spinta all uomo proiettile è data da una molla o da aria compressa (il rumore ed il fumo sono effetti scenici). Come si fa a piazzare la rete nel punto giusto? La descrizione del moto tramite
Introduzione La spinta all uomo proiettile è data da una molla o da aria compressa (il rumore ed il fumo sono effetti scenici). Come si fa a piazzare la rete nel punto giusto? La descrizione del moto tramite
CINEMATICA BIDIMENSIONALE
 CINEMATICA BIDIMENSIONALE CdL Farmacia Corso (A - E) A.A. 2015/16 1 Dott. Silvia Rainò Università di Bari Email: silvia.raino@ba.infn.it silvia.raino@uniba.it Pagine web: www.ba.infn.it/sraino Ufficio:
CINEMATICA BIDIMENSIONALE CdL Farmacia Corso (A - E) A.A. 2015/16 1 Dott. Silvia Rainò Università di Bari Email: silvia.raino@ba.infn.it silvia.raino@uniba.it Pagine web: www.ba.infn.it/sraino Ufficio:
Moto curvilineo piano in un sistema di coordinate polari Or
 Moto curvilineo piano in un sistema di coordinate polari Or Legge oraria del moto curvilineo piano in un sistema Or,t: r(t) = r(t) u r (t). Derivazione del vettore velocità istantanea v(t) = dr(t)/dt:
Moto curvilineo piano in un sistema di coordinate polari Or Legge oraria del moto curvilineo piano in un sistema Or,t: r(t) = r(t) u r (t). Derivazione del vettore velocità istantanea v(t) = dr(t)/dt:
Moto piano: componenti polari dell accelerazione Scriviamo l accelerazione nelle sue componenti polari (cosa utile per i moti circolari) ds dt = v R
 ds dt = v R") 1 2.2-ACCELERAZIONE NEL MOTO PIANO 1 2.2-accelerazione nel moto piano Moto piano: componenti polari dell accelerazione Scriviamo l accelerazione nelle sue componenti polari (cosa utile per i moti circolari)
1 2.2-ACCELERAZIONE NEL MOTO PIANO 1 2.2-accelerazione nel moto piano Moto piano: componenti polari dell accelerazione Scriviamo l accelerazione nelle sue componenti polari (cosa utile per i moti circolari)
Dinamica del punto materiale
 Dinamica del punto materiale Formule fondamentali L. P. 5 Aprile 2010 N.B.: Le relazioni riportate sono valide in un sistema di riferimento inerziale. Princìpi della dinamica Secondo principio della dinamica
Dinamica del punto materiale Formule fondamentali L. P. 5 Aprile 2010 N.B.: Le relazioni riportate sono valide in un sistema di riferimento inerziale. Princìpi della dinamica Secondo principio della dinamica
Serway, Jewett Principi di Fisica IV Ed. Capitolo 3. Serway, Jewett Principi di Fisica, IV Ed. Capitolo 3
 Serway, Jewett Principi di Fisica IV Ed. Capitolo 3 Moti in due dimensioni Caso bidimensionale: tutte le grandezze viste fino ad ora (posizione, velocità, accelerazione devono essere trattate come vettori).
Serway, Jewett Principi di Fisica IV Ed. Capitolo 3 Moti in due dimensioni Caso bidimensionale: tutte le grandezze viste fino ad ora (posizione, velocità, accelerazione devono essere trattate come vettori).
Esercizi di dinamica
 Esercizi di dinamica Esercitazioni di Fisica LA per ingegneri - A.A. 2003-2004 M F1, m v0 α F2, M α F3 Esercizio 1 Un blocco di massa M = 1.20 kg (figura F1) si trova in equilibrio appoggiato su una molla
Esercizi di dinamica Esercitazioni di Fisica LA per ingegneri - A.A. 2003-2004 M F1, m v0 α F2, M α F3 Esercizio 1 Un blocco di massa M = 1.20 kg (figura F1) si trova in equilibrio appoggiato su una molla
CINEMATICA a.s.2007/08 Classe III C Scuola Media Sasso Marconi. SINTESI E APPUNTI Prof.ssa Elena Spera
 CINEMATICA a.s.2007/08 Classe III C Scuola Media Sasso Marconi SINTESI E APPUNTI Prof.ssa Elena Spera 1 SISTEMI DI RIFERIMENTO Il moto è relatio Ogni moto a studiato dopo aere fissato un sistema di riferimento,
CINEMATICA a.s.2007/08 Classe III C Scuola Media Sasso Marconi SINTESI E APPUNTI Prof.ssa Elena Spera 1 SISTEMI DI RIFERIMENTO Il moto è relatio Ogni moto a studiato dopo aere fissato un sistema di riferimento,
DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA
 DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA Sia dato un sistema con vincoli lisci, bilaterali e FISSI. Ricaviamo, dall equazione simbolica della dinamica, il teorema
DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA Sia dato un sistema con vincoli lisci, bilaterali e FISSI. Ricaviamo, dall equazione simbolica della dinamica, il teorema
Università del Sannio
 Università del Sannio Corso di Fisica 1 Lezione 6 Dinamica del punto materiale II Prof.ssa Stefania Petracca 1 Lavoro, energia cinetica, energie potenziali Le equazioni della dinamica permettono di determinare
Università del Sannio Corso di Fisica 1 Lezione 6 Dinamica del punto materiale II Prof.ssa Stefania Petracca 1 Lavoro, energia cinetica, energie potenziali Le equazioni della dinamica permettono di determinare
P = mg; F N = mg cosα; F A = µ d F N = µ d mg cosα.
 Esercizio 1 a) Fissiamo un asse di riferimento x parallelo al piano inclinato, diretto verso l alto e con origine nella posizione iniziale del corpo alla base del piano. Sia m la massa del corpo, P la
Esercizio 1 a) Fissiamo un asse di riferimento x parallelo al piano inclinato, diretto verso l alto e con origine nella posizione iniziale del corpo alla base del piano. Sia m la massa del corpo, P la
UNIVERSITÀ DEGLI STUDI DI TERAMO
 UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN TUTELA E BENESSERE ANIMALE Corso di : FISICA MEDICA A.A. 015 /016 Docente: Dott. Chiucchi Riccardo mail:rchiucchi@unite.it Medicina Veterinaria: CFU
UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN TUTELA E BENESSERE ANIMALE Corso di : FISICA MEDICA A.A. 015 /016 Docente: Dott. Chiucchi Riccardo mail:rchiucchi@unite.it Medicina Veterinaria: CFU
ds dt = v R per cui si ottiene RûN = a T + a N RûN accelerazione centripeta e a c =
 2 2.3-MOTO-CIRCOLARE UNIFORME 1 2.2-accelerazione nel moto piano Moto piano: componenti intrinseche dell accelerazione Scriviamo l accelerazione nelle sue componenti partendo dalle coordinate intrinseche
2 2.3-MOTO-CIRCOLARE UNIFORME 1 2.2-accelerazione nel moto piano Moto piano: componenti intrinseche dell accelerazione Scriviamo l accelerazione nelle sue componenti partendo dalle coordinate intrinseche
Lavoro. F=F(r) e in generale una funzione della posizione e
 e in generale una funzione della posizione e") Lavoro Consideriamo un corpo che si sposta da un punto ad un punto lungo una certa traiettoria l e sia F una forza agente sul corpo. Definiamo lavoro fatto dalla forza F sul corpo lungo la traiettoria
Lavoro Consideriamo un corpo che si sposta da un punto ad un punto lungo una certa traiettoria l e sia F una forza agente sul corpo. Definiamo lavoro fatto dalla forza F sul corpo lungo la traiettoria
Prova Parziale 2 Su un piano inclinato con un angolo θ = 60 rispetto all orizzontale è posto un blocco di peso P = 1.0 N. La forza di contatto F che i
 Su un piano inclinato con un angolo θ = 60 rispetto all orizzontale è posto un blocco di peso P = 1.0 N. La forza di contatto F che il piano esercita sul blocco vale in modulo: F = 9.8 N F = 0.5 N F =
Su un piano inclinato con un angolo θ = 60 rispetto all orizzontale è posto un blocco di peso P = 1.0 N. La forza di contatto F che il piano esercita sul blocco vale in modulo: F = 9.8 N F = 0.5 N F =
Nello schema seguente sono riportate le forze che agiscono sul sistema:
 CORPI COLLEGATI 1) Due blocchi sono collegati tra di loro come in figura. La massa di m1 è 4,0 kg e quella di m è di 1,8 kg. Il coefficiente di attrito dinamico tra m1 e il tavolo è μ d = 0,. Determinare
CORPI COLLEGATI 1) Due blocchi sono collegati tra di loro come in figura. La massa di m1 è 4,0 kg e quella di m è di 1,8 kg. Il coefficiente di attrito dinamico tra m1 e il tavolo è μ d = 0,. Determinare
Esercizi aprile Sommario Conservazione dell energia e urti a due corpi.
 Esercizi 2.04.8 3 aprile 208 Sommario Conservazione dell energia e urti a due corpi. Conservazione dell energia. Esercizio Il motore di un ascensore solleva con velocità costante la cabina contenente quattro
Esercizi 2.04.8 3 aprile 208 Sommario Conservazione dell energia e urti a due corpi. Conservazione dell energia. Esercizio Il motore di un ascensore solleva con velocità costante la cabina contenente quattro
Attrito statico e attrito dinamico
 Forza di attrito La presenza delle forze di attrito fa parte dell esperienza quotidiana. Se si tenta di far scorrere un corpo su una superficie, si sviluppa una resistenza allo scorrimento detta forza
Forza di attrito La presenza delle forze di attrito fa parte dell esperienza quotidiana. Se si tenta di far scorrere un corpo su una superficie, si sviluppa una resistenza allo scorrimento detta forza
P = r. o + r. O + ω r (1)
") 1 5.1-MOTI RELATIVI Parte I 5.1-Moti relativi-cap5 1 5.1-Moti relativi Teorema delle velocità relative Riprendiamo l impostazione tracciata nel paragrafo 2.6 (moti relativi 2-D) e consideriamo un sistema
1 5.1-MOTI RELATIVI Parte I 5.1-Moti relativi-cap5 1 5.1-Moti relativi Teorema delle velocità relative Riprendiamo l impostazione tracciata nel paragrafo 2.6 (moti relativi 2-D) e consideriamo un sistema
Dinamica Rotazionale
 Dinamica Rotazionale Richiamo: cinematica rotazionale, velocità e accelerazione angolare Energia cinetica rotazionale: momento d inerzia Equazione del moto rotatorio: momento delle forze Leggi di conservazione
Dinamica Rotazionale Richiamo: cinematica rotazionale, velocità e accelerazione angolare Energia cinetica rotazionale: momento d inerzia Equazione del moto rotatorio: momento delle forze Leggi di conservazione
La fisica di Feynmann Meccanica
 La fisica di Feynmann Meccanica 1.1 CINEMATICA Moto di un punto Posizione r = ( x, y, z ) = x i + y j + z k Velocità v = dr/dt v = vx 2 + vy 2 + vz 2 Accelerazione a = d 2 r/dt 2 Moto rettilineo Spazio
La fisica di Feynmann Meccanica 1.1 CINEMATICA Moto di un punto Posizione r = ( x, y, z ) = x i + y j + z k Velocità v = dr/dt v = vx 2 + vy 2 + vz 2 Accelerazione a = d 2 r/dt 2 Moto rettilineo Spazio
approfondimento Cinematica ed energia di rotazione equilibrio statico di un corpo esteso conservazione del momento angolare
 approfondimento Cinematica ed energia di rotazione equilibrio statico di un corpo esteso conservazione del momento angolare Moto di rotazione Rotazione dei corpi rigidi ϑ(t) ω z R asse di rotazione v m
approfondimento Cinematica ed energia di rotazione equilibrio statico di un corpo esteso conservazione del momento angolare Moto di rotazione Rotazione dei corpi rigidi ϑ(t) ω z R asse di rotazione v m
Lavoro ed energia. Lavoro di una forza Teorema dell energia cinetica Forze conservative Conservazione dell energia
 Lavoro ed energia Lavoro di una forza Teorema dell energia cinetica Forze conservative Conservazione dell energia Lavoro di una forza Consideriamo una forza F applicata ad un punto materiale P che si sposti
Lavoro ed energia Lavoro di una forza Teorema dell energia cinetica Forze conservative Conservazione dell energia Lavoro di una forza Consideriamo una forza F applicata ad un punto materiale P che si sposti
PIANO DELLE UDA NUCLEI ESSENZIALI classe terza liceo linguistico, scienze umane e scienze umane opz. ec. sociale
 I QUADRIMESTRE PIANO DELLE UDA NUCLEI ESSENZIALI classe terza liceo linguistico, scienze umane e scienze umane opz. ec. sociale E UDA n. 1 GRANDEZZE E MISURE Distinguere tra tipi di grandezze fisiche.
I QUADRIMESTRE PIANO DELLE UDA NUCLEI ESSENZIALI classe terza liceo linguistico, scienze umane e scienze umane opz. ec. sociale E UDA n. 1 GRANDEZZE E MISURE Distinguere tra tipi di grandezze fisiche.
Esercizio 5. Risoluzione
 Esercizio 1 Un sasso viene lasciato cadere da fermo in un pozzo; il rumore dell impatto con l acqua giunge all orecchio del lanciatore dopo un intervallo di tempo t* = 10s. Sapendo che il suono si propaga
Esercizio 1 Un sasso viene lasciato cadere da fermo in un pozzo; il rumore dell impatto con l acqua giunge all orecchio del lanciatore dopo un intervallo di tempo t* = 10s. Sapendo che il suono si propaga
LICEO SCIENTIFICO STATALE MICHELANGELO CAGLIARI
 LICEO SCIENTIFICO STATALE MICHELANGELO CAGLIARI PROGRAMMA DI MATEMATICA CLASSE III B A. S. 2016-2017 PROGRAMMA DI MATEMATICA RICHIAMI su equazioni di primo e secondo grado, sistemi di due equazioni in
LICEO SCIENTIFICO STATALE MICHELANGELO CAGLIARI PROGRAMMA DI MATEMATICA CLASSE III B A. S. 2016-2017 PROGRAMMA DI MATEMATICA RICHIAMI su equazioni di primo e secondo grado, sistemi di due equazioni in
LE FORZE E IL MOTO. Il moto lungo un piano inclinato
 LE FORZE E IL MOTO Il moto lungo un piano inclinato Il moto di caduta lungo un piano inclinato un moto uniformemente accelerato in cui l accelerazione è diretta parallelamente al piano (verso il basso)
LE FORZE E IL MOTO Il moto lungo un piano inclinato Il moto di caduta lungo un piano inclinato un moto uniformemente accelerato in cui l accelerazione è diretta parallelamente al piano (verso il basso)
Analisi Matematica 2. Curve e integrali curvilinei. Curve e integrali curvilinei 1 / 29
 Analisi Matematica 2 Curve e integrali curvilinei Curve e integrali curvilinei 1 / 29 Curve in R 2 e R 3 Intuitivamente: una curva é un insieme di punti nello spazio in cui una particella puó muoversi
Analisi Matematica 2 Curve e integrali curvilinei Curve e integrali curvilinei 1 / 29 Curve in R 2 e R 3 Intuitivamente: una curva é un insieme di punti nello spazio in cui una particella puó muoversi
Esercitazione 1. Soluzione
 Esercitazione 1 Esercizio 1 - Moto rettilineo uniforme Un bagnino B è sulla spiaggia a distanza d B = 50 m dalla riva e deve soccorrere un bagnante H che è in acqua a d H = 100 m dalla riva. La distanza
Esercitazione 1 Esercizio 1 - Moto rettilineo uniforme Un bagnino B è sulla spiaggia a distanza d B = 50 m dalla riva e deve soccorrere un bagnante H che è in acqua a d H = 100 m dalla riva. La distanza
Attrito statico e attrito dinamico
 Forza di attrito La presenza delle forze di attrito fa parte dell esperienza quotidiana. Se si tenta di far scorrere un corpo su una superficie, si sviluppa una resistenza allo scorrimento detta forza
Forza di attrito La presenza delle forze di attrito fa parte dell esperienza quotidiana. Se si tenta di far scorrere un corpo su una superficie, si sviluppa una resistenza allo scorrimento detta forza
Meccanica Dinamica del punto materiale
 Meccanica 13-14 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente y m N mg mg
Meccanica 13-14 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente y m N mg mg
Programma di fisica. Classe 2^ sez. R A. S. 2013/2014. Docente: prof. ssa Laganà Filomena Donatella
 Programma di fisica. Classe 2^ sez. R A. S. 2013/2014 Docente: prof. ssa Laganà Filomena Donatella MODULO 1: STRUMENTI MATEMATICI. Definizione di radiante. Misura in radianti di angoli notevoli. Introduzione
Programma di fisica. Classe 2^ sez. R A. S. 2013/2014 Docente: prof. ssa Laganà Filomena Donatella MODULO 1: STRUMENTI MATEMATICI. Definizione di radiante. Misura in radianti di angoli notevoli. Introduzione
Appunti sul moto circolare uniforme e sul moto armonico- Fabbri Mariagrazia
 Moto circolare uniforme Il moto circolare uniforme è il moto di un corpo che si muove con velocità di modulo costante lungo una traiettoria circolare di raggio R. Il tempo impiegato dal corpo per compiere
Moto circolare uniforme Il moto circolare uniforme è il moto di un corpo che si muove con velocità di modulo costante lungo una traiettoria circolare di raggio R. Il tempo impiegato dal corpo per compiere
Nozioni di meccanica classica
 Nozioni di meccanica classica CORSO DI LAUREA IN TECNICHE DI RADIOLOGIA MEDICA, PER IMMAGINI E RADIOTERAPIA - Prof. Marco Maggiora Jacopo Pellegrino - jacopo.pellegrino@infn.it Introduzione Introduzione
Nozioni di meccanica classica CORSO DI LAUREA IN TECNICHE DI RADIOLOGIA MEDICA, PER IMMAGINI E RADIOTERAPIA - Prof. Marco Maggiora Jacopo Pellegrino - jacopo.pellegrino@infn.it Introduzione Introduzione
Corso di laurea in Informatica 1 Compitino di Fisica COMPITO B 26 Aprile Corsi A e B (docenti: Colò, Maugeri)
") Firma Corso di laurea in Informatica 1 Compitino di Fisica COMPITO B 26 Aprile 2007 Corsi A e B (docenti: Colò, Maugeri) Cognome: Nome: Matricola: Pos: 1) Si consideri il sistema rappresentato in figura
Firma Corso di laurea in Informatica 1 Compitino di Fisica COMPITO B 26 Aprile 2007 Corsi A e B (docenti: Colò, Maugeri) Cognome: Nome: Matricola: Pos: 1) Si consideri il sistema rappresentato in figura
CINEMATICA DEL PUNTO MATERIALE
 CINEMATICA DEL PUNTO MATERIALE Regole di derivazione per il prodotto scalare e per il prodotto vettore Sia v funzione di un parametro reale t, t.c. 5 v : R R 3 t 7 v (t). (1) Proprietà: 1. Limite. Il concetto
CINEMATICA DEL PUNTO MATERIALE Regole di derivazione per il prodotto scalare e per il prodotto vettore Sia v funzione di un parametro reale t, t.c. 5 v : R R 3 t 7 v (t). (1) Proprietà: 1. Limite. Il concetto
Monaco Alfonso. Cinematica 2d
 Monaco Alfonso Cinematica 2d 1 Moto parabolico n n n Il moto nelle direzioni e possono essere separati Nella direzione il moto è rettilineo uniforme Nella direzione il moto è uniformemente accelerato (per
Monaco Alfonso Cinematica 2d 1 Moto parabolico n n n Il moto nelle direzioni e possono essere separati Nella direzione il moto è rettilineo uniforme Nella direzione il moto è uniformemente accelerato (per
IISS Enzo Ferrari, Roma. Plesso Vallauri, Liceo delle Scienze Applicate. Programma svolto
 IISS Enzo Ferrari, Roma Plesso Vallauri, Liceo delle Scienze Applicate Programma svolto ANNO SCOLASTICO: 2015-2016 DISCIPLINA: FISICA CLASSE: 2ª F DOCENTE: MICHAEL ROTONDO Richiami sulle grandezze fisiche,
IISS Enzo Ferrari, Roma Plesso Vallauri, Liceo delle Scienze Applicate Programma svolto ANNO SCOLASTICO: 2015-2016 DISCIPLINA: FISICA CLASSE: 2ª F DOCENTE: MICHAEL ROTONDO Richiami sulle grandezze fisiche,
approfondimento Lavoro ed energia
 approfondimento Lavoro ed energia Lavoro compiuto da una forza costante W = F. d = F d cosθ dimensioni [W] = [ML T - ] Unità di misura del lavoro N m (Joule) in MKS dine cm (erg) in cgs N.B. Quando la
approfondimento Lavoro ed energia Lavoro compiuto da una forza costante W = F. d = F d cosθ dimensioni [W] = [ML T - ] Unità di misura del lavoro N m (Joule) in MKS dine cm (erg) in cgs N.B. Quando la
Esercitazioni di Fisica Corso di Laurea in Biotecnologie e Geologia
 Esercitazioni di Corso di Laurea in Biotecnologie e Geologia Ninfa Radicella Università del Sannio 6 Aprile 2016 Moto in due dimensioni Cinematica delle particelle in moto su un piano Cosa ci serve: Vettore
Esercitazioni di Corso di Laurea in Biotecnologie e Geologia Ninfa Radicella Università del Sannio 6 Aprile 2016 Moto in due dimensioni Cinematica delle particelle in moto su un piano Cosa ci serve: Vettore
Il moto uniformemente accelerato. Prof. E. Modica
 Il moto uniformemente accelerato! Prof. E. Modica www.galois.it La velocità cambia... Quando andiamo in automobile, la nostra velocità non si mantiene costante. Basta pensare all obbligo di fermarsi in
Il moto uniformemente accelerato! Prof. E. Modica www.galois.it La velocità cambia... Quando andiamo in automobile, la nostra velocità non si mantiene costante. Basta pensare all obbligo di fermarsi in
Angolo polare, versori radiale e trasverso
 Angolo polare, versori radiale e trasverso Desideriamo descrivere il moto di un corpo puntiforme che ruota su una circonferenza attorno ad un asse fisso. Nella figura l asse di rotazione coincide con l
Angolo polare, versori radiale e trasverso Desideriamo descrivere il moto di un corpo puntiforme che ruota su una circonferenza attorno ad un asse fisso. Nella figura l asse di rotazione coincide con l
SOLUZIONI Diagramma delle forze
 - ESERCIZIO 1 - Un'autovettura di massa m percorre una curva di raggio R e angolo θ a velocità costante in modulo. Se il coefficiente di attrito statico tra pneumatici e asfalto è pari a µs, si determini:
- ESERCIZIO 1 - Un'autovettura di massa m percorre una curva di raggio R e angolo θ a velocità costante in modulo. Se il coefficiente di attrito statico tra pneumatici e asfalto è pari a µs, si determini: