MATLAB (MATrix LABoratory) è un linguaggio di programmazione per applicazioni scientifiche (elaborazione numerica dei segnali, progetto di
|
|
|
- Bruno Vanni
- 6 anni fa
- Visualizzazioni
Transcript
1 MATLAB
 MATLAB è un interprete di comandi.")
2 MATLAB (MATrix LABoratory) è un linguaggio di programmazione per applicazioni scientifiche (elaborazione numerica dei segnali, progetto di simulatori, sintesi di sistemi di controllo, ecc.) MATLAB è un interprete di comandi. I comandi possono essere forniti interattivamente o contenuti in files su disco (M-files) Comprende un vasto set di funzioni predefinite e numerose librerie (toolbox) per svariate applicazioni Le potenzialità di MATLAB possono essere facilmente estese (è semplice creare nuovi toolbox) E' possibile convertire un programma MATLAB in codice C e C++ in modo automatico

3 Come appare Matlab?
4 Matlab come Calcolatrice
5 Definizione Variabili

6 Workspace Tutte le variabile definite o calcolate vengono tenute automaticamente in memoria e posso essere richiamate successivamente.

7 Lettura e scrittura dati su FILE
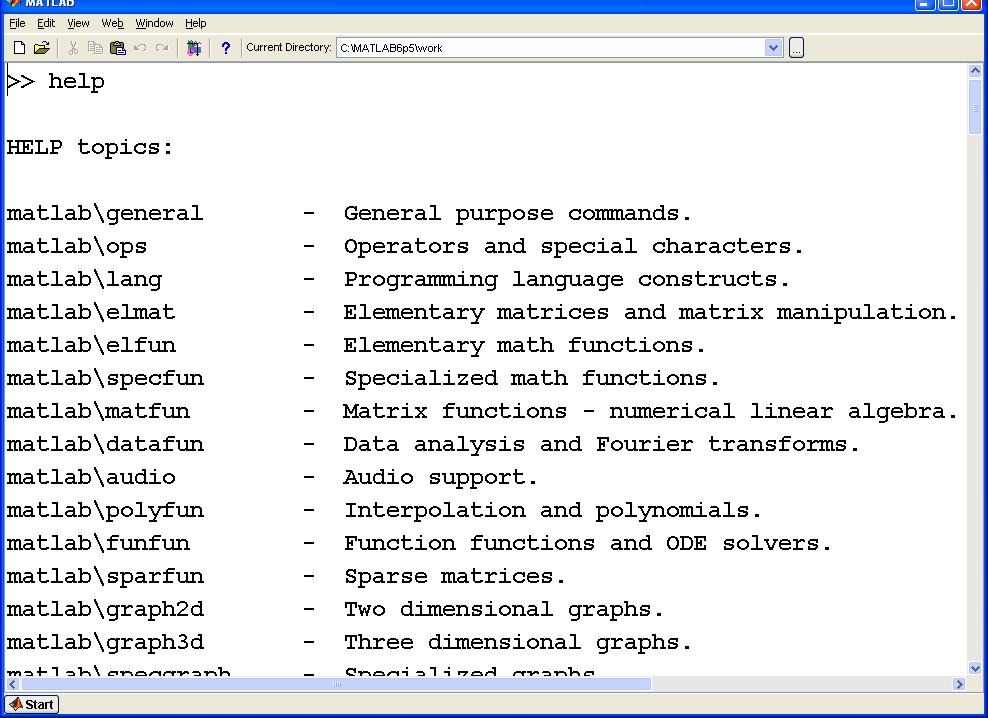
8 Help

9 Help topic
10 ALCUNE ISTRUZIONI DI USO COMUNE >>help richiama l help in linea help comando visualizza l help relativo al comando indicato >>who/whos >> dir corrente elencano le variabili in uso elenca i files contenuti nella directory >>clear all elimina tutte le variabili della sessione corrente >>clear var1 var2 workspace elimina le variabili var1 e var2 dal
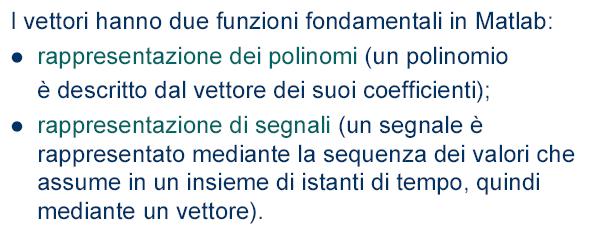
11 VETTORI

12

13 Vettore Colonna
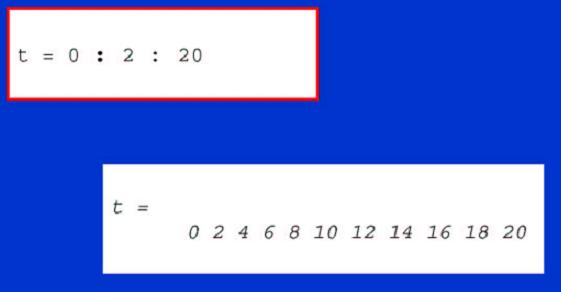
14 Vettori
15 Vettori
16 Vettori

17 Funzioni Standard e costanti


18 Funzioni Standard e costanti
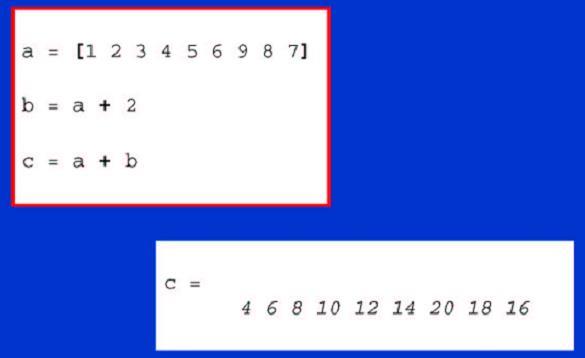
19 Funzioni con argomenti Vettoriali
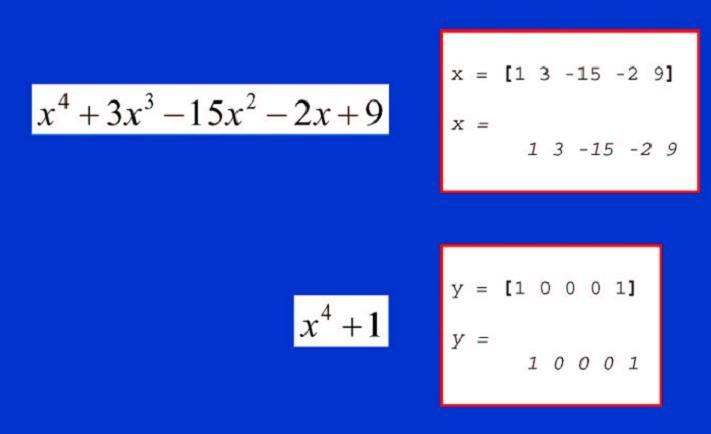
20 Polinomi
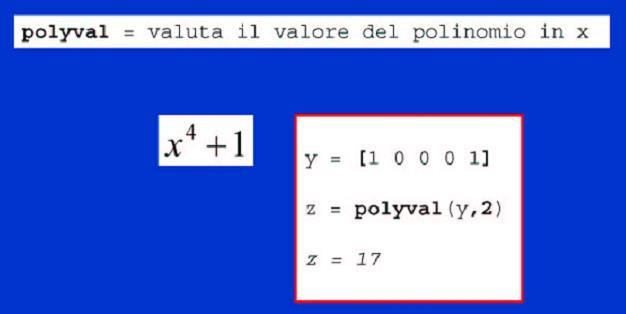
21 Polinomi
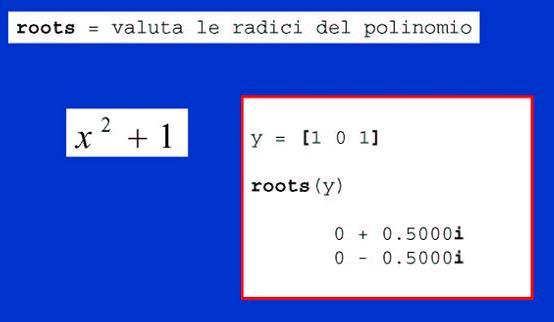
22 Polinomi
23
24 Prodotto tra Polinomi
25 M-FILE

26 Programma in M-file
27 Programmazione in MATLAB
28 Funzioni

29 Esempio di funzione che calcola statistica A line at the top of a function M-file contains the syntax definition. The name of a function, as defined in the first line of the M-file, should be the same as the name of the file without the.m extension.
30 Matrici
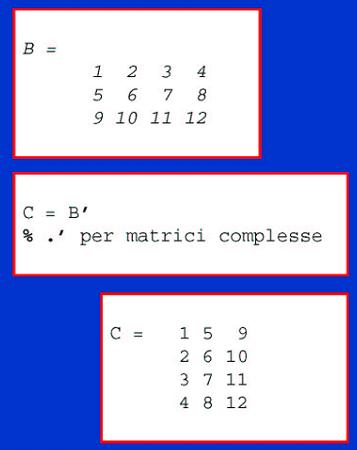
31 Matrici
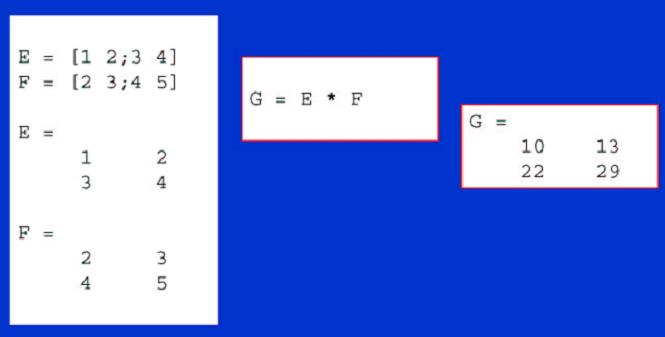
32 Matrici
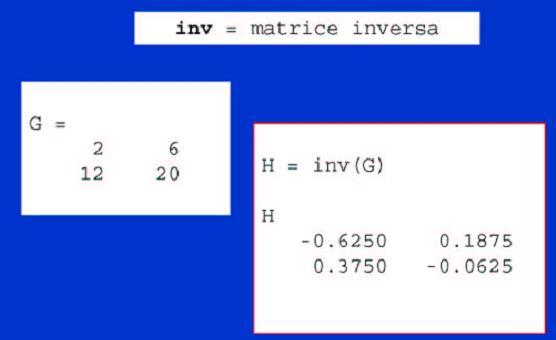
33 Matrici
34 WildCard
35
36
37 Estrazione Sottomatrice
38

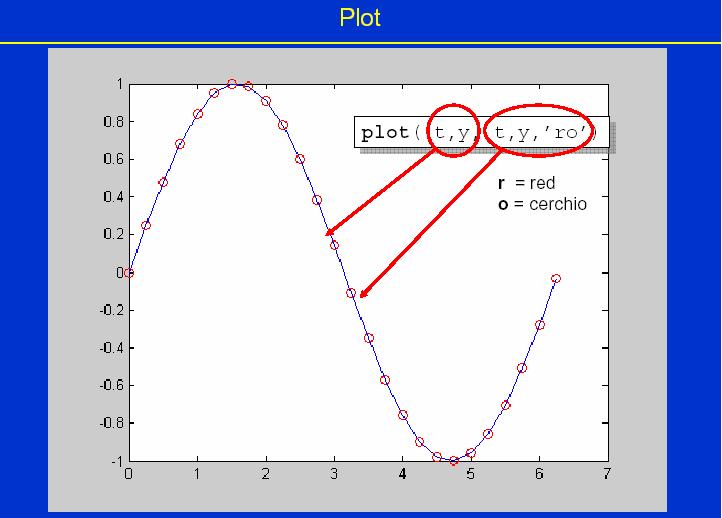
39 La Grafica Matlab

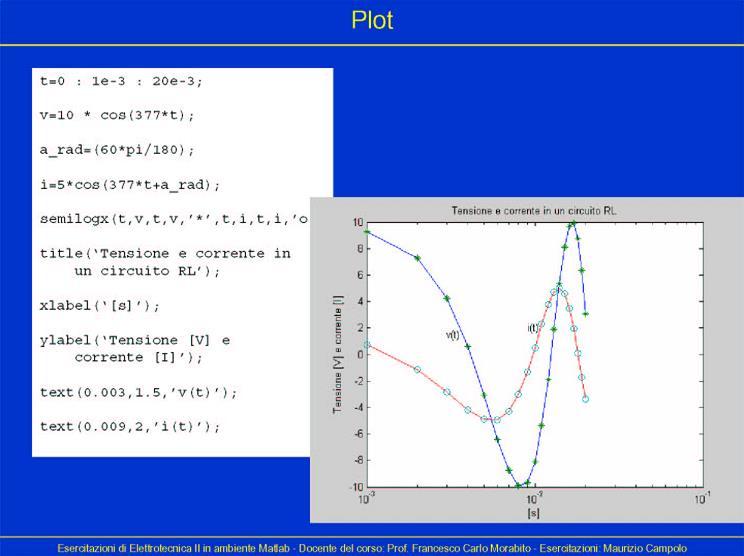
40 Alcuni parametri dei Grafici

41
42
43

44 Salvataggio figura su file
45
46
47
48

49
50
51

52

53 Control System Toolbox

54

55

56
57
58 Da TF a State Space
59 Da TF a State Space Gs () 3 2 s 160 s 12s 300s 100
60 Se il modello presenta un ritardo finito, questo può essere incluso nel modo seguente: G s 2 2 s 2e 0.5s 2s 2 >>sys=tf(2,[1 2 2], InputDelay,0.5);

61

62 DIAGRAMMI DI BODE

63
64
65 Altra Modalità W s G ( s)* G ( s) 1 G ( s )* G ( s )* G ( s )
66
67 Cancellazioni G 1 () s G 3 () s 2 () s G3 a () s

68

69 Amplitude Risposta Libera 1.5 Response to Initial Conditions
70 Risposta Forzata
71 Risposta Forzata Amplitude 1 Linear Simulation Results Time (sec)
72 Risposta Completa Amplitude 1 Linear Simulation Results Time (sec)

73

74 Nel caso in cui si voglia valutare la risposa al GRADINO Amplitude 2 G s s 2 2s 2 Step Response Time (sec)
75 E possibile visualizzare le caratteristiche principali della risposta al gradino Amplitude Step Response System: sys Peak amplitude: 1.04 Overshoot (%): 4.31 At time (sec): Time (sec)
76 Amplitude Nel caso in cui si voglia valutare la risposa all IMPULSO 0.7 Impulse Response Time (sec)
77 DIAGRAMMI DI BODE Il sistema Lineare può essere assegnato in uno delle 2 forme possibili: sys=tf(num,den); sys=zpk([zeri],[poli]); Si stabilisce decide l intervallo di frequenze per il quale si vuole disegnare il diagramma di Bode o Nyquist (w min <w<w max ). Si definisce un vettore w contenete l insieme ordinato delle frequenze che si vogliono graficare con il comando logspace: w 10 ex: 300 punti nell intevallo : w=logspace(-2,3,300)
78 Calcolo dei residui
79 1.5( s 4) 3 G s ( s 2)( s 3)( s 1) Calcolo dei residui R R R R G s 2 3 ( s 2) ( s 3) ( s 1) ( s 1) ( s 1) R
80 Amplitude 3 MODI NATURALI Time (sec) 2 3 G s ( s 2) ( s 3) ( s 1) ( s 1) ( s 1)
81 ESEMPIO (s + 1) W(s) s^3 + 6 s^ s + 20 I coefficienti del numeratore e denominatore ordinati si memorizzano su opportuni vettori >> num =[1 1]; den [ ]; si genera poi il sistema: >> sys=tf(num,den); 10 w si specifica l asse delle frequenze: ad esempio 300 punti nell intevallo : w=logspace(-2,2,300) >>bode(sys,w);
82 To: Y(1) Phase (deg); Magnitude (db) Bode Diagrams -20 From: U(1) Frequency (rad/sec)
83 Phase (deg) Magnitude (db) -20 Bode Diagram System: sys Peak gain (db): -22 At frequency (rad/sec): Frequency (rad/sec)

84 Phase (deg) Magnitude (db) MARGINI DI STABILITA 40 Bode Diagram Gm = -26 db (at 1 rad/sec), Pm = deg (at 1.52 rad/sec) Frequency (rad/sec)
85 Phase (deg) Imaginary Axis Magnitude (db) D. BODE D. NYQUIST 40 Bode Diagram Gm = -26 db (at 1 rad/sec), Pm = deg (at 1.52 rad/sec) Nyquist Diagram Frequency (rad/sec) Real Axis
86 Fase Modulo db Dal diagramma di Bode al diagramma di NyquisT Se si dispone dei diagrammi di Bode di G(jw) è conveniente utilizzare questi come ausilio per il tracciamento del diagramma di Nyquist. A tal fine si sceglie sul diagramma di Bode un insieme di pulsazioni campione, e, facendo riferimento alla forma polare di G(jw), si riportano sul piano complesso i valori del modulo e della fase letti dai diagrammi d Bode Esempio G( jw ) 0.02 (1 jw /10)(1 jw / 20)(1 jw /100) 0 2 x G ( w) G( jw ) Diagramma di Bode Si fissano alcuni valori sul diagramma di bode e si riportano nel piano complesso in modulo e fase Diagramma di Nyquist
87 Il diagramma di Nyquist può essere tracciato utilizzando il comando: nyquist ( ): Imaginary Axis sys() s K s( s 1)( s 2) db 2 db Nyquist Diagram 0 db -2 db -4 db db -6 db db -10 db db -20 db K lim Real Axis Nel caso in cui sia stato disegnato un diagramma di Nyquist Il comanda grid traccia i luoghi a modulo costante a ciclo chiuso M M F( jw ) 1 F( jw )

88 Analisi nel dominio del tempo tramite codice MATLAB
89 y(t) y d (t) 1.6 Risposta al gradino 1 Risposta al disturbo Tempo Tempo
90 Luogo delle radici W cl kg() s () s 1 kg ( s ) u K 1 ( s 2)( s 1) y ( s) 1 kg( s) 0 ( s) D( s) kn( s) 0 n gradod() s m gradon() s n m Al variare del guadagno K (reale) da - a + le radici dell equazione caratteristica (s) descrivono una curva nel paino complesso S cui si da il nome di luogo delle radici. i i n m ( s) ( s p ) k ( s z ) 0 (s) al variare di K ha sempre n radici in campo complesso Al variare del guadagno K tra 0<k<+ le n radici di (s) partono per K=0 dagli n poli di D(s) Per k=, m radici tendono agli gli m zeri di N(s). Le restanti n-m radici vanno all infinito
91 Esempio 1 Gs () ( s 1)( s 2) 1 ( s ) 1 k 0 ( s 1)( s 2) u K 1 ( s 2)( s 1) y ( s 1)( s 2) k 0 2 s s k s 1, k 2 k k k 0.25 k k
92 Imaginary Axis u K 1 ( s 3)( s 2)( s 1) y >>sys=zpk([],[ ],1) >>rlocus(sys) ( s 3)( s 2)( s 1) k 0 6 Root Locus Real Axis
93 Il Luogo delle Radici può essere tracciato utilizzando il comando rlocus(): Imaginary Axis sys() s K s( s 1)( s 2) 4 Root Locus Real Axis
94 Imaginary Axis >> sys=zpk([],[ ],1); >> k=0:1:100; >> rlocus(sys,'r.',k) 4 Root Locus Real Axis

95 Imaginary Axis Il Luogo negativo sys() s K s( s 1)( s 2) 5 Root Locus Real Axis
96 Il Luogo delle Radici può essere tracciato utilizzando il comando rlocus(): Imaginary Axis sys() s K s( s 1)( s 2) Il comando grid() disegna i luoghi a smorzamento COSTANTE del sistema del 2 ordine Gs () cos p 1 s w 2 n wns wn wn w n 2 w n 1 Root Locus Real Axis 0 1 p 1 * p 1,2 2 w jw 1 n n

97 Con il comando rlocfind(), posizionandosi con il mouse sul plot del luogo delle radici, è possibile determinare il valore del guadagno K in quel punto del luogo ed il valore delle radici a ciclo chiuso.
98 Imaginary Axis u K ( s 10) s( s 2)( s 1) y s( s 2)( s 1) k( s 10) 0 Root Locus Real Axis
99 Imaginary Axis u K ( s 3) ss ( 2) y s( s 2) k( s 3) 0 4 Root Locus
![>>sisotool u K 1 s( s 2)( s 1) y >> sys=zpk([],[0-2 -3],6)](/docs-images/72/66998050/images/100-0.jpg "Zero/pole/gain: 6 ------------- s (s+2) (s+3) >> sisotool")
100 >>sisotool u K 1 s( s 2)( s 1) y >> sys=zpk([],[0-2 -3],6) Zero/pole/gain: s (s+2) (s+3) >> sisotool >>

101 Analisi con sisitool
 u K s( s 1)( s 2) y 50 Bode Diagram 0-50 -100-150 -90-135 -180-225 -270 10-2 10-1 10 0 10 1 10 2 Frequency")
102 Phase (deg) Magnitude (db) Analizzare al variare del guadagno K il comportamento del sistema: K sys() s s( s 1)( s 2) u K s( s 1)( s 2) y 50 Bode Diagram Frequency (rad/sec)
, Pm = 53.4 deg (at 0.")
103 Phase (deg) Magnitude (db) I margine di fase e di ampiezza possono essere calcolati con l istruzione: margin(): sys() s K s( s 1)( s 2) 50 0 Bode Diagram Gm = 15.6 db (at 1.41 rad/sec), Pm = 53.4 deg (at rad/sec) Frequency (rad/sec)
104 RAPPRESENTAZIONE CARTESIANA o POLARE (Nyquist) di G(jw) Diagramma polare della funzione complessa G(jw) = luogo di punti del piano complesso ottenuti al variare di 0<w Su questa curva è consuetudine porre delle frecce che indicano il verso di percorrenza per valori crescenti della pulsazione w. RAPPRESENTAZIONE POLARE G( jw ) Im G jw j G( jw ) G( jw) G( jw) e SIMMETRIA CONIUGATA G( jw) G( jw) * G jw arg G jw Re ( jw) j Im ( jw) G Re ( jw) j Im ( jw) G G G G( jw ) Re G jw Ricordando che: G(-jw)=G(jw)* è possibile tracciare anche il luogo dei punti G(jw) con w 0 sul piano complesso. Tale curva si ottiene come immagine speculare rispetto all asse reale del diagramma polare di G(jw) con w>0. Quindi considereremo sempre il diagramma polare o di Nyquist di G(jw) per - <w con sopra indicato il verso di percorrenza con delle frecce per valori crescenti della pulsazione w.
105 Sistema di controllo DIGITALE completo di Strumentazione
106 SISTEMI A DATI CAMPIONATI Nello studio dei sistemi a controllo digitale il sottosistema formato dalla connessione in cascata del MANTENITORE di ordine ZERO, PROCESSO e CAMPIONATORE può essere modellata adeguatamente per mezzo di un sistema tempo discreto chiamato sistema a dati campionati. ) G z *( SISTEMA A SEGNALI CAMPIONATI G*( z) Si può dimostrare che il valore dell uscita y(t) (nei soli istanti di campionamento) del sistema continuo a dati campionati può essere calcolata per mezzo di un opportuno sistema tempo discreto. u * ( kt ) y * ( kt )
107 Funzione di Trasferimento di sistemi a dati campionati (approccio nello spazio degli stati ) ut () u * () t H 0 (s) x( t) Ax( t) Bu( t) y( t) Cx( t) Du( t) u () t r G(s) A,B,C,D A( t to) t A( t ) 0 to y * () t yt () W( s) C( SI A) 1 B D Poiché si utilizza uno ZOH Il segnale u r (t) in ingresso al sistema e costante a tratti kt<t<(k+1)t. Si calcola l uscita del sistema nei soli istanti di campionamento: x( t) e x e Bu( ) d u( t) u( kt ) kt t kt T AT T 0 A F e G e Bd
108 Si dimostra che negli istanti di campionamento l uscita del sistema TEMPO CONTINUO è identica a quella di un opportuno SISTEMA TEMPO DISCRETO, caratterizzato dalle seguenti matrici: F, G: AT T 0 A F e G e Bd x( k 1) Fx( k) Gu( k) y( k) Cx( k) Du( k) Quindi ad ogni sistema continuo (A,B,C,D) è associata una intera famiglia di sistema a dati campionati. Le matrici F e G sono infatti funzione del periodo di campionamento T
109 Amplitude Risposta al Gradino di un sistema tempo continuo e del corrispondente sistema a dati campionati 1.5 Step Response Time (sec)
110 1 s 2+0.4s+1 Transfer Fcn1 1 1 Step 5s+1 Transfer Fcn2 Zero-Order Hold s 2+0.4s+1 Transfer Fcn Floating Scope Zero-Order Hold z ] z z ] Discrete Transfer Fcn Floating Scope
111 Ingresso Uscita
112 Possibili problemi di intersampling Sistema discreto Sistema continuo
INTRODUZIONE AL CONTROL SYSTEM TOOLBOX
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm INTRODUZIONE AL CONTROL SYSTEM TOOLBOX Ing. Federica Grossi Tel. 059 2056333
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm INTRODUZIONE AL CONTROL SYSTEM TOOLBOX Ing. Federica Grossi Tel. 059 2056333
INTRODUZIONE AL CONTROL SYSTEM TOOLBOX
 CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html INTRODUZIONE AL CONTROL SYSTEM TOOLBOX Ing. e-mail: luigi.biagiotti@unimore.it
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html INTRODUZIONE AL CONTROL SYSTEM TOOLBOX Ing. e-mail: luigi.biagiotti@unimore.it
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html INTRODUZIONE AL CONTROL SYSTEM TOOLBOX
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html INTRODUZIONE AL CONTROL SYSTEM TOOLBOX
Appello di Febbraio di Fondamenti di Automatica A.A Febbraio 2011 Prof. SILVIA STRADA Tempo a disposizione: 2 h. 30 m.
 Appello di Febbraio di Fondamenti di Automatica A.A. 1-11 Febbraio 11 Prof. SILVIA STRADA Tempo a disposizione: h. 3 m. Nome e Cognome: Matricola: Firma: N.B. Svolgere i vari punti nello spazio che segue
Appello di Febbraio di Fondamenti di Automatica A.A. 1-11 Febbraio 11 Prof. SILVIA STRADA Tempo a disposizione: h. 3 m. Nome e Cognome: Matricola: Firma: N.B. Svolgere i vari punti nello spazio che segue
Esercitazione Si consideri il processo descritto dalla funzione di trasferimento: Soluzione
 Esercitazione. Si consideri il processo descritto dalla funzione di trasferimento: Soluzione s F ( s) k s s s Analizzare la funzione F(s) mediante il luogo delle radici: tracciare il luogo positivo e il
Esercitazione. Si consideri il processo descritto dalla funzione di trasferimento: Soluzione s F ( s) k s s s Analizzare la funzione F(s) mediante il luogo delle radici: tracciare il luogo positivo e il
L ambiente Simulink Simulink è un software utile per modellare, simulare ed analizzare sistemi dinamici complessi.
 SIMULINK L ambiente Simulink Simulink è un software utile per modellare, simulare ed analizzare sistemi dinamici complessi. Perché Matlab non basta? E spesso necessario simulare sistemi complessi, composti
SIMULINK L ambiente Simulink Simulink è un software utile per modellare, simulare ed analizzare sistemi dinamici complessi. Perché Matlab non basta? E spesso necessario simulare sistemi complessi, composti
Esame di Regolazione e Controllo
 Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
Esame di Regolazione e Controllo 23 7 9 A) Per descrivere i disturbi indotti dalla rotazione dell albero motore sull angolo di rollio di un veicolo è possibile utilizzare il modello illustrato nella seguente
3-1 RISPOSTA PERMANENTE NEI SISTEMI LINEARI. y f (t) A(s) =b nsn + + b 0. Classe di funzioni di ingresso. (s z i ) P (s) = (s p i )
 A(s) =b nsn + + b 0. Classe di funzioni di ingresso. (s z i ) P (s) = (s p i )") RISPOSTA PERMANENTE NEI SISTEMI LINEARI u(t) G(s) = B(s) A(s) =b nsn + + b s n + + a y f (t) Classe di funzioni di ingresso U(s) = Q(s) P (s) = l i= r i= (s z i ) (s p i ), l r Forma di Y f (s) (caso p
RISPOSTA PERMANENTE NEI SISTEMI LINEARI u(t) G(s) = B(s) A(s) =b nsn + + b s n + + a y f (t) Classe di funzioni di ingresso U(s) = Q(s) P (s) = l i= r i= (s z i ) (s p i ), l r Forma di Y f (s) (caso p
Esame scritto di: Sistemi a Controreazione N.O.
 Esercizi d esame Esame scritto di: Sistemi a Controreazione N.O. Esercizio N Per il seguente sistema: P s s.5 s( s ) s. Determinare i valori di K per i quali il sistema K P (s) in retroazione unitaria
Esercizi d esame Esame scritto di: Sistemi a Controreazione N.O. Esercizio N Per il seguente sistema: P s s.5 s( s ) s. Determinare i valori di K per i quali il sistema K P (s) in retroazione unitaria
Introduzione a Matlab
 Introduzione a Matlab Giovanni Palmieri 8 Ottobre 2015 Università degli Studi del Sannio Dipartimento di Ingegneria Contenuto della presentazione Introduzione a Matlab Definizione di variabili, matrici
Introduzione a Matlab Giovanni Palmieri 8 Ottobre 2015 Università degli Studi del Sannio Dipartimento di Ingegneria Contenuto della presentazione Introduzione a Matlab Definizione di variabili, matrici
Cognome Nome Matricola Corso di Laurea
 Fondamenti di Controlli Automatici A.A. 213/14 7 gennaio 215 Quiz di Teoria Cognome Nome Matricola Corso di Laurea Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici A.A. 213/14 7 gennaio 215 Quiz di Teoria Cognome Nome Matricola Corso di Laurea Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Controlli Automatici LA Prova del 29/10/2008 Gruppo A
 Cognome Nome Matr. Prova del 9//8 Gruppo A Indicare a quale o a quali delle f.d.t. indicate possono corrispondere le seguenti risposte al gradino unitario 3 Amplitude - - Step Response (s + ) (s + 5)(s
Cognome Nome Matr. Prova del 9//8 Gruppo A Indicare a quale o a quali delle f.d.t. indicate possono corrispondere le seguenti risposte al gradino unitario 3 Amplitude - - Step Response (s + ) (s + 5)(s
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 6/7 Marzo 7 - Esercizi Compito B Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t) = sin(3
Fondamenti di Controlli Automatici - A.A. 6/7 Marzo 7 - Esercizi Compito B Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t) = sin(3
Regolazione e Controllo dei Sistemi Meccanici
 Regolazione e Controllo dei Sistemi Meccanici 3--24 Numero di matricola =ρ =ɛ =β Si consideri il razzo vettore riportato in fig.. Figure : Vettore ARIANE-V. La dinamica planare semplificata e linearizzata
Regolazione e Controllo dei Sistemi Meccanici 3--24 Numero di matricola =ρ =ɛ =β Si consideri il razzo vettore riportato in fig.. Figure : Vettore ARIANE-V. La dinamica planare semplificata e linearizzata
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo. DIAGRAMMI DI BODE
 CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html DIAGRAMMI DI BODE Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html DIAGRAMMI DI BODE Ing. e-mail: luigi.biagiotti@unimore.it http://www.dii.unimore.it/~lbiagiotti
Diagrammi Di Bode. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Diagrammi Di Bode Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Diagrammi di Bode e polari Problema della rappresentazione grafica di funzioni complesse di variabile reale
Diagrammi Di Bode Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Diagrammi di Bode e polari Problema della rappresentazione grafica di funzioni complesse di variabile reale
Control System Toolbox
 Control System Toolbox E` un insieme di funzioni per l analisi di sistemi dinamici (tipicamente lineari tempo invarianti o LTI) e per la sintesi di controllori (in particolare a retroazione). All'interno
Control System Toolbox E` un insieme di funzioni per l analisi di sistemi dinamici (tipicamente lineari tempo invarianti o LTI) e per la sintesi di controllori (in particolare a retroazione). All'interno
Controlli Automatici L-B - Cesena Compito del 28 maggio Domande teoriche
 Compito del 8 maggio 3 - Domande teoriche Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte corrette, e si considerano
Compito del 8 maggio 3 - Domande teoriche Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte corrette, e si considerano
Controlli Automatici 2 27 Settembre 2007 COGNOME...NOME... MATR...CDL (ELETTR, GEST, MECC)
") Controlli Automatici 2 27 Settembre 27 COGNOME...NOME... MATR...CDL (ELETTR, GEST, MECC) Per il processo descritto dalla funzione di trasferimento P(s) = s + 4 (s + )(s +.) a.) Si tracci il diagramma di
Controlli Automatici 2 27 Settembre 27 COGNOME...NOME... MATR...CDL (ELETTR, GEST, MECC) Per il processo descritto dalla funzione di trasferimento P(s) = s + 4 (s + )(s +.) a.) Si tracci il diagramma di
Modellazione e controllo di sistemi dinamici/ca2 25/06/2010
 Modellazione e controllo di sistemi dinamici/ca2 25/6/21 a) Si considerino i due sistemi dinamici S1 e S2 con ingresso u e uscita y descritti rispettivamente da S1 : { ẋ = 4x + 8u y = x u S2 : G(s) = 5
Modellazione e controllo di sistemi dinamici/ca2 25/6/21 a) Si considerino i due sistemi dinamici S1 e S2 con ingresso u e uscita y descritti rispettivamente da S1 : { ẋ = 4x + 8u y = x u S2 : G(s) = 5
Regolazione e Controllo dei Sistemi Meccanici 23 Novembre 2005
 Regolazione e Controllo dei Sistemi Meccanici 23 Novembre 25 Numero di matricola A) Si consideri la risposta al gradino unitario riportata in fig. e si determini qualitativamente la funzione di trasferimento
Regolazione e Controllo dei Sistemi Meccanici 23 Novembre 25 Numero di matricola A) Si consideri la risposta al gradino unitario riportata in fig. e si determini qualitativamente la funzione di trasferimento
Regolazione e Controllo dei Sistemi Meccanici
 Regolazione e Controllo dei Sistemi Meccanici 9--9 A Si consideri la risposta a gradino unitario riportata in figura e si determini qualitativamente la funzione di trasferimento G(s) del sistema che la
Regolazione e Controllo dei Sistemi Meccanici 9--9 A Si consideri la risposta a gradino unitario riportata in figura e si determini qualitativamente la funzione di trasferimento G(s) del sistema che la
COMPITO DI CONTROLLI AUTOMATICI 9 Settembre 2013
 COMPITO DI CONTROLLI AUTOMATICI 9 Settembre 213 Esercizio 1. [1 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1 3 (s.1)2 (s + 1) s
COMPITO DI CONTROLLI AUTOMATICI 9 Settembre 213 Esercizio 1. [1 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1 3 (s.1)2 (s + 1) s
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 18 Settembre 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 8 Settembre 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo e causale descritto dalla seguente equazione differenziale:
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 8 Settembre 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo e causale descritto dalla seguente equazione differenziale:
Fondamenti di Controlli Automatici. 1 Temi d'esame. Politecnico di Torino CeTeM. Politecnico di Torino Pagina 1 di 25 Data ultima revisione 19/09/00
 etem Fondamenti di ontrolli Automatici Temi d'esame ATTENZONE: i temi d esame e gli esercizi proposti riguardano (per ora) solo la parte di analisi di sistemi di controllo; per quanto riguarda il progetto,
etem Fondamenti di ontrolli Automatici Temi d'esame ATTENZONE: i temi d esame e gli esercizi proposti riguardano (per ora) solo la parte di analisi di sistemi di controllo; per quanto riguarda il progetto,
Fondamenti di Automatica Prof. Paolo Rocco. Soluzioni della seconda prova scritta intermedia 6 luglio 2017
 Fondamenti di Automatica Prof. Paolo Rocco Soluzioni della seconda prova scritta intermedia 6 luglio 217 ESERCIZIO 1 Si consideri il sistema di controllo di figura, con y variabile controllata e y o riferimento:
Fondamenti di Automatica Prof. Paolo Rocco Soluzioni della seconda prova scritta intermedia 6 luglio 217 ESERCIZIO 1 Si consideri il sistema di controllo di figura, con y variabile controllata e y o riferimento:
COMPITO DI CONTROLLI AUTOMATICI 7 Febbraio 2013
 COMPITO DI CONTROLLI AUTOMATICI 7 Febbraio 213 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1 1 (s.1)(s + 1) 2 s(s +.1) 2 (s
COMPITO DI CONTROLLI AUTOMATICI 7 Febbraio 213 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1 1 (s.1)(s + 1) 2 s(s +.1) 2 (s
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ gennaio 2004
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/2004 4 gennaio 2004 nome e cognome: numero di matricola: Note: Scrivere le risposte negli spazi appositi. Non consegnare fogli aggiuntivi. La chiarezza
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/2004 4 gennaio 2004 nome e cognome: numero di matricola: Note: Scrivere le risposte negli spazi appositi. Non consegnare fogli aggiuntivi. La chiarezza
COMPITO DI CONTROLLI AUTOMATICI 20 Febbraio 2014
 COMPITO DI CONTROLLI AUTOMATICI Febbraio 14 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1 3 s(s + 1)(s + 1) (s
COMPITO DI CONTROLLI AUTOMATICI Febbraio 14 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1 3 s(s + 1)(s + 1) (s
ESERCIZIO 1 Si consideri il sistema con ingresso u(t) ed uscita y(t) descritto dalle seguenti equazioni
 ed uscita y(t) descritto dalle seguenti equazioni") ESERCIZIO 1 Si consideri il sistema con ingresso u(t) ed uscita y(t) descritto dalle seguenti equazioni ẋ 1 (t) x 1 (t) + 3x 2 (t) + u(t) ẋ 2 (t) 2u(t) y(t) x 1 (t) + x 2 (t) 1. Si classifichi il sistema
ESERCIZIO 1 Si consideri il sistema con ingresso u(t) ed uscita y(t) descritto dalle seguenti equazioni ẋ 1 (t) x 1 (t) + 3x 2 (t) + u(t) ẋ 2 (t) 2u(t) y(t) x 1 (t) + x 2 (t) 1. Si classifichi il sistema
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015
 a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015 Nome e Cognome:........................... Matricola...........................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015 Nome e Cognome:........................... Matricola...........................
Modellazione e controllo Ca1 (a,b,c) Ca2 (d,e,f,g) Mec(a,c,d,e,g)
 Ca2 (d,e,f,g) Mec(a,c,d,e,g)") Modellazione e controllo Ca1 (a,b,c) Ca (d,e,f,g) Mec(a,c,d,e,g) 13 Luglio 011 a) Una corpo di massa M e soggetto a una forza di richiamo elastica F el = K(x)x, una forza di attrito F att = hẋ e una forza
Modellazione e controllo Ca1 (a,b,c) Ca (d,e,f,g) Mec(a,c,d,e,g) 13 Luglio 011 a) Una corpo di massa M e soggetto a una forza di richiamo elastica F el = K(x)x, una forza di attrito F att = hẋ e una forza
Controlli Automatici 2 22/06/05 Compito a
 Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
SOLUZIONE. Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015
 a.a Prof. Silvia Strada Seconda prova intermedia 12 Febbraio 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.24-5 Prof. Silvia Strada Seconda prova intermedia 2 Febbraio 25 SOLUZIONE ESERCIZIO punti: 8 su 32 Si consideri un sistema dinamico,
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.24-5 Prof. Silvia Strada Seconda prova intermedia 2 Febbraio 25 SOLUZIONE ESERCIZIO punti: 8 su 32 Si consideri un sistema dinamico,
Esercizio 1. Si consideri la funzione di trasferimento. G(s) = K 1 + st
 = K 1 + st") Esercizio. Si consideri la funzione di trasferimento G(s) = K + st + sτ. Si dimostri che, qualunque siano i valori dei parametri reali K, T e τ, il relativo diagramma di Nyquist è una circonferenza. Si
Esercizio. Si consideri la funzione di trasferimento G(s) = K + st + sτ. Si dimostri che, qualunque siano i valori dei parametri reali K, T e τ, il relativo diagramma di Nyquist è una circonferenza. Si
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 19 Luglio 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 9 Luglio 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = (s + )
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 9 Luglio 22 Esercizio. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = (s + )
COMPITO DI CONTROLLI AUTOMATICI 21 Febbraio 2013
 COMPITO DI CONTROLLI AUTOMATICI 21 Febbraio 213 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = (s + 1)(s ) s 2 (s
COMPITO DI CONTROLLI AUTOMATICI 21 Febbraio 213 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = (s + 1)(s ) s 2 (s
COMPITO DI CONTROLLI AUTOMATICI 26 Settembre 2008
 COMPITO DI CONTROLLI AUTOMATICI 26 Settembre 28 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a d2 y(t) 2 con a parametro reale.
COMPITO DI CONTROLLI AUTOMATICI 26 Settembre 28 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a d2 y(t) 2 con a parametro reale.
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 1 Settembre 2014
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 1 Settembre 214 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento:
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 1 Settembre 214 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento:
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI TEMA A - 2 Febbraio 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI TEMA A - Febbraio 1 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s)
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI TEMA A - Febbraio 1 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s)
Utilizzo di Matlab per l analisi di sistemi dinamici lineari
 Intro a Matlab per sistemi LTI, 1 Utilizzo di Matlab per l analisi di sistemi dinamici lineari Sistemi dinamici lineari a tempo continuo ed a tempo discreto Indice del materiale Intro a Matlab per sistemi
Intro a Matlab per sistemi LTI, 1 Utilizzo di Matlab per l analisi di sistemi dinamici lineari Sistemi dinamici lineari a tempo continuo ed a tempo discreto Indice del materiale Intro a Matlab per sistemi
B = Si studi, giustificando sinteticamente le proprie affermazioni, la stabilità del sistema. si A = G(s) = Y f (s) U(s) = 1.
 = Y f (s) U(s) = 1.") ESERCIZIO 1 Un sistema dinamico lineare invariante e a tempo continuo è descritto dall equazione differenziale che lega l ingresso all uscita:... y (t) + ÿ(t) + 4ẏ(t) + 4y(t) = u(t) 1. Si determinino le
ESERCIZIO 1 Un sistema dinamico lineare invariante e a tempo continuo è descritto dall equazione differenziale che lega l ingresso all uscita:... y (t) + ÿ(t) + 4ẏ(t) + 4y(t) = u(t) 1. Si determinino le
INTRODUZIONE A. MATLAB e SIMULINK. Corso di Sistemi di Controllo Digitale. Organizzazione delle Lezioni
 INTRODUZIONE A MATLAB e SIMULINK Corso di Sistemi di Controllo Digitale Organizzazione delle Lezioni INTRODUZIONE A MATLAB DEFINIZIONE DI VARIABILI, MATRICI E VETTORI FUNZIONI ELEMENTARI PER SCALARI E
INTRODUZIONE A MATLAB e SIMULINK Corso di Sistemi di Controllo Digitale Organizzazione delle Lezioni INTRODUZIONE A MATLAB DEFINIZIONE DI VARIABILI, MATRICI E VETTORI FUNZIONI ELEMENTARI PER SCALARI E
Cognome Nome: Matricola: Corso di Laurea: Fondamenti di Controlli Automatici - A.A. 2011/12 20 settembre Domande Teoriche
 Fondamenti di Controlli Automatici - A.A. / settembre - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. / settembre - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Introduzione a MATLAB
 Introduzione a MATLAB Principali comandi MATLAB utili per il corso di Controlli Automatici (01AKS e 02FSQ) Politecnico di Torino Sistema in catena chiusa Il comando feedback genera il sistema LTI SYS con
Introduzione a MATLAB Principali comandi MATLAB utili per il corso di Controlli Automatici (01AKS e 02FSQ) Politecnico di Torino Sistema in catena chiusa Il comando feedback genera il sistema LTI SYS con
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 1/13 1 giugno 13 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si ritengono
Fondamenti di Controlli Automatici - A.A. 1/13 1 giugno 13 - Domande Teoriche Nome: Nr. Mat. Firma: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si ritengono
Fondamenti di Automatica Prof. Luca Bascetta. Soluzioni della seconda prova scritta intermedia 25 giugno 2018
 Fondamenti di Automatica Prof. Luca Bascetta Soluzioni della seconda prova scritta intermedia 25 giugno 28 ESERCIZIO Si consideri il sistema di controllo di figura, con y variabile controllata e y o riferimento:
Fondamenti di Automatica Prof. Luca Bascetta Soluzioni della seconda prova scritta intermedia 25 giugno 28 ESERCIZIO Si consideri il sistema di controllo di figura, con y variabile controllata e y o riferimento:
Stabilità dei sistemi di controllo in retroazione
 Stabilità dei sistemi di controllo in retroazione Un esempio di analisi della stabilità Il caso di un sistema a non minima rotazione di fase Pendolo inverso su carrello Levitatore magnetico 7 Politecnico
Stabilità dei sistemi di controllo in retroazione Un esempio di analisi della stabilità Il caso di un sistema a non minima rotazione di fase Pendolo inverso su carrello Levitatore magnetico 7 Politecnico
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2005/ febbraio 2006 TESTO E SOLUZIONE
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 25/26 13 febbraio 26 TESTO E SOLUZIONE Esercizio 1 Si consideri il sistema lineare descritto dalle equazioni di stato seguenti: ẋ 1 (t) = 2x 1 (t) αx 2 (t)
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 25/26 13 febbraio 26 TESTO E SOLUZIONE Esercizio 1 Si consideri il sistema lineare descritto dalle equazioni di stato seguenti: ẋ 1 (t) = 2x 1 (t) αx 2 (t)
Cognome Nome Matricola Corso
 Fondamenti di Controlli Automatici - A.A. 23/4 23 luglio 24 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Fondamenti di Controlli Automatici - A.A. 23/4 23 luglio 24 - Quiz di Teoria Cognome Nome Matricola Corso Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni che si
Regolazione e Controllo (solo V.O.) I Parte 7 Settembre 2004
 I Parte 7 Settembre 2004") Regolazione e Controllo (solo V.O.) I Parte 7 Settembre 4 Numero di matricola = α = β = γ Si consideri il sistema meccanico di fig., costituito da due masse mobili (pari rispettivamente a m = + α kg e
Regolazione e Controllo (solo V.O.) I Parte 7 Settembre 4 Numero di matricola = α = β = γ Si consideri il sistema meccanico di fig., costituito da due masse mobili (pari rispettivamente a m = + α kg e
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 21 Febbraio 2012
 COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 21 Febbraio 212 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1
COMPITO DI FONDAMENTI E APPLICAZIONI DI CONTROLLI AUTOMATICI 21 Febbraio 212 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione di trasferimento: G(s) = 1
MATLAB e SIMULINK INTRODUZIONE A. Organizzazione delle Lezioni. Variabili ed Espressioni. Introduzione
 Organizzazione delle Lezioni INTRODUZIONE A MATLAB e SIMULINK Corso di Sistemi di Controllo Digitale INTRODUZIONE A MATLAB DEFINIZIONE DI VARIABILI, MATRICI E VETTORI FUNZIONI ELEMENTARI PER SCALARI E
Organizzazione delle Lezioni INTRODUZIONE A MATLAB e SIMULINK Corso di Sistemi di Controllo Digitale INTRODUZIONE A MATLAB DEFINIZIONE DI VARIABILI, MATRICI E VETTORI FUNZIONI ELEMENTARI PER SCALARI E
Controlli Automatici L-B - A.A. 2002/2003 Esercitazione 16/06/2003
 Controlli Automatici L-B - A.A. 22/23 Esercitazione 16/6/23 1. Si consideri lo schema a blocchi di figura. x(t) e(t) R(s) u(t) G(s) y(t) - R(s) = K τ zs + 1 τ p s + 1, G(s) = (s + 5) s(s + 5)(s + 1) Assumendo
Controlli Automatici L-B - A.A. 22/23 Esercitazione 16/6/23 1. Si consideri lo schema a blocchi di figura. x(t) e(t) R(s) u(t) G(s) y(t) - R(s) = K τ zs + 1 τ p s + 1, G(s) = (s + 5) s(s + 5)(s + 1) Assumendo
COMPITO DI CONTROLLI AUTOMATICI 25 Giugno 2007
 COMPITO DI CONTROLLI AUTOMATICI 25 Giugno 27 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a 2d2 y(t) 2 con a parametro reale.
COMPITO DI CONTROLLI AUTOMATICI 25 Giugno 27 Esercizio 1. Si consideri il modello ingresso/uscita a tempo continuo descritto dalla seguente equazione differenziale: a 2d2 y(t) 2 con a parametro reale.
Corso di Teoria dei Sistemi N. Raccolta di esercizi svolti tratti da temi d esame
 Politecnico di Torino - Consorzio Nettuno Michele Taragna Corso di Teoria dei Sistemi - 955N Raccolta di esercizi svolti tratti da temi d esame Diploma Universitario a Distanza in Ingegneria Informatica
Politecnico di Torino - Consorzio Nettuno Michele Taragna Corso di Teoria dei Sistemi - 955N Raccolta di esercizi svolti tratti da temi d esame Diploma Universitario a Distanza in Ingegneria Informatica
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ luglio Soluzione
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
COMPITO DI CONTROLLI AUTOMATICI Corso di Laurea in Ingegneria dell Informazione 6 Settembre 2013
 COMPITO DI CONTROLLI AUTOMATICI Corso di Laurea in Ingegneria dell Informazione 6 Settembre 213 Esercizio 1. [9. + 1 punti] Sia G(s) = (s 2 +1)(s+1) (s.1)(s 2 +.2s+1) la funzione di trasferimento di un
COMPITO DI CONTROLLI AUTOMATICI Corso di Laurea in Ingegneria dell Informazione 6 Settembre 213 Esercizio 1. [9. + 1 punti] Sia G(s) = (s 2 +1)(s+1) (s.1)(s 2 +.2s+1) la funzione di trasferimento di un
INGEGNERIA DELLE TELECOMUNICAZIONI
 INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME II prova in itinere 4 luglio 214 Anno Accademico 213/214 ESERCIZIO 1 Si consideri il sistema seguente Si ponga
INGEGNERIA DELLE TELECOMUNICAZIONI FONDAMENTI DI AUTOMATICA Prof. Marcello Farina TEMA D ESAME II prova in itinere 4 luglio 214 Anno Accademico 213/214 ESERCIZIO 1 Si consideri il sistema seguente Si ponga
Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 2006
 Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 26 Numero di matricola = 1α 1 = 1β 1 Si consideri lo schema di azionamento di una valvola rotativa riportato in fig1 Il sistema è costituito da tre
Regolazione e Controllo dei Sistemi Meccanici 1 Giugno 26 Numero di matricola = 1α 1 = 1β 1 Si consideri lo schema di azionamento di una valvola rotativa riportato in fig1 Il sistema è costituito da tre
Fondamenti di Automatica - I Parte Metodologia di approccio al controllo per sistemi instabili ad anello aperto.
 Fondamenti di Automatica - I Parte Metodologia di approccio al controllo per sistemi instabili ad anello aperto. Antonio Bicchi, Nicola Sgambelluri Università di Pisa Aprile 25. INDICE 2 Indice Introduzione
Fondamenti di Automatica - I Parte Metodologia di approccio al controllo per sistemi instabili ad anello aperto. Antonio Bicchi, Nicola Sgambelluri Università di Pisa Aprile 25. INDICE 2 Indice Introduzione
Soluzione degli esercizi del Capitolo 9
 Soluzione degli esercizi del Capitolo 9 Soluzione dell Esercizio 9.1 Il diagramma polare associato alla funzione L(s) = µ/s, µ > comprende l intero semiasse reale negativo. È quindi immediato concludere
Soluzione degli esercizi del Capitolo 9 Soluzione dell Esercizio 9.1 Il diagramma polare associato alla funzione L(s) = µ/s, µ > comprende l intero semiasse reale negativo. È quindi immediato concludere
Introduzione a matlab 5* E Control system toolbox
 Introduzione a matlab 5* E Control system toolbox Diego Regruto Tomalino (regruto@polito.it) DAUIN - Politecnico di Torino Aprile 2002 * Questi lucidi sono una integrazione a introduzione a MATLAB Versione
Introduzione a matlab 5* E Control system toolbox Diego Regruto Tomalino (regruto@polito.it) DAUIN - Politecnico di Torino Aprile 2002 * Questi lucidi sono una integrazione a introduzione a MATLAB Versione
Esercizi sul luogo delle radici
 Esercizi sul luogo delle radici Gli esercizi che seguono faranno riferimento allo schema a blocchi riportato di seguito. r k G(s) y Esercizio. Sia data la seguente funzione di trasferimento s(s+). Verificare
Esercizi sul luogo delle radici Gli esercizi che seguono faranno riferimento allo schema a blocchi riportato di seguito. r k G(s) y Esercizio. Sia data la seguente funzione di trasferimento s(s+). Verificare
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 18 Luglio 2016
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 18 Luglio 216 Esercizio 1. [1 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 18 Luglio 216 Esercizio 1. [1 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 1 Febbraio 2016
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 1 Febbraio 16 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Energia Elettrica e Aerospaziale 1 Febbraio 16 Esercizio 1. [11 punti] Si consideri il modello ingresso/uscita a tempo continuo avente la seguente funzione
COMPITO DI CONTROLLI AUTOMATICI - 7 CFU e 9 CFU 16 Febbraio 2010
 COMPITO DI CONTROLLI AUTOMATICI - 7 CFU e 9 CFU 6 Febbraio Esercizio. Si consideri il modello ingresso/uscita a tempo continuo e causale descritto dalla seguente equazione differenziale: d 3 y(t) dt 3
COMPITO DI CONTROLLI AUTOMATICI - 7 CFU e 9 CFU 6 Febbraio Esercizio. Si consideri il modello ingresso/uscita a tempo continuo e causale descritto dalla seguente equazione differenziale: d 3 y(t) dt 3
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 1 Settembre 2015
 COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 1 Settembre 15 Esercizio 1. [9.5 punti] Dato il sistema a tempo-continuo di funzione di trasferimento ( 1 +.1s ) (s + 1) G(s) = s (1.s +.1s
COMPITO DI CONTROLLI AUTOMATICI Ingegneria dell Informazione 1 Settembre 15 Esercizio 1. [9.5 punti] Dato il sistema a tempo-continuo di funzione di trasferimento ( 1 +.1s ) (s + 1) G(s) = s (1.s +.1s
Lezione 8: Diagramma di Nyquist
 Fondamenti di Automatica 1 Lezione 8: Diagramma di Nyquist Regole per il tracciamento qualitativo Esercizi Fondamenti di Automatica 2 Diagrammi polari o di Nyquist Diagramma polare fornisce, al variare
Fondamenti di Automatica 1 Lezione 8: Diagramma di Nyquist Regole per il tracciamento qualitativo Esercizi Fondamenti di Automatica 2 Diagrammi polari o di Nyquist Diagramma polare fornisce, al variare
Per la descrizione dei comandi MATLAB verranno usate le seguenti convenzioni.
 AMATLAB A.1 Introduzione MATLAB (abbreviazione di MATrix LABoratory) è un software sviluppato da The MathWorks Inc. È diffusamente utilizzato per risolvere problemi computazionali nell analisi e progettazione
AMATLAB A.1 Introduzione MATLAB (abbreviazione di MATrix LABoratory) è un software sviluppato da The MathWorks Inc. È diffusamente utilizzato per risolvere problemi computazionali nell analisi e progettazione
Luogo delle Radici. Dr. Andrea Gasparri Dipartimento di Informatica ed Automazione Università degli studi Roma Tre
 Dr. Andrea Gasparri gasparri@dia.uniroma3.it Dipartimento di Informatica ed Automazione Università degli studi Roma Tre October 21, 2009 Definizioni Il luogo delle radici è un procedimento grafico che
Dr. Andrea Gasparri gasparri@dia.uniroma3.it Dipartimento di Informatica ed Automazione Università degli studi Roma Tre October 21, 2009 Definizioni Il luogo delle radici è un procedimento grafico che
Esercitazione di laboratorio del
 Esercitazione di laboratorio del 23-4-213 Esercizio 1: Legge di controllo e ricostruzione dello stato; progetto del regolatore Innanzitutto occorre definire il sistema in spazio di stato nel workspace
Esercitazione di laboratorio del 23-4-213 Esercizio 1: Legge di controllo e ricostruzione dello stato; progetto del regolatore Innanzitutto occorre definire il sistema in spazio di stato nel workspace
COMPITO DI CONTROLLI AUTOMATICI Corso di Laurea in Ingegneria dell Informazione 18 Settembre 2012
 COMPITO DI CONTROLLI AUTOMATICI Corso di Laurea in Ingegneria dell Informazione 8 Settembre Esercizio. (pt.) Sia G(s) = (s +.)(s s + ) s (s ) la funzione di trasferimento di un modello ingresso/uscita,
COMPITO DI CONTROLLI AUTOMATICI Corso di Laurea in Ingegneria dell Informazione 8 Settembre Esercizio. (pt.) Sia G(s) = (s +.)(s s + ) s (s ) la funzione di trasferimento di un modello ingresso/uscita,
Presentazione Progetti L-B
 Presentazione Progetti L-B Controlli Automatici L-B ing. Roberto Naldi AA 2008/2009 Introduzione Tre differenti tipologie Prima tipologia: Problematiche derivanti dalla presenza di poli complessi coniugati
Presentazione Progetti L-B Controlli Automatici L-B ing. Roberto Naldi AA 2008/2009 Introduzione Tre differenti tipologie Prima tipologia: Problematiche derivanti dalla presenza di poli complessi coniugati
Sistemi Elementari. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Sistemi Elementari Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Rappresentazioni di una funzione di trasferimento Una funzione di trasferimento espressa in forma polinomiale
Sistemi Elementari Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Rappresentazioni di una funzione di trasferimento Una funzione di trasferimento espressa in forma polinomiale
Funzioni di trasferimento, risposte forzate, rappresentazione della risposta in frequenza
 Funzioni di trasferimento, risposte forzate, rappresentazione della risposta in frequenza Traccia di soluzione dei due esercizi Premessa generale: i valori numerici calcolati da Matlab e di seguito riportati
Funzioni di trasferimento, risposte forzate, rappresentazione della risposta in frequenza Traccia di soluzione dei due esercizi Premessa generale: i valori numerici calcolati da Matlab e di seguito riportati
Laboratorio di MATLAB
 DII Università di Siena Laboratorio di MATLAB Alessandro Alessio Dipartimento di Ingegneria dell Informazione, Università di Siena, Italy alessio@dii.unisi.it www.dii.unisi.it/ control/teaching thanks
DII Università di Siena Laboratorio di MATLAB Alessandro Alessio Dipartimento di Ingegneria dell Informazione, Università di Siena, Italy alessio@dii.unisi.it www.dii.unisi.it/ control/teaching thanks
Controllo in retroazione: Analisi e Sensitività. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Controllo in retroazione: Analisi e Sensitività Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Schema di riferimento per il controllo in retroazione Come già visto lo schema
Controllo in retroazione: Analisi e Sensitività Prof. Laura Giarré Laura.Giarre@UNIMORE.IT https://giarre.wordpress.com/ca/ Schema di riferimento per il controllo in retroazione Come già visto lo schema
Corso di Teoria dei Sistemi N. Raccolta di esercizi svolti tratti da temi d esame
 Politecnico di Torino - Consorzio Nettuno Michele Taragna Corso di Teoria dei Sistemi - 955N Raccolta di esercizi svolti tratti da temi d esame Diploma Universitario a Distanza in Ingegneria Informatica
Politecnico di Torino - Consorzio Nettuno Michele Taragna Corso di Teoria dei Sistemi - 955N Raccolta di esercizi svolti tratti da temi d esame Diploma Universitario a Distanza in Ingegneria Informatica
t (sec) t (sec)
 t (sec)") Nome e Cognome: Anno di frequenza: Esame di Regolazione e Controllo dei Sistemi Meccanici { {{ Numero di matricola { { =, =, =, =, A (pt. ) Per descrivere la dinamica delle sospensioni di un veicolo che
Nome e Cognome: Anno di frequenza: Esame di Regolazione e Controllo dei Sistemi Meccanici { {{ Numero di matricola { { =, =, =, =, A (pt. ) Per descrivere la dinamica delle sospensioni di un veicolo che
Progetto di reti anticipatrici
 Reti anticipatrici - 1 Corso di Laurea in Ingegneria Meccanica Progetto di reti anticipatrici DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Reti
Reti anticipatrici - 1 Corso di Laurea in Ingegneria Meccanica Progetto di reti anticipatrici DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Reti
Definizione del problema (1/2)
") Casi di studio Definizione del problema (1/2) Si consideri il consueto schema di controllo r Kr y des + e u + d y C(s) F(s) + 2(s +.1) con: F(s) =, C(s) = K 2 c, Kr = 1 s(s +.2s + 1)(s + 1) Controllore
Casi di studio Definizione del problema (1/2) Si consideri il consueto schema di controllo r Kr y des + e u + d y C(s) F(s) + 2(s +.1) con: F(s) =, C(s) = K 2 c, Kr = 1 s(s +.2s + 1)(s + 1) Controllore
Regolazione e Controllo dei Sistemi Meccanici 31 gennaio Numero di matricola = 10α 1 = 10β 1 = 10γ 1. Figure 1: Modello del sistema
 Regolazione e Controllo dei Sistemi Meccanici 31 gennaio 25 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 Figure 1: Modello del sistema Si consideri il sistema riportato in fig.1 in cui un corpo di massa m
Regolazione e Controllo dei Sistemi Meccanici 31 gennaio 25 Numero di matricola = 1α 1 = 1β 1 = 1γ 1 Figure 1: Modello del sistema Si consideri il sistema riportato in fig.1 in cui un corpo di massa m
5. Per ω = 1/τ il diagramma reale di Bode delle ampiezze della funzione G(jω) =
 =") Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Fondamenti di Controlli Automatici - A.A. 211/12 3 luglio 212 - Domande Teoriche Cognome Nome: Matricola: Corso di Laurea: Per ciascuno dei test a soluzione multipla segnare con una crocetta tutte le affermazioni
Invito alla lettura. Simboli e notazioni
 Indice Generale Invito alla lettura Simboli e notazioni xiii xv 1 Automatica, ieri e oggi 1 1.1 Le disavventure di Sir Shovell................... 1 1.2 Missioni cometarie......................... 1 1.3
Indice Generale Invito alla lettura Simboli e notazioni xiii xv 1 Automatica, ieri e oggi 1 1.1 Le disavventure di Sir Shovell................... 1 1.2 Missioni cometarie......................... 1 1.3
ANALISI DEI SISTEMI IN RETROAZIONE E FUNZIONI DI SENSITIVITA
 CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html ANALISI DEI SISTEMI IN RETROAZIONE E FUNZIONI DI SENSITIVITA Ing. e-mail:
CONTROLLI AUTOMATICI Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/controlliautomatici.html ANALISI DEI SISTEMI IN RETROAZIONE E FUNZIONI DI SENSITIVITA Ing. e-mail:
Il luogo delle radici
 Il luogo delle radici Andrea Munafò Università di Pisa April 14, 2012 Luogo delle radici (Evans 1948) Il luogo delle radici è uno strumento grafico per l analisi e la sintesi di sistemi di controllo a
Il luogo delle radici Andrea Munafò Università di Pisa April 14, 2012 Luogo delle radici (Evans 1948) Il luogo delle radici è uno strumento grafico per l analisi e la sintesi di sistemi di controllo a
Fondamenti di Automatica (CL Ing. Gestionale) a.a Prof. Silvia Strada Appello del 24 Settembre 2015
 a.a Prof. Silvia Strada Appello del 24 Settembre 2015") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Appello del 24 Settembre 2015 Nome e Cognome:........................... Matricola...........................
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Appello del 24 Settembre 2015 Nome e Cognome:........................... Matricola...........................
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici - Prima parte Aprile 8 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.) Calcolare la trasformata di Laplace X(s) dei seguenti
Controlli Automatici - Prima parte Aprile 8 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.) Calcolare la trasformata di Laplace X(s) dei seguenti
Progetto di reti ritardatrici
 Reti ritardatrici- 1 Corso di Laurea in Ingegneria Meccanica Progetto di reti ritardatrici DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Reti ritardatrici
Reti ritardatrici- 1 Corso di Laurea in Ingegneria Meccanica Progetto di reti ritardatrici DEIS-Università di Bologna Tel. 51 2932 Email: crossi@deis.unibo.it URL: www-lar.deis.unibo.it/~crossi Reti ritardatrici
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2005/ giugno 2006 TESTO E SOLUZIONE
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 25/26 5 giugno 26 TESTO E SOLUZIONE Esercizio 1 Si consideri il sistema dinamico descritto dalle equazioni di stato ẋ 1 (t) = x 1 (t) + 2x 2 (t) + u(t) ẋ
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 25/26 5 giugno 26 TESTO E SOLUZIONE Esercizio 1 Si consideri il sistema dinamico descritto dalle equazioni di stato ẋ 1 (t) = x 1 (t) + 2x 2 (t) + u(t) ẋ
Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro.
 Controlli Automatici A 22 Giugno 11 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici A 22 Giugno 11 - Esercizi Si risolvano i seguenti esercizi. Nome: Nr. Mat. Firma: C.L.: Info. Elet. Telec. Altro. a.1) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 8 giugno 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
Cognome: Nome: N. Matr.: Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 8 giugno 217 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte
ẋ 1 = x x 1 + u ẋ 2 = 2x 2 + 2u y = x 2
 Testo e soluzione dell appello del 2 settembre 2. Si consideri il sistema descritto dalle seguenti equazioni: ẋ = x 2 2 + 2x + u ẋ 2 = 2x 2 + 2u y = x 2. Determinare l espressione analitica del movimento
Testo e soluzione dell appello del 2 settembre 2. Si consideri il sistema descritto dalle seguenti equazioni: ẋ = x 2 2 + 2x + u ẋ 2 = 2x 2 + 2u y = x 2. Determinare l espressione analitica del movimento
Controlli Automatici - Parte A
 Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 218 - Quiz Per ciascuno
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarré Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 218 - Quiz Per ciascuno
Sistemi lineari in Matlab
 Capitolo. INTRODUZIONE. Sistemi lineari in Matlab Esempio numerico in Matlab: LTI Sstems in Matlab.m % LTI_Sstems_in_Matlab.m clear all; clc echo on % Si consideri il sistema lineare (LS) tempo continuo
Capitolo. INTRODUZIONE. Sistemi lineari in Matlab Esempio numerico in Matlab: LTI Sstems in Matlab.m % LTI_Sstems_in_Matlab.m clear all; clc echo on % Si consideri il sistema lineare (LS) tempo continuo
Corso di Laurea in Ingegneria Meccatronica PROGETTO DEL CONTROLLORE. CA 9 - LuogoDelleRadici
 Automation Robotics and System CONTROL Corso di Laurea in Ingegneria Meccatronica Università degli Studi di Modena e Reggio Emilia PROGETTO DEL CONTROLLORE MEDIANTE IL LUOGO DELLE RADICI CA 9 - LuogoDelleRadici
Automation Robotics and System CONTROL Corso di Laurea in Ingegneria Meccatronica Università degli Studi di Modena e Reggio Emilia PROGETTO DEL CONTROLLORE MEDIANTE IL LUOGO DELLE RADICI CA 9 - LuogoDelleRadici