Introduzione alla Robotica
|
|
|
- Maddalena Franchi
- 7 anni fa
- Visualizzazioni
Transcript



1 Introduzione alla Robotica Prof. Bruno SICILIANO


2 L era dei robot Introduzione alla Robotica 2/60
 L immaginario collettivo è portato a vedere nel robot un")

3 Robot Introduzione alla Robotica 3/60 Robot (robota = lavoro esecutivo) Una delle grandi aspirazioni dell'uomo è stata quella di infondere la vita nei suoi artefatti (mitologia) L immaginario collettivo è portato a vedere nel robot un androide che parla e cammina, vede e sente, con gesti e reazioni di tipo umano (fantascienza) Il robot è definito come una qualsiasi macchina in grado di svolgere dei compiti in maniera automatizzata per sostituire o migliorare il lavoro umano (realtà)

4 Un precursore Introduzione alla Robotica 4/60 La metafora di Tempi Moderni














5 Evoluzione Introduzione alla Robotica 5/60 SOGNO dell Uomo di replicare sé stesso BISOGNO di macchine utili Robotica industriale 1920 Robotica per l esplorazione Applicazioni manifatturiere Applicazioni spaziali Robotica di servizio Robotica umanoide Applicazioni mediche Robotica personale?
6 Un viaggio lungo 50 anni Introduzione alla Robotica 6/60







7 Robotica: connessione intelligente tra percezione e azione Definizione Introduzione alla Robotica 7/60 CONTROLLO ATTUATORI SENSORI dati visuali comandi motori governo braccio/mano dati aptici
8 Componenti di un robot Introduzione alla Robotica 8/60 Sistema meccanico Organi di locomozione (ruote, cingoli, gambe meccaniche) Organi di manipolazione (braccia meccaniche, utensili, mani artificiali) Sistema di attuazione Anima le componenti meccaniche del robot Controllo del moto (servomotori, azionamenti e organi di trasmissione) Sistema sensoriale Sensori propriocettivi (stato interno del robot) Sensori esterocettivi (stato esterno dell ambiente) Sistema di governo Esecuzione dell azione nel rispetto della pianificazione del compito e dei vincoli imposti da robot e ambiente Adozione del principio del feedback (retroazione) Impiego di modelli del sistema robotico
9 Robot manipolatori Introduzione alla Robotica 9/60 La struttura meccanica di un robot manipolatore consiste in un insieme di corpi rigidi (bracci) interconnessi tra di loro per mezzo di articolazioni (giunti) Struttura portante che assicura mobilità Polso che conferisce destrezza Organo terminale che esegue il compito per cui il robot è utilizzato Struttura meccanica a catena cinematica aperta o a catena cinematica chiusa Mobilità (giunti prismatici o rotoidali) Gradi di libertà 3 per la posizione + 3 per l orientamento Spazio di lavoro (porzione dell ambiente circostante a cui può accedere l organo terminale)
10 Manipolatore cartesiano Introduzione alla Robotica 10/60 Tre giunti prismatici Ottime caratteristiche di rigidezza meccanica Precisione di posizionamento del polso costante nello spazio di lavoro Operazioni di trasporto e assemblaggio Azionamenti elettrici (talvolta pneumatici)
11 Manipolazione di oggetti di dimensione e peso rilevanti Manipolatore a portale Introduzione alla Robotica 11/60
12 Manipolatore cilindrico Introduzione alla Robotica 12/60 Un giunto rotoidale e due prismatici Buone caratteristiche di rigidezza meccanica La precisione di posizionamento del polso si riduce al crescere dello sbraccio orizzontale Operazioni di trasporto di oggetti anche di peso rilevante Azionamenti idraulici (o elettrici)
13 Manipolatore sferico Introduzione alla Robotica 13/60 Due giunti rotoidali e uno prismatico Discrete caratteristiche di rigidezza meccanica La precisione di posizionamento del polso si riduce al crescere dello sbraccio radiale Operazioni di lavorazione Azionamenti elettrici
14 Manipolatore SCARA Introduzione alla Robotica 14/60 Due giunti rotoidali e uno prismatico Elevata rigidezza a carichi verticali e cedevolezza a carichi orizzontali Selective Compliance Assembly Robot Arm La precisione di posizionamento del polso si riduce al crescere della distanza del polso stesso dall asse del primo giunto Manipolazione di piccoli oggetti Azionamenti elettrici
15 Manipolatore antropomorfo Introduzione alla Robotica 15/60 Tre giunti rotoidali Struttura più destra Precisione di posizionamento variabile Applicazioni molteplici Azionamenti elettrici
16 Manipolatore parallelo Introduzione alla Robotica 16/60 Più catene cinematiche che connettono la base all organo terminale Elevata rigidezza Velocità operative molto elevate Spazio di lavoro ristretto

17 Manipolatore ibrido parallelo seriale Introduzione alla Robotica 17/60 Struttura portante parallela Cinematica seriale Generazione di forze elevate lungo le componenti verticali
18 Polso e organo terminale Introduzione alla Robotica 18/60 Polso sferico Giunti rotoidali che determinano l orientamento dell organo terminale Caratteristiche di compattezza e destrezza Disaccoppiamento tra posizione e orientamento Organo terminale Specificato in relazione al compito che il robot deve eseguire Pinza (trasporto) Utensile o dispositivo specializzato (lavorazione e assemblaggio)
19 Robot mobili Introduzione alla Robotica 19/60 La struttura meccanica di un robot mobile consiste in un insieme di corpi rigidi dotati di un sistema di locomozione Robot mobili su ruote Base (chassis) Ruote che lo movimentano rispetto al suolo Eventuali rimorchi (su ruote) Robot mobili su gambe Arti Piede periodicamente in contatto con il suolo (locomozione) Progetto ispirato a organismi viventi (robotica biomimetica)
20 Ruote convenzionali Introduzione alla Robotica 20/60 Ruota fissa Può ruotare intorno a un asse passante per il centro della ruota e normale al piano che la contiene Orientamento costante rispetto allo chassis (solidale) Ruota orientabile Primo asse di rotazione come ruota fissa Secondo asse verticale passante per il centro della ruota Orientamento variabile rispetto allo chassis Ruota eccentrica (caster) Asse verticale eccentrico rispetto alla ruota (offset) Allineamento automatico e rapido nella direzione di spinta dello chassis Punto di appoggio per il bilanciamento statico (senza influenzare la mobilità dello chassis)
21 Veicolo a trazione differenziale Introduzione alla Robotica 21/60 Due ruote fisse con lo stesso asse di rotazione Controllate separatamente Una ruota eccentrica (dimensione ridotte) Passiva Può ruotare sul posto (senza muovere il centro delle ruote) se le velocità angolari delle due ruote sono uguali e contrarie
22 Veicolo a trazione sincronizzata Introduzione alla Robotica 22/60 Tre ruote orientabili allineate Comandate in modo solidale da due soli motori attraverso un accoppiamento meccanico (catena, cinghia di trasmissione) Il primo motore controlla la rotazione delle ruote intorno all asse orizzontale (trazione del veicolo) Il secondo motore controlla la rotazione delle ruote intorno all asse verticale (orientamento del veicolo)
23 Triciclo Introduzione alla Robotica 23/60 Due ruote fisse sull asse posteriore Comandate da un unico motore (trazione del veicolo) Ruota orientabile Comandata da motore (sterzo del veicolo) In alternativa Ruote posteriori passive Ruota anteriore (sterzo + trazione)
24 Automobile Introduzione alla Robotica 24/60 Due ruote fisse sull asse posteriore Due ruote orientabili sull asse anteriore Un motore fornisce la trazione (anteriore o posteriore) Un motore varia l orientamento Ruote anteriori con orientamento diverso tra di loro Ruota interna più sterzata rispetto a quella esterna (sterzo di Ackermann)
25 Veicolo omnidirezionale Introduzione alla Robotica 25/60 Tre ruote eccentriche in posizione simmetrica Velocità di trazione comandate indipendentemente Può muoversi istantaneamente in qualsiasi direzione, nonché riorientarsi sul posto
26 Ruota Mecanum Introduzione alla Robotica 26/60 Ruota fissa sulla cui circonferenza esterna sono aggiunti rulli passivi il cui asse di rotazione è inclinato (in genere 45 ) rispetto al piano della ruota Un veicolo dotato di quattro ruote Mecanum montate a coppie su due assi paralleli è anch esso omnidirezionale
27 Bilanciamento Introduzione alla Robotica 27/60 Un robot con tre ruote è in equilibrio statico se il suo baricentro cade all interno del triangolo di supporto definito dai punti di contatto delle ruote con il suolo I robot con più di tre ruote hanno un poligono di supporto (più semplice garantire il bilanciamento) In caso di superficie non perfettamente planare, è necessario dotare il veicolo di un sistema di sospensioni per mantenere il contatto di tutte le ruote
28 Spazio di lavoro Introduzione alla Robotica 28/60 Lo spazio di lavoro di un robot mobile è potenzialmente illimitato La mobilità locale di un robot mobile non omnidirezionale è sempre ristretta Un triciclo non può muoversi istantaneamente in direzione normale all asse delle ruote posteriori Al termine del movimento, il triciclo può essere manovrato in modo da ottenere uno spostamento complessivo in tale direzione Il numero dei gradi di libertà del robot (numero dei moti istantanei ammissibili) è inferiore al numero delle variabili di configurazione dello stesso
29 Manipolatore mobile Introduzione alla Robotica 29/60 Montaggio di un manipolatore su una base mobile Destrezza del braccio articolato Mobilità illimitata della base Progetto complesso Bilanciamento statico e dinamico Azionamento dei due sistemi
30 Robotica industriale Introduzione alla Robotica 30/60 La robotica industriale è la disciplina che si interessa della progettazione, del governo e delle applicazioni dei robot in ambito industriale I suoi prodotti hanno raggiunto lo stato di una tecnologia matura Robot industriali operano in un ambiente strutturato Primi robot industriali sviluppati alla confluenza di due tecnologie Macchine utensili a controllo numerico per la lavorazione automatica di precisione Teleoperatori per la manipolazione a distanza di materiali radioattivi Caratteristiche versatilità di utilizzo, grazie all'impiego di utensili di natura diversa come organo terminale del manipolatore adattabilità a situazioni non note a priori, grazie all'utilizzo di sensori precisione di posizionamento, grazie all'adozione di tecniche di controllo in retroazione ripetibilità di esecuzione, grazie alla programmabilità delle varie operazioni
31 Automazione Introduzione alla Robotica 31/60 L automazione è una tecnologia il cui obiettivo è quello di sostituire la macchina all uomo in un processo di produzione, non solo per quanto riguarda l esecuzione delle operazioni materiali, ma anche per ciò che concerne l elaborazione intelligente delle informazioni sullo stato del processo Automazione rigida (produzione in serie di grossi volumi di manufatti di caratteristiche costanti) Automazione programmabile (produzione di piccoli e medi lotti di manufatti di caratteristiche variabili) Automazione flessibile (produzione di lotti variabili di manufatti diversi)
32 Robot industriale Introduzione alla Robotica 32/60 Macchina con elevate caratteristiche di versatilità e flessibilità Un robot è una struttura meccanica multifunzionale e riprogrammabile progettato per spostare materiali, parti, utensili o dispositivi specializzati secondo movimenti variabili programmati per l esecuzione di una varietà di compiti diversi (Robot Institute of America, 1980) Componente tipico di sistemi di automazione programmabile
 Carico e scarico di magazzini Carico e scarico di macchine operatrici e macchine utensili Selezione e smistamento di parti Confezionamento di")
33 Capacità di impiego Introduzione alla Robotica 33/60 Trasporto Palettizzazione (disposizione di oggetti in maniera preordinata su un opportuno supporto raccoglitore) Carico e scarico di magazzini Carico e scarico di macchine operatrici e macchine utensili Selezione e smistamento di parti Confezionamento di merci AGV
34 Capacità di impiego Introduzione alla Robotica 34/60 Misura Collaudo dimensionale Rilevamento di profili Individuazione di difetti di fabbricazione Manipolazione (lavorazione/assemblaggio) Saldatura ad arco e a punti Verniciatura a spruzzo Fresatura e trapanatura Incollaggio Taglio laser e a getto d acqua Finitura Assemblaggio di gruppi meccanici ed elettrici Montaggio di schede elettroniche Avvitatura Cablaggio


35 Impiego di robot industriali Introduzione alla Robotica 35/60 Fonte 12/2013: World Robotics milioni di robot industriali in funzione nel mondo L anno di maggiore successo per i robot industriali dal 1961 Mercato totale: 9.5 miliardi $ (+12%) Mercato stimato: 29 miliardi $ Mercati più grandi: Giappone, Cina, USA, Corea, Germania (70%)
36 Alcuni dati sui robot industriali Introduzione alla Robotica 36/60 Vita media di un robot industriale 12 anni potrebbe arrivare a 15 anni Densità di robot per numero di operai 347 robot ogni operai in Corea 339 in Giappone 261 in Germania 149 in Italia Costo medio di un robot a sei assi Da a a seconda delle dimensioni e delle applicazioni
37 Applicazioni industriali Introduzione alla Robotica 37/60

38 Alcuni robot industriali Introduzione alla Robotica 38/60 Robot AdeptOne XL Struttura SCARA Motori ad accoppiamento diretto Sbraccio di 800 mm Ripetibilità di mm in direzione orizzontale e mm in quella verticale Velocità max 1200 mm/s per il giunto prismatico Da 650 a 3330 /s per i tre giunti rotoidali Portata di 12 kg Gamma di applicazioni Trasporto di piccole parti Assemblaggio Confezionamento

39 Alcuni robot industriali Introduzione alla Robotica 39/60 Robot COMAU Smart NS Struttura antropomorfa a sei giunti con polso sferico Sbraccio orizzontale da 1650 a 1850 mm Ripetibilità di 0.05 mm Velocità max Da 155 a 170 /s per i primi tre giunti Da 350 a 550 /s per gli ultimi tre giunti Portata da 12 a 16 kg Montaggio a pavimento o a soffitto Gamma di applicazioni Saldatura ad arco Trasporto di materiali leggeri Assemblaggio Processi tecnologici

40 Alcuni robot industriali Introduzione alla Robotica 40/60 Robot ABB IRB4400 Struttura antropomorfa a sei giunti con catena chiusa a parallelogramma Sbraccio da 1960 a 2550 mm Ripetibilità da 0.07 a 0.1 mm Velocità max all organo terminale di 2200 mm/s Portata di 60 kg Montaggio a pavimento o a parete Gamma di applicazioni Trasporto di materiali Carico e scarico di macchine Molatura Incollaggio Pressatura Stampaggio Assemblaggio

41 Alcuni robot industriali Introduzione alla Robotica 41/60 Robot KUKA KR 60 Jet Struttura a cinque assi, montato su slitta con installazione a portale Corsa dell unità lineare da 400 mm a 20 m Velocità max di 3200 mm/s Sbraccio del robot di 820 mm Ripetibilità di 0.15 mm Velocità max Da 120 a 166 /s per i primi due giunti Da 260 a 322 /s per gli ultimi tre giunti Gamma di applicazioni Carico e scarico di macchine Finitura Rivestimento Sigillatura Taglio

42 Alcuni robot industriali Introduzione alla Robotica 42/60 Robot ABB IRB340 FlexPicker Geometria parallela a quattro assi Peso ridotto e montaggio dall alto Valori record di velocità di 10 m/s e accelerazione di 100 m/s 2 Ripetibilità di 0.1 mm Carico di 1 kg Versione pulita in alluminio industria alimentare industria farmaceutica

43 Alcuni robot industriali Introduzione alla Robotica 43/60 Robot Fanuc M-16iB Struttura antropomorfa a sei giunti con polso sferico Sbraccio orizzontale da 1667 a 1885 mm Ripetibilità di 0.1 mm Velocità max da 165 a 175 /s per i primi tre giunti da 340 a 520 /s per gli ultimi tre giunti Portata da 10 a 20 kg Sensori integrati nell unita di governo Sistema di guida basato su visione 3D Sensore di forza a sei assi Gamma di applicazioni Trasporto di oggetti arbitrariamente posizionati Finitura Incollaggio Taglio a getto d acqua


44 Alcuni robot industriali Introduzione alla Robotica 44/60 Robot KUKA Lightweight Struttura a sette assi, presentato nel 2006 come il risultato di un trasferimento tecnologico da DLR Adozione di materiali in lega leggera e sensori di coppia ai giunti Sbraccio orizzontale di 868 mm Velocità ai giunti da 110 a 210 /s Carico da 7 a 14 kg, a fronte di un peso di soli 15 kg (!) Ridondanza cinematica Sicurezza intrinseca nel caso di contatto con esseri umani


45 Alcuni robot industriali Introduzione alla Robotica 45/60 Mano BarrettHand Un dito fisso e due dita mobili intorno alla base del palmo Manipolazione di oggetti di dimensione, forma e orientamento diversi Mano antropomorfa SAH Risultato di un trasferimento tecnologico da DLR e Harbin Institute of Technology (Cina) Tre dita indipendenti allineate e un dito opponibile, analogo al pollice umano Giunti delle dita dotati di sensori angolari a effetto magnetico e sensori di coppia Buona destrezza vicina alla mano umana

 Testa sensorizzata Compiti di")
46 Alcuni robot industriali Introduzione alla Robotica 46/60 Manipolatore umanoide Justin Torso a tre giunti assimilabile a struttura antropomorfa Due braccia a sette assi (tecnologia LWR) Testa sensorizzata Compiti di manipolazione bimanuale
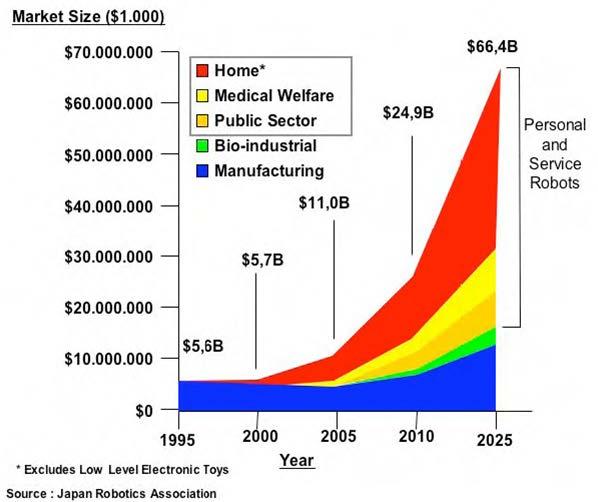


47 Le prospettive di mercato Introduzione alla Robotica 47/60
48 Robotica avanzata Introduzione alla Robotica 48/60 La robotica avanzata è la scienza che studia robot con spiccate caratteristiche di autonomia che operano in ambienti non strutturati o scarsamente strutturati, le cui caratteristiche geometriche o fisiche non siano completamente note a priori Ancora in età giovane: tecnologia non ancora matura, prevalentemente prototipi Robot per l esplorazione Necessità di ricorrere ad automi per indisponibilità dell operatore umano Motivi di sicurezza in ambienti ostili Robot di servizio Prodotti con mercati potenziali di ampie dimensioni che puntano a migliorare la qualità della vita

 2.700.000 robot per applicazioni domestiche 1.200.")
49 Robot per applicazioni non industriali Introduzione alla Robotica 49/60 Robot di servizio professionale Applicazioni militari e in campo ostile nuove installazioni nel 2013 Robot di servizio a uso personale/domestico (+20%) robot per applicazioni domestiche robot per l intrattenimento




")

50 Alcuni robot per l esplorazione Introduzione alla Robotica 50/60 Interventi in zone contaminate da gas velenosi o sostanze radioattive Interventi in scenari causati da disastri (attentati, crolli, terremoti) Esplorazione di un vulcano Esplorazione sottomarina Esplorazione spaziale Pattugliamento aereo








51 Alcuni robot di servizio Introduzione alla Robotica 51/60 Mobilità dei cittadini (ITS) Sedie a rotelle autonome Domotica Robot per la chirurgia laparoscopica Robot per diagnostica e chirurgia endoscopica Robot per la riabilitazione Robot umanoidi Robot zoomorfi









52

53 Verso il futuro Introduzione alla Robotica 53/60 Scenario a venire Robot che scompaiono La tecnologia robotica diviene ubiquitaria, distribuita e/o integrata in ambienti intelligenti proprio come i computer che stanno diventando sempre più pervasivi Sogno o realtà?


54 Libro di testo Introduzione alla Robotica 54/60


55 Textbook Introduzione alla Robotica 55/60
56 Modellistica, pianificazione e controllo Introduzione alla Robotica 56/60 Modellistica Cinematica (Cap. 2) Cinematica differenziale (Cap. 3) Dinamica (Cap. 7) Robot mobili (Cap. 11) Pianificazione Pianificazione di traiettorie (Cap. 4) Pianificazione del moto (Cap. 12) Controllo Attuatori e sensori (Cap. 5) Unità di governo (Cap. 6) Controllo del moto (Cap. 8) Controllo di forza (Cap. 9) Controllo visuale (Cap. 10) Algebra lineare (App. A) Meccanica dei corpi rigidi (App. B) Geometria differenziale (App. D) Algoritmi di ricerca su grafo (App. E) Controllo in retroazione (App. C)
 9 Introduzione alla Robotica 57/60 B C D E Robot Structures (F. Park) Sensing and Perception (H. Christensen) Manipulation and Interfaces (M. Kaneko) Mobile and Distributed Robotics (R.")
57 A Springer Handbook of Robotics B. Siciliano & O. Khatib (Editors) PROSE Awards for Excellence in Physical Sciences & Mathematics + Engineering & Technology (February 2009) Robotics Foundations (D. Orin) 9 Introduzione alla Robotica 57/60 B C D E Robot Structures (F. Park) Sensing and Perception (H. Christensen) Manipulation and Interfaces (M. Kaneko) Mobile and Distributed Robotics (R. Chatila) F Field and Service Robotics (A. Zelinsky) 14 VII G Human-Centered Human-Centered and and Life-Like Life-Like Robotics Robotics (D. Rus) (Rus) 8
58 2 nd Edition in progress expected to be published in 2016











































59 i robot sono con noi, dentro di noi e tra di noi
![Grazie [:] Introduzione alla Robotica 60/60 IL TEAM](/docs-images/62/47658031/images/60-5.jpg "Bruno Siciliano Luigi Villani Vincenzo Lippiello Alberto")



60 Grazie [:] Introduzione alla Robotica 60/60 IL TEAM Bruno Siciliano Luigi Villani Vincenzo Lippiello Alberto Finzi Silvia Rossi Franco Cutugno Fanny Ficuciello Fabio Ruggiero Agostino De Santis Rafik Mebarki Antoine Petit Jun Nishiyama Alejandro Donaire Aykut Satıcı Francesca Cordella Mariacarla Staffa Daniela D'Auria Luca Buonocore Jonathan Cacace Diana Serra Mahdi Momeni Andrea Fontanelli Valeria Federico Jonathan van der Meer FINANZIAMENTI 8.5 M
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali
 Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Studio di macchine che possano sostituire l'uomo nell'esecuzione di un compito, sia in termini di attività fisica che decisionale Radici culturali Mitologia Automa Robot (robota = lavoro esecutivo) Letteratura
Controllo dei robot. I testi. Introduzione al corso. Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot
 Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei robot Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Sito web con materiale aggiuntivo: home.dei.polimi.it/rocco/controllorobot Controllo dei robot - Introduzione
Controllo dei Robot. Corso di Controllo dei Robot Introduzione. Paolo Lino. Dipartimento di Ing. Elettrica e dell Informazione (DEI)
") Corso di Controllo dei Robot Introduzione Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Introduzione - La robotica La robotica è un settore relativamente giovane della tecnologia
Corso di Controllo dei Robot Introduzione Paolo Lino Dipartimento di Ing. Elettrica e dell Informazione (DEI) Introduzione - La robotica La robotica è un settore relativamente giovane della tecnologia
Introduzione alla Robotica
 1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
1/43 Introduzione alla Robotica Fabrizio Caccavale AREA Lab Scuola di Ingegneria Università degli Studi della Basilicata fabrizio.caccavale@unibas.it Si ringrazia il Prof. Bruno Siciliano per aver fornito
Introduzione al corso
 Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Introduzione al corso Introduzione Def. di Robotica e Robot, Robotica industriale, Classificazione dei robot, Applicazioni, Mercato della Robotica Cinematica (relazioni tra posizioni dei giunti e posizione
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Introduzione al Corso
 Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Anno accademico 2005/2006 Prof. Giovanni Muscato Introduzione al Corso Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi Università degli Studi di Catania Viale A. Doria 6, 95125, Catania,
Controllo del moto e robotica industriale
 Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Controllo del moto e robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) Obiettivi del corso Il corso si propone di affrontare problemi di controllo del moto relativi sia
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
001/1 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ 001/2 Quando pensiamo ai robot pensiamo a (1) Metropolis (1927)
Introduzione al controllo
 Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Corso di Robotica 2 Introduzione al controllo Prof. Alessandro De Luca A. De Luca Cosa vuol dire controllare un robot? si possono dare diversi livelli di definizione completare con successo un programma
Robotica: Errata corrige
 Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Robotica: Errata corrige Capitolo 1: Introduzione pag. 13: Nella nota 2, la frase Il dispositivo che ripartisce adeguatamente la velocità è il differenziale. va modificata come segue: Il dispositivo che
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica
 Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Laboratorio di Automatica Alcuni temi per tesi BIAR in Automazione e Robotica Prof. Alessandro De Luca deluca@diag.uniroma1.it Laboratorio di Automatica 25.2.2016 Sommario - 1! esperimenti con un sensore
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023
 Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Robotica - 01CFIDV, 02CFICY docente: prof. Basilio BONA tel. 7023 basilio.bona@polito.it www.ladispe.polito.it/meccatronica/01cfi/ Lucidi 001/2005 Robotica 01CFI AA 2004/05 Basilio Bona DAUIN Politecnico
Inversione della cinematica differenziale
 CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
CINEMATICA DIFFERENZIALE relazioni tra velocità dei giunti e velocità dell organo terminale Jacobiano geometrico Jacobiano analitico Singolarità cinematiche Analisi della ridondanza Inversione della cinematica
I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri sono impianti dedicati alla lavorazione e
Sistemi di produzione discreti Sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri Lez. 2 - Sistemi manifatturieri 1 I sistemi manifatturieri I sistemi
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di Sistemi di movimentazione Robot industriali I sistemi manifatturieri Lez. 2 - Sistemi manifatturieri 1 I sistemi manifatturieri I sistemi
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di INGEGNERIA Registro delle Lezioni del Corso di CONTROLLO DEI ROBOT Corso di Laurea Magistrale in Ingegneria dell Automazione Dettate dal Prof. Bruno
 Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Jacopo Sini 1 Concetti di base v 1.0 - Torino, 05/07/2015 ROBOTICS@MIDDLESCHOOL Software e acquisizione dati Sensori e attuatori Analisi dei segnali Meccatronica Sistemi informatici e logici Modellizzazion
Lezione 2: I problemi fondamentali. Per capire meglio i problemi
 Robotica Industriale Lezione 2: I problemi fondamentali Per capire meglio i problemi Diamo un occhiata a cosa si fa con i robot industriali Cerchiamo di capire quali siano le esigenze del lavoro che devono
Robotica Industriale Lezione 2: I problemi fondamentali Per capire meglio i problemi Diamo un occhiata a cosa si fa con i robot industriali Cerchiamo di capire quali siano le esigenze del lavoro che devono
Cinematica dei robot
 Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Corso di Robotica 1 Cinematica dei robot Prof. Alessandro De Luca Robotica 1 1 Cinematica dei robot manipolatori Studio degli aspetti geometrici e temporali del moto delle strutture robotiche, senza riferimento
Robot Mobili su Ruote Generalità e Cinematica
 Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
Corso di Robotica 1 Robot Mobili su Ruote Generalità e Cinematica Prof. Alessandro De Luca Robotica 1 1 introduzione Sommario robot mobili su ruote (WMR = Wheeled Mobile Robot) ambienti operativi il problema
PALLETTIZZATORI CARTESIANI SERIE PCS
 PALLETTIZZATORI CARTESIANI CON TELAIO PERIMETRALE Nel presente documento presentiamo le due serie di pallettizzatori cartesiani applicati ad un telaio di forma parallelepipeda. Queste serie di macchine
PALLETTIZZATORI CARTESIANI CON TELAIO PERIMETRALE Nel presente documento presentiamo le due serie di pallettizzatori cartesiani applicati ad un telaio di forma parallelepipeda. Queste serie di macchine
I.I.S.S. G. Marconi Bari. Istituto Tecnico settore Tecnologico :: Liceo Scientifico opzione Scienze applicate. Il Robot a scuola
 Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Il Robot a scuola Un approfondimento sui Robot industriali Classificazione dei Robot industriali Classificazione Cinematica Funzionale Operativa Dinamica Sensoriale Criterio Caratteristiche geometriche
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica
 Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Corso di Percezione Robotica Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di meccanica
Lezione 3: Le strutture cinematiche. Vari modi per fare un braccio
 Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Robotica Industriale Lezione 3: Le strutture cinematiche Vari modi per fare un braccio Tre G.D.L. traslazionali e tre rotazionali Robot cartesiano Esempio 2 1 Vari modi per fare un braccio Due G.D.L. traslazionali
Sistemi di produzione discreti. Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali. I sistemi manifatturieri
 Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri I sistemi manifatturieri sono impianti
Sistemi di produzione discreti Sistemi manifatturieri Sistemi di trasporto Sistemi di movimentazione Robot industriali I sistemi manifatturieri I sistemi manifatturieri I sistemi manifatturieri sono impianti
Lezione 2: Applicazioni di robot industriali e. problemi
 Robotica Robot Industriali e di Servizio Lezione 2: Applicazioni di robot industriali e Comunicazione: Lezione del mercoledì spostata alle 12:00 (puntuali!) in aula B19. Intervalli ridotti (L!!) 2 1 Per
Robotica Robot Industriali e di Servizio Lezione 2: Applicazioni di robot industriali e Comunicazione: Lezione del mercoledì spostata alle 12:00 (puntuali!) in aula B19. Intervalli ridotti (L!!) 2 1 Per
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica
 Modulo B. Fondamenti di Robotica") Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Corso di Percezione Robotica (PRo) Modulo B. Fondamenti di Robotica Fondamenti di meccanica e cinematica dei robot Cecilia Laschi cecilia.laschi@sssup.it Modulo B. Fondamenti di Robotica Fondamenti di
Esami di stato a.s. 2007/2008
 Esami di stato a.s. 2007/2008 Progetto realizzato dagli alunni: Mirra Luca, Ornaghi Jonathan, Ripamonti Ermes Docenti responsabili: Prof.ri P. Franzosa, G. Rizzaro I.T.I.S. P. Hensemberger Classe V, corso
Esami di stato a.s. 2007/2008 Progetto realizzato dagli alunni: Mirra Luca, Ornaghi Jonathan, Ripamonti Ermes Docenti responsabili: Prof.ri P. Franzosa, G. Rizzaro I.T.I.S. P. Hensemberger Classe V, corso
C-GAMMA LABORATORIO FOTOMETRICO
 Descrizione generale Il mod. è un sistema completo per la caratterizzazione luminosa di componenti ottici di uso civile ed industriale. Esso consente la misura di qualsiasi tipologia di apparecchio di
Descrizione generale Il mod. è un sistema completo per la caratterizzazione luminosa di componenti ottici di uso civile ed industriale. Esso consente la misura di qualsiasi tipologia di apparecchio di
LE NUOVE FRONTIERE DELLA ROBOTICA
 LE NUOVE FRONTIERE DELLA ROBOTICA Relatore: prof. Alessandro Gasparetto Venerdì 24 febbraio 2017, ore 16.00 #Sharing3FVG Webinar realizzato da IALFVG e parte degli 80 di #Sharing3FVG, progetto cofinanziato
LE NUOVE FRONTIERE DELLA ROBOTICA Relatore: prof. Alessandro Gasparetto Venerdì 24 febbraio 2017, ore 16.00 #Sharing3FVG Webinar realizzato da IALFVG e parte degli 80 di #Sharing3FVG, progetto cofinanziato
IMPEX TECNICHE LINEARI SRL 05/16.
 I prodotti MOVITEC trovano impiego in moltissime applicazioni industriali e la struttura aziendale è in grado di soddisfare le moltissime richieste dei clienti. Automotive Imballaggi Manipolazione Taglio
I prodotti MOVITEC trovano impiego in moltissime applicazioni industriali e la struttura aziendale è in grado di soddisfare le moltissime richieste dei clienti. Automotive Imballaggi Manipolazione Taglio
METTIFALDA A COLONNA
 PALLETTIZZAZIONE METTIFALDA Solaut produce posizionatori di interfalde per singola baia di pallettizzazione oppure sistemi che posizionano l interfalda, prelevata da un unico magazzino, su più stazioni
PALLETTIZZAZIONE METTIFALDA Solaut produce posizionatori di interfalde per singola baia di pallettizzazione oppure sistemi che posizionano l interfalda, prelevata da un unico magazzino, su più stazioni
Robotica Modellistica, pianificazione e controllo
 Bruno Siciliano è professore di Automatica presso l Università di Napoli Federico II. Lorenzo Sciavicco è professore di Automatica presso l Università di Roma Tre. Luigi Villani è professore di Automatica
Bruno Siciliano è professore di Automatica presso l Università di Napoli Federico II. Lorenzo Sciavicco è professore di Automatica presso l Università di Roma Tre. Luigi Villani è professore di Automatica
Attuatori lineari. Affidabili Compatti Precisi
 cyber force Attuatori lineari Affidabili Compatti Precisi 163 Le vostre applicazioni WITTENSTEIN Utilizzo senza confini Inserimento Attuatori lineari con elevato grado di ripetibilità, ideali per processi
cyber force Attuatori lineari Affidabili Compatti Precisi 163 Le vostre applicazioni WITTENSTEIN Utilizzo senza confini Inserimento Attuatori lineari con elevato grado di ripetibilità, ideali per processi
Cosa si intende per Intelligent Assist Device. Assist Device o. Intelligent. Secondo la definizione fornita dalla Robotics Industry Association un
 Cosa si intende per Intelligent Assist Device Un Intelligent Assist Device è un manipolatore industriale intelligente. che permette all operatore di manipolare, con uno sforzo quasi nullo, qualsiasi oggetto
Cosa si intende per Intelligent Assist Device Un Intelligent Assist Device è un manipolatore industriale intelligente. che permette all operatore di manipolare, con uno sforzo quasi nullo, qualsiasi oggetto
KUKA LeichtBau-Roboter LightWeight-Robot
 KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
KUKA LeichtBau-Roboter LightWeight-Robot Un Trasferimento di tecnologie tra DLR e KUKA Roboter GmbH 1 LBR Mauro Baima 20090428 Pag. 1 Mauro Baima Technical Support Manager Robotics Division Via Pavia 9A/6
Robotica industriale. Introduzione al corso. Prof. Paolo Rocco (paolo.rocco@polimi.it)
") Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Robotica industriale Introduzione al corso Prof. Paolo Rocco (paolo.rocco@polimi.it) I testi Testo di riferimento Testo per la parte di controllo del moto Sito web con materiale aggiuntivo: http://www.elet.polimi.it/upload/rocco/robotica
Progettazione meccanica: dalla scelta dei componenti di base alla realizzazione del sistema cartesiano completo. Andrea Piatti Bosch Rexroth S.p.A.
 Progettazione meccanica: dalla scelta dei componenti di base alla realizzazione del sistema cartesiano completo Andrea Piatti Bosch Rexroth S.p.A. Meccatronica Livello di performance Molto elevato Macchine
Progettazione meccanica: dalla scelta dei componenti di base alla realizzazione del sistema cartesiano completo Andrea Piatti Bosch Rexroth S.p.A. Meccatronica Livello di performance Molto elevato Macchine
Progetto e Realizzazione di un Robot a Cinematica Parallela per Applicazioni Mediche
 Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
Università degli Studi di Brescia Facoltà di Ingegneria Corso di Dottorato in Meccanica Applicata XVII Ciclo Presentazione finale di Diego Tosi Progetto e Realizzazione di un Robot a Cinematica Parallela
ISTITUTO ISTRUZIONE SUPERIORE G. Vallauri FOSSANO (CN) DIPARTIMENTO di MECCANICA. Descrizione e finalità
 DIPARTIMENTO di MECCANICA. Descrizione e finalità") Descrizione e finalità Autonomous Guenda Vall è un veicolo robotizzato in grado di muoversi e monitorare l ambiente circostante in modalità autonoma oppure telecontrollata con la finalità di esplorare
Descrizione e finalità Autonomous Guenda Vall è un veicolo robotizzato in grado di muoversi e monitorare l ambiente circostante in modalità autonoma oppure telecontrollata con la finalità di esplorare
Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo tra di loro;
 (pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
(pp. 12-27) Numero dei gradi di libertà dei meccanismi Sistemi meccanici e meccanismi Alcune definizioni utili: - MECCANISMO: sistema meccanico composto da più corpi che hanno la possibilità di moto relativo
ITS MAKER Modulo industrializzazione di prodotto. Modena, febbraio 2017
 ITS MAKER Modulo industrializzazione di prodotto Modena, febbraio 2017 Design for assembly-caratteristiche I prodotti sono progettati in generale seguendo 6 particolari criteri Minimo costo. I singoli
ITS MAKER Modulo industrializzazione di prodotto Modena, febbraio 2017 Design for assembly-caratteristiche I prodotti sono progettati in generale seguendo 6 particolari criteri Minimo costo. I singoli
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE E DELL'INFORMAZIONE anno accademico 2015/16 Registro lezioni del docente DE FALCO DOMENICO Attività didattica MECCANICA APPLICATA ALLE MACCHINE [A14099] Periodo di
COMAU ROBOTICA. Flessibilità. Ing. Arturo Baroncelli Comau S.p.A. CORSO INTRODUTTIVO AUTOMAZIONE INDUSTRIALE E ROBOTICA Dr. Ing.
 COMAU ROBOTICA Flessibilità Flessibilità negli impianti di saldatura Dr. Ing. Ing. Arturo Baroncelli Comau S.p.A. CORSO INTRODUTTIVO AUTOMAZIONE INDUSTRIALE E ROBOTICA 2009 SIRI Associazione Italiana di
COMAU ROBOTICA Flessibilità Flessibilità negli impianti di saldatura Dr. Ing. Ing. Arturo Baroncelli Comau S.p.A. CORSO INTRODUTTIVO AUTOMAZIONE INDUSTRIALE E ROBOTICA 2009 SIRI Associazione Italiana di
MACCHINA TRANSFER AD ALTE PRESTAZIONI
 INDICE: TRANSFER - Componenti - Moduli - Tecnologia L evoluzione tecnologica, le nuove normative sugli ottoni senza piombo, la necessità sempre presente di aumentare efficienza e produttività delle nostre
INDICE: TRANSFER - Componenti - Moduli - Tecnologia L evoluzione tecnologica, le nuove normative sugli ottoni senza piombo, la necessità sempre presente di aumentare efficienza e produttività delle nostre
motors - Servomotori per applicazioni speciali Potenti Compatti Efficienti
 cyber motors - Servomotori per applicazioni speciali Potenti Compatti Efficienti 177 I nostri principi Know-how completo per servomotori a magneti permanenti - Azionamenti rotativi - Attuatori lineari
cyber motors - Servomotori per applicazioni speciali Potenti Compatti Efficienti 177 I nostri principi Know-how completo per servomotori a magneti permanenti - Azionamenti rotativi - Attuatori lineari
FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: luigi.biagiotti@unimore.it
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html FONDAMENTI DI CONTROLLI AUTOMATICI INTRODUZIONE Ing. e-mail: luigi.biagiotti@unimore.it
CIM Computer Integrated Manufacturing
 INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
INDICE CIM IN CONFIGURAZIONE BASE CIM IN CONFIGURAZIONE AVANZATA CIM IN CONFIGURAZIONE COMPLETA DL CIM A DL CIM B DL CIM C DL CIM C DL CIM A DL CIM B Il Computer Integrated Manufacturing (CIM) è un metodo
Lezione 22 Ancora strutture per i robot mobili 13 maggio
 Robotica Robot Industriali e di Servizio Lezione 22: Ancora strutture per i robot Strutture con ruote Anche se le ruote hanno molti difetti, sono il modo più semplice per spostare qualcosa 2 1 Quante ruote?
Robotica Robot Industriali e di Servizio Lezione 22: Ancora strutture per i robot Strutture con ruote Anche se le ruote hanno molti difetti, sono il modo più semplice per spostare qualcosa 2 1 Quante ruote?
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof Paolo Rocco (paolorocco@polimiit) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof Paolo Rocco (paolorocco@polimiit) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato per
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Micro-pinze parallele HGPM
 A07_04_001_E-HGPM! Miniaturizzate e facili da montare! Versatili e disponibili in diverse varianti 2007/03 Con riserva di modifiche Prodotti 2007 1/-1 A07_04_002_F-HGPM Caratteristiche G6: G7: G9: Con
A07_04_001_E-HGPM! Miniaturizzate e facili da montare! Versatili e disponibili in diverse varianti 2007/03 Con riserva di modifiche Prodotti 2007 1/-1 A07_04_002_F-HGPM Caratteristiche G6: G7: G9: Con
Dati tecnici. Fresa a freddo elettrica W 350 E
 Dati tecnici Fresa a freddo elettrica W 350 E Dati tecnici Larghezza di fresatura max. Profondità di fresatura* 1 Rullo di fresatura Interlinea 350 mm 0 100 mm 12 mm Numero denti di fresatura 38 Diametro
Dati tecnici Fresa a freddo elettrica W 350 E Dati tecnici Larghezza di fresatura max. Profondità di fresatura* 1 Rullo di fresatura Interlinea 350 mm 0 100 mm 12 mm Numero denti di fresatura 38 Diametro
[ significa: Pensato per grandi imprese! EMCOTURN 900. Tornio CNC per diametro tornibile fino a 1050 mm e lunghezza tornibile fino a 5000 mm
 [ E[M]CONOMY] significa: Pensato per grandi imprese! EMCOTURN 900 Tornio CNC per diametro tornibile fino a 1050 mm e lunghezza tornibile fino a 5000 mm EMCOTURN 900 [Mandrino principale] - Attacco mandrino
[ E[M]CONOMY] significa: Pensato per grandi imprese! EMCOTURN 900 Tornio CNC per diametro tornibile fino a 1050 mm e lunghezza tornibile fino a 5000 mm EMCOTURN 900 [Mandrino principale] - Attacco mandrino
Fondamenti di robotica
 Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
Fondamenti di robotica Introduzione al corso Prof. Gianantonio Magnani (gianantonio.magnani@polimi.it) Robotica avanzata e industriale Robotica studia le macchine che possano sostituire l uomo nell esecuzione
LA MECCATRONICA E L AUTOMAZIONE PER LA FABBRICA DEL FUTURO
 LA MECCATRONICA E L AUTOMAZIONE PER LA FABBRICA DEL FUTURO Prof. Alessandro Gasparetto gasparetto@uniud.it Workshop Verso la fabbrica intelligente Udine, 27 Novembre 2014 Che cos è la meccatronica? La
LA MECCATRONICA E L AUTOMAZIONE PER LA FABBRICA DEL FUTURO Prof. Alessandro Gasparetto gasparetto@uniud.it Workshop Verso la fabbrica intelligente Udine, 27 Novembre 2014 Che cos è la meccatronica? La
TORNI CNC MULTIMANDRINO. SCY HT a sei mandrini
 PASSIONE E INNOVAZIONE multimandrini TORNI CNC MULTIMANDRINO SCY 36-45-5656 HT a sei mandrini SCY 36 HT SCY 45 HT SCY 56 HT Economici Affidabili Efficenti Multimandrino = più produzione A 30 anni dalla
PASSIONE E INNOVAZIONE multimandrini TORNI CNC MULTIMANDRINO SCY 36-45-5656 HT a sei mandrini SCY 36 HT SCY 45 HT SCY 56 HT Economici Affidabili Efficenti Multimandrino = più produzione A 30 anni dalla
Sistemi di manipolazione: Dal sistema di presa alla soluzione completa
 Sistemi di manipolazione: Dal sistema di presa alla soluzione completa Claudio Ghirimoldi Florinda Salomone Si parte da... Qualsiasi prodotto o utensile tra 1 gr e 100kg da spostare Si sceglie il sistema
Sistemi di manipolazione: Dal sistema di presa alla soluzione completa Claudio Ghirimoldi Florinda Salomone Si parte da... Qualsiasi prodotto o utensile tra 1 gr e 100kg da spostare Si sceglie il sistema
L'evoluzione dei sistemi produttivi per telai e carrozzerie automobilistiche
 COMAU ROBOTICA L'evoluzione dei sistemi produttivi per telai e carrozzerie automobilistiche Problematiche nell'integrazione del sistema produttivo Dr. Ing.. Arturo Baroncelli Comau S.p.A. Sistemi di Saldatura
COMAU ROBOTICA L'evoluzione dei sistemi produttivi per telai e carrozzerie automobilistiche Problematiche nell'integrazione del sistema produttivo Dr. Ing.. Arturo Baroncelli Comau S.p.A. Sistemi di Saldatura
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico (ing. M. Troncossi)
") MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
MECCANICA DEI ROBOT E DELLE MACCHINE AUTOMATICHE LM Anno accademico 2015-2016 (ing. M. Troncossi) Conoscenze e abilità da conseguire Lo studente acquisisce gli strumenti necessari per effettuare un'analisi
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
oikos centro di lavoro a 6 assi per travi e moduli parete oikos
 oikos centro di lavoro a 6 assi per travi e moduli parete oikos oikos centro di lavoro a 6 assi per travi e moduli pareti. Centro di lavoro a 6 assi, soluzione tecnologica ottimale per la lavorazione di
oikos centro di lavoro a 6 assi per travi e moduli parete oikos oikos centro di lavoro a 6 assi per travi e moduli pareti. Centro di lavoro a 6 assi, soluzione tecnologica ottimale per la lavorazione di
Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici
 Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Automation Robotics and System CONTROL Università degli Studi di Modena e Reggio Emilia Corso di laurea in Ingegneria Meccatronica Controlli Automatici e Azionamenti Elettrici CA-01-INTRODUZIONE Cesare
Soluzioni Tecnologiche Automatizzate
 Progettare e costruire macchine automatiche è la nostra passione, va al di là dei numeri, è la continua ricerca di innovazione, è il rapporto di e di collaborazione con i clienti, con le persone, è lo
Progettare e costruire macchine automatiche è la nostra passione, va al di là dei numeri, è la continua ricerca di innovazione, è il rapporto di e di collaborazione con i clienti, con le persone, è lo
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 5
 Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
METTIFOGLIO A COLONNA ACRAB-C
 CARICATORI FOGLI Apiel produce tre famiglie di prodotti utilizzati per il posizionamento di fogli in carta, cartone, plastica o metallo sopra il tavoli di lavoro di macchine per lavorazioni successive.
CARICATORI FOGLI Apiel produce tre famiglie di prodotti utilizzati per il posizionamento di fogli in carta, cartone, plastica o metallo sopra il tavoli di lavoro di macchine per lavorazioni successive.
Informazioni e Programma
 Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Corso di Robotica 1 Informazioni e Programma Prof. Alessandro De Luca Robotica 1 1 Robotica 1 2009/10 Primo semestre Mercoledì 30 Settembre Venerdì 18 Dicembre 2009 Corsi di laurea Laurea in Ingegneria
Meccanica dei Manipolatori. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
Meccanica dei Manipoatori Corso di Robotica Prof. Davide Brugai Università degi Studi di Bergamo Definizione di robot industriae Un robot industriae è un manipoatore mutifunzionae riprogrammabie, comandato
TENSOR REVO HIGHER TORQUE MODELS. Compatto e leggero, fino a Nm!
 TENSOR REVO HIGHER TORQUE MODELS Compatto e leggero, fino a 4.000 Nm! LA PRIORITÀ NELL INDUSTRIA: PRODUTTIVITÀ GLOBALE Produttività totale = massimizzazione del rapporto output / input, tenendo conto di
TENSOR REVO HIGHER TORQUE MODELS Compatto e leggero, fino a 4.000 Nm! LA PRIORITÀ NELL INDUSTRIA: PRODUTTIVITÀ GLOBALE Produttività totale = massimizzazione del rapporto output / input, tenendo conto di
Riduttori epicicloidali a gioco ridotto Linea General
 Riduttori epicicloidali a gioco ridotto Linea General alpha Value Line Talenti individuali Riduttore epicicloidale a gioco ridotto con albero (P, PL, PS, PR) o flangia in uscita (PT)) Funzionamento ciclico
Riduttori epicicloidali a gioco ridotto Linea General alpha Value Line Talenti individuali Riduttore epicicloidale a gioco ridotto con albero (P, PL, PS, PR) o flangia in uscita (PT)) Funzionamento ciclico
Robotica Industriale
 Corso di Robotica 1 Robotica Industriale Prof. Alessandro De Luca Robotica 1 1 Cosa è un robot? definizione industriale (RIA - SIRI) manipolatore programmabile multiscopo per la movimentazione di materiali,
Corso di Robotica 1 Robotica Industriale Prof. Alessandro De Luca Robotica 1 1 Cosa è un robot? definizione industriale (RIA - SIRI) manipolatore programmabile multiscopo per la movimentazione di materiali,
Fresatrici. Macchine per la lavorazione di profili in alluminio e in PVC. Macchine interamente progettate e costruite in Italia
 Fresatrici Macchine per la lavorazione di profili in alluminio e in PVC Macchine interamente progettate e costruite in Italia L AZIENDA Pertici Industries è stata fondata nel 1965 da Leto Pertici con il
Fresatrici Macchine per la lavorazione di profili in alluminio e in PVC Macchine interamente progettate e costruite in Italia L AZIENDA Pertici Industries è stata fondata nel 1965 da Leto Pertici con il
AUTOMAZIONE INDUSTRIALE. Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari
 AUTOMAZIONE INDUSTRIALE Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari Contenuti - I sistemi di produzione - Alcuni cenni storici - La produzione di tipo discreto
AUTOMAZIONE INDUSTRIALE Prof. Maria Pia Fanti Dipartimento di Elettrotecnica ed Elettronica Politecnico di Bari Contenuti - I sistemi di produzione - Alcuni cenni storici - La produzione di tipo discreto
CENTRO DI LAVORO ORIZZONTALE ZPS H 1000
 CENTRO DI LAVORO ORIZZONTALE ZPS H 1000 CARATTERISTICHE TECNICHE CORSE E AVANZAMENTI Asse X (montante) 1400 mm Asse Y (testa-mandrino) 1050 mm Asse Z (tavola) 1200 mm Avanzamento di lavoro assi X,Y,Z 50
CENTRO DI LAVORO ORIZZONTALE ZPS H 1000 CARATTERISTICHE TECNICHE CORSE E AVANZAMENTI Asse X (montante) 1400 mm Asse Y (testa-mandrino) 1050 mm Asse Z (tavola) 1200 mm Avanzamento di lavoro assi X,Y,Z 50
Soluzioni Tecnologiche Automatizzate
 Progettare e costruire macchine automatiche è la nostra passione, va al di là dei numeri, è la continua ricerca di innovazione, è il rapporto di fiducia e di collaborazione con i clienti, con le persone,
Progettare e costruire macchine automatiche è la nostra passione, va al di là dei numeri, è la continua ricerca di innovazione, è il rapporto di fiducia e di collaborazione con i clienti, con le persone,
CENTRO DI LAVORO VERTICALE ZPS MCFV 1060 STANDARD
 CENTRO DI LAVORO VERTICALE ZPS MCFV 1060 STANDARD Questo centro di tornitura verticale MCFV 1060 comprende tutte le serie tecnologiche, dalla tornitura ad alta velocità fino alla tornitura a spinta. La
CENTRO DI LAVORO VERTICALE ZPS MCFV 1060 STANDARD Questo centro di tornitura verticale MCFV 1060 comprende tutte le serie tecnologiche, dalla tornitura ad alta velocità fino alla tornitura a spinta. La
PROF. RAFFAELE IERVOLINO
 PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
PROF. RAFFAELE IERVOLINO ESERCITAZIONI di LABORATORIO DI FONDAMENTI DI SISTEMI DINAMICI modulo integrativo dell insegnamento di Fondamenti di Sistemi Dinamici (del Prof. G. Celentano) per gli allievi del
I dati di alcuni esercizi sono differenziati secondo il numero di matricola. u rappresenta l ultima cifra del numero matricola.
 I Prova in Itinere del orso di MENI PPLIT LLE MHINE L - nno ccademico 009-00 ognome Nome Matricola I dati di alcuni esercizi sono differenziati secondo il numero di matricola u rappresenta l ultima cifra
I Prova in Itinere del orso di MENI PPLIT LLE MHINE L - nno ccademico 009-00 ognome Nome Matricola I dati di alcuni esercizi sono differenziati secondo il numero di matricola u rappresenta l ultima cifra
I SISTEMI AUTOMATICI
 I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
I SISTEMI AUTOMATICI GENERALITA I sistemi automatici trovano la più ampia diffusione in tutti i settori: dalle linee di produzione; ai mezzi di trasporto; alle applicazioni civili;... CARATTERISTICHE RICHIESTE
TLY MODULI LINEARI MOTORIZZABILI
 TLY MODULI LINEARI MOTORIZZABILI La famiglia di prodotti TLY è stata progettata ricercando elevate prestazioni, qualità e semplicità costruttiva. Vengono utilizzati estrusi in alluminio autoportanti su
TLY MODULI LINEARI MOTORIZZABILI La famiglia di prodotti TLY è stata progettata ricercando elevate prestazioni, qualità e semplicità costruttiva. Vengono utilizzati estrusi in alluminio autoportanti su
PINZE A DUE DITA SERIE IRP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIANI INCLINATI FLANGIA DIN/ISO
 SERIE IRP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIANI INCLINATI FLANGIA DIN/ISO Kip2IRP.pdf Edizione 12-00 Caratteristiche Installabili direttamente robot con flangia DIN/ISO
SERIE IRP PINZE PNEUMATICHE PARALLELE A DUE DITA SU GUIDA SCORREVOLE AZIONATE DA PIANI INCLINATI FLANGIA DIN/ISO Kip2IRP.pdf Edizione 12-00 Caratteristiche Installabili direttamente robot con flangia DIN/ISO
Centri di taglio. Macchine per la lavorazione di profili in alluminio e in PVC. Macchine interamente progettate e costruite in Italia
 Centri di taglio Macchine per la lavorazione di profili in alluminio e in PVC Macchine interamente progettate e costruite in Italia L AZIENDA Pertici Industries è stata fondata nel 1965 da Leto Pertici
Centri di taglio Macchine per la lavorazione di profili in alluminio e in PVC Macchine interamente progettate e costruite in Italia L AZIENDA Pertici Industries è stata fondata nel 1965 da Leto Pertici
Fresatura. Taglio e rifilatura. modelli e stampi. materiale composito. Carteggiatura
 è una società di ingegneria specializzata in automazione industriale e robotica. Per il settore della nautica e del materiale composito, offre servizi di consulenza e progettazione di macchine per l'automazione
è una società di ingegneria specializzata in automazione industriale e robotica. Per il settore della nautica e del materiale composito, offre servizi di consulenza e progettazione di macchine per l'automazione
Controlli automatici per la meccatronica
 Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
Controlli automatici per la meccatronica Applicazione alla robotica industriale Prof. Paolo Rocco (paolo.rocco@polimi.it) Il robot Il robot è un manipolatore multifunzionale riprogrammabile, progettato
CHRONO PRODUTTIVITA E FLESSIBILITA
 CARATTERISTICHE TECNICHE GENERALI Numero di centri di Lavoro N 2 / 3 / 4 Numero di tavole porta pezzo ( una carico - scarico pezzo ) N 3 / 4 / 5 Ingombro massimo Diametro x Altezza mm 490 x 300 Carico
CARATTERISTICHE TECNICHE GENERALI Numero di centri di Lavoro N 2 / 3 / 4 Numero di tavole porta pezzo ( una carico - scarico pezzo ) N 3 / 4 / 5 Ingombro massimo Diametro x Altezza mm 490 x 300 Carico
Corso di Automazione industriale
 Corso di Automazione industriale Lezione 10 Macchine utensili e controllo numerico Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Introduzione
Corso di Automazione industriale Lezione 10 Macchine utensili e controllo numerico Introduzione Università degli Studi di Bergamo, Automazione Industriale, A.A. 2016/2017, A. L. Cologni 1 Introduzione
Modulo 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria
 Progettazione Disciplinare 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria Segmento 01 : Principio di omogeneità Presentazione: il modulo è propedeutico agli argomenti che
Progettazione Disciplinare 01: Omogeneizzazione della classe Sistemi di misura Richiami di trigonometria Segmento 01 : Principio di omogeneità Presentazione: il modulo è propedeutico agli argomenti che
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
BICICLETTE ELETTRICHE PRODOTTE IN ITALIA
 BICICLETTE ELETTRICHE PRODOTTE IN ITALIA Scoiattolo Il modello Scoiattolo è un triciclo da trasporto a tre ruote, che sfrutta la forza muscolare umana con l assistenza di un motore elettrico, dedicato
BICICLETTE ELETTRICHE PRODOTTE IN ITALIA Scoiattolo Il modello Scoiattolo è un triciclo da trasporto a tre ruote, che sfrutta la forza muscolare umana con l assistenza di un motore elettrico, dedicato
di manipolatori seriali
 Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
Cinematica i diretta ed inversa di manipolatori seriali Robotica I Marco Gabiccini AA A.A. 2009/2010 LS Ing. Meccanica ed Automazione Struttura meccanica Struttura meccanica costituita da insieme di: corpi
CENTRO DI LAVORO VERTICALE ZPS MCFV 2080 STANDARD
 CENTRO DI LAVORO VERTICALE ZPS MCFV 2080 STANDARD Questo centro di tornitura verticale MCFV 2080 è una macchina ad alto rendimento per la completa tornitura a truciolo. Il piano di lavoro la cui superficie
CENTRO DI LAVORO VERTICALE ZPS MCFV 2080 STANDARD Questo centro di tornitura verticale MCFV 2080 è una macchina ad alto rendimento per la completa tornitura a truciolo. Il piano di lavoro la cui superficie
OLEODINAMICA, OLEOIDRAULICA, IDRAULICA. Tecnologia affine alla pneumatica caratterizzata dai seguenti elementi:
 OLEODINAMICA, OLEOIDRAULICA, IDRAULICA Tecnologia affine alla pneumatica caratterizzata dai seguenti elementi: CARATTERISTICHE CIRCUITALI Gruppo di generazione di energia idraulica Gruppo di distribuzione
OLEODINAMICA, OLEOIDRAULICA, IDRAULICA Tecnologia affine alla pneumatica caratterizzata dai seguenti elementi: CARATTERISTICHE CIRCUITALI Gruppo di generazione di energia idraulica Gruppo di distribuzione
Regolatore di pressione elettropneumatico. Attacco G ½. Catalogo 8684/IT G ½"
 Regolatore di pressione elettropneumatico Attacco G ½ Catalogo 8684/IT G ½" Catalogo 8684/IT La soluzione ECONOMICA che soddisfa le esigenze del mercato. Il design compatto e il peso ridotto garantiscono
Regolatore di pressione elettropneumatico Attacco G ½ Catalogo 8684/IT G ½" Catalogo 8684/IT La soluzione ECONOMICA che soddisfa le esigenze del mercato. Il design compatto e il peso ridotto garantiscono
1)MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto )
MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto )") MANIPOLATORI BOBINE MANIPOLATORI PER BOBINE IN CARTA E PLASTICA. 1)MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto4724-4725) -MODELLO: Liftronic -TIPO DI PRESA: Movimentazione di bobine di carta. -CICLO
MANIPOLATORI BOBINE MANIPOLATORI PER BOBINE IN CARTA E PLASTICA. 1)MANIPOLATORI PER BOBINE IN CARTA E PLASTICA (Foto4724-4725) -MODELLO: Liftronic -TIPO DI PRESA: Movimentazione di bobine di carta. -CICLO
Dinamica. Prof. Paolo Biondi Dipartimento GEMINI
 Dinamica Prof. Paolo Biondi Dipartimento GEMINI Dinamica: studio delle cause che determinano il moto dei corpi Forza = massa per accelerazione Unità di misura Newton (N): forza che applicata al chilogrammo
Dinamica Prof. Paolo Biondi Dipartimento GEMINI Dinamica: studio delle cause che determinano il moto dei corpi Forza = massa per accelerazione Unità di misura Newton (N): forza che applicata al chilogrammo
CENTRO DI TORNITURA E FRESATURA ML 1000
 CENTRO DI TORNITURA E FRESATURA ML 1000 Indice 1. Dati tecnici 2. Descrizione tecnica 1. DATI TECNICI Diametro tornibile mm 1100 Diametro volteggiabile mm 1300 Altezza d albero minima per carico/scarico
CENTRO DI TORNITURA E FRESATURA ML 1000 Indice 1. Dati tecnici 2. Descrizione tecnica 1. DATI TECNICI Diametro tornibile mm 1100 Diametro volteggiabile mm 1300 Altezza d albero minima per carico/scarico
[ significa: Tutto a portata di mano. EMCOMAT FB-450 L / FB-600 L con EASY CYCLE. Fresatrici universali con controllo a cicli sviluppato da EMCO
 [ E[M]CONOMY] significa: Tutto a portata di mano. EMCOMAT FB-450 L / FB-600 L con EASY CYCLE Fresatrici universali con controllo a cicli sviluppato da EMCO EMCOMAT FB-450 L / FB-600 L Sia per la produzione
[ E[M]CONOMY] significa: Tutto a portata di mano. EMCOMAT FB-450 L / FB-600 L con EASY CYCLE Fresatrici universali con controllo a cicli sviluppato da EMCO EMCOMAT FB-450 L / FB-600 L Sia per la produzione
Struttura e componenti
 HSP 643 WAVE Struttura e componenti Doppio sistema di guida del movimento verticale, 2 guide a rulli a forte precarico e 2 guide in materiale composito. Movimento verticale Z sostentato da due cilindri
HSP 643 WAVE Struttura e componenti Doppio sistema di guida del movimento verticale, 2 guide a rulli a forte precarico e 2 guide in materiale composito. Movimento verticale Z sostentato da due cilindri
CMM-3D BANCO PER IL CONTROLLO DIMENSIONALE
 Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per
Descrizione generale Il CMM 3D è un banco robotizzato per il controllo dimensionale di particolari plastici e meccanici. Il banco non è una macchina di misura assoluta, ma bensì un banco di controllo per