COSTRUZIONI AEROSPAZIALI. Stabilità dell equilibrio elastico I
|
|
|
- Francesco Bellini
- 5 anni fa
- Visualizzazioni
Transcript
1 COSTRUZIONI AEROSPAZIALI Stabilità dell equilibrio elastico I 1
2
3 Stabilità di un punto di equilibrio Il problema di stabilità è in genere ricondotto all esame della stabilità di un punto di equilibrio. Si tratta allora di determinare una posizione (o configurazione) di equilibrio del sistema ed in seguito perturbare il sistema da questa configurazione per studiarne il suo comportamento (ovvero la sua evoluzione temporale). Se il rapporto tra l entità dell effetto della perturbazione rispetto all entità della perturbazione stessa è piccolo allora nulla questio cioè il risultato finale sarà poco diverso da quello nominale (atteso). Se invece a causa infinitesima corrisponde effetto finito siamo siamo nel caso instabile. Il moto di assetto di un corpo D in orbita è descrito dal moto intorno al baricentro r* Terra 3
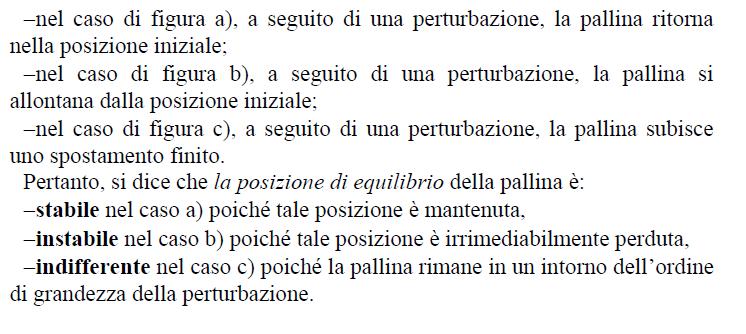
4 Stabilità del moto di assetto di un corpo sotto l azione della coppia gravitazionale Due posizioni di equilibrio Perturbazione intorno alla posizione Moto armonico Equilibrio stabile 4
5 Stabilità di assetto Perturbazione intorno alla posizione Moto instabile 5
6 Stabilità dei sistemi elastici A)Problemi di stabilità dinamica, le forze applicate variano con il tempo: studio delle zone di stabilità, vibrazioni parametriche, P(t) N(t) B)Problemi di stabilità statica, le forze sono applicate staticamente. Trovate le posizioni di equilibrio: B1)Comportamento critico P<P cr studio linearizzato del moto nell intorno delle posizioni di equilibrio per trovare P cr. B)Comportamento postcritico P>P cr : studio non-lineare del moto. P < P cr a) b) P P cr 6
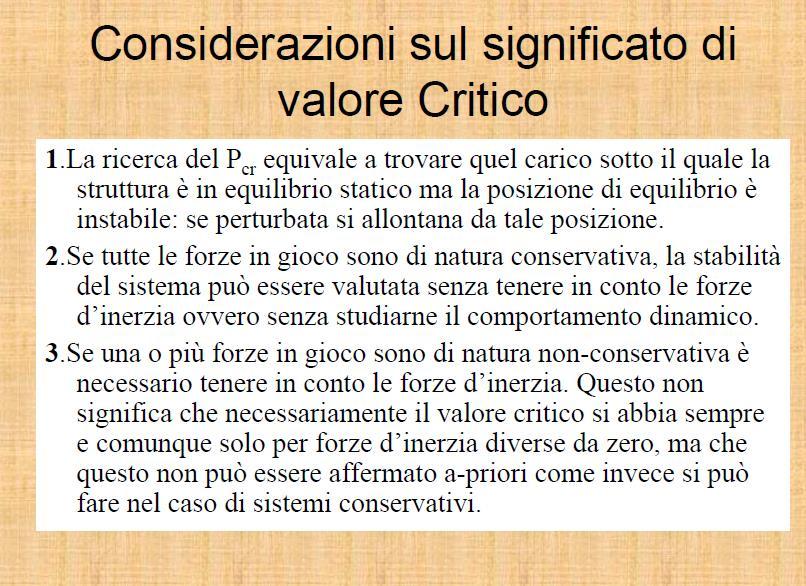
7 Alcune considerazioni L analisi basata sullo studio del moto comportano la presenza di forze d inerzia. Pur tuttavia nei sistemi conservativi il P cr NON dipende dalle forze d inerzia e lo studio può essere condotto senza considerare le f. d inerzia. nei sistemi NON-conservativi il P cr dipende in generale dalle forze d inerzia e lo studio deve essere condotto considerando le f. d inerzia. Indicheremo come: criterio dinamico: il P cr viene trovato tenendo in conto le forze d inerzia. criterio statico: il P cr viene trovato senza considerare le forze d inerzia. Nella ricerca del P cr il problema è lineare. A seconda del metodo si ha: un sistema omogeneo: problema di autovalori; un sistema non-omogeneo: problema di risposta. Nell analisi post-critica il problema è non-lineare. Un problema non lineare anche se omogeneo oltre alla soluzione banale possiede in generale anche soluzioni non identicamente nulle. E quindi possibile calcolare la deformata, valutarne la stabilità ma soprattutto lo stato di sollecitazione e deformazione della struttura per capire se ancora in grado o meno di reggere un P>P cr. 7
8 Ricerca del Carico Critico Analisi in campo lineare. A seconda del metodo si ha: un sistema omogeneo: problema di autovalori; un sistema non-omogeneo: problema di risposta. 8
9 Sistema ad 1G.L.: trazione P e Posizione di equilibrio: il momento rispetto la cerniera della forza P è nullo: e =0 C Perturbiamo il sistema in equilibrio dando una piccola variazione *: = e + * P J * C * PLsen * 0 J * (C PL) * 0 * * * 0 Acos t Bsen t C Moto armonico di pulsazione ω 9
10 Sistema ad 1G.L.: compressione P e Posizione di equilibrio: e =0 Perturbiamo il sistema in equilibrio: = e + * * * * * * J C PLsen 0 J (C PL) 0 P C 1) C>PL: ponendo CPL= * * * 0 Acos t Bsen t ) C<PL: ponendo CPL= C * * * J 0 Acosh( t) Bsenh( t) 3) C=PL: * c1 ct ) e 3) sono moti amplificati nel tempo 10
11 Sistema ad 1G.L.: P laterale P e Posizione di equilibrio C PLcos PL e PL/ C C Perturbiamo il sistema in equilibrio: = e + * P J C( ) PLcos( ) * * * e e Facendo uno sviluppo in serie C * * Jα +(C+PLsenα e)α =0 b) * * * 0 Acos t Bsen t 11
12 Riepilogo: analisi lineare 1.Si trovano le posizioni di equilibrio e..si perturba il sistema intorno alle posizioni di equilibrio: = e +* ; 3.Il carico P è inteso come un parametro in funzione del quale varia il moto del sistema. Quindi possiamo definire carico critico il più piccolo valore finito del carico applicato sotto il quale il moto diviene amplificato. 4.A differenza di quanto avveniva nei problemi di risposta statica, in cui il carico laterale P compariva come termine noto per cui l equazione di equilibrio risultava non omogenea, le equazioni perturbate risultano omogenee e questo per due ragioni: a)sono espresse in termini della perturbazione *; b)il carico cui è soggetta l asta non è P ma il momento PL. Il problema è quindi ricondotto allo studio delle piccole oscillazioni libere di un problema formalmente equivalente al sistema massamolla, salvo che ora il sistema presenta una rigidezza equivalente (CPL) che è funzione del carico. Rigidezza questa che all aumentare del carico: aumenta nei casi di P positivo (carico di trazione) ; diminuisce fino ad annullarsi nel caso P negativo (carico di compressione). Se la rigidezza equivalente è positiva, il sistema si mantiene nell intorno della configurazione di equilibrio; quando la rigidezza equivalente è negativa, il sistema si allontana dalla configurazione di equilibrio. 1
13 segue: riepilogo analisi lineare Dei tipi di carico esaminati quello che induce instabilità è solo il carico di compressione. In questo ultimo caso: 5a) si ha instabilità quando il carico P supera un certo determinato valore che dipende dalle caratteristiche elastiche e geometriche del sistema (nel caso specifico dalla rigidezza C e lunghezza L), oltre naturalmente che dal tipo di vincolo implicito nell equazione di equilibrio; 5b) partendo da P=0, all aumentare di P, la frequenza di oscillazione decresce ed è uguale a zero quando il carico raggiunge il valore critico. Poiché le forze di inerzia sono proporzionali alla frequenza, quando =0, esse risultano nulle. In altri termini il P cr non è influenzato dalla presenza delle forze d inerzia, quindi per determinare il carico critico si possono non tenere in conto le forze d inerzia ed usare il criterio statico; 5c) superato il carico critico la deformata diventa sempre più grande per cui non risulta più valida l ipotesi di piccoli spostamenti e non possiamo più linearizzare l equazione di equilibrio. 13
14 Metodo statico Se il P cr non dipende dalle forze di inerzia, la sua ricerca può essere condotta studiando il problema dal punto di vista statico. Nell ambito del metodo statico per sistemi a comportamento lineare, lo studio della stabilità può essere condotto con uno dei seguenti metodi: A)Metodo energetico: per sistemi conservativi vale il principio per cui una posizione di equilibrio è stabile (instabile) se, in questa posizione, la derivata seconda dell energia è positiva (negativa). Il Pcr è il più piccolo valore di P per cui la derivata seconda dell energia diventa negativa. B)Metodo della biforcazione: si calcolano le posizioni di equilibrio del sistema omogeneo. Se per uno stesso valore del carico si hanno più soluzioni, significa che per tale carico il sistema può indifferentemente porsi su ciascuna di esse. Il valore del carico a partire dal quale le soluzioni sono multiple, individua un punto critico ed è detto punto di biforcazione (tri-forcazione). C)Metodo delle imperfezioni: il sistema considerato è non omogeneo e si ha un problema di risposta dove per carico critico si intende quel valore finito del carico per il quale la deformata tende a diventare infinita. 14
15 Metodo Energetico A)Metodo energetico: per sistemi conservativi vale il principio per cui una posizione di equilibrio è stabile (instabile) se, in questa posizione, la derivata seconda dell energia è positiva (negativa). Il Pcr è il più piccolo valore di P per cui la derivata seconda dell energia diventa negativa. 15
16 C P Sistema ad 1G.L.: trazione E 1 C PL(1 cos ) 1 C 1 PL E 1 PL de E 1 p dove p (1 p) 0 0 C C d e p=0,75 1, 1,0 0,8 E d E d 0 1 p 0 p=0,5 p=1,00 p=1,5 0,6 0,4 0, Stabile p 0,0-1,0-0,8-0,6-0,4-0, 0, 0,4 0,6 0,8 Rad 1,0-57,30-45,84-34,38 -,9-11,46 0, -0, 0,0 11,46,9 34,38 45,84 57,30 16
17 P C c) Sistema ad 1G.L.: compressione E C PL(1 cos ) C PL E 1 PL E 1 p dove p C C de (1 p) 0 0 e d 0,3 0, E 0 se p 1 d d E 1p 0 se p 1 0 p=0,50 0,1 p=0,75 0,0-1,0-0,8-0,6-0,4-0, 0,0 0, 0,4 0,6 0,8 1,0 Instabile p -0,1-0, -0,3 p=1,5 p=1,50 Stabile p=1 17
18 C E Sistema ad 1G.L.: P laterale 1 C PLsen E 1 p b) de d p 0 e p d E d e 1 0 p=1,00 1,0 0,8 E p Stabile 0,5 p=0,5 0,3 p==0,5 p=0,5-1,0-0,8-0,6-0,4-0, 0,0 rad) 0,4 0,6 0,8 1,0-0,3 p=0,75-0,5 p=1,00 18
19 Metodo della biforcazione B)Metodo della biforcazione: si calcolano le posizioni di equilibrio del sistema omogeneo. Se per uno stesso valore del carico si hanno più soluzioni, significa che per tale carico il sistema può indifferentemente porsi su ciascuna di esse. Il valore del carico a partire dal quale le soluzioni sono multiple, individua un punto critico ed è detto punto di biforcazione. 19
20 P Dall equilibrio Trazione (C PL) 0 (1 p) 0 0 C Stabile p NON c è biforcazione: sempre stabile 0
21 Compressione P Dall equilibrio (C PL) 0 (1 p) 0 e 0 C c) Instabile p Stabile 1 C è biforcazione per p=1: per p>1 almeno un ramo instabile 1
22 Metodo delle imperfezioni C)Metodo delle imperfezioni: il sistema considerato è non omogeneo e si ha un problema di risposta dove per carico critico si intende quel valore finito del carico per il quale la deformata tende a diventare infinita.
23 P P P a) Trazione : C( ) PL 0 1 p 1 p a) b) c) b) Laterale : C( ) c) Compressione : PL p C( ) PL 0 1 p 1 p 1, 1 0,8 0,6 0,4 0, P P cr Caso a) Caso c) =0,0 Caso b) 0 Caso b) 0, ,1 0, 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 Il fatto che per p<1 non si ha instabilità potrebbe indurre a pensare che il sistema soggetto a carichi p<1 è in grado di svolgere la propria funzione strutturale. In realtà per =0,001, per P=0,9P cr, si ha =0,01 pari a 10 volte la deformata iniziale; per P=0,99P cr, si ha =0,1 pari a 100 volte la deformata iniziale. E sufficiente un carico P=0,999P cr, per avere =1 pari a 1000 volte la iniziale. 3
24 K/ Sistema ad 1G.L.: compressione P K/ Per il nuovo sistema di figura con molla assiale K si possono ripetere tutte le analisi e considerazioni fatte per il sistema con molla C. In particolare: Posizione di equilibrio: e =0 Perturbiamo : = e + * * * * * J (KL PL)sen 0 J (KL P)L 0 1) KL>P: ponendo KLP= (KL P) / J ) KL<P: ponendo KLP= (KL P) / J * * * 0 Acos t Bsen t * * * 0 Acosh( t) Bsenh( t) 3) KL=P * * 1 0 c c t Pcr KL 4
25 Comportamento post-critico Problema non-lineare. Un problema non lineare anche se omogeneo oltre alla soluzione banale possiede in generale anche soluzioni non identicamente nulle. E quindi possibile calcolare la deformata, valutarne la stabilità ma soprattutto lo stato di sollecitazione e deformazione della struttura per capire se ancora in grado o meno di reggere un P>P cr. 5
26 P Metodo Energetico 1 C PL(1 cos ) E 1 E p(1 cos ) dove p PL C C 6
27 P Metodo Energetico C de psen 0 d e 0 ; p qualsiasi e p 1 sen e d E d e e =0 1 pcos e d E d e 1 p 0 per p 1 "S" 0 per p 1 "INS" d E d e 1 sen e e cos e 0 "S" sen e p e sen e 1 7
28 P Metodo della Biforcazione C C PLsen 0 psen 0 e 0 ; p qualsiasi e p 1 sen e All aumentare di p si ha: per p<1: la sola soluzione =0; per p=1: intersezione delle curve delle due soluzioni di equilibrio cioè più soluzioni di equilibrio ovvero biforcazione (triforcazione). Da questo punto almeno un ramo è instabile per p>1: tre soluzioni: =0 instabile; = e stabili. 8
29 Metodo delle imperfezioni. psen 0 p sen 9
30 Molla torsionale a comportamento NON Lineare C=C 0 +C 1 30
31 C P E E 0 Metodo Energetico 3 C0 C1 (C0 C1 d PL(1 cos ) PL(1 cos ) 4 1 C 4 p(1 cos ) de C d 1,30 3 psen 0 p e e sen 0 e 1 C e C=0, C=0,1 C=0,05 C=0 1,5 1,0 1,15 p/p cr Instabile Stabile 1,10 1,05 Stabile 1,00 0,95 0,90-1,0-0,8-0,6-0,4-0, 0,0 0, 0,4 0,6 0,8 1,0 31
32 C P de d C 3 Metodo Energetico psen 0 p e e sen 0 e 1 C e d E d e 1 3C d E d d E d 0 0 1p e pcos 0 per p 1 stabile 0 per p 1 instabile 1 3C sen (1 C ) cos 0 sen e 1,30 C=0, C=0,1 C=0,05 C=0 1,5 1,0 1,15 p/p cr Instabile Stabile 1,10 1,05 Stabile 1,00 0,95 prof. Renato Barboni 3 0,90-1,0-0,8-0,6-0,4-0, 0,0 0, 0,4 0,6 0,8 1,0
33 Sistema ad 1G.Lcon molla K K/ P K/ KL E sen p(1 cos ) E sen PL(1 cos ) 1 33
34 K/ P K/ M. dell energia 1 de d E sen p(1 cos ) (cos p)sen 0 e 0 ; p cos e d E d 1 p 0 0 per p 1 per 1 0 e p d E d pcos e cos e cos e sen e 0 34
35 P M. delle imperfezioni K/ K/ E 1 sen sen p(1 cos ) de d 0 p sen e sen tan e e 35
36 K/ P K/ M. delle imperfezioni d E 1 3 sen sen d sen dp 1 d sen 3 sen sen E cambia segno e quindi il sistema da stabile diviene instabile quando passa per 0, ovvero quando la curva p, si annulla (tangente orizzontale). tangente orizzontale transizione da stabile ad instabile P cr sempre più piccolo 36
37 K/ P K/ M. delle imperfezioni 1,0 p cr 0,8 0,6 0,4 0,00 0,04 0,08 0,1 0,16 0,0 Variazione del P cr all aumentare dell imperfezione 37
38 Rappresentazione matriciale del sistema ad N Gradi di Libertà Indichiamo con {Q} i parametri che individuano in modo univoco la posizione di un sistema dette anche coordinate generalizzate o coordinate lagrangiane.il loro numero definisce i grado di libertà (G.L.). In generale si ha il sistema: KQ MQ pbq F Nel sistema asta-molla ad 1G.L. fin qui visto, {Q} ha una sola componente. Al posto di avremmo potuto utilizzare un altro parametro quale ad esempio lo spostamento dell estremità dell asta. 38
39 Stabilità : sistemi conservativi KQ MQ pbq F 1 T U Q K Q 1 VP p Q B Q T F V F Q T E Q K Q p B Q F 0 K p B Q F Problema di autovalori K p B Q 0 K p B 0 Problema di risposta 1 K p B Q F Q K pb F 39

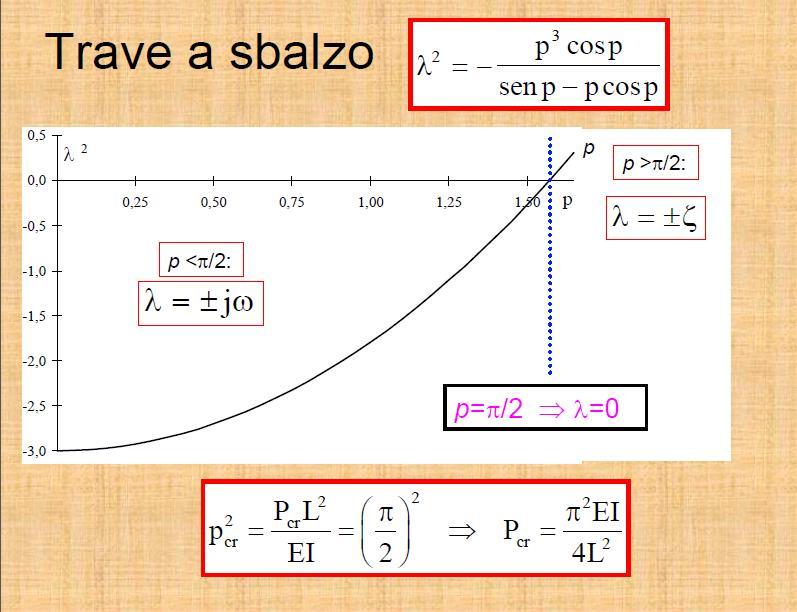
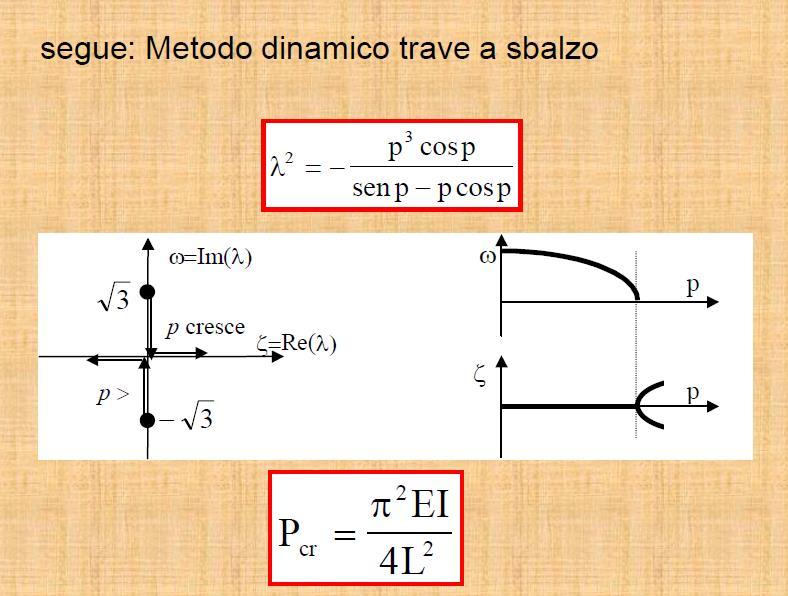
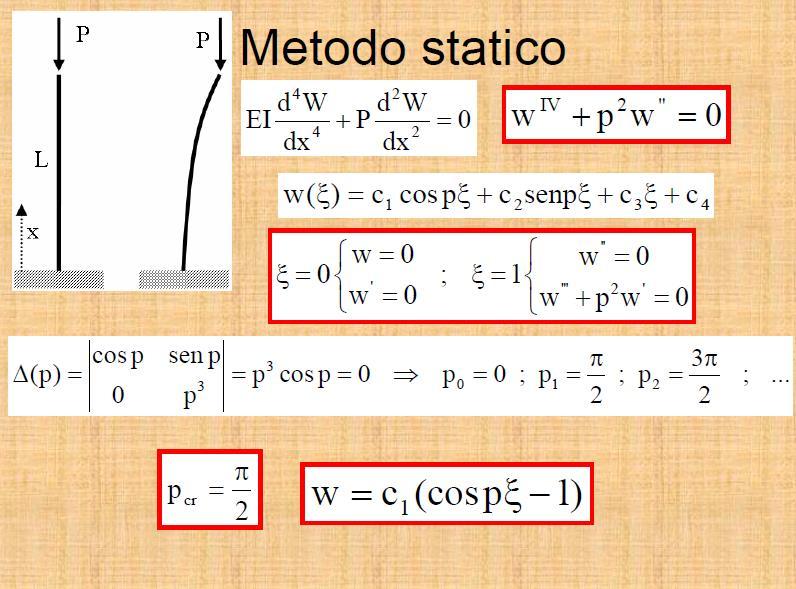
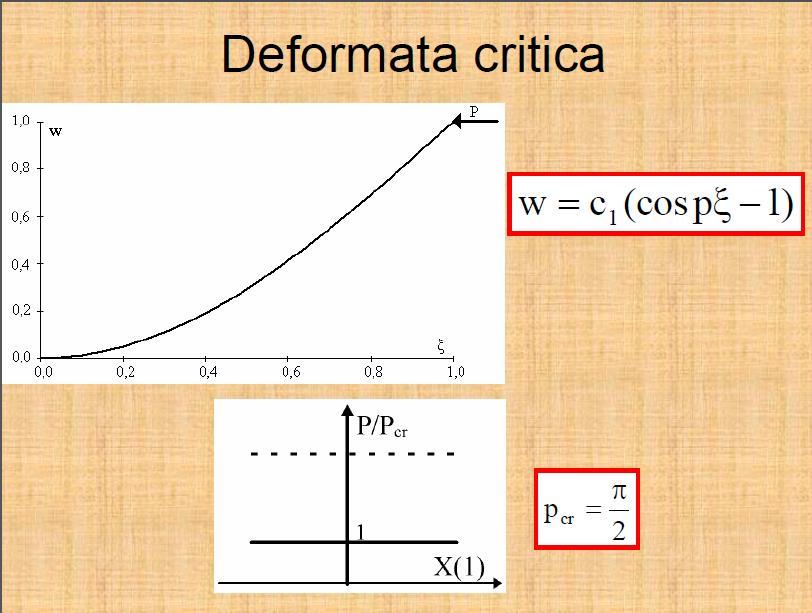
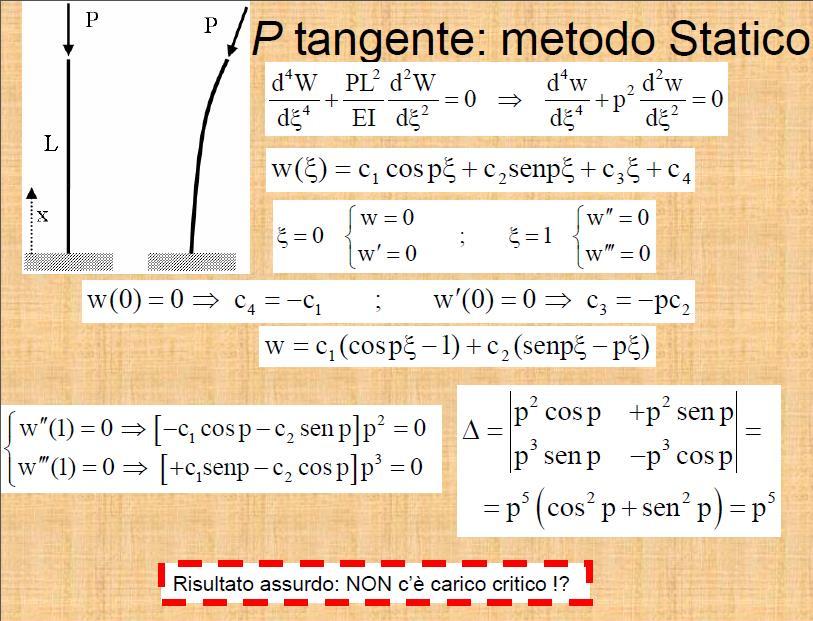
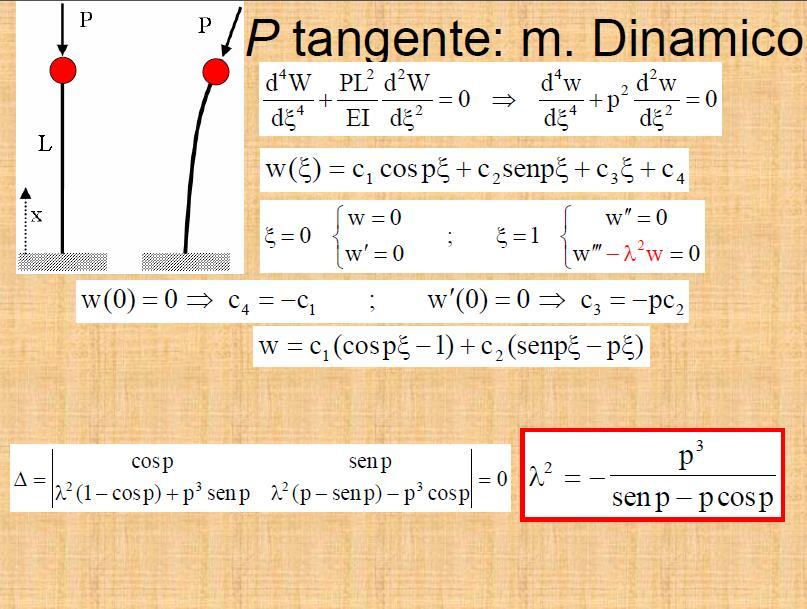
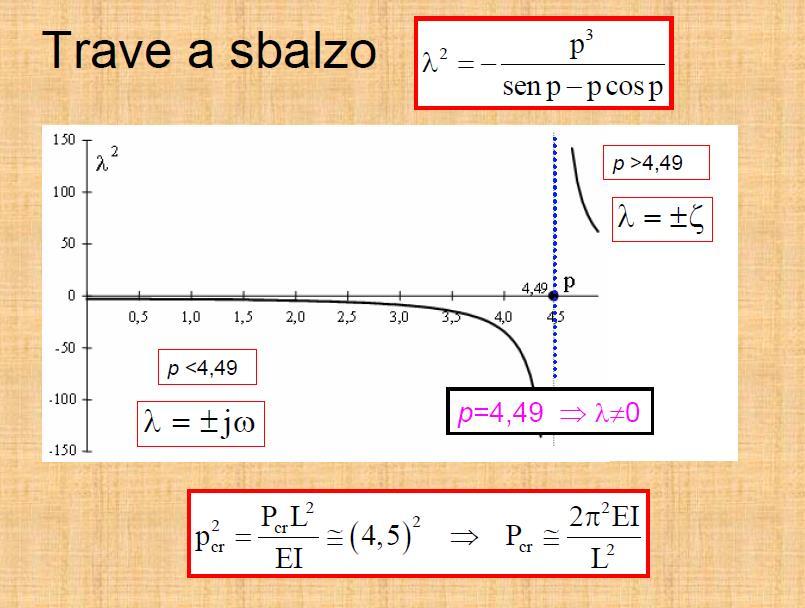
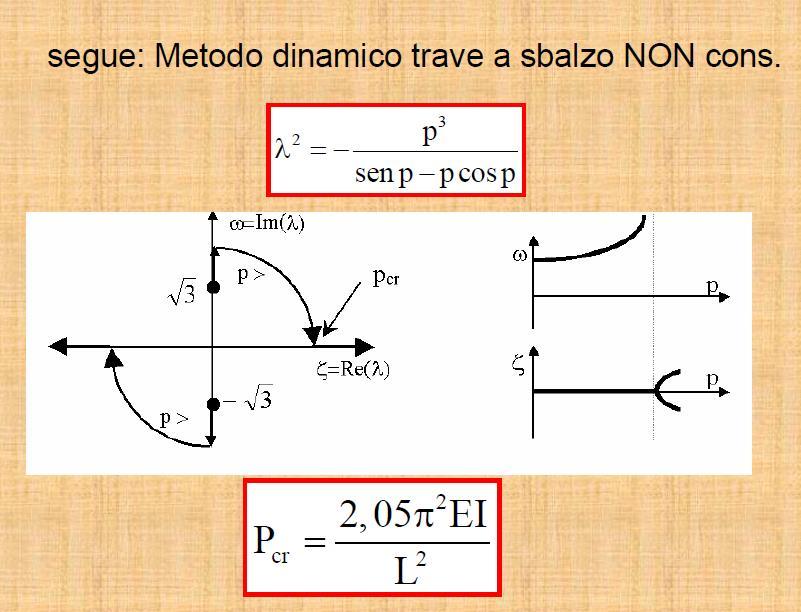
40 Stabilità delle travi Equazione di equilibrio nella configurazione deformata Statica Dinamica 40
41 41
42 4
43 43
44 44
45 45
46 46
47 47

48 Tre percorsi alternativi 48
49 49
50 50
51 51
52 5
53 53
54 54

55 4.Sistemi conservativi 55

56 5. Sistemi non conservativi 56
57 57
58 58
59 59

60 Stabilità delle piastre 60
61 61
62 Comportamento a trave 6
63 Paolo Gasbarri 63
CAPITOLO X STABILITA DEI SISTEMI ELASTICI
 AITOO X STABIITA DEI SISTEMI EASTII R. BARBONI OSTRUZIONI AEROSAZIAI 3 1. Introduzione a parola stabilità è usata quasi quotidianamente ed in settori non necessariamente della fisica. osì si parla di
AITOO X STABIITA DEI SISTEMI EASTII R. BARBONI OSTRUZIONI AEROSAZIAI 3 1. Introduzione a parola stabilità è usata quasi quotidianamente ed in settori non necessariamente della fisica. osì si parla di
Dinamica dei Sistemi Aerospaziali Esercitazione 17
 Dinamica dei Sistemi Aerospaziali Esercitazione 7 9 dicembre 0 M, ft G k, r k, r b z l l y Figura : Sistema a gradi di libertà. Il sistema meccanico rappresentato in Figura è composto da una trave di massa
Dinamica dei Sistemi Aerospaziali Esercitazione 7 9 dicembre 0 M, ft G k, r k, r b z l l y Figura : Sistema a gradi di libertà. Il sistema meccanico rappresentato in Figura è composto da una trave di massa
Capitolo 12. Moto oscillatorio
 Moto oscillatorio INTRODUZIONE Quando la forza che agisce su un corpo è proporzionale al suo spostamento dalla posizione di equilibrio ne risulta un particolare tipo di moto. Se la forza agisce sempre
Moto oscillatorio INTRODUZIONE Quando la forza che agisce su un corpo è proporzionale al suo spostamento dalla posizione di equilibrio ne risulta un particolare tipo di moto. Se la forza agisce sempre
Nome: Cognome: Data: 01/04/2017
 Esercizio N. 1 Valutazione 5 Un ala, lunga L = 25m, è modellata come una trave in alluminio (E = 72GPa, Iy=2e-4m 4 ) incastrata alla fusoliera in x=0m, come in figura. La sollecitazione che si vuole studiare
Esercizio N. 1 Valutazione 5 Un ala, lunga L = 25m, è modellata come una trave in alluminio (E = 72GPa, Iy=2e-4m 4 ) incastrata alla fusoliera in x=0m, come in figura. La sollecitazione che si vuole studiare
sin =0 (1.1) Risolvendo l equazione (1.1) rispetto alla forza adimesionalizzata =, si ottiene: =
 Risolvendo l equazione (1.1) rispetto alla forza adimesionalizzata =, si ottiene: =") Capitolo 1 INTRODUZIONE ALLA STABILITA DELL EQUILIBRIO 1.1 Sistemi articolati rigidi Si consideri una mensola rigida vincolata tramite un supporto elastico di rigidezza, soggetta a carico assiale, come
Capitolo 1 INTRODUZIONE ALLA STABILITA DELL EQUILIBRIO 1.1 Sistemi articolati rigidi Si consideri una mensola rigida vincolata tramite un supporto elastico di rigidezza, soggetta a carico assiale, come
Il collasso per instabilità
 Il collasso per instabilità 1 o studio delle travi si è sviluppato facendo l ipotesi l di piccoli spostamenti: cosϑ 1 (1) linearizzazione delle relazioni cinematiche (ad es. per piccoli ) ϑ () equilibrio
Il collasso per instabilità 1 o studio delle travi si è sviluppato facendo l ipotesi l di piccoli spostamenti: cosϑ 1 (1) linearizzazione delle relazioni cinematiche (ad es. per piccoli ) ϑ () equilibrio
Risposta in vibrazioni libere di un sistema lineare viscoso a più gradi di libertà. Prof. Adolfo Santini - Dinamica delle Strutture 1
 Risposta in vibrazioni libere di un sistema lineare viscoso a più gradi di libertà Prof. Adolfo Santini - Dinamica delle Strutture 1 Vibrazioni libere non smorzate 1/6 Le equazioni del moto di un sistema
Risposta in vibrazioni libere di un sistema lineare viscoso a più gradi di libertà Prof. Adolfo Santini - Dinamica delle Strutture 1 Vibrazioni libere non smorzate 1/6 Le equazioni del moto di un sistema
Nome: Cognome: Data: 18/06/2015
 Esercizio N. Valutazione 4 Sia dato un velivolo in configurazione di equilibrio come riportato in figura. I carichi agenti sull ala, modellata come una trave di lunghezza L = 0m e larghezza c=m, sono il
Esercizio N. Valutazione 4 Sia dato un velivolo in configurazione di equilibrio come riportato in figura. I carichi agenti sull ala, modellata come una trave di lunghezza L = 0m e larghezza c=m, sono il
Formulazione dell equazione del moto. Prof. Adolfo Santini - Dinamica delle Strutture 1
 Formulazione dell equazione del moto Prof. Adolfo Santini - Dinamica delle Strutture 1 Sistema a un grado di libertà In alcuni sistemi strutturali la massa, lo smorzamento e la rigidezza sono concentrati
Formulazione dell equazione del moto Prof. Adolfo Santini - Dinamica delle Strutture 1 Sistema a un grado di libertà In alcuni sistemi strutturali la massa, lo smorzamento e la rigidezza sono concentrati
Costruzioni in zona sismica
 Costruzioni in zona sismica Lezione 8 Sistemi a più gradi di liberà: Oscillazioni libere in assenza di smorzamento N equazioni differenziali omogenee accoppiate tramite la matrice delle masse, la matrice
Costruzioni in zona sismica Lezione 8 Sistemi a più gradi di liberà: Oscillazioni libere in assenza di smorzamento N equazioni differenziali omogenee accoppiate tramite la matrice delle masse, la matrice
LEZIONE N 14 ELEMENTI STRUTTURALI COMPRESSI
 LEZIONE N 14 ELEMENTI STRUTTURALI COMPRESSI Gli elementi strutturali compressi sono presenti in numerosi componenti strutturali, quali le colonne degli edifici, le travi reticolari, le strutture di controvento,
LEZIONE N 14 ELEMENTI STRUTTURALI COMPRESSI Gli elementi strutturali compressi sono presenti in numerosi componenti strutturali, quali le colonne degli edifici, le travi reticolari, le strutture di controvento,
Figura 2.5. Arco a tre cerniere allineate sotto carico.
 10 Effetti geometrici in strutture elastiche 37 quelle di compatibilità cinematica ammettono sempre soluzione unica, per cui si possono sempre determinare gli sforzi normali dovuti ad un carico esterno
10 Effetti geometrici in strutture elastiche 37 quelle di compatibilità cinematica ammettono sempre soluzione unica, per cui si possono sempre determinare gli sforzi normali dovuti ad un carico esterno
CORSO DI COMPLEMENTI DI MECCANICA. Prof. Vincenzo Niola
 CORSO DI COMPLEMENTI DI MECCANICA Prof. Vincenzo Niola SISTEMI A DUE GRADI DI LIBERTÀ Lo studio dei sistemi a più gradi di libertà verrà affrontato facendo riferimento, per semplicità, solo a sistemi conservativi,
CORSO DI COMPLEMENTI DI MECCANICA Prof. Vincenzo Niola SISTEMI A DUE GRADI DI LIBERTÀ Lo studio dei sistemi a più gradi di libertà verrà affrontato facendo riferimento, per semplicità, solo a sistemi conservativi,
Costruzione di Macchine
 Costruzione di Macchine A.A. 017/018 Prof. Luca Esposito Lecture 3: Concentrazioni delle tensioni Verifiche di resistenza e dimensionamento per carichi statici Travi curve soggette a flessione Instabilità
Costruzione di Macchine A.A. 017/018 Prof. Luca Esposito Lecture 3: Concentrazioni delle tensioni Verifiche di resistenza e dimensionamento per carichi statici Travi curve soggette a flessione Instabilità
Cenni ad aspetti non classici per problemi di instabilità dell equilibrio. equilibrio
 Laurea Magistrale Ingegneria Meccanica A.A. 011 / 01 Cenni ad aspetti non classici per problemi di instabilità dell equilibrio equilibrio G. Vairo - Complementi di Scienza delle Costruzioni (Ing. Meccanica)
Laurea Magistrale Ingegneria Meccanica A.A. 011 / 01 Cenni ad aspetti non classici per problemi di instabilità dell equilibrio equilibrio G. Vairo - Complementi di Scienza delle Costruzioni (Ing. Meccanica)
1. Siano A e B due punti di un atto di moto rigido piano. Dire quale delle seguenti affermazioni è errata:
 Università del Salento Facoltà di Ingegneria Corsi di Laurea in Ingegneria Industriale e Civile Prova scritta di Meccanica Razionale 20 giugno 2016 Soluzioni Parte 1: Domande a risposta multipla. 1. Siano
Università del Salento Facoltà di Ingegneria Corsi di Laurea in Ingegneria Industriale e Civile Prova scritta di Meccanica Razionale 20 giugno 2016 Soluzioni Parte 1: Domande a risposta multipla. 1. Siano
Esame di Fisica con Laboratorio Corso di Laurea in Scienze dell Architettura Università degli Studi di Udine 29 gennaio 2010 Mario Paolo Giordani
 Esame di Fisica con Laboratorio Corso di Laurea in Scienze dell Architettura Università degli Studi di Udine 29 gennaio 2010 Mario Paolo Giordani Soluzioni Teoria Enunciare sinteticamente chiarendo il
Esame di Fisica con Laboratorio Corso di Laurea in Scienze dell Architettura Università degli Studi di Udine 29 gennaio 2010 Mario Paolo Giordani Soluzioni Teoria Enunciare sinteticamente chiarendo il
EFFETTI DELLA DEFORMABILITÀ DINAMICA (MECCANICA DELLE VIBRAZIONI) In realtà essi sono approssimati, pertanto i nostri schemi sono approssimati.
 In realtà essi sono approssimati, pertanto i nostri schemi sono approssimati.") EFFETTI DELLA DEFORMABILITÀ DINAMICA (MECCANICA DELLE VIBRAZIONI Per le macchine viste finora, è quasi sempre possibile effettuare uno studio considerandole a un solo grado di libertà, dove ogni elemento
EFFETTI DELLA DEFORMABILITÀ DINAMICA (MECCANICA DELLE VIBRAZIONI Per le macchine viste finora, è quasi sempre possibile effettuare uno studio considerandole a un solo grado di libertà, dove ogni elemento
Dinamica delle Strutture
 Corso di Laurea magistrale in Ingegneria Civile e per l Ambiente e il Territorio Dinamica delle Strutture Prof. Adolfo SANTINI Ing. Francesco NUCERA Prof. Adolfo Santini - Dinamica delle Strutture 1 Dinamica
Corso di Laurea magistrale in Ingegneria Civile e per l Ambiente e il Territorio Dinamica delle Strutture Prof. Adolfo SANTINI Ing. Francesco NUCERA Prof. Adolfo Santini - Dinamica delle Strutture 1 Dinamica
L scritto nel testo). Forza di reazione vincolare: deve bilanciare le forze esterne applicate, dunque è verso il basso (quindi positiva ql
. Forza di reazione vincolare: deve bilanciare le forze esterne applicate, dunque è verso il basso (quindi positiva ql") Costruzioni Aerospaziali - Esame Aprile 5. Una semiala, lunga = 5m, è modellata come una trave in alluminio (E = 7GPa, Iy=3e-3m 4 ) incastrata alla fusoliera in x=m, come in figura. a sollecitazione che
Costruzioni Aerospaziali - Esame Aprile 5. Una semiala, lunga = 5m, è modellata come una trave in alluminio (E = 7GPa, Iy=3e-3m 4 ) incastrata alla fusoliera in x=m, come in figura. a sollecitazione che
Vibrazioni Meccaniche
 Vibrazioni Meccaniche A.A. 2-22 Esempi di scrittura dell equazione di moto per sistemi a 2 gdl Turbina Una turbina pone in rotazione un generatore elettrico per mezzo della trasmissione schematizzata in
Vibrazioni Meccaniche A.A. 2-22 Esempi di scrittura dell equazione di moto per sistemi a 2 gdl Turbina Una turbina pone in rotazione un generatore elettrico per mezzo della trasmissione schematizzata in
Meccanica Dinamica del punto materiale
 Meccanica 18-19 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente (statico,
Meccanica 18-19 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente (statico,
DINAMICA DI SISTEMI AEROSPAZIALI
 DINAMICA DI SISTEMI AEROSPAZIALI Tema d esame 11-02 - 23 Esercizio 1. Il sistema in figura, posto in un piano verticale, è costituito da due dischi di raggio R e di massa uniformemente distribuita rispettivamente
DINAMICA DI SISTEMI AEROSPAZIALI Tema d esame 11-02 - 23 Esercizio 1. Il sistema in figura, posto in un piano verticale, è costituito da due dischi di raggio R e di massa uniformemente distribuita rispettivamente
Uno di questi casi è rappresentato dal cedimento in elementi di strutture soggetti a carichi di compressione che danno luogo ad instabilità elastica
 In alcuni casi una struttura soggetta a carichi statici può collassare con un meccanismo diverso da quello del superamento dei limiti di resistenza del materiale. Uno di questi casi è rappresentato dal
In alcuni casi una struttura soggetta a carichi statici può collassare con un meccanismo diverso da quello del superamento dei limiti di resistenza del materiale. Uno di questi casi è rappresentato dal
Influenza degli spostamenti sull equilibrio
 Influenza degli spostamenti sull equilibrio Le strutture ingegneristiche sono spesso sufficientemente rigide e vincolate da assicurare che gli spostamenti siano piccoli ed ininfluenti sull equilibrio Le
Influenza degli spostamenti sull equilibrio Le strutture ingegneristiche sono spesso sufficientemente rigide e vincolate da assicurare che gli spostamenti siano piccoli ed ininfluenti sull equilibrio Le
PROVA SCRITTA DI MECCANICA RAZIONALE (21 gennaio 2011)
") PRV SRITT DI MENI RZINLE (21 gennaio 2011) Il sistema in figura, posto in un piano verticale, è costituito di un asta rigida omogenea (massa m, lunghezza 2l) i cui estremi sono vincolati a scorrere, senza
PRV SRITT DI MENI RZINLE (21 gennaio 2011) Il sistema in figura, posto in un piano verticale, è costituito di un asta rigida omogenea (massa m, lunghezza 2l) i cui estremi sono vincolati a scorrere, senza
Analisi. Analisi. Analisi lineari 1.1. Analisi statica lineare
 2 AxisVM permette di eseguire analisi statiche lineari e non lineari, analisi dinamiche lineari e non lineari, analisi modali e di instabilità, attraverso il Metodo agli Elementi Finiti. Ogni analisi è
2 AxisVM permette di eseguire analisi statiche lineari e non lineari, analisi dinamiche lineari e non lineari, analisi modali e di instabilità, attraverso il Metodo agli Elementi Finiti. Ogni analisi è
R è definita infine dall insieme delle curve percorse da ogni singolo punto della corda.
 1. Problema della corda vibrante Si consideri una corda monodimensionale, di sezione nulla avente densità per unità di lunghezza ρ e modulo elastico lineare E. Una corda reale approssima quella ideale
1. Problema della corda vibrante Si consideri una corda monodimensionale, di sezione nulla avente densità per unità di lunghezza ρ e modulo elastico lineare E. Una corda reale approssima quella ideale
1 Sistemi Dinamici Esercizio del Parziale del 29/11/2010
 1 Sistemi Dinamici Esercizio del Parziale del 29/11/2010 Si consideri il sistema dinamico con { ẋ = y ẏ = d U(x) U(x) = 2 ( x 2 3 x + 4 ) e x/2. (2) 1. Tracciare qualitativamente le curve di fase del sistema
1 Sistemi Dinamici Esercizio del Parziale del 29/11/2010 Si consideri il sistema dinamico con { ẋ = y ẏ = d U(x) U(x) = 2 ( x 2 3 x + 4 ) e x/2. (2) 1. Tracciare qualitativamente le curve di fase del sistema
Nm
 Nome: Cognome: Data: 1//15 Esercizio N. 1 Valutazione 7 Sia dato un velivolo schematizzato come in figura, con l ipotesi di trascurare le dimensioni della fusoliera. Su ciascuna semiala, modellata come
Nome: Cognome: Data: 1//15 Esercizio N. 1 Valutazione 7 Sia dato un velivolo schematizzato come in figura, con l ipotesi di trascurare le dimensioni della fusoliera. Su ciascuna semiala, modellata come
Università degli studi di Cagliari. Corso di aggiornamento. Unità 4 PIASTRE IN C.A. E INSTABILITÀ
 Università degli studi di Cagliari Dipartimento di Ingegneria Strutturale Corso di aggiornamento Unità 4 PIASTRE IN C.A. E INSTABILITÀ RELATORE: Ing. Igino MURA imura@unica.it 25-26 Giugno 2010 - Instabilità:
Università degli studi di Cagliari Dipartimento di Ingegneria Strutturale Corso di aggiornamento Unità 4 PIASTRE IN C.A. E INSTABILITÀ RELATORE: Ing. Igino MURA imura@unica.it 25-26 Giugno 2010 - Instabilità:
Ricordiamo ora che a è legata ad x (derivata seconda) ed otteniamo
 ed otteniamo") Moto armonico semplice Consideriamo il sistema presentato in figura in cui un corpo di massa m si muove lungo l asse delle x sotto l azione della molla ideale di costante elastica k ed in assenza di forze
Moto armonico semplice Consideriamo il sistema presentato in figura in cui un corpo di massa m si muove lungo l asse delle x sotto l azione della molla ideale di costante elastica k ed in assenza di forze
Costruzioni in zona sismica
 Costruzioni in zona sismica Lezione 7 Sistemi a più gradi di libertà Il problema dinamico viene formulato con riferimento a strutture con un numero finito di gradi di libertà. Consideriamo le masse concentrate
Costruzioni in zona sismica Lezione 7 Sistemi a più gradi di libertà Il problema dinamico viene formulato con riferimento a strutture con un numero finito di gradi di libertà. Consideriamo le masse concentrate
Instabilità elastica
 . Intro La progettazione degli elementi meccanici soggetti a compressione differisce significativamente da torsione e flessione. A B P Quando una struttura come quella rappresentata in figura è soggetta
. Intro La progettazione degli elementi meccanici soggetti a compressione differisce significativamente da torsione e flessione. A B P Quando una struttura come quella rappresentata in figura è soggetta
Meccanica Applicata alle Macchine
 Meccanica Applicata alle Macchine 06-11-013 TEMA A 1. Un cilindro ed una sfera omogenei di uguale massa m ed uguale raggio r sono collegati tra loro da un telaio di massa trascurabile mediante coppie rotoidali
Meccanica Applicata alle Macchine 06-11-013 TEMA A 1. Un cilindro ed una sfera omogenei di uguale massa m ed uguale raggio r sono collegati tra loro da un telaio di massa trascurabile mediante coppie rotoidali
FM210 / MA - Seconda prova pre-esonero ( )
") FM10 / MA - Seconda prova pre-esonero (3-5-018) 1. Un sistema meccanico è costituito da due sbarre uguali AB e BC, rettilinee, omogenee, di massa M e lunghezza l, incernierate tra loro in B. Le due sbarre
FM10 / MA - Seconda prova pre-esonero (3-5-018) 1. Un sistema meccanico è costituito da due sbarre uguali AB e BC, rettilinee, omogenee, di massa M e lunghezza l, incernierate tra loro in B. Le due sbarre
Alcune strutture, seppur adeguatamente dimensionate dal punto di vista della resistenza, raggiungono il cedimento per fenomeni di instabilità.
 lcune strutture, seppur adeguatamente dimensionate dal punto di vista della resistenza, raggiungono il cedimento per fenomeni di instabilità. osservazione diretta mostra che il comportamento delle travi
lcune strutture, seppur adeguatamente dimensionate dal punto di vista della resistenza, raggiungono il cedimento per fenomeni di instabilità. osservazione diretta mostra che il comportamento delle travi
Lezione 23: Sistemi a più gradi di libertà: sistemi continui (3)
") Lezione 3: Sistemi a più gradi di libertà: sistemi continui 3) Federico Cluni maggio 5 Oscillazioni forzate Si è visto che, nel caso di oscillazioni libere, il moto della trave è dato dalla funzione vx,
Lezione 3: Sistemi a più gradi di libertà: sistemi continui 3) Federico Cluni maggio 5 Oscillazioni forzate Si è visto che, nel caso di oscillazioni libere, il moto della trave è dato dalla funzione vx,
1.3 Sistemi non lineari ad 1 grado di libertà. 1.4 Sistemi non lineari a 2 gradi di libertà 1.5 Sistemi multicorpo. 1.6 La dinamica del corpo rigido
 V Indice XIII XVII 1 1 12 13 19 21 23 25 26 27 27 34 43 52 54 57 62 64 67 67 69 73 75 79 82 Prefazione Introduzione Cap. 1 Sistemi multi-corpo a 1-n gradi di libertà 1.1 Coordinate cartesiane, gradi di
V Indice XIII XVII 1 1 12 13 19 21 23 25 26 27 27 34 43 52 54 57 62 64 67 67 69 73 75 79 82 Prefazione Introduzione Cap. 1 Sistemi multi-corpo a 1-n gradi di libertà 1.1 Coordinate cartesiane, gradi di
Anna Pandolfi Analisi Strutturale e Termica 4.1
 Statica e Cinematica Ammissibili Deformazioni e sforzi sono detti virtuali (non necessariamente veri) quando sono rispettosi di determinate condizioni. Corpo in equilibrio nella configurazione deformata
Statica e Cinematica Ammissibili Deformazioni e sforzi sono detti virtuali (non necessariamente veri) quando sono rispettosi di determinate condizioni. Corpo in equilibrio nella configurazione deformata
DINAMICA DELLE VIBRAZIONI LIBERE DEI SISTEMI A UN GRADO DI LIBERTÁ (SDOF)
") INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF) M. Bozza Copyright AEPRON Tutti i iritti Riservati - www.adepron.it INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF)
INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF) M. Bozza Copyright AEPRON Tutti i iritti Riservati - www.adepron.it INAMICA ELLE VIBRAZIONI LIBERE EI SISTEMI A UN GRAO I LIBERTÁ (SOF)
Figura Per la sezione in figura (lato esterno di 21 cm ed interno di 19 cm), il momento d inerzia è lo stesso in ogni direzione e risulta:
, il momento d inerzia è lo stesso in ogni direzione e risulta:") 7. TEORIA DELLE PIASTRE 7.4.2.4 Esercizio sull instabilità piastre sottili L asta in Figura 7-69 è vincolata con appoggi ad entrambi gli estremi. Tracciare il diagramma P cr l, tenendo presente che l asta
7. TEORIA DELLE PIASTRE 7.4.2.4 Esercizio sull instabilità piastre sottili L asta in Figura 7-69 è vincolata con appoggi ad entrambi gli estremi. Tracciare il diagramma P cr l, tenendo presente che l asta
Lezione 7: Sistemi ad un grado di libertà: l oscillatore elementare (7)
") Lezione 7: Sistemi ad un grado di libertà: l oscillatore elementare (7) Federico Cluni 19 marzo 015 1 Pseudo accelerazione La risposta di un oscillatore elementare con massa m, fattore di smorzamento ν,
Lezione 7: Sistemi ad un grado di libertà: l oscillatore elementare (7) Federico Cluni 19 marzo 015 1 Pseudo accelerazione La risposta di un oscillatore elementare con massa m, fattore di smorzamento ν,
Sistemi non lineari e Funzione Descrittiva
 Sistemi non lineari e Funzione Descrittiva (Complementi di Controlli Automatici: prof. Giuseppe Fusco) Si consideri il sistema a retroazione rappresentato in Figura 1. In un punto generico della catena
Sistemi non lineari e Funzione Descrittiva (Complementi di Controlli Automatici: prof. Giuseppe Fusco) Si consideri il sistema a retroazione rappresentato in Figura 1. In un punto generico della catena
Coppia di forze ONDE ELASTICHE
 Coppia di forze ONDE ELASTICHE LEZIONE N 26d Corso di fisica II Prof. Giuseppe Ciancio 1 Si definisce onda elastica meccanica, la propagazione di una perturbazione con trasporto di energia ma non di materia,
Coppia di forze ONDE ELASTICHE LEZIONE N 26d Corso di fisica II Prof. Giuseppe Ciancio 1 Si definisce onda elastica meccanica, la propagazione di una perturbazione con trasporto di energia ma non di materia,
Lezione XXVI Sistemi vibranti a 1 gdl 9,%5$=,21,75$16,725,(
 ezione XXVI 9,%5$=,,75$6,75,( Quando un sistema dinamico viene sollecitato da una eccitazione non periodica applicata improvvisamente, come nel caso di un impulso, le risposte a tali eccitazioni sono dette
ezione XXVI 9,%5$=,,75$6,75,( Quando un sistema dinamico viene sollecitato da una eccitazione non periodica applicata improvvisamente, come nel caso di un impulso, le risposte a tali eccitazioni sono dette
Nome: Cognome: Data: 18/01/2018
 Esercizio N. 1 Valutazione 4 Sia dato un velivolo, modellato come una trave libera di lunghezza L = 30m in equilibrio sotto l azione di una distribuzione di portanza e del peso P, concentrato sulla fusoliera
Esercizio N. 1 Valutazione 4 Sia dato un velivolo, modellato come una trave libera di lunghezza L = 30m in equilibrio sotto l azione di una distribuzione di portanza e del peso P, concentrato sulla fusoliera
Nome: Cognome: Data: 4/11/2017
 Esercizio N. 1 Valutazione 5 1. Si consideri un lanciatore, lungo L = 40m, fermo sulla rampa di lancio modellato come una trave appoggiata, alla base (x=0m) e a x = 3/4L, come in figura. La sollecitazione
Esercizio N. 1 Valutazione 5 1. Si consideri un lanciatore, lungo L = 40m, fermo sulla rampa di lancio modellato come una trave appoggiata, alla base (x=0m) e a x = 3/4L, come in figura. La sollecitazione
SISTEMI NON LINEARI. Sviluppo in serie SISTEMA LINEARIZZATO
 Linearizzazione SISTEMI NON LINEARI & = f (, u) (t + ) = f((t),u(t) equilibrio ( u, ) δ ( t) = ( t) δu( t) = u( t) u Sviluppo in serie Termini di ordine superiore f f δ ( t) = & ( t) = f ( + δ ( t), u
Linearizzazione SISTEMI NON LINEARI & = f (, u) (t + ) = f((t),u(t) equilibrio ( u, ) δ ( t) = ( t) δu( t) = u( t) u Sviluppo in serie Termini di ordine superiore f f δ ( t) = & ( t) = f ( + δ ( t), u
Esame di Costruzioni Aerospaziali Prof. P. Gasbarri. Nome: Cognome: Data: 16/06/2016
 Esercizio N. 1 Valutazione 4 1. Si consideri un boeing 787 di lunghezza L = 56m e peso complessivo di W= 000KN (con distribuzione uniforme q) in volo orizzontale uniforme. Siano assegnate le posizioni
Esercizio N. 1 Valutazione 4 1. Si consideri un boeing 787 di lunghezza L = 56m e peso complessivo di W= 000KN (con distribuzione uniforme q) in volo orizzontale uniforme. Siano assegnate le posizioni
Nome..Cognome.. Classe 4D 18 dicembre VERIFICA DI FISICA: lavoro ed energia
 Nome..Cognome.. Classe 4D 8 dicembre 008 EIFICA DI FISICA: lavoro ed energia Domande ) Forze conservative ed energia potenziale: (punti:.5) a) Dai la definizione di forza conservativa ed indicane le proprietà.
Nome..Cognome.. Classe 4D 8 dicembre 008 EIFICA DI FISICA: lavoro ed energia Domande ) Forze conservative ed energia potenziale: (punti:.5) a) Dai la definizione di forza conservativa ed indicane le proprietà.
FM210 / MA - Seconda prova pre-esonero ( ) R cos u. dove h è una costante positiva. Oltre alla forza peso, l asta è soggetta ad una forza
 R cos u. dove h è una costante positiva. Oltre alla forza peso, l asta è soggetta ad una forza") FM10 / MA - Seconda prova pre-esonero (6-5-017) Esercizio 1. Un asta rigida omogenea AB di lunghezza R e massa M è vincolata ad avere l estremo A sull asse fisso x, orientato verticalmente verso l alto,
FM10 / MA - Seconda prova pre-esonero (6-5-017) Esercizio 1. Un asta rigida omogenea AB di lunghezza R e massa M è vincolata ad avere l estremo A sull asse fisso x, orientato verticalmente verso l alto,
Corsi di laurea in Matematica e Fisica - Anno Accademico 2017/18 FM210 / MA
 Corsi di laurea in Matematica e Fisica - Anno Accademico 07/8 FM0 / MA Seconda Prova di Esonero [8-5-08]. Un sistema meccanico è costituito da due sbarre uguali, rettilinee, omogenee, pesanti, di massa
Corsi di laurea in Matematica e Fisica - Anno Accademico 07/8 FM0 / MA Seconda Prova di Esonero [8-5-08]. Un sistema meccanico è costituito da due sbarre uguali, rettilinee, omogenee, pesanti, di massa
Linea elastica, scalata per la rappresentazione grafica
 Esercizio N.1 a trave a mensola ha sezione trasversale costante e porta un carico F nella sua estremità libera. Determinare l euazione della linea elastica, lo spostamento e la rotazione in. Ricordiamo
Esercizio N.1 a trave a mensola ha sezione trasversale costante e porta un carico F nella sua estremità libera. Determinare l euazione della linea elastica, lo spostamento e la rotazione in. Ricordiamo
Formulazione delle equazioni del moto per un sistema lineare a tre gradi di libertà. Proprietà delle matrici di rigidezza e di flessibilità
 Formulazione delle equazioni del moto per un sistema lineare a tre gradi di libertà Proprietà delle matrici di rigidezza e di flessibilità Prof. Adolfo Santini - Dinamica delle Strutture Introduzione In
Formulazione delle equazioni del moto per un sistema lineare a tre gradi di libertà Proprietà delle matrici di rigidezza e di flessibilità Prof. Adolfo Santini - Dinamica delle Strutture Introduzione In
ẋ 1 = 2x 1 + (sen 2 (x 1 ) + 1)x 2 + 2u (1) y = x 1
 + 1)x 2 + 2u (1) y = x 1") Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Alcuni esercizi risolti su: - calcolo dell equilibrio di un sistema lineare e valutazione delle proprietà di stabilità dell equilibrio attraverso linearizzazione - calcolo del movimento dello stato e dell
Risolvendo l equazione (6.1) rispetto alla forza adimesionalizzata f = F L/k, si ottiene: f = FL k = ϕ
 rispetto alla forza adimesionalizzata f = F L/k, si ottiene: f = FL k = ϕ") Capitolo 6 STABILITA DELL EQUILIBRIO ELASTICO (prof. Elio Sacco) 6.1 Sistemi articolati rigidi Si consideri una mensola rigida vincolata tramite un supporto elastico di rigidezza k, soggetta a carico assiale,
Capitolo 6 STABILITA DELL EQUILIBRIO ELASTICO (prof. Elio Sacco) 6.1 Sistemi articolati rigidi Si consideri una mensola rigida vincolata tramite un supporto elastico di rigidezza k, soggetta a carico assiale,
Esercizi. Funzioni di trasferimento. Dato un sistema LTI descritto dalle equazioni di stato:
 Esercizi 4, 1 Esercizi Funzioni di trasferimento Dato un sistema LTI descritto dalle equazioni di stato: Trasformando con Laplace si ottiene la seguente espressione per l uscita: Risposta libera Risposta
Esercizi 4, 1 Esercizi Funzioni di trasferimento Dato un sistema LTI descritto dalle equazioni di stato: Trasformando con Laplace si ottiene la seguente espressione per l uscita: Risposta libera Risposta
Università degli Studi Mediterranea di Reggio Calabria Facoltà d Ingegneria Meccanica Razionale A.A. 2005/ Appello del 04/07/2006
 Facoltà d Ingegneria Meccanica Razionale A.A. 2005/2006 - Appello del 04/07/2006 In un piano verticale Oxy, un sistema materiale è costituito da un disco omogeneo, di centro Q, raggio R e massa 2m, e da
Facoltà d Ingegneria Meccanica Razionale A.A. 2005/2006 - Appello del 04/07/2006 In un piano verticale Oxy, un sistema materiale è costituito da un disco omogeneo, di centro Q, raggio R e massa 2m, e da
Soluzione Compitino Fisica Generale I Ing. Elettronica e Telecomunicazioni 02 Maggio 2017
 Soluzione Compitino Fisica Generale I Ing. Elettronica e Telecomunicazioni 02 Maggio 2017 Esercizio 1 1) Sulla tavola agiscono: a) la forza peso, diretta ortogonalmente al moto; b) le reazioni normali
Soluzione Compitino Fisica Generale I Ing. Elettronica e Telecomunicazioni 02 Maggio 2017 Esercizio 1 1) Sulla tavola agiscono: a) la forza peso, diretta ortogonalmente al moto; b) le reazioni normali
Nome: Cognome: Data: 14/02/2017
 Esercizio N. 1 Valutazione 4 Un elicottero dal peso P= 6800Kg si trova in condizioni di punto fisso, ovvero in condizione di equilibrio (orizzontale e verticale). La distribuzione delle forze sulle due
Esercizio N. 1 Valutazione 4 Un elicottero dal peso P= 6800Kg si trova in condizioni di punto fisso, ovvero in condizione di equilibrio (orizzontale e verticale). La distribuzione delle forze sulle due
7. Forze elastiche. Nella figura 1 il periodo è T = 2s e corrisponde ad un moto unidimensionale limitato tra i valori x = 0 ed x = 1.
 1 Moti periodici 7. Forze elastiche Un caso particolare di moto accelerato è un moto periodico. In figura 1 è riportato un esempio di moto periodico unidimensionale. Un moto periodico si ripete identicamente
1 Moti periodici 7. Forze elastiche Un caso particolare di moto accelerato è un moto periodico. In figura 1 è riportato un esempio di moto periodico unidimensionale. Un moto periodico si ripete identicamente
Esame 12/02/2004 Soluzione
 Teoria dei Sistemi Dinamici 1GTG/2GTG Esame 12/2/24 Prego segnalare errori o inesattezze a basilio.bona@polito.it 1 Sistemi di riferimento, rototraslazioni (6 punti) Esercizio 1.1 Costruire la matrice
Teoria dei Sistemi Dinamici 1GTG/2GTG Esame 12/2/24 Prego segnalare errori o inesattezze a basilio.bona@polito.it 1 Sistemi di riferimento, rototraslazioni (6 punti) Esercizio 1.1 Costruire la matrice
Principio d inerzia. Perché avviene il moto??
 Dinamica del punto Argomenti della lezione Principio di inerzia (prima legge di Newton) 2 legge di Newton 3 legge di Newton (principio di azione e reazione) Quantità di moto Risultante delle forze / Equilibrio
Dinamica del punto Argomenti della lezione Principio di inerzia (prima legge di Newton) 2 legge di Newton 3 legge di Newton (principio di azione e reazione) Quantità di moto Risultante delle forze / Equilibrio
FM210 / MA - Secondo scritto ( )
") FM10 / MA - Secondo scritto (6-7-017) Esercizio 1. Un asta rigida omogenea di lunghezza l e massa M è vincolata a muoversi su un piano verticale di coordinate x-y (con l asse x orizzontale e l asse y verticale,
FM10 / MA - Secondo scritto (6-7-017) Esercizio 1. Un asta rigida omogenea di lunghezza l e massa M è vincolata a muoversi su un piano verticale di coordinate x-y (con l asse x orizzontale e l asse y verticale,
UNIVERSITA DI PISA - ANNO ACCADEMICO CORSO DI LAUREA IN ING. ELETTRICA (N.O.) CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE
 CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE") UNIVERSITA DI PISA - ANNO ACCADEMICO 007-8 CORSO DI LAUREA IN ING. ELETTRICA (N.O.) CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE VERIFICA INTERMEDIA DEL 15-06-009 t1ta0t0nt0ts1e1esercizio
UNIVERSITA DI PISA - ANNO ACCADEMICO 007-8 CORSO DI LAUREA IN ING. ELETTRICA (N.O.) CORSO DI MECCANICA E TECNICA DELLE COSTRUZIONI MECCANICHE VERIFICA INTERMEDIA DEL 15-06-009 t1ta0t0nt0ts1e1esercizio
2. Vibrazioni longitudinali nelle barre
 . Vibrazioni longitudinali nelle barre Si richiama, all interno di questo paragrafo, l analisi delle vibrazioni longitudinali di barre nell intorno della configurazione di equilibrio statico. Si ipotizzi,
. Vibrazioni longitudinali nelle barre Si richiama, all interno di questo paragrafo, l analisi delle vibrazioni longitudinali di barre nell intorno della configurazione di equilibrio statico. Si ipotizzi,
EQUAZIONE DELLA LINEA ELASTICA
 ESERCIZI SVOLTI O CON TRACCIA DI SOLUZIONE SU EQUAZIONE DELLA LINEA ELASTICA v 0.9 Calcolare lo spostamento verticale del pattino A della struttura utilizzando l equazione della linea elastica. Materiale:
ESERCIZI SVOLTI O CON TRACCIA DI SOLUZIONE SU EQUAZIONE DELLA LINEA ELASTICA v 0.9 Calcolare lo spostamento verticale del pattino A della struttura utilizzando l equazione della linea elastica. Materiale:
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 13/1/2018
 Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 13/1/2018 Nome... N. Matricola... Ancona, 13 gennaio 2018 1. Un sistema rigido piano è costituito
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 13/1/2018 Nome... N. Matricola... Ancona, 13 gennaio 2018 1. Un sistema rigido piano è costituito
PROVA SCRITTA DI MECCANICA RAZIONALE (12 gennaio 2018) (Prof. A. Muracchini)
 (Prof. A. Muracchini)") PRV SRITT DI MENI RZINLE (12 gennaio 2018) Il sistema in figura, mobile in un piano verticale, è costituito di un disco rigido D, omogeneo (massa M, raggio R) vincolato in modo che il punto del suo bordo
PRV SRITT DI MENI RZINLE (12 gennaio 2018) Il sistema in figura, mobile in un piano verticale, è costituito di un disco rigido D, omogeneo (massa M, raggio R) vincolato in modo che il punto del suo bordo
Prova d esame del 15 febbraio 2012 Soluzione
 Prova d esame del febbraio Soluzione La struttura data può essere modellata come un sistema a 3 gradi di libertà. Scegliamo come coordinate lagrangiane gli spostamenti orizzontale e verticale di B e lo
Prova d esame del febbraio Soluzione La struttura data può essere modellata come un sistema a 3 gradi di libertà. Scegliamo come coordinate lagrangiane gli spostamenti orizzontale e verticale di B e lo
F, viene allungata o compressa di un tratto s rispetto alla sua posizione di equilibrio.
 UNIÀ 4 L EQUILIBRIO DEI SOLIDI.. La forza elastica di una molla.. La costante elastica e la legge di Hooke. 3. La forza peso. 4. Le forze di attrito. 5. La forza di attrito statico. 6. La forza di attrito
UNIÀ 4 L EQUILIBRIO DEI SOLIDI.. La forza elastica di una molla.. La costante elastica e la legge di Hooke. 3. La forza peso. 4. Le forze di attrito. 5. La forza di attrito statico. 6. La forza di attrito
Cenni di Stabilità Computazionale
 Cenni di Stabilità Computazionale Lezione associata al cap.7 delle dispense del corso. Prof. Claudio Borri Ing. Enzo Marino 1 Dipartimento di Ingegneria Civile e Ambientale 1 email: enzo.marino@dicea.unifi.it
Cenni di Stabilità Computazionale Lezione associata al cap.7 delle dispense del corso. Prof. Claudio Borri Ing. Enzo Marino 1 Dipartimento di Ingegneria Civile e Ambientale 1 email: enzo.marino@dicea.unifi.it
Sistemi LTI a tempo continuo
 Esercizi 4, 1 Sistemi LTI a tempo continuo Equazioni di stato, funzioni di trasferimento, calcolo di risposta di sistemi LTI a tempo continuo. Equilibrio di sistemi nonlineari a tempo continuo. Esercizi
Esercizi 4, 1 Sistemi LTI a tempo continuo Equazioni di stato, funzioni di trasferimento, calcolo di risposta di sistemi LTI a tempo continuo. Equilibrio di sistemi nonlineari a tempo continuo. Esercizi
Esercizi. Sistemi LTI a tempo continuo. Esempio. Funzioni di trasferimento
 Esercizi 4, 1 Esercizi Funzioni di trasferimento Dato un sistema LTI descritto dalle equazioni di stato: Esercizi 4, 2 Sistemi LTI a tempo continuo Trasformando con Laplace si ottiene la seguente espressione
Esercizi 4, 1 Esercizi Funzioni di trasferimento Dato un sistema LTI descritto dalle equazioni di stato: Esercizi 4, 2 Sistemi LTI a tempo continuo Trasformando con Laplace si ottiene la seguente espressione
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018.
 Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018 Prova teorica - A Nome... N. Matricola... Ancona, 10 febbraio 2018 1. Un asta AB di lunghezza
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018 Prova teorica - A Nome... N. Matricola... Ancona, 10 febbraio 2018 1. Un asta AB di lunghezza
REGISTRO DELLE LEZIONI di Metodi agli Elementi Finiti
 UNIVERSITÀ DEGLI STUDI CAGLIARI FACOLTÀ DI INGEGNERIA E ARCHITETTURA REGISTRO DELLE LEZIONI di Metodi agli Elementi Finiti dettate dal prof. Filippo Bertolino nell Anno Accademico 2013-14 ARGOMENTO DELLA
UNIVERSITÀ DEGLI STUDI CAGLIARI FACOLTÀ DI INGEGNERIA E ARCHITETTURA REGISTRO DELLE LEZIONI di Metodi agli Elementi Finiti dettate dal prof. Filippo Bertolino nell Anno Accademico 2013-14 ARGOMENTO DELLA
y x y x A (x 1,y 1 ) = (c, f(c)) B(x 2,y 2 ) = (c+h, f(c+h)) m =
 = (c, f(c)) B(x 2,y 2 ) = (c+h, f(c+h)) m =") DERIVATA DI UNA FUNZIONE IN UN PUNTO SIGNIFICATO GEOMETRICO. EQUAZIONE DELLA RETTA TANGENTE AL GRAFICO NEL PUNTO DI TANGENZA. REGOLE DI DERIVAZIONE. CONTINUITA E DERIVABILITA PUNTI DI NON DERIVABILITA
DERIVATA DI UNA FUNZIONE IN UN PUNTO SIGNIFICATO GEOMETRICO. EQUAZIONE DELLA RETTA TANGENTE AL GRAFICO NEL PUNTO DI TANGENZA. REGOLE DI DERIVAZIONE. CONTINUITA E DERIVABILITA PUNTI DI NON DERIVABILITA
Sistemi Dinamici. Corrado Santoro
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Definizione di Sistema Un
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione Sistemi Robotici Definizione di Sistema Un
Teoria dei Sistemi Dinamici
 Teoria dei Sistemi Dinamici 01GTG - 0GTG Soluzione dell Esame del 03/11/009 1 Esercizio 1 Sistema meccanico 1.1 Testo Si consideri il sistema meccanico planare schematizzato nella Fig. 1, descritto come
Teoria dei Sistemi Dinamici 01GTG - 0GTG Soluzione dell Esame del 03/11/009 1 Esercizio 1 Sistema meccanico 1.1 Testo Si consideri il sistema meccanico planare schematizzato nella Fig. 1, descritto come
EQUAZIONI DI LAGRANGE E STAZIONARIETÀ DEL POTENZIALE
 EQUAZIONI DI LAGRANGE E STAZIONARIETÀ DEL POTENZIALE Equazioni di Lagrange in forma non conservativa Riprendiamo l equazione simbolica della dinamica per un sistema olonomo a vincoli perfetti nella forma
EQUAZIONI DI LAGRANGE E STAZIONARIETÀ DEL POTENZIALE Equazioni di Lagrange in forma non conservativa Riprendiamo l equazione simbolica della dinamica per un sistema olonomo a vincoli perfetti nella forma
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 30 Gennaio 207 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi in un piano un sistema di riferimento Oxy. In
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 30 Gennaio 207 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi in un piano un sistema di riferimento Oxy. In
Laurea Triennale in Matematica Fisica Matematica ore 14:30 15 Giugno 2017 Durata: 3 ore
 Laurea Triennale in Matematica Fisica Matematica ore 14:30 15 Giugno 2017 Durata: 3 ore Attenzione: Riconsegnerete DUE fogli (protocollo bianco, a 4 facciate), scriverete chiaramente cognome e nome, data
Laurea Triennale in Matematica Fisica Matematica ore 14:30 15 Giugno 2017 Durata: 3 ore Attenzione: Riconsegnerete DUE fogli (protocollo bianco, a 4 facciate), scriverete chiaramente cognome e nome, data
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica I parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica I parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
DINAMICA DI SISTEMI AEROSPAZIALI
 DINAMICA DI SISTEMI AEROSPAZIALI Esercizio 1. Un corsoio di massa m scorre su un piano orizzontale con attrito radente di coefficiente f d. Al corsoio, in C, è collegata la biella B C, di lunghezza b e
DINAMICA DI SISTEMI AEROSPAZIALI Esercizio 1. Un corsoio di massa m scorre su un piano orizzontale con attrito radente di coefficiente f d. Al corsoio, in C, è collegata la biella B C, di lunghezza b e
Dinamica: Forze e Moto
 Dinamica del punto Argomenti della lezione: 1 legge di Newton (principio di inerzia) 2 legge di Newton 3 legge di Newton (principio di azione e reazione) Quantità di moto Risultante delle forze / Equilibrio
Dinamica del punto Argomenti della lezione: 1 legge di Newton (principio di inerzia) 2 legge di Newton 3 legge di Newton (principio di azione e reazione) Quantità di moto Risultante delle forze / Equilibrio
PIANO di LAVORO A. S. 2013/ 2014
 Nome docente Vessecchia Laura Materia insegnata Fisica Classe Prima E ITIS Previsione numero ore di insegnamento ore complessive di insegnamento 3 ore settimanali di cui in compresenza 1 ora di cui di
Nome docente Vessecchia Laura Materia insegnata Fisica Classe Prima E ITIS Previsione numero ore di insegnamento ore complessive di insegnamento 3 ore settimanali di cui in compresenza 1 ora di cui di
Politecnico di Milano Ingegneria Industriale Analisi e Geometria 1 Secondo Appello 9 Luglio 2014
 Politecnico di Milano Ingegneria Industriale Analisi e Geometria Secondo Appello 9 Luglio Cognome: Nome: Matricola: Compito A Es: punti Es: 6 punti Es: 8 punti Es: 8 punti Totale Data la funzione f : D
Politecnico di Milano Ingegneria Industriale Analisi e Geometria Secondo Appello 9 Luglio Cognome: Nome: Matricola: Compito A Es: punti Es: 6 punti Es: 8 punti Es: 8 punti Totale Data la funzione f : D
Φ D 2 L. k > 0. M O=A s. sistema (che è rappresentato in figura ). Infine, vogliamo calcolare le reazioni vincolari sul sistema.
. Infine, vogliamo calcolare le reazioni vincolari sul sistema.") Esercizio 1. Un sistema materiale è costituito da una lamina piana omogenea di massa M e lato L e da un asta AB di lunghezza l e massa m. La lamina scorre con un lato sull asse x ed è soggetta a una forza
Esercizio 1. Un sistema materiale è costituito da una lamina piana omogenea di massa M e lato L e da un asta AB di lunghezza l e massa m. La lamina scorre con un lato sull asse x ed è soggetta a una forza
Prova Scritta di di Meccanica Analitica
 Prova Scritta di di Meccanica Analitica 7 gennaio 015 Problema 1 Un punto di massa unitaria si muove sull asse x soggetto al potenziale V (x) = x e x a) Determinare le posizioni di equilibrio e la loro
Prova Scritta di di Meccanica Analitica 7 gennaio 015 Problema 1 Un punto di massa unitaria si muove sull asse x soggetto al potenziale V (x) = x e x a) Determinare le posizioni di equilibrio e la loro
Lezione PONTI E GRANDI STRUTTURE. Prof. Pier Paolo Rossi Università degli Studi di Catania
 Lezione PONTI E GRANDI STRUTTURE Prof. Pier Paolo Rossi Università degli Studi di Catania Problema del De Saint Venant Si consideri una trave a sezione costante incastrata ad un estremo e sottoposta ad
Lezione PONTI E GRANDI STRUTTURE Prof. Pier Paolo Rossi Università degli Studi di Catania Problema del De Saint Venant Si consideri una trave a sezione costante incastrata ad un estremo e sottoposta ad
Scritto di Analisi II e Meccanica razionale del
 Scritto di Analisi II e Meccanica razionale del 06.09.01 Meccanica razionale. Esercizio 1 Un recipiente cilindrico omogeneo, di massa m, area di base A e altezza h, completamente chiuso, poggia sul piano
Scritto di Analisi II e Meccanica razionale del 06.09.01 Meccanica razionale. Esercizio 1 Un recipiente cilindrico omogeneo, di massa m, area di base A e altezza h, completamente chiuso, poggia sul piano
TECNICA DELLE COSTRUZIONI PROVA SCRITTA DEL 20 SETTEMBRE Nome Cognome matricola
 Nome ognome matricola Note Giudizio sufficiente appena sufficiente Insufficiente F h TI: = 1.50 m = 4.00 m = 8.00 m EJ = cost E = F h = 30 kn L llievo risolva la struttura con metodo a scelta, tracci i
Nome ognome matricola Note Giudizio sufficiente appena sufficiente Insufficiente F h TI: = 1.50 m = 4.00 m = 8.00 m EJ = cost E = F h = 30 kn L llievo risolva la struttura con metodo a scelta, tracci i
Meccanica Dinamica del punto materiale
 Meccanica 13-14 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente y m N mg mg
Meccanica 13-14 Dinamica del punto materiale 8 Dinamica del punto materiale Legge fondamentale della dinamica: d r ma m dt Tipi di forza: orza peso Reazione vincolare orza di attrito radente y m N mg mg
Metodi di riduzione del modello dinamico Dott. Lotti Nevio
 1. Metodi di riduzione del modello dinamico Nel mettere insieme modelli dinamici di elementi diversi di una struttura (come avviene nel caso di un velivolo e del suo carico utile, ma anche per i diversi
1. Metodi di riduzione del modello dinamico Nel mettere insieme modelli dinamici di elementi diversi di una struttura (come avviene nel caso di un velivolo e del suo carico utile, ma anche per i diversi
Unità didattica 3. Terza unità didattica (Fisica) 1. Corso integrato di Matematica e Fisica per il Corso di Farmacia
 1. Corso integrato di Matematica e Fisica per il Corso di Farmacia") Unità didattica 3 Elasticità dei materiali Deformazione di un solido..2 Legge di Hooke.. 3 Forza elastica.. 4 Deformazione elastica di una molla... 5 Accumulo di energia attraverso la deformazione elastica..6
Unità didattica 3 Elasticità dei materiali Deformazione di un solido..2 Legge di Hooke.. 3 Forza elastica.. 4 Deformazione elastica di una molla... 5 Accumulo di energia attraverso la deformazione elastica..6
Parte 3, 1. Stabilità. Prof. Thomas Parisini. Fondamenti di Automatica
 Parte 3, 1 Stabilità Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
Parte 3, 1 Stabilità Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
Stabilità: Stabilità. Stabilità: il caso dei sistemi dinamici a tempo continuo. Stabilità dell equilibrio
 Parte 3, 1 Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) Stabilità - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo
Parte 3, 1 Parte 3, 2 Stabilità: - del movimento (vedere libro ma non compreso nel programma) Stabilità - dell equilibrio - del sistema (solo sistemi lineari) Analizzeremo separatamente sistemi a tempo