Sintesi!delle!attività!di!sviluppo!di!un! dispositivo!inerziale!passivo!per!la! produzione!di!energia!dal!moto!ondoso! !!!!!!! Report!RdS/PAR2013/172!
|
|
|
- Natalia Grandi
- 5 anni fa
- Visualizzazioni
Transcript




1 Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Sintesidelleattivitàdisviluppodiun dispositivoinerzialepassivoperla produzionedienergiadalmotoondoso G.Mattiazzo,E.Giorcelli,G.Bracco,E.Giovannini,A.Fontanella, A.Carillo,G.Sannino ReportRdS/PAR213/172
2 SINTESI DELLE ATTIVITÀ DI SVILUPPO DI UN DISPOSITIVO INERZIALE PASSIVO PER LA PRODUZIONE DI ENERGIADALMOTOONDOSO G.Mattiazzo(PolitecnicodiTorino),E.Giorcelli(PolitecnicodiTorino),G.Bracco(PolitecnicodiTorino),E. Giovannini(ENEARUTRIN),A.Fontanella(ENEARUTRIN),A.Carillo(ENEARUTMEA),G.Sannino(ENEARUTMEA) Settembre 214 ReportRicercadiSistemaElettrico AccordodiProgrammaMinisterodelloSviluppoEconomicoRENEA PianoAnnualediRealizzazione213 Area:Produzione di energia elettrica e protezione dell'ambiente Progetto:Studi e valutazioni sulla produzione di energia elettrica dalle correnti marine e dal moto ondoso Obiettivo:Sviluppodiunsistema oscilalnte passivo per il recupero di energia dal moto ondoso ResponsabiledelProgetto:G.Sannino,ENEA
3 Indice SOMMARIO INTRODUZIONE DESCRIZIONEDELLEATTIVITÀSVOLTEERISULTATI DESCRIZIONEDELPROTOTIPO DISEGNICOSTRUTTIVI VERIFICHEEPROVEPRELIMINARI Stabilizzazione&dello&scafo&...& L assetto&del&generatore&...& Identificazione&dell attrito&attorno&all asse&ε&...& SVOLGIMENTODELLEPROVE Il&canale&di&prova&...& Il&setup&sperimentale&...& Il&sistema&di&ormeggio&...& Misura&del&profilo&dell onda&...& Misura&dell angolo&δ di&beccheggio&dello&scafo&...& Misura&di&angolo,&velocità&e&coppia&agenti&sul&PTO&...& Il&sistema&di&controllo&del&PTO&...& Metodologia&di&esecuzione&delle&prove&...& RISULTATIDELLEPROVE VALIDAZIONEDELMODELLOANALITICO CONCLUSIONI RIFERIMENTIBIBLIOGRAFICI
4 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Sommario Leattivitàsvoltenell ambitodell accordodicollaborazionetraeneaepolitecnicoditorino,dipartimento di Ingegneria Meccanica e Aerospaziale, hanno riguardato la progettazione, realizzazione e sperimentazionediunsistemadiconversionedell energiadamotoondosoamassaoscillante. Nel presente lavoro si mostra l attività di sperimentazione sul prototipo del sistema di conversione di energiadamotoondosoamassaoscillante.intalesistemaleondeprovocanol oscillazionedelloscafoche latrasmettealpendolocontenutointernamente.ilmotorelativoscaforpendoloattivaungeneratoreche produceenergiaelettrica. Il prototipo in scala realizzato in collaborazione con ENEA è stato provato sperimentalmente presso il canalediprovadelpolitecnicoditorinoperdiversecondizionidimotoondosoeparametridicontrollodel sistema. Irisultatidellacampagnaditestsonostaticonfrontaticonunmodellonumericodelsistemacheèstato sviluppatoall internodell accordodicollaborazione.ilmodellonumericosimulaladinamicadelsistemae lapotenzaprodottadalconvertitoreapartiredall ondaincidente. Talemodelloabbinatoaunaproceduradisintonizzazionehaprodottounabuonaconcordanzaconidati sperimentali. 4

5 1 Introduzione Oggettodell AccordodiCollaborazioneèlaprogettazione,realizzazioneesperimentazioneinscaladiun sistemadiproduzionedienergiadamotoondosoamassaoscillante. IlprototipoèstatoprogettatoincollaborazioneENEA PolitecnicodiTorinoedèstatoprovatopressoil canalediprovadelpolitecnicoditorino.lasperimentazioneelacomparazionedeirisultaticonilmodello numericosonodiseguitodescritti. 2 Descrizionedelleattivitàsvolteerisultati 2.1 Descrizione&del&prototipo& Il dispositivo, rappresentato in Figura 1, è costituito da un pendolo in grado di oscillare su un grado di libertà,installatosuunoscafogalleggiante.ilmovimentodibeccheggiocausatodalleondeètrasmessoal pendolo,sulcuiassedirotazioneècalettatoilgeneratoredienergiaelettrica. Figura'1')'Prototipo'sperimentale'in'scala' 5

6 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Figura'2' 'Schema'di'riferimento' Loscafoècostituitodalamierediacciaioinossidabileda1mmdispessoresaldatetraloro.Haformadi semicilindroadasseorizzontale,conduealettelateraliperfavorirnel allineamentorispettoalladirezione d incidenzadell onda. Alloscafoècollegatorigidamenteuntelaiochesupportalacelladicarico,ilgeneratoreelettricoel intero meccanismoapendolo. & 6
7 2.2 Disegni&costruttivi& Sonoriportatidiseguitoidisegnicostruttiviutilizzatiperlafabbricazionedelprototipoinscala.Ilprogetto sicomponedi3tavole,elencateintabella1. Tabella'1)'Elenco'delle'tavole' TAVOLA'n.' CONTENUTO' 1 Totale 2 Cella 3 Boccolafilettata 4 Pernomotore 5 Pernopiastra 6 Generatore 7 Piastrafissaggio 8 Ghieramodificata 9 Tappochiusura 1 Statoreesterno 11 Piastraforata 12 Pendolo 13 Giuntoalbero 14 Boccolafissaggio 15 Discoinerzia 16 Massacentrale 17 Massalaterale 18 Barrefilettate 19 Telaio 2 Laterale1 21 Laterale2 22 Traversa 23 Guida 24 Base 25 Scafo 26 Lamieraforata 27 Longherone 28 Culla 29 Parete 3 Coperchio 7
8 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&1&-&Totale " 8"
9 """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" " &Tavola&2&&-&Cella " 9"
10 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&3&-&Boccola&filettata& 1
11 Tavola&4&-&Perno&motore& 11
12 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&5&-&Perno&piastra 12
13 Tavola&6&(&Generatore& 13
14 ACCORDO&DI&PROGRAMMA&MSE(ENEA& &Tavola&7&(&Piastra&fissaggio& 14
15 Tavola&8&&(&Ghiera&modificata 15
16 ACCORDO&DI&PROGRAMMA&MSE(ENEA& Tavola&9&(&Tappo&chiusura& 16
17 Tavola&1&(&Statore&esterno& 17
18 ACCORDO&DI&PROGRAMMA&MSE(ENEA& Tavola&11&(&Piastra&forata& 18
19 Tavola&12&(&Pendolo 19
20 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&13&-&Giunto&albero& 2
21 Tavola&14&-&Boccola&fissaggio& 21
22 ACCORDO&DI&PROGRAMMA&MSE-ENEA& &Tavola&15&-&Disco&inerzia& 22
23 Tavola&16&-&Massa¢rale& 23
24 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&17&-&Massa&laterale& 24
25 &Tavola&18&-&Barre&filettate 25
26 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&19&-&Telaio 26
27 Tavola&2&)&Laterale&1& 27
28 ACCORDO&DI&PROGRAMMA&MSE)ENEA& Tavola&21&)&Laterale&2& 28
29 Tavola&22&)&Traversa 29
30 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&23&-&Guida& 3
31 Tavola&24&-&Base& 31
32 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&25&-&Scafo& 32
33 Tavola&26&-&Lamiera&forata& 33
34 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&27&-&Longherone& 34
35 Tavola&28&-&Culla& 35
36 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Tavola&29&-&Parete& 36
37 Tavola&3&-&Coperchio 37
38 ACCORDO&DI&PROGRAMMA&MSE-ENEA& 2.3 Verifiche&e&prove&preliminari& Leverifichehannoriguardato: 4 L assenzadidifettidifabbricazione 4 Latenutadelloscafoall acqua Entrambeleverifichehannodatoesitopositivo. Leprovepreliminarihannoavutolafinalitàdideterminare: 4 Lastabilizzazionedelloscafo 4 L assettodelgeneratore 4 L attritoattornoall asseε Stabilizzazionedelloscafo All internodelloscafosottolabasedelpendolosonostateinseritelemassedibilanciamentoperregolare l altezzadelbaricentrorispettoallalineadigalleggiamento.talealtezzadeveesseretaledagarantirela stabilitàdelloscafosiarispettoilrolliocheilbeccheggio.lastabilitàèintesacomelacapacitàdelsistemadi ritrovarel equilibrioafrontediunapiccolaperturbazione. Con una serie di prove in acqua ferma, si è verificato che posizionando le masse di stabilizzazione nella parteinferioredelloscafo,ottenendoilpesoprevistodi75kg,ilsistemaèstabilenelleduecoordinatedi rollioebeccheggiointuttelecondizionidiassettodelgeneratore. Lamassadizavorraèottenutaconblocchidiacciaiosagomati,collocatialfondodelloscafo,nellospazio tralepiastreforatediappoggiodeltelaioelalamierasemicilindrica. 38

39 2.3.2 L assettodelgeneratore Figura'3' 'vista'interna'del'prototipo' IltelaiodisostegnodelPTOhaunaseriediforiconcuièpossibilefissareilgeneratoreadiversealtezze rispetto al fondo dello scafo, in modo da spostare il baricentro dello scafo e conseguentemente la sua rispostainampiezza. Il telaio è costituito da elementi di alluminio anodizzato assemblati con viti. Sono possibili 22 differenti settaggi,masolo16sonoeffettivamente utilizzabili allamassimalunghezzadelpendolo perproblemidi interferenzetralepartiinmovimento. LaFigura4mostrailimitidisettaggiodellamassaoscillante. Posizionamento dellemassedi stabilizzazione 39
eilbaricentrodelloscafonelle diverseconfigurazioniutili. Tabella'2'4'Configurazioni'geometriche'del'pendolo' Configurazione' n.")
40 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Figura'4'4'Impostazione'della'posizione'della'cerniera'del'pendolo'(asse'del'PTO)' LaTabella2riportaladistanzatralacernieradelpendolo(distanzaCG)eilbaricentrodelloscafonelle diverseconfigurazioniutili. Tabella'2'4'Configurazioni'geometriche'del'pendolo' Configurazione' n.' Distanza'CG' m' 1,5968 2,4923 3, , ,4418 6,4228 7,4543 8,3886 9,3768 1, , , , , , ,2496 4
41 IlcomportamentoidrodinamicodelloscafoèstatostudiatomediantesimulazionenumericaconANSYS AQUA.L amplificazionedell oscillazione,espressadal ResponseAmplitudeOperator perlediverse configurazionièriportatoinfigura5. RAO x Config. 1 Config. 4 Config. 7 Config. 1 Config. 13 Config Periodo (s) RAO z Config. 1 Config. 4 Config. 7 Config. 1 Config. 13 Config Periodo (s) RAO pitch Config. 1 Config. 4 Config. 7 Config. 1 Config. 13 Config. 16 Figura'5' 'RAO'per'le'tre'coordinate'' Dallesimulazioninumericherisultachel ampiezzadioscillazionemaggioresiottieneperlaconfigurazione n.1,cioèquellaallamassimaaltezzadalfondodelloscafo.leprovesperimentalisonostatequindisvolte contaleconfigurazionepercercarelemassimeproduttivitàdienergia Identificazionedell attritoattornoall asseε L attritosulpernodelpendoloelaresistenzaaerodinamicadellamassaoscillanteinfluenzanolarisposta delsistemainquantorappresentanounacausadidissipazionedienergia.cometestpreliminareprimadi procederealleprovepressoilcanalesièquindiidentificatotaleattritotramiteunaprovaconptospento, scafobloccatoefornendoun oscillazioneinizialeallamassa.lamassahaquindicompiutoun oscillazione smorzata fino ad arrestarsi. Utilizzando tecniche di curve fitting sui dati sperimentali si è identificato il parametrodiattritoviscosoequivalentedegliattritireali Periodo (s) 41
42 ACCORDO&DI&PROGRAMMA&MSE-ENEA& 1 Experimental data ε [deg] Figura'6' 'Oscillazione'smorzata'del'pendolo' Ilmodellodiattritoviscosoapplicatosulsistemapendoloinevoluzioneliberaprevedelaseguenteleggedel moto: = sin + Doveξèilfattoredismorzamentoeω d lapulsazionedelsistemasmorzato( = 1 ). L equazionelinearizzatadelmotoliberodelpendoloattornoalsuoasseèlaseguente: Chepuòessereriscrittanellaseguenteforma: Einformacanonica: Time [s] = + + = = 42
43 Dallaqualerisultacheilcoefficientedismorzamentorappresentativodegliattritièscrivibilecomesegue = 2 Laproceduradifittingaiminimiquadratiprevedeilseguenteiter: 1. scritturadellacifradierrorefraidatisperimentalielaleggedelmoto 2. variazionetramitialgoritmodiricercadelminimodeiparametridellaleggedelmoto(ξ,ω n eφ)in mododaottenerelamigliorapprossimazionedellacurvasperimentale 3. calcolodelcoefficientediattritoviscosoequivalentec IrisultatiditaleprocedurasonoesemplificatinellaFigura7eriportatiinTabella Damping evaluation - m P =3 kg ; l=.334 m Exp Best-fit ε [deg] Time [s] Figura'7' 'Curve'fitting'su'dati'sperimentali' Tabella'3' 'Prove'di'identificazione'attrito' Massa'(kg)' l'(m)' Periodo' Fattore'di'smorzamento' naturale(s)' (Nms/rad)' 3,19,929,467 3,334 1,175,743 43
44 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Sono state eseguite prove per valutare l attrito del sistema con massa di 3 kg e per due lunghezze di pendolodiverse.ilcoefficientedismorzamentoequivalentedegliattritirisultamaggioreperlunghezzadel pendolo maggiore. Questo è fisicamente accettabile in quanto gli attriti aerodinamici aumentano all aumentaredellalunghezza. 2.4 Svolgimento&delle&prove& LeprovesperimentalisisonosvoltenelcanalediprovapresentepressoilPolitecnicodiTorino,lungo5.4 melargo6mm.laprofonditàdell acquapuòesserevariatatramiteunosfioratore. Le prove consistono nel sottoporre il dispositivo, disposto nella configurazione n. 1, a onde regolari con altezza.5meperiododa.8a1.4s,percirca12secondi. Perimpedireiltrascinamentodelloscafolungoilcanaledapartedelleondeincidenti,vieneinstallatoun sistemadiormeggioancoratoalfondodelcanale Ilcanalediprova IlcanalediprovapresentepressoilPolitecnicodiTorinoèlungo5.4melargo6mm.Laprofondità dell acquapuòesserevariatatramiteunosfioratore.perlosvolgimentodeitestdescrittiinquestoreportla profonditàdell acquaèstataconfigurataa6mm. Aun estremitàdelcanaleèpresenteunbattitorechegeneral onda,chesipropagaattraversoilcanalee giunge al punto in cui è posizionato il prototipo. Parte dell onda prosegue poi oltre il prototipo fino a giungereall estremitàoppostadelcanaledovedissipalasuaenergiapressol assorbitoreiviposizionato. Partedell ondavieneriflessainveceversoilbattitore. 44
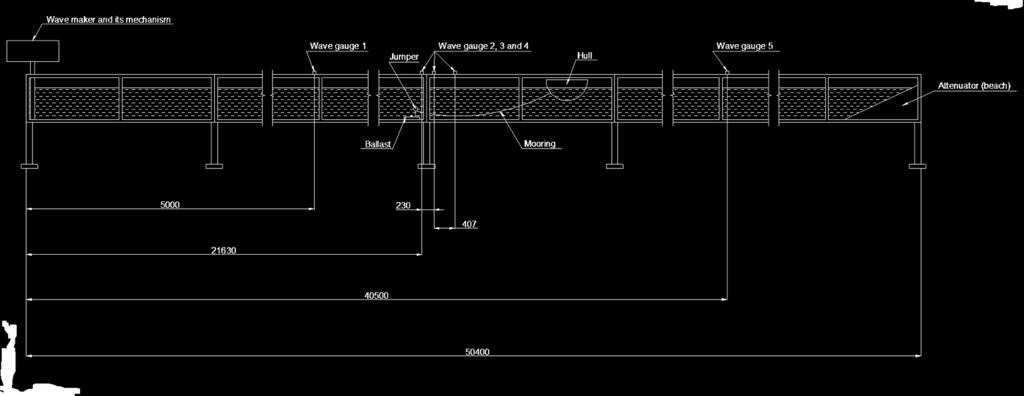
45 Figura'8' 'Layout'del'canale'di'prova' 45


46 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Ilsetupsperimentale IlprototipoèstatoposizionatonelcanalediprovapressoilPolitecnicodiTorino,ormeggiatoalfondodel canaleedèstatoconnessoaisistemidiacquisizioneecontrollo. Figura'9' 'Il'prototipo'in'assetto'di'prova'(vista'laterale)'' Figura'1' 'Il'prototipo'in'assetto'di'prova'(vista'dall alto)'' 46

47 CompactRio, inverteranddc powersupply criomanager MTimanager Ilsistemadiormeggio Figura'11' 'Il'banco'di'controllo'e'acquisizione'' Il sistema di ormeggio deve mantenere in posizione il prototipo senza alterarne la dinamica di funzionamentoacausadelleforzetrasmesse.sièquindioptatoperilsistemarappresentatoinfigura12, nelqualelacatenadiormeggiohaunestremovincolatoaunamassaappoggiatasulfondodelcanale,è collegataalgalleggiante(jumper)equindiraggiungeloscafo.lapresenzadelgalleggianteeillungotratto dicatenachelocongiungealloscafofannosìcheilsistemadiormeggiomostriuncomportamentoelastico nonlineare.talesistemanoninfluiscesulladinamicadelmotodibeccheggiodelloscafoealcontempolo trattieneinprossimitàdallaposizionepresceltalungoilcanale. 47


48 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Figura'12' 'configurazione'del'sistema'di'ormeggio' Misuradelprofilodell onda Ilprofilod ondaèmisuratoattraversodellesondeaultrasuonimostratenellafigura13epostecomeda layoutdelcanalemostratoinfigura8. Figura'13' 'Le'sonde'per'la'misura'del'profilo'd onda' 48

49 2.4.5 Misuradell angoloδ dibeccheggiodelloscafo L angolo δ di beccheggio dello scafo è misurato con il sensore inerziale MTi prodotto da Xsens. Tale sensore grazie ad accelerometri e giroscopi è in grado di misurare posizione e velocità nello spazio del corpoalqualeèvincolato.lecaratteristichedelsensoresonomostrateintabella4. Tabella'4' 'Caratteristiche'del'sensore'MTi' Modello Mti Risoluzioneangolare.5 (3) Ripetibilità.2 Peso Dimensioni 5g 58x58x22mm Figura'14' 'Posizionamento'del'sensore'MTi'sulla'piattaforma'di'base'all interno'dello'scafo' Misuradiangolo,velocitàecoppiaagentisulPTO L angoloelavelocitàdioscillazionedelpendolorelativialloscafosonomisuratiattraversoiltrasduttore resolverintegratonelpto.ilmomentotorcenteagentesulptotεpuòesserestimatotramitelacorrente che circola nel PTO, sebbene tale misura indiretta possa essere soggetta a errore (variabilità durante il funzionamentodellacostantedicoppia). Sièquindioptatoperunsistemadimisuradirettadellacoppiacompostodaunasospensionedellostatore delptoabbinataaunbraccioconcelladicaricocollegataaltelaio.inquestomodonotaladistanzafra l asse della cella di carico e l asse di rotazione del pendolo è possibile misurare la coppia di reazione scaricatadallostatoredelptosulloscafo. 49

50 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Sospensione Celladicarico Figura'15' 'Il'layout'di'misura'della'coppia'del'PTO' A=27mm B=37mm D=M6x1 E=17mm Modelname Range Sensibility UMM 41Kgfs 1mV/V Accuracy,5% 5 Figura'16' 'caratteristiche'della'cella'di'carico' Diseguitosiriportalacaratteristicadicalibrazionedelsistemadimisuradellacoppia.
51 Table'1' 'Calibrazione'del'sistema'di'misura'di'Tε' Torque'set'(Nm)' Load'cell'voltage'(V)' Epsilon'(deg)' Output'torque'(Nm)' 2,42 11,97 2,39 1,5,25 9,44 1,612 1,3 6,31 1,8,5 4,24 3,4,521 4,48,, 4,5 4,72 43,2 4, ,97 45,94 41,17 41,5 41,28 49,28 41, ,56 412,31 42, Static calibration Fitting equation: y = * x Load cell voltage (V) Output torque (Nm) Figura'17' 'Curva'di'calibrazione'del'sistema'di'misura'della'coppia' 51


52 ACCORDO&DI&PROGRAMMA&MSE-ENEA& IlsistemadicontrollodelPTO LaleggedicontrollodelPTOèunodeiparametrichepermettonodivariarelacoppiascambiatatraPTOe pendolooscillante,variandocosìl assorbimentodipotenzadapartedelsistema. InquesteproveilPTOèstatoregolatoinmododacomportarsicomeunsistemamollasmorzatore,con costantedielasticitàkecoefficientedismorzamentoc. = " + La legge di controllo è implementata tramite il sistema National Instruments CompactRIO. Il crio è un controllore con intelligenza a bordo e con moduli di I/O per interfacciarsi al sistema da controllare. Nel nostrocasoilcrioesegueleseguentioperazioni: 1. LetturadiposizioneevelocitàdaldriverdelPTO 2. Letturadelsegnaleanalogicoprovenientedallacelladicarico 3. ValutazionedellaleggedicontrolloeinviodelvaloredicoppiadesiderataaldriverdelPTO IldriverdicontrollodelPTOèunservosistemadicontrollocoppiacheapartiredaunsetfornitodicoppia lo impone sull asse del PTO. Tale driver fornisce in uscita le grandezze posizione e velocità del PTO e comunicaconilcriotramiteprotocolloseriale. Figura'18' 'Il'driver'del'PTO'a'sinistra'e'il'sistema'NI'CompactRIO'a'destra' 52
53 2.4.8 Metodologiadiesecuzionedelleprove Leprovesonostatesvolteconlaseguenteprocedura. 1. AvviodelsistemadiacquisizionedelmotodelloscafoMTi 2. Avviodelsistemadiacquisizionedelprofilod onda 3. AvviodelsistemadicontrollodelPTO(CompactRio) 4. Avviodelbattitoreegenerazionedell onda 5. Tempodiprovadi12s 6. Spegnimentodelbattitore 7. SpegnimentodelsistemadicontrollodelPTO(CompactRio) 8. Spegnimentodelsistemadiacquisizionedelprofilod onda 9. SpegnimentodelsistemadiacquisizionedelmotodelloscafoMTi 1. Attesadicirca1minutiperlastabilizzazionedelcanale IsistemidiacquisizionediMTi,ondeePTOsonosincronizzatitramitesegnaleditriggerinviatodalsistema CompactRio. Le prove sono state eseguite mantenendo costante l altezza dell onda generata; ne è stato variato il periodo,alfinedivalutareleprestazionidelsistemaperdiversefrequenzediondaregolarincidente. I parametridiprovasonoriportatiintabella5,mentreiparametridiconfigurazionedelprototiposono riportatiintabella6. Tabella'5' 'Onde'di'prova' Parametro' Valore' Altezzad ondapicco4picco(m),5 Periodod onda(s) Tabella'6' 'Impostazioni'del'prototipo' Parametro PTO Lunghezzapendolo Massaoscillante Massaprototipo CostantedielasticitàdelPTO(k) CoefficientedismorzamentodelPTO(c) Valore Configurazionen 1.334m 3kg 75kg Nm/rad Nms/rad Sonostateesaminatetuttelepossibilicombinazionifraperiodid ondaecoefficientidismorzamento. 2.5 Risultati&delle&prove& Ogniprovaacquisitaduranteitestèstataanalizzatapervalutareleperformancesdelsistema. Neidiagrammiriportatiinfigura18sonomostratigliandamentitemporalidellegrandezzedelPTOperla provaconperiodod onda1.3secoefficientedismorzamentodelptoparia.5nms/rad. Sipossonocosìvederegliandamentidi: 4 () =rotazionerelativapendolo4scafo 4 ()=velocitàangolarerelativapendolo4scafo 4 " =coppiaagentesull assedelgeneratore 53
54 ACCORDO&DI&PROGRAMMA&MSE-ENEA& 4 " =potenzaassorbitadalgeneratore 4 () =angolodibeccheggioscafo 2 15 epsilon (deg) 1-1 epsilon dot (rpm) time (s) time (s) T PTO (Nm) P PTO (W) time (s) time (s) Figura'19' 'Grandezze'misurate'al'PTO'(T'='1.3's,'c'='.5'Nms/rad)' delta (deg) time (s) Figura'2' 'Angolo'di'beccheggio'δ'dello'scafo'(T'='1.3's,'c'='.5'Nms/rad)' 54
55 Lefigureseguentimostranolasintesidelleproveeseguitepressoilcanalediprova. sqrt(2) * ε rms (deg) c=.1 c=.3 c=.5 c=.75 c=1 sqrt(2) * δ rms (deg) Wave period - T (s) Wave period - T (s) 1.5 sqrt(2) * ε rms (rad/s) dot Mean power set (W) sqrt(2) * torque set rms (Nm) Without pads Wave period - T (s) Wave period - T (s).6.5 Figura'21' 'Ampiezze'di'picco'nelle'diverse'condizioni'di'prova'delle'coordinate'ε'e'δ'(posizione'e'velocità)' c=.1 c=.3 c=.5 c=.75 c=1 Saturation Without pads Wave period - T (s) Mean power feedback (W) sqrt(2) * δ dot rms (rad/s) Mean power set (W) sqrt(2) * torque feedback rms (Nm) Figura'22' 'Andamento'di'coppia'e'potenza'sul'PTO' sqrt(2) * torque set rms (Nm) Without pads Wave period - T (s) Wave period - T (s) Without pads pads Wave period - T - T (s) (s) c=.1 c=.3 c=.5 c=.75 c=1 Saturation Without pads Wave period - T (s) 55 Mean power feedback (W) sqrt(2) * torque feedback rms (Nm)
56 ACCORDO&DI&PROGRAMMA&MSE-ENEA& RCW = power set/power input c=.1 c=.3 c=.5 c=.75 c=1 Figura'23' 'Andamento'Relative'Capture'Width' LaRelativeCaptureWidthèilrapportofralapotenzauscentedalPTOelapotenzaondosainingresso.La potenzaondosainingressoèilprodottofraladensitàdipotenzap w (W/m)elalarghezzadelloscafoW (m). Sipossonoestrapolareleseguenticonsiderazioni: Wave period - T (s) " = " 1. All aumentare del coefficiente di smorzamento diminuisce l ampiezza di oscillazione ε (e di conseguenza la velocità relativa ) ma incrementa la coppia sul PTO. Questo determina un equilibrio per il quale la potenza si massimizza per un determinato coefficiente di smorzamento variabileperogniperiodod onda.ogniondahaquindiuncoefficientedismorzamentoottimale permassimizzarel assorbimentodipotenza. 2. LaRelativeCaptureWidthsiattestaavalorisuperiorial3%pervaloridiperiodod ondasuperiori a1s,finoaraggiungereilmassimodi45.5%perperiodod ondadi1.3s.questotestimoniale buonecapacitàdiassorbimentodelsistema,capacediconvertire unaquotarilevantedienergia dell onda & 56
57 2.6 Validazione&del&modello&analitico& IllayoutdelmodelloanaliticodelpendolosviluppatoinambienteMatlabSimulinkèriportatoinfigura23 Figura'24' 'Implementazione'Matlab4Simulink'della'dinamica'del'prototipo' Talemodellosimulaladinamicadell interosistemaapartiredallecaratteristichedell ondainingresso. Nellefigureseguentièmostratoilconfrontodell outputdelmodelloconirisultatisperimentali. sqrt(2) * ε rms (deg) o- Experimental, - -o- - Numerical c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad sqrt(2) * δ rms (deg) o- Experimental, - -o- - Numerical Wave period - T (s) Wave period - T (s) 5 -o- Experimental, - -o- - Numerical 1 -o- Experimental, - -o- - Numerical sqrt(2) * ε dot rms (rad/s) sqrt(2) * δ dot rms (rad/s) Wave period - T (s) Wave period - T (s) Figura'25' 'Andamento''delle'coordinate'ε'e'δ,'posizione'e'velocità'(confronto'numerico4sperimentale)' 57
58 ACCORDO&DI&PROGRAMMA&MSE-ENEA& Mean power set (W) o- Experimental, - -o- - Numerical Wave period - T (s) sqrt(2) * torque set rms (Nm) Figura'26' 'Andamento'di'coppia'e'potenza'sul'PTO'(confronto'numerico4sperimentale)' o- Experimental, - -o- - Numerical c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad Wave period - T (s) sqrt(2) * torque feedback rms (Nm) RCW = power set/power input c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad -o- Experimental, - -o- - Numerical Dalconfrontosievinceche: Figura'27' 'Andamento'Relative'Capture'Width'(confronto'numerico4sperimentale)' 1..8 Ilmodellosovrastimaidatisperimentali,angolodibeccheggioδ eangolodirotazionerelativa ε,.6 specialmenteinprossimitàdellecondizionidirisonanzadelsistema(periodod onda s).4 2. Simanifestanoerroririlevantinelcasodellapotenzanettaestratta Il modello implementato in ambiente Matlab4Simulink Wave period utilizza - T (s) le equazioni di Cummins per descrivere l idrodinamica dello scafo. Tale modellazione non tiene conto delle interazioni viscose del fluido con lo scafoequindièportatoasovrastimarneilcampodimoto.siattuaquindiunacorrezioneviscosabasandosi sui risultati sperimentali. Il coefficiente viscoso introduce un comportamento dissipativo del sistema e quindipermettedisintonizzareilmodellosuirisultatisperimentali. Siaggiungenelleequazioniidrodinamichetrecoefficientichedefinisconoleazioniviscosesulloscafoper ognigradodilibertà. RCW = power feedback/power input Wave period - T (s) " " " -o- Experimental, - -o- - Numerical = 58
59 Essendo l angolo di beccheggio δ l unica grandezza di scafo misurata sperimentalmente si decide di applicarealmodellolacorrezionesolamentesutalecoordinataimponendoµ x =µ z =.Sieseguequindi unaproceduradifittingaminimiquadratisull interosetupdiprovesperimentali,inmododaminimizzare l erroredelmodellosullastimadellapotenzaprodotta.ilvaloreidentificatoperµ δèparia5.1nms/rad. Tale correzione, utilizzata per ripetere il confronto modello4sperimentale su tutte le condizioni di prova, portaamiglioraresensibilmenteirisultatiditaleconfronto. sqrt(2) * ε rms (deg) o- Experimental, - -o- - Numerical c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad sqrt(2) * δ rms (deg) o- Experimental, - -o- - Numerical Wave period - T (s) Wave period - T (s) 3 -o- Experimental, - -o- - Numerical 1 -o- Experimental, - -o- - Numerical sqrt(2) * ε dot rms (rad/s) Wave period - T (s) Mean power set (W) Wave period - T (s) Figura'28' 'Andamento''delle'coordinate'ε'e'δ,'posizione'e'velocità'(confronto'numerico4sperimentale,' correzione'viscosa)' sqrt(2) * δ dot rms (rad/s) o- Experimental, - -o- - Numerical Wave period - T (s) Mean power feedback (W) Mean power set (W) o- Experimental, - -o- - Numerical Wave period - T (s) Figura'29' 'Andamento'di'coppia'e'potenza'sul'PTO'(confronto'numerico4sperimentale,'correzione'viscosa)' -o- Experimental, - -o- - Numerical c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad sqrt(2) * torque set rms (Nm) Wave period - T (s) sqrt(2) * torque feedback rms (Nm) o- Experimental, - -o- - Numerical c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad sqrt(2) * torque feedback rms (Nm)
60 ACCORDO&DI&PROGRAMMA&MSE-ENEA& RCW = power set/power input c=.1 Nms/rad c=.3 Nms/rad c=.5 Nms/rad c=.75 Nms/rad c=1 Nms/rad Wave period - T (s) Figura'3' 'Andamento'Relative'Capture'Width'(confronto'numerico4sperimentale,'correzione'viscosa)' -o- Experimental, - -o- - Numerical 6
61 3 Conclusioni Nelpresentelavorosièmostratal attivitàdisperimentazionesulprototipodisistemadiconversionedi energiadamotoondosoamassaoscillante.intalesistemaleondeprovocanol oscillazionedelloscafoche latrasmettealpendolocontenutointernamente.ilmotorelativoscafo4pendoloattivaungeneratoreche produceenergiaelettrica. Il prototipo in scala realizzato in collaborazione con ENEA è stato provato sperimentalmente presso il canalediprovadelpolitecnicoditorino.itestsonostatieffettuaticonondaregolareinunintervallodi periodi compreso fra.9 e 1.4 s, in modo da avere una risposta del sistema per le diverse frequenze dell ondaincidente.inoltreilparametrosmorzantedellaleggedicontrollodelgeneratoreèstatovariato peridentificarelemassimepotenzeestraibiliaogniperiodod onda. Irisultatidellacampagnaditestsonostaticonfrontaticonunmodellonumericodelsistemacheapartire dall ondainingressosimulaladinamicadelsistemaelapotenzaprodotta.talemodelloabbinatoauna proceduradisintonizzazionehaprodottounabuonaconcordanzaconidatisperimentali. Ulteriorivalutazionidellacapacitàdiconversioneenergeticadelprototipononchéaffinamentialmodello possono essere svolti estendendo la campagna di prova ad altre condizioni ondose, differenti leggi i controllodelptoeconfigurazionidelsistemaoscillante. Unapossibilemodificaall attualelayoutdiprovariguardalamessaapuntodiunsistemadicontrollodel prototipo wireless (telemetria) per evitare l influenza dei cavi di segnale e di potenza sulla dinamica del sistema.inoltrelosvolgimentodelleproveinunbacinoconmaggioreprofonditàdell acquagarantirebbela riduzionedelleinterazionidelsistemaconilfondale. L espansione della campagna di prova abbinata agli adattamenti del prototipo permetterebbero una maggiorevalidazionedelmodelloinognicondizionedifunzionamento.ilmodellopotràcosìessereusato perunastimadellecapacitàdelsistemareale.inoltre,nell otticadiprocedereallarealizzazionedelsistema inscalareale,ilmodellovalidatopuòessereusatoancheperlaprogettazionediprototipiascalamaggiore seguendolaroadmappropostadalprogettoequimar. 61
62 ACCORDO&DI&PROGRAMMA&MSE-ENEA& 4 Riferimentibibliografici [1]&Giovanni&Rinaldi,&Approcci&fisico-matematici&per&lo&sviluppo&di&dispositivi&inerziali&per&la&produzione&di& energia&dal&moto&ondoso,&rapporto&tecnico&enea&(in&preparazione)& [2]& Simone& Drocco,& Analisi& dinamica& di& un& sistema& per& la& produzione& di& energia& da& moto& ondoso& con& architettura&a&pendolo,&tesi&di&laurea&politecnico&di&torino& [3]&&Giovanni&Bracco&et&al.,&A&Pendulum&based&Wave&Energy&System,&atti&del&convegno& Energia&dal&mare& & Le&nuove&tecnologie&per&i&mari&italiani,&ENEA&1&e&2&luglio&214& & [4]&Stefano&Roveda,&EXPERIMENTAL&ANALYSIS&OF&A&PENDULUM&BASED&INERTIAL&SEA&WAVES&CONVERTER& Bachelor&Thesis,&Politecnico&di&Torino,&214.& [5]& Perez,& Tristan,& and& Thor& I.& Fossen.& "A& matlab& toolbox& for& parametric& identification& of& radiation-force& models&of&ships&and&offshore&structures."&(29):&1-15.& [6]&Fossen,&Thor&I.,&and&Øyvind&N.&Smogeli.&"Nonlinear&time-domain&strip&theory&formulation&for&low-speed& manoeuvering&and&station-keeping."&modeling,&identification&and&control&25.4&(24):& & [7]& EquiMar& Deliverable& 3.3& Assessment& of& current& practice& for& tank& testing& of& small& marine& energy& devices,&accessed&september&214,& 62
Parte A: Attività sperimentali sul dispositivo PEWEC in scala 1:12
 Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Parte A: Attività sperimentali sul dispositivo PEWEC in scala 1:12 G. Mattiazzo,
Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Parte A: Attività sperimentali sul dispositivo PEWEC in scala 1:12 G. Mattiazzo,
Progettazione e costruzione del sistema meccanico di conversione in scala 1:45. G. Mattiazzo, E. Giorcelli, G. Bracco, E. Giovannini, A.
 ACCORDO DI PROGRAMMA M SE- ENEA Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Progettazione e costruzione del sistema meccanico
ACCORDO DI PROGRAMMA M SE- ENEA Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Progettazione e costruzione del sistema meccanico
Attività sperimentale ENEA sull energia dal mare
 Attività sperimentale ENEA sull energia dal mare Alfredo Fontanella - ENEA Il futuro delle rinnovabili: stato della ricerca e nuove applicazioni Rimini, 8 novembre 2016 ARGOMENTI - Specificità della produzione
Attività sperimentale ENEA sull energia dal mare Alfredo Fontanella - ENEA Il futuro delle rinnovabili: stato della ricerca e nuove applicazioni Rimini, 8 novembre 2016 ARGOMENTI - Specificità della produzione
Progettazione e costruzione del sistema di conversione in scala intermedia
 Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Progettazione e costruzione del sistema di conversione in scala intermedia G.
Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Progettazione e costruzione del sistema di conversione in scala intermedia G.
esperienze in laboratorio
 esperienze in laboratorio 1 piano inclinato misura del coefficiente di attrito statico 2 molle e bilance 3 pendolo semplice 1 misura del coefficiente d attrito statico Un corpo poggiato su un piano inclinato
esperienze in laboratorio 1 piano inclinato misura del coefficiente di attrito statico 2 molle e bilance 3 pendolo semplice 1 misura del coefficiente d attrito statico Un corpo poggiato su un piano inclinato
MECCANICA APPLICATA. Esercizi di ALLE MACCHINE I POLITECNICO DI BARI. PhD Student: Ing. Ilario De Vincenzo
 POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
POLITECNICO DI BARI CORSO DI LAUREA TRIENNALE IN INGEGNERIA MECCANICA Esercizi di MECCANICA APPLICATA ALLE MACCHINE I PhD Student: Ing. Ilario De Vincenzo Numero assegnato X = POLITECNICO DI BARI Esame
U N I V E R S I T A D E G L I S T U D I D E L L A B A S I L I C A T A Esame di MECCANICA APPLICATA ALLE MACCHINE 13/03/2013 RISPOSTE
 U N I V E R S I T A D E G L I S T U D I D E L L A B A S I L I C A T A Esame di MECCANICA APPLICATA ALLE MACCHINE 13/03/013 Cognome: Nome: matr.: MAM 6 CFU MAM 9 CFU RISPOSTE Quesito 1 Quesito Quesito 3
U N I V E R S I T A D E G L I S T U D I D E L L A B A S I L I C A T A Esame di MECCANICA APPLICATA ALLE MACCHINE 13/03/013 Cognome: Nome: matr.: MAM 6 CFU MAM 9 CFU RISPOSTE Quesito 1 Quesito Quesito 3
OSCILLAZIONI SMORZATE E FORZATE
 OSCILLAZIONI SMORZATE E FORZATE Questo esperimento permette di studiare le oscillazioni armoniche di un pendolo e le oscillazioni smorzate e smorzate-forzate. Studiando il variare dell ampiezza dell oscillazione
OSCILLAZIONI SMORZATE E FORZATE Questo esperimento permette di studiare le oscillazioni armoniche di un pendolo e le oscillazioni smorzate e smorzate-forzate. Studiando il variare dell ampiezza dell oscillazione
Dinamica del punto ESERCIZI. Dott.ssa Elisabetta Bissaldi
 Dinamica del punto ESERCIZI Dott.ssa Elisabetta Bissaldi Elisabetta Bissaldi (Politecnico di Bari) A.A. 2018-2019 2 Si consideri un corpo di massa m posto alla base di un piano inclinato di un angolo θ,
Dinamica del punto ESERCIZI Dott.ssa Elisabetta Bissaldi Elisabetta Bissaldi (Politecnico di Bari) A.A. 2018-2019 2 Si consideri un corpo di massa m posto alla base di un piano inclinato di un angolo θ,
Progettazione di un banco Hardware in the Loop per sistemi PTO
 Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Progettazione di un banco Hardware in the Loop per sistemi PTO G. Bracco, E.
Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Progettazione di un banco Hardware in the Loop per sistemi PTO G. Bracco, E.
UNIVERSITA' DEGLI STUDI DI GENOVA - Polo di La Spezia FISICA GENERALE 1 - Prova parziale di meccanica del 10/02/2015
 FISICA GENERALE 1 - Prova parziale di meccanica del 10/02/2015 Lo studente descriva brevemente il procedimento usato e inserisca i valori numerici solo dopo aver risolto il problema con calcoli simbolici,
FISICA GENERALE 1 - Prova parziale di meccanica del 10/02/2015 Lo studente descriva brevemente il procedimento usato e inserisca i valori numerici solo dopo aver risolto il problema con calcoli simbolici,
Rotazioni. Debora Botturi ALTAIR. Debora Botturi. Laboratorio di Sistemi e Segnali
 Rotazioni ALTAIR http://metropolis.sci.univr.it Argomenti Propietá di base della rotazione Argomenti Argomenti Propietá di base della rotazione Leggi base del moto Inerzia, molle, smorzatori, leve ed ingranaggi
Rotazioni ALTAIR http://metropolis.sci.univr.it Argomenti Propietá di base della rotazione Argomenti Argomenti Propietá di base della rotazione Leggi base del moto Inerzia, molle, smorzatori, leve ed ingranaggi
RELAZIO E FI ALE PER IL PROGRAMMA SHORT TERM MOBILITY
 RELAZIO E FI ALE PER IL PROGRAMMA SHORT TERM MOBILITY Proponente e fruitore: Giovanni Caruso In questa relazione si presenta il lavoro svolto presso l LCPC di Parigi nell ambito del programma Short Term
RELAZIO E FI ALE PER IL PROGRAMMA SHORT TERM MOBILITY Proponente e fruitore: Giovanni Caruso In questa relazione si presenta il lavoro svolto presso l LCPC di Parigi nell ambito del programma Short Term
Programma Didattico Fisica e laboratorio A.S. 2016/2017-1D-1E-1F-1G PROGRAMMA DIDATTICO. Disciplina FISICA e LABORATORIO a.s.
 A.S. 2016/2017-1D-1E-1F-1G Pag. 1 di 4 Disciplina FISICA e LABORATORIO a.s. 2016/2017 Classi: 1D - 1E - 1F - 1G Docenti : Prof. Enrico Porru - Prof. ssa Stefania Carnì A.S. 2016/2017-1D-1E-1F-1G Pag. 2
A.S. 2016/2017-1D-1E-1F-1G Pag. 1 di 4 Disciplina FISICA e LABORATORIO a.s. 2016/2017 Classi: 1D - 1E - 1F - 1G Docenti : Prof. Enrico Porru - Prof. ssa Stefania Carnì A.S. 2016/2017-1D-1E-1F-1G Pag. 2
RICHIAMI DELLA FISICA DI BASE. 2) I temi fondamentali della fisica classica e della fisica moderna.
 I temi fondamentali della fisica classica e della fisica moderna.") PROGRAMMA di FISICA CLASSE 3^ A 3^F AS 2017-18 ARTICOLAZIONE DEI CONTENUTI: Al fine del raggiungimento degli obiettivi cognitivi sono stati scelti i seguenti argomenti: RICHIAMI DELLA FISICA DI BASE 1)
PROGRAMMA di FISICA CLASSE 3^ A 3^F AS 2017-18 ARTICOLAZIONE DEI CONTENUTI: Al fine del raggiungimento degli obiettivi cognitivi sono stati scelti i seguenti argomenti: RICHIAMI DELLA FISICA DI BASE 1)
Lezione 18. Trasmissione e carico. F. Previdi - Controlli Automatici - Lez. 18
 Lezione 8. Trasmissione e carico F. Previdi - Controlli Automatici - Lez. 8 . Introduzione Tra motore e carico viene di norma inserito un riduttore per adattare le velocità di rotazione e la coppia erogata
Lezione 8. Trasmissione e carico F. Previdi - Controlli Automatici - Lez. 8 . Introduzione Tra motore e carico viene di norma inserito un riduttore per adattare le velocità di rotazione e la coppia erogata
Richiami sulle oscillazioni smorzate
 Richiami sulle oscillazioni smorzate Il moto armonico è il moto descritto da un oscillatore armonico, cioè un sistema meccanico che, quando perturbato dalla sua posizione di equilibrio, è soggetto ad una
Richiami sulle oscillazioni smorzate Il moto armonico è il moto descritto da un oscillatore armonico, cioè un sistema meccanico che, quando perturbato dalla sua posizione di equilibrio, è soggetto ad una
Teoria dei Sistemi
 Teoria dei Sistemi 13-06-2016 Esercizio 1 In Figura sono riportati un sottomarino telecomandato da remoto (ROV) ed il suo modello nel piano di pitch (beccheggio). Il sistema ha massa M e momento di inerzia
Teoria dei Sistemi 13-06-2016 Esercizio 1 In Figura sono riportati un sottomarino telecomandato da remoto (ROV) ed il suo modello nel piano di pitch (beccheggio). Il sistema ha massa M e momento di inerzia
Prova Parziale 2 Su un piano inclinato con un angolo θ = 60 rispetto all orizzontale è posto un blocco di peso P = 1.0 N. La forza di contatto F che i
 Su un piano inclinato con un angolo θ = 60 rispetto all orizzontale è posto un blocco di peso P = 1.0 N. La forza di contatto F che il piano esercita sul blocco vale in modulo: F = 9.8 N F = 0.5 N F =
Su un piano inclinato con un angolo θ = 60 rispetto all orizzontale è posto un blocco di peso P = 1.0 N. La forza di contatto F che il piano esercita sul blocco vale in modulo: F = 9.8 N F = 0.5 N F =
LICEO CLASSICO VITTORIO EMANUELE II
 LICEO CLASSICO VITTORIO EMANUELE II Via San Sebastiano, 51 NAPOLI Classe 2 Liceo Sezione C P r o f. s s a D a n i e l a S o l P r o g r a m m a d i F i s i c a s v o l t o n e l l a. s. 2 0 1 5 / 2 0 1
LICEO CLASSICO VITTORIO EMANUELE II Via San Sebastiano, 51 NAPOLI Classe 2 Liceo Sezione C P r o f. s s a D a n i e l a S o l P r o g r a m m a d i F i s i c a s v o l t o n e l l a. s. 2 0 1 5 / 2 0 1
LICEO DELLE SCIENZE UMANE G. Pascoli, Bolzano Anno scolastico Classe IA Prof.ssa Adina Balmus MATEMATICA PROGRAMMA SVOLTO
 Classe IA 1. Numeri naturali e numeri interi L insieme N. Le operazioni in N. Potenze ed espressioni in N. Multipli e divisori. M.C.D. e m.c.m. L insieme Z. Il valore assoluto. Le operazioni in Z. Potenze
Classe IA 1. Numeri naturali e numeri interi L insieme N. Le operazioni in N. Potenze ed espressioni in N. Multipli e divisori. M.C.D. e m.c.m. L insieme Z. Il valore assoluto. Le operazioni in Z. Potenze
Laboratorio di Fisica I A.A. 2018/ /12/2018
 Laboratorio di Fisica I A.A. 2018/2019 13/12/2018 Esperienza N.3 Misura del periodo di oscillazione e della costante elastica della molla di un oscillatore armonico semplice Gruppo n.2 Bozzotta Riccardo
Laboratorio di Fisica I A.A. 2018/2019 13/12/2018 Esperienza N.3 Misura del periodo di oscillazione e della costante elastica della molla di un oscillatore armonico semplice Gruppo n.2 Bozzotta Riccardo
15000 A 3000 rpm TIPO - Type
 SERVOMOTORI C.C. SERIE Series ESA DATI MOTORE - MOTOR RATINGS 2S COPPIA - Nm 0.32 TIPO DI AVVOLGIMENTO Type of winding 1 2 VELOCITA NOMINALE - Rated speed n [ rpm ] 3000 3000 COPPIA ROTORE BLOCCATO - Continuos
SERVOMOTORI C.C. SERIE Series ESA DATI MOTORE - MOTOR RATINGS 2S COPPIA - Nm 0.32 TIPO DI AVVOLGIMENTO Type of winding 1 2 VELOCITA NOMINALE - Rated speed n [ rpm ] 3000 3000 COPPIA ROTORE BLOCCATO - Continuos
UNIVERSITÀ DEL SALENTO
 UNIVERSITÀ DEL SALENTO FACOLTÀ DI SCIENZE MMFFNN Corso di Laurea in Fisica CORSO DI LABORATORIO I MISURA DEL PERIODO DI OSCILLAZIONE DI UN PENDOLO SEMPLICE E STIMA DEL VALORE DI g Scopo dell esperienza
UNIVERSITÀ DEL SALENTO FACOLTÀ DI SCIENZE MMFFNN Corso di Laurea in Fisica CORSO DI LABORATORIO I MISURA DEL PERIODO DI OSCILLAZIONE DI UN PENDOLO SEMPLICE E STIMA DEL VALORE DI g Scopo dell esperienza
MATERIA Meccanica & Macchine
 MATERIA Meccanica & Macchine CLASSE 3^ ITIS DOCENTE Annamaria Pantisano UF N 1: CINEMATICA 20 ORE UF N 2 : STATICA 15 ORE UF N 3 : DINAMICA 20 ORE UF N 4 RESISTENZE PASSIVE 09 ORE UF N 6 ENERGIA MECCANICA
MATERIA Meccanica & Macchine CLASSE 3^ ITIS DOCENTE Annamaria Pantisano UF N 1: CINEMATICA 20 ORE UF N 2 : STATICA 15 ORE UF N 3 : DINAMICA 20 ORE UF N 4 RESISTENZE PASSIVE 09 ORE UF N 6 ENERGIA MECCANICA
Compito di Fisica Generale (Meccanica) 10/01/2012
 10/01/2012") Compito di Fisica Generale (Meccanica) 10/01/2012 1) In un piano orizzontale sono assegnati due assi cartesiani x e y. Uno strato di liquido occupa lo spazio fra y = 0 ed y = d e si muove a velocità costante
Compito di Fisica Generale (Meccanica) 10/01/2012 1) In un piano orizzontale sono assegnati due assi cartesiani x e y. Uno strato di liquido occupa lo spazio fra y = 0 ed y = d e si muove a velocità costante
Nota: per la risoluzione si mostrino chiaramente i diagrammi delle forze per il blocchetto e per la lastra
 FISICA GENERALE I - Sede di Spezia - Prova A di Meccanica del 15/02/2016 ME 1 Un blocchetto di massa =5.0 è appoggiato sopra una di massa =10 e tra e blocchetto vi è attrito con coefficiente statico =0.90
FISICA GENERALE I - Sede di Spezia - Prova A di Meccanica del 15/02/2016 ME 1 Un blocchetto di massa =5.0 è appoggiato sopra una di massa =10 e tra e blocchetto vi è attrito con coefficiente statico =0.90
ISTITUTO STATALE DI ISTRUZIONE SUPERIORE VITTORIO FOSSOMBRONI Via Sicilia, GROSSETO CLASSE: I
 ISTITUTO STATALE DI ISTRUZIONE SUPERIORE VITTORIO FOSSOMBRONI Via Sicilia, 45 58100 GROSSETO A. S. 2015/2016 PROGRAMMA CON CONTENUTI MINIMI PER GLI STUDENTI CON SOPENSIONE DI GIUDIZIO MATERIA : FISICA
ISTITUTO STATALE DI ISTRUZIONE SUPERIORE VITTORIO FOSSOMBRONI Via Sicilia, 45 58100 GROSSETO A. S. 2015/2016 PROGRAMMA CON CONTENUTI MINIMI PER GLI STUDENTI CON SOPENSIONE DI GIUDIZIO MATERIA : FISICA
MODULI DI FISICA (SECONDO BIENNIO)
") DIPARTIMENTO SCIENTIFICO Asse* Matematico Scientifico - tecnologico Triennio MODULI DI FISICA (SECONDO BIENNIO) SUPERVISORE DI AREA Prof. FRANCESCO SCANDURRA MODULO N. 1 FISICA Scientifico - tecnologico
DIPARTIMENTO SCIENTIFICO Asse* Matematico Scientifico - tecnologico Triennio MODULI DI FISICA (SECONDO BIENNIO) SUPERVISORE DI AREA Prof. FRANCESCO SCANDURRA MODULO N. 1 FISICA Scientifico - tecnologico
CONTROLLI STRADALI E AEROPORTUALI. Prove di tipo prestazionale
 SIIV 4 CORSO DI ALTA FORMAZIONE E RICERCA Le pavimentazioni stradali flessibili 11-15 settembre 2006 CONTROLLI STRADALI E AEROPORTUALI Prove di tipo prestazionale Massimo Losa Università di Pisa Dipartimento
SIIV 4 CORSO DI ALTA FORMAZIONE E RICERCA Le pavimentazioni stradali flessibili 11-15 settembre 2006 CONTROLLI STRADALI E AEROPORTUALI Prove di tipo prestazionale Massimo Losa Università di Pisa Dipartimento
INDICE GRANDEZZE FISICHE
 INDICE CAPITOLO 1 GRANDEZZE FISICHE Compendio 1 1-1 Introduzione 2 1-2 Il metodo scientifico 2 1-3 Leggi della Fisica e Principi 4 1-4 I modelli in Fisica 7 1-5 Grandezze fisiche e loro misurazione 8 1-6
INDICE CAPITOLO 1 GRANDEZZE FISICHE Compendio 1 1-1 Introduzione 2 1-2 Il metodo scientifico 2 1-3 Leggi della Fisica e Principi 4 1-4 I modelli in Fisica 7 1-5 Grandezze fisiche e loro misurazione 8 1-6
Compito di Fisica Generale (Meccanica) 25/01/2011
 25/01/2011") Compito di Fisica Generale (Meccanica) 25/01/2011 1) Un punto materiale di massa m è vincolato a muoversi su di una guida orizzontale. Il punto è attaccato ad una molla di costante elastica k. La guida
Compito di Fisica Generale (Meccanica) 25/01/2011 1) Un punto materiale di massa m è vincolato a muoversi su di una guida orizzontale. Il punto è attaccato ad una molla di costante elastica k. La guida
Indice. Grandezze fisiche Introduzione Misura e unità di misura Equazioni dimensionali... 15
 Indice Grandezze fisiche... 11 1.1 Introduzione... 11 1.2 Misura e unità di misura... 13 1.3 Equazioni dimensionali... 15 Elementi di calcolo vettoriale... 17 2.1 Introduzione... 17 2.2 Vettore e sue rappresentazioni...
Indice Grandezze fisiche... 11 1.1 Introduzione... 11 1.2 Misura e unità di misura... 13 1.3 Equazioni dimensionali... 15 Elementi di calcolo vettoriale... 17 2.1 Introduzione... 17 2.2 Vettore e sue rappresentazioni...
Meccanica 17 giugno 2013
 Meccanica 17 giugno 2013 Problema 1 (1 punto) Un punto si muove nel piano y-x con legge oraria: Con x,y misurati in metri, t in secondi. a) Determinare i valori di y quando x=1 m; b) Determinare il modulo
Meccanica 17 giugno 2013 Problema 1 (1 punto) Un punto si muove nel piano y-x con legge oraria: Con x,y misurati in metri, t in secondi. a) Determinare i valori di y quando x=1 m; b) Determinare il modulo
Fondamenti di Meccanica Esame del
 Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Corso di laurea in Informatica 1 Compitino di Fisica COMPITO B 26 Aprile Corsi A e B (docenti: Colò, Maugeri)
") Firma Corso di laurea in Informatica 1 Compitino di Fisica COMPITO B 26 Aprile 2007 Corsi A e B (docenti: Colò, Maugeri) Cognome: Nome: Matricola: Pos: 1) Si consideri il sistema rappresentato in figura
Firma Corso di laurea in Informatica 1 Compitino di Fisica COMPITO B 26 Aprile 2007 Corsi A e B (docenti: Colò, Maugeri) Cognome: Nome: Matricola: Pos: 1) Si consideri il sistema rappresentato in figura
STUDIO E OTTIMIZZAZIONE DI UN SISTEMA DI SMORZAMENTO PASSIVO PER L ALBERO MOTORE DI UN DIESEL AUTOMOBILISTICO
 STUDIO E OTTIMIZZAZIONE DI UN SISTEMA DI SMORZAMENTO PASSIVO PER L ALBERO MOTORE DI UN DIESEL AUTOMOBILISTICO Tesi di Laurea di: Francesco Curci Relatore: Prof. Ing. Luca Piancastelli Correlatori: Prof.
STUDIO E OTTIMIZZAZIONE DI UN SISTEMA DI SMORZAMENTO PASSIVO PER L ALBERO MOTORE DI UN DIESEL AUTOMOBILISTICO Tesi di Laurea di: Francesco Curci Relatore: Prof. Ing. Luca Piancastelli Correlatori: Prof.
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA. OBIETTIVI U. D. n 1.2: La rappresentazione di dati e fenomeni
 FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
FISICA E LABORATORIO INDIRIZZO C.A.T. CLASSE PRIMA Le competenze di base a conclusione dell obbligo di istruzione sono le seguenti: Osservare, descrivere ed analizzare fenomeni appartenenti alla realtà
Meccanica 15Aprile 2016
 Meccanica 15Aprile 2016 Problema 1 (1 punto) Una pallottola di massa m= 20 g arriva con velocità V= 300 m/s, inclinata verso il basso di un anglo = 15 rispetto al piano orizzontale, su un blocco di massa
Meccanica 15Aprile 2016 Problema 1 (1 punto) Una pallottola di massa m= 20 g arriva con velocità V= 300 m/s, inclinata verso il basso di un anglo = 15 rispetto al piano orizzontale, su un blocco di massa
Esonero del corso di fisica per la laurea in Conservazione e Restauro dei Beni Culturali. 1 Aprile 2009
 Esonero del corso di fisica per la laurea in Conservazione e Restauro dei Beni Culturali Fila A Cognome 1 Aprile 2009 Nome 1) Scrivere in formato decimale i seguenti numeri (esempio: 10 3 = 1000). 458,3
Esonero del corso di fisica per la laurea in Conservazione e Restauro dei Beni Culturali Fila A Cognome 1 Aprile 2009 Nome 1) Scrivere in formato decimale i seguenti numeri (esempio: 10 3 = 1000). 458,3
LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale
 LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093024 email: crossi@deis.unibo.it Procedura di sintesi Guida alla sintesi del controllo
LABORATORIO DI AUTOMAZIONE Progetto 1 Registratore digitale Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093024 email: crossi@deis.unibo.it Procedura di sintesi Guida alla sintesi del controllo
Prova TIPO D per: ESERCIZIO 1.
 Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Prova TIPO D per: Esame di FONDAMENTI DI AUTOMATICA (9 crediti): 6 dei 10 esercizi numerici (nell effettiva prova d esame verranno selezionati a priori dal docente) domande a risposta multipla (v. ultime
Esame di Fisica con Laboratorio Corso di Laurea in Scienze dell Architettura Università degli Studi di Udine 29 gennaio 2010 Mario Paolo Giordani
 Esame di Fisica con Laboratorio Corso di Laurea in Scienze dell Architettura Università degli Studi di Udine 29 gennaio 2010 Mario Paolo Giordani Soluzioni Teoria Enunciare sinteticamente chiarendo il
Esame di Fisica con Laboratorio Corso di Laurea in Scienze dell Architettura Università degli Studi di Udine 29 gennaio 2010 Mario Paolo Giordani Soluzioni Teoria Enunciare sinteticamente chiarendo il
TOGETHER IS BETTER. MACCHINA A MOTORE LINEARE PER TEST A FATICA mod. LM10. Prestazioni Dinamiche
 MACCHINA A MOTORE LINEARE PER TEST A FATICA mod. LM10 Prestazioni Dinamiche semiampiezza / mm 100 10 1 0,1 1 10 100 Frequenza /Hz TOGETHER IS BETTER ITALSIGMA S.r.l. - Via Masetti, 50-47122 Forlì (FC)
MACCHINA A MOTORE LINEARE PER TEST A FATICA mod. LM10 Prestazioni Dinamiche semiampiezza / mm 100 10 1 0,1 1 10 100 Frequenza /Hz TOGETHER IS BETTER ITALSIGMA S.r.l. - Via Masetti, 50-47122 Forlì (FC)
Una girobussola per Marte Relazione
 Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Una girobussola per Marte Relazione Introduzione La girobussola è un dispositivo in grado di fornire l'indicazione dell assetto longitudinale e laterale di un veicolo di esplorazione come ad esempio un
Competenze Abilità Conoscenze
 CLASSI: TERZE fondamentali della disciplina acquisendo consapevolmente il suo valore culturale, la sua epistemologica. fenomeni. strumenti matematici del suo percorso didattico. * Avere consapevolezza
CLASSI: TERZE fondamentali della disciplina acquisendo consapevolmente il suo valore culturale, la sua epistemologica. fenomeni. strumenti matematici del suo percorso didattico. * Avere consapevolezza
Introduzione all Automatica. Automatica ROMA TRE Stefano Panzieri- 1
 Introduzione all Automatica Automatica ROMA TRE Stefano Panzieri- 1 Descrivere un sistema fisico La mia moto è un sistema? Capire il suo comportamento Cosa é l Automatica Quanti Km faccio con un litro?
Introduzione all Automatica Automatica ROMA TRE Stefano Panzieri- 1 Descrivere un sistema fisico La mia moto è un sistema? Capire il suo comportamento Cosa é l Automatica Quanti Km faccio con un litro?
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile
 Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2017-2018 A. Ponno (aggiornato al 20 dicembre 2017) 2 Ottobre 2017 2/10/17 Benvenuto, presentazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2017-2018 A. Ponno (aggiornato al 20 dicembre 2017) 2 Ottobre 2017 2/10/17 Benvenuto, presentazione
D2S. DATI MOTORE Motor ratings. Cat.gen.ed.SEP12.rev.A. SERIE Series. Symbols UNITÀ SIMBOLI. Units. COPPIA Torque Nm 0.6
 DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units D2S COPPIA Torque Nm 0.6 TIPO DI AVVOLGIMENTO Winding type - - 40 04 30 05 30 11 VELOCITÀ NOMINALE Rated speed n RPM 4000 3000 3000 COPPIA A ROTORE
DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units D2S COPPIA Torque Nm 0.6 TIPO DI AVVOLGIMENTO Winding type - - 40 04 30 05 30 11 VELOCITÀ NOMINALE Rated speed n RPM 4000 3000 3000 COPPIA A ROTORE
Università dell Aquila - Ingegneria Prova Scritta di Fisica Generale I - 03/07/2015 Nome Cognome N. Matricola CFU
 Università dell Aquila - Ingegneria Prova Scritta di Fisica Generale I - 03/07/2015 Nome Cognome N. Matricola CFU............ Tempo a disposizione (tre esercizi) 2 ore e 30 1 esercizio (esonero) 1 ora
Università dell Aquila - Ingegneria Prova Scritta di Fisica Generale I - 03/07/2015 Nome Cognome N. Matricola CFU............ Tempo a disposizione (tre esercizi) 2 ore e 30 1 esercizio (esonero) 1 ora
Compito di Fisica Generale (Meccanica) 13/01/2014
 13/01/2014") Compito di Fisica Generale (Meccanica) 13/01/2014 1) Un punto materiale inizialmente in moto rettilineo uniforme è soggetto alla sola forza di Coriolis. Supponendo che il punto si trovi inizialmente nella
Compito di Fisica Generale (Meccanica) 13/01/2014 1) Un punto materiale inizialmente in moto rettilineo uniforme è soggetto alla sola forza di Coriolis. Supponendo che il punto si trovi inizialmente nella
APPENDICE. Dati. Per l'analisi delle velocità dei veicoli si assumono i seguenti dati: Caratteristiche dei veicoli:
 APPENDICE Di seguito si riporta il computo delle velocità dei due veicoli al momento dell'urto, utilizzando le leggi del moto e la conservazione della quantità di moto. Il calcolo è stato svolto utilizzando
APPENDICE Di seguito si riporta il computo delle velocità dei due veicoli al momento dell'urto, utilizzando le leggi del moto e la conservazione della quantità di moto. Il calcolo è stato svolto utilizzando
Indice. Prefazione. Esercizi svolti 56
 Prefazione XI 1 Introduzione 1 1.1 La modellazione di un sistema meccanico 2 1.2 Analisi e sintesi di un sistema meccanico 2 1.3 Contenuti e organizzazione del testo 3 2 Cinematica del punto e del corpo
Prefazione XI 1 Introduzione 1 1.1 La modellazione di un sistema meccanico 2 1.2 Analisi e sintesi di un sistema meccanico 2 1.3 Contenuti e organizzazione del testo 3 2 Cinematica del punto e del corpo
VII ESERCITAZIONE. Soluzione
 VII ESERCITAZIONE 1. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria. Calcoliamo
VII ESERCITAZIONE 1. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria. Calcoliamo
Poichési conserva l energia meccanica, il lavoro compiuto dal motore è pari alla energia potenziale accumulata all equilibrio:
 Meccanica 24 Aprile 2018 Problema 1 (1 punto) Un blocco di mass M=90 kg è attaccato tramite una molla di costante elastiìca K= 2 10 3 N/m, massa trascurabile e lunghezza a riposo nulla, a una fune inestensibile
Meccanica 24 Aprile 2018 Problema 1 (1 punto) Un blocco di mass M=90 kg è attaccato tramite una molla di costante elastiìca K= 2 10 3 N/m, massa trascurabile e lunghezza a riposo nulla, a una fune inestensibile
VII ESERCITAZIONE - 29 Novembre 2013
 VII ESERCITAZIONE - 9 Novembre 013 I. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria.
VII ESERCITAZIONE - 9 Novembre 013 I. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria.
Il Pendolo. Alessio Bianchi 3 maggio 2017
 Il Pendolo Alessio Bianchi 3 maggio 2017 Sommario Verifica dell isocronia di un pendolo con moti di ampiezza A diversi e determinazione delle loro leggi orarie. Verifica grafica della relazione tra x(t)
Il Pendolo Alessio Bianchi 3 maggio 2017 Sommario Verifica dell isocronia di un pendolo con moti di ampiezza A diversi e determinazione delle loro leggi orarie. Verifica grafica della relazione tra x(t)
Metodologia progettuale di un sistema di produzione di energia da moto ondoso
 Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Metodologia progettuale di un sistema di produzione di energia da moto ondoso
Agenzia nazionale per le nuove tecnologie, l energia e lo sviluppo economico sostenibile MINISTERO DELLO SVILUPPO ECONOMICO Metodologia progettuale di un sistema di produzione di energia da moto ondoso
G3-GNRAC Quartiere Fieristico di Ferrara, 19 Settembre 2014
 G3-GNRAC Quartiere Fieristico di MODELLAZIONE FISICA E NUMERICA DI UN CANALE DI RIP Università degli Studi di Napoli Federico II Alessandro Capobianco Le rip current o correnti di ritorno Le rip current
G3-GNRAC Quartiere Fieristico di MODELLAZIONE FISICA E NUMERICA DI UN CANALE DI RIP Università degli Studi di Napoli Federico II Alessandro Capobianco Le rip current o correnti di ritorno Le rip current
Indice 3. Note di utilizzo 9. Ringraziamenti 10. Introduzione 11
 Indice Indice 3 Note di utilizzo 9 Ringraziamenti 10 Introduzione 11 Capitolo 1 Grandezze fisiche e schematizzazione dei sistemi materiali 13 1.1 Grandezze fisiche ed operazione di misura 13 1.2 Riferimento
Indice Indice 3 Note di utilizzo 9 Ringraziamenti 10 Introduzione 11 Capitolo 1 Grandezze fisiche e schematizzazione dei sistemi materiali 13 1.1 Grandezze fisiche ed operazione di misura 13 1.2 Riferimento
Conoscenze FISICA LES CLASSE TERZA SAPERI MINIMI
 FISICA LES SAPERI MINIMI CLASSE TERZA LE GRANDEZZE FISICHE E LA LORO MISURA Nuovi principi per indagare la natura. Il concetto di grandezza fisica. Misurare una grandezza fisica. L impossibilità di ottenere
FISICA LES SAPERI MINIMI CLASSE TERZA LE GRANDEZZE FISICHE E LA LORO MISURA Nuovi principi per indagare la natura. Il concetto di grandezza fisica. Misurare una grandezza fisica. L impossibilità di ottenere
UNIVERSITÀ DEL SALENTO
 UNIVERSITÀ DEL SALENTO FACOLTÀ DI SCIENZE MMFFNN Corso di Laurea in Fisica CORSO DI LABORATORIO I MISURA DELLA COSTANTE ELASTICA DI UNA MOLLA E VERIFICA DELLA LEGGE DI HOOKE Scopo dell esperienza Misura
UNIVERSITÀ DEL SALENTO FACOLTÀ DI SCIENZE MMFFNN Corso di Laurea in Fisica CORSO DI LABORATORIO I MISURA DELLA COSTANTE ELASTICA DI UNA MOLLA E VERIFICA DELLA LEGGE DI HOOKE Scopo dell esperienza Misura
PROGRAMMA di FISICA CLASSE 3^ D 3^G AS ARTICOLAZIONE DEI CONTENUTI:
 PROGRAMMA di FISICA CLASSE 3^ D 3^G AS 2016-17 ARTICOLAZIONE DEI CONTENUTI: Al fine del raggiungimento degli obiettivi cognitivi sono stati scelti i seguenti argomenti: RICHIAMI DELLA FISICA DI BASE 1)
PROGRAMMA di FISICA CLASSE 3^ D 3^G AS 2016-17 ARTICOLAZIONE DEI CONTENUTI: Al fine del raggiungimento degli obiettivi cognitivi sono stati scelti i seguenti argomenti: RICHIAMI DELLA FISICA DI BASE 1)
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile
 Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2016-2017 A. Ponno (aggiornato al 11 gennaio 2017) 2 Ottobre 2016 3/10/16 Benvenuto, presentazione
Programma dettagliato del corso di MECCANICA RAZIONALE Corso di Laurea in Ingegneria Civile Anno Accademico 2016-2017 A. Ponno (aggiornato al 11 gennaio 2017) 2 Ottobre 2016 3/10/16 Benvenuto, presentazione
Sensori Introduzione. Ingegneria e Tecnologie dei Sistemi di Controllo. Sommario. Parte 1. Parte 2 TRASDUTTORI, SENSORI ED ATTUATORI
 Ingegneria e Tecnologie dei Sistemi di Controllo Sensori Introduzione Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail: atilli@deis.unibo.it Revisionato: 27/9/24 Parte 1 Trasduttori,
Ingegneria e Tecnologie dei Sistemi di Controllo Sensori Introduzione Ing. Andrea Tilli DEIS Alma Mater Studiorum Università di Bologna E-Mail: atilli@deis.unibo.it Revisionato: 27/9/24 Parte 1 Trasduttori,
Teoria dei Sistemi
 Teoria dei Sistemi 25-07-206 In Figura è riportato il modello di un dispositivo rootico per l interazione con amienti virtuali. Si desidera infatti controllare una massa virtuale ( slave ) per mezzo di
Teoria dei Sistemi 25-07-206 In Figura è riportato il modello di un dispositivo rootico per l interazione con amienti virtuali. Si desidera infatti controllare una massa virtuale ( slave ) per mezzo di
Corso di Costruzioni in Zona Sismica
 Corso di Costruzioni in Zona Sismica Università degli Studi di Cassino e del Lazio Meridionale Ernesto Grande e.grande@unicas.it +39.0776.299.3478 Earthquake Engineering Lecture 5 Sistema a un GdL: vibrazioni
Corso di Costruzioni in Zona Sismica Università degli Studi di Cassino e del Lazio Meridionale Ernesto Grande e.grande@unicas.it +39.0776.299.3478 Earthquake Engineering Lecture 5 Sistema a un GdL: vibrazioni
PIANO di LAVORO A. S. 2013/ 2014
 Nome docente Vessecchia Laura Materia insegnata Fisica Classe Prima E ITIS Previsione numero ore di insegnamento ore complessive di insegnamento 3 ore settimanali di cui in compresenza 1 ora di cui di
Nome docente Vessecchia Laura Materia insegnata Fisica Classe Prima E ITIS Previsione numero ore di insegnamento ore complessive di insegnamento 3 ore settimanali di cui in compresenza 1 ora di cui di
Prova scritta del corso di Fisica con soluzioni
 Prova scritta del corso di Fisica con soluzioni Prof. F. Ricci-Tersenghi 30/06/204 Quesiti. Due corpi di massa m = kg e m 2 = 2 kg sono appesi, fermi, ad una molla. Ad un certo istante il corpo di massa
Prova scritta del corso di Fisica con soluzioni Prof. F. Ricci-Tersenghi 30/06/204 Quesiti. Due corpi di massa m = kg e m 2 = 2 kg sono appesi, fermi, ad una molla. Ad un certo istante il corpo di massa
DATI MECCANICI. Mechanical data DATI ELETTRICI. Winding data. Pag. 23
 DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units R3S COPPIA ALLA VELOCITÀ NOMINALE Torque at rated speed VELOCITÀ NOMINALE Rated speed POTENZA NOMINALE Reated output TENSIONE NOMINALE Rated Voltage
DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units R3S COPPIA ALLA VELOCITÀ NOMINALE Torque at rated speed VELOCITÀ NOMINALE Rated speed POTENZA NOMINALE Reated output TENSIONE NOMINALE Rated Voltage
[a= 1.54 m/s 2 ; T 12 =17.5 N, T 23 = 10.5 N]
![[a= 1.54 m/s 2 ; T 12 =17.5 N, T 23 = 10.5 N]](/thumbs/93/112514912.jpg "[a= 1.54 m/s 2 ; T 12 =17.5 N, T 23 = 10.5 N]") Esercizio 1 Tre blocchi di massa rispettivamente m1=5 kg, m2= 2 kg ed m3=3 kg sono uniti da funi e poggiano su un piano orizzontale. Il coefficiente di attrito dinamico fra il piano e i blocchi è µ=0.2.
Esercizio 1 Tre blocchi di massa rispettivamente m1=5 kg, m2= 2 kg ed m3=3 kg sono uniti da funi e poggiano su un piano orizzontale. Il coefficiente di attrito dinamico fra il piano e i blocchi è µ=0.2.
SERIE AUTOVENTILATA ESTERNA External self-ventilated Series DATI MECCANICI. Mechanical data DATI ELETTRICI. Winding data. Pag. 31
 DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units AUTOVENTILATA ESTERNA External self-ventilated R6S COPPIA ALLA VELOCITÀ NOMINALE Torque at rated speed VELOCITÀ NOMINALE Rated speed POTENZA NOMINALE
DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units AUTOVENTILATA ESTERNA External self-ventilated R6S COPPIA ALLA VELOCITÀ NOMINALE Torque at rated speed VELOCITÀ NOMINALE Rated speed POTENZA NOMINALE
Esercizi. =μ S. [ v 2 > gr h > 7.5m ]
![Esercizi. =μ S. [ v 2 > gr h > 7.5m ]](/thumbs/92/110649968.jpg "Esercizi. =μ S. [ v 2 > gr h > 7.5m ]") Una molla ideale di costante k=400 N/m è inizialmente compressa di 10 cm. Al suo estremo libero è appoggiato un corpo di 1 kg e il tutto su un piano orizzontale scabro, con coefficiente di attrito μ D
Una molla ideale di costante k=400 N/m è inizialmente compressa di 10 cm. Al suo estremo libero è appoggiato un corpo di 1 kg e il tutto su un piano orizzontale scabro, con coefficiente di attrito μ D
STUDIO DI MASSIMA DI UN RICOGNITORE MONOUSO PER LA PROTEZIONE CIVILE
 STUDIO DI MASSIMA DI UN RICOGNITORE MONOUSO PER LA PROTEZIONE CIVILE Candidato Segio Petroncini Relatore Chiar.mo Prof. Ing. Luca Piancastelli Obiettivo Si vuole effettuare lo studio di un aeromodello
STUDIO DI MASSIMA DI UN RICOGNITORE MONOUSO PER LA PROTEZIONE CIVILE Candidato Segio Petroncini Relatore Chiar.mo Prof. Ing. Luca Piancastelli Obiettivo Si vuole effettuare lo studio di un aeromodello
Come recuperare energia dalle vibrazioni: energy harvesting piezoelettrico
 Come recuperare energia dalle vibrazioni: energy harvesting piezoelettrico D. Desideri, A. Doria, F. Moro Dipartimento di Ingegneria Industriale Università di Padova LEDS L Energia degli Studenti aula
Come recuperare energia dalle vibrazioni: energy harvesting piezoelettrico D. Desideri, A. Doria, F. Moro Dipartimento di Ingegneria Industriale Università di Padova LEDS L Energia degli Studenti aula
Compito di Meccanica del 16 settembre 2010
 COMPITO A Meccanica (4 ore): problemi 1,3,4 Per i corsi da 5 crediti: Meccanica Classica (3 ore): problemi 1 e 2 - Meccanica dei sistemi (3 ore): problemi 3 e 4 Problema 1: Su una piattaforma circolare
COMPITO A Meccanica (4 ore): problemi 1,3,4 Per i corsi da 5 crediti: Meccanica Classica (3 ore): problemi 1 e 2 - Meccanica dei sistemi (3 ore): problemi 3 e 4 Problema 1: Su una piattaforma circolare
SERIE AUTOVENTILATA ESTERNA External self-ventilated Series DATI MECCANICI. Mechanical data DATI ELETTRICI. Winding data. Pag. 12
 DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units AUTOVENTILATA ESTERNA External self-ventilated Q7S COPPIA ALLA VELOCITÀ NOMINALE Torque at rated speed VELOCITÀ NOMINALE Rated speed POTENZA NOMINALE
DATI MOTORE Motor ratings SIMBOLI Symbols UNITÀ Units AUTOVENTILATA ESTERNA External self-ventilated Q7S COPPIA ALLA VELOCITÀ NOMINALE Torque at rated speed VELOCITÀ NOMINALE Rated speed POTENZA NOMINALE
Dinamica del punto materiale parte seconda
 Dinamica del punto materiale parte seconda a.a. 2017-2018 Testo di riferimento: Elementi di Fisica, Mazzoldi, Nigro, Voci Dinamica del punto materiale parte seconda a.a. 2017-2018 Testo di riferimento:
Dinamica del punto materiale parte seconda a.a. 2017-2018 Testo di riferimento: Elementi di Fisica, Mazzoldi, Nigro, Voci Dinamica del punto materiale parte seconda a.a. 2017-2018 Testo di riferimento:
Lezione 7.1. Introduzione al filtro di Kalman. F. Previdi - Controlli Automatici - Lez. 7.1
 Lezione 7.1 Introduzione al filtro di Kalman 1 Schema della lezione 1. Filtraggio in senso stretto ed in senso lato 2. Introduzione alla teoria di Kalman Esempio 1 : controllo di portata in un dosatore
Lezione 7.1 Introduzione al filtro di Kalman 1 Schema della lezione 1. Filtraggio in senso stretto ed in senso lato 2. Introduzione alla teoria di Kalman Esempio 1 : controllo di portata in un dosatore
Fisica Generale per Ing. Gestionale e Civile (Prof. F. Forti) A.A. 2010/2011 Prova in itinere del 4/3/2011.
 A.A. 2010/2011 Prova in itinere del 4/3/2011.") Cognome Nome Numero di matricola Fisica Generale per Ing. Gestionale e Civile (Prof. F. Forti) A.A. 00/0 Prova in itinere del 4/3/0. Tempo a disposizione: h30 Modalità di risposta: scrivere la formula
Cognome Nome Numero di matricola Fisica Generale per Ing. Gestionale e Civile (Prof. F. Forti) A.A. 00/0 Prova in itinere del 4/3/0. Tempo a disposizione: h30 Modalità di risposta: scrivere la formula
Elenco delle figure. Elenco delle tabelle
 Indice Elenco delle figure Elenco delle tabelle Prefazione ix xv xvii 1 Introduzione 1 1.1 Vento globale... 1 1.2 Vento locale... 2 1.3 Risposta aerodinamica della struttura... 2 1.4 Risposta meccanica
Indice Elenco delle figure Elenco delle tabelle Prefazione ix xv xvii 1 Introduzione 1 1.1 Vento globale... 1 1.2 Vento locale... 2 1.3 Risposta aerodinamica della struttura... 2 1.4 Risposta meccanica
Moto di un Volano. Marco Colò, Jacopo Nespolo Aprile 2007
 Moto di un Volano Marco Colò, Jacopo Nespolo 23-24 Aprile 2007 1 Scopo L obiettivo di quest esperienza è osservare il moto smorzato di un volano, in particolare verificando sperimentalmente la legge (??)
Moto di un Volano Marco Colò, Jacopo Nespolo 23-24 Aprile 2007 1 Scopo L obiettivo di quest esperienza è osservare il moto smorzato di un volano, in particolare verificando sperimentalmente la legge (??)
M? La forza d attrito coinvolta è quella tra i due blocchi occorre quindi visualizzare la reazione normale al piano di contatto Il diagramma delle
 6.25 (6.29 VI ed) vedi dispense cap3-mazzoldi-dinamica-part2 Dueblocchisonocomeinfiguraconm=16kg, M=88kgeconcoeff. d attrito statico tra i due blocchi pari a = 0.38. La superficie su cui poggia M è priva
6.25 (6.29 VI ed) vedi dispense cap3-mazzoldi-dinamica-part2 Dueblocchisonocomeinfiguraconm=16kg, M=88kgeconcoeff. d attrito statico tra i due blocchi pari a = 0.38. La superficie su cui poggia M è priva
Elementi di Modellistica
 Elementi di Modellistica Obiettivo: Sviluppare un modello matematico di un sistema fisico per il progetto di controllori. Un modello fisico per il controllo deve essere: descrittivo: in grado di catturare
Elementi di Modellistica Obiettivo: Sviluppare un modello matematico di un sistema fisico per il progetto di controllori. Un modello fisico per il controllo deve essere: descrittivo: in grado di catturare
Liceo Scientifico G.Galilei Piano di lavoro annuale a.s. 2016/2017 Classi 1^C - 1^E FISICA Prof.ssa Guerrini Claudia
 Settembre/Novembre Liceo Scientifico G.Galilei Piano di lavoro annuale a.s. 2016/2017 Classi 1^C - 1^E FISICA U.D. 1 LE GRANDEZZE FISICHE La fisica e le leggi della natura. Il metodo sperimentale. Le grandezze
Settembre/Novembre Liceo Scientifico G.Galilei Piano di lavoro annuale a.s. 2016/2017 Classi 1^C - 1^E FISICA U.D. 1 LE GRANDEZZE FISICHE La fisica e le leggi della natura. Il metodo sperimentale. Le grandezze
Carattestiche Statiche e Dinamiche dei Sensori
 L Evoluzione Normativa e la Strumentazione per lo Studio della Qualità dell Aria ARPA Lazio 17/05/2018 Carattestiche Statiche e Dinamiche dei Sensori ing. Roberto Sozzi LA MISURA DELLE VARIABILI DEL PBL
L Evoluzione Normativa e la Strumentazione per lo Studio della Qualità dell Aria ARPA Lazio 17/05/2018 Carattestiche Statiche e Dinamiche dei Sensori ing. Roberto Sozzi LA MISURA DELLE VARIABILI DEL PBL
Esercizio 1 L/3. mg CM Mg. La sommatoria delle forze e dei momenti deve essere uguale a 0 M A. ω è il verso di rotazione con cui studio il sistema
 Esercizio 1 Una trave omogenea di lunghezza L e di massa M è appoggiata in posizione orizzontale su due fulcri lisci posti alle sue estremità. Una massa m è appoggiata sulla trave ad una distanza L/3 da
Esercizio 1 Una trave omogenea di lunghezza L e di massa M è appoggiata in posizione orizzontale su due fulcri lisci posti alle sue estremità. Una massa m è appoggiata sulla trave ad una distanza L/3 da
Elementi di base delle vibrazioni meccaniche
 Elementi di base delle vibrazioni meccaniche Vibrazioni Le vibrazioni sono fenomeni dinamici che ci circondano costantemente. La luce, il suono, il calore sono i fenomeni vibratori a noi più evidenti.
Elementi di base delle vibrazioni meccaniche Vibrazioni Le vibrazioni sono fenomeni dinamici che ci circondano costantemente. La luce, il suono, il calore sono i fenomeni vibratori a noi più evidenti.
L α. α d. 1. calcolare la velocità con cui il corpo raggiunge la sommità del piano [8 punti]
![L α. α d. 1. calcolare la velocità con cui il corpo raggiunge la sommità del piano [8 punti]](/thumbs/103/158585467.jpg "L α. α d. 1. calcolare la velocità con cui il corpo raggiunge la sommità del piano [8 punti]") Problema E1 Una molla di costante elastica 500 Nm 1 e di lunghezza a riposo l 0 10 cm si trova in fondo ad un piano lungo L m, con coefficiente di attrito trascurabile e inclinato di un angolo α 30 o rispetto
Problema E1 Una molla di costante elastica 500 Nm 1 e di lunghezza a riposo l 0 10 cm si trova in fondo ad un piano lungo L m, con coefficiente di attrito trascurabile e inclinato di un angolo α 30 o rispetto
Argomenti del corso Parte I Caratteristiche generali e strumenti terminali
 Argomenti del corso Parte I Caratteristiche generali e strumenti terminali 1. Concetti generali Finalità e applicazioni dello studio dei sistemi di misura Applicazione in vari campi: esempi Concetto di
Argomenti del corso Parte I Caratteristiche generali e strumenti terminali 1. Concetti generali Finalità e applicazioni dello studio dei sistemi di misura Applicazione in vari campi: esempi Concetto di
Esame di Meccanica Razionale. Allievi Ing. MAT Appello del 6 luglio 2007
 Esame di Meccanica Razionale. Allievi Ing. MAT Appello del 6 luglio 2007 y Nel sistema di figura posto in un piano verticale il carrello A scorre con vinco- q, R M lo liscio lungo l asse verticale. Il
Esame di Meccanica Razionale. Allievi Ing. MAT Appello del 6 luglio 2007 y Nel sistema di figura posto in un piano verticale il carrello A scorre con vinco- q, R M lo liscio lungo l asse verticale. Il
ANALISI DINAMICA DI STRUTTURE ISOLATE ALLA BASE
 ANALISI DINAMICA DI STRUTTURE ISOLATE ALLA BASE 1 Negli ultimi trent anni l ingegneria sismica ha compiuto notevoli progressi sviluppando moderne strategie di protezione sismica passiva, quale l Isolamento
ANALISI DINAMICA DI STRUTTURE ISOLATE ALLA BASE 1 Negli ultimi trent anni l ingegneria sismica ha compiuto notevoli progressi sviluppando moderne strategie di protezione sismica passiva, quale l Isolamento
Risoluzione problema 1
 UNIVERSITÀ DEGLI STUDI DI PDOV FCOLTÀ DI INGEGNERI Ing. MeccanicaMat. Pari. 015/016 1 prile 016 Una massa m 1 =.5 kg si muove nel tratto liscio di un piano orizzontale con velocita v 0 = 4m/s. Essa urta
UNIVERSITÀ DEGLI STUDI DI PDOV FCOLTÀ DI INGEGNERI Ing. MeccanicaMat. Pari. 015/016 1 prile 016 Una massa m 1 =.5 kg si muove nel tratto liscio di un piano orizzontale con velocita v 0 = 4m/s. Essa urta
IDET Srl Via Volta 1/H Novate Milanese
 suite software per la progettazione preliminare, l analisi e l ottimizzazione statica e dinamica di carene idroplane, del tipo a gradino ( step, redan ) - e convenzionale R [Kg] bare hull 500 MR5E dsl
suite software per la progettazione preliminare, l analisi e l ottimizzazione statica e dinamica di carene idroplane, del tipo a gradino ( step, redan ) - e convenzionale R [Kg] bare hull 500 MR5E dsl
DA CONSEGNARE AL COORDINATORE DEL CORSO PER LA PRESENTAZIONE DEL DOTTORANDO AL GIUDIZIO DEL COLLEGIO DEI DOCENTI IN VISTA DELL ESAME FINALE
 SUB. F DA CONSEGNARE AL COORDINATORE DEL CORSO PER LA PRESENTAZIONE DEL DOTTORANDO AL GIUDIZIO DEL COLLEGIO DEI DOCENTI IN VISTA DELL ESAME FINALE SCHEDA INFORMATIVA SULLE ATTIVITA DEL TRIENNIO Cognome
SUB. F DA CONSEGNARE AL COORDINATORE DEL CORSO PER LA PRESENTAZIONE DEL DOTTORANDO AL GIUDIZIO DEL COLLEGIO DEI DOCENTI IN VISTA DELL ESAME FINALE SCHEDA INFORMATIVA SULLE ATTIVITA DEL TRIENNIO Cognome
Controllo di un Braccio Robotico (Pendolo Reale)
") Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
Controllo di un Braccio Robotico (Pendolo Reale) ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy santoro@dmi.unict.it Programmazione
a.s. 2018/2019 Programmazione Didattica Fisica 2AMM 2BMM - 2CMM
 Progettazione Disciplinare a.s. 2018/2019 Programmazione Didattica Fisica 2AMM 2BMM - 2CMM Progettazione Disciplinare Le forze Gli allungamenti elastici Le operazioni sulle forze Le forze di attrito L
Progettazione Disciplinare a.s. 2018/2019 Programmazione Didattica Fisica 2AMM 2BMM - 2CMM Progettazione Disciplinare Le forze Gli allungamenti elastici Le operazioni sulle forze Le forze di attrito L
Buone conoscenze di Matematica elementare (Algebra, Geometria e Trigonometria); Nozioni fondamentali del calcolo differenziale e integrale
; Nozioni fondamentali del calcolo differenziale e integrale") DIPARTIMENTO DI INGEGNERIA ELETTRICA ELETTRONICA E INFORMATICA Corso di laurea in Ingegneria elettronica Anno accademico 2015/2016-1 anno FISICA I E-N FIS/01-9 CFU - 2 semestre Docente titolare dell'insegnamento
DIPARTIMENTO DI INGEGNERIA ELETTRICA ELETTRONICA E INFORMATICA Corso di laurea in Ingegneria elettronica Anno accademico 2015/2016-1 anno FISICA I E-N FIS/01-9 CFU - 2 semestre Docente titolare dell'insegnamento
ISOLATORI A SCORRIMENTO A SUPERFICIE CURVA
 ISOLATORI A SCORRIMENTO A SUPERFICIE CURVA ISOLATORI A SCORRIMENTO A SUPERFICIE CURVA S04 INTRODUZIONE DESCRIZIONE Gli isolatori a scorrimento a superficie curva della serie FIP (Friction Isolation Pendulum)
ISOLATORI A SCORRIMENTO A SUPERFICIE CURVA ISOLATORI A SCORRIMENTO A SUPERFICIE CURVA S04 INTRODUZIONE DESCRIZIONE Gli isolatori a scorrimento a superficie curva della serie FIP (Friction Isolation Pendulum)