Corso di Multimedia A.A 2013/2014
|
|
|
- Marcellina Marra
- 5 anni fa
- Visualizzazioni
Transcript



1 Corso di Multimedia A.A 2013/2014
2 Un immagine è rappresentata da una funzione bidimensionale f(x,y). Il piano XY in cui stanno le coordinate dell immagine è detto DOMINIO SPAZIALE e le variabili x,y sono dette variabili spaziali o coordinate spaziali. Tutte le tecniche di elaborazione dell immagine che illustreremo (edge detection) vengono implementate nel dominio spaziale, che, quindi, altro non è che il piano stesso che contiene i pixel di un immagine; esse, infatti, operano direttamente sui pixel di un immagine.
 sono metodi di elaborazione locale progettati per individuare i pixel della linea.")
3 Una linea può essere vista come un segmento di edge in cui l intensità dello sfondo su entrambi i lati della linea è maggiore o minore dell intensità dei pixel della linea. Gli individuatori di edge (edge detection) sono metodi di elaborazione locale progettati per individuare i pixel della linea. Gli strumenti che permettono di individuare le brusche variazioni locali di intensità sono le derivate prima e seconda. In particolare la derivata prima produce edge spessi, mentre la derivata seconda evidenzia meglio i cambiamenti bruschi e quindi mette in rilievo i dettagli sottili (incluso il rumore).
4 Il gradiente viene utilizzato per definire l'intensità e la direzione di un edge in un certo punto (x,y). Tutto ciò è possibile perché il gradiente è un vettore bidimensionale che ha la proprietà geometrica di puntare nella direzione di massima variazione di f nel punto (x,y). Il gradiente e' definito: La direzione del gradiente è data dall angolo: calcolato rispetto all asse x. La direzione di un edge in un punto qualsiasi (x, y) è ortogonale alla direzione di α(x,y) del vettore gradiente in quel punto.
5 I tre passi fondamentali per individuare gli edge sono: APPLICARE LO SMOOTHING ALL'IMMAGINE PER RIDURRE IL RUMORE PRESENTE INDIVIDUARE I POTENZIALI PUNTI DI EDGE LOCALIZZARE GLI EDGE, CIOÈ SELEZIONARE TRA I PUNTI CANDIDATI QUELLI CHE LO SONO VERAMENTE L individuazione dei bordi è largamente utilizzata quando si vuole dividere l immagine in aree corrispondente a oggetti differenti. Rappresentare un immagine attraverso i suoi bordi permette che la quantità di dati da memorizzare è ridotta significativamente mentre la maggior parte delle informazioni vengono comunque mantenute. L individuazione dei bordi costituisce uno stadio preliminare nell analisi delle immagini.


6 Le tecniche utilizzate per questo scopo sono: Esse sono definite avanzate in quanto tengono conto di fattori come il rumore e la natura degli edge stessi.




7 Marr e Hildreth intuirono che le variazioni di intensità sono dipendenti dalla scala dell'immagine e quindi la loro individuazione richiede l'uso di operatori di dimensioni diverse. un cambiamento di intensità improvviso da origine a un picco o lungo la derivata prima o a uno zero crossing nella derivata seconda. Quindi le caratteristiche principali di un operatore utilizzato per l'individuazione degli edge dovrebbero essere: essere un operatore differenziale capace di calcolare un'approssimazione delle derivate prima e seconda in ogni punto dell'immagine poter essere regolato per agire a ogni scala selezionata, in modo tale che gli operatori più grandi possano essere utilizzati per individuare gli edge sfocati, mentre gli operatori più piccoli per individuare i dettagli più piccoli scarsamente visibili.
.")
8 Marr e Hildreth intuirono che il miglior operatore che rispettasse queste condizioni fosse il filtro 2 G dove: 2 : è l operatore laplaciano G: è la funzione gaussiana 2-D G x 2 y ( x, y) 2 x + y 2 2σ e = 2 2 con deviazione standard σ (a volte detto costante di spazio). Mettendo insieme i due termini si ha come espressione finale: x + y 2 x + y 2σ 2 2σ G( x, y) = e 4 Questa espressione è detta il Laplaciano del Gaussiano ( LoG ) o, per via della sua forma, operatore a sombrero. σ 2 2
: 1.")
9 Mostriamo una maschera 5x5 che ne approssima la forma (nella pratica si utilizzerebbe il negativo di questa maschera). Questa approssimazione non è unica. Il suo scopo è quello di catturare la forma essenziale della funzione LoG. Ci sono due aspetti fondamentali dietro la scelta dell operatore 2 G(x,y): 1. la parte gaussiana dell'operatore sfoca l'immagine, quindi riduce il rumore sia nel dominio spaziale che in quello della frequenza ed è quindi meno probabile che vengano introdotti artefatti non presenti nell'immagine originale. 2. il laplaciano ha il vantaggio di essere isotropico, cioè invariante per rotazione, e quindi ha le caratteristiche del sistema visivo umano e risponde in egual modo alle variazioni di intensità in ogni direzione della maschera, senza quindi la necessità di dover utilizzare maschere multiple per calcolare la risposta più forte.
10 L'algoritmo di Marr-Hildreth può essere riassunto nei seguenti passi: filtrare l immagine di input con un filtro passa basso gaussiano nxn ottenuto dalla funzione gaussiana 2D, cioè: G x + y 2 2σ ( x, y) = e Le dimensioni del filtro discreto LoG nxn dovrebbero essere tali che n sia il più piccolo intero dispari maggiore o uguale a 6σ (l uso di valori più grandi non influisce più di tanto sul risultato finale). 2 2 calcolare il laplaciano dell immagine ottenuta nel passo precedente utilizzando, ad esempio, la seguente maschera 3x3:

11 trovare gli zero crossing dell immagine del passo precedente per determinare le posizioni degli edge. Gli zero crossing sono la caratteristica fondamentale del metodo di individuazione degli edge di Marr-Hildreth. Una conseguenza importante negli utilizzare gli zero crossing per l individuazione degli edge è che gli edge che ne risultano sono spessi 1 pixel. Questa proprietà semplifica i passaggi successivi come ad esempio il collegamento degli edge (edge linking).
12 Un metodo per trovare gli zero crossing in ogni pixel p dell immagine filtrata g(x,y) si basa sull uso di un intorno 3 x 3 centrato in p. Uno zero crossing in p implica la presenza di una delle configurazioni seguenti: Se i valori di g(x,y) vengono confrontati su una linea(un metodo usato comunemente) allora non solo i segni devono essere diversi, ma anche il valore assoluto della loro differenza numerica deve anche superare una data soglia prima di poter dire che p è un pixel di zero crossing.
; X = rgb2gray(i); A = edge(x,'log',t,σ); % gli zero")
; imshow(x); title( originale")
13 I = imread( inserisci-img.jpg'); X = rgb2gray(i); A = edge(x,'log',t,σ); % gli zero crossing utilizzeranno % il metodo dell intorno 3x3 % con soglia t figure; subplot(1,2,1); imshow(x); title( originale ); subplot(1,2,2); imshow(a); title( log );
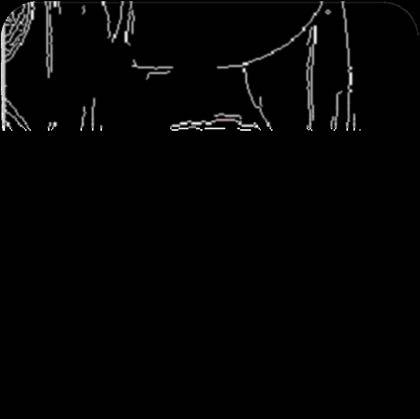
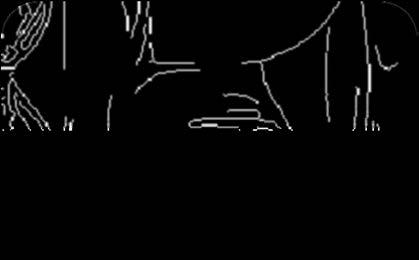
14 la scelta di σ influisce sul tipo di dettaglio evidenziato

15 σ =0.5 t = 0.1 σ =1 t =0.1 σ=2 t =0.1

16 Si noti che, se posto il valore della soglia uguale a 0, tutti gli edge formano dei percorsi chiusi. Questo effetto a spaghetti è un serio inconveniente di questo metodo quando viene utilizzato come valore soglia lo zero. Si possono evitare tali artefatti utilizzando un valore di soglia positivo

17 t=0 σ=0.5 t=0.1 σ=0.5 t=0.5 σ=0.5


18 Una procedura a volte utilizzata, per tenere in conto che le variazioni di intensità sono dipendenti dalla scala, è filtrare un immagine con vari valori di σ. Le mappe di edge di zero crossing che ne risultato vengono poi combinate tenendo solo gli edge che sono comuni a tutte le mappe. Marr e Hildreth notarono che è possibile approssimare il filtro LoG tramite una differenza di gaussiane: con σ p > σ q
19 Questo metodo può fornisce utili informazioni ma a causa della sua complessità è utilizzato solo come strumento di prototipazione per selezionare un appropriato valore di σ da utilizzare con un filtro singolo. Quindi il valore σ per il LoG dovrebbe essere scelto come nell equazione che segue in modo tale che Log e Dog abbiano gli stessi zero crossing: 2 σ 2 2 σ 1 σ 2 2 σ 1 σ 2 σ 1 ln σ 2 = 2 2 2



20 Un approccio analitico è stato invece seguito da John F. Canny nel 1986, che ha studiato in dettaglio il comportamento dell operatore gradiente applicato ad un contorno rumoroso. Il modello di bordo considerato è un fronte ripido monodimensionale b(x) cui è aggiunto rumore Gaussiano bianco.
21 Si assume che l individuazione del bordo sia realizzata tramite una convoluzione con un filtro f(x) avente risposta impulsiva h(x) antisimmetrica e nulla al di fuori di un intervallo [-W,W]. Un bordo è individuato da un massimo locale della convoluzione tra l immagine ed il filtro. Il filtro è scelto sulla base di tre criteri di efficacia definiti da Canny: 1. Buona capacità di individuazione: l operatore ha una bassa probabilità di non individuare un bordo reale (elevata sensibilità falsi negativi) ed una bassa probabilità di individuare falsi bordi (elevata specificità falsi positivi) 2. Buona capacità di localizzazione: i punti evidenziati dall operatore dovrebbero essere quanto più vicini possibile al centro del bordo reale. 3. Unicità della risposta: l operatore dovrebbe fornire una sola risposta in corrispondenza di un bordo reale. Ciò che contraddistingue il lavoro di Canny è la capacità di formalizzare matematicamente i tre criteri citati e poi tentare di derivarne alcune soluzioni ottimali. In pratica è difficile(se non impossibile) trovare una soluzione in forma chiusa che soddisfi tutti i criteri precedenti.
22 L algoritmo di individuazione degli edge di Canny consiste nei seguenti passaggi fondamentali: Sottoporre a smoothing l immagine di input con un filtro gaussiano. Un problema primario negli algoritmi di riconoscimento dei contorni è dato dalla presenza di rumore nelle immagini non processate, per cui è necessario applicare all immagine un filtro spaziale, tramite il processo di convoluzione. Lo scopo è rimuovere le alte frequenze su cui il rumore interferisce in maniera più problematica. Calcolare la magnitudo e l angolo del gradiente. Calcolando il gradiente del risultato e, poi, utilizzando la magnitudo e la direzione del gradiente otteniamo l intensità e la direzione degli edge in ogni punto. M ( x, y) α( x, y) = = tan g 2 x 1 + g g g x y 2 y con g x = f s / x e g y = f s / y.
23 Applicare la non maxima suppression all immagine della magnitudo. Dato che è stata generata utilizzando il gradiente, M(x,y) contiene ampie creste (detti ridges) attorno ai massimi locali. Il passo successivo è l assottigliamento di tali valori facendo uso, ad esempio, del metodo non maxima suppression. La non-maximum suppression si ottiene azzerando i valori dei pixel non considerati parte del contorno, cioè i pixel il cui valore di intensità non è maggiore di quello dei pixel adiacenti situati lungo la direzione data dal valore α in quel punto. Il risultato è un immagine binaria con una linea sottile in corrispondenza dei bordi degli oggetti nell immagine.
24 Utilizzare la doppia soglia e la connettività per individuare e collegare gli edge. 1. Si fissano due soglie T L e T H con T H > T L. 2. Tutti i punti di valore maggiore di T H sono di edge. 3. Tutti i punti di valore compreso fra T H e T L saranno considerati edge solo se è contigui ad un edge Perché la scelta di due soglie? Utilizzando un unica soglia potremmo avere i seguenti problemi: soglia troppo bassa: ci saranno alcuni falsi edge (detti falsi positivi) soglia troppo alta: allora alcuni punti di edge saranno eliminati (falsi negativi). L algoritmo di Canny cerca di migliorare questa situazione utilizzando due soglie (thresholding mediante isteresi), scegliendo una soglia bassa T L e una soglia alta T H.
25 I = imread( inserisci-img.jpg'); X = rgb2gray(i); C= edge(x, canny,[t 1 t 2 ],σ); figure; subplot(1,2,1); imshow(x); title( originale ); subplot(1,2,2); imshow(c); title( canny);


26 Alti valori di σ permettono di trovare edge a scale più grandi Piccoli valori di σ permettono di scovare i dettagli più fini


27 σ = 0.5 σ = 1 σ = 2

28 Processo utilizzato per ridurre i falsi punti di edge. Canny suggerì che il rapporto tra le due soglie dovrebbe essere di circa 2 ( o 3) a 1.



29 t 1 = 0.1 t 2 = 0.2 t 1 = 0.2 t 2 = 0.4 t 1 = 0.01 t 2 = 0.5
30 Insiemi ordinari(crisp)
31 Insiemi ordinari(crisp) giovani non giovani

32 Insiemi ordinari(crisp) giovani non giovani


33 una persona di 20 anni è considerata giovane, ma una persona di 20 anni e un secondo non appartiene all insieme delle persone giovani. Questo problema è tipico degli insiemi crisp e limita l uso della teoria classica degli insiemi in molte applicazioni pratiche. giovani non giovani


34 Quello che occorre è una maggiore flessibilità nel concetto di giovane cioè, una transizione graduale da giovane a non giovane. Ciò può essere fatto creando dei gradi di giovinezza. Possiamo dire in questo modo se una persona è giovane, relativamente giovane, giovane al 50%, non così giovane, e così via. Questo tipo di imprecisioni (FUZZY) sono più in linea con il comportamento degli uomini quando parlano di età in modo indefinito.



35 La teoria degli insiemi fuzzy è stata introdotta da L.A. Zadeh più di 40 anni fa. Come vedremo, gli insiemi fuzzy forniscono un formalismo in grado di trattare informazioni imprecise.
36 Un insieme fuzzy A in Z è caratterizzato da una funzione di appartenenza, µ A (z), che associa a ogni elemento di Z un numero reale nell intervallo [0,1]. Il valore di µ A (z) in z rappresenta il grado di appartenenza di z in A. Più vicino è il valore di µ A (z) all unità, più alto è il grado di appartenenza di z ad A e viceversa quando il valore di µ A (z) si avvicina allo zero. ATTENZIONE al concetto appartiene a : caso insieme ordinari: un elemento appartiene ad un insieme un elemento non appartiene ad un insieme caso insiemi fuzzy: tutti gli elementi z per cui µ A (z) = 1 sono membri a pieno titolo dell insieme tutti gli elementi z per cui 0<µ A (z)<1 appartengono in modo parziale all insieme tutti gli elementi z per cui µ A (z) = 0 non sono membri dell insieme
37 Insiemi fuzzy (1,1) 1 19 (19,1) 21 (21,0.9) 13 (13,1) 80 (80,0) 22 (22,0.8) 20 (20,1) 90 (90,0)
38 Quindi, un insieme fuzzy è una coppia ordinata di valori di z e una funzione di appartenenza corrispondente che assegna un grado di appartenenza a ogni valore di z. In simboli: A = {z, µ A (z) z Z} Definizioni Intersezione : l intersezione (AND) di due insiemi fuzzy A e B, denotata da A AND B, è un insieme fuzzy I con funzione di appartenenza per tutti i valori di z Z.
39 Anche se la logica e la probabilità operano sullo stesso intervallo di valori [0,1] è importante fare la distinzione tra i due concetti. PROBABILITA => c è il 50% di probabilità che una persona sia giovane significa che semplicemente abbiamo il 50% delle probabilità di sapere a quale insieme appartiene. LOGICA FUZZY => il grado di appartenenza di una persona all insieme delle persone giovani è di 0.5, significa che una persona è giovane fino ad un certo grado (0,5) o equivalentemente che questa è una persona giovane media ; non veramente giovane ma non troppo vicina a essere non giovane. In altre parole la logica fuzzy non è affatto probabilistica ed è legata soltanto ai gradi di appartenenza a un insieme.
40 Valori d input FUZZIFICAZIONE Rendere fuzzy gli input scalare -> valore fuzzy VALUTAZIONE IN BASE ALLA REGOLA output fuzzy DEFUZZIFICAZIONE valore fuzzy -> Scalare Valori d output


41 Quando si applicano gli insiemi fuzzy al filtraggio spaziale, l approccio di base è quello di definire le proprietà della regione dell intorno locale che catturi l essenza di quello che ci si aspetta che i filtri individuano. Possiamo sviluppare un algoritmo di estrazione dei contorni su un semplice concetto fuzzy: se un pixel appartiene a una regione uniforme rendilo bianco; altrimenti rendilo nero, dove bianco e nero sono insiemi fuzzy. Definiamo, per ogni regione 3x3, le differenze tra il pixel centrale (chiamato z 5 ) e ognuno dei vicini formando la sub-immagine di dimensioni 3 3, dove d i indica la differenza di intensità tra il vicino i- esimo e il punto centrale (d i = z i - z 5, dove i valori z sono valori di intensità).
42 sottoporre a smoothing l immagine di input con un filtro gaussiano. per ogni pixel dell immagine creare un kernel 3x3 tramite l utilizzo della seguente formula: d i = z i z 5 Si noti che abbiamo usato le differenze di intensità dei 4 vicini e il punto centrale, è possibile tramite un estenzione diretta utilizzare gli 8 vicini. rendere gli input d i fuzzy assegnando il grado di appartenenza all insieme zero. applicare le formule di Fuzzy: R1: SE d 2 è zero AND d 6 è zero, ALLORA z 5 è bianco R2: SE d 6 è zero AND d 8 è zero, ALLORA z 5 è bianco R3: SE d 8 è zero AND d 4 è zero, ALLORA z 5 è bianco R4: SE d 4 è zero AND d 2 è zero, ALLORA z 5 è bianco R5: altrimenti z 5 è nero. calcolando l output dell insieme fuzzy bianco. applicare la defuzzificazione per tornare ai valori in scala di grigio.
; A3 = imfilter(a3,h,'replicate'); F = double(a3); %creo la matrice F che sarà for i=2:size(a3,1)-1 % formata dai")
 = k(n1,n2)-z5; % creo il kernel con le")
43 X = imread( immagine'); %scelgo l'immagine A3 = rgb2gray(x); %la converto a scala di grigio %applico il filtro gaussiano h = fspecial('gaussian',[3 3],sigma); A3 = imfilter(a3,h,'replicate'); F = double(a3); %creo la matrice F che sarà for i=2:size(a3,1)-1 % formata dai gradi di appartenenza for j=2:size(a3,2)-1 % dei pixel all'insieme fuzzy zero z5 = double(a3(i,j)); k = double(a3(i-1:i+1,j-1:j+1)); %creo il kernel temporaneo per la for n1 = 1:3 %creazione delle differenze d'intensità for n2 = 1:3 k(n1,n2) = k(n1,n2)-z5; % creo il kernel con le differenze di intensità end end
44 %Applico la prima regola: SE d2 è zero %AND d6 è zero, ALLORA z5 è bianco x1 = appartzeros(1,2,k); % restituisce il grado di appartenenza del % valore k(i,j) all'insieme fuzzy zero x2 = appartzeros(2,3,k); if (min(x1,x2) > 0) % stabilisco il grado all insieme zero if (x1==1 && x2== 1) % se il valore è 1 allora appartiene a pieno titolo all'insieme c1 = 1; % piena forza else c1 = min(x1,x2); end else c1=0; end %analogamente tramite le altre tre regole ricavo c2,c3 e c4 F(i,j) = assegnagrado(c1,c2,c3,c4); %effettua una media artimetica per calcolare il grado di appartenenza dell'insieme fuzzy zero end end
45 V = F; % creo la matrice con gli output effettivi for i=2:size(a3,1)-1 for j=2:size(a3,2)-1 %calcolo il baricentro n = 1-F(i,j); % il grado di appartenenza al nero b = F(i,j); % il grado di appartenenza al bianco V(i,j) = round((0*n+255*b) / (n+b)); if( V(i,j) < t ) V1(i,j) = 0; else V1(i,j) = 255; end %trasformo l'immagine in binaria end end

46 INPUT OUTPUT


47 INPUT OUTPUT
48 MARR HILDRETH CANNY FUZZY Implementazione Semplice Complessa Semplice Punto forza Utilizzo degli ZC Doppia sogliatura La semplicità Vantaggi Generalmente trovare le posizioni corrette dei bordi Superiore a tutti gli altri approcci: migliore risultati specialmente in condizioni di rumore; miglioramenti significativi nei dettagli degli edge principali; maggiore rigetto delle caratteristiche irrilevanti nei risultati Estremamente semplice, rilevamento di bordi e dei loro orientamenti


49 MARR HILDRETH CANNY FUZZY I risultati dipendono dalla scelta di σ, T dalla scelta di σ, T 1 e T 2 dalla scelta di σ, T Svantaggi Malfunzionamenti agli angoli, nelle curve e dove la funzione dell'intensità livello di grigio varia. Calcoli complessi. Maggiore complessità computazionale Dispensiosa dal punto di vista computazione:il processo di fuzzificazione, gli antecedenti di ogni regola, l implicazione, l aggregazione e la defuzzificazione deve essere applicato a ogni pixel dell immagine.

50
Estrazione dei bordi
 Estrazione dei bordi L algoritmo di Marr-Hildreth L algoritmo di Canny Operatori per l estrazione dei bordi (edge operators) Lo scopo di questi operatori è quello di generare un immagine dei bordi (edge
Estrazione dei bordi L algoritmo di Marr-Hildreth L algoritmo di Canny Operatori per l estrazione dei bordi (edge operators) Lo scopo di questi operatori è quello di generare un immagine dei bordi (edge
ELABORAZIONE DELLE IMMAGINI:
 Università degli Studi di Catania Facoltà di Scienze Matematiche,Fisiche e Naturali Corso di Laurea in Informatica, Secondo Livello ELABORAZIONE DELLE IMMAGINI: EDGE DETECTION Corso di Analisi Numerica
Università degli Studi di Catania Facoltà di Scienze Matematiche,Fisiche e Naturali Corso di Laurea in Informatica, Secondo Livello ELABORAZIONE DELLE IMMAGINI: EDGE DETECTION Corso di Analisi Numerica
Introduzione a Matlab
 Introduzione a Matlab Operazioni di Base & Edge Detection Fondamenti di Visione Artificiale a.a. 25/26 2/5/6 Estrazione dei Contorni Lezione V: indice Filtri e Kernel Line Detection Edge Detection Edge
Introduzione a Matlab Operazioni di Base & Edge Detection Fondamenti di Visione Artificiale a.a. 25/26 2/5/6 Estrazione dei Contorni Lezione V: indice Filtri e Kernel Line Detection Edge Detection Edge
Filtraggio. Stefano Ferrari. Università degli Studi di Milano Tecniche di calcolo e sistemi operativi e informatica
 Filtraggio Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Tecniche di calcolo e sistemi operativi e informatica anno accademico 2017 2018 Filtraggio Il termine filtraggio fa
Filtraggio Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Tecniche di calcolo e sistemi operativi e informatica anno accademico 2017 2018 Filtraggio Il termine filtraggio fa
Corso di Visione Artificiale. Features. Samuel Rota Bulò
 Corso di Visione Artificiale Features Samuel Rota Bulò Features Le features (caratteristiche) sono parti di un'immagine che sono: locali: caratteristica locale di un'immagine, significativi: sono interessanti
Corso di Visione Artificiale Features Samuel Rota Bulò Features Le features (caratteristiche) sono parti di un'immagine che sono: locali: caratteristica locale di un'immagine, significativi: sono interessanti
Low Level Vision: Edge
 Low Level Vision: Edge Prof. Sebastiano Battiato Caratteristiche di immagini In Visione Computazionale il termine feature di immagini si può riferire a due entità possibili: Una proprietà globale di un
Low Level Vision: Edge Prof. Sebastiano Battiato Caratteristiche di immagini In Visione Computazionale il termine feature di immagini si può riferire a due entità possibili: Una proprietà globale di un
Trasformare e migliorare
 Trasformare e migliorare Elaborazione di immagini Da f(x,y) a g(x,y) pixel trasformati secondo un determinato algoritmo f(x,y) g(x,y) Scopi dell elaborazione Eliminazione dei disturbi Esaltazione dei particolari
Trasformare e migliorare Elaborazione di immagini Da f(x,y) a g(x,y) pixel trasformati secondo un determinato algoritmo f(x,y) g(x,y) Scopi dell elaborazione Eliminazione dei disturbi Esaltazione dei particolari
Sharpening mediante filtraggio spaziale
 Sharpening mediante filtraggio spaziale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Sharpening Il termine sharpening
Sharpening mediante filtraggio spaziale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Sharpening Il termine sharpening
Segmentazione di immagini. Multimedia
 Segmentazione di immagini Introduzione La segmentazione è un processo di partizionamento di un immagine in regioni disgiunte e omogenee. Introduzione (def. formale) (1) Sia R l intera regione spaziale
Segmentazione di immagini Introduzione La segmentazione è un processo di partizionamento di un immagine in regioni disgiunte e omogenee. Introduzione (def. formale) (1) Sia R l intera regione spaziale
Esercitazione 4: Filters
 Laboratorio di Immagini Esercitazione 4: Filters Mauro Zucchelli 07/04/2016 AVVISO Settimana prossima lezione sospesa! Riprendiamo dall ultima volta Abbiamo visto cosa rappresenta la trasformata di Fourier
Laboratorio di Immagini Esercitazione 4: Filters Mauro Zucchelli 07/04/2016 AVVISO Settimana prossima lezione sospesa! Riprendiamo dall ultima volta Abbiamo visto cosa rappresenta la trasformata di Fourier
Image Processing 2. Dispense del corso di Elaborazione di Immagini e Audio Digitali. Prof. Roberto Vezzani.
 http://imagelab.ing.unimo.it Dispense del corso di Elaborazione di Immagini e Audio Digitali Image Processing 2 Prof. Roberto Vezzani Relazioni tra pixel Esistono delle relazioni di base tra pixel in un
http://imagelab.ing.unimo.it Dispense del corso di Elaborazione di Immagini e Audio Digitali Image Processing 2 Prof. Roberto Vezzani Relazioni tra pixel Esistono delle relazioni di base tra pixel in un
Elaborazione delle immagini
 Dipartimento di Fisica a.a. 4/5 Fisica Medica Elaborazione delle immagini 5/4/5 Processamento Una mappatura di tipo esponenziale mostra un immagine del tipo Intensità d uscita Intensità in entrata L =
Dipartimento di Fisica a.a. 4/5 Fisica Medica Elaborazione delle immagini 5/4/5 Processamento Una mappatura di tipo esponenziale mostra un immagine del tipo Intensità d uscita Intensità in entrata L =
Elaborazione di immagini. Trasformare e migliorare. Scopi dell elaborazione. Tipi di elaborazione
 Elaborazione di immagini Trasformare e migliorare Procedimento che data un immagine originale f(x,y) ne generi una nuova g(x,y) i cui pixel siano stati trasformati secondo un determinato algoritmo. f(x,y)
Elaborazione di immagini Trasformare e migliorare Procedimento che data un immagine originale f(x,y) ne generi una nuova g(x,y) i cui pixel siano stati trasformati secondo un determinato algoritmo. f(x,y)
Dato un vettore di lunghezza N, questo può essere pensato come un elemento di uno spazio N dimensionale.
 Base canonica Dato un vettore di lunghezza N, questo può essere pensato come un elemento di uno spazio N dimensionale. 234 204 34 16 44 134 12 11 56 Quindi possiamo scomporlo usando la base canonica di
Base canonica Dato un vettore di lunghezza N, questo può essere pensato come un elemento di uno spazio N dimensionale. 234 204 34 16 44 134 12 11 56 Quindi possiamo scomporlo usando la base canonica di
Corso di Visione Artificiale. Texture. Samuel Rota Bulò
 Corso di Visione Artificiale Texture Samuel Rota Bulò Texture Le texture sono facili da riconoscere ma difficili da definire. Texture Il fatto di essere una texture dipende dal livello di scala a cui si
Corso di Visione Artificiale Texture Samuel Rota Bulò Texture Le texture sono facili da riconoscere ma difficili da definire. Texture Il fatto di essere una texture dipende dal livello di scala a cui si
3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI
 3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI ESISTENZA DI UN PUNTO DI OTTIMO VINCOLATO Il problema di ottimizzazione vincolata introdotto nel paragrafo precedente può essere formulato nel modo seguente:
3.3 FORMULAZIONE DEL MODELLO E CONDIZIONI DI ESISTENZA DI UN PUNTO DI OTTIMO VINCOLATO Il problema di ottimizzazione vincolata introdotto nel paragrafo precedente può essere formulato nel modo seguente:
Elaborazione di immagini. I filtri Digital Image Processing
 Elaborazione di immagini I filtri Digital Image Processing Tre livelli di image processing Basso livello Filtro di smoothing Tre livelli di image processing Medio livello Contrast saliency region detection,
Elaborazione di immagini I filtri Digital Image Processing Tre livelli di image processing Basso livello Filtro di smoothing Tre livelli di image processing Medio livello Contrast saliency region detection,
Algoritmi per il riconoscimento dell iride
 Algoritmi per il riconoscimento dell iride 1 L O C A L B I N A R Y P A T T E R N - S C A L E I N V A R I A N T F E A T U R E T R A S F O R M - C U M U L A T I V E S U M S A cura di: Chiara Galdi http://biplab.unisa.it/
Algoritmi per il riconoscimento dell iride 1 L O C A L B I N A R Y P A T T E R N - S C A L E I N V A R I A N T F E A T U R E T R A S F O R M - C U M U L A T I V E S U M S A cura di: Chiara Galdi http://biplab.unisa.it/
Operatori locali. Operatori locali. Q=f(P,w)
") Operatori locali Operatori locali P(i,j) Gli operatori locali associano ad ogni piel ( i,j) della immagine di output Q un valore calcolato in un intorno o finestra w centrata nel piel P(i,j) Q=f(P,w) Operatori
Operatori locali Operatori locali P(i,j) Gli operatori locali associano ad ogni piel ( i,j) della immagine di output Q un valore calcolato in un intorno o finestra w centrata nel piel P(i,j) Q=f(P,w) Operatori
Elaborazione di immagini digitali: trasformare e migliorare
 Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Elaborazione di Immagini e Suoni / Riconoscimento e Visioni Artificiali 12 c.f.u. Anno Accademico 2009/2010 Docente: ing. Salvatore
Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Elaborazione di Immagini e Suoni / Riconoscimento e Visioni Artificiali 12 c.f.u. Anno Accademico 2009/2010 Docente: ing. Salvatore
Elaborazione delle immagini a basso livello
 Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Università degli Studi di Catania. DI SCIENZE MATEMATICHE FISICHE E NATURALI Corso di Laurea Specialistica in Informatica.
 Università degli Studi di Catania FACOLTÀ DI SCIENZE MATEMATICHE FISICHE E NATURALI Corso di Laurea Specialistica in Informatica Computer Vision Segmentazione di Immagini: tecniche di soglia e region growing
Università degli Studi di Catania FACOLTÀ DI SCIENZE MATEMATICHE FISICHE E NATURALI Corso di Laurea Specialistica in Informatica Computer Vision Segmentazione di Immagini: tecniche di soglia e region growing
AL DI LA DELLE IMMAGINI
 AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
Low Level Vision: Trasformata di Hough
 Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
Low Level Vision: Trasformata di Hough
 Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
Low Level Vision: Trasformata di Hough Prof Sebastiano Battiato Rilevamento di linee Le linee sono feature importanti perché permettono di definire analiticamente o approssimare molte forme (in particolare
Operatori locali su immagini digitali
 Operatori locali su immagini digitali Definizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali Definizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Progetto di Computer Vision: Plugin per imagej: Harry Corners Detection. Corso di laurea specialistica in Informatica.
 Messina Mariagrazia Progetto di Computer Vision: Plugin per imagej: Harry Corners Detection Corso di laurea specialistica in Informatica. A.A. 2006-2007 Introduzione Il progetto realizzato consiste nell
Messina Mariagrazia Progetto di Computer Vision: Plugin per imagej: Harry Corners Detection Corso di laurea specialistica in Informatica. A.A. 2006-2007 Introduzione Il progetto realizzato consiste nell
Università degli studi di Catania Facoltà di scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Magistrale
 Università degli studi di Catania Facoltà di scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Magistrale Alessandro Ortis Estensione del software ImageJ con l implementazione di un
Università degli studi di Catania Facoltà di scienze Matematiche, Fisiche e Naturali Corso di Laurea in Informatica Magistrale Alessandro Ortis Estensione del software ImageJ con l implementazione di un
Edge e Segmentazione
 Edge e Segmentazione Stefano Ferrari Università degli Studi di Milano stefanoferrari@unimiit Tecniche di calcolo e sistemi operativi e informatica anno accademico 2017 2018 Segmentazione di immagini Molte
Edge e Segmentazione Stefano Ferrari Università degli Studi di Milano stefanoferrari@unimiit Tecniche di calcolo e sistemi operativi e informatica anno accademico 2017 2018 Segmentazione di immagini Molte
Un modello computazionale per la detezione dei bordi
 Modelli e Principi della Percezione Data: AA 2010-11 Un modello computazionale per la detezione dei bordi Docente: Prof. Giuseppe Boccignone Scriba: 1 Il problema Il problema della modellazione di un processo
Modelli e Principi della Percezione Data: AA 2010-11 Un modello computazionale per la detezione dei bordi Docente: Prof. Giuseppe Boccignone Scriba: 1 Il problema Il problema della modellazione di un processo
Video Analysis (cenni) Annalisa Franco
 Annalisa Franco") 1 Video Analysis (cenni) Annalisa Franco annalisa.franco@unibo.it http://bias.csr.unibo.it/vr/ 2 Visual motion Un video è una sequenza di frame catturati nel corso del tempo Il valori dell immagine sono
1 Video Analysis (cenni) Annalisa Franco annalisa.franco@unibo.it http://bias.csr.unibo.it/vr/ 2 Visual motion Un video è una sequenza di frame catturati nel corso del tempo Il valori dell immagine sono
Filtraggio nel Dominio della Frequenza
 Filtraggio nel Dominio della Frequenza Parte 2 Filtro di enfasi ad alta frequenza Solitamente i filtri passa alto riducono a zero il termine dc, dunque riducono l intensità media nell immagine filtrata
Filtraggio nel Dominio della Frequenza Parte 2 Filtro di enfasi ad alta frequenza Solitamente i filtri passa alto riducono a zero il termine dc, dunque riducono l intensità media nell immagine filtrata
L istogramma. Interazione & Multimedia 2
 Istogramma 1 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione
Istogramma 1 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione
Operazioni sulle immagini. Multimedia
 Operazioni sulle immagini Semplificazione: toni di grigio Per semplificare la trattazione del problema lavoreremo solo su immagini a toni di grigio. Le medesime operazioni descritte per tali immagini si
Operazioni sulle immagini Semplificazione: toni di grigio Per semplificare la trattazione del problema lavoreremo solo su immagini a toni di grigio. Le medesime operazioni descritte per tali immagini si
Tecniche fuzzy per le trasformazioni di intensità e il filtraggio spaziale
 Tecniche fuzzy per le trasformazioni di intensità e il filtraggio spaziale Cenni Storici 1965: Lofti A. Zadeh "Fuzzy Sets" Logica in cui sono presi in considerazione i valori intermedi fra il Vero ed il
Tecniche fuzzy per le trasformazioni di intensità e il filtraggio spaziale Cenni Storici 1965: Lofti A. Zadeh "Fuzzy Sets" Logica in cui sono presi in considerazione i valori intermedi fra il Vero ed il
Immagini binarie. Binarizzazione di immagini a livelli di grigio
 Immagini binarie Binarizzazione di immagini a livelli di grigio Immagini binarie In molti casi gli le scene di interesse conducono ad immagini che possono essere considerate binarie, cioè contenenti nel
Immagini binarie Binarizzazione di immagini a livelli di grigio Immagini binarie In molti casi gli le scene di interesse conducono ad immagini che possono essere considerate binarie, cioè contenenti nel
Matematica. Corso integrato di. per le scienze naturali ed applicate. Materiale integrativo.
 Corso integrato di Matematica per le scienze naturali ed applicate Materiale integrativo http://www.dimi.uniud.it/biomat/ Paolo Baiti 1 Lorenzo Freddi 1 1 Dipartimento di Matematica e Informatica, Università
Corso integrato di Matematica per le scienze naturali ed applicate Materiale integrativo http://www.dimi.uniud.it/biomat/ Paolo Baiti 1 Lorenzo Freddi 1 1 Dipartimento di Matematica e Informatica, Università
Corso di Matematica per la Chimica
 Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Risoluzione di Equazioni Algebriche Le equazioni algebriche sono equazioni del tipo P(x) = 0 dove P è un polinomio di grado n cioé P(x) = a 1 x n + a 2 x n
Dott.ssa Maria Carmela De Bonis a.a. 2013-14 Risoluzione di Equazioni Algebriche Le equazioni algebriche sono equazioni del tipo P(x) = 0 dove P è un polinomio di grado n cioé P(x) = a 1 x n + a 2 x n
26 - Funzioni di più Variabili Limiti e Derivate
 Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 26 - Funzioni di più Variabili Limiti e Derivate Anno Accademico 2013/2014 M.
Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 26 - Funzioni di più Variabili Limiti e Derivate Anno Accademico 2013/2014 M.
Basi matematiche per il Machine Learning
 Basi matematiche per il Machine Learning Corso di AA, anno 2017/18, Padova Fabio Aiolli 04 Ottobre 2017 Fabio Aiolli Basi matematiche per il Machine Learning 04 Ottobre 2017 1 / 14 Probabilità Un esperimento
Basi matematiche per il Machine Learning Corso di AA, anno 2017/18, Padova Fabio Aiolli 04 Ottobre 2017 Fabio Aiolli Basi matematiche per il Machine Learning 04 Ottobre 2017 1 / 14 Probabilità Un esperimento
Image segmentation. Elaborazione intermedia
 Image segmentation Edge detection Elaborazione intermedia elaborazione intermedia si occupa di ottenere una descrizione signiicativa della scena mediante la segmentazione suddivisione della immagine in
Image segmentation Edge detection Elaborazione intermedia elaborazione intermedia si occupa di ottenere una descrizione signiicativa della scena mediante la segmentazione suddivisione della immagine in
Telerilevamento e Modellistica Forestale
 Telerilevamento e Modellistica Forestale Lezione 6 Esplorazione, enfatizzazioni e filtri Dario Papale Contributi: Vern Vanderbilt, TA- Quinn Hart, CCRS Cosa è l enfatizzazione delle immagini L enfatizzazione
Telerilevamento e Modellistica Forestale Lezione 6 Esplorazione, enfatizzazioni e filtri Dario Papale Contributi: Vern Vanderbilt, TA- Quinn Hart, CCRS Cosa è l enfatizzazione delle immagini L enfatizzazione
Un sistema fuzzyper il miglioramento del contrasto
 Un sistema fuzzyper il miglioramento del contrasto G. Castellano 1 Fuzzy Contrast Enhancement(FCE) ContrastEnhancement: miglioramento del contrasto di un'immagine a scale di grigio (trasformazione di intensità)
Un sistema fuzzyper il miglioramento del contrasto G. Castellano 1 Fuzzy Contrast Enhancement(FCE) ContrastEnhancement: miglioramento del contrasto di un'immagine a scale di grigio (trasformazione di intensità)
1 Schemi alle differenze finite per funzioni di una variabile
 Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Operazioni puntuali. Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma
 Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma Analisi di Basso Livello In ingresso abbiamo le immagini provenienti dai sensori. In uscita si hanno un insieme di matrici ognuna delle
Tipi di elaborazioni Operatori puntuali Look Up Table Istogramma Analisi di Basso Livello In ingresso abbiamo le immagini provenienti dai sensori. In uscita si hanno un insieme di matrici ognuna delle
SEGMENTAZIONE DI IMMAGINI. Elaborazione dei Segnali Multimediali Raffaele Gaetano 06 Maggio 2014
 SEGMENTAZIONE DI IMMAGINI Elaborazione dei Segnali Multimediali Raffaele Gaetano 06 Maggio 2014 DEFINIZIONE La segmentazione è un processo di basso livello utile a molte applicazioni basate sull elaborazione
SEGMENTAZIONE DI IMMAGINI Elaborazione dei Segnali Multimediali Raffaele Gaetano 06 Maggio 2014 DEFINIZIONE La segmentazione è un processo di basso livello utile a molte applicazioni basate sull elaborazione
Morfologia Matematica su immagini in scala di grigio
 Morfologia Matematica su immagini in scala di grigio Dilation, erosion, opening, closing Top-Hat, Bottom-Hat Algoritmi Morfologici in scala di grigio Dalle immagini binarie alle immagini in scala di grigio
Morfologia Matematica su immagini in scala di grigio Dilation, erosion, opening, closing Top-Hat, Bottom-Hat Algoritmi Morfologici in scala di grigio Dalle immagini binarie alle immagini in scala di grigio
Matematica. Corso integrato di. per le scienze naturali ed applicate. Materiale integrativo. Paolo Baiti 1 Lorenzo Freddi 1
 Corso integrato di Matematica per le scienze naturali ed applicate Materiale integrativo Paolo Baiti 1 Lorenzo Freddi 1 1 Dipartimento di Matematica e Informatica, Università di Udine, via delle Scienze
Corso integrato di Matematica per le scienze naturali ed applicate Materiale integrativo Paolo Baiti 1 Lorenzo Freddi 1 1 Dipartimento di Matematica e Informatica, Università di Udine, via delle Scienze
Restauro di immagini. Prof. Filippo Stanco. Multimedia
 Restauro di immagini Prof. Filippo Stanco Restauro di immagini Il principale obiettivo delle tecniche di restauro è quello di rendere migliore un immagine cercando di ripristinarne il contenuto informativo
Restauro di immagini Prof. Filippo Stanco Restauro di immagini Il principale obiettivo delle tecniche di restauro è quello di rendere migliore un immagine cercando di ripristinarne il contenuto informativo
Funzioni reali di variabile reale
 Lezione 10.1, Analisi, 03.10.2017 Funzioni reali di variabile reale Funzioni polinomiali Rette nel piano e funzioni polinomiali di I grado Sia fissato un sistema di riferimento cartesiano ortogonale monometrico
Lezione 10.1, Analisi, 03.10.2017 Funzioni reali di variabile reale Funzioni polinomiali Rette nel piano e funzioni polinomiali di I grado Sia fissato un sistema di riferimento cartesiano ortogonale monometrico
Calcolo Numerico con elementi di programmazione
 Calcolo Numerico con elementi di programmazione (A.A. 2014-2015) Appunti delle lezioni sui metodi per la soluzione di sistemi di equazioni non lineari Sistemi di equazioni non lineari Un sistema di equazioni
Calcolo Numerico con elementi di programmazione (A.A. 2014-2015) Appunti delle lezioni sui metodi per la soluzione di sistemi di equazioni non lineari Sistemi di equazioni non lineari Un sistema di equazioni
25 - Funzioni di più Variabili Introduzione
 Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 25 - Funzioni di più Variabili Introduzione Anno Accademico 2013/2014 M. Tumminello
Università degli Studi di Palermo Facoltà di Economia CdS Statistica per l Analisi dei Dati Appunti del corso di Matematica 25 - Funzioni di più Variabili Introduzione Anno Accademico 2013/2014 M. Tumminello
Esercitazione di Analisi Matematica II
 Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
Esercitazione di Analisi Matematica II Barbara Balossi 06/04/2017 Esercizi di ripasso Esercizio 1 Sia data l applicazione lineare f : R 3 R 3 definita come f(x, y, z) = ( 2x + y z, x 2y + z, x y). a) Calcolare
Processamento di immagini
 Processamento di immagini Applicazioni Immagini biomediche Modifica di immagini Confronto e registrazione... Formazione Ogge=o in - > Immagine out Processamento Immagine in - > Immagine out Analisi Immagine
Processamento di immagini Applicazioni Immagini biomediche Modifica di immagini Confronto e registrazione... Formazione Ogge=o in - > Immagine out Processamento Immagine in - > Immagine out Analisi Immagine
4. I dati sperimentali 4.1 Introduzione
 4. I dati sperimentali 4.1 Introduzione La serie esaminata, (Ceschia, 1998), è relativa alle temperature registrate alle ore 9 presso l Osservatorio Malignani a Udine-Castello. Le temperature, espresse
4. I dati sperimentali 4.1 Introduzione La serie esaminata, (Ceschia, 1998), è relativa alle temperature registrate alle ore 9 presso l Osservatorio Malignani a Udine-Castello. Le temperature, espresse
11 luglio Soluzione esame di geometria - Ing. gestionale - a.a COGNOME... NOME... N. MATRICOLA... ISTRUZIONI
 COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura ore. ISTRUZIONI Ti sono stati consegnati tre fogli, stampati fronte e retro. Come prima cosa scrivi
COGNOME.......................... NOME.......................... N. MATRICOLA............. La prova dura ore. ISTRUZIONI Ti sono stati consegnati tre fogli, stampati fronte e retro. Come prima cosa scrivi
Esercizi su estremi vincolati e assoluti
 Esercizi su estremi vincolati e assoluti Esercizio 1. di sul quadrato Determinare i punti di minimo e di massimo (e i relativi valori di minimo e massimo) assoluto f(x, y) = x cos(πy) Q = [0, 1] [0, 1].
Esercizi su estremi vincolati e assoluti Esercizio 1. di sul quadrato Determinare i punti di minimo e di massimo (e i relativi valori di minimo e massimo) assoluto f(x, y) = x cos(πy) Q = [0, 1] [0, 1].
Le derivate parziali
 Sia f(x, y) una funzione definita in un insieme aperto A R 2 e sia P 0 = x 0, y 0 un punto di A. Essendo A un aperto, esiste un intorno I(P 0, δ) A. Preso un punto P(x, y) I(P 0, δ), P P 0, possiamo definire
Sia f(x, y) una funzione definita in un insieme aperto A R 2 e sia P 0 = x 0, y 0 un punto di A. Essendo A un aperto, esiste un intorno I(P 0, δ) A. Preso un punto P(x, y) I(P 0, δ), P P 0, possiamo definire
Funzioni per la descrizione delle immagini
 Funzioni per la descrizione delle immagini Problemi della rappresentazione in piel Visti i limiti del template matching, non è pensabile di realizzare un sistema efficiente di riconoscimento che si basa
Funzioni per la descrizione delle immagini Problemi della rappresentazione in piel Visti i limiti del template matching, non è pensabile di realizzare un sistema efficiente di riconoscimento che si basa
Principi di Programmazione Prova del 10/6/2008 (ore 10.30)
") Prova del 10/6/2008 (ore 10.30) Scrivere (commentandole) le linee di codice Matlab per costruire i seguenti vettori (5x1): e il vettore di numeri complessi C tali che il singolo elemento c k ha come parte
Prova del 10/6/2008 (ore 10.30) Scrivere (commentandole) le linee di codice Matlab per costruire i seguenti vettori (5x1): e il vettore di numeri complessi C tali che il singolo elemento c k ha come parte
Appunti di Elaborazione di Segnali Multimediali a.a. 2017/2018. La segmentazione. L.Verdoliva
 Appunti di Elaborazione di Segnali Multimediali a.a. 2017/2018 L.Verdoliva è il processo che permette di partizionare un immagine in regioni (o oggetti) costituenti sulla base di specifici criteri. Il
Appunti di Elaborazione di Segnali Multimediali a.a. 2017/2018 L.Verdoliva è il processo che permette di partizionare un immagine in regioni (o oggetti) costituenti sulla base di specifici criteri. Il
Corso di Visione Artificiale. Filtri parte II. Samuel Rota Bulò
 Corso di Visione Artificiale Filtri parte II Samuel Rota Bulò Numeri complessi parte reale parte immaginaria in coordinate polari complesso coniugato formula di Eulero Trasformata di Fourier discreta (DFT)
Corso di Visione Artificiale Filtri parte II Samuel Rota Bulò Numeri complessi parte reale parte immaginaria in coordinate polari complesso coniugato formula di Eulero Trasformata di Fourier discreta (DFT)
Introduzione al Metodo agli Elementi Finiti (FEM) (x, y) Γ Tale formulazione viene detta Formulazione forte del problema.
 (x, y) Γ Tale formulazione viene detta Formulazione forte del problema.") Introduzione al Metodo agli Elementi Finiti (FEM) Consideriamo come problema test l equazione di Poisson 2 u x 2 + 2 u = f(x, y) u = f y2 definita su un dominio Ω R 2 avente come frontiera la curva Γ,
Introduzione al Metodo agli Elementi Finiti (FEM) Consideriamo come problema test l equazione di Poisson 2 u x 2 + 2 u = f(x, y) u = f y2 definita su un dominio Ω R 2 avente come frontiera la curva Γ,
ESERCITAZIONE 7 : FUNZIONI
 ESERCITAZIONE 7 : FUNZIONI e-mail: tommei@dm.unipi.it web: www.dm.unipi.it/ tommei Ricevimento: Martedi 16-18 Dipartimento di Matematica, piano terra, studio 126 20 Novembre 2012 Corso di recupero Docente:
ESERCITAZIONE 7 : FUNZIONI e-mail: tommei@dm.unipi.it web: www.dm.unipi.it/ tommei Ricevimento: Martedi 16-18 Dipartimento di Matematica, piano terra, studio 126 20 Novembre 2012 Corso di recupero Docente:
Minimi quadrati e massima verosimiglianza
 Minimi quadrati e massima verosimiglianza 1 Introduzione Nella scorsa lezione abbiamo assunto che la forma delle probilità sottostanti al problema fosse nota e abbiamo usato gli esempi per stimare i parametri
Minimi quadrati e massima verosimiglianza 1 Introduzione Nella scorsa lezione abbiamo assunto che la forma delle probilità sottostanti al problema fosse nota e abbiamo usato gli esempi per stimare i parametri
Facoltà di Ingegneria Calcolo delle Probabilità e Statistica Ingegneria Civile e A&T e Informatica
 Facoltà di Ingegneria Calcolo delle Probabilità e Statistica Ingegneria Civile e A&T e Informatica Prima prova scritta A.A. 8-9 Durata della prova h Punteggi: ) + + ; ) + + + ; ) +. Totale. Esercizio Sia
Facoltà di Ingegneria Calcolo delle Probabilità e Statistica Ingegneria Civile e A&T e Informatica Prima prova scritta A.A. 8-9 Durata della prova h Punteggi: ) + + ; ) + + + ; ) +. Totale. Esercizio Sia
1 PRELIMINARI 1.1 NOTAZIONI. denota l insieme vuoto. a A si legge a appartiene a A oppure a è elemento di A.
 1 PRELIMINARI 1.1 NOTAZIONI denota l insieme vuoto. a A si legge a appartiene a A oppure a è elemento di A. B A si legge B è un sottoinsieme di A e significa che ogni elemento di B è anche elemento di
1 PRELIMINARI 1.1 NOTAZIONI denota l insieme vuoto. a A si legge a appartiene a A oppure a è elemento di A. B A si legge B è un sottoinsieme di A e significa che ogni elemento di B è anche elemento di
Operazioni locali: Edging
 Capitolo 1 Operazioni locali: Edging Nei primi stadi della visione (early stages of vision) alcune caratteristiche intrinseche, rilevanti per identificare gli oggetti della scena sono estratte dall immagine.
Capitolo 1 Operazioni locali: Edging Nei primi stadi della visione (early stages of vision) alcune caratteristiche intrinseche, rilevanti per identificare gli oggetti della scena sono estratte dall immagine.
Esercizi svolti. delle matrici
 Esercizi svolti. astratti. Si dica se l insieme delle coppie reali (x, y) soddisfacenti alla relazione x + y è un sottospazio vettoriale di R La risposta è sì, perchè l unica coppia reale che soddisfa
Esercizi svolti. astratti. Si dica se l insieme delle coppie reali (x, y) soddisfacenti alla relazione x + y è un sottospazio vettoriale di R La risposta è sì, perchè l unica coppia reale che soddisfa
Curve e lunghezza di una curva
 Curve e lunghezza di una curva Definizione 1 Si chiama curva il luogo geometrico dello spazio di equazioni parametriche descritto da punto p, chiuso e limitato. Definizione 2 Si dice che il luogo C è una
Curve e lunghezza di una curva Definizione 1 Si chiama curva il luogo geometrico dello spazio di equazioni parametriche descritto da punto p, chiuso e limitato. Definizione 2 Si dice che il luogo C è una
ESERCITAZIONE SUI PUNTI STAZIONARI DI FUNZIONI LIBERE E SULLE FUNZIONI OMOGENEE
 ESERCITAZIONE SUI PUNTI STAZIONARI DI FUNZIONI LIBERE E SULLE FUNZIONI OMOGENEE 1 Funzioni libere I punti stazionari di una funzione libera di più variabili si ottengono risolvendo il sistema di equazioni
ESERCITAZIONE SUI PUNTI STAZIONARI DI FUNZIONI LIBERE E SULLE FUNZIONI OMOGENEE 1 Funzioni libere I punti stazionari di una funzione libera di più variabili si ottengono risolvendo il sistema di equazioni
Lezione 6 Richiami di Geometria Analitica
 1 Piano cartesiano Lezione 6 Richiami di Geometria Analitica Consideriamo nel piano due rette perpendicolari che si intersecano in un punto O Consideriamo ciascuna di queste rette come retta orientata
1 Piano cartesiano Lezione 6 Richiami di Geometria Analitica Consideriamo nel piano due rette perpendicolari che si intersecano in un punto O Consideriamo ciascuna di queste rette come retta orientata
SIMULAZIONE - 29 APRILE QUESITI
 www.matefilia.it SIMULAZIONE - 29 APRILE 206 - QUESITI Q Determinare il volume del solido generato dalla rotazione attorno alla retta di equazione y= della regione di piano delimitata dalla curva di equazione
www.matefilia.it SIMULAZIONE - 29 APRILE 206 - QUESITI Q Determinare il volume del solido generato dalla rotazione attorno alla retta di equazione y= della regione di piano delimitata dalla curva di equazione
Equazioni e sistemi non lineari
 Equazioni e sistemi non lineari Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di Newton-Raphson
Equazioni e sistemi non lineari Lucia Gastaldi DICATAM - Sezione di Matematica, http://lucia-gastaldi.unibs.it Indice 1 Ricerca degli zeri di una funzione Problema e definizioni Metodo di Newton-Raphson
II Università degli Studi di Roma
 Versione preliminare gennaio TOR VERGATA II Università degli Studi di Roma Dispense di Geometria. Capitolo 3. 7. Coniche in R. Nel Capitolo I abbiamo visto che gli insiemi di punti P lineare di primo grado
Versione preliminare gennaio TOR VERGATA II Università degli Studi di Roma Dispense di Geometria. Capitolo 3. 7. Coniche in R. Nel Capitolo I abbiamo visto che gli insiemi di punti P lineare di primo grado
Elaborazione nel dominio delle frequenze. Elaborazione delle immagini digitali 1
 Elaborazione nel dominio delle frequenze Elaborazione delle immagini digitali 1 Serie di Fourier Elaborazione delle immagini digitali 2 Introduzione alla trasformata di Fourier Una funzione periodica può
Elaborazione nel dominio delle frequenze Elaborazione delle immagini digitali 1 Serie di Fourier Elaborazione delle immagini digitali 2 Introduzione alla trasformata di Fourier Una funzione periodica può
Operatori locali su immagini digitali
 Operatori locali su immagini digitali Deinizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali Deinizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Elaborazione delle immagini
 Scuola di Specializzazione in Fisica Sanitaria a.a. 2005/2006 Corso di Informatica e Statistica Medica Elaborazione delle immagini 1/3/2006 Filtri non lineari Tra i filtri non lineari il più conosciuto
Scuola di Specializzazione in Fisica Sanitaria a.a. 2005/2006 Corso di Informatica e Statistica Medica Elaborazione delle immagini 1/3/2006 Filtri non lineari Tra i filtri non lineari il più conosciuto
Segmentazione di immagini in scala di grigio basata su clustering
 Segmentazione di immagini in scala di grigio basata su clustering Davide Anastasia, Nicola Cogotti 24 gennaio 06 1 Analisi del problema La segmentazione di immagini consiste nella suddivisione in un certo
Segmentazione di immagini in scala di grigio basata su clustering Davide Anastasia, Nicola Cogotti 24 gennaio 06 1 Analisi del problema La segmentazione di immagini consiste nella suddivisione in un certo
4. VALORI CENTRALI. Statistica sociale
 UNIVERSITA DEGLI STUDI DI PERUGIA DIPARTIMENTO DI FILOSOFIA SCIENZE SOCIALI UMANE E DELLA FORMAZIONE Corso di Laurea in Scienze per l'investigazione e la Sicurezza. VALORI CENTRALI Prof. Maurizio Pertichetti
UNIVERSITA DEGLI STUDI DI PERUGIA DIPARTIMENTO DI FILOSOFIA SCIENZE SOCIALI UMANE E DELLA FORMAZIONE Corso di Laurea in Scienze per l'investigazione e la Sicurezza. VALORI CENTRALI Prof. Maurizio Pertichetti
LA STRUTTURA DEI PROBLEMI DI OTTIMIZZAZIONE. L'ipotesi di razionalità implica che un decisore cerchi di
 LA STRUTTURA DEI PROBLEMI DI OTTIMIZZAZIONE L'ipotesi di razionalità implica che un decisore cerchi di individuare la migliore tra tutte le alternative a sua disposizione. Problemi di ottimizzazione =
LA STRUTTURA DEI PROBLEMI DI OTTIMIZZAZIONE L'ipotesi di razionalità implica che un decisore cerchi di individuare la migliore tra tutte le alternative a sua disposizione. Problemi di ottimizzazione =
Vettori applicati. Capitolo Richiami teorici. Definizione 1.1 Un sistema di vettori applicati Σ è un insieme
 Capitolo 1 Vettori applicati 1.1 Richiami teorici Definizione 1.1 Un sistema di vettori applicati Σ è un insieme {(P i,v i ), P i E, v i V, i = 1,...,N}, (1.1) dove P i è detto punto di applicazione del
Capitolo 1 Vettori applicati 1.1 Richiami teorici Definizione 1.1 Un sistema di vettori applicati Σ è un insieme {(P i,v i ), P i E, v i V, i = 1,...,N}, (1.1) dove P i è detto punto di applicazione del
Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler)
") Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler) Studio di una funzione Funzioni crescenti e decrescenti Una funzione f è crescente nell intervallo (a, b) se
Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler) Studio di una funzione Funzioni crescenti e decrescenti Una funzione f è crescente nell intervallo (a, b) se
Una libreria di funzioni per la geometria analitica
 Una libreria di funzioni per la geometria analitica Michele Impedovo La geometria analitica del piano costituisce uno dei più importanti e consolidati argomenti di matematica. Un lavoro interessante parallelo
Una libreria di funzioni per la geometria analitica Michele Impedovo La geometria analitica del piano costituisce uno dei più importanti e consolidati argomenti di matematica. Un lavoro interessante parallelo
figura. A figura. B Il modulo è la lunghezza o intensità del vettore. Il punto di applicazione è l origine del vettore detto anche coda.
 Martinelli Sara 1A Lab. Di fisica del Liceo Scopo: verificare la regola del parallelogramma. Materiale utilizzato: Telaio 5 morse Asta orizzontale Base metallica 2 piantane verticali Pesi Goniometro stampato
Martinelli Sara 1A Lab. Di fisica del Liceo Scopo: verificare la regola del parallelogramma. Materiale utilizzato: Telaio 5 morse Asta orizzontale Base metallica 2 piantane verticali Pesi Goniometro stampato
GEOMETRIA ANALITICA 1 IL PIANO CARTESIANO
 GEOMETRI NLITIC 1 IL PINO CRTESINO Il piano cartesiano è costituito da due rette orientate e tra loro perpendicolari chiamate assi cartesiani, generalmente una orizzontale e l altra verticale, sulle quali
GEOMETRI NLITIC 1 IL PINO CRTESINO Il piano cartesiano è costituito da due rette orientate e tra loro perpendicolari chiamate assi cartesiani, generalmente una orizzontale e l altra verticale, sulle quali
Esercizi geometria analitica nello spazio. Corso di Laurea in Informatica. Docente: Andrea Loi. Correzione
 Esercizi geometria analitica nello spazio Corso di Laurea in Informatica Docente: Andrea Loi Correzione 1. Denotiamo con P 1, P 13, P 3, P 1, P, P 3, P i simmetrici di un punto P rispetto ai piani coordinati
Esercizi geometria analitica nello spazio Corso di Laurea in Informatica Docente: Andrea Loi Correzione 1. Denotiamo con P 1, P 13, P 3, P 1, P, P 3, P i simmetrici di un punto P rispetto ai piani coordinati
Video Parte 4a. Stabilizzazione. Multimedia
 Video Parte 4a Stabilizzazione Stabilizzazione Un sistema di stabilizzazione dell immagine ha come scopo quello di rimuovere i movimenti da una sequenza di immagini Padding: movimenti intenzionali Jitter:
Video Parte 4a Stabilizzazione Stabilizzazione Un sistema di stabilizzazione dell immagine ha come scopo quello di rimuovere i movimenti da una sequenza di immagini Padding: movimenti intenzionali Jitter:
Introduzione alla Matematica per le Scienze Sociali - parte II
 Introduzione alla Matematica per le Scienze Sociali - parte II Lucrezia Fanti Istituto Nazionale per l Analisi delle Politiche Pubbliche (INAPP) lucrezia.fanti@uniroma1.it Lucrezia Fanti Intro Matematica
Introduzione alla Matematica per le Scienze Sociali - parte II Lucrezia Fanti Istituto Nazionale per l Analisi delle Politiche Pubbliche (INAPP) lucrezia.fanti@uniroma1.it Lucrezia Fanti Intro Matematica
Sistemi di Elaborazione dell Informazione 170. Caso Non Separabile
 Sistemi di Elaborazione dell Informazione 170 Caso Non Separabile La soluzione vista in precedenza per esempi non-linearmente separabili non garantisce usualmente buone prestazioni perchè un iperpiano
Sistemi di Elaborazione dell Informazione 170 Caso Non Separabile La soluzione vista in precedenza per esempi non-linearmente separabili non garantisce usualmente buone prestazioni perchè un iperpiano
Esercizi Riepilogativi Svolti
 Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Esercizi GEOMETRIA Edile-Architettura e dell Edilizia SPAZI EUCLIDEI. TRASFORMAZIONI. ORIENTAZIONI. FORMULE DI GEOMETRIA IN R. Docente:
Universita degli Studi di Roma - "Tor Vergata" - Facolta Ingegneria Esercizi GEOMETRIA Edile-Architettura e dell Edilizia SPAZI EUCLIDEI. TRASFORMAZIONI. ORIENTAZIONI. FORMULE DI GEOMETRIA IN R. Docente:
8 Valore assoluto. 8.1 Definizione e proprietà
 8 Valore assoluto 8. Definizione e proprietà Si dice valore assoluto o modulo di un numero reale, e si indica con, il numero stesso se questo è positivo o nullo, altrimenti il suo opposto -, in simboli:
8 Valore assoluto 8. Definizione e proprietà Si dice valore assoluto o modulo di un numero reale, e si indica con, il numero stesso se questo è positivo o nullo, altrimenti il suo opposto -, in simboli:
Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler)
") Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler) Studio di una funzione Funzioni crescenti e decrescenti Una funzione f é crescente nell intervallo (a, b) se
Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler) Studio di una funzione Funzioni crescenti e decrescenti Una funzione f é crescente nell intervallo (a, b) se
Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler)
") Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler) Studio di una funzione Funzioni crescenti e decrescenti Una funzione f é crescente nell intervallo (a, b) se
Calcolo differenziale 2: Massimi e minimi. Studio di una funzione. (M.S.Bernabei & H. Thaler) Studio di una funzione Funzioni crescenti e decrescenti Una funzione f é crescente nell intervallo (a, b) se
Elementi di matematica - dott. I. GRASSI
 Gli assi cartesiani e la retta. Il concetto di derivata. È ormai d uso comune nei libri, in televisione, nei quotidiani descrivere fenomeni di varia natura per mezzo di rappresentazioni grafiche. Tali
Gli assi cartesiani e la retta. Il concetto di derivata. È ormai d uso comune nei libri, in televisione, nei quotidiani descrivere fenomeni di varia natura per mezzo di rappresentazioni grafiche. Tali
GEOMETRIA ANALITICA
 GEOMETRIA ANALITICA matematica@blogscuola.it LE COORDINATE CARTESIANE Quando si vuole fissare un sistema di coordinate cartesiane su una retta r, è necessario considerare: un punto O detto origine; un
GEOMETRIA ANALITICA matematica@blogscuola.it LE COORDINATE CARTESIANE Quando si vuole fissare un sistema di coordinate cartesiane su una retta r, è necessario considerare: un punto O detto origine; un