Dato un vettore di lunghezza N, questo può essere pensato come un elemento di uno spazio N dimensionale.
|
|
|
- Flaviana Lanza
- 5 anni fa
- Visualizzazioni
Transcript
1 Base canonica Dato un vettore di lunghezza N, questo può essere pensato come un elemento di uno spazio N dimensionale Quindi possiamo scomporlo usando la base canonica di tale spazio. Qual è la base canonica? 1
2 = 234 * * * * * * * * *
3 Lo stesso ragionamento vale per le immagini = * * * * * * * * *
4 Operatori locali 4
5 Operazioni locali Il valore d uscita di ogni pixel dipende da un limitato intorno del corrispondente punto in input. Sono usati per migliorare la qualità delle immagini o per estrarre delle informazioni dall immagine. Si possono pensare come filtraggi dell immagine. Un filtraggio è ottenuto facendo la convoluzione tra l immagine ed una matrice. 5
6 Operatori Lineari Un operatore F : V W si dice LINEARE se per ogni coppia di vettori v 1 e v 2 in V e per ogni coppia di scalari a,b si ha che: F(a v 1 + b v 2 ) = a F(v 1 ) + b F(v 2 ) Conseguenza: se conosco una base di V ed il comportamento dell operatore F su ogni elemento di tale base, posso calcolare il comportamento di F su ogni elemento di V. 6
7 La funzione f(x,y)=(x/2,y/3) è lineare? SI Per essere lineare dovrebbe verificarsi l uguaglianza a*f(x 1,y 1 )+b*f(x 2,y 2 )=f(ax 1 +bx 2,ay 1 +by 2 ) Il primo membro è a*(x 1 /2,y 1 /3)+b*(x 2 /2,y 2 /3)=(ax 1 /2+bx 2 /2,ay 1 /3+by 2 /3) Il secondo membro è ((ax 1 +bx 2 )/2,(ay 1 +by 2 )/3) Ovviamente i due membri sono uguali e quindi la funzione è lineare. 7
8 La funzione f(x,y)=(255-x,255-y) è lineare? NO Per essere lineare dovrebbe verificarsi l uguaglianza a*f(x 1,y 1 )+b*f(x 2,y 2 )=f(ax 1 +bx 2,ay 1 +by 2 ) Il primo membro è a*(255-x 1,255-y 1 )+b*(255-x 2,255-y 2 )= (a*255-a*x 1,a*255-a*y 1 ) + (b*255-b*x 2,b*255-b*y 2 )= (a*255-a*x 1 + b*255-b*x 2, a*255-a*y 1 + b*255-b*y 2 ) Il secondo membro è (255 (ax 1 +bx 2 ), 255 (ay 1 +by 2 )) = (255 ax 1 -bx 2 ), 255 ay 1 - by 2 )) Ovviamente i due membri sono differenti quindi la funzione NON è lineare. 8
9 Invariante per traslazione? Gli esempi nelle slide precedenti hanno un comportamento che non è lo stesso su tutti gli elementi della base canonica di R N. Infatti: il comportamento varia da elemento ad elemento a seconda della posizione all interno della immagine. Questo è un operatore NON invariante per traslazioni! Per descrivere questi operatori, dobbiamo conoscere il suo comportamento su ciascun impulso in ciascuna locazione delle immagini! Attenzione: questi operatori non sono cattivi ma solo difficili da studiare 9
10 Operatori invarianti per traslazione Un operatore si dice invariante per traslazione (shift invariant) quando il suo comportamento sulle immagini impulsive è sempre il medesimo indipendentemente dalla posizione in cui si trova il pixel. Tutti gli operatori puntuali sono invarianti per traslazione (anche se non sono lineari). 10
11 Operatore negativo f(x,y)=(255-i(x,y)) L operatore negativo è invariante per traslazione. L operatore prende il valore di grigio nel punto (x,y) e lo sottrae a 255. Questo comportamento è sempre lo stesso per tutti i medesimi livelli, indipendentemente dalla posizione che occupano nell immagine. ATTENZIONE. La funzione f(x,y)=(255-x,255-y) non è la funzione negativo! 11
12 Riassumendo: Se F è lineare per descriverlo basta conoscere il comportamento su tutte le immagini impulsive Se F è shift invariant si comporta allo stesso modo su tutti gli impulsi, indipendentemente dalla loro posizione Se F è sia lineare che shift invariant per descriverlo basta conoscere come si comporta su un solo impulso. La risposta all impulso o point spread function di F è la carta di indentità di tale operatore. 12
13 Ad un operatore lineare e shift invariante corrisponde una maschera ma vale anche il viceversa: ad una maschera corrisponde un simile operatore ESEMPIO Si consideri l operazione che preso un impulso: lo trasforma in: Tale risposta all impulso o PSF definisce completamente un operatore lineare e invariante per traslazioni F. Spesso un operatore su una immagine prende il nome di filtro. La matrice che descrive la risposta all impulso si chiama anche kernel o maschera dell operatore. Essa è detta anche maschera di convoluzione di F per ragioni che vedremo tra breve. 13
14 prima dopo 14
15 Kernel finiti o infiniti e complessità La grandezza del kernel può variare fino ad essere infinita Per ragioni pratiche, però, si usano solo kernel con dimensioni finite. Le dimensioni del kernel influenzano la complessità della operazione di filtraggio. Tale complessità dipende ovviamente anche dal numero dei pixel di una immagine. 15
16 Perché filtri convolutivi? I filtri lineari e invarianti per traslazione vengono chiamati anche filtri convolutivi. Dobbiamo studiare la operazione di convoluzione per capire meglio come un filtro può essere calcolato. Inoltre la convoluzione è un fenomeno estremamente importante per ogni tipo di signal processing e per la descrizione di numerosi eventi fisici. 16
17 Convoluzione: proprietà Per indicare l operazione di convoluzione si usa la notazione h = f g La convoluzione è commutativa f g = g f La convoluzione è associativa (f g) h = f (g h) 17
18 g f 18
19 Nel caso finito (1) Se il kernel f ha dimensioni kxh la formula va riscritta nella seguente maniera h k 2 = k / 1 h / 2 1 m, n = * i 2 j= h / 2 ( f ) i, j gm+ i, n+ j a b c d e f g h i Se gli indici del kernel sono disposti in modo da avere il punto di coordinate (0,0) nella posizione centrale. 19
20 Nel caso finito (2) h Se il kernel f ha dimensioni kxh la formula va riscritta nella seguente maniera k, h = m, n fi, j * i= 1, j= 1 g m+ ( i k + k / 2 ), n+ ( j h+ h / a b c d e f g h i Se gli indici del kernel sono disposti partendo da 1 fino ad arrivare ad h o k. )
21 Esempio
22 Esempio
23 Esempio
24 Esempio
25 Convoluzione e filtraggio Applicare un filtro lineare e shift invariante ad una immagine è equivalente a calcolare la convoluzione del kernel del filtro con l immagine. 25
26 Nell implementazione Un problema è quello dei bordi: come fare la convoluzione e il filtraggio ai bordi? POSSIBILI SOLUZIONI: a) Filtrare solo le zone centrali dell immagine b) Supporre che tutto intorno all immagine ci sia 0 c) Assumere una topologia toroidale : quando si sfora a destra si rientra a sinistra, quando si sfora in basso di rientra in alto e viceversa; d) Aggiungere una riga all inizio uguale alle riga precedente, una riga alla fine uguale all ultima riga, una colonna all inizio uguale alla colonna iniziale, e una colonna alla fine uguale alla colonna finale. 26
27 a) Filtrare solo le zone centrali dell immagine input Le aree in grigio non verranno calcolate output
28 b) Supporre che tutto intorno all immagine di input ci sia lo 0 input output
29 c) Riempire le righe e le colonne aggiunte in maniera toroidale input output
30 d) Riempire le righe e le colonne aggiunte con i valori più vicini input output
31 Esempi di operatori locali 31
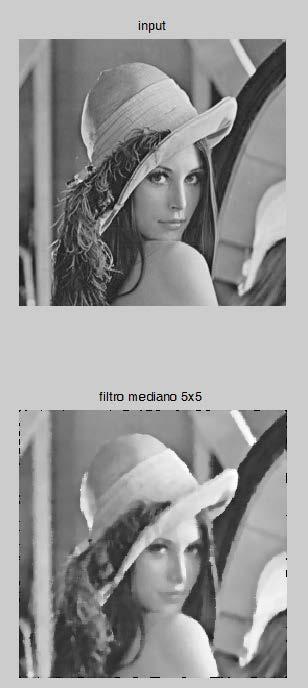
32 Mediano È un filtro non lineare che fornisce in uscita il valore mediano dell intorno del pixel. 32
33 Filtro mediano 33
34 Minimo e massimo Oltre al filtro mediano esistono altri filtri statistici detti order statistics. Il filtro di minimo preso un intorno mxm di un pixel (con m generalmente dispari), sostituiscono il valore del pixel con il valore minimo di tutti i valori osservati in tale intorno. Il filtro di massimo preso un intorno mxm di un pixel (con m generalmente dispari), sostituiscono il valore del pixel con il valore massimo di tutti i valori osservati in tale intorno. Se si sostituisce con il minimo si ottiene un incupimento dell immagine (si eliminano per esempio macchioline chiare); Se si sostituisce con il massimo si ottiene uno schiarimento dell immagine (si eliminano per esempio punti neri). 34
35 Filtro di minimo 35
36 Filtro di massimo 36
37 N-box (o di media) Sono definiti da kernel N x N con ogni elemento pari a 1/N 2. Si sceglie generalmente un valore N dispari. Hanno l effetto di sfocare le immagini. La sfocatura è molto forte in orizzontale e verticale ma meno in diagonale. ESEMPI: 3-box 1/9 * box 1/25 *

38 Filtro 3-box 38

39 5-box 7-box originale 3-box
40 N-binomiale Sono filtri di smussamento con kernel derivati dalla distribuzione binomiale. Poiché tale distribuzione è una approssimazione discreta della distribuzione gaussiana sono anche detti filtri gaussiani. Hanno il pregio di smussare egualmente in tutte le direzioni. Smussano meno vigorosamente degli n-box. 3-binomiale 5-binomiale 1/16 * /256 *
41 Filtro 3-binomiale 41
42 5-binomiale 7-binomiale originale 3-binomiale
43 Conservazione dell energia Con abuso di linguaggio, derivato dalla Fisica, si dice che un filtro conserva l energia se la somma dei suoi pesi fa 1. Tutti i filtri di smoothing visti prima sono energy preserving : la somma dei valori totali della luminanza nella immagine non cambia. Esistono anche filtri non energy preserving 43
44 Noise cleaning e smoothing I filtri appena visti servono anche a ridurre il rumore in una immagine. In questo caso, più è grande il kernel e migliore sarà il risultato anche se si rischia di aumentare la sfocatura. I filtri N-box e N-binomiali sono anche usati per sfocare l immagine (smoothing). In questo caso, più è grande il kernel e maggiore sarà la sfocatura ma si riduce meglio il rumore. 44
45 Il rumore Ci sono due tipi principali di rumore: Rumore impulsivo, detto anche sale e pepe. Viene caratterizzato dalla frazione dell immagine modificata (in %); Rumore gaussiano bianco. Viene caratterizzato dalla media e dalla varianza. 45
46 Esempi di rumore «sale e pepe» con 1% di pixel danneggiati 46
47 Esempi di rumore «sale e pepe» con 10% di pixel danneggiati 47

48 Esempi di rumore «sale e pepe» con 20% di pixel danneggiati 48

49 Rimozione del rumore S&P Sia il filtro media che il mediano hanno dimensioni 3x3 Per questo tipo di rumore il filtro mediano funziona meglio. 49

50 Rimozione del rumore gaussiano Sia il filtro media che il mediano hanno dimensioni 3x3 Per questo tipo di rumore il filtro media funziona meglio. 50
51 Dimensioni del kernel Se il rumore è molto diffuso, è meglio un kernel più grande oppure è meglio applicare iterativamente lo stesso kernel? Facciamo una prova sul rumore sale e pepe al 20%. Prima applichiamo per due volte un kernel 3x3. poi applichiamo all immagine con rumore un kernel 5x5. In entrambi i casi si elimina il rumore, ma il primo approccio sfoca di meno l immagine finale. 51

52 52

53 Rimozione del rumore S&P 53
54 Rimozione del rumore S&P 54


55 Esempi di rumore Gaussiano 55

56 Rimozione del rumore Gaussiano 56
57 Media vs mediano Perché i filtri mediani danno risultati migliori rispetto a quelli di media? Il filtro media tende a creare dei livelli di grigio prima non esistenti. Il filtro di media non attenua solo il rumore ma anche tutte le alte frequenze spaziali in maniera indiscriminata dando origine ad immagini sfocate. Il filtro mediano non deteriora i lati, ma elimina i picchi con base piccola rispetto al kernel. 57
58 Altri filtri (per la rimozione del rumore) Esistono altri filtri non lineari molto importanti: Outlier: il valore del pixel centrale viene confrontato con il valore della media dei suoi 8 vicini. Se il valore assoluto della differenza è maggiore di una certa soglia, allora il punto viene sostituito dal valore medio, altrimenti non viene modificato. Olimpico: da un dato intorno si scartano i valori massimo e minimo e sul resto si fa la media. 58
59 Estrazione di contorni 59
60 Estrazione dei contorni Gli operatori locali ci aiutano ad estrarre i contorni da una immagine. I contorni sono definiti come delle discontinuità locali della luminanza. Gli edge detector forniscono immagini in cui sono preservate le variazioni di luminanza ed eliminate tutte le altre informazioni. 60
61 Esempi di lato in 1D 61
62 Edge detector basati sulla derivata prima Se ho un segnale monodimensionale e calcolo la derivata prima, scopro che i lati sono i corrispondenza dei massimi della derivata. Quindi i filtri devono calcolare la derivata in direzione x quella in direzione y e poi combinarle insieme. 62
63 Kernel notevoli: lati orizzontali Ne esistono molti, ne presentiamo due: X-Prewitt 63
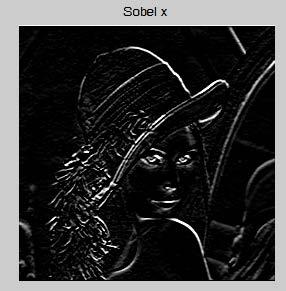
64 Sobel x 64
65 Prewitt x 65

66 Dopo l applicazione di X-Prewitt e un passo di equalizzazione Dopo l applicazione di x-sobel e un passo di equalizzazione
67 Kernel notevoli: lati verticali La situazione è identica al caso dei lati orizzontali, i filtri sono solo ruotati di 90 gradi. 67

68 Sobel y 68
69 Prewitt y 69

70 Dopo l applicazione di Y-Prewitt e un passo di equalizzazione Dopo l applicazione di y-sobel e un passo di equalizzazione
71 Sobel x fornisce una matrice con i lati orizzontali (e le componenti orizzontali dei lati obbliqui) che hanno valori non nulli. Sobel y fornisce una matrice con i lati verticali (e le componenti verticali dei lati obbliqui) che hanno valori non nulli. Le due matrici possono essere combinate insieme mediante la seguente formula sqrt(sobel_x^2+sobel_y^2) la matrice ottenuta ha valori non nulli per i pixel «di lato». Se si fissa una soglia adeguata, si può ottenere una matrice binaria che per ogni pixel ci dica se è o non è di lato. Ovviamente le stesse Interazione considerazioni & Multimedia valgono per Prewitt.



72 72
73 Migliori risultati Si ottengono con algoritmi più sofisticati (non lineari) per il calcolo della grandezza del gradiente (somma del quadrato della risposta di un edge finder orizzontale e del quadrato della risposta di un edge finder verticale) Si ottengono con strategie più intelligenti (algoritmo di Canny, algoritmi fuzzy, tecniche di backtracking eccetera) 73
74 Edge detector basati sulla derivata seconda Se ho un segnale monodimensionale e calcolo la derivata seconda, scopro che in corrispondenza del lato essa passa per lo zero. 74
75 Kernel notevoli: Laplaciano Il filtro più diffuso per calcolare la derivata seconda è detto Laplaciano, ed è definito dalla maschera: 75

76 Zero-crossing Dopo aver applicato l operatore Laplaciano è necessario che si verifichi la condizione di Zero-crossing. Cioè, deve sempre accadere che rispetto al punto in questione ci sia nel suo intorno un valore positivo e un valore negativo. 76
77 Laplaciano 77

78 Laplaciano 78

79 Confronto 79
80 Filtri di sharpening 80
81 Filtri di sharpening Sono filtri il cui scopo è quello di incrementare la nitidezza di una immagine aumentando il contrasto locale. Questa è una operazione opposta allo sfocamento. Per ottenere tale effetto si può adottare una maschera che, derivata dal Laplaciano, rinforza i lati presenti nell immagine. Purtroppo essa rinforza anche il rumore presente nella immagine! 81

82 Filtro di sharpening 82
83 Unsharp mask: un algoritmo non lineare L uso del kernel derivato dal Laplaciano per fare edge enhancing ha un difetto: esso viene applicato SEMPRE a tutti i pixel dell immagine. Come conseguenza esso accentua i dettagli anche nelle zone omogene mettendo in evidenza i difetti ed il rumore. Sono stati proposti vari algoritmi per evitare questo fenomeno. La famiglia di algoritmi chiamata unsharp mask è la più famosa usata per questo scopo. Noi non vedremo i dettagli di questo algoritmo. 83
Operatori locali su immagini digitali
 Operatori locali su immagini digitali Definizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali Definizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Image Processing 2. Dispense del corso di Elaborazione di Immagini e Audio Digitali. Prof. Roberto Vezzani.
 http://imagelab.ing.unimo.it Dispense del corso di Elaborazione di Immagini e Audio Digitali Image Processing 2 Prof. Roberto Vezzani Relazioni tra pixel Esistono delle relazioni di base tra pixel in un
http://imagelab.ing.unimo.it Dispense del corso di Elaborazione di Immagini e Audio Digitali Image Processing 2 Prof. Roberto Vezzani Relazioni tra pixel Esistono delle relazioni di base tra pixel in un
Filtraggio. Stefano Ferrari. Università degli Studi di Milano Tecniche di calcolo e sistemi operativi e informatica
 Filtraggio Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Tecniche di calcolo e sistemi operativi e informatica anno accademico 2017 2018 Filtraggio Il termine filtraggio fa
Filtraggio Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Tecniche di calcolo e sistemi operativi e informatica anno accademico 2017 2018 Filtraggio Il termine filtraggio fa
Operatori locali su immagini digitali
 Operatori locali su immagini digitali Deinizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Operatori locali su immagini digitali Deinizione degli operatori locali Filtri di smoothing Filtri di sharpening Filtri derivativi Operatori locali Questi operatori sono usati per: miglioramento della
Trasformare e migliorare
 Trasformare e migliorare Elaborazione di immagini Da f(x,y) a g(x,y) pixel trasformati secondo un determinato algoritmo f(x,y) g(x,y) Scopi dell elaborazione Eliminazione dei disturbi Esaltazione dei particolari
Trasformare e migliorare Elaborazione di immagini Da f(x,y) a g(x,y) pixel trasformati secondo un determinato algoritmo f(x,y) g(x,y) Scopi dell elaborazione Eliminazione dei disturbi Esaltazione dei particolari
Operatori locali. Operatori locali. Q=f(P,w)
") Operatori locali Operatori locali P(i,j) Gli operatori locali associano ad ogni piel ( i,j) della immagine di output Q un valore calcolato in un intorno o finestra w centrata nel piel P(i,j) Q=f(P,w) Operatori
Operatori locali Operatori locali P(i,j) Gli operatori locali associano ad ogni piel ( i,j) della immagine di output Q un valore calcolato in un intorno o finestra w centrata nel piel P(i,j) Q=f(P,w) Operatori
Elaborazione di immagini digitali: trasformare e migliorare
 Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Elaborazione di Immagini e Suoni / Riconoscimento e Visioni Artificiali 12 c.f.u. Anno Accademico 2009/2010 Docente: ing. Salvatore
Università degli Studi di Palermo Dipartimento di Ingegneria Informatica Elaborazione di Immagini e Suoni / Riconoscimento e Visioni Artificiali 12 c.f.u. Anno Accademico 2009/2010 Docente: ing. Salvatore
Sharpening mediante filtraggio spaziale
 Sharpening mediante filtraggio spaziale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Sharpening Il termine sharpening
Sharpening mediante filtraggio spaziale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini anno accademico 2009 2010 Sharpening Il termine sharpening
Operazioni sulle immagini. Multimedia
 Operazioni sulle immagini Semplificazione: toni di grigio Per semplificare la trattazione del problema lavoreremo solo su immagini a toni di grigio. Le medesime operazioni descritte per tali immagini si
Operazioni sulle immagini Semplificazione: toni di grigio Per semplificare la trattazione del problema lavoreremo solo su immagini a toni di grigio. Le medesime operazioni descritte per tali immagini si
ELABORAZIONE DELLE IMMAGINI:
 Università degli Studi di Catania Facoltà di Scienze Matematiche,Fisiche e Naturali Corso di Laurea in Informatica, Secondo Livello ELABORAZIONE DELLE IMMAGINI: EDGE DETECTION Corso di Analisi Numerica
Università degli Studi di Catania Facoltà di Scienze Matematiche,Fisiche e Naturali Corso di Laurea in Informatica, Secondo Livello ELABORAZIONE DELLE IMMAGINI: EDGE DETECTION Corso di Analisi Numerica
Estrazione dei bordi
 Estrazione dei bordi L algoritmo di Marr-Hildreth L algoritmo di Canny Operatori per l estrazione dei bordi (edge operators) Lo scopo di questi operatori è quello di generare un immagine dei bordi (edge
Estrazione dei bordi L algoritmo di Marr-Hildreth L algoritmo di Canny Operatori per l estrazione dei bordi (edge operators) Lo scopo di questi operatori è quello di generare un immagine dei bordi (edge
Elaborazione di immagini. I filtri Digital Image Processing
 Elaborazione di immagini I filtri Digital Image Processing Tre livelli di image processing Basso livello Filtro di smoothing Tre livelli di image processing Medio livello Contrast saliency region detection,
Elaborazione di immagini I filtri Digital Image Processing Tre livelli di image processing Basso livello Filtro di smoothing Tre livelli di image processing Medio livello Contrast saliency region detection,
Operatori locali. Analisi di basso livello
 Operatori locali Analisi di basso livello Si applica ad una immagine per produrre una immagine utile all applicazione inale Obiettivo è il miglioramento della immagine e riduzione del rumore introdotto
Operatori locali Analisi di basso livello Si applica ad una immagine per produrre una immagine utile all applicazione inale Obiettivo è il miglioramento della immagine e riduzione del rumore introdotto
Introduzione a Matlab
 Introduzione a Matlab Operazioni di Base & Edge Detection Fondamenti di Visione Artificiale a.a. 25/26 2/5/6 Estrazione dei Contorni Lezione V: indice Filtri e Kernel Line Detection Edge Detection Edge
Introduzione a Matlab Operazioni di Base & Edge Detection Fondamenti di Visione Artificiale a.a. 25/26 2/5/6 Estrazione dei Contorni Lezione V: indice Filtri e Kernel Line Detection Edge Detection Edge
L istogramma. Interazione & Multimedia 2
 Istogramma 1 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione
Istogramma 1 L istogramma I pixel di una immagine sono una popolazione sulla quale possiamo calcolare tutte le quantità statistiche descrittive che si usano normalmente: Media, mediana, varianza, deviazione
PIXEL. Il valore quantizzato misurato da ciascun sensore diventa un. PICTURE ELEMENT = PIXEL dell immagine. Interazione & Multimedia
 La risoluzione PIXEL Il valore quantizzato misurato da ciascun sensore diventa un PICTURE ELEMENT = PIXEL dell immagine La risoluzione Definizione: si dice risoluzione il numero di pixel per unità di misura.
La risoluzione PIXEL Il valore quantizzato misurato da ciascun sensore diventa un PICTURE ELEMENT = PIXEL dell immagine La risoluzione Definizione: si dice risoluzione il numero di pixel per unità di misura.
Elementi di grafica raster
 Elementi di grafica raster Segnali mono-bidimensionali Segnale: variazione di una grandezza fisica rispetto al tempo e/o allo spazio cioè Valore della grandezza ad ogni istante di tempo (spazio) Un segnale
Elementi di grafica raster Segnali mono-bidimensionali Segnale: variazione di una grandezza fisica rispetto al tempo e/o allo spazio cioè Valore della grandezza ad ogni istante di tempo (spazio) Un segnale
Sistemi ottici come sistemi lineari
 Sistemi ottici come sistemi lineari Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it http://boccignone.di.unimi.it/pmp_2017.html
Sistemi ottici come sistemi lineari Corso di Principi e Modelli della Percezione Prof. Giuseppe Boccignone Dipartimento di Informatica Università di Milano boccignone@di.unimi.it http://boccignone.di.unimi.it/pmp_2017.html
Sistemi lineari - Parte Seconda - Esercizi
 Sistemi lineari - Parte Seconda - Esercizi Terminologia Operazioni elementari sulle righe. Equivalenza per righe. Riduzione a scala per righe. Rango di una matrice. Forma canonica per righe. Eliminazione
Sistemi lineari - Parte Seconda - Esercizi Terminologia Operazioni elementari sulle righe. Equivalenza per righe. Riduzione a scala per righe. Rango di una matrice. Forma canonica per righe. Eliminazione
Corso di Visione Artificiale. Filtri parte I. Samuel Rota Bulò
 Corso di Visione Artificiale Filtri parte I Samuel Rota Bulò Filtri spaziali Un filtro spaziale è caratterizzato da un intorno e un'operazione che deve essere eseguita sui pixels dell'immagine in quell'intorno.
Corso di Visione Artificiale Filtri parte I Samuel Rota Bulò Filtri spaziali Un filtro spaziale è caratterizzato da un intorno e un'operazione che deve essere eseguita sui pixels dell'immagine in quell'intorno.
Liste di Liste Matrici
 Liste di Liste Matrici Una lista annidata è una lista che compare come elemento di un'altra lista. Nell'esempio seguente il quarto elemento della lista (elemento numero 3 dato che il primo ha indice 0)
Liste di Liste Matrici Una lista annidata è una lista che compare come elemento di un'altra lista. Nell'esempio seguente il quarto elemento della lista (elemento numero 3 dato che il primo ha indice 0)
Corso di Visione Artificiale. Texture. Samuel Rota Bulò
 Corso di Visione Artificiale Texture Samuel Rota Bulò Texture Le texture sono facili da riconoscere ma difficili da definire. Texture Il fatto di essere una texture dipende dal livello di scala a cui si
Corso di Visione Artificiale Texture Samuel Rota Bulò Texture Le texture sono facili da riconoscere ma difficili da definire. Texture Il fatto di essere una texture dipende dal livello di scala a cui si
Esercitazione 4: Filters
 Laboratorio di Immagini Esercitazione 4: Filters Mauro Zucchelli 07/04/2016 AVVISO Settimana prossima lezione sospesa! Riprendiamo dall ultima volta Abbiamo visto cosa rappresenta la trasformata di Fourier
Laboratorio di Immagini Esercitazione 4: Filters Mauro Zucchelli 07/04/2016 AVVISO Settimana prossima lezione sospesa! Riprendiamo dall ultima volta Abbiamo visto cosa rappresenta la trasformata di Fourier
Restauro di immagini. Prof. Filippo Stanco. Multimedia
 Restauro di immagini Prof. Filippo Stanco Restauro di immagini Il principale obiettivo delle tecniche di restauro è quello di rendere migliore un immagine cercando di ripristinarne il contenuto informativo
Restauro di immagini Prof. Filippo Stanco Restauro di immagini Il principale obiettivo delle tecniche di restauro è quello di rendere migliore un immagine cercando di ripristinarne il contenuto informativo
Corso di Visione Artificiale. Filtri parte II. Samuel Rota Bulò
 Corso di Visione Artificiale Filtri parte II Samuel Rota Bulò Numeri complessi parte reale parte immaginaria in coordinate polari complesso coniugato formula di Eulero Trasformata di Fourier discreta (DFT)
Corso di Visione Artificiale Filtri parte II Samuel Rota Bulò Numeri complessi parte reale parte immaginaria in coordinate polari complesso coniugato formula di Eulero Trasformata di Fourier discreta (DFT)
Moltiplicazione. Divisione. Multipli e divisori
 Addizione Sottrazione Potenze Moltiplicazione Divisione Multipli e divisori LE QUATTRO OPERAZIONI Una operazione aritmetica è quel procedimento che fa corrispondere ad una coppia ordinata di numeri (termini
Addizione Sottrazione Potenze Moltiplicazione Divisione Multipli e divisori LE QUATTRO OPERAZIONI Una operazione aritmetica è quel procedimento che fa corrispondere ad una coppia ordinata di numeri (termini
Luigi Piroddi
 Automazione industriale dispense del corso (a.a. 2008/2009) 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul
Automazione industriale dispense del corso (a.a. 2008/2009) 10. Reti di Petri: analisi strutturale Luigi Piroddi piroddi@elet.polimi.it Analisi strutturale Un alternativa all analisi esaustiva basata sul
Elaborazione delle immagini a basso livello
 Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Sommario Introduzione Percezione Formazione delle immagini Estrazione di informazione 3D da un immagine Riconoscimento di oggetti Manipolazione e navigazione Conclusioni 128 La luce riflessa dagli oggetti
Sistemi lineari. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Sistemi lineari Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utenti.unife.it/lorenzo.pareschi/ lorenzo.pareschi@unife.it Lorenzo Pareschi (Univ. Ferrara)
Rango di una matrice e teorema di Rouché-Capelli
 Rango di una matrice e teorema di Rouché-Capelli Sappiamo che a una matrice m n, A, è associata l applicazione lineare L A : R n R m, L A (X) = AX, X R n. Definizione 1. Lo spazio nullo di A, N (A), è
Rango di una matrice e teorema di Rouché-Capelli Sappiamo che a una matrice m n, A, è associata l applicazione lineare L A : R n R m, L A (X) = AX, X R n. Definizione 1. Lo spazio nullo di A, N (A), è
Esercizi svolti. delle matrici
 Esercizi svolti. astratti. Si dica se l insieme delle coppie reali (x, y) soddisfacenti alla relazione x + y è un sottospazio vettoriale di R La risposta è sì, perchè l unica coppia reale che soddisfa
Esercizi svolti. astratti. Si dica se l insieme delle coppie reali (x, y) soddisfacenti alla relazione x + y è un sottospazio vettoriale di R La risposta è sì, perchè l unica coppia reale che soddisfa
LEZIONE 3. a + b + 2c + e = 1 b + d + g = 0 3b + f + 3g = 2. a b c d e f g
 LEZIONE 3 3.. Matrici fortemente ridotte per righe. Nella precedente lezione abbiamo introdotto la nozione di soluzione di un sistema di equazioni lineari. In questa lezione ci poniamo il problema di descrivere
LEZIONE 3 3.. Matrici fortemente ridotte per righe. Nella precedente lezione abbiamo introdotto la nozione di soluzione di un sistema di equazioni lineari. In questa lezione ci poniamo il problema di descrivere
Progetto Matlab N 2. Calcolo Numerico 6 CFU. Corso di Laurea in Ingegneria delle Comunicazioni 31/05/2014
 Progetto Matlab N 2 Calcolo Numerico 6 CFU Corso di Laurea in Ingegneria delle Comunicazioni 31/05/2014 Procedimento 1. Scrivere una function che implementi il prodotto matrice-vettore AX con A matrice
Progetto Matlab N 2 Calcolo Numerico 6 CFU Corso di Laurea in Ingegneria delle Comunicazioni 31/05/2014 Procedimento 1. Scrivere una function che implementi il prodotto matrice-vettore AX con A matrice
Note per il corso di Geometria Corso di laurea in Ing. Edile/Architettura. 4 Sistemi lineari. Metodo di eliminazione di Gauss Jordan
 Note per il corso di Geometria 2006-07 Corso di laurea in Ing. Edile/Architettura Sistemi lineari. Metodo di eliminazione di Gauss Jordan.1 Operazioni elementari Abbiamo visto che un sistema di m equazioni
Note per il corso di Geometria 2006-07 Corso di laurea in Ing. Edile/Architettura Sistemi lineari. Metodo di eliminazione di Gauss Jordan.1 Operazioni elementari Abbiamo visto che un sistema di m equazioni
Cenno al trattamento delle immagini digitali. Cartografia numerica e GIS Domenico Sguerso
 Cenno al trattamento delle immagini digitali Cartografia numerica e GIS Domenico Sguerso Digital Image Processing: Preprocessing (Memorizzazione) analysis Trattamento dell immagine: - ricampionamento necessario
Cenno al trattamento delle immagini digitali Cartografia numerica e GIS Domenico Sguerso Digital Image Processing: Preprocessing (Memorizzazione) analysis Trattamento dell immagine: - ricampionamento necessario
Analogico vs. Digitale. LEZIONE II La codifica binaria. Analogico vs digitale. Analogico. Digitale
 Analogico vs. Digitale LEZIONE II La codifica binaria Analogico Segnale che può assumere infiniti valori con continuità Digitale Segnale che può assumere solo valori discreti Analogico vs digitale Il computer
Analogico vs. Digitale LEZIONE II La codifica binaria Analogico Segnale che può assumere infiniti valori con continuità Digitale Segnale che può assumere solo valori discreti Analogico vs digitale Il computer
Image segmentation. Elaborazione intermedia
 Image segmentation Edge detection Elaborazione intermedia elaborazione intermedia si occupa di ottenere una descrizione signiicativa della scena mediante la segmentazione suddivisione della immagine in
Image segmentation Edge detection Elaborazione intermedia elaborazione intermedia si occupa di ottenere una descrizione signiicativa della scena mediante la segmentazione suddivisione della immagine in
SCHEDA DIDATTICA N 7
 FACOLTA DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA CIVILE CORSO DI IDROLOGIA PROF. PASQUALE VERSACE SCHEDA DIDATTICA N 7 LA DISTRIBUZIONE NORMALE A.A. 01-13 La distribuzione NORMALE Uno dei più importanti
FACOLTA DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA CIVILE CORSO DI IDROLOGIA PROF. PASQUALE VERSACE SCHEDA DIDATTICA N 7 LA DISTRIBUZIONE NORMALE A.A. 01-13 La distribuzione NORMALE Uno dei più importanti
Elaborazione delle immagini
 Dipartimento di Fisica a.a. 4/5 Fisica Medica Elaborazione delle immagini 5/4/5 Processamento Una mappatura di tipo esponenziale mostra un immagine del tipo Intensità d uscita Intensità in entrata L =
Dipartimento di Fisica a.a. 4/5 Fisica Medica Elaborazione delle immagini 5/4/5 Processamento Una mappatura di tipo esponenziale mostra un immagine del tipo Intensità d uscita Intensità in entrata L =
Statistica Elementare
 Statistica Elementare 1. Frequenza assoluta Per popolazione si intende l insieme degli elementi che sono oggetto di una indagine statistica, ovvero l insieme delle unità, dette unità statistiche o individui
Statistica Elementare 1. Frequenza assoluta Per popolazione si intende l insieme degli elementi che sono oggetto di una indagine statistica, ovvero l insieme delle unità, dette unità statistiche o individui
Operazioni tra matrici. Moltiplicazione per uno Scalare Moltiplicare ogni elemento della matrice per lo scalare. Sia c = 3
 Operazioni tra matrici Definizione di matrice a ij è un elemento di A a ij è detto l elemento ij-esimo di A Moltiplicazione per uno Scalare Moltiplicare ogni elemento della matrice per lo scalare. Sia
Operazioni tra matrici Definizione di matrice a ij è un elemento di A a ij è detto l elemento ij-esimo di A Moltiplicazione per uno Scalare Moltiplicare ogni elemento della matrice per lo scalare. Sia
Equazioni. Istituto San Gabriele 3 Liceo Scientifico 3 Liceo Scientifico sez. Scienze Applicate A.S. 2016/2017 Prof.
 Equazioni Istituto San Gabriele 3 Liceo Scientifico 3 Liceo Scientifico sez. Scienze Applicate A.S. 2016/2017 Prof. Andrea Pugliese Definizione ed esempi Un equazione è un uguaglianza tra due espressioni
Equazioni Istituto San Gabriele 3 Liceo Scientifico 3 Liceo Scientifico sez. Scienze Applicate A.S. 2016/2017 Prof. Andrea Pugliese Definizione ed esempi Un equazione è un uguaglianza tra due espressioni
F. Milotta Ph.D. Student
 F. Milotta Ph.D. Student milotta@dmi.unict.it Le immagini digitali Rappresentazione delle immagini digitali Luce incidente e luce riflessa Immagini vettoriali e raster Operazioni affini sulle immagini
F. Milotta Ph.D. Student milotta@dmi.unict.it Le immagini digitali Rappresentazione delle immagini digitali Luce incidente e luce riflessa Immagini vettoriali e raster Operazioni affini sulle immagini
FISICA APPLICATA 2 FENOMENI ONDULATORI - 1
 FISICA APPLICATA 2 FENOMENI ONDULATORI - 1 DOWNLOAD Il pdf di questa lezione (onde1.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 08/10/2012 FENOMENI ONDULATORI Una classe di fenomeni
FISICA APPLICATA 2 FENOMENI ONDULATORI - 1 DOWNLOAD Il pdf di questa lezione (onde1.pdf) è scaricabile dal sito http://www.ge.infn.it/ calvini/tsrm/ 08/10/2012 FENOMENI ONDULATORI Una classe di fenomeni
Capitolo 3 Matrici. Marco Robutti. Facoltà di ingegneria Università degli studi di Pavia. Anno accademico
 Capitolo 3 Matrici Marco Robutti Facoltà di ingegneria Università degli studi di Pavia Anno accademico 2017-2018 Tutorato di geometria e algebra lineare Definizione (Matrice) Una matrice A M R (k, n) è
Capitolo 3 Matrici Marco Robutti Facoltà di ingegneria Università degli studi di Pavia Anno accademico 2017-2018 Tutorato di geometria e algebra lineare Definizione (Matrice) Una matrice A M R (k, n) è
APPUNTI PER IL CORSO DI MATEMATICA APPLICATA. 1. Lezione 1 Richiamo brevemente alcune notazioni della teoria degli insiemi.
 APPUNTI PER IL CORSO DI MATEMATICA APPLICATA ERNESTO DE VITO - UNIVERSITÀ DI GENOVA, ITALY 1. Lezione 1 Richiamo brevemente alcune notazioni della teoria degli insiemi. insieme vuoto N insieme dei numeri
APPUNTI PER IL CORSO DI MATEMATICA APPLICATA ERNESTO DE VITO - UNIVERSITÀ DI GENOVA, ITALY 1. Lezione 1 Richiamo brevemente alcune notazioni della teoria degli insiemi. insieme vuoto N insieme dei numeri
(1;1) y=2x-1. Fig. G4.1 Retta tangente a y=x 2 nel suo punto (1;1).
 y=2x-1. Fig. G4.1 Retta tangente a y=x 2 nel suo punto (1;1).") G4 Derivate G4 Significato geometrico di derivata La derivata di una funzione in un suo punto è il coefficiente angolare della sua retta tangente Esempio G4: La funzione = e la sua retta tangente per il
G4 Derivate G4 Significato geometrico di derivata La derivata di una funzione in un suo punto è il coefficiente angolare della sua retta tangente Esempio G4: La funzione = e la sua retta tangente per il
Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari
 Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017 Elementi di Algebra Lineare
Elementi di Algebra Lineare Matrici e Sistemi di Equazioni Lineari Antonio Lanteri e Cristina Turrini UNIMI - 2016/2017 Antonio Lanteri e Cristina Turrini (UNIMI - 2016/2017 Elementi di Algebra Lineare
FACOLTA DI INGEGNERIA INGEGNERIA INFORMATICA A.A. 2008/2009. Corso VISIONE E PERCEZIONE. Docente. Prof. FIORA PIRRI. Tutor MATIA PIZZOLI
 FACOLTA DI INGEGNERIA INGEGNERIA INFORMATICA A.A. 2008/2009 Corso VISIONE E PERCEZIONE Docente Prof. FIORA PIRRI Tutor MATIA PIZZOLI MAPPA DI DISPARITA Studente Redjan Shabani (1013173) 0 Definizione di
FACOLTA DI INGEGNERIA INGEGNERIA INFORMATICA A.A. 2008/2009 Corso VISIONE E PERCEZIONE Docente Prof. FIORA PIRRI Tutor MATIA PIZZOLI MAPPA DI DISPARITA Studente Redjan Shabani (1013173) 0 Definizione di
Si noti che la matrice trasposta A ha lo stesso determinante. Questa proprietà è generale;
 Ottavio Serra Matrici e determinanti In questa nota estenderemo a matrici quadrate di ordine n qualsiasi il concetto di determinante introdotto nelle scuole secondarie per matrici di ordine 2 come tecnica
Ottavio Serra Matrici e determinanti In questa nota estenderemo a matrici quadrate di ordine n qualsiasi il concetto di determinante introdotto nelle scuole secondarie per matrici di ordine 2 come tecnica
AL DI LA DELLE IMMAGINI
 AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
AL DI LA DELLE IMMAGINI Lucia Della Croce Giulia Maggi Ada Pulvirenti - Giuseppe Toscani Dipartimento di Matematica Università di Pavia Piano Lauree Scientifiche Broni - I. I. S. Faravelli 7 Dicembre 2010
Metodi per la risoluzione di sistemi lineari
 Metodi per la risoluzione di sistemi lineari Sistemi di equazioni lineari. Rango di matrici Come è noto (vedi [] sez.0.8), ad ogni matrice quadrata A è associato un numero reale det(a) detto determinante
Metodi per la risoluzione di sistemi lineari Sistemi di equazioni lineari. Rango di matrici Come è noto (vedi [] sez.0.8), ad ogni matrice quadrata A è associato un numero reale det(a) detto determinante
Sistema di riferimento cartesiano
 Sistema di riferimento cartesiano 007 Pasquale Terrecuso Tutti i diritti sono riservati. Sistema di riferimento cartesiano monodimensionale........................................................ 4 i versi...................................................................
Sistema di riferimento cartesiano 007 Pasquale Terrecuso Tutti i diritti sono riservati. Sistema di riferimento cartesiano monodimensionale........................................................ 4 i versi...................................................................
Trasformata wavelet. 1 Introduzione. 2 Filtri wavelet di Daubechies
 Trasformata wavelet Introduzione L pari della trasforamta di Fourier veloce (FFT), la trasformata wavelet discreta (DWT) è un operazione veloce e lineare che opera su un vettore di dati di lunghezza pari
Trasformata wavelet Introduzione L pari della trasforamta di Fourier veloce (FFT), la trasformata wavelet discreta (DWT) è un operazione veloce e lineare che opera su un vettore di dati di lunghezza pari
Lezione Sistemi di equazioni lineari
 Lezione. Sistemi di equazioni lineari Definizione. (Sistemi di equazioni lineari e loro soluzioni). Un equazione lineare nelle n incognite x,,...,x n acoefficientiink = R, èun equazionedellaforma a x +
Lezione. Sistemi di equazioni lineari Definizione. (Sistemi di equazioni lineari e loro soluzioni). Un equazione lineare nelle n incognite x,,...,x n acoefficientiink = R, èun equazionedellaforma a x +
MATRICI E SISTEMI LINEARI
 1 Rappresentazione di dati strutturati MATRICI E SISTEMI LINEARI Gli elementi di una matrice, detti coefficienti, possono essere qualsiasi e non devono necessariamente essere omogenei tra loro; di solito
1 Rappresentazione di dati strutturati MATRICI E SISTEMI LINEARI Gli elementi di una matrice, detti coefficienti, possono essere qualsiasi e non devono necessariamente essere omogenei tra loro; di solito
Richiami di Algebra Lineare
 Richiami di Algebra Lineare Fabrizio Silvestri December 14, 010 Matrice Sia R il campo dei numeri reali. Si indica con R m n l insieme delle matrici ad elementi reali con m righe ed n colonne. Se A R n
Richiami di Algebra Lineare Fabrizio Silvestri December 14, 010 Matrice Sia R il campo dei numeri reali. Si indica con R m n l insieme delle matrici ad elementi reali con m righe ed n colonne. Se A R n
1 Schemi alle differenze finite per funzioni di una variabile
 Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Introduzione In questa dispensa vengono forniti alcuni elementi di base per la soluzione di equazioni alle derivate parziali che governano problemi al contorno. A questo scopo si introducono, in forma
Valori Medi. Docente Dott.ssa Domenica Matranga
 Valori Medi Docente Dott.ssa Domenica Matranga Valori medi Medie analitiche - Media aritmetica - Media armonica - Media geometrica - Media quadratica Medie di posizione - Moda -Mediana - Quantili La media
Valori Medi Docente Dott.ssa Domenica Matranga Valori medi Medie analitiche - Media aritmetica - Media armonica - Media geometrica - Media quadratica Medie di posizione - Moda -Mediana - Quantili La media
Tecniche di restauro delle immagini digitali
 Tecniche di restauro delle immagini digitali Le principali fonti di rumore Le principali sorgenti di rumore nelle immagini digitali si presentano durante il processo di acquisizione e di trasmissione.
Tecniche di restauro delle immagini digitali Le principali fonti di rumore Le principali sorgenti di rumore nelle immagini digitali si presentano durante il processo di acquisizione e di trasmissione.
Geometria BAER I canale Foglio esercizi 2
 Geometria BAER I canale Foglio esercizi 2 Esercizio 1. Calcolare il determinante e l inversa (quando esiste) della matrice ( ) cos θ sin θ R θ =, θ [0, 2π] sin θ cos θ Soluzione: Il determinante ( é cos
Geometria BAER I canale Foglio esercizi 2 Esercizio 1. Calcolare il determinante e l inversa (quando esiste) della matrice ( ) cos θ sin θ R θ =, θ [0, 2π] sin θ cos θ Soluzione: Il determinante ( é cos
Lezione Settembre ore (Il concetto di funzione)
") Laurea in Scienze e Tecnologie Biomolecolari, anno accademico 2014/15 Corso di Matematica e Statistica I Lezione 2. 17 Settembre 2014 2 ore (Il concetto di funzione) Il concetto di funzione Dati gli insiemi
Laurea in Scienze e Tecnologie Biomolecolari, anno accademico 2014/15 Corso di Matematica e Statistica I Lezione 2. 17 Settembre 2014 2 ore (Il concetto di funzione) Il concetto di funzione Dati gli insiemi
Corso di Multimedia A.A 2013/2014
 Corso di Multimedia A.A 2013/2014 Un immagine è rappresentata da una funzione bidimensionale f(x,y). Il piano XY in cui stanno le coordinate dell immagine è detto DOMINIO SPAZIALE e le variabili x,y sono
Corso di Multimedia A.A 2013/2014 Un immagine è rappresentata da una funzione bidimensionale f(x,y). Il piano XY in cui stanno le coordinate dell immagine è detto DOMINIO SPAZIALE e le variabili x,y sono
MATRICI E SISTEMI LINEARI
 MATRICI E SISTEMI LINEARI - PARTE I - Felice Iavernaro Dipartimento di Matematica Università di Bari 27 Febbraio 2006 Felice Iavernaro (Univ. Bari) Matrici e Sistemi lineari 27/02/2006 1 / 1 Definizione
MATRICI E SISTEMI LINEARI - PARTE I - Felice Iavernaro Dipartimento di Matematica Università di Bari 27 Febbraio 2006 Felice Iavernaro (Univ. Bari) Matrici e Sistemi lineari 27/02/2006 1 / 1 Definizione
APPUNTI SULLA DIAGONALIZZAZIONE Corso Prof. F.Podestà, a.a
 APPUNTI SULLA DIAGONALIZZAZIONE Corso Prof FPodestà, aa 003-004 Sia V uno spazio vettoriale e sia f : V V una applicazione lineare una tale applicazione da uno spazio vettoriale in se stesso è chiamata
APPUNTI SULLA DIAGONALIZZAZIONE Corso Prof FPodestà, aa 003-004 Sia V uno spazio vettoriale e sia f : V V una applicazione lineare una tale applicazione da uno spazio vettoriale in se stesso è chiamata
Appunti di matematica per le Scienze Sociali Parte 1
 Appunti di matematica per le Scienze Sociali Parte 1 1 Equazioni 1.1 Definizioni preliminari 1.1.1 Monomi Si definisce monomio ogni prodotto indicato di fattori qualsiasi, cioè uguali o diseguali, numerici
Appunti di matematica per le Scienze Sociali Parte 1 1 Equazioni 1.1 Definizioni preliminari 1.1.1 Monomi Si definisce monomio ogni prodotto indicato di fattori qualsiasi, cioè uguali o diseguali, numerici
Algebra matriciale. Un algebra è un sistema di segni in cui sono definite delle operazioni Algebra scalare Algebra dei vettori Algebra matriciale
 Algebra matriciale Algebra Un algebra è un sistema di segni in cui sono definite delle operazioni Algebra scalare Algebra dei vettori Algebra matriciale In algebra matriciale un numero è chiamato scalare
Algebra matriciale Algebra Un algebra è un sistema di segni in cui sono definite delle operazioni Algebra scalare Algebra dei vettori Algebra matriciale In algebra matriciale un numero è chiamato scalare
Analisi Numerica. Debora Botturi ALTAIR. Debora Botturi. Laboratorio di Sistemi e Segnali
 Analisi Numerica ALTAIR http://metropolis.sci.univr.it Argomenti Argomenti Argomenti Rappresentazione di sistemi con variabili di stato; Tecniche di integrazione numerica Obiettivo: risolvere sistemi di
Analisi Numerica ALTAIR http://metropolis.sci.univr.it Argomenti Argomenti Argomenti Rappresentazione di sistemi con variabili di stato; Tecniche di integrazione numerica Obiettivo: risolvere sistemi di
Metodi per la risoluzione di sistemi lineari
 Metodi per la risoluzione di sistemi lineari 1 Sistemi di equazioni lineari 1.1 Determinante di matrici quadrate Ad ogni matrice quadrata A è associato un numero reale det(a) detto determinante della matrice
Metodi per la risoluzione di sistemi lineari 1 Sistemi di equazioni lineari 1.1 Determinante di matrici quadrate Ad ogni matrice quadrata A è associato un numero reale det(a) detto determinante della matrice
N.B. Per la risoluzione dei seguenti esercizi, si fa riferimento alle Tabelle riportate alla fine del documento.
 N.B. Per la risoluzione dei seguenti esercizi, si fa riferimento alle Tabelle riportate alla fine del documento. Esercizio 1 Un chimico che lavora per una fabbrica di batterie, sta cercando una batteria
N.B. Per la risoluzione dei seguenti esercizi, si fa riferimento alle Tabelle riportate alla fine del documento. Esercizio 1 Un chimico che lavora per una fabbrica di batterie, sta cercando una batteria
Filtraggio nel Dominio della Frequenza
 Filtraggio nel Dominio della Frequenza Parte 2 Filtro di enfasi ad alta frequenza Solitamente i filtri passa alto riducono a zero il termine dc, dunque riducono l intensità media nell immagine filtrata
Filtraggio nel Dominio della Frequenza Parte 2 Filtro di enfasi ad alta frequenza Solitamente i filtri passa alto riducono a zero il termine dc, dunque riducono l intensità media nell immagine filtrata
0.6 Filtro di smoothing Gaussiano
 2 Figura 7: Filtro trapezoidale passa basso. In questo filtro l rappresenta la frequenza di taglio ed l, l rappresenta un intervallo della frequenza con variazione lineare di H, utile ad evitare le brusche
2 Figura 7: Filtro trapezoidale passa basso. In questo filtro l rappresenta la frequenza di taglio ed l, l rappresenta un intervallo della frequenza con variazione lineare di H, utile ad evitare le brusche
Introduzione a Matlab
 Introduzione a Matlab Filtri: Media, Gaussiano, Mediano Fondamenti di Visione Artificiale a.a. 2015/2016 07/04/16 Introduzione a Matlab 1 Definizione di un filtro: Kernel Ciascun filtro è definito dal
Introduzione a Matlab Filtri: Media, Gaussiano, Mediano Fondamenti di Visione Artificiale a.a. 2015/2016 07/04/16 Introduzione a Matlab 1 Definizione di un filtro: Kernel Ciascun filtro è definito dal
CORSO DI STATISTICA (parte 1) - ESERCITAZIONE 3
 - ESERCITAZIONE 3") CORSO DI STATISTICA (parte 1) - ESERCITAZIONE 3 Dott.ssa Antonella Costanzo a.costanzo@unicas.it Esercizio 1. Sintesi a cinque e misure di variabilità rispetto ad un centro Una catena di fast-food ha selezionato
CORSO DI STATISTICA (parte 1) - ESERCITAZIONE 3 Dott.ssa Antonella Costanzo a.costanzo@unicas.it Esercizio 1. Sintesi a cinque e misure di variabilità rispetto ad un centro Una catena di fast-food ha selezionato
REGRESSIONE E CORRELAZIONE
 REGRESSIONE E CORRELAZIONE Nella Statistica, per studio della connessione si intende la ricerca di eventuali relazioni, di dipendenza ed interdipendenza, intercorrenti tra due variabili statistiche 1.
REGRESSIONE E CORRELAZIONE Nella Statistica, per studio della connessione si intende la ricerca di eventuali relazioni, di dipendenza ed interdipendenza, intercorrenti tra due variabili statistiche 1.
Lezione 4 1. Introduzione
 Lezione 4 1 Introduzione Le curve di domanda ed offerta servono per determinare possibili scenari futuri in seguito a cambiamenti delle condizioni. Ad esempio, la diminuzione della offerta di petrolio
Lezione 4 1 Introduzione Le curve di domanda ed offerta servono per determinare possibili scenari futuri in seguito a cambiamenti delle condizioni. Ad esempio, la diminuzione della offerta di petrolio
Daniela Lera A.A
 Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2016-2017 Richiami Algebra Lineare Spazio normato Uno spazio lineare X si dice normato se esiste una funzione
Daniela Lera Università degli Studi di Cagliari Dipartimento di Matematica e Informatica A.A. 2016-2017 Richiami Algebra Lineare Spazio normato Uno spazio lineare X si dice normato se esiste una funzione
Compiti tematici dai capitoli 2,3,4
 Compiti tematici dai capitoli 2,3,4 a cura di Giovanni M. Marchetti 2016 ver. 0.8 1. In un indagine recente, i rispondenti sono stati classificati rispetto al sesso, lo stato civile e l area geografica
Compiti tematici dai capitoli 2,3,4 a cura di Giovanni M. Marchetti 2016 ver. 0.8 1. In un indagine recente, i rispondenti sono stati classificati rispetto al sesso, lo stato civile e l area geografica
Lezione 3: Elaborazione delle immagini (2)
") Lezione 3: Elaborazione delle immagini (2) Informatica e Produzione Multimediale Docente: Umberto Castellani Filtraggio di immagini Filtrare un immagine significa eseguire alcune operazioni in modo da
Lezione 3: Elaborazione delle immagini (2) Informatica e Produzione Multimediale Docente: Umberto Castellani Filtraggio di immagini Filtrare un immagine significa eseguire alcune operazioni in modo da
Un modello computazionale per la detezione dei bordi
 Modelli e Principi della Percezione Data: AA 2010-11 Un modello computazionale per la detezione dei bordi Docente: Prof. Giuseppe Boccignone Scriba: 1 Il problema Il problema della modellazione di un processo
Modelli e Principi della Percezione Data: AA 2010-11 Un modello computazionale per la detezione dei bordi Docente: Prof. Giuseppe Boccignone Scriba: 1 Il problema Il problema della modellazione di un processo
Vettori e matrici. Lorenzo Pareschi. Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara
 Vettori e matrici Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utentiunifeit/lorenzopareschi/ lorenzopareschi@unifeit Lorenzo Pareschi Univ Ferrara
Vettori e matrici Lorenzo Pareschi Dipartimento di Matematica & Facoltá di Architettura Universitá di Ferrara http://utentiunifeit/lorenzopareschi/ lorenzopareschi@unifeit Lorenzo Pareschi Univ Ferrara
Introduzione alla Matematica per le Scienze Sociali - parte II
 Introduzione alla Matematica per le Scienze Sociali - parte II Lucrezia Fanti Istituto Nazionale per l Analisi delle Politiche Pubbliche (INAPP) lucrezia.fanti@uniroma1.it Lucrezia Fanti Intro Matematica
Introduzione alla Matematica per le Scienze Sociali - parte II Lucrezia Fanti Istituto Nazionale per l Analisi delle Politiche Pubbliche (INAPP) lucrezia.fanti@uniroma1.it Lucrezia Fanti Intro Matematica
Numeri e operazioni su di essi
 Numeri e operazioni su di essi Paolo Montanari Appunti di Matematica Numeri 1 Classificazione dei numeri Il primo obiettivo che ci si pone è quello di classificare i numeri, cioè conoscere i differenti
Numeri e operazioni su di essi Paolo Montanari Appunti di Matematica Numeri 1 Classificazione dei numeri Il primo obiettivo che ci si pone è quello di classificare i numeri, cioè conoscere i differenti
Un monomio è in forma normale se è il prodotto di un solo fattore numerico e di fattori letterali con basi diverse. Tutto quanto sarà detto di
 DEFINIZIONE Espressione algebrica costituita dal prodotto tra una parte numerica (coefficiente) e una o più variabili e/o costanti (parte letterale). Variabili e costanti possono comparire elevate a potenza
DEFINIZIONE Espressione algebrica costituita dal prodotto tra una parte numerica (coefficiente) e una o più variabili e/o costanti (parte letterale). Variabili e costanti possono comparire elevate a potenza
Trasformata di Fourier
 Trasformata di Fourier Filtri lineari Filtri lineari Gli operatori locali che operano su una immagine mediante la convoluzione con maschere di pesi possono essere descritti mediante la teoria dei segnali
Trasformata di Fourier Filtri lineari Filtri lineari Gli operatori locali che operano su una immagine mediante la convoluzione con maschere di pesi possono essere descritti mediante la teoria dei segnali
Richiami di statistica e loro applicazione al trattamento di osservazioni topografiche e geodetiche
 Richiami di statistica e loro applicazione al trattamento di osservazioni topografiche e geodetiche Ludovico Biagi Politecnico di Milano, DIIAR ludovico.biagi@polimi.it (materiale didattico preparato in
Richiami di statistica e loro applicazione al trattamento di osservazioni topografiche e geodetiche Ludovico Biagi Politecnico di Milano, DIIAR ludovico.biagi@polimi.it (materiale didattico preparato in
Introduzione agli Algoritmi 4. Problemi. Dal Problema alla Soluzione
 Sommario Problemi e soluzioni Definizione informale di algoritmo e esempi Proprietà degli algoritmi Input/Output, Variabili Algoritmi senza input o output 1 2 Problema Definizione (dal De Mauro Paravia):
Sommario Problemi e soluzioni Definizione informale di algoritmo e esempi Proprietà degli algoritmi Input/Output, Variabili Algoritmi senza input o output 1 2 Problema Definizione (dal De Mauro Paravia):
ALGEBRA LINEARE E GEOMETRIA: ESERCIZI 5. Indice. 2. Esercizi 5
 ALGEBRA LINEARE E GEOMETRIA: ESERCIZI 5 Indice 1. Principali definizioni 1 2. Esercizi 5 Operazioni con le matrici 1. Principali definizioni Ricordiamo le principali definizioni legate alle matrici a coefficienti
ALGEBRA LINEARE E GEOMETRIA: ESERCIZI 5 Indice 1. Principali definizioni 1 2. Esercizi 5 Operazioni con le matrici 1. Principali definizioni Ricordiamo le principali definizioni legate alle matrici a coefficienti
APPLICAZIONI. Im f = {b B a A tale che f (a) = b}.
 = b}.") APPLICAZIONI Diremo applicazione (o funzione) da un insieme A ad un insieme B una legge f che associa ad ogni elemento a A uno ed un solo elemento b B. Scriviamo f : A B e il corrispondente o immagine
APPLICAZIONI Diremo applicazione (o funzione) da un insieme A ad un insieme B una legge f che associa ad ogni elemento a A uno ed un solo elemento b B. Scriviamo f : A B e il corrispondente o immagine
Metodo dei Minimi Quadrati. Dott. Claudio Verona
 Metodo dei Minimi Quadrati Dott. Claudio Verona E in generale interessante studiare l andamento di una variabile in funzione di un altra e capire se c è una funzione matematica che le lega. Viceversa è
Metodo dei Minimi Quadrati Dott. Claudio Verona E in generale interessante studiare l andamento di una variabile in funzione di un altra e capire se c è una funzione matematica che le lega. Viceversa è