Quaderno delle esercitazioni A.A. 2018/2019 Federico Zullo
|
|
|
- Marisa Tucci
- 4 anni fa
- Visualizzazioni
Transcript
1 Federico Zullo DICATAM, Università di Brescia Indirizzo: via Valotti 9 (piano terra), Brescia. federico.zullo@unibs.it federico-zullo.unibs.it
2 NOTA BENE: Il presente materiale è una raccolta degli esercizi svolti in classe. Per un adeguata preparazione è necessario un approfondimento e completamento dei temi trattati tramite un lavoro autonomo di teoria ed esercizi. 21/02/ Dati i vettori nel piano u = î1 + 2î2 e v = 2î1 + 3î2, determinare i loro moduli, le loro direzioni e i loro versi. 2. Un vettore nel piano (x, y) ha modulo pari 2 e forma un angolo pari a π/4 con l asse delle x. Determinare la sua rappresentazione cartesiana. 3. Scrivendo i vettori u e v come somma delle loro componenti cartesiane, mostrare che la definizione cartesiana di prodotto scalare è data da u v = u x v x + u y v y + u z v z. 4. Scrivendo i vettori u e v come somma delle loro componenti cartesiane, mostrare che la definizione cartesiana di prodotto vettoriale è data da u v = (u y v z u z v y, u z v x u x v z, u x v y u y v x ). 5. Dati i vettori u = î1 + 2î2 î3 e v = 3î1 2î2 + î3 determinare i vettori u + v, u v, u v, u v. 6. Verificare che i vettori v 1 = 2î1 î2 + 10î3 e v 2 = 3î1 + 6î2 sono perpendicolari, mentre i vettori u 1 = 2î1 î2 + î3 e u 2 = 4î1 2î2 + 2î3 sono paralleli. 7. Dimostrare il teorema di Carnot: in ogni triangolo, il quadrato della misura di un lato è pari alla somma dei quadrati delle misure degli altri due lati, meno il loro doppio prodotto moltiplicato per il coseno dell angolo tra essi compreso. 8. Calcolare la derivata prima e seconda della seguente funzione vettoriale u(ξ) = 3ξ 3 î 1 + ξ 2 î 2 + 4î3. 9. Verificare che il vettore u = cos(2t)î1 + sin(2t)î2 ha modulo costante. Successivamente calcolare la derivata di u rispetto a t e verificare che du e u sono ortogonali. Infine dt verificare che u du = c, dove c è un vettore costante. dt 10. Un punto si muove su una circonferenza di raggio R. La sua posizione è descritta in ogni istante t dalla curva x(t) = R cos(αt)î1+r sin(αt)î2, dove α è una costante. Verificare che la terna intrinseca è data da T = sin ( ) s î1 + cos ( ) s î2, N = cos ( ) s î1 sin ( s R R R R) î2, B = î Dato il sistema di vettori piani e paralleli (v 1, A 1 ) e (v 2, A 2 ): con v 1, determinare v 1 = (0, 1, 0), v 2 = (0, v, 0), A 1 = (1, 2, 0), A 2 = (2, 1, 0),
3 Figura 1: Risultante e momento risultante rispetto all origine. Invariante scalare. Equazione cartesiana dell asse centrale. Valore del momento rispetto ad un punto dell asse centrale. Un sistema equivalente. 12. Determinare l equazione dell asse centrale per il sistema di vettori paralleli v k = (0, 0, k) applicati in A k = (0, k, 0), k = 1..N. 13. Determinare l equazione dell asse centrale per un sistema di vettori paralleli v k = a kˆv applicati nei punti A k, k = 1..N. Verificare che esiste un punto C che giace sull asse centrale qualsiasi sia l orientazione comune dei vettori v. 28/02/ Applicando la definizione di velocità areale, mostrare che l area del cerchio diraggio R è πr Applicando la definizione di velocità areale, mostrare che l area dell ellisse è πab, dove a e b sono i semiassi dell ellisse. 3. Un punto P si muove su un piano con velocità costante in modulo e con velocità radiale, rispetto ad un punto fisso O, anch essa costante in modulo. Determinare l accelerazione e la traiettoria del punto. 4. Determinare coordinate, velocità e accelerazione dei punti A e B in figura (1) in funzione della coordinata θ. I due punti sono tenuti da un filo lungo l, mentre i pioli neri sono fissi a distanza d. Il punto A può scorrere senza attrito lungo la circonferenza (fissa anch essa). Si assuma θ (0, π/2). 5. Una semicirconferenza di centro C e raggio R ha gli estremi del diametro orizzontale vincolati a scorrere con velocità costante u lungo una guida (orizzontale anch essa). A t = 0 l estremo sinistro A coincide con l origine O. Determinare
. Determina i gradi di libertà del sistema e le configurazioni dei punti dell asta tramite opportune coordinate lagrangiane.")
4 Figura 2: le coordinate, la velocità e l accelerazione dei punti della circonferenza. le coordinate, la velocità e l accelerazione di un punto mobile sulla circonferenza. 6. Un asta rigida di lunghezza 2L è vincolata a giacere sul paino (x, y). Determina i gradi di libertà del sistema e le configurazioni dei punti dell asta tramite opportune coordinate lagrangiane. Determina successivamente velocità e accelerazione di un arbitrario punto P dell asta in funzione delle coordinate lagrangiane. 7. Una lamina rettangolare ABCD di lati AB = CD = a, BC = AD = b è vincolata a giacere sul piano (x, y) e ad avere il lato AB sull asse y = tan(θ)x, giacendo sul semipiano superiore rispetto all asse. Determina i gradi di libertà del sistema e le configurazioni dei punti della lamina tramite opportune coordinate lagrangiane. 8. Un disco di raggio R è vincolato a rotolare senza strisciare sull asse x. Si determini la traiettoria di un punto P sul bordo del disco. 07/03/ Parametrizzare tramite gli angoli di Eulero (in figura 2) i coseni direttori degli assi solidali ad un corpo rigido rispetto ad un sistema di riferimento fisso. 2. Un punto P si muove su una circonferenza di centro C e raggio R. La circonferenza ruota, nel piano Oxy, con velocià angolare ω intorno ad un punto fisso che coincide con un punto della circonferenza stessa. Al tempo t = 0 il punto C ha coordinate (R, 0, 0). Calcolare le coordinate del punto P, la sua velocità e la sua accelerazione.
5 Figura 3: 3. Un asta lunga 2L è vincolata a giacere nel piano Oxy, ha una estremità fissa in un punto (x 0, y 0 ) del piano e ruota con velocità angolare ω = φî3. Determinare lo stato cinetico dell asta. 4. Un asta lunga 2L è vincolata a giacere nel piano Oxy e ruota con velocità angolare ω = φî3 intorno ad un asse passante per il suo centro. Determinare lo stato cinetico dell asta. 5. Un corpo rigido ruota intorno ad un asse fisso û con velocità angolare data da ω = (3t+t 2 )û. Determinare la velocità e l accelerazione di un punto P del corpo rigido posto a distanza d dall asse di rotazione. 6. Dal punto di vista puramente matematico, la legge di variazione dei momenti M P = M O + R (P O ) è formalmente analoga alla legge fondamentale della cinematica dei sistemi rigidi v P = v O + ω (P O ). Data questa analogia, stabilire, per un corpo rigido, nel caso ω 0, le seguenti affermazioni: L invariante scalare I = v P ω non dipende dal punto P del corpo rigido. Esiste una retta parallela ad ω i cui punti hanno velocità con modulo minimo. La velocità di questi punti è parallela ad ω. Trovare l equazione della retta. 7. Due aste, ognuna lunga L, sono vincolate tra loro a formare un doppio pendolo (si veda la figura 3). Determinare la velocità di un generico punto P sulla seconda asta. 8. Un asta AB di lunghezza L è vincolata in A a scorrere sull asse delle x, mentre un suo punto C, a distanza b da A, è vincolato a scorrere sull asse delle y. Determinare la traiettoria del punto B.
6 14/03/ Un punto P si muove, di moto uniforme, lungo una retta giacente nel piano (x, y) e passante per l origine. La retta è a sua volta uniformemente rotante intorno all asse determinato da î3. All istante t = 0 il punto ha coordinate (x 0, 0). Descrivere il moto assoluto e relativo (rispetto a un sistema rotante con la stessa origine di quello fisso) del punto P. 2. Un asta AB di lunghezza L ha gli estremi vincolati a scorrere senza attrito su due guide perpendicolari. Determinare l atto di moto ed il centro istantaneo di rotazione. 3. Un punto P è vincolato a muoversi su una parabola con la legge P O = (t, t 2 ). Il piano in cui giace la parabola ruota con velocità angolare ω. Al tempo t = 0 il sistema fisso e quello mobile coincidono. Determinare la velocità e l accelerazione relativi ad un sistema solidale con il piano, la velocità e l accelerazione di trascinamento del punto e l accelerazione di Coriolis del punto. 4. Un asta lunga 2L ha il centro C vincolato ad una circonferenza di raggio R. La circonferenza si muove di moto rettilineo uniforme con velocità v = vî 1. Al tempo t = 0 la circonferenza è nell origine del sistema di riferimento. Il centro C dell asta inoltre ruota sulla circonferenza con velocità angolare costante ω. Determinare: la velocità e l accelerazione di un punto P dell asta a distanza s dal centro C. il centro di istantanea rotazione dell asta 5. Un punto P è mobile su una guida inclinata di un angolo θ costante rispetto alla verticale. La guida ruota uniformemente intorno a tale asse. Calcolare velocità e accelerazione del punto. 6. Un punto P è mobile su una circonferenza di raggio r. Il centro della circonferenza a sua volta è mobile su una circonferenza di raggio R > r e centro nell origine del sistema fisso. Descrivere il moto del punto. 21/03/ Su un punto P di massa m agisce la forza posizionale ) F (x 1, x 2, x 3 ) = h (x 2 x 3 î 1 + x 1 x 3 î 2 + x 1 x 2 î 3, dove h è una costante. Determinare se la forza è conservativa e, nel caso affermativo, trovare il potenziale, l energia potenziale e l energia meccanica del punto P. Successivamente trovare il lavoro compiuto dalla forza F nello spostamento che va dal punto (0, 0, 0) al punto (a, a, a) lungo due percorsi differenti: il primo sulla retta x 1 = x 2 = x 3, il secondo dato dall unione dei percorsi sulla retta x 1 = x 2 = 0 e la retta x 3 = a, x 1 = x 2.
7 2. Dimostrare che tutte le forze centrali sono conservative e trovarne il potenziale. Determinare successivamente l energia meccanica di un punto P in un campo di forze centrali. Suggerimento: si ricordi che una forza centrale agente su un punto P è data dall espressione F = ρ(r) (P O), dove r = P O e ρ è una funzione che ammette una r primitiva. 3. Su un punto P di massa m agisce una forza elastica dovuta ad una molla con lunghezza a riposo pari ad l e costante elastica k. Il punto inizialmente si trova sull asse delle x a distanza x 0 dall origine. La sua velocità iniziale è pari a v 0 î 1. La molla collega il punto con l origine degli assi. Determinare: Il potenziale l energia meccanica le equazioni differenziali del moto. la soluzione delle equazioni differenziali del moto. l espressione dell energia meccanica in termini di m, v 0, x 0 e k. 4. Un punto P è vincolato a muoversi sull asse x 3. Su di esso agisce la forza peso ed una forza F diretta come î3 e di modulo pari a k (x 3 ) 2. Le condizioni iniziali sono date da x(0) = î3, v(0) = v 0 î 3. Determinare le equazioni differenziali del moto. Il potenziale a cui è soggetto il punto. l energia meccanica del punto. La quota massima e la quota minima raggiunta dal punto. 5. Calcolare la velocità minima con la quale si deve lanciare un oggetto affinchè esca dall attrazione gravitazionale terrestre. Questa velocità dipende dalla massa dell oggetto? Confronta successivamente il valore trovato con la velocità di entrata in atmosfera di un asteroide sulla Terra. 6. Un punto P si muove su un piano liscio. Al punto è applicata la forza F = 3yx 2 î 1 + (x 3 + y)î2. Verificare che la forza è conservativa, determinarne il potenziale e calcolare il lavoro effettuato dalla forza se il punto percorre l arco di una circonferenza di raggio R = 2, partendo dal punto (2,0) ed arrivando in (0,2). 7. Determinare il moto e la traiettoria di un proiettile nel vuoto soggetto alla forza peso ed ad una forza costante uguale a kî1 (k è una costante). Le condizioni iniziali sono x(0) = 0 e v(0) = (v 1, 0, v 3 ).
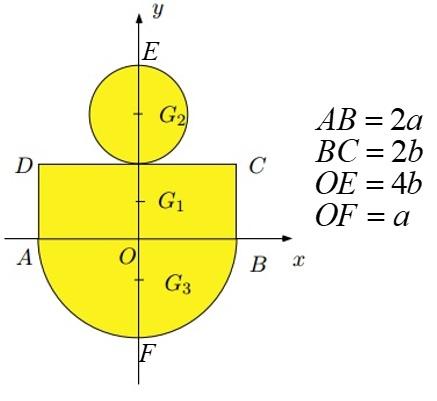
8 28/03/ Un punto materiale P è vincolato ad un piano orizzontale liscio. Esso è soggetto, oltre alla forza peso, ad una forza elastica pari a k(p O). Date le condizioni iniziali x(0) = (x 0, y 0 ) e v(0) = (v 1, v 2 ), determinare il moto del punto, la traiettoria e la reazione vincolare. 2. Un punto materiale P è appoggiato su un piano orizzontale liscio. Esso è soggetto, oltre alla forza peso, ad una forza elastica pari a k(p A), dove A è un punto sull asse î3 a distanza d dall origine. Date le condizioni iniziali x(0) = (x 0, y 0 ) e v(0) = (v 1, v 2 ), determinare il moto del punto e la reazione vincolare. Successivamente determinare il valore massimo di k per il quale non si ha il distacco del punto dal piano. 3. Un punto materiale P è appoggiato su un piano orizzontale liscio. Esso è soggetto, oltre alla forza peso, ad una forza elastica pari a k(p O), dove O è un punto del piano ed a una forza costante pari a F 0 î 3. Date le condizioni iniziali x(0) = (x 0, y 0 ) e v(0) = (v 1, v 2 ), determinare il moto del punto e la reazione vincolare. Successivamente determinare il valore massimo di F 0 per il quale non si ha il distacco del punto dal piano. 4. Un punto materiale P si muove su un piano inclinato liscio. Il piano ha un inclinazione di un angolo fisso α rispetto all orizzontale. Oltre alla forza peso, sul punto agisce una forza elastica pari a k(p O), dove O è un punto fisso sul piano inclinato. Determinare il moto del punto e la reazione vincolare. 5. Un punto P di massa m è poggiato sulla sommità di una semisfera liscia di raggio R. Esso viene messo in moto con una velocità v(0) = v 0 u, dove u è un versore tangente alla sfera sulla sua sommità. Determinare il punto di distacco di P ed il valore minimo da dare a v 0 affinchè il punto si stacchi immediatamente dalla sfera. 6. Un punto materiale P è vincolato ad una semicirconferenza liscia di raggio R. La circonferenza è varticale nel piano xy ed ha il diametro AB sull asse delle x. Sul punto agisce, oltre alla forza peso, una forza costante di modulo F 0 e diretta come P A. All istante iniziale il punto è in B e viene messo in moto con velocità v 0 î 2 dove î2 è il versore dell asse delle y e v 0 è una quantità positiva. Determinare la reazione vincolare. 04/04/ Un asta non omogenea AB di lunghezza L ha densità lineare data dalla legge ρ = ρ 0 (1+kx) dove x è la distanza di un punto dell asta da uno dei suoi estremi. Determinare il baricentro dell asta. 2. Determinare il baricentro delle lamine omogenee in figura (4) 3. Calcolare il baricentro dell arco di circonferenza in figura (5). Successivamente esprimere il risultato in termini dell angolo α intermedio tra ϕ 1 e ϕ 2 (introdurre gli angoli α e β tali che ϕ 1 = α β e ϕ 2 = α + β). Cosa si nota?

9 Figura 4: Figura 5: 4. Determinare il baricentro di un settore circolare omogeneo di raggio R e apertura 2α. Introdurre il riferimento cartesiano Oxy, con origine O nel centro del cerchio a cui appartiene il settore circolare e asse y coincidente con l asse di simmetria del settore. 5. Determinare il baricentro di un triangolo omogeneo i cui vertici, in un riferimento Oxy, hanno coordinate (0, 0), (a, 0), (b, c) Suggerimento: provare a risolvere l esercizio sia analiticamente (utilizzando la definizione di baricentro per una figura piana), che geometricamente (mostrando che il baricentro è il punto d incontro delle mediane). 6. Determinare il baricentro di un telaio triangolare omogeneo i cui vertici, in un riferimento Oxy, hanno coordinate (0, 0), (a, 0), (b, c) 7. Determinare il baricentro di un settore circolare omogeneo di raggio R e apertura 2α. Introdurre il riferimento cartesiano Oxy come in figura (6). 8. Determiare il baricentro di un disco omogeneo,di raggio R, con un foro circolare, di raggio R. Introdurre il riferimento cartesiano Oxy come in figura (7) Determinare il baricentro della lamina omogenea di massa m in figura (8).

10 Figura 6: Figura 7: Figura 8:
, (0, a, 0) e (0, 0, b). Determinare la matrice d inerzia del sistema. 2.")
11 Figura 9: 11/04/ Tre punti di massa m 1, m 2 e m 3 sono tenuti a distanza fissa da aste di massa trascurabile. In un sistema solidale le coordinate dei punti sono date rispettivamente da (0, a, 0), (0, a, 0) e (0, 0, b). Determinare la matrice d inerzia del sistema. 2. Determinare la matrice d inerzia per un asta AB omogenea di lunghezza l e massa m rispetto ad un sistema solidale con l origine nell estremità A, con l asta disposta lungo l asse ĵ Determinare la matrice d inerzia per un asta AB omogenea di lunghezza l e massa m rispetto ad un sistema solidale con l origine nel centro di massa, con l asta disposta lungo l asse ĵ 2 4. Determinare il momento di inerzia di un asta AB omogenea di lunghezza l e massa m rispetto ad un asse passante per il suo estremo A ed inclinato di un angolo α rispetto all asta AB. L asse giace nel piano Oyz. 5. Determinare la matrice d inerzia di una lamina rettangolare OABC rispetto ad un sistema solidale con origine nel vertice O e avente i lati OA = a ed OC = b rispettivamente sugli assi ĵ 2 ed ĵ Determinare la matrice d inerzia di una lamina rettangolare OABC rispetto ad un sistema solidale con origine nel baricentro e avente i lati AB = a e BC = b rispettivamente paralleli agli assi ĵ 2 ed ĵ Si consideri la lamina quadrata omogenea ABCD in figura (9) con il foro EF HI. Si determini il momento d inerzia rispetto al sistema solidale Oxyz. 8. Determinare la matrice d inerzia di un arco di circonferenza omogeneo AOB di apertura α rispetto ad un sistema solidale con origine nel centro della circonferenza a cui appartiene l arco e con l arco giacente nel piano (ĵ 2, ĵ 3 ). Si prenda la direzione OA giacente sull asse ĵ 2.
12 Figura 10: 9. Determinare la matrice d inerzia di un disco omogeneo rispetto ad un sistema solidale con origine nel centro del disco e con il disco giacente nel piano (ĵ 1, ĵ 2 ). 10. Determinare la matrice d inerzia di un disco omogeneo rispetto ad un sistema solidale con origine sul bordo del disco e con il disco giacente nel piano (ĵ 1, ĵ 2 ). Si prenda un diametro sull asse ĵ 1. 02/05/ Un disco omogeneo ruota intorno ad un asse fisso coincidente con un suo diametro. Il centro del disco rimane fisso sull asse. Determinare La quantità di moto totale del disco. Il momento della quantità di moto totale prendendo come polo il centro del disco. L energia cinetica del disco. 2. Un disco omogeneo ruota intorno ad un asse fisso coincidente con un suo diametro. Il centro del disco si sposta con velocità costante lungo l asse di rotazione. Determinare La quantità di moto totale del disco. Il momento della quantità di moto totale prendendo come polo il centro del disco. L energia cinetica del disco. 3. Risolvere lo stesso esercizio precedente supponendo che il disco ruoti intorno ad un asse fisso passante per il suo centro, con il disco perpendicolare all asse di rotazione. 4. Un disco omogeneo di massa m e raggio R rotola senza strisciare sull asse delle x (vedi figura (10)). Si calcoli l energia cinetica del disco. 5. Un sistema materiale è costituito da tre aste omogenee OA, OB ed OC perpendicolari tra loro (figura 11). Il sistema è incernierato in O in modo che l estremo C si mantenga
13 Figura 11: sull asse delle z. Il sistema ruota con velocità angolare uniforme w intorno all asse z. Determinare L energia cinetica del sistema. Il momento della quantità di moto totale rispetto al polo O. 6. Un asta omogenea di massa m e lunga 2L ha il centro C vincolato ad una circonferenza di raggio R. Sia l asta che la circonferenza sono vincolate sul piano (î 1, î 2 ). Il centro C dell asta ruota sulla circonferenza con velocità angolare costante ω. L asta si tiene tangente alla circonferenza. Determinare: La quantità di moto totale. L energia cinetica dell asta. 7. Un asta omogenea lunga 2L ha il centro C vincolato ad una circonferenza omogenea avente la stessa densità dell asta e raggio R. La circonferenza si muove di moto rettilineo uniforme con velocità v = vî 1. Sia l asta che la circonferenza sono vincolate sul piano (î 1, î 2 ). Il centro C dell asta inoltre ruota sulla circonferenza con velocità angolare costante ω. L asta si tiene tangente alla circonferenza. Determinare: La quantità di moto totale. L energia cinetica dell asta. 8. Si determini l energia cinetica di una lamina rettangolare ABCD, con i lati AB = a e BC = b, vincolata al paino (î 1, î 2 ) e che ruota con velocità angolare w = wî 3 intorno al punto fisso A.

14 Figura 12: 09/05/ In un piano Oxy, un asta AB di lunghezza 2L e massa m ha l estremo A scorrevole senza attrito sull asse x, mentre l estremo B è libero. Determinare le equazioni del moto tramite le equazioni cardinali gli integrali primi del moto le posizioni di equilibrio le reazioni vincolari all equilibrio le reazioni vincolari dinamiche in A. 2. In un piano verticale Oxy un disco omogeneo di raggio R e massa m ha un punto A del suo bordo scorrevole senza attrito sull asse delle x. Determinare le equazioni del moto tramite le equazioni cardinali gli integrali primi del moto le posizioni di equilibrio le reazioni vincolari all equilibrio le reazioni vincolari dinamiche in A. 3. In un piano verticale Oxy un disco omogeneo di massa m e raggio R è incerneriato in un punto del suo bordo all origine O. Sul punto A diametralmente opposto ad O è applicata la forza elastica F A = k(a A ) dove A è la proiezione di A sull asse delle x (si veda figura (12)). Il valore di k è pari a mg. I vincoli sono lisci. Determinare: 2R l equazione differenziale del moto tramite le equazioni cardinali. le posizioni di equilibrio del disco.
15 Figura 13: la reazione vincolare dinamica in O. la reazione vincolare statica in O. Un integrale primo del moto. 4. In un piano verticale Oxy si consideri un asta AB, omogenea e pesante, di massa m e lunghezza 2L, avente gli estremi A e B, rispettivamente, scorrevoli senza attrito sull asse x e sull asse y. Si chiede di determinare 16/05/2019 l equazione differenziale del moto tramite le equazioni cardinali. le reazioni vincolari dinamiche in A ed in B. le posizioni di equilibrio dell asta le reazioni vincolari all equilibrio in A e in B 1. Un sistema articolato è composto da due aste omogenee AB e BC di massa m 1 ed m 2. Le aste sono disposte in un piano verticale Oxy e sono incernierate nei punti A, B e C, come in figura (13) (arco a 3 cerniere). Sulla cerniera in B agisce una forza costante F diretta orizzontalmente, mentre sull asta BC agisce una coppia di momento costante Ω = Ωî 3. Determinare le reazioni vincolari esterne e le reazioni delle aste sulla cerniera in B nel caso in cui la massa m 2 sia trascurabile e le lunghezze AB ed AC siano rispettivamente l e 2l. 2. Si consideri il problema di un corpo rigido poggiato su n punti di appoggio. Utilizzando le equazioni cardinali della statica si dimostri che il sistema delle reazioni vincolari agli appoggi è staticamente indeterminato per n > 3. Si consideri poi il caso del trepiede (n = 3) e, nel caso in cui gli appoggi siano non allineati, si determini in quali condizioni il carico è uniformemente distribuito sugli appoggi. 3. Determinare le equazioni del moto di un corpo rigido libero sottoposto alla sola forza di gravità. Successivamente mostrare che una rotazione stazionaria (in cui cioè la velocità
16 angolare w è costante) è possibile, per corpi irregolari, solo se la rotazione avviene intorno ad uno dei tre assi principali d inerzia. 4. È possibile approssimare la Terra come un corpo rigido omogeneo a forma di sferoide oblato. Lo sferoide oblato si ottiene dalla rotazione di un ellisse di semiassi b e c intorno al suo asse verticale, di modo che la sua proiezione sul piano equatoriale è una circonferenza di raggio b, mentre la proiezione sul piano polare è un ellisse. Sapendo che il raggio della Terra all equatore è circa 6378Km, mentre il raggio al polo è circa 6357Km, e sapendo che nel sistema solidale Oxyz, dove O è il centro dello sferoide ed xy il piano equatoriale, i momenti principali d inerzia sono dati da I 1 = I 2 = 1 5 M(b2 + c 2 ) ed I 3 = 2 5 Mb2, determinare le rotazioni (moto di precessione) libere della Terra. 23/05/2019 Correzione tema d esame del 16/01/ /05/2019 Correzione tema d esame del 14/06/ /06/2019 Correzione tema d esame del 06/09/2010 (tema d esame Prof.ssa Naso)
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Dinamica dei sistemi materiali Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Dinamica dei sistemi materiali Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Mediterranea Metodi e Modelli Matematici per le Applicazioni
 Facoltà d Ingegneria A.A. 2006/2007 Appello del 28/06/2007 Un sistema materiale è costituito da un asta AB, omogenea di massa 2m e lunghezza 2R, e da un punto materiale P di massa m. L asta è incernierata
Facoltà d Ingegneria A.A. 2006/2007 Appello del 28/06/2007 Un sistema materiale è costituito da un asta AB, omogenea di massa 2m e lunghezza 2R, e da un punto materiale P di massa m. L asta è incernierata
Università degli Studi Mediterranea di Reggio Calabria Facoltà d Ingegneria Meccanica Razionale A.A. 2005/ Appello del 04/07/2006
 Facoltà d Ingegneria Meccanica Razionale A.A. 2005/2006 - Appello del 04/07/2006 In un piano verticale Oxy, un sistema materiale è costituito da un disco omogeneo, di centro Q, raggio R e massa 2m, e da
Facoltà d Ingegneria Meccanica Razionale A.A. 2005/2006 - Appello del 04/07/2006 In un piano verticale Oxy, un sistema materiale è costituito da un disco omogeneo, di centro Q, raggio R e massa 2m, e da
PROVA SCRITTA DI MECCANICA RAZIONALE (21 gennaio 2011)
") PRV SRITT DI MENI RZINLE (21 gennaio 2011) Il sistema in figura, posto in un piano verticale, è costituito di un asta rigida omogenea (massa m, lunghezza 2l) i cui estremi sono vincolati a scorrere, senza
PRV SRITT DI MENI RZINLE (21 gennaio 2011) Il sistema in figura, posto in un piano verticale, è costituito di un asta rigida omogenea (massa m, lunghezza 2l) i cui estremi sono vincolati a scorrere, senza
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 5/4/2018.
 Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 5/4/2018 Prova teorica - A Nome... N. Matricola... Ancona, 5 aprile 2018 1. Gradi di libertà di
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 5/4/2018 Prova teorica - A Nome... N. Matricola... Ancona, 5 aprile 2018 1. Gradi di libertà di
Università degli Studi Mediterranea di Reggio Calabria Facoltà d Ingegneria Meccanica Razionale A.A. 2005/ Appello del 04/07/2006
 Facoltà d Ingegneria Meccanica Razionale A.A. 2005/2006 - Appello del 04/07/2006 In un piano verticale Oxy, un sistema materiale è costituito da un disco omogeneo, di centro Q, raggio R e massa 2m, e da
Facoltà d Ingegneria Meccanica Razionale A.A. 2005/2006 - Appello del 04/07/2006 In un piano verticale Oxy, un sistema materiale è costituito da un disco omogeneo, di centro Q, raggio R e massa 2m, e da
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 00/003 Grandezze cinetiche Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale
Esercitazioni di Meccanica Razionale a.a. 00/003 Grandezze cinetiche Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Cinematica Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale - a.a.
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Cinematica Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale - a.a.
2) Si consideri il seguente sistema d equazioni differenziali di due equazioni nelle due incognite u (x,y) e v (x,y): "x + x "u.
 Si consideri il seguente sistema d equazioni differenziali di due equazioni nelle due incognite u (x,y) e v (x,y): x + x u.") Anno Accademico 008/009 Appello del 17/0/009 1) In un piano Oxy un punto materiale P di massa m scorre lungo l asse verticale Oy, mentre un altro punto materiale Q di massa m scorre lungo una retta s disposta
Anno Accademico 008/009 Appello del 17/0/009 1) In un piano Oxy un punto materiale P di massa m scorre lungo l asse verticale Oy, mentre un altro punto materiale Q di massa m scorre lungo una retta s disposta
Sistemi Dinamici e Meccanica Classica A/A Alcuni Esercizi
 Sistemi Dinamici e Meccanica Classica A/A 2008 2009. Alcuni Esercizi G.Falqui, P. Lorenzoni, Dipartimento di Matematica e Applicazioni, Università di Milano Bicocca. Versione del 23 Dicembre 2008 con esercizi
Sistemi Dinamici e Meccanica Classica A/A 2008 2009. Alcuni Esercizi G.Falqui, P. Lorenzoni, Dipartimento di Matematica e Applicazioni, Università di Milano Bicocca. Versione del 23 Dicembre 2008 con esercizi
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica II parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica II parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esame di Meccanica Razionale. Allievi Ing. MAT Appello del 6 luglio 2007
 Esame di Meccanica Razionale. Allievi Ing. MAT Appello del 6 luglio 2007 y Nel sistema di figura posto in un piano verticale il carrello A scorre con vinco- q, R M lo liscio lungo l asse verticale. Il
Esame di Meccanica Razionale. Allievi Ing. MAT Appello del 6 luglio 2007 y Nel sistema di figura posto in un piano verticale il carrello A scorre con vinco- q, R M lo liscio lungo l asse verticale. Il
Primo compito di esonero. Meccanica Razionale - Canale A - La. 22 aprile Docente C. Cammarota
 Primo compito di esonero Meccanica Razionale - Canale A - La 22 aprile 203 Docente C. Cammarota Un punto materiale P di massa m è vincolato a muoversi senza attrito su un profilo descritto dall equazione
Primo compito di esonero Meccanica Razionale - Canale A - La 22 aprile 203 Docente C. Cammarota Un punto materiale P di massa m è vincolato a muoversi senza attrito su un profilo descritto dall equazione
Esame di Meccanica Razionale (Dinamica) Allievi Ing. Edile II Anno Prova intermedia del 23 novembre 2012 durata della prova: 2h
 Allievi Ing. Edile II Anno Prova intermedia del 23 novembre 2012 durata della prova: 2h") Prova intermedia del 23 novembre 2012 durata della prova: 2h CINEMTIC E CLCL DI QUNTITÀ MECCNICHE Nelsistemadifiguraildiscodicentro ruoy ta intorno al suo centro; il secondo disco rotola senza strisciare
Prova intermedia del 23 novembre 2012 durata della prova: 2h CINEMTIC E CLCL DI QUNTITÀ MECCNICHE Nelsistemadifiguraildiscodicentro ruoy ta intorno al suo centro; il secondo disco rotola senza strisciare
PROVA SCRITTA DI MECCANICA RAZIONALE (11 giugno 2005) (C.d.L. Ing. Edile - Architettura. Prof. A. Muracchini)
 (C.d.L. Ing. Edile - Architettura. Prof. A. Muracchini)") RV SRITT DI MENI RZINLE (11 giugno 2005) (.d.l. Ing. Edile - rchitettura. rof.. Muracchini) Il sistema rappresentato in figura, mobile in un piano verticale z, è costituito di un disco circolare pesante
RV SRITT DI MENI RZINLE (11 giugno 2005) (.d.l. Ing. Edile - rchitettura. rof.. Muracchini) Il sistema rappresentato in figura, mobile in un piano verticale z, è costituito di un disco circolare pesante
Sistemi Dinamici e Meccanica Classica A/A Alcuni Esercizi
 Sistemi Dinamici e Meccanica Classica A/A 2008 2009. Alcuni Esercizi G.Falqui, P. Lorenzoni, Dipartimento di Matematica e Applicazioni,Università di Milano Bicocca. Seconda versione preliminare, 15 Dicembre
Sistemi Dinamici e Meccanica Classica A/A 2008 2009. Alcuni Esercizi G.Falqui, P. Lorenzoni, Dipartimento di Matematica e Applicazioni,Università di Milano Bicocca. Seconda versione preliminare, 15 Dicembre
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018.
 Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018 Prova teorica - A Nome... N. Matricola... Ancona, 10 febbraio 2018 1. Un asta AB di lunghezza
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 10/2/2018 Prova teorica - A Nome... N. Matricola... Ancona, 10 febbraio 2018 1. Un asta AB di lunghezza
Esercizi da fare a casa
 apitolo 1 Esercizi da fare a casa 1.1 Premesse I seguenti esercizi sono risolubili nella seconda settimana di corso. Per quelli del primo gruppo le soluzioni si possono estrarre dal mio libro di Esercizi
apitolo 1 Esercizi da fare a casa 1.1 Premesse I seguenti esercizi sono risolubili nella seconda settimana di corso. Per quelli del primo gruppo le soluzioni si possono estrarre dal mio libro di Esercizi
PROVA SCRITTA DI MECCANICA RAZIONALE (9 gennaio 2015) (C.d.L. Ing. Civile [L-Z] e C.d.L. Ing. Edile/Architettura Prof. A.
![PROVA SCRITTA DI MECCANICA RAZIONALE (9 gennaio 2015) (C.d.L. Ing. Civile [L-Z] e C.d.L. Ing. Edile/Architettura Prof. A.](/thumbs/62/46613558.jpg "PROVA SCRITTA DI MECCANICA RAZIONALE (9 gennaio 2015) (C.d.L. Ing. Civile [L-Z] e C.d.L. Ing. Edile/Architettura Prof. A.") PRV SCRITT DI MECCNIC RZINLE (9 gennaio 2015) In un piano verticale, un disco D omogeneo (massa m, raggio r), rotola senza strisciare sull asse ; al suo centro è incernierata un asta omogenea (massa m,
PRV SCRITT DI MECCNIC RZINLE (9 gennaio 2015) In un piano verticale, un disco D omogeneo (massa m, raggio r), rotola senza strisciare sull asse ; al suo centro è incernierata un asta omogenea (massa m,
Corsi di Laurea in Ingegneria Meccanica e Informatica Anno Accademico 2015/2016 Meccanica Razionale
 Corsi di Laurea in Ingegneria Meccanica e Informatica Anno Accademico 15/16 Meccanica Razionale Nome... N. Matricola... Ancona, 7 giugno 16 1. Un corpo rigido piano è formato da due aste AC e BC, di ugual
Corsi di Laurea in Ingegneria Meccanica e Informatica Anno Accademico 15/16 Meccanica Razionale Nome... N. Matricola... Ancona, 7 giugno 16 1. Un corpo rigido piano è formato da due aste AC e BC, di ugual
Primo compito di esonero Meccanica Razionale
 Primo compito di esonero 9 aprile 20 Un punto materiale P di massa m è vincolato a muoversi senza attrito su un profilo descritto dall equazione y = 4 x 2 in un piano verticale soggetto al peso e ad una
Primo compito di esonero 9 aprile 20 Un punto materiale P di massa m è vincolato a muoversi senza attrito su un profilo descritto dall equazione y = 4 x 2 in un piano verticale soggetto al peso e ad una
ESERCIZI 53. i=1. i=1
 ESERCIZI 53 Esercizio 47 Si dimostri la 57.10). [Suggerimento. Derivando la seconda delle 57.4) e utilizzando l identità di Jacobi per il prodotto vettoriale cfr. l esercizio 46), si ottiene d N m i ξ
ESERCIZI 53 Esercizio 47 Si dimostri la 57.10). [Suggerimento. Derivando la seconda delle 57.4) e utilizzando l identità di Jacobi per il prodotto vettoriale cfr. l esercizio 46), si ottiene d N m i ξ
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 6 Giugno 2017 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi in un piano un sistema di riferimento Oxy. Si
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 6 Giugno 2017 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi in un piano un sistema di riferimento Oxy. Si
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 30 Gennaio 207 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi in un piano un sistema di riferimento Oxy. In
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 30 Gennaio 207 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi in un piano un sistema di riferimento Oxy. In
Φ D 2 L. k > 0. M O=A s. sistema (che è rappresentato in figura ). Infine, vogliamo calcolare le reazioni vincolari sul sistema.
. Infine, vogliamo calcolare le reazioni vincolari sul sistema.") Esercizio 1. Un sistema materiale è costituito da una lamina piana omogenea di massa M e lato L e da un asta AB di lunghezza l e massa m. La lamina scorre con un lato sull asse x ed è soggetta a una forza
Esercizio 1. Un sistema materiale è costituito da una lamina piana omogenea di massa M e lato L e da un asta AB di lunghezza l e massa m. La lamina scorre con un lato sull asse x ed è soggetta a una forza
PROVA SCRITTA DI MECCANICA RAZIONALE (12 gennaio 2018) (Prof. A. Muracchini)
 (Prof. A. Muracchini)") PRV SRITT DI MENI RZINLE (12 gennaio 2018) Il sistema in figura, mobile in un piano verticale, è costituito di un disco rigido D, omogeneo (massa M, raggio R) vincolato in modo che il punto del suo bordo
PRV SRITT DI MENI RZINLE (12 gennaio 2018) Il sistema in figura, mobile in un piano verticale, è costituito di un disco rigido D, omogeneo (massa M, raggio R) vincolato in modo che il punto del suo bordo
Università degli Studi Mediterranea di Reggio Calabria Facoltà d Ingegneria Meccanica Razionale Anno Accademico 2012/2013 Appello del 06/02/2013
 Facoltà d Ingegneria Meccanica Razionale Anno Accademico 2012/2013 Appello del 06/02/2013 La prova consta di 4 Quesiti a risposta chiusa e 4 ; la durata della prova è di 2 ore e 30 minuti. Non è permesso
Facoltà d Ingegneria Meccanica Razionale Anno Accademico 2012/2013 Appello del 06/02/2013 La prova consta di 4 Quesiti a risposta chiusa e 4 ; la durata della prova è di 2 ore e 30 minuti. Non è permesso
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica III parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica III parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Soluzione degli esercizi dello scritto di Meccanica del 08/07/2019
 Soluzione degli esercizi dello scritto di Meccanica del 08/07/2019 Esercizio 1 Un asta rigida di lunghezza L = 0.8 m e massa M è vincolata nell estremo A ad un perno liscio ed è appesa all altro estremo
Soluzione degli esercizi dello scritto di Meccanica del 08/07/2019 Esercizio 1 Un asta rigida di lunghezza L = 0.8 m e massa M è vincolata nell estremo A ad un perno liscio ed è appesa all altro estremo
Corso di Fondamenti di Meccanica - Allievi MECC. II Anno N.O. II prova in itinere del 31 gennaio 2006 Esercizio di Meccanica Razionale
 Cognome, nome, matricola e firma.............................. Corso di Fondamenti di Meccanica - Allievi MECC. II Anno N.O. II prova in itinere del 31 gennaio 2006 Esercizio di Meccanica Razionale Un
Cognome, nome, matricola e firma.............................. Corso di Fondamenti di Meccanica - Allievi MECC. II Anno N.O. II prova in itinere del 31 gennaio 2006 Esercizio di Meccanica Razionale Un
rot O = M e,a che proiettata lungo gli assi della terna principale di inerzia con origine in O da luogo alle equazioni di Eulero
 Sistemi rigidi vincolati. 1.Vincolo di punto fisso. Un punto solidale a S e fisso durante il moto. Sia O tale punto che assumiamo essere l origine di una terna solidale e principale di inerzia e coincidente
Sistemi rigidi vincolati. 1.Vincolo di punto fisso. Un punto solidale a S e fisso durante il moto. Sia O tale punto che assumiamo essere l origine di una terna solidale e principale di inerzia e coincidente
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Svincolamento statico Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Svincolamento statico Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale
[Costanti fisiche: g = m/s 2, γ = m 3 kg 1 s 2.] Esercizio n. 1 Esercizio n ξ) cm l uno dall altro. I rulli ruotano con
![[Costanti fisiche: g = m/s 2, γ = m 3 kg 1 s 2.] Esercizio n. 1 Esercizio n ξ) cm l uno dall altro. I rulli ruotano con](/thumbs/88/116199048.jpg "[Costanti fisiche: g = m/s 2, γ = m 3 kg 1 s 2.] Esercizio n. 1 Esercizio n ξ) cm l uno dall altro. I rulli ruotano con") Numero progressivo: 6 ξ = 27 Turno: Fila: Posto: Matricola: 000069526 Cognome e nome: (dati nascosti per tutela privacy). Una scala a pioli, il cui peso è distribuito uniformemente lungo tutta la sua lunghezza,
Numero progressivo: 6 ξ = 27 Turno: Fila: Posto: Matricola: 000069526 Cognome e nome: (dati nascosti per tutela privacy). Una scala a pioli, il cui peso è distribuito uniformemente lungo tutta la sua lunghezza,
Registro di Meccanica /17 - F. Demontis 2
 Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: 9 giugno 2017 1. Venerdì 3/03/2017, 11 13. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: 9 giugno 2017 1. Venerdì 3/03/2017, 11 13. ore: 2(2) Presentazione
FM210 - Fisica Matematica 1 Tutorato 11 ( )
") Corso di laurea in atematica - Anno Accademico 3/4 F - Fisica atematica Tutorato (--) Esercizio. Si calcolino i momenti principali di inerzia dei seguenti corpi rigidi rispetto al loro centro di massa:.
Corso di laurea in atematica - Anno Accademico 3/4 F - Fisica atematica Tutorato (--) Esercizio. Si calcolino i momenti principali di inerzia dei seguenti corpi rigidi rispetto al loro centro di massa:.
Problemi aggiuntivi sulla Dinamica dei Sistemi di punti materiali: A) Impulso + conservazione quantità di moto
 Impulso + conservazione quantità di moto") Problemi aggiuntivi sulla Dinamica dei Sistemi di punti materiali: A) Impulso + conservazione quantità di moto Problema n. 1: Un carro armato, posto in quiete su un piano orizzontale, spara una granata
Problemi aggiuntivi sulla Dinamica dei Sistemi di punti materiali: A) Impulso + conservazione quantità di moto Problema n. 1: Un carro armato, posto in quiete su un piano orizzontale, spara una granata
Calcolo vettoriale. 2. Nel piano Oxy sono dati i vettori. con la direzione positiva dell asse x,
 Calcolo vettoriale 1 Nel piano sono dati i vettori (P ) di modulo 4 e formante un angolo di π 6 (Q ) = 3i 3j, (P R) = 2 3i con la direzione positiva dell asse, Determinare Q, vers(q ), (P ) + (Q ), (P
Calcolo vettoriale 1 Nel piano sono dati i vettori (P ) di modulo 4 e formante un angolo di π 6 (Q ) = 3i 3j, (P R) = 2 3i con la direzione positiva dell asse, Determinare Q, vers(q ), (P ) + (Q ), (P
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 5
 Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
Indice 1 Cinematica del punto... 1 1.1 Componenti intrinseche di velocità e accelerazione... 3 1.2 Moto piano in coordinate polari... 5 2 Cinematica del corpo rigido... 9 2.1 Configurazioni rigide......
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE
 MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
MODELLI MATEMATICI PER LA MECCANICA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE Argomenti svolti nell A.A.2016-17 (03/10/2016) Introduzione al corso.spazi affini. Spazi vettoriali. Conseguenze delle ipotesi
1. Siano A e B due punti di un atto di moto rigido piano. Dire quale delle seguenti affermazioni è errata:
 Università del Salento Facoltà di Ingegneria Corsi di Laurea in Ingegneria Industriale e Civile Prova scritta di Meccanica Razionale 20 giugno 2016 Soluzioni Parte 1: Domande a risposta multipla. 1. Siano
Università del Salento Facoltà di Ingegneria Corsi di Laurea in Ingegneria Industriale e Civile Prova scritta di Meccanica Razionale 20 giugno 2016 Soluzioni Parte 1: Domande a risposta multipla. 1. Siano
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina
 Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si consideri un cilindro rigido libero in moto rispetto a un osservatore. Sia O il punto occupato
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si consideri un cilindro rigido libero in moto rispetto a un osservatore. Sia O il punto occupato
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 21/6/2018.
 Corso di Laurea in Ingegneria Meccanica nno ccademico 2017/2018 Meccanica Razionale - Prova teorica del 21/6/2018 Prova teorica - Nome... N. Matricola... ncona, 21 giugno 2018 1. (i) Enunciare e dimostrare
Corso di Laurea in Ingegneria Meccanica nno ccademico 2017/2018 Meccanica Razionale - Prova teorica del 21/6/2018 Prova teorica - Nome... N. Matricola... ncona, 21 giugno 2018 1. (i) Enunciare e dimostrare
Esercizi di statica e dinamica I parte
 Esercizi di statica e dinamica I parte EQ1) Una lamina CD di forma quadrata (lato 2L e densità in un suo generico punto P, µ(p) = 3m 8L 4 GP 2, con G punto d incontro delle diagonali del quadrato) è vincolata
Esercizi di statica e dinamica I parte EQ1) Una lamina CD di forma quadrata (lato 2L e densità in un suo generico punto P, µ(p) = 3m 8L 4 GP 2, con G punto d incontro delle diagonali del quadrato) è vincolata
Esercizi e problemi supplementari sulla dinamica dei sistemi di punti materiali
 Esercizi e problemi supplementari sulla dinamica dei sistemi di punti materiali A) Applicazione del teorema dell impulso + conservazione quantità di moto Problema n. 1: Un blocco A di massa m = 4 kg è
Esercizi e problemi supplementari sulla dinamica dei sistemi di punti materiali A) Applicazione del teorema dell impulso + conservazione quantità di moto Problema n. 1: Un blocco A di massa m = 4 kg è
DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA
 DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA Sia dato un sistema con vincoli lisci, bilaterali e FISSI. Ricaviamo, dall equazione simbolica della dinamica, il teorema
DEDUZIONE DEL TEOREMA DELL'ENERGIA CINETICA DELL EQUAZIONE SIMBOLICA DELLA DINAMICA Sia dato un sistema con vincoli lisci, bilaterali e FISSI. Ricaviamo, dall equazione simbolica della dinamica, il teorema
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica I parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Meccanica analitica I parte Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Primo compito di esonero. Meccanica Razionale - Canale A - La. 23 aprile Docente C. Cammarota
 Primo compito di esonero Meccanica Razionale - Canale A - La 23 aprile 2014 Docente C. Cammarota Un punto materiale P di massa m è vincolato a muoversi senza attrito su un profilo descritto dall equazione
Primo compito di esonero Meccanica Razionale - Canale A - La 23 aprile 2014 Docente C. Cammarota Un punto materiale P di massa m è vincolato a muoversi senza attrito su un profilo descritto dall equazione
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 5 Giugno 018 (usare fogli diversi per esercizi diversi) Primo Esercizio In un piano si fissi un sistema di riferimento Oxy e si
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 5 Giugno 018 (usare fogli diversi per esercizi diversi) Primo Esercizio In un piano si fissi un sistema di riferimento Oxy e si
Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: Cognome e nome: (dati nascosti per tutela privacy)
") Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000695216 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Numero progressivo: 6 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000695216 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 13/1/2018
 Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 13/1/2018 Nome... N. Matricola... Ancona, 13 gennaio 2018 1. Un sistema rigido piano è costituito
Corso di Laurea in Ingegneria Meccanica Anno Accademico 2017/2018 Meccanica Razionale - Prova teorica del 13/1/2018 Nome... N. Matricola... Ancona, 13 gennaio 2018 1. Un sistema rigido piano è costituito
Registro di Meccanica /17 - F. Demontis 2
 Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: May 19, 2017 1. Venerdì 3/03/2017, 11 13. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2016/2017 docente: Francesco Demontis ultimo aggiornamento: May 19, 2017 1. Venerdì 3/03/2017, 11 13. ore: 2(2) Presentazione
Prova scritta di Meccanica Razionale
 Prova scritta di Meccanica Razionale - 0.07.013 ognome e Nome... N. matricola....d.l.: MLT UTLT IVLT MTLT MELT nno di orso: altro FIL 1 Esercizio 1. Nel riferimento cartesiano ortogonale, si consideri
Prova scritta di Meccanica Razionale - 0.07.013 ognome e Nome... N. matricola....d.l.: MLT UTLT IVLT MTLT MELT nno di orso: altro FIL 1 Esercizio 1. Nel riferimento cartesiano ortogonale, si consideri
Tabella 3: Best 5 out of 6 es.1 es.2 es.3 es.4 es.5 es.6 somma Meccanica Razionale 1: Scritto Generale:
 Tabella 3: Best 5 out of 6 es.1 es.2 es.3 es.4 es.5 es.6 somma 5 5 5 5 5 5 3 Meccanica Razionale 1: Scritto Generale: 16.9.211 Cognome e nome:....................................matricola:......... 1.
Tabella 3: Best 5 out of 6 es.1 es.2 es.3 es.4 es.5 es.6 somma 5 5 5 5 5 5 3 Meccanica Razionale 1: Scritto Generale: 16.9.211 Cognome e nome:....................................matricola:......... 1.
Esercizi di Cinematica
 Esercizio 1 Esercizi di Cinematica Esercitazioni di Fisica LA per ingegneri - A.A. 2009-2010 Data la legge oraria: s(t) = a t 3 b t + c (con a = 3 ms 3, b = 2 ms 1, c = 1 m) calcolare la posizione e la
Esercizio 1 Esercizi di Cinematica Esercitazioni di Fisica LA per ingegneri - A.A. 2009-2010 Data la legge oraria: s(t) = a t 3 b t + c (con a = 3 ms 3, b = 2 ms 1, c = 1 m) calcolare la posizione e la
Soluzione della prova scritta del 18 Aprile 2011
 Soluzione della prova scritta del 18 Aprile 011 1. Nel sistema di figura, posto in un piano verticale, i due dischi, di peso, sono omogenei e hanno raggio, mentrelalaminaquadratahalato epeso. La lamina
Soluzione della prova scritta del 18 Aprile 011 1. Nel sistema di figura, posto in un piano verticale, i due dischi, di peso, sono omogenei e hanno raggio, mentrelalaminaquadratahalato epeso. La lamina
Compito di gennaio 2001
 Compito di gennaio 001 Un asta omogenea A di massa m e lunghezza l è libera di ruotare attorno al proprio estremo mantenendosi in un piano verticale All estremità A dell asta è saldato il baricentro di
Compito di gennaio 001 Un asta omogenea A di massa m e lunghezza l è libera di ruotare attorno al proprio estremo mantenendosi in un piano verticale All estremità A dell asta è saldato il baricentro di
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 22/23 Matrici d inerzia Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale -
Esercitazioni di Meccanica Razionale a.a. 22/23 Matrici d inerzia Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica Razionale -
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 10 Gennaio 2017 (usare fogli diversi per esercizi diversi) Primo Esercizio Si consideri il sistema di riferimento Oxy. L estremo
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 10 Gennaio 2017 (usare fogli diversi per esercizi diversi) Primo Esercizio Si consideri il sistema di riferimento Oxy. L estremo
EQUAZIONI DIFFERENZIALI
 Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
Indice 1 EQUAZIONI DIFFERENZIALI 3 1.1 Equazioni fisicamente significative...................... 3 1.1.1 A cosa servono?............................. 3 1.1.2 Legge di Newton............................
1 Cinematica del punto Componenti intrinseche di velocità e accelerazione Moto piano in coordinate polari... 4
 Indice 1 Cinematica del punto 1 1.1 Componenti intrinseche di velocità e accelerazione........... 3 1.2 Moto piano in coordinate polari...................... 4 2 Cinematica del corpo rigido 7 2.1 Moti
Indice 1 Cinematica del punto 1 1.1 Componenti intrinseche di velocità e accelerazione........... 3 1.2 Moto piano in coordinate polari...................... 4 2 Cinematica del corpo rigido 7 2.1 Moti
Esercizi terzo principio
 Esercizi terzo principio Esercitazioni di Fisica LA per ingegneri - A.A. 2004-2005 Esercizio 1 Una ruota di massa m =10kg e raggio R =1m viene tirata contro un gradino di altezza h =30cm con una velocità
Esercizi terzo principio Esercitazioni di Fisica LA per ingegneri - A.A. 2004-2005 Esercizio 1 Una ruota di massa m =10kg e raggio R =1m viene tirata contro un gradino di altezza h =30cm con una velocità
VII ESERCITAZIONE. Soluzione
 VII ESERCITAZIONE 1. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria. Calcoliamo
VII ESERCITAZIONE 1. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria. Calcoliamo
II compito di esonero di Meccanica Razionale per fisici del 2 maggio 1989 Università dell Aquila
 II compito di esonero di Meccanica Razionale per fisici del 2 maggio 1989 Università dell Aquila Agli estremi di una sbarretta di lunghezza 2l e massa trascurabile sono saldate due particelle puntiformi
II compito di esonero di Meccanica Razionale per fisici del 2 maggio 1989 Università dell Aquila Agli estremi di una sbarretta di lunghezza 2l e massa trascurabile sono saldate due particelle puntiformi
VII ESERCITAZIONE - 29 Novembre 2013
 VII ESERCITAZIONE - 9 Novembre 013 I. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria.
VII ESERCITAZIONE - 9 Novembre 013 I. MOMENTO DI INERZIA DEL CONO Calcolare il momento di inerzia di un cono omogeneo massiccio, di altezza H, angolo al vertice α e massa M, rispetto al suo asse di simmetria.
Esercizi sul corpo rigido.
 Esercizi sul corpo rigido. Precisazioni: tutte le figure geometriche si intendono omogenee, se non è specificato diversamente tutti i vincoli si intendono lisci salvo diversamente specificato. Abbreviazioni:
Esercizi sul corpo rigido. Precisazioni: tutte le figure geometriche si intendono omogenee, se non è specificato diversamente tutti i vincoli si intendono lisci salvo diversamente specificato. Abbreviazioni:
Compito del 14 giugno 2004
 Compito del 14 giugno 004 Un disco omogeneo di raggio R e massa m rotola senza strisciare lungo l asse delle ascisse di un piano verticale. Il centro C del disco è collegato da una molla di costante elastica
Compito del 14 giugno 004 Un disco omogeneo di raggio R e massa m rotola senza strisciare lungo l asse delle ascisse di un piano verticale. Il centro C del disco è collegato da una molla di costante elastica
l 1 l 2 Uncorpo viene lanciato su per un piano scabro inclinato di 45 rispetto all orizzontale
 1. Uncorpo viene lanciato su per un piano scabro inclinato di 45 rispetto all orizzontale (µ d = 1/2). Detto T S il tempo necessario al punto per raggiungere la quota massima e T D il tempo che, a partire
1. Uncorpo viene lanciato su per un piano scabro inclinato di 45 rispetto all orizzontale (µ d = 1/2). Detto T S il tempo necessario al punto per raggiungere la quota massima e T D il tempo che, a partire
Tutorato 8 - MA/FM210-12/5/2017
 Tutorato 8 - MA/FM - /5/7 Esercizio. Si calcolino i momenti principali di inerzia dei seguenti corpi rigidi rispetto al loro centro di massa:. Disco sottile omogeneo di massa M e raggio R [Risposta: I
Tutorato 8 - MA/FM - /5/7 Esercizio. Si calcolino i momenti principali di inerzia dei seguenti corpi rigidi rispetto al loro centro di massa:. Disco sottile omogeneo di massa M e raggio R [Risposta: I
Compito di Fisica Generale (Meccanica) 17/01/2013
 17/01/2013") Compito di Fisica Generale (Meccanica) 17/01/2013 1) Un proiettile massa m è connesso ad una molla di costante elastica k e di lunghezza a riposo nulla. Supponendo che il proiettile venga lanciato a t=0
Compito di Fisica Generale (Meccanica) 17/01/2013 1) Un proiettile massa m è connesso ad una molla di costante elastica k e di lunghezza a riposo nulla. Supponendo che il proiettile venga lanciato a t=0
Meccanica Analitica e Relativistica - I Esonero - 14/12/2016
 Meccanica nalitica e Relativistica - I Esonero - 14/12/2016 In un piano verticale è scelto un sistema di riferimento di assi cartesiani ortogonali z di origine e con l asse z orientato verso il basso.
Meccanica nalitica e Relativistica - I Esonero - 14/12/2016 In un piano verticale è scelto un sistema di riferimento di assi cartesiani ortogonali z di origine e con l asse z orientato verso il basso.
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 7 Luglio 8 (usare fogli diversi per esercizi diversi) Primo Esercizio Si consideri il corpo rigido piano descritto in figura, formato
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 7 Luglio 8 (usare fogli diversi per esercizi diversi) Primo Esercizio Si consideri il corpo rigido piano descritto in figura, formato
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 7 Giugno 17 (usare fogli diversi per esercizi diversi) Primo Esercizio Si consideriuna lamina triangolareabc omogeneadi massam,
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 7 Giugno 17 (usare fogli diversi per esercizi diversi) Primo Esercizio Si consideriuna lamina triangolareabc omogeneadi massam,
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina
 Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si studino i sistemi olonomi elencati nei quesiti seguenti seguendo lo schema qui proposto: costruzione
Esercitazione di Meccanica Razionale 16 novembre 2016 Laurea in Ingegneria Meccanica Latina Quesito 1. Si studino i sistemi olonomi elencati nei quesiti seguenti seguendo lo schema qui proposto: costruzione
Meccanica 15Aprile 2016
 Meccanica 15Aprile 2016 Problema 1 (1 punto) Una pallottola di massa m= 20 g arriva con velocità V= 300 m/s, inclinata verso il basso di un anglo = 15 rispetto al piano orizzontale, su un blocco di massa
Meccanica 15Aprile 2016 Problema 1 (1 punto) Una pallottola di massa m= 20 g arriva con velocità V= 300 m/s, inclinata verso il basso di un anglo = 15 rispetto al piano orizzontale, su un blocco di massa
Numero progressivo: 11 Turno: 1 Fila: 1 Posto: 1 Matricola: Cognome e nome: (dati nascosti per tutela privacy)
") Numero progressivo: 11 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000793913 Cognome e nome: (dati nascosti per tutela privacy) 1. La somma delle forze applicate a un corpo rigido è nulla. Si può per questo
Numero progressivo: 11 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000793913 Cognome e nome: (dati nascosti per tutela privacy) 1. La somma delle forze applicate a un corpo rigido è nulla. Si può per questo
Esercizio 1 L/3. mg CM Mg. La sommatoria delle forze e dei momenti deve essere uguale a 0 M A. ω è il verso di rotazione con cui studio il sistema
 Esercizio 1 Una trave omogenea di lunghezza L e di massa M è appoggiata in posizione orizzontale su due fulcri lisci posti alle sue estremità. Una massa m è appoggiata sulla trave ad una distanza L/3 da
Esercizio 1 Una trave omogenea di lunghezza L e di massa M è appoggiata in posizione orizzontale su due fulcri lisci posti alle sue estremità. Una massa m è appoggiata sulla trave ad una distanza L/3 da
Numero progressivo: 35 Turno: 1 Fila: 1 Posto: 1 Matricola: Cognome e nome: (dati nascosti per tutela privacy)
") Numero progressivo: 35 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000665624 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Numero progressivo: 35 Turno: 1 Fila: 1 Posto: 1 Matricola: 0000665624 Cognome e nome: (dati nascosti per tutela privacy) 1. Di quanto ruota in un giorno sidereo il piano di oscillazione del pendolo di
Esercizi di Meccanica Razionale - Parte III. 1. Un sistema rigido e costituito da due aste AB e BC, di lunghezza rispettivamente
 Universita' degli Studi di ncona Esercizi di Meccanica Razionale - Parte III 1. Un sistema rigido e costituito da due aste e, di lunghezza rispettivamente L ed l e di massem ed m, saldate ad angolo retto
Universita' degli Studi di ncona Esercizi di Meccanica Razionale - Parte III 1. Un sistema rigido e costituito da due aste e, di lunghezza rispettivamente L ed l e di massem ed m, saldate ad angolo retto
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 6 Giugno 08 (usare fogli diversi per esercizi diversi) Primo Esercizio i) Assumiamo che Q sia un punto di un corpo rigido piano
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 6 Giugno 08 (usare fogli diversi per esercizi diversi) Primo Esercizio i) Assumiamo che Q sia un punto di un corpo rigido piano
x = λ y = λ z = λ. di libertà del sistema ed individuare un opportuno sistema di coordinate lagrangiane.
 1 Università di Pavia Facoltà di Ingegneria Corso di Laurea in Ingegneria Industriale Correzione prova scritta Esame di Fisica Matematica 22 febbraio 2012 1. Determinare, per il seguente sistema di vettori
1 Università di Pavia Facoltà di Ingegneria Corso di Laurea in Ingegneria Industriale Correzione prova scritta Esame di Fisica Matematica 22 febbraio 2012 1. Determinare, per il seguente sistema di vettori
Esercitazione 2. Soluzione
 Esercitazione 2 Esercizio 1 - Resistenza dell aria Un blocchetto di massa m = 0.01 Kg (10 grammi) viene appoggiato delicatamente con velocità iniziale zero su un piano inclinato rispetto all orizziontale
Esercitazione 2 Esercizio 1 - Resistenza dell aria Un blocchetto di massa m = 0.01 Kg (10 grammi) viene appoggiato delicatamente con velocità iniziale zero su un piano inclinato rispetto all orizziontale
Foglio di Esercizi 7 Meccanica Razionale a.a. 2018/19 Canale A-L (P. Buttà)
") Foglio di Esercizi 7 Meccanica Razionale a.a. 018/19 Canale A-L P. Buttà Esercizio 1. Sia {O; x, y, z} un sistema di riferimento ortonormale con l asse z diretto secondo la verticale ascendente. Un punto
Foglio di Esercizi 7 Meccanica Razionale a.a. 018/19 Canale A-L P. Buttà Esercizio 1. Sia {O; x, y, z} un sistema di riferimento ortonormale con l asse z diretto secondo la verticale ascendente. Un punto
MECCANICA APPLICATA ALLE MACCHINE Allievi meccanici AA prova del Problema N.1. Problema N.2
 MECCANICA APPLICATA ALLE MACCHINE Allievi meccanici AA.2011-2012 prova del 01-02-2013 Problema N.1 Il sistema meccanico illustrato in figura giace nel piano verticale. L asta AB con baricentro G 2 è incernierata
MECCANICA APPLICATA ALLE MACCHINE Allievi meccanici AA.2011-2012 prova del 01-02-2013 Problema N.1 Il sistema meccanico illustrato in figura giace nel piano verticale. L asta AB con baricentro G 2 è incernierata
Esercitazioni del 09/06/2010
 Esercitazioni del 09/06/2010 Problema 1) Un anello di massa m e di raggio r rotola, senza strisciare, partendo da fermo, lungo un piano inclinato di un angolo α=30 0. a) Determinare la legge del moto.
Esercitazioni del 09/06/2010 Problema 1) Un anello di massa m e di raggio r rotola, senza strisciare, partendo da fermo, lungo un piano inclinato di un angolo α=30 0. a) Determinare la legge del moto.
Problemi di dinamica del punto materiale
 Problemi di dinamica del punto materiale 1. Un corpo di massa M = 200 kg viene lanciato con velocità v 0 = 36 km/ora su un piano inclinato di un angolo θ = 30 o rispetto all orizzontale. Nel salire, il
Problemi di dinamica del punto materiale 1. Un corpo di massa M = 200 kg viene lanciato con velocità v 0 = 36 km/ora su un piano inclinato di un angolo θ = 30 o rispetto all orizzontale. Nel salire, il
Esercizi conservazione dell energia
 Esercizio 1 Esercizi conservazione dell energia Esercitazioni di Fisica LA per ingegneri - A.A. 2003-2004 Un uomo di massa m = 70 kg si trova al centro di un carrello rettangolare omogeneo di massa M =
Esercizio 1 Esercizi conservazione dell energia Esercitazioni di Fisica LA per ingegneri - A.A. 2003-2004 Un uomo di massa m = 70 kg si trova al centro di un carrello rettangolare omogeneo di massa M =
P = mg; F N = mg cosα; F A = µ d F N = µ d mg cosα.
 Esercizio 1 a) Fissiamo un asse di riferimento x parallelo al piano inclinato, diretto verso l alto e con origine nella posizione iniziale del corpo alla base del piano. Sia m la massa del corpo, P la
Esercizio 1 a) Fissiamo un asse di riferimento x parallelo al piano inclinato, diretto verso l alto e con origine nella posizione iniziale del corpo alla base del piano. Sia m la massa del corpo, P la
Compito di gennaio 2005
 Compito di gennaio 2005 In un piano verticale, si consideri il vincolo mobile costituito da una semicirconferenza di raggio R e centro C, i cui estremi A e B possono strisciare lungo l asse delle ascisse:
Compito di gennaio 2005 In un piano verticale, si consideri il vincolo mobile costituito da una semicirconferenza di raggio R e centro C, i cui estremi A e B possono strisciare lungo l asse delle ascisse:
Meccanica Razionale 1: Primo parziale Cognome e nome:...matricola:... es.1 es.2 es.3 somma
 Meccanica Razionale 1: Primo parziale 15.04.010 Cognome e nome:....................................matricola:......... es.1 es. es.3 somma 9 1 9 30 1. Consideriamo il seguente moto di un punto P : x =
Meccanica Razionale 1: Primo parziale 15.04.010 Cognome e nome:....................................matricola:......... es.1 es. es.3 somma 9 1 9 30 1. Consideriamo il seguente moto di un punto P : x =
CdS in Ingegneria Energetica, Università di Bologna Programma dettagliato del corso di Fisica Generale T-A
 CdS in Ingegneria Energetica, Università di Bologna Programma dettagliato del corso di Fisica Generale T-A prof. S. Pellegrini Introduzione. Il metodo scientifico. Principi e leggi della Fisica. I modelli
CdS in Ingegneria Energetica, Università di Bologna Programma dettagliato del corso di Fisica Generale T-A prof. S. Pellegrini Introduzione. Il metodo scientifico. Principi e leggi della Fisica. I modelli
Scritto di Analisi II e Meccanica razionale del
 Scritto di Analisi II e Meccanica razionale del 19.1.212 Esercizio di meccanica razionale Una terna cartesiana Oxyz ruota con velocità angolare costante ω attorno all asse verticale Oy rispetto ad un riferimento
Scritto di Analisi II e Meccanica razionale del 19.1.212 Esercizio di meccanica razionale Una terna cartesiana Oxyz ruota con velocità angolare costante ω attorno all asse verticale Oy rispetto ad un riferimento
Fondamenti di Meccanica Esame del
 Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Politecnico di Milano Fondamenti di Meccanica Esame del 0.02.2009. In un piano verticale un asta omogenea AB, di lunghezza l e massa m, ha l estremo A vincolato a scorrere senza attrito su una guida verticale.
Compito di Meccanica Razionale
 Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 16 Febbraio 27 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi un sistema di riferimento Oxy in un piano e
Compito di Meccanica Razionale Corso di Laurea in Ingegneria Aerospaziale 16 Febbraio 27 (usare fogli diversi per esercizi diversi) Primo Esercizio Si fissi un sistema di riferimento Oxy in un piano e
Registro di Meccanica /13 - F. Demontis 2
 Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2013/2014 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2014 1. Lunedì 3/03/2014, 9 11. ore: 2(2) Presentazione
Registro delle lezioni di MECCANICA 1 Corso di Laurea in Matematica 8 CFU - A.A. 2013/2014 docente: Francesco Demontis ultimo aggiornamento: 21 maggio 2014 1. Lunedì 3/03/2014, 9 11. ore: 2(2) Presentazione
Intendo svolgere (nessuna risposta: compito intero): Compito intero Recupero I parziale Recupero II parziale Recupero III parziale.
: Compito intero Recupero I parziale Recupero II parziale Recupero III parziale.") IV sessione di esami di Fisica Generale L-A 1 luglio 2003 (Esercizi) Numero di matricola (allineato a destra): Intendo svolgere (nessuna risposta: compito intero): Compito intero Recupero I parziale Recupero
IV sessione di esami di Fisica Generale L-A 1 luglio 2003 (Esercizi) Numero di matricola (allineato a destra): Intendo svolgere (nessuna risposta: compito intero): Compito intero Recupero I parziale Recupero
Esercitazioni di Meccanica Razionale
 Esercitazioni di Meccanica Razionale a.a. 2002/2003 Statica e dinamica relativa Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica
Esercitazioni di Meccanica Razionale a.a. 2002/2003 Statica e dinamica relativa Maria Grazia Naso naso@ing.unibs.it Dipartimento di Matematica Università degli Studi di Brescia Esercitazioni di Meccanica