Regolatori PID. Regolatori standard con parametri regolabili:
|
|
|
- Achille Monti
- 9 anni fa
- Просмотров:
Транскрипт
1 Regolatori PID Regolatori stanar con parametri regolabili:

2 La variabile i controllo è la somma i tre contributi non sempre presenti contemporaneamente): Cs) KP + KI / s + KD s C s) K + + s i s Vantaggi: controllo soisfacente i un ampia gamma i processi semplicità i taratura in assenza i un moello el processo ampia isponibilità commerciale basso costo

3 effetto ell azione proporzionale: aumenta il guaagno i anello estabilizzante) effetto ell azione integrale: migliora le prestazioni a regime estabilizzante) effetto ell azione erivativa anticipatrice): migliora il transitorio stabilizzante) risposta al graino i un sistema con regolatore proporzionale A B A: errore > erivata < B:errore > erivata > L azione i controllo è maggiore se l errore è crescente e minore se l errore è ecrescente

4 Regolatori P: per processi a.s., quano le prestazioni statiche non richieono l uso ell azione I Regolatori I: è necessaria l azione integrale per le prestazioni a regime, è ammissibile un restringimento i bana Regolatori PI: è necessaria l azione integrale per le prestazioni a regime, non è ammissibile un restringimento i bana si introuce uno zero) Regolatori PD: non è necessaria l azione integrale, si vuole aumentare la bana

5

6

7 + + s s K s C i ) La f.. t.: non è fisicamente realizzabile, si eve aggiungere un polo 2 5 ) N N s s s K s C i
 + +")
8 LIMIAZIONE DELL AZIONE DERIVAIVA Cambiamento brusco el riferimento

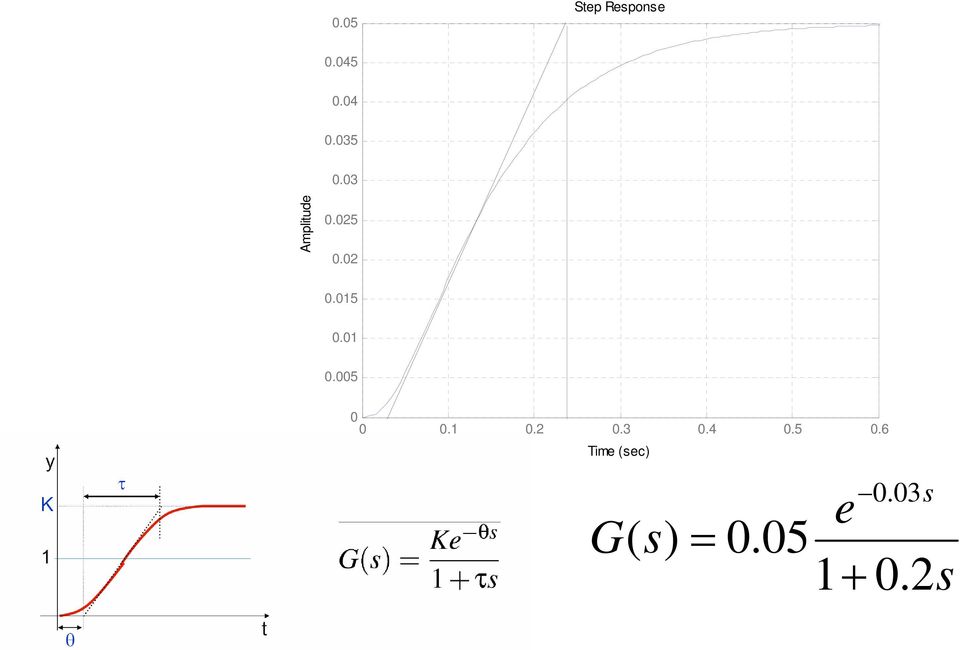
9 MEODI DI ARAURA EMPIRICI ZIEGLER-NICHOLS) ANALIICI ZIEGLER-NICHOLS A CAENA APERA Si rileva sperimentalmente la risposta al graino el sistema a catena aperta s e P s) k R k / τ +τs P K i /R PI.9/R /.3 PID.2/R 2 /2 Coeff. smorzamento.2:

10 ZIEGLER-NICHOLS A CAENA CHIUSA Si rileva sperimentalmente la risposta la graino el sistema controllato a catena chiusa con regolatore proporzionale, al variare el guaagno Margine i fase 6b: k i P.5Kp PI.45Kp.8 È presente l errore a regime perché non c è azione integrale PID.6Kp.5 /8

11 Sintesi con il metoo a catena aperta >> g/s+)*s+2)*s+)) s^3 + 3 s^ s + 2 >> stepg).5.45 Step Response Amplitue ime sec)
.5.45 Step Response.4.35.")
12 .5 Step Response Amplitue ime sec) G s).3s e.5 +.2s
13 >> gappr.5/+.2*s) s Step Response g gappr >> gappr.inputelay.3.5 exp-.3*s) * s + Amplitue >> stepg,gappr) ime sec)
.5.2.4.")
14 Proviamo a migliorare l approssimazione: >> gappr.5/+.5*s).5 Step Response s + >> gappr.inputelay.2.5 exp-.2*s) * s + Amplitue >> stepg,gappr) ime sec)

15 >> g.5/+.2*s) St ep Response g g s + >> g.inputelay.2.5 exp-.2*s) * s + >> stepg,g) Amplitue ime sec) La stima è sufficientemente accurata
 La stima è")
16 K.5.2 τ.5 s e P s) k R k / τ +τs K i P /R PI.9/R /.3 PID.2/R 2 /2 Regolatore proporzionale: >> tau.5 >> k.5 >>.2 >>Rk/tau >> kp/r*) kp 5.

17 Prestazioni el regolatore P >> wpfeebackkp*g,).5e s^3 + 3 s^ s +.7e5 >> wfeebackg,) Amplitue Step Response wp w s^3 + 3 s^ s + 2 >> stepwp,w) ime sec)

18 Regolatore PI Amplitue Step Response ime sec) Abbiamo annullato l errore a regime, la inamica non va bene wpi w wp P K i /R PI.9/R /.3 PID.2/R 2 /2 >> ti/.3 ti.666 >> kpi.9/r*) kpi 35. >> cpikp*+/ti*s)) s s >> wpifeebackcpi*g,) e4 s +.5e s^ s^ s^2 +.33e4 s +.5e5 >> stepwpi,w,wp)
 kpi 35.")
19 Amplitue Regolatore PID Step Response ime sec) Il transitorio è migliorato wpi wpi >> kpi.2/r*) kpi 8 >> ti2* ti.4 >> t.5* t. >> cpikpi*+/ti*s)+t*s).72 s^ s s >> wpifeebackcpi*g,) P K i /R PI.9/R /.3 PID.2/R 2 /2 72 s^ s +.8e s^ s^3 + 2 s^2 + 8 s +.8e5 >>
 kpi 8 >> ti2* ti.4 >> t.5* t. >> cpikpi*+/ti*s)+t*s).72 s^2 + 7.")
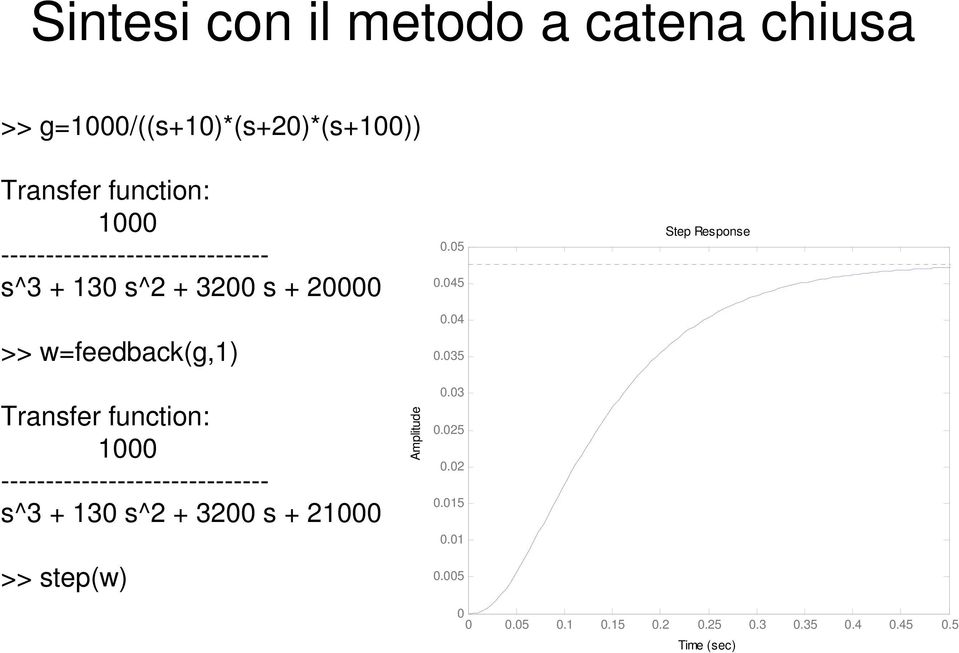
20 Sintesi con il metoo a catena chiusa >> g/s+)*s+2)*s+)) s^3 + 3 s^ s + 2 >> wfeebackg,) Step Response s^3 + 3 s^ s + 2 >> stepw) Amplitue ime sec)
21 Aumentiamo il guaagno el regolatore proporzionale.4 Step Response.2 >> wfeebackg*,) s^3 + 3 s^ s + 2 >> stepw) Amplitue ime sec)
22 Aumentiamo il guaagno el regolatore proporzionale >> wfeebackg*2,).5 Step Response s^3 + 3 s^ s + 22 >> stepw) Amplitue ime sec)
23 Aumentiamo ancora il guaagno.8 Step Response.8 Step Response Amplitue.8 Amplitue ime sec) ime sec) k3 k35
24 Step Response 2 Step Response Amplitue -2 Amplitue ime sec).5.5 ime sec) k4 k396 Scegliamo k396
25 >> kp396/2 kp 98 >> wpfeebackg*kp,) s^3 + 3 s^ s + 28 >> wfeebackg,) s^3 + 3 s^ s + 2 >> stepw,wp) Amplitue.5.5 Step Response ime sec) w wp
26 Calcoliamo il perioo: System: w ime sec):.39 Amplitue:.75 Step Response System: w ime sec):.55 Amplitue: Amplitue ime sec)
27 >> ti.8*. ti.88 >> cpikp*+/ti*s)) 5.68 s s >> wpifeebackcpi*g,) Step Response 2.568e4 s +.782e s^ s^ s^ e4 s +.782e5 >> stepwp,wpi).4.2 Si eve ancora migliorare la inamica, usiamo un PID Amplitue ime sec)
28 >> kpi.6*396 kpi Step Response >> ti.5*. ti.55 >> t.25*. t.375 >> cpikpi*+/ti*s)+t*s).797 s^ s s >> wpifeebackcpi*g,) 797 s^ s s^ s^ s^ s >> stepwpi) Amplitue ime sec)
29 Analisi in frequenza a ciclo aperto Boe Diagram 5 Magnitue B) -5 - Phase eg) P*g PI*g PID*g Frequency ra/sec)
30 Analisi in frequenza a ciclo chiuso 5 Boe Diagram Magnitue B) -5 - Phase eg) wp wpi wpi Frequency ra/sec)
31 Esercizio proposto Progettare, utilizzano sia il metoo i Ziegler e Nichols a catena aperta che quello a catena chiusa un regolatore P, un regolatore PI e un regolatore PID per il processo: g5/s+)*s+2)*s+5)) Analizzare le prestazioni ei regolatori progettati nel ominio el tempo e ella frequenza
32 Metoo analitico i taratura Si vuole moificare, tramite il regolatore PID, la funzione i risposta armonica il iagramma i Nyquist) el processo a una eterminata pulsazione OA: P ϖ ) exp arg P ϖ )) OB : C ϖ ) P ϖ ) exp arg C ϖ ) P ϖ ))
33 Si vuole quini che sia: )) arg )) arg ) arg ) ) ϖ ϖ ϖ ϖ P C OB P C OB + a cui: )) arg ) arg )) arg ) ) ϖ ϖ ϖ ϖ P OB C P OB C sceglieno: )) arg )) arg ) ) ϖ π ϖ ϖ ϖ ϕ P M C P C ) arg ha : si OB M OB t π ω ϖ ϕ
34 )) arg )) arg ) ) ϖ π ϖ ϖ ϖ ϕ P M C P C k i k ω ω ω) C )) arg ω C poiché: + i k k C ω ω ω ) Al variare ei parametri la fase introotta al PID varia tra -9 e 9 per un PD la variazione introotta è tra e 9 per un PI la variazione introotta è tra -9 e
35 Noti i valori i moulo e fase i Cs) alla pulsazione i attraversamento i possono quini ricavare i parametri alle formule: k C ω ω t t t ) ω i cosarg C ω t )) tanarg C ω t )) Poiché si hanno 3 parametri liberi e ue conizioni, si può imporre il valore esierato i errore alla rampa tramite la relazione: k v k i P) oppure imporre: i 4
36 P s) s specifiche : e _ step ω 2ra t Mϕ 3 + 2) s / sec + 5) esempio Serve un PI o PID tale che: C 2) ϕ C P 2) arctg C 2) P 2) 3 8 ϕ 2) arctg C ϕ C ,25 4,4 2) E un anticipo quini serve un PID
37 k i k ω ω ω) C )) arg ω C i i k C s s k s C 2 2 2) ) + + s s k s C tg k i i.2.8 ).8.2 4,4 6,8*2*4 2*2*4,8 2*4 2,8 2 2,25) 4,77 4,4 cos.25) 2 2
38 >> mop/sqrt2^2+2^2)*sqrt2^2+5^2)) mop.243 >> moc/mop moc >> fasec3-8+atan2/2)i+atan2/5) fasec.2532 >> kmoc*cosfasec) k tanfasec) ans.89 2*2*4 ans 6 >>.8*2*4 ans 4.4 >> roots[ ]) ans
39 >> ck*+/4*.29*s) +.29*s).372 s^ s s >>boep,p*c) Magnitue B) Phase eg) B oe Diagram senza PID -45 con PID Frequency ra/sec)
40 >> wfeebackp,).5 Step Response w wpi s^2 + 7 s + >> wpifeebackp*c,) Amplitue s^ s s^ s^ s >> stepw,wpi) ime sec)
41 Integratore ANIWINDUP
Corso di laurea in Informatica. Regolatori. Marta Capiluppi Dipartimento di Informatica Università di Verona
 Corso di laurea in Informatica Regolatori Marta Capiluppi [email protected] Dipartimento di Informatica Università di Verona Scelta delle specifiche 1. Picco di risonanza e massima sovraelongazione
Corso di laurea in Informatica Regolatori Marta Capiluppi [email protected] Dipartimento di Informatica Università di Verona Scelta delle specifiche 1. Picco di risonanza e massima sovraelongazione
Controlli Automatici
 Controlli Automatici (Prof. Casella) II Prova in Itinere 3 Luglio 2014 TRACCIA DI SOLUZIONE Domana 1 Si consieri il sistema i controllo schematizzato in figura. Definire la funzione i sensitività, illustrano
Controlli Automatici (Prof. Casella) II Prova in Itinere 3 Luglio 2014 TRACCIA DI SOLUZIONE Domana 1 Si consieri il sistema i controllo schematizzato in figura. Definire la funzione i sensitività, illustrano
REGOLATORI PID. Modello dei regolatori PID. Metodi di taratura automatica
 REGOLATORI PID Modello dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI PID Larga diffusione in ambito
REGOLATORI PID Modello dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI PID Larga diffusione in ambito
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
10. Regolatori standard PID
 Controlli Automatici 10. Regolatori standard PID Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it
Controlli Automatici 10. Regolatori standard PID Prof. Cesare Fantuzzi Ing. Cristian Secchi Ing. Federica Ferraguti ARSControl - DISMI - Università di Modena e Reggio Emilia E-mail: {nome.cognome}@unimore.it
Controlli Automatici T Regolatori PID
 Parte 10bis Aggiornamento: Settembre 2010 Parte 3, 1 Regolatori PID Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL: www-lar.deis.unibo.it/~lmarconi
Parte 10bis Aggiornamento: Settembre 2010 Parte 3, 1 Regolatori PID Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL: www-lar.deis.unibo.it/~lmarconi
REGOLATORI PID. Modello dei regolatori PID. Realizzazione dei regolatori PID. Metodi di taratura automatica
 REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI
REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1 MODELLO DEI REGOLATORI
Sintesi per tentativi nel dominio della frequenza
 Sintesi per tentativi nel dominio della frequenza Viene utilizzata per sistemi a fase minima affinchè sia valido il criterio di Bode e le relazioni approssimate tra le specifiche siano sufficientemente
Sintesi per tentativi nel dominio della frequenza Viene utilizzata per sistemi a fase minima affinchè sia valido il criterio di Bode e le relazioni approssimate tra le specifiche siano sufficientemente
RETI CORRETTRICI. Regolatori standard Alcune strutture standard di regolatori reti correttrici anticipo o ritardo 1 polo ed uno zero reali
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Luigi
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Luigi
= 2000) Controlli automatici LB 16/1/ Il regolatore
 Controlli automatici LB 16/1/ Il regolatore") Quiz A 1. La compensazione del segnale di riferimento in anello aperto: viene effettuata filtrando opportunamente l uscita misurata viene effettuata progettando un filtro che cancella totalmente la dinamica
Quiz A 1. La compensazione del segnale di riferimento in anello aperto: viene effettuata filtrando opportunamente l uscita misurata viene effettuata progettando un filtro che cancella totalmente la dinamica
RETI CORRETTRICI. Regolatori standard. lead) Rete di Anticipo (phase( SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo
 Rete di Anticipo (phase( SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo") SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html RETI CORRETTRICI Ing. Luigi Biagiotti e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html RETI CORRETTRICI Ing. Luigi Biagiotti e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo. RETI CORRETTRICI
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html RETI CORRETTRICI Ing. Luigi Biagiotti e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html RETI CORRETTRICI Ing. Luigi Biagiotti e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
Controllori Standard PID. Prof. Laura Giarré
 Controllori Standard PID Prof. Laura Giarré [email protected] https://giarre.wordpress.com/ca/ Regolatore Proporzionale, Integrale, Derivativo - PID + _ + + + Tre azioni di controllo combinate azione
Controllori Standard PID Prof. Laura Giarré [email protected] https://giarre.wordpress.com/ca/ Regolatore Proporzionale, Integrale, Derivativo - PID + _ + + + Tre azioni di controllo combinate azione
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html REGOLATORI STANDARD PID Ing. e-mail:
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html it/~lbiagiotti/sistemicontrollo html REGOLATORI STANDARD PID Ing. e-mail:
CONTROLLI AUTOMATICI Ingegneria Gestionale RETI CORRETTRICI
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Federica Grossi Tel. 59 256333 e-mail: [email protected]
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm RETI CORRETTRICI Ing. Federica Grossi Tel. 59 256333 e-mail: [email protected]
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm REGOLATORI STANDARD PID
REGOLATORI STANDARD PID + _ +
 CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/automazione%2industriale.htm Regolatori standard Regolatore Proporzionale, Integrale, Derivativo PID tre
CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/automazione%2industriale.htm Regolatori standard Regolatore Proporzionale, Integrale, Derivativo PID tre
Regolatori PID. Gianmaria De Tommasi 1. [email protected]. Ottobre 2012 Corsi AnsaldoBreda
 Regolatori PID Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II [email protected] Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Regolatori PID Napoli - Ottobre 2012 1 / 38
Regolatori PID Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II [email protected] Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Regolatori PID Napoli - Ottobre 2012 1 / 38
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Federica
CONTROLLI AUTOMATICI Ingegneria Gestionale http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE Ing. Federica
Controllo in retroazione: Progetto in Frequenza. Prof. Laura Giarré https://giarre.wordpress.com/ca/
 Controllo in retroazione: Progetto in Frequenza Prof. Laura Giarré [email protected] https://giarre.wordpress.com/ca/ Schema di riferimento per il controllo in retroazione Come già visto lo schema
Controllo in retroazione: Progetto in Frequenza Prof. Laura Giarré [email protected] https://giarre.wordpress.com/ca/ Schema di riferimento per il controllo in retroazione Come già visto lo schema
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale RETI CORRETTRICI
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale RETI CORRETTRICI Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti Regolatori
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale RETI CORRETTRICI Ing. Luigi Biagiotti Tel. 51 29334 / 51 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti Regolatori
Tecnologie dei Sistemi di Automazione
 Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
Facoltà di Ingegneria Tecnologie dei Sistemi di Automazione Prof. Gianmaria De Tommasi Lezione 5 Regolatori PID industriali: Taratura dei guadagni e problemi implementativi Corso di Laurea Codice insegnamento
Controlli Automatici 2 22/06/05 Compito a
 Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
Controlli Automatici 2 22/6/5 Compito a a) Si consideri il diagramma di Bode (modulo e fase) di G(s) in figura 1. Si 5 Bode Diagram 5 15 45 9 135 18 3 2 1 1 2 3 Frequency (rad/sec) Figure 1: Diagrammi
MODELLO COMPLETO PER IL CONTROLLO. D r (s) U(s) Y (s) d m (t): disturbi misurabili. d r (t): disturbi non misurabili
 U(s) Y (s) d m (t): disturbi misurabili. d r (t): disturbi non misurabili") MODELLO COMPLETO PER IL CONTROLLO D m (s) D r (s) Y o (s) U(s) P (s) Y (s) d m (t): disturbi misurabili d r (t): disturbi non misurabili y o (t): andamento desiderato della variabile controllata u(t):
MODELLO COMPLETO PER IL CONTROLLO D m (s) D r (s) Y o (s) U(s) P (s) Y (s) d m (t): disturbi misurabili d r (t): disturbi non misurabili y o (t): andamento desiderato della variabile controllata u(t):
Principali reti di compensazione
 Principali reti di compensazione Caratteristiche delle reti attenuatrici (1/5) Una rete attenuatrice o integrativa è descritta da una fdt della forma R (s) i = τ + mi 1+τs i 1 s i con τ >, m > 1 i i La
Principali reti di compensazione Caratteristiche delle reti attenuatrici (1/5) Una rete attenuatrice o integrativa è descritta da una fdt della forma R (s) i = τ + mi 1+τs i 1 s i con τ >, m > 1 i i La
Esercizi sulla discretizzazione
 Controlli digitali Esercizi sulla discretizzazione - Progetta un controllore digitale per il seguente sistema con P(s) = 3 400 (2 s)(s + 200), s(s + 2) assumendo un tempo di campionamento pari a T = 0.0s.
Controlli digitali Esercizi sulla discretizzazione - Progetta un controllore digitale per il seguente sistema con P(s) = 3 400 (2 s)(s + 200), s(s + 2) assumendo un tempo di campionamento pari a T = 0.0s.
Compito di Fondamenti di Automatica - 13 luglio 2006 Versione A Esercizio 1A. Dato lo schema seguente (operazionali ideali)
") Compito di Fondamenti di Automatica - 1 luglio 2006 Versione A Esercizio 1A. Dato lo schema seguente (operazionali ideali) C v in 2 vout é richiesto di calcolare la funzione di trasferimento G(s) tra v
Compito di Fondamenti di Automatica - 1 luglio 2006 Versione A Esercizio 1A. Dato lo schema seguente (operazionali ideali) C v in 2 vout é richiesto di calcolare la funzione di trasferimento G(s) tra v
Controlli Automatici T Esempi di progetto
 Parte 12 Aggiornamento: Dicembre 10 Parte 12, 1 Esempi di progetto Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL: www-lar.deis.unibo.it/~lmarconi
Parte 12 Aggiornamento: Dicembre 10 Parte 12, 1 Esempi di progetto Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL: www-lar.deis.unibo.it/~lmarconi
Sistemi di Controllo Esempio di domande teoriche a risposta multipla. Esempio di problemi e quesiti a risposta aperta
 Sistemi di Controllo Esempio di domande teoriche a risposta multipla Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte
Sistemi di Controllo Esempio di domande teoriche a risposta multipla Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti hanno più risposte
Controlli Automatici Compito del - Esercizi
 Compito del - Esercizi. Data la funzione di trasferimento G(s) = s (s +),sicalcoli a) La risposta impulsiva g(t); b) L equazione differenziale associata al sistema G(s); c) Si commenti la stabilità del
Compito del - Esercizi. Data la funzione di trasferimento G(s) = s (s +),sicalcoli a) La risposta impulsiva g(t); b) L equazione differenziale associata al sistema G(s); c) Si commenti la stabilità del
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 2003/ luglio Soluzione
 PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
PROVA SCRITTA DI FONDAMENTI DI AUTOMATICA A.A. 23/24 2 luglio 24 Esercizio In riferimento allo schema a blocchi in figura. s r y 2 s y K s2 Domanda.. Determinare una realizzazione in equazioni di stato
Prefazione 3. Ringraziamenti 5
 Indice Prefazione 3 Ringraziamenti 5 1 Introduzione all uso del software di calcolo MATLAB 7 1.1 Caratteristiche del software MATLAB 7 1.2 Nozioni di base del MATLAB 8 1.3 Assegnazione di variabili scalari
Indice Prefazione 3 Ringraziamenti 5 1 Introduzione all uso del software di calcolo MATLAB 7 1.1 Caratteristiche del software MATLAB 7 1.2 Nozioni di base del MATLAB 8 1.3 Assegnazione di variabili scalari
Sistemi di Controllo
 ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy [email protected] Programmazione Sistemi Robotici Massa su piano Supponiamo
ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Università di Catania, Italy [email protected] Programmazione Sistemi Robotici Massa su piano Supponiamo
a.a. 2015/2016 Docente: Stefano Bifaretti
 a.a. 2015/2016 Docente: Stefano Bifaretti email: [email protected] Controllo ad anello aperto Il filtro LC è necessario per ridurre le ondulazioni di corrente e di tensione ed è dimensionato in
a.a. 2015/2016 Docente: Stefano Bifaretti email: [email protected] Controllo ad anello aperto Il filtro LC è necessario per ridurre le ondulazioni di corrente e di tensione ed è dimensionato in
I CONTROLLORI PID. Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi:
 I CONTROLLORI PID Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi: Blocco Proporzionale Blocco Integrale Blocco Derivativo Funzione
I CONTROLLORI PID Sono controllori molto utilizzati in applicazioni industriali. Elaborazione del segnale di ingresso attraverso 3 blocchi: Blocco Proporzionale Blocco Integrale Blocco Derivativo Funzione
Sintesi di reti correttrici e progetto analitico di controllori PID
 Sintesi di reti correttrici e progetto analitico di controllori PID A. Ferrante January 4, 204 Il materiale esposto in questa nota è tratto da [] cui si rimanda per maggiori dettagli. Sintesi di Bode Si
Sintesi di reti correttrici e progetto analitico di controllori PID A. Ferrante January 4, 204 Il materiale esposto in questa nota è tratto da [] cui si rimanda per maggiori dettagli. Sintesi di Bode Si
Studio delle funzioni di sensitività
 Funzioni di sensitività - 1 Corso di Laurea in Ingegneria Meccanica Studio delle funzioni di sensitività DEIS-Università di Bologna Tel. 051 2093020 Email: [email protected] URL: www-lar.deis.unibo.it/~crossi
Funzioni di sensitività - 1 Corso di Laurea in Ingegneria Meccanica Studio delle funzioni di sensitività DEIS-Università di Bologna Tel. 051 2093020 Email: [email protected] URL: www-lar.deis.unibo.it/~crossi
CONTROLLORI STANDARD PID. Guido Vagliasindi Controlli Automatici A.A. 06/07 Controllori Standard PID
 ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione
ONTROLLORI STANDARD PID Guido Vagliasindi ontrolli Automatici A.A. 6/7 ontrollori Standard PID MODELLO DEI REGOLATORI PID Tra le ragioni del vastissimo utilizzo dei regolatori PID nella pratica dell automazione