Prova scritta di Controlli Automatici
|
|
|
- Angela Piazza
- 10 anni fa
- Просмотров:
Транскрипт
1 Prova scritta di Controlli Automatici Corso di Laurea in Ingegneria Meccatronica, AA Settembre 2012 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere V e quali sono le affermazioni false F. 1. Si consideri un sistema lineare e tempo invariante caratterizzato da una funzione di trasferimento pari a: G(s) = 1 s(3s 2 + 6) Si consideri di chiudere in retroazione unitaria il sistema con il controllore C(s), come nella seguente figura: e di applicare un ingresso di riferimento a gradino, allora è possibile affermare che: V F Per annullare l errore a regime E(s) = R(s) Y (s) occorre inserire un integratore nel controllore C(s). V F L annullamento dell errore a regime E(s) = R(s) Y (s) è garantito dalla presenza del polo nell origine, e quindi non occorre inserire un polo nel controllore. V F L errore a regime è indipendente dal numero di poli nell origine. Commento: Il sistema ha un polo nell origine, per cui è già garantito l annullamento dell errore a regime con ingresso di riferimento a gradino, senza dover aggiungere un polo nel controllore. L unica risposta corretta è la seconda. 1
, come nella seguente figura: e di applicare un ingresso di riferimento a gradino, allora è possibile affermare che: V F Per annullare l errore a regime E(s) = R(s) Y (s) occorre")
2 2. Si consideri il processo di linearizzazione di un modello matematico non lineare y(t) = f(u(t)) = sin(5u(t)) nell intorno del punto u 0 = 0; essendo u(t), l ingresso, y(t) l uscita. Il modello linearizzato vale: V F y(t) = 5u(t) V F y(t) = 5u(t) π V F y(t) = sin(5u(t)) Commento: La linearizzazione di una funzione non lineare sfrutta l approssimazione in polinomio di Taylor limitato al primo termine: y(t) = f(u 0 ) + df(u(t)) du(t) (u(t) u 0 ) u0 Applicado la precedente formula alla funzione proposta nel testo dell esercizio, otteniamo: f(u 0 ) = sin(5u 0 ) = sin(5 0) = 0; e quindi solo la risposta uno è corretta. df(t) du(t) = 5 cos(5u(t)) u0 = 5 cos(5 0) = 5 u0 3. Si consideri un sistema dinamico con un ingresso u(t) e uscita y(t) e si supponga che il suo comportamento sia descritto dalla seguente equazione differenziale ÿ(t) + 5y(t) = u(t) u(t) V F La funzione di trasferimento che descrive il sistema ha un solo polo, con moleplicità due ed uno zero. V F Il sistema non puó essere rappresentato da una funzione di trasferimento. V F Il sistema é instabile. Commento: Il sistema è descritto da una sistema differenziale lineare a coefficenti constanti del secondo ordine, e quindi è possibile applicare le trasformate di Laplace ottenendo che descrivibile con la funzione di trasferimento Y (s)(s 2 + 5) = U(s)(s 1) G(s) = s 1 s che ha due poli semplici sull asse immaginario pari a p 1, p 2 = ±j 5 e uno zero in z = +1. I due poli sono immaginari semplici, per cui il sistema é semplicemente stabile. Qundi tutte le risposte sone errate. 2
 du(t) = 5 cos(5u(t)) u0 = 5 cos(5 0) = 5 u0 3.")
3 4. Si consideri il sistema descritto dalla seguente funzione di trasferimento: V F É instabile. G(s) = V F Il sistema é semplicemente stabile. s 1 (s 2 + 1)(s + 5) V F La parte reale dello zero non influenza la stabilità del sistema Commento: Il sistema ha tre poli, due poli semplici immaginari puri p 1, p 2 = ±j e un polo in p 3 = 5 e uno zero in z 1 = +1. Siccome lo zero non ha influenza sulla stabilità del sistema e tutti i poli sono semplici e situati sull asse immaginario, il sistema è semplicmenete stabile. Quindi la prima risposte è errata, mentre la seconda e la terza sono corrrette. 5. Sia G(s) la funzione di trasferimento di un sistema lineare, tempo invariante e asintoticamente stabile. Si ecciti inoltre il sistema con un ingresso u(t) = X sin(ωt) V F A regime, l uscita è sempre per qualunque sistema un segnale sinusoidale di ampiezza tendente a zero per ω che tende all inifinito. V F A regime, l ampiezza del segnale d uscita dipende dalla pulsazione ω del segnale di ingresso V F A regime, il segnale d uscita ha un ritardo di fase che dipende dalla pulsazione ω. Commento: In base al teorema della Risposta Armonica, la risposta di un sistema lineare ad un segnale di ingresso sinusoidale X sin(ωt) vale: y(t) = X F (ω) sin(ωt + arg(f (ω)) e quindi solo la seconda e la terza risposte sono corrette. L andamento asintotico per ω che tende all inifinito dipende dai poli e agli zeri della funzione di trasferimento, e quindi la prima risposta è errata. 6. Si consideri il sistema descritto dalla funzione di trasferimento: H(s) = 1 s 2 + 3s + 2 Si calcoli la risposta all impulso h(t) di tale sistema e la si scriva nello spazio sottostante: h(t) = Commento: Per calcolare la risposta impulsiva occorre determinare la scomposizione in fratti semplici e quindi antitrasformare tali fratti semplici per determinare i modi del sistema: H(s) = 1 s 2 + 3s + 2 = 1 (s + 1)(s + 2) = c 1 s c 2 s + 2 3
 la funzione di trasferimento di un sistema lineare, tempo invariante e asintoticamente stabile.")
4 In base al teorema per il calcolo dei residui, otteniamo: c 1 = H(s)(s + 1) s= 1 = 1, c 2 = H(s)(s + 2) s= 2 = 1 da cui, applicando le regole di antitrasformazione: essendo step(t) la funzione a gradino unitario. 7. Il controllore PID: h(t) = step(t)(e t e 2t ) V F É dato dalla moltiplicazione dei tre termini corrispondenti alle tre azioni di controllo sull errore di regolazione. V F Le azioni di controllo del PID sono rispettivamente, proporzionali all errore, all integrale dell errore e alla derivata dell errore. V F Il PID nella sua forma standard, con tutte e tre i termini ha una rappresentazione come funzione di trasferimento con un polo e uno zero. Commento: Il modello matematico del controllore PID è descritto dalla somma dei tre termini: u(t) = K p (e(t) + 1 T i t Quindi la prima risposta è errata e la seconda è corretta. 0 e(τ)dτ + T d de(t) dt Andando a descrivere la funzione di trasferimento del PID, otteniamo: U(s) = K pt i s + K p + K p T i T d s 2 T i s e quindi un polo e due zeri (si noti che nella forma standard, il PID non è fisicamente realizzabile), e quindi la terza risposta è sbagliata. 8. Consideriamo il sistema dinamico descritto dalla equazione di stato: La sua evoluzione libera (free dynamics) è: V F x(t) = e At x(0) V F x(t) = e At x(t) V F x(t) = e Bt x(0) ẋ(t) = Ax(t) + Bu(t) y(t) = Cx(t) Commento: In base alla proprietà della risposta libera di un sistema dinamico descritto mediante variabili di stato, la risposta corretta à la prima. 9. I diagrammi di Bode 4

5 V F Sono una possibile rappresentazione della funzione di risposta armonica V F Sono in scala logaritmica V F Un diagramma di bode di sistemi può essere ottenuto come somma di diagrammi elementari, ciascuno dei quali corrispondenti a poli e zeri (reali o complessi). Commento: I diagrammi di Bode rappresentano il modulo, espresso in decibel, e l argomento, espresso in gradi o radianti, della funzione di risposta armonica rispetto al logaritmo in base dieci della pulsazione del segnale di ingresso. In base alle proprietà dei logaritmi e delle funzioni trigonometriche, un diagramma di bode può essere costruito sommando diagrammi elementari. Quindi tutte le risposte sono corrette. 10. Si consideri un sistema lineare e tempo invariante caratterizzato da un ingresso u(t) e un uscita y(t) e descritto dalla seguente equazione differenziale 9 d2 y(t) dt 2 + 4y(t) = d2 u(t) dt 2 V F Il sistema è descritto dalla funzione di trasferimento G(s) = s2 9s V F Il sistema non è fisicamente realizzabile. V F La costante di posizione del sistema è 0. Commento: Applicando la trasformata di Laplace alla equazione sopra riportata, si ottiene: (9s 2 + 4)Y (s) = s 2 U(s) da cui si ricava esattamente l equazione riportata nella prima risposta, che è quindi corretta. La Funzione di Treasferimento è inoltre strettamente propria (grado del numeratore è strettamente minore al grado del denominatore) e quindi il sistema è fisicamente realizzabile, e quindi la seconda risposta è errata. La costante di posizione di un sistema dinamico è calcolata come: e quindi la terza risposta è corretta. K p = lim s 0 G(s) = I seguenti esempi di variabili fisiche sono di tipo through, cioè definiscono il valore uniforme che assume la proprietà fisica attraverso il componente da modellare: V F La tensione ai capi di una resistenza, la velocità di un componente fisico, la pressione di un fluido. V F La corrente che fluisce attraverso una resistenza, la forza che viene esercitata su un componente fisico, il flusso di un fluido. V F Nessuna delle variabili descritte nelle precedenti risposte. Commento: La variabile through definisce il valore di una grandezza fisica che rimane costante nell attraversamento di un componente, come ad esempio la corrente che fluisce attraverso una resistenza, la forza che viene esercitata su un corpo fisico, il flusso di un fluido. La prima risposta è corretta, la seconda e terza sono errate. 5

6 12. Si consideri il sistema rappresentato in figura V F Al variare di K, i poli di G(s) rimangono constanti, in altre parole non variano al variare di K. V F Il valore di K influenza la relazione tra R(s) e Y (s) V F Il luogo delle radici rappresenta il luogo tracciato dai poli di G tot (s) = Y (s) R(s) al variare di K da 0 a. Commento: Sia data la funzione di trasferimento G(s) di un sistema, il luogo delle radici corrisponde ai punti corrispondenti alle soluzioni della equazione: 1 + KG(s) = 0 essendo il polinomio 1 + KG(s) il numeratore della funzione di trasferimento G tot, e quindi la prima risposta è corretta. La seconda è corretta in quanto il guadagno K influenza direttamente il rapporto fra R(s) e Y (s), mentre l ultima è ancora corretta in quanto è la definizione del luogo delle radici. 13. La stabilità di un sistema lineare tempo-invariante descritto da una funzione di trasferimento G(s) V F Dipende dal carattere di convergenza dei modi del sistema. V F Dipende dalla parte immaginaria dei poli della funzione di trasferimento G(s). V F Può dipendere dalla molteplicità dei poli della funzione di trasferimento G(s). Commento: In base alla teoria sulla stabilità dei sistemi dinamici lineari, la prima risposta è corretta, mentre la seconda è errata, in quanto la stabilità dipende solo dal segno della parte reale dei poli (la parte immaginaria influisce sulla caratteristica di sovraelongazione della risposta). La terza risposta è corretta in quanto la molteplicità i poli nell origine influenza il carattere di stabilità, che può essere di semplice stabilità per poli semplici, e di instabilità per poli multipli. 14. Si consideri un sistema descritto da G(s) = 10 s+20 e lo si ecciti con un gradino di ampiezza unitaria V F Il segnale di uscita y(t) per t è pari a 0.5. V F Il tempo di assestamento è approssimativamente pari a t s V F La massima sovraelongazione percentuale è nulla. Commento: Il sistema è del primo ordine. Il valore del segnale di uscita a regime si pò calcolare con il teorema del valore finale, una volta che si sia applicato un gradino di ampiezza unitaria pari a U(s) = 1/s e vale: 6
 il numeratore della funzione di trasferimento G tot, e quindi la prima risposta è corretta.")
7 lim y(t) = lim s G(s)1 t s 0 s = 0.5 e quindi la prima risposta è corretta. Il tempo di assestamento t s 3τ = 3 p = 3 20 essendo τ la costante di tempo e p = 20 il polo, e quindi la seconda risposta è errata, mentre la terza è corretta, in quanto un sistema del primo ordine non ha sovraelongazione della risposta. 15. Si consideri lo schema a blocchi riportato nella figura che segue, si scriva nello spazio sottostante l equazione di traserimento G tot (s) = Y (s) R (s) = Commento: In base alla analisi dello schema a blocchi è possibile scrivere: da cui: Y (s) = H(s)(G(s)R(s) M(s)Y (s)) e quindi: Y (s) = H(s)G(s)R(s) H(s)M(s)Y (s) G tot (s) = Y (s) R (s) = H(s)G(s) 1 + H(s)M(s) 7
 = Y (s) R (s) = Commento: In")
8 Si svolgano i seguenti esercizi indicando chiaramente i passaggi seguiti per raggiungere la soluzione Esercizio 1 Si tracci il Diagramma di Bode delle Ampiezze e delle Fasi della funzione di trasferimento: G(s) = s2 + s + 1 s 2 (s + 10) Commento: Il tracciamento dei diagrammi di Bode passa necessita dei seguenti passaggi: 1. Riscrivere la Funzione di trasferimento nella forma con costanti di tempo: ω n + s2 ω 2 n G(s) = s2 + s + 1 s 2 (s + 10) = K 1 + 2ζ s s 2 (1 + τs) dove si calcolano gli zeri e i poli del sitema, ottenendo quindi: z 1, z 2 = 1 2 ± j = 0.5 ± j0.866 ω n = 1 ζ = 0.5 K = 0.1 p 1, p 2 = 0 p 3 = 10 τ = 0.1 da cui: F (ω) = s + s2 (1 ω 2 ) + jω s 2 (s ) = 0.1 s=jω ω 2 (1 + jω 0.1) 2. Consideriamo quindi i quattro termini elementari in cui si può pensare scomponibile la funzione di risposta armonica F (ω): (a) K = 0.1, che espresso in Decibel vale 20Log = 20 db. (b) (1 ω 2 ) + jω, il cui diagramma di bode nelle ampiezze ha il punto di rottura in corrispondenza di ω n = 1 = 10 0 (in scala logaritmica), mentre il diagrmma delle fasi ha i due punti ω a = ( ) 1 = 0.45 e ω b = ( ) = 2.2, per cui il diagramma di Bode è visualizzabile nella seguente figura: 8
 = 0.1 1 + s + s2 (1 ω 2 ) + jω s 2 (s0.1 + 1) = 0.1 s=jω ω 2 (1 + jω 0.")
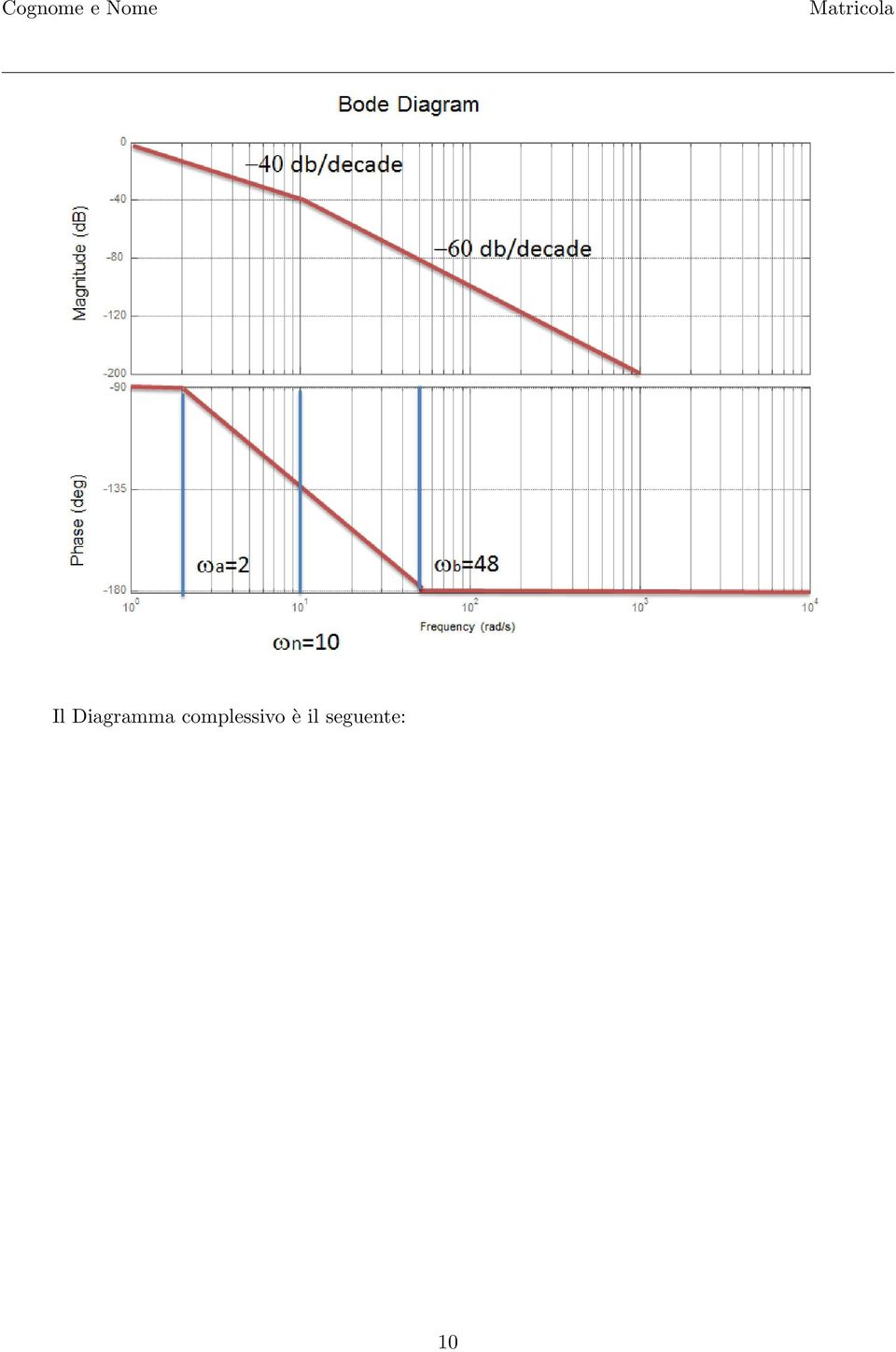
9 1 1 (c) e ω 2 (1+τs), per cui si può tracciare il seguente diagramma di Bode, in cui il punto di rottura del polo in p = 10 è pari a ω n = Prima di tale punto si ha l effetto dei due poli nell orgine, che comportano una variazione nel diagramma delle ampiezze di 40 db/decade e un ritardo di fase di 180 o. L effetto del polo in p = 10 porta un diagramma delle fasi con ω a = 10/ e ω b 48. Dopo il punto di rottura, il diagramma continua con un incremento di variazione del diagramma delle ampiezze complessivo di 60 db/decade. 9

10 Il Diagramma complessivo è il seguente: 10
11 Esercizio 2 Si consideri il sistema riportato in figura dove G(s) = (s 2 + 2s + 17) (s 3)(s + 5)(s + 20) Si tracci il luogo delle radici del sistema chiuso in retroazione al variare di K da 0 a. IMPORTANTE: si elenchino e descrivino le regole applicate per il tracciamento del luogo delle radici. Commento: Applichiamo le regole di tracciamento: 1. Il luogo delle radici inizia sui poli e termina sugli zeri o all infinito. Identifichiamo quindi i poli e gli zeri del sistema. 11

12 Il sistema ha tre poli in p 1 = 3, p 2 = 5 e p 3 = 20, e due zeri complessi coniugati in z 1, z 2 = 1 ± j4. Il luogo delle radici avrà quindi un asintoto verso infinito (eccedenza di poli rispetto agli zeri). 2. I punti dell asse reale che lasciano alla propria destra un numero dispari di zeri o poli fanno parte del luogo delle radici. Sull asse reale vi sono tre poli, per cui: la parte di asse reale a sinistra del polo p 3 la parte di asse reale compreso tra i poli p 1 e p 2. appartengono al luogo delle radici. 3. Per quanto affermato prima, l asintoto appartiene coincide con l asse reale negativo con punto iniziale in p Le due radici p 1 e p 2 si muovono incontrandosi sull asse reale (in quanto la porzione di asse reale tra p 1 e p 2 è luogo delle radici), abbandonano quindi l asse reale per andare sugli zeri, per K che tende all infinito. 5. Il luogo delle radici è simmetrico rispetto all asse immaginario, in quanto per ogni radice complessa vi deve essere necessariamente il suo valore coniugato. Il luogo delle radici é quindi rappresentato nelle figura seguente 12

13 Esercizio 3 Dato il modello di un sistema dinamico: ẋ 1 = x 2 (t) + u(t) ẋ 2 = x 1 (t) + u(t) y(t) = x 1 (t) + x 2 (t) 1. Descrivere il sistema dinamico mediante un modello nello spazio degli stati. 2. Scrivere le matrici A, B, C che descrivono il sistema secondo il modello nello spazio degli stati. 3. si retroazioni quindi il sistema mediante retroazione dello stato e si scriva le equazioni del modello che descrive il sistema con retroazione dello stato u = K x. 4. si progetti quindi il vettore di retroazione K, tale che le seguenti specifiche siano rispettate: Tempo di assestamento minore a t a < 0.6 secondi. Massimo sorpasso percentuale inferiore al S % < 16% (si utilizzi il seguente grafico che definisce la relazione tra sorpasso percentuale e coefficiente di smorzamento). Commento: 1. Il modello nello spazio degli stati vale: 2. Le matrici A, B e C sono: A = [ ẋ1 ẋ 2 = [ [ [ x1 x 2 y(t) = [ 1 1 [ x 1 x 2 [ 0, B = 0.5 [ u, C = [

14 3. il controllo con retroazione dello stato vale: u = [ k 1 k 2 [ x 1 x 2 per cui si ottiene: [ ẋ1 ẋ 2 = [ [ x1 x 2 [ [ k1 k 2 [ x 1 x 2 e quindi: [ ẋ1 ẋ 2 = ([ [ [ k1 k 2 ) [ x 1 x 2 ottenendo che: [ ẋ1 ẋ 2 [ = k 1 k k 1 1 k 2 [ x1 x 2 = A x 4. In relazione al terzo quesito, identifichiamo una coppia di poli che soddisfi le specifiche fornite per il massimo sorpasso percentuale e il tempo di assestamento. In particolare, per soddisfare la specifica sul massimo sorpasso percentuale S % < 16%, in base al grafico identifichiamo il valore ζ < 0.5. Per soddisfare la specifica sul tempo di assestamento, fissiamo: per cui: t a 3 ζω n < 0.6 ζω n > In particolare, assegnamo un massimo sorpasso percentuale nullo, a cui corrispondono due poli reali, e, tra le scelte possibili, li consideriamo coincidenti, con parte reale scelta in modo da soddisfare la specifica sul tempo di assestamento, scegliendo, quindi, come esempio, il valore ζω n = 6 e quindi ζ = 1 e ω n = 6. Quindi il polinomio caratteristico desiderato per il sistema chiuso in retroazione vale: p(λ) = (λ + 6)(λ + 6) = λ λ + 36 Il polinomio caratteristico del sistema in retroazione vale: ([ det(λi A k1 + λ 1 k ) = det 2 1 k 1 k 2 + λ ) = λ 2 + λ( k 1 k 2 ) + 1 k 1 + k 2 Uguagliando il coefficiente del polinomio caratteristico desiderato con quello ottenuto nella formula precedente, otteniamo i valori per i coefficienti di retroazione k 1 = 47 2 e k 2 =

Prova scritta di Controlli Automatici - Compito A
 Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Prova scritta di Controlli Automatici - Compito A 21 Marzo 27 Domande a Risposta Multipla Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni vere. 1. Si consideri
Nome: Nr. Mat. Firma:
 Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Fondamenti di Controlli Automatici - A.A. 7/8 4 Dicembre 7 - Esercizi Compito A Nr. Nome: Nr. Mat. Firma: a) Determinare la trasformata di Laplace X i (s) dei seguenti segnali temporali x i (t): x (t)
Nome: Nr. Mat. Firma:
 Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici - A.A. 1/11 Ingegneria Gestionale 13 Settembre 11 - Esercizi Nome: Nr. Mat. Firma: Rispondere alle seguenti domande. a) Calcolare la trasformata di Laplace X(s) dei seguenti segnali
Controlli Automatici T. Trasformata di Laplace e Funzione di trasferimento. Parte 3 Aggiornamento: Settembre 2010. Prof. L.
 Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL:
Parte 3 Aggiornamento: Settembre 2010 Parte 3, 1 Trasformata di Laplace e Funzione di trasferimento Prof. Lorenzo Marconi DEIS-Università di Bologna Tel. 051 2093788 Email: [email protected] URL:
LA FUNZIONE DI TRASFERIMENTO
 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della s che nel dominio della j Definizione nel dominio della s. è riferita ai soli sistemi con un ingresso ed un uscita 2. ha per oggetto
Fondamenti di Automatica
 Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected] pag. 1
Fondamenti di Automatica Risposte canoniche e sistemi elementari Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail: [email protected] pag. 1
La funzione di risposta armonica
 0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
0.0. 3.1 1 La funzione di risposta armonica Se ad un sistema lineare stazionario asintoticamente stabile si applica in ingresso un segnale sinusoidale x(t) = sen ωt di pulsazione ω: x(t) = sin ωt (s) =
Consideriamo due polinomi
 Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
Capitolo 3 Il luogo delle radici Consideriamo due polinomi N(z) = (z z 1 )(z z 2 )... (z z m ) D(z) = (z p 1 )(z p 2 )... (z p n ) della variabile complessa z con m < n. Nelle problematiche connesse al
2.5 Stabilità dei sistemi dinamici 20. - funzioni di trasferimento, nella variabile di Laplace s, razionali fratte del tipo:
 .5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
.5 Stabilità dei sistemi dinamici 9 Risulta: 3 ( s(s + 4).5 Stabilità dei sistemi dinamici Si è visto come un sistema fisico può essere descritto tramite equazioni differenziali o attraverso una funzione
SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica SPECIFICHE DI PROGETTO DI SISTEMI DI CONTROLLO Ing. Cristian Secchi Tel. 0522 522235 e-mail: [email protected]
Il luogo delle radici (ver. 1.0)
") Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
Il luogo delle radici (ver. 1.0) 1 Sia dato il sistema in retroazione riportato in Fig. 1.1. Il luogo delle radici è uno strumento mediante il quale è possibile valutare la posizione dei poli della funzione
ANALISI FREQUENZIALE E PROGETTO NEL DOMINIO DELLE FREQUENZE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale e della Integrazione di Impresa http://www.automazione.ingre.unimore.it/pages/corsi/controlliautomaticigestionale.htm ANALISI FREQUENZIALE E PROGETTO
Risposta temporale: esercizi
 ...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
...4 Risposta temporale: esercizi Esercizio. Calcolare la risposta al gradino del seguente sistema: G(s) X(s) = s (s+)(s+) Y(s) Per ottenere la risposta al gradino occorre antitrasformare la seguente funzione:
Una definizione di stabilità più completa di quella precedentemente introdotta fa riferimento ad una sollecitazione impulsiva.
 2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
2. Stabilità Uno dei requisiti più importanti richiesti ad un sistema di controllo è la stabilità, ossia la capacita del. sistema di raggiungere un stato di equilibrio dopo la fase di regolazione. Per
Fondamenti di Automatica. Unità 2 Calcolo del movimento di sistemi dinamici LTI
 Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica Unità 2 Calcolo del movimento di sistemi dinamici LTI Calcolo del movimento di sistemi dinamici LTI Soluzione delle equazioni di stato per sistemi dinamici LTI a tempo continuo
Fondamenti di Automatica
 Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Fondamenti di Automatica Funzioni di trasferimento: stabilità, errore a regime e luogo delle radici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 0532 974839 E-mail:
Richiami: funzione di trasferimento e risposta al gradino
 Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Richiami: funzione di trasferimento e risposta al gradino 1 Funzione di trasferimento La funzione di trasferimento di un sistema lineare è il rapporto di due polinomi della variabile complessa s. Essa
Fondamenti di Automatica
 Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. Analisi
Fondamenti di Automatica Analisi armonica e metodi grafici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. Analisi
Diagrammi di Bode. I Diagrammi di Bode sono due: 1) il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione
 il diagramma delle ampiezze rappresenta α = ln G(jω) in funzione") 0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
0.0. 3.2 Diagrammi di Bode Possibili rappresentazioni grafiche della funzione di risposta armonica F (ω) = G(jω) sono: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols. I Diagrammi
Sistema dinamico a tempo continuo
 Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Sistema dinamico a tempo continuo Un sistema è un modello matematico di un fenomeno fisico: esso comprende le cause e gli effetti relativi al fenomeno, nonché la relazione matematica che li lega. X INGRESSO
Fondamenti di Automatica
 Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. 1
Fondamenti di Automatica Progetto di controllo e reti correttrici Dott. Ing. Marcello Bonfè Dipartimento di Ingegneria - Università di Ferrara Tel. +39 053 974839 E-mail: [email protected] pag. 1
Capitolo. La funzione di trasferimento. 2.1 Funzione di trasferimento di un sistema. 2.2 L-trasformazione dei componenti R - L - C
 Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Capitolo La funzione di trasferimento. Funzione di trasferimento di un sistema.. L-trasformazione dei componenti R - L - C. Determinazione delle f.d.t. di circuiti elettrici..3 Risposta al gradino . Funzione
Diagrammi di Bode. delle
 .. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
.. 3.2 delle Diagrammi di Bode La funzione di risposta armonica F(ω) = G(jω) può essere rappresentata graficamente in tre modi diversi: i Diagrammi di Bode, i Diagrammi di Nyquist e i Diagrammi di Nichols.
Catene di Misura. Corso di Misure Elettriche http://sms.unipv.it/misure/
 Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia [email protected] Piero Malcovati
Catene di Misura Corso di Misure Elettriche http://sms.unipv.it/misure/ Piero Malcovati Dipartimento di Ingegneria Industriale e dell Informazione Università di Pavia [email protected] Piero Malcovati
Prestazioni dei sistemi in retroazione
 Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
Prestazioni dei sistemi in retroazione (ver..2). Sensitività e sensitività complementare Sia dato il sistema in retroazione riportato in Fig... Vogliamo determinare quanto è sensibile il sistema in anello
FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI
 FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI Guida alla soluzione degli esercizi d esame Dott. Ing. Marcello Bonfè Esercizi sulla scomposizione di modelli nello spazio degli stati: Gli esercizi nei
FONDAMENTI DI AUTOMATICA / CONTROLLI AUTOMATICI Guida alla soluzione degli esercizi d esame Dott. Ing. Marcello Bonfè Esercizi sulla scomposizione di modelli nello spazio degli stati: Gli esercizi nei
Controllo di velocità angolare di un motore in CC
 Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Controllo di velocità angolare di un motore in CC Descrizione generale Il processo è composto da un motore in corrente continua, un sistema di riduzione, una dinamo tachimetrica ed un sistema di visualizzazione.
Come visto precedentemente l equazione integro differenziale rappresentativa dell equilibrio elettrico di un circuito RLC è la seguente: 1 = (1)
") Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori Analisi nel dominio del tempo Ricordiamo che si definisce transitorio il periodo di tempo che intercorre nel passaggio, di un sistema, da uno stato energetico ad un altro, non è comunque sempre
Transitori del primo ordine
 Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Università di Ferrara Corso di Elettrotecnica Transitori del primo ordine Si consideri il circuito in figura, composto da un generatore ideale di tensione, una resistenza ed una capacità. I tre bipoli
Funzioni di trasferimento. Lezione 14 2
 Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Lezione 14 1 Funzioni di trasferimento Lezione 14 2 Introduzione Lezione 14 3 Cosa c è nell Unità 4 In questa sezione si affronteranno: Introduzione Uso dei decibel e delle scale logaritmiche Diagrammi
Politecnico di Milano. Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15 Prof. Silvia Strada Prima prova intermedia 28 Novembre 2014 SOLUZIONE
 a.a.2014-15 Prof. Silvia Strada Prima prova intermedia 28 Novembre 2014 SOLUZIONE") Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.014-15 Prof. Silvia Strada Prima prova intermedia 8 Novembre 014 SOLUZIONE ESERCIZIO 1 punti: 8 su 3 Si consideri il sistema dinamico
Politecnico di Milano Fondamenti di Automatica (CL Ing. Gestionale) a.a.014-15 Prof. Silvia Strada Prima prova intermedia 8 Novembre 014 SOLUZIONE ESERCIZIO 1 punti: 8 su 3 Si consideri il sistema dinamico
Cristian Secchi Pag. 1
 INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: [email protected]
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Laurea Specialistica in Ingegneria Meccatronica STRUMENTI MATEMATICI PER L ANALISI DEI SISTEMI DISCRETI Ing. Tel. 0522 522235 e-mail: [email protected]
Esercizi proposti di Fondamenti di Automatica - Parte 4
 Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi proposti di Fondamenti di Automatica - Parte 4 2 Aprile 26 Sia dato il sistema di controllo a controreazione di Fig. 1, in cui il processo ha funzione di trasferimento P (s) = 1 (1 +.1s)(1 +.1s).
Esercizi svolti. 1. Si consideri la funzione f(x) = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di
 = 4 x 2. a) Verificare che la funzione F(x) = x 2 4 x2 + 2 arcsin x è una primitiva di") Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Esercizi svolti. Si consideri la funzione f() 4. a) Verificare che la funzione F() 4 + arcsin è una primitiva di f() sull intervallo (, ). b) Verificare che la funzione G() 4 + arcsin π è la primitiva
Trasformate di Laplace
 TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
TdL 1 TdL 2 Trasformate di Laplace La trasformata di Laplace e un OPERATORE funzionale Importanza dei modelli dinamici Risolvere equazioni differenziali (lineari a coefficienti costanti) Tempo t Dominio
CORSO di AUTOMAZIONE INDUSTRIALE
 CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
CORSO di AUTOMAZIONE INDUSTRIALE (cod. 8469) APPELLO del 10 Novembre 2010 Prof. Emanuele Carpanzano Soluzioni Esercizio 1 (Domande generali) 1.a) Controllo Modulante Tracciare qualitativamente la risposta
Differenziazione sistemi dinamici
 Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Il controllo di sistemi ad avanzamento temporale si basa sulle tecniche di controllo in retroazione, ovvero, elabora le informazione sullo stato del processo (provenienti dai sensori) in modo sa inviare
Un sistema di controllo può essere progettato fissando le specifiche:
 3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
3. Specifiche dei Sistemi Un sistema di controllo può essere progettato fissando le specifiche: nel dominio del tempo (tempo di salita, tempo di assestamento, sovraelongazione, ecc.); nel dominio della
La trasformata Zeta. Marco Marcon
 La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
La trasformata Zeta Marco Marcon ENS Trasformata zeta E l estensione nel caso discreto della trasformata di Laplace. Applicata all analisi dei sistemi LTI permette di scrivere in modo diretto la relazione
OUT. Domande per Terza prova di Sistemi. Disegnare la struttura generale di un sistema di controllo. retroazionato. (schema a blocchi)
") Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
Domande per Terza prova di Sistemi Disegnare la struttura generale di un sistema di controllo retroazionato. (schema a blocchi) IN Amp. di Potenza Organo di Regolazione OUT ( ) Regolatore Attuatore Sistema
CONTROLLO NEL DOMINIO DELLA FREQUENZA
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: [email protected]
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html CONTROLLO NEL DOMINIO DELLA FREQUENZA Ing. Luigi Biagiotti e-mail: [email protected]
EQUAZIONI DIFFERENZIALI. 1. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6
 x = x 2 log t (d) x = e t x log x (e) y = y2 5y+6") EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
EQUAZIONI DIFFERENZIALI.. Trovare tutte le soluzioni delle equazioni differenziali: (a) x = x log t (d) x = e t x log x (e) y = y 5y+6 (f) y = ty +t t +y (g) y = y (h) xy = y (i) y y y = 0 (j) x = x (k)
Segnali e Sistemi. Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici. Gianni Borghesan e Giovanni Marro
 Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
Segnali e Sistemi Dispensa integrativa per l insegnamento di Elementi di Controlli Automatici Gianni Borghesan e Giovanni Marro Indice Introduzione 2. Notazione............................. 2 2 Classificazione
ESERCITAZIONE (7-11-13) Ing. Stefano Botelli
 Ing. Stefano Botelli") FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
FONDAMENTI di AUTOMATICA ESERCITAZIONE (7-11-13) Ing. Stefano Botelli NB in presenza di matrici 3x3 bisogna intuire che esiste un metodo risolutivo particolare perchè non verrà mai richiesto a lezione
LE FUNZIONI A DUE VARIABILI
 Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Capitolo I LE FUNZIONI A DUE VARIABILI In questo primo capitolo introduciamo alcune definizioni di base delle funzioni reali a due variabili reali. Nel seguito R denoterà l insieme dei numeri reali mentre
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [[email protected]]
![Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]](/thumbs/24/2724545.jpg "Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3. Danilo Caporale [caporale@elet.polimi.it]") Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [[email protected]] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 2/3 Danilo Caporale [[email protected]] Outline 2 Funzione di trasferimento e risposta in frequenza Diagrammi di Bode e teorema
la funzione è definita la funzione non è definita Si osservi, infatti, che la radice di un numero negativo non esiste nel campo dei numeri reali.
 1 y 4 CAMPO DI ESISTENZA. Poiché data è una irrazionale con indice di radice pari, il cui radicando è un polinomio, essa risulta definita solo per i valori della per i quali il radicando è positivo, ovvero
1 y 4 CAMPO DI ESISTENZA. Poiché data è una irrazionale con indice di radice pari, il cui radicando è un polinomio, essa risulta definita solo per i valori della per i quali il radicando è positivo, ovvero
Stabilità dei sistemi
 Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Stabilità dei sistemi + G(s) G(s) - H(s) Retroazionati Sistemi - Stabilità - Rielaborazione di Piero Scotto 1 Sommario In questa lezione si tratteranno: La funzione di trasferimento dei sistemi retroazionati
Rappresentazione nello spazio degli stati
 Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Chapter 1 Rappresentazione nello spazio degli stati La modellazione di un sistema lineare di ordine n, fornisce un insieme di equazioni differenziali che una volta trasformate nel dominio discreto, possono
Controllori PID, metodi di taratura e problemi d implementazione
 Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
Controllori PID, metodi di taratura e problemi d implementazione Prof. Luigi Glielmo Università del Sannio L. Glielmo 1 / 23 Contenuto della presentazione Controllori PID Metodi di taratura in anello aperto
REGOLATORI STANDARD PID
 SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
SISTEMI DI CONTROLLO Ingegneria Meccanica e Ingegneria del Veicolo http://www.dii.unimore.it/~lbiagiotti/sistemicontrollo.html Regolatore Proporzionale, Integrale, Derivativo - PID Tre azioni di combinate
Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R
 R R") Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
Studio di funzione Per studio di funzione intendiamo un insieme di procedure che hanno lo scopo di analizzare le proprietà di una funzione f ( x) R R : allo scopo di determinarne le caratteristiche principali.
I appello - 24 Marzo 2006
 Facoltà di Ingegneria - Corso di Laurea in Ing. Energetica e Gestionale A.A.2005/2006 I appello - 24 Marzo 2006 Risolvere gli esercizi motivando tutte le risposte. I.) Studiare la convergenza puntuale,
Facoltà di Ingegneria - Corso di Laurea in Ing. Energetica e Gestionale A.A.2005/2006 I appello - 24 Marzo 2006 Risolvere gli esercizi motivando tutte le risposte. I.) Studiare la convergenza puntuale,
CONCETTO DI LIMITE DI UNA FUNZIONE REALE
 CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
CONCETTO DI LIMITE DI UNA FUNZIONE REALE Il limite di una funzione è uno dei concetti fondamentali dell'analisi matematica. Tramite questo concetto viene formalizzata la nozione di funzione continua e
Orlando Allocca Regolatori standard
 A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it [email protected] via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
A09 159 Orlando Allocca Regolatori standard Copyright MMXII ARACNE editrice S.r.l. www.aracneeditrice.it [email protected] via Raffaele Garofalo, 133/A B 00173 Roma (06) 93781065 ISBN 978-88-548-4882-7
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale CONTROLLO IN RETROAZIONE Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
UNIVERSITÀ DEGLI STUDI DI TERAMO
 UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN ECONOMIA BANCARIA FINANZIARIA ED ASSICURATIVA (Classe 7) Corso di Matematica per l Economia (Prof. F. Eugeni) TEST DI INGRESSO Teramo, ottobre 00 SEZIONE
UNIVERSITÀ DEGLI STUDI DI TERAMO CORSO DI LAUREA IN ECONOMIA BANCARIA FINANZIARIA ED ASSICURATIVA (Classe 7) Corso di Matematica per l Economia (Prof. F. Eugeni) TEST DI INGRESSO Teramo, ottobre 00 SEZIONE
ESAME DI STATO DI LICEO SCIENTIFICO CORSO SPERIMENTALE P.N.I. 2004
 ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
ESAME DI STAT DI LICE SCIENTIFIC CRS SPERIMENTALE P.N.I. 004 Il candidato risolva uno dei due problemi e 5 dei 0 quesiti in cui si articola il questionario. PRBLEMA Sia la curva d equazione: ke ove k e
Luigi Piroddi [email protected]
 Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi [email protected] Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Automazione industriale dispense del corso 10. Reti di Petri: analisi strutturale Luigi Piroddi [email protected] Analisi strutturale Un alternativa all analisi esaustiva basata sul grafo di raggiungibilità,
Matematica 1 - Corso di Laurea in Ingegneria Meccanica
 Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
Matematica 1 - Corso di Laurea in Ingegneria Meccanica Esercitazione su massimi e minimi vincolati 9 dicembre 005 Esercizio 1. Considerare l insieme C = {(x,y) R : (x + y ) = x } e dire se è una curva
Grafico qualitativo di una funzione reale di variabile reale
 Grafico qualitativo di una funzione reale di variabile reale Mauro Saita 1 Per commenti o segnalazioni di errori scrivere, per favore, a: [email protected] Dicembre 2014 Indice 1 Qualè il grafico
Grafico qualitativo di una funzione reale di variabile reale Mauro Saita 1 Per commenti o segnalazioni di errori scrivere, per favore, a: [email protected] Dicembre 2014 Indice 1 Qualè il grafico
Corso di Laurea a Distanza in Ingegneria Elettrica Corso di Comunicazioni Elettriche. Analisi dei segnali A.A. 2008-09.
 Corso di Laurea a Distanza in Ingegneria Elettrica Corso di Comunicazioni Elettriche Analisi dei segnali A.A. 2008-09 Alberto Perotti DELEN-DAUIN Segnali continui e discreti Un segnale tempo-continuo è
Corso di Laurea a Distanza in Ingegneria Elettrica Corso di Comunicazioni Elettriche Analisi dei segnali A.A. 2008-09 Alberto Perotti DELEN-DAUIN Segnali continui e discreti Un segnale tempo-continuo è
1. Distribuzioni campionarie
 Università degli Studi di Basilicata Facoltà di Economia Corso di Laurea in Economia Aziendale - a.a. 2012/2013 lezioni di statistica del 3 e 6 giugno 2013 - di Massimo Cristallo - 1. Distribuzioni campionarie
Università degli Studi di Basilicata Facoltà di Economia Corso di Laurea in Economia Aziendale - a.a. 2012/2013 lezioni di statistica del 3 e 6 giugno 2013 - di Massimo Cristallo - 1. Distribuzioni campionarie
Elettronica e Telecomunicazioni Classe Quinta. La trasformata di Laplace
 Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
Elettronica e Telecomunicazioni Classe Quinta La trasformata di Laplace ELETTRONICA E TELECOMUNICAZIONI CLASSE QUINTA A INFORMATICA INDICE Segnali canonici Trasformata di Laplace Teoremi sulla trasformata
La funzione di trasferimento
 Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Sommario La funzione di trasferimento La funzione di trasferimento Poli e zeri della funzione di trasferimento I sistemi del primo ordine Esempi La risposta a sollecitazioni La funzione di trasferimento
Teoria in sintesi 10. Attività di sportello 1, 24 - Attività di sportello 2, 24 - Verifica conclusiva, 25. Teoria in sintesi 26
 Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Indice L attività di recupero 6 Funzioni Teoria in sintesi 0 Obiettivo Ricerca del dominio e del codominio di funzioni note Obiettivo Ricerca del dominio di funzioni algebriche; scrittura del dominio Obiettivo
Capitolo 1 ANALISI COMPLESSA
 Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Capitolo 1 ANALISI COMPLESSA 1 1.4 Serie in campo complesso 1.4.1 Serie di potenze Una serie di potenze è una serie del tipo a k (z z 0 ) k. Per le serie di potenze in campo complesso valgono teoremi analoghi
Matematica generale CTF
 Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Successioni numeriche 19 agosto 2015 Definizione di successione Monotonìa e limitatezza Forme indeterminate Successioni infinitesime Comportamento asintotico Criterio del rapporto per le successioni Definizione
Matematica e Statistica
 Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Matematica e Statistica Prova d esame (0/07/03) Università di Verona - Laurea in Biotecnologie - A.A. 0/3 Matematica e Statistica Prova di MATEMATICA (0/07/03) Università di Verona - Laurea in Biotecnologie
Basi di matematica per il corso di micro
 Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
Basi di matematica per il corso di micro Microeconomia (anno accademico 2006-2007) Lezione del 21 Marzo 2007 Marianna Belloc 1 Le funzioni 1.1 Definizione Una funzione è una regola che descrive una relazione
7 - Esercitazione sulle derivate
 7 - Esercitazione sulle derivate Luigi Starace gennaio 0 Indice Dimostrare il teorema 5.5.3.a................................................b............................................... Dimostrazioni.a
7 - Esercitazione sulle derivate Luigi Starace gennaio 0 Indice Dimostrare il teorema 5.5.3.a................................................b............................................... Dimostrazioni.a
SIMULAZIONE TEST ESAME - 1
 SIMULAZIONE TEST ESAME - 1 1. Il dominio della funzione f(x) = log (x2 + 1)(4 x 2 ) (x 2 2x + 1) è: (a) ( 2, 2) (b) ( 2, 1) (1, 2) (c) (, 2) (2, + ) (d) [ 2, 1) (1, 2] (e) R \{1} 2. La funzione f : R R
SIMULAZIONE TEST ESAME - 1 1. Il dominio della funzione f(x) = log (x2 + 1)(4 x 2 ) (x 2 2x + 1) è: (a) ( 2, 2) (b) ( 2, 1) (1, 2) (c) (, 2) (2, + ) (d) [ 2, 1) (1, 2] (e) R \{1} 2. La funzione f : R R
Sistemi di controllo industriali
 Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Sistemi di controllo industriali Regolatori PID: funzionamento e taratura Modello, funzionamento e realizzazione pratica Metodi di taratura in anello chiuso Metodi di taratura in anello aperto Un esempio
Complementi di Analisi per Informatica *** Capitolo 2. Numeri Complessi. e Circuiti Elettrici. a Corrente Alternata. Sergio Benenti 7 settembre 2013
 Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
Complementi di Analisi per nformatica *** Capitolo 2 Numeri Complessi e Circuiti Elettrici a Corrente Alternata Sergio Benenti 7 settembre 2013? ndice 2 Circuiti elettrici a corrente alternata 1 21 Circuito
L idea alla base del PID èdi avere un architettura standard per il controllo di processo
 CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
CONTROLLORI PID PID L idea alla base del PID èdi avere un architettura standard per il controllo di processo Può essere applicato ai più svariati ambiti, dal controllo di una portata di fluido alla regolazione
Analisi Complessa. Prova intermedia del 7 novembre 2002 - Soluzioni. (z 11 1) 11 1 = 0.
 11 1 = 0.") Analisi Complessa Prova intermedia del 7 novembre 2002 - Soluzioni Esercizio. Si consideri l equazione z 0. Quante soluzioni distinte esistono in C? Quante di esse sono contenute all interno del disco
Analisi Complessa Prova intermedia del 7 novembre 2002 - Soluzioni Esercizio. Si consideri l equazione z 0. Quante soluzioni distinte esistono in C? Quante di esse sono contenute all interno del disco
REGOLATORI STANDARD PID
 CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICI Ingegneria della Gestione Industriale REGOLATORI STANDARD PID Ing. Luigi Biagiotti Tel. 5 29334 / 5 29368 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare
 L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
L EQUILIBRIO UNIVERSALE dalla meccanica celeste alla fisica nucleare Cap.4 giroscopio, magnetismo e forza di Lorentz teoria del giroscopio Abbiamo finora preso in considerazione le condizionidi equilibrio
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO
 LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
LEZIONI DEL CORSO DI SISTEMI DEL QUINTO ANNO MOD. 1 Sistemi di controllo e di regolazione. Si tratta di un ripasso di una parte di argomenti effettuati l anno scorso. Introduzione. Schemi a blocchi di
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI
 FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
FUNZIONI ELEMENTARI - ESERCIZI SVOLTI 1) Determinare il dominio delle seguenti funzioni di variabile reale: (a) f(x) = x 4 (c) f(x) = 4 x x + (b) f(x) = log( x + x) (d) f(x) = 1 4 x 5 x + 6 ) Data la funzione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO
 SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
SINTESI DEI SISTEMI DI CONTROLLO A TEMPO CONTINUO Requisiti e specifiche Approcci alla sintesi Esempi di progetto Principali reti stabilizzatrici Illustrazioni dal Testo di Riferimento per gentile concessione
LEZIONE 23. Esempio 23.1.3. Si consideri la matrice (si veda l Esempio 22.2.5) A = 1 2 2 3 3 0
 A = 1 2 2 3 3 0") LEZIONE 23 231 Diagonalizzazione di matrici Abbiamo visto nella precedente lezione che, in generale, non è immediato che, data una matrice A k n,n con k = R, C, esista sempre una base costituita da suoi
LEZIONE 23 231 Diagonalizzazione di matrici Abbiamo visto nella precedente lezione che, in generale, non è immediato che, data una matrice A k n,n con k = R, C, esista sempre una base costituita da suoi
~ Copyright Ripetizionando - All rights reserved ~ http://ripetizionando.wordpress.com STUDIO DI FUNZIONE
 STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
STUDIO DI FUNZIONE Passaggi fondamentali Per effettuare uno studio di funzione completo, che non lascia quindi margine a una quasi sicuramente errata inventiva, sono necessari i seguenti 7 passaggi: 1.
Funzioni. Parte prima. Daniele Serra
 Funzioni Parte prima Daniele Serra Nota: questi appunti non sostituiscono in alcun modo le lezioni del prof. Favilli, né alcun libro di testo. Sono piuttosto da intendersi a integrazione di entrambi. 1
Funzioni Parte prima Daniele Serra Nota: questi appunti non sostituiscono in alcun modo le lezioni del prof. Favilli, né alcun libro di testo. Sono piuttosto da intendersi a integrazione di entrambi. 1
FUNZIONE REALE DI UNA VARIABILE
 FUNZIONE REALE DI UNA VARIABILE Funzione: legge che ad ogni elemento di un insieme D (Dominio) tale che D R, fa corrispondere un elemento y R ( R = Codominio ). f : D R : f () = y ; La funzione f(): A
FUNZIONE REALE DI UNA VARIABILE Funzione: legge che ad ogni elemento di un insieme D (Dominio) tale che D R, fa corrispondere un elemento y R ( R = Codominio ). f : D R : f () = y ; La funzione f(): A
3. Quale affermazione è falsa?
 1. Quale affermazione è falsa? Se la funzione f) è continua e monotona crescente su R e se f) = 1 e f4) =, allora ha un unico zero nell intervallo, 4) f) non si annulla mai in R f ) > nell intervallo,
1. Quale affermazione è falsa? Se la funzione f) è continua e monotona crescente su R e se f) = 1 e f4) =, allora ha un unico zero nell intervallo, 4) f) non si annulla mai in R f ) > nell intervallo,
LUOGO DELLE RADICI. G(s) H(s) 1+KG(s)H(s)=0
 H(s) 1+KG(s)H(s)=0") LUOGO DELLE RADICI Il progetto accurato di un sistema di controllo richiede la conoscenza dei poli del sistema in anello chiuso e dell influenza che su di essi hanno le variazioni dei più importanti parametri
LUOGO DELLE RADICI Il progetto accurato di un sistema di controllo richiede la conoscenza dei poli del sistema in anello chiuso e dell influenza che su di essi hanno le variazioni dei più importanti parametri
FUNZIONI / ESERCIZI SVOLTI
 ANALISI MATEMATICA I - A.A. 0/0 FUNZIONI / ESERCIZI SVOLTI ESERCIZIO. Data la funzione f () = determinare l insieme f (( +)). Svolgimento. Poiché f (( +)) = { dom f : f () ( +)} = { dom f : f () > } si
ANALISI MATEMATICA I - A.A. 0/0 FUNZIONI / ESERCIZI SVOLTI ESERCIZIO. Data la funzione f () = determinare l insieme f (( +)). Svolgimento. Poiché f (( +)) = { dom f : f () ( +)} = { dom f : f () > } si
APPLICAZIONI LINEARI
 APPLICAZIONI LINEARI 1. Esercizi Esercizio 1. Date le seguenti applicazioni lineari (1) f : R 2 R 3 definita da f(x, y) = (x 2y, x + y, x + y); (2) g : R 3 R 2 definita da g(x, y, z) = (x + y, x y); (3)
APPLICAZIONI LINEARI 1. Esercizi Esercizio 1. Date le seguenti applicazioni lineari (1) f : R 2 R 3 definita da f(x, y) = (x 2y, x + y, x + y); (2) g : R 3 R 2 definita da g(x, y, z) = (x + y, x y); (3)
Il concetto di valore medio in generale
 Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
Il concetto di valore medio in generale Nella statistica descrittiva si distinguono solitamente due tipi di medie: - le medie analitiche, che soddisfano ad una condizione di invarianza e si calcolano tenendo
CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI
 CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI Abbiamo studiato successioni e serie numeriche, ora vogliamo studiare successioni e serie di funzioni. Dato un insieme A R, chiamiamo successione di funzioni
CAPITOLO 16 SUCCESSIONI E SERIE DI FUNZIONI Abbiamo studiato successioni e serie numeriche, ora vogliamo studiare successioni e serie di funzioni. Dato un insieme A R, chiamiamo successione di funzioni
Principali comandi MATLAB utili per il corso di Controlli Automatici
 Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Principali comandi MATLAB utili per il corso di Controlli Automatici In questo documento sono raccolti i principali comandi Matlab utilizzati nel corso; per maggiore comodità, sono riportati facendo riferimento
Docente: Anna Valeria Germinario. Università di Bari. A.V.Germinario (Università di Bari) Analisi Matematica ITPS 1 / 22
 Analisi Matematica ITPS 1 / 22") Laurea in Informatica e Tecnologie per la Produzione del Software Corso di Analisi Matematica Calcolo differenziale e approssimazioni, formula di Taylor Docente: Anna Valeria Germinario Università di Bari
Laurea in Informatica e Tecnologie per la Produzione del Software Corso di Analisi Matematica Calcolo differenziale e approssimazioni, formula di Taylor Docente: Anna Valeria Germinario Università di Bari
CONTINUITÀ E DERIVABILITÀ Esercizi proposti. 1. Determinare lim M(sinx) (M(t) denota la mantissa di t)
 (M(t) denota la mantissa di t)") CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
CONTINUITÀ E DERIVABILITÀ Esercizi proposti 1. Determinare lim M(sin) (M(t) denota la mantissa di t) kπ/ al variare di k in Z. Ove tale limite non esista, discutere l esistenza dei limiti laterali. Identificare
Sono casi particolari di MCF : SPT (cammini minimi) non vi sono vincoli di capacità superiore (solo x ij > 0) (i, j) A : c ij, costo di percorrenza
 non vi sono vincoli di capacità superiore (solo x ij > 0) (i, j) A : c ij, costo di percorrenza") Il problema di flusso di costo minimo (MCF) Dati : grafo orientato G = ( N, A ) i N, deficit del nodo i : b i (i, j) A u ij, capacità superiore (max quantità di flusso che può transitare) c ij, costo di
Il problema di flusso di costo minimo (MCF) Dati : grafo orientato G = ( N, A ) i N, deficit del nodo i : b i (i, j) A u ij, capacità superiore (max quantità di flusso che può transitare) c ij, costo di
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica. http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI
 FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
FONDAMENTI DI CONTROLLI AUTOMATICI Ingegneria Meccanica http://web.ing.unimo.it/~lbiagiotti/fondamenticontrolli1415.html SISTEMI ELEMENTARI Ing. e-mail: [email protected] http://www.dii.unimore.it/~lbiagiotti
Grandezze scalari e vettoriali
 Grandezze scalari e vettoriali Esempio vettore spostamento: Esistono due tipi di grandezze fisiche. a) Grandezze scalari specificate da un valore numerico (positivo negativo o nullo) e (nel caso di grandezze
Grandezze scalari e vettoriali Esempio vettore spostamento: Esistono due tipi di grandezze fisiche. a) Grandezze scalari specificate da un valore numerico (positivo negativo o nullo) e (nel caso di grandezze
Dalle misure eseguite con un segnale sinusoidale su di un impianto si è verificato che esso:
 Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Tema di: SISTEMI ELETTRONICI AUTOMATICI Testo valevole per i corsi di ordinamento e per i corsi di progetto "SIRIO" - Indirizzo Elettronica e Telecomunicazioni Il candidato scelga e sviluppi una tra le
Usando il pendolo reversibile di Kater
 Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità
Usando il pendolo reversibile di Kater Scopo dell esperienza è la misurazione dell accelerazione di gravità g attraverso il periodo di oscillazione di un pendolo reversibile L accelerazione di gravità